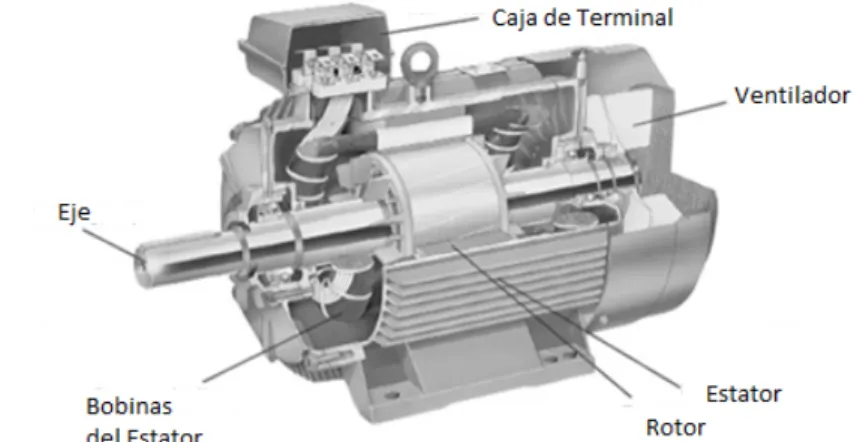
Este trabajo consiste en el análisis del motor de inducción trifásico mediante un modelo no lineal de comportamiento estable para diagnosticar errores aditivos y paramétricos. Consta de un conjunto de placas de aleación de acero de alta resistencia ranuradas y apoyadas en el marco exterior del estator.
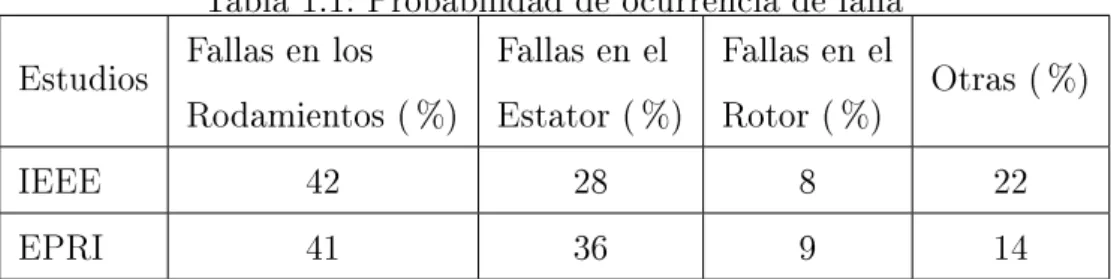
Fallas en los Motores de Corriente Alterna
Fallas mecánicas: dentro de esta categoría se encuentran la rotura de la barra del rotor, el desequilibrio de masa, la excentricidad del entrehierro, los daños en los cojinetes, las fallas en el devanado del rotor y las fallas del estator. La excentricidad estática del entrehierro significa que la posición de la longitud radial mínima del entrehierro está fija en el espacio.
Estado del Arte
El observador de estado utiliza el error de salida entre el modelo del proceso de salida y el ajuste al modelo de salida; esta es una alternativa a la detección de errores basada en modelos. La técnica más utilizada en el diagnóstico de fallas en motores de inducción es el análisis del espectro de frecuencia de una o más señales del motor.
Planteamiento del problema
Objetivos
Obtenga lo último en diagnóstico de fallas de motores de CA. Validar el modelo desarrollado en Matlab con el modelo implementado en el software PSIM.
