FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA ESCUELA PROFESIONAL DE INGENIERÍA ELÉCTRICA
TESIS
“ANÁLISIS DE LAS CAUSAS DE FALLAS DE OPERACIÓN DEL VARIADOR DE FRECUENCIA DEL MOLINO EN LA SOCIEDAD MINERA “EL BROCAL”
PARA MEJORAR SU CONFIABILIDAD”
CÓDIGO CTI : 0303 0007 Uso eficiente de la energía en el sector industrial y residencial-comercial
CÓDIGO UNESCO : 3306.02 Aplicaciones Eléctricas PRESENTADO POR:
Bach. FERLES ALDO YALLI CLEMENTE
PARA OPTAR EL TÍTULO PROFESIONAL DE:
INGENIERO ELECTRICISTA
HUANCAYO - 2020
ASESOR
M.Sc. Ing. MANUEL DACIO CASTAÑEDA QUINTE
AGRADECIMIENTOS
A todas las personas que me colaboraron desinteresadamente para que se haga realidad el presente trabajo de investigación.
DEDICATORIA
A mis padres y familiares por su apoyo absoluto y continuo durante el tiempo que me forje en la carrera de Ingeniería Electrica.
Índice
Índice ... V Resumen ... XI Abstract ... XII
Introducción ...1
Capítulo I ...2
Planteamiento del Problema ...2
1.1. Caracterización del Problema ...2
1.2. Formulación del Problema...2
1.2.1. Problema general ...2
1.2.2. Problemas específicos. ...2
1.3. Objetivos de la Investigación ...3
1.3.1. Objetivo general ...3
1.3.2. Objetivos específicos. ...3
1.4. Justificación del Estudio ...3
1.4.1. Justificación teórica ...3
1.4.2 Justificación metodológica ...4
1.4.3. Justificación social...4
1.5. Limitaciones del Estudio ...4
Capitulo II...5
Marco Teórico ...5
2.1. Antecedentes ...5
2.2 Descripción sobre el Variador de frecuencia ...5
2.2.1 Área de aplicación de variadores de frecuencia ...5
2.2.2 Descripción general de los variadores de frecuencia ...6
2.2.2.1 Control de velocidad del motor ...6
2.2.3 Aspectos económicos ...7
2.2.3.1 Evaluación del período de recuperación simple...8
2.2.3.2 Evaluación del valor actual neto ...9
2.2.3.3 Costos de capital... 10
2.2.3.4 Ahorro de capital ... 12
2.2.3.5 Costos operativos y ahorros ... 12
2.2.3.6 Ventajas de los VFD: mantenimiento/vida útil ... 13
2.2.3.7 Capacidades de exceso de velocidad ... 14
2.3 Clasificación de los Variadores de Frecuencia ... 14
2.3.1 Variadores de corriente alterna ... 14
2.3.1.1 Variadores de frecuencia variable ... 14
2.3.1.2 Control de motores de rotor bobinado ... 15
2.3.1.3 Motores de varias velocidades ... 16
2.3.1.4 Controladores de velocidad a tensión variable ... 16
2.3.2 Variadores de corriente directa ... 17
2.3.3 Embragues de corrientes parásitas ... 17
2.3.4 Motores avanzados ... 18
2.3.5 Control de velocidad mecánica ... 18
2.4 Principios de Operación del Variador de Frecuencia de Corriente Alterna ... 19
2.4.1 Motores de inducción de corriente alterna ... 19
2.4.2 Motores de inducción de jaula de ardilla ... 20
2.4.3 Variadores de frecuencia con modulación de ancho de pulso ... 20
2.4 Elección de Variadores de Frecuencia ... 22
2.4.1 Aspectos eléctricos de la aplicación de VFD a motores de CA ... 22
2.4.1.1 Fuente de alimentación de los variadores ... 23
2.4.1.2 Armónicos ... 24
2.4.1.3 Efectos de armónicos ... 25
2.4.1.4 Manejo de armónicos... 25
2.4.1.5 Fuente de alimentación separada... 26
2.4.1.6 Transformadores de aislamiento y reactores de línea... 26
2.4.1.7 Filtros ... 26
2.4.1.8 Longitud del cable ... 26
2.4.1.9 Especificación del variador para armónicos ... 26
2.4.2 Criterios de motores ... 27
2.4.2.1 Problemas eléctricos de motores. ... 27
2.4.2.2 Problemas de elección de motores ... 30
2.4.2.3 Problemas físicos y ambientales ... 32
2.4.2.4 Vibración y resonancia ... 34
2.5 Consideraciones de Aplicación y Ahorro Estimado Para Variadores de Frecuencia .... 35
2.5.1 Características de la carga impulsada y la potencia requerida ... 35
2.5.1.1 Eficiencias de motores y accionamientos ... 37
2.5.2 Monitoreo y Verificación... 39
2.5.3 Eficiencia del sistema ... 41
2.5.4 Eficiencia eléctrica ... 41
2.5.5 Fiabilidad y mantenimiento ... 42
2.6 Fallas típicas del variador de frecuencia ... 42
2.6.1 Sobrecorriente ... 42
2.6.1.1 La carga del motor es demasiado pesada para el variador ... 43
2.6.1.2 El aislamiento del motor se está dañando ... 44
2.6.1.3 El aislamiento del cable del motor se está dañando ... 46
2.6.1.4 El frenado dinámico para una desaceleración rápida ... 48
2.6.1.5 Comando de Marcha del motor ... 49
2.6.2 Pérdida de fase de salida ... 49
2.6.3 Sobrecarga del variador ... 56
2.5.4 Fuga a tierra ... 63
2.5.4.1 Localización de fugas a tierra ... 65
2.7 Conceptos Básicos ... 68
2.7.1. Motor de inducción... 68
2.7.2. Molienda ... 68
2.7.3. Confiabilidad ... 68
2.7.4. Vida útil ... 68
2.8 Hipótesis ... 68
2.8.1 Hipótesis general ... 68
2.8.2 Hipótesis específicas. ... 69
2.9 Operacionalización de Variables ... 69
Capitulo III ... 70
Metodología de la Investigación ... 70
3.1 Tipo de Investigación ... 70
3.2 Nivel de Investigación ... 70
3.3 Diseño de Investigación ... 70
3.4 Población y Muestra ... 70
3.4.1 Población ... 70
3.4.2 Muestra ... 71
3.5 Instrumentos de Recopilación de Datos ... 71
3.6 Procedimientos de Recopilación de Datos ... 71
3.6.1 Sobrecarga del variador ... 71
3.6.2 Sobrecorriente ... 72
3.6.2.1 Sobrecalentamiento del motor... 72
3.6.2.2 Configuración no adecuada del variador de frecuencia... 72
3.6.3 Perdidas de fase de salida ... 73
3.6.4 Fuga a tierra ... 73
3.7 Procedimientos de Análisis de Resultados ... 74
Capitulo IV ... 75
Resultados de la investigación ... 75
4.1 Presentación de Datos y Resultados ... 75
4.2 Pruebas de Hipótesis ... ¡Error! Marcador no definido. 4.3 Discusión de Resultados ... ¡Error! Marcador no definido. Conclusiones ... 77
Recomendaciones ... 79
Bibliografía ... 80
Índice de figuras Figura 1. Curva de par-velocidad de un motor de inducción ... 20
Figura 2. Diagrama de rotor de un motor de jaula de ardilla ... 20
Figura 3. Diagrama funcional de un VFD de PWM convencional... 22
Figura 4. Amplitudes de armónicos. ... 24
Figura 5. Formas de ondas de voltaje y de corriente. ... 28
Figura 6. Forma de onda de voltaje de medio ciclo de un inversor PWM típico. ... 28
Figura 7. Efecto de enfriamiento reducido en la capacidad del par. ... 31
Figura 8. Carga de par constante. ... 35
Figura 9. Carga de potencia constante. ... 36
Figura 10. Carga de par variable. ... 37
Figura 11. Eficiencia típica de un motor de inducción de 10 HP de eficiencia estándar frente a la carga. ... 38
Figura 22. Perfil variable de par/potencia/velocidad. Fuente: Schneider S.A. ... 57
Figura 23. Perfil constante de par/potencia/velocidad. Fuente: Schneider S.A. ... 58
Figura 24. Perfil de par/HP constante/velocidad. Fuente: Schneider S.A. ... 58
Figura 25. ABB ACS880-01, tamaños de bastidor R1 a R9, IP21. ... 60
Figura 26. Ejemplo de curva de carga de usuario del ACS880 con referencias de parámetros. Fuente: ABB Inc. ... 60
Figura 27. Ejemplo de selección - Serie GA800 400V. Fuente: Yaskawa America, Inc. ... 63
Figura 28. Requisitos de desconexión del filtro EMC del variador ACS880 para varias configuraciones de tierra de suministro. Fuente: ABB Inc. ... 67
Figura 29. Limpieza del polvo de mineral a los ventiladores y tarjetas electrónicas. ... 75
Índice de tablas Tabla 1. Ejemplos de cargas típicas y su potencial de ahorro de energía. ...7
Tabla 2. Ahorros de energía al reemplazar un regulador de entrada o salida con un VFD. ..8
Tabla 3. Verificación de costos y ahorros del variador de frecuencia. ...9
Tabla 4. Tipos de recintos para protección ... 32
Tabla 5. Eficiencia del variador de frecuencia en función de su potencia nominal. ... 39
Tabla 6. Clasificaciones dobles para VFD de la serie GA800. ... 44
Tabla 7. Solución de problemas de fallas de pérdida de fase de salida de la serie GA800. 50 Tabla 8. Operacionalización de variables. ... 69
Resumen
La introducción de variadores de frecuencia (VFD) para el accionamiento y control del motor fue impulsada por el deseo de aumentar la eficiencia de motor del molino de la Planta Concentradora de Huaraucaca de la Sociedad Minera “El Brocal”, sin embargo, una vez instalado el sistema y en funcionamiento se tuvo fallas por falta de conocimiento de operación y mantenimiento, entonces hubo la necesidad de analizar las causas que originan tales problemas y dar las soluciones del cada uno de los casos.
Para dar solución a este problema al inicio se ha recurrido a la investigación exploratoria por ser un tema algo desconocido y poco estudiado y, luego a la investigación descriptiva para caracterizar los fenómenos que se presentan en el funcionamiento del variador de frecuencia cuando se producen las fallas para analizarlos y corregirlos con el fin de mejorar la confiabilidad del VFD.
Entre las principales causas que ha podido encontrar es el polvo del mineral y la humedad que se aparece en los distintos equipos, como en los ventiladores del variador lo cual hace que no funcionen adecuadamente y aumente la temperatura produciéndose paradas de éste. Al ser el variador de frecuencia un sistema electrónico según normas debe tener una resistencia del sistema de puesta menor o igual a 5Ω, pero se descubrió que mayor y esto también causaba paradas en el variador. Otra causa de falla descubierto después del análisis fue que el valor del aislamiento de conductor de conexión entre el variador y el motor era menor a lo que indican las normas, lo cual al haber fugas de corriente a tierra terminaba por parar al variador. También se pudo detectar que la configuración del variador no era la más adecuada y este generaba sobrecorrientes.
Al conocer estas causas se dio solución y con esto se mejoró la confiabilidad del sistema de molienda.
Abstract
The introduction of frequency variators (VFD) for the drive and control of the motor was driven by the desire to increase the efficiency of the motor of the Huaraucaca Concentrator Plant of Sociedad Minera "El Brocal", however, once the system was installed and in operation, there were failures due to lack of knowledge of operation and maintenance, then there was the need to analyze the causes that originate such problems and to give the solutions of each one of the cases.
In order to give solution to this problem at the beginning, exploratory investigation has been resorted to because it is a topic something unknown and little studied and