A diferencia de ellos, nuestro objetivo es crear bifurcaciones utilizando la colisión de puntos de contacto como mecanismo. Nuestro análisis nos permitirá generar bifurcaciones estacionarias y una bifurcación transcrítica de Takens-Bogdan cerca del límite.
Bifurcaci´ on Takens-Bogdanov transcr´ıtica
2.8) Para encontrar la aproximación de la curva de bifurcación homoclínica del sistema (2.8), usaremos el método de Melnikov (ver [12]). Por tanto, para el sistema (2.1), donde el origen es un foco, la curva de bifurcación es homoclínica.
Puntos de tangencia de un sistema cuadr´ atico con frontera
A diferencia de ellos, nuestro objetivo es generar bifurcaciones utilizando como mecanismo la colisión de puntos de tangencia. El equilibrio es virtual si σ(q)<0. i) El punto de tangencia es un punto de plegado o punto de tangencia cuadrática si cTDf(q)f(q)6= 0. ii) El punto de tangencia es un vértice o punto de tangencia cúbica si cTDf(q)f ( q) = 0 , y. Dado que estamos estudiando sistemas con frontera, los puntos de tangencia adquieren gran importancia.
Para caracterizar aquellos sistemas cuadráticos (3.1) con al menos un punto tangente, definiremos la siguiente función real N: Σ→ R, dada por. 16 sistemas cuadráticos con frontera. ii) Si N(q) = 0, el sistema (3.1) tiene un solo punto de contacto: el punto de contacto cúbico o equilibrio límite. iii) Si N(q)>0, el sistema (3.1) tiene dos puntos tangentes: dos puntos tangentes cuadráticos, dos equilibrios límite, o un punto tangente cuadrático y un equilibrio límite. Nuestro principal objetivo es estudiar las bifurcaciones que pueden ocurrir en la interacción de dos puntos en contacto y en particular su colisión.
Tenga en cuenta que µi denota la distancia entre el punto de tangencia qi y el punto fijo q ya que kqi−qk=k(q+µiv)−qk=|µi|kvk=|µi|.
Forma Normal
Todo el análisis realizado en los siguientes apartados se realizará a partir de la forma normal (3.6), para lo cual consideraremos µ1 y µ2 como parámetros de bifurcación, ya que determinan las posiciones de los puntos tangentes. Para conocer la naturaleza del punto tangente cuadrático dado por la definición 3, se debe calcular el valor r = cTDf(q)f(q) para cada punto tangente. Por tanto, el cambio de signo en la función ng2(0, y2), que no depende de los parámetros µ1 y µ2, se convierte en el factor determinante.
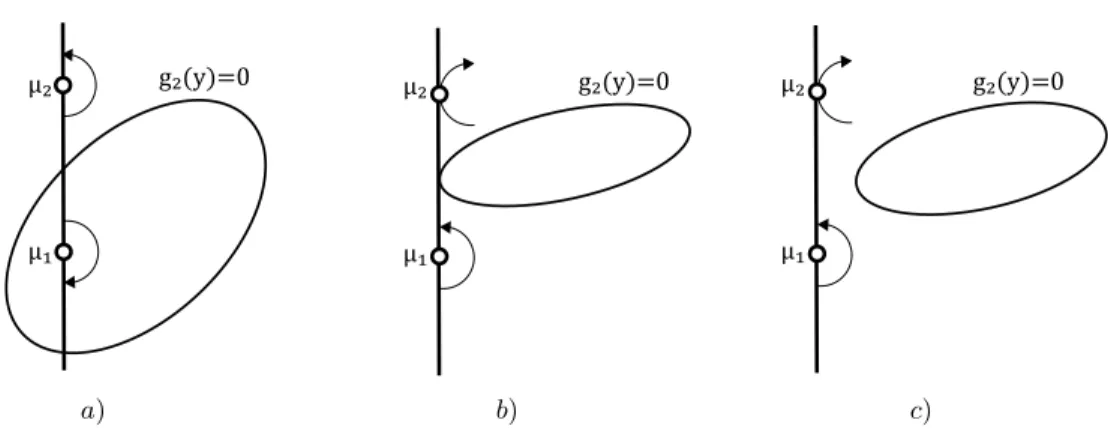
Tenga en cuenta que se pueden obtener puntos tangentes del mismo tipo sólo si la curva g2(y1, y2) = 0 cruza transversalmente el eje vertical en algún punto y teniendo en cuenta los parámetros µ1 y µ2 respectivamente antes y después de este punto, de modo que un Es posible cambiar de signo, ver Figura 3.4 a). De lo contrario, sólo tendremos puntos tangentes de diferentes tipos, como se muestra en la Figura 3.4b) yc). Los desplazamientos de los puntos tangentes determinarán la ocurrencia de varios escenarios muy interesantes, especialmente en la siguiente sección analizaremos la colisión de dos puntos tangentes cuadrados idénticos, Figura 3.4a), mientras que en el Capítulo 4 estudiaremos la colisión de dos puntos. de tangencia cuadrada de diferente naturaleza, en el caso de la Figura 3.4 b), lo que dará lugar a bifurcaciones estacionarias y bifurcaciones transcríticas de Takens-Bogdan, todas las cuales ocurren en el límite, por lo que la elección de µ1 y µ2 como nuestra bifurcación parámetros tiene sentido.
Para el caso presentado en la figura 3.4c) nuevamente existen dos puntos de tangencia cuadrática de diferentes tipos, sin embargo resulta menos interesante, ya que no existe bifurcación de ningún tipo ya que no existen equilibrios cerca de la frontera, en este caso el choque de dos puntos de tangencia cuadráticos crea un punto de tangencia cúbico, por su simplicidad se omite su análisis.

Colisi´ on de dos puntos de tangencia del mismo tipo
Los signos de los valores propios de DG(p0, µ0, µ0), que coinciden con los elementos de la diagonal principal por ser una matriz triangular, se mantienen cerca de p0 y µ0 por continuidad. Esto significa que en una vecindad del origen, tanto para los parámetros como para los estados, coexisten dos puntos tangentes cuadráticos invisibles y un punto de equilibrio en forma de silla de montar, que chocan en un equilibrio límite. La Figura 3.6 muestra la simulación del sistema (3.13) antes y después de la colisión.
En este capítulo analizaremos dos subfamilias de sistemas cuadráticos en el plano, con una recta como límite, dada por la forma normal (3.6) presentada en el capítulo anterior, una de estas subfamilias caracterizada por la existencia de dos puntos de tangente cuadrática de diferente naturaleza, una visible y otra invisible; y el otro caracterizado por la existencia de un punto de tangente cuadrática y un equilibrio límite. En este capítulo establecemos los dos teoremas principales de esta tesis, para la primera subfamilia estableceremos condiciones suficientes para la existencia de bifurcaciones estacionarias: silla-nodo, transcrítica y horquilla, mientras que para la segunda subfamilia, la existencia de las llamadas Se demostrará la bifurcación transcrítica de Taken-Bogdanov (TBT), ver [5], [14] y [18].

Bifurcaciones estacionarias en sistemas cuadr´ aticos con frontera
Como se mencionó anteriormente, nuestro principal objetivo en esta sección es inducir las bifurcaciones estacionarias: silla-nodo, transcrítica y bifurcación en una vecindad del límite, que surgen cuando se cambia la posición de las tangentes alrededor de la intersección del cono. g2(y) = 0 con la frontera y1 = 0, así como cuando chocan. Por el contrario, si ¯a11d23d1 < 0 el punto crítico es un mínimo local, lo que implica que en una vecindad del origen D(μ)>0 habrá por lo tanto dos puntos de equilibrio que pueden colapsar en uno cuando µ= 0, lo que es la bifurcación transcrítica (ver Figura 4.4). La función ∆ es en este caso la discriminante de la ecuación cúbica, por lo que tendremos tres equilibrios si ∆ > 0 y sólo uno cuando ∆ < 0, por lo que las bifurcaciones.
Si ∆ = p = q = 0, entonces los tres equilibrios se han colapsado en uno, esto sucede cuando µ1 = µ2 = 0, provocando una bifurcación tipo horquilla. Comenzamos calculando, utilizando el método resultante, ver [1], la aproximación de la coordenada d1i para cada uno de los equilibrios. Para obtener la aproximación de la coordenada y2, calculamos la solución a la ecuación y1i, y2i) = 0,.
Finalmente, se ha evaluado el determinante de la matriz jacobiana en cada punto de equilibrio pi, para i = 1,2, así como su traza.

Bifurcaci´ on Takens-Bogdanov transcr´ıtica con fron- tera
En el siguiente lema se verifica que el sistema (4.7) satisface las condiciones de no hiperbolicidad necesarias para que ocurra la bifurcación TBT. Para probar la condición G2), primero calculamos la matriz jacobiana del sistema (4.7), es decir. Para obtener la equivalencia −r1 en la primera entrada de la matriz, basta con aislar a11 en la definición de a0 y reemplazarlo directamente. A continuación, establecemos el teorema principal de esta sección, que describe bajo qué condiciones ocurre la bifurcación TBT, en un entorno de frontera, para nuestra subfamilia de estudio.
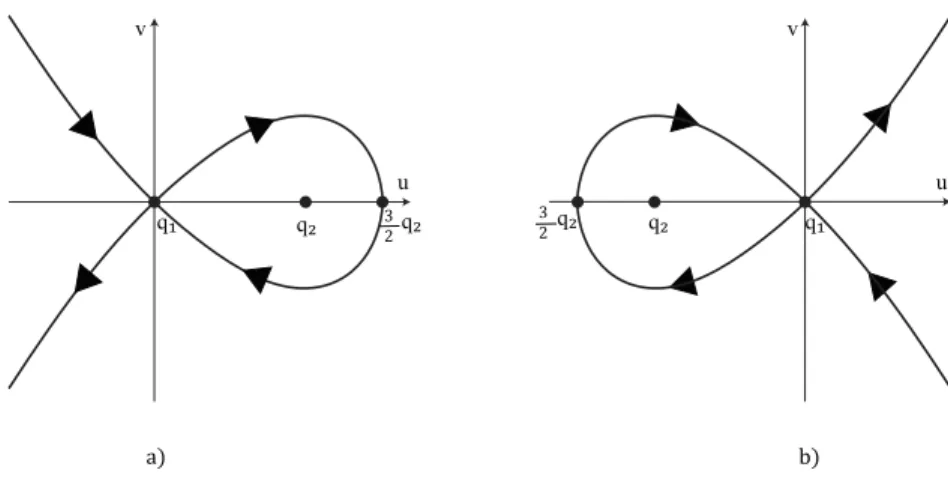
Si Q = (qij), las curvas de bifurcación del sistema (4.7) en una vecindad µ0 suficientemente pequeña vienen dadas por Luego, para encontrar la dinámica del sistema (4.14) cuando cambian las coordenadas (4.15), primero calculamos. Los diversos escenarios para los diagramas de bifurcación y las expresiones para las curvas de bifurcación se obtienen directamente del análisis de bifurcación TBT descrito en la Sección 2.1 Información general.
Ahora, recordemos que el signo der2 tiene efecto sobre el cambio de coordenadas indicado en el Lema 4, por lo que los escenarios aceptables son aquellos donde el bucle aparece en el lado derecho si r2 > 0 o en el lado izquierdo si r2 < 0, e que ocurre cuando ar2 < 0, esta es la hipótesis de aceptabilidad, concluyendo que la bifurcación ocurre en la región deseada.

Ejemplos
Tenga en cuenta que si quisiéramos encontrar la rama en horquilla para el sistema (4.18) mediante su aproximación (4.19), el resultado no sería correcto, ya que no tenemos en cuenta los términos t de tercer grado en la serie de Taylor. , por lo que solo buscamos el nodo silla o bifurcaciones transcríticas. Por tanto, según el teorema 1, la curva de ramificación silla-nodo está en el plano µ1-µ2. El diagrama de bifurcación se muestra en la Figura 4.12, donde ˜N = 0 se traza a lo largo de la curva punteada, con la región ˜N >0 a la izquierda, claramente la curva de bifurcación h= 0, mostrada en una línea continua, pertenece a esta. la misma región.
Para concluir este capítulo, presentamos este ejemplo simple que nos permite ilustrar el Teorema 2 tal como experimenta la bifurcación transcrítica de Takens-Bogdanov. Para sistemas cuadráticos en el plano con frontera, utilizamos cambios en las posiciones de puntos tangentes y la colisión entre ellos como mecanismo para generar bifurcaciones. A través de nuestro análisis pudimos demostrar que, a diferencia de una familia Filippov uniparamétrica en el plano donde dos puntos tangentes en el mismo campo vectorial no pueden chocar si ambos son de la misma naturaleza, ver [17], en el caso de un límite cuadrático de dos parámetros sistemas, esto no sólo es posible, sino que también ocurre en un equilibrio hiperbólico.
En el primer caso se demostró la existencia de bifurcaciones estacionarias: nudo de silla, transcrítica y horquilla, mientras que en el segundo caso se demostró que esta interacción provoca la bifurcación transcrítica de Takens-Bogdanov.