Justicación
Modelado del Motor de Inducción
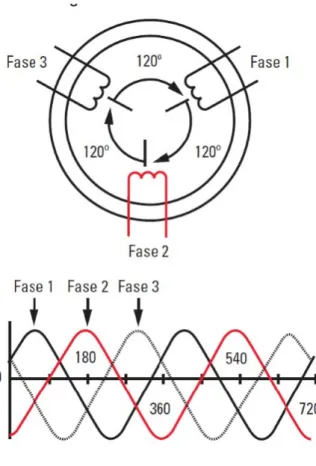
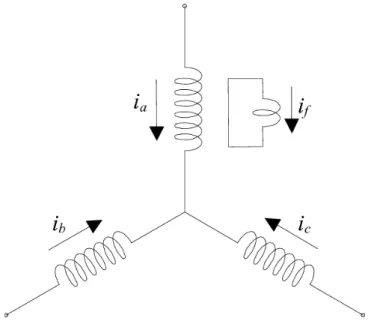
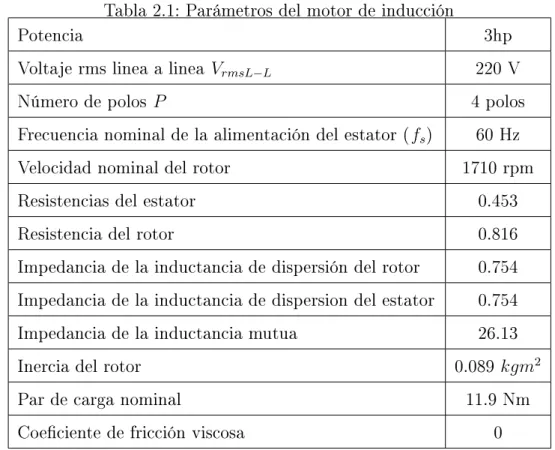
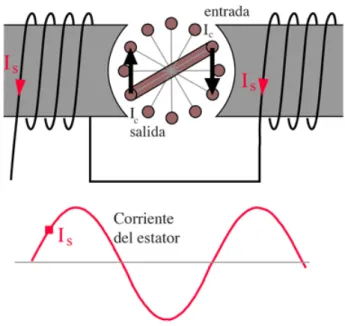
Al motor de inducción con rotor de jaula de ardilla SCIM (Squirrel Cage Induction Motor, por sus siglas en inglés). En este caso, el campo magnético giratorio está formado por la suma de las componentes vectoriales de la fuerza magnetomotriz FMM procedente de los tres devanados del estator desplazados 120◦ entre ellos. Considere el estator (con un par de polos) del motor de inducción trifásico de la Figura 2.2 y el flujo de corrientes en los devanados del estator.
Para representar la circulación de corrientes en los devanados del estator, en la Figura 2.3 se utiliza el diagrama de la Figura 2.2, donde las cruces indican la entrada de la corriente al devanado y los puntos de salida de la corriente, ambos al mismo tiempo. Predecir el comportamiento de todas las señales involucradas en el motor de inducción es una situación que se ha estudiado durante varias décadas y se presenta a continuación utilizando modelos de dinámica de motores de inducción. Y para relacionarlo con la velocidad mecánica del rotorωm, se hace a través del número de polos que tiene la máquina.
J es la incertidumbre del rotor y la carga Kg m2 B Coeficiente de fricción viscosa en N m s/rad τL Es el par de carga N m A continuación se muestran las simulaciones del motor de inducción utilizando los valores nominales, donde el vector de voltaje se muestra a continuación : La Figura 2.6 muestra el comportamiento de las corrientes del estator trifásico bajo los parámetros propuestos, mientras que la Figura 2.8 muestra el resto del comportamiento dinámico de la instalación.
Modelado del motor de inducción en el marco de re- ferencia dqferencia dq
La ecuación de la parte eléctrica del motor se obtiene reemplazando ωs en la ecuación (2.9). Las cargas dinámicas se pueden representar tomando el par electromagnético y el par de carga que en este caso particular se considera fricción. Donde en términos de la velocidad eléctrica del rotor, se deriva de la multiplicación de ambas.
Una vez que las ecuaciones MI para las partes eléctricas y mecánicas están disponibles, con base en las ecuaciones (2.13) y (2.14), se elabora el diagrama de bloques MI como se muestra en la Figura 2.9. Aunque la principal diferencia es que el parámetro de entrada es Vqs en lugar de la corriente de armadura. Hay varias formas de generar residuos utilizando el enfoque de la ecuación de paridad.
Residuos de dirección fija: en respuesta a un error específico, el vector residual se reduce a una dirección de error específica. Las ecuaciones de paridad suelen estar disponibles con formas de entrada y salida del modelo de planta. Los errores aditivos son variables no observables, que incluyen errores en actuadores, sensores y ciertos errores de planta.

Estructura de las Ecuaciones de Paridad
Los errores en general se pueden clasificar en dos grupos, dependiendo de cómo aparecen en las ecuaciones residuales. El método de la ecuación de paridad va precedido de la probabilidad con la formulación del modelo en el espacio de estados. El residual puede formularse nuevamente mediante el error de salida o el error polinómico, correspondiente al método de estimación de parámetros.
El residual es cero para la forma ideal del proceso y modelo, con errores aditivos fu y fy y sin ruido. En general, ∆Gm muestra las desviaciones en el error y el ruido del modelo Rn y la excitación de la señal de entrada dada por u. En el caso de fallas aditivas, el residual cambia y es similar a la salida defectuosa y al proceso de filtrado de fallas de entrada del Gp fu.
Para los errores de entrada aditivos, el fu se filtra por el modelo polinómico Bm(s) y los errores de salida aditivos fy por el polinomio Am(s), de modo que ambos puedan obtenerse con derivadas de orden superior. El residual se considera en un proceso de una entrada y una salida o en ambos casos afectado por errores aditivos en entrada y salida, por ruido y por errores del modelo, y la separación generalmente no es posible. De esta forma, el residual se calcula mediante procesos de medición en señales de entrada y salida.

Ecuaciones de Paridad con Modelo de Espacio de Es- tadostados
Paridad modelo DQ
Una forma de agregar redundancia a las ecuaciones simultáneamente es introducir 3,14 en 3,15 con sus respectivas derivadas. Ahora, el vector residual basado en el modelo de espacio de estados para el tiempo federal se da en 3.9, que se deriva de la generación residual con la ecuación de paridad para el proceso de múltiples entradas y múltiples salidas (MIMO) con funciones de transferencia y polinomios de error. Nótese que durante el estado estacionario la derivada x(t) es cero y Vqst = Vqs, por lo que el resto se puede simplificar, lo cual es muy conveniente cuando el tipo de falla es incipiente; Teniendo en cuenta que es más común en máquinas eléctricas, se puede reducir la cantidad de desperdicio.
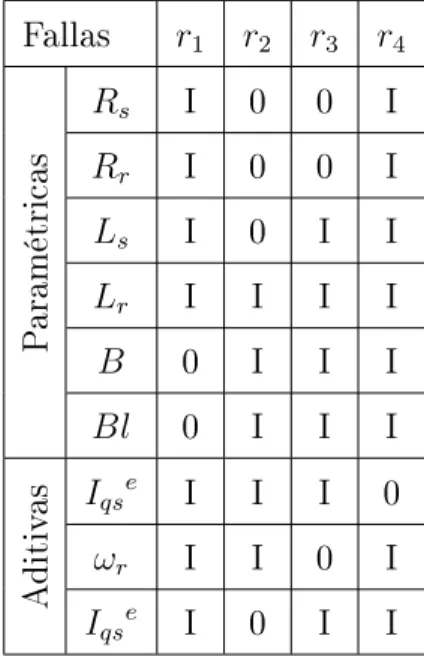
De manera similar, como en el modelo de motor de CC, si ocurre un error aditivo, todos los residuales excepto el desconectado se desvían como se muestra en la Tabla 3.1. Cuando ocurre un error paramétrico en Rs o Rr, no hay un aumento significativo en r3, por lo que se puede considerar un valor cero para simplificar la matriz de detección de errores. La Tabla 3.1 muestra los parámetros relacionados con el diagnóstico de fallas eléctricas en el modelo MI utilizando ecuaciones de paridad basadas en el marco de referencia dq para su linealización.
Por lo tanto, se sugiere analizar las corrientes del estator en particular para identificar con precisión el elemento dañado. La Tabla 3.1 muestra el aislamiento de errores en Rs y Ls para identificar la fase afectada en el diagnóstico de errores en Rs o Ls. Luego, de la matriz anterior de la Tabla 3.1 se ve que la probabilidad de detección de errores para Rs, Rr, Ls, B, Bl y Vqse es 50 y solo para Lr, Iqse y ωr es 100, pero de acuerdo con la Tabla 2: Rs y Ls la probabilidad de detección de errores es 100.
Paridad modelo trifásico
Para el Residuo 1, se sugirió que su wT es insensible a los cambios en los parámetros asociados con la fase a. Para el Residuo 2, se sugirió que su wT es insensible a los cambios en los parámetros asociados con la fase b. Para el Residuo 3, se sugirió que su wT es insensible a los cambios en los parámetros asociados con la fase c.
9] revisó varios trabajos enfocados al diagnóstico de fallas y, comparando las metodologías propuestas, generó un conjunto de tablas donde se clasificaron las diferentes técnicas. Actualmente existe suficiente literatura enfocada al diagnóstico de fallas [13, 31], a continuación se muestra la estructura propuesta por R. Para poder realizar un correcto diagnóstico de los errores que se pueden producir en el objeto de estudio es importante realizar una correcta detección. de los síntomas que puede presentar el sistema.
Diagnostico del modelo DQ
En la Figura 4.1a, la resistencia del estator se ha reducido en un 50 por ciento de su valor nominal para provocar la respuesta de los residuos 1 y 4. En la Figura 4.1b, la resistencia del estator se ha incrementado en un 50 por ciento de su valor nominal para provocar la respuesta de los residuos 1 y 4. En la Figura 4.1c, la resistencia del rotor se ha reducido en un 50 por ciento de su valor nominal para provocar la respuesta. de los residuos 1 y 4 causa.
En la Figura 4.1e, la inductancia del rotor se redujo al 50 por ciento de su valor nominal para inducir la reacción de los residuos 1, 2, 3 y 4. En la Figura 4.1f, la inductancia del rotor se aumentó al 50 por ciento de su valor nominal. valor nominal para inducir la reacción de los residuos 1, 2, 3 y 4. En la figura 4.1g, la inductancia del estator se redujo en un 50 por ciento de su valor nominal para inducir la reacción de los residuos 1, 3 y 4.
En la figura 4.1h, la inductancia del estator se incrementó en un 50 por ciento de su valor nominal para inducir la respuesta de los residuos 1, 3 y 4. En la figura 4.1i, el coeficiente de fricción se redujo en un 50 por ciento de su valor nominal. reacción de los residuos 2, 3 y 4. En la Figura 4.1i, el coeficiente de fricción se incrementó en un 50 por ciento de su valor nominal para inducir la reacción de los residuos 2, 3 y 4.

Diagnostico del modelo trifásico
Conclusiones
Bouattour, Diagnosing parametric faults in non-linear parity induction motors, IFAC Proceedings Volumes, vol Rostaing, Models for detecting bearing damage in induction motors using stator current monitoring, IEEE Transactions on Industrial Electronics, vol Palácios, Stator fault analysis of three-phase induction motors using information measures and artificial neural networks, Electric Power Systems Research, vol.
Benbouzid, A review of signature analysis of induction motors as a medium for fault detection, IEEE Transactions on Industrial Electronics, vol. Lebaroud, Fault detection and diagnosis of induction motors based on hidden Markov model, in Electrical Machines (ICEM), 2012 XXth International Conference on, pp. Rayapudi, Dwt-based bearing fault detection in induction motors using noise reduction, Journal of Electrical Systems and Information Technology, vol.
Toliyat, Diagnosis of stator, rotor and air gap eccentricity faults in three-phase induction motors based on the theory of multiple reference frames, in Industry Applications Conference, 2003. Bazzi, A review and comparison of detection methods and fault diagnosis for squirrel-cage induction motors : State of the art, ISA Transactions, 2017. Besancon, Complete online state and parameter estimation in induction motors and application to control and monitoring, in Control Conference (ECC) , 2001 European, pp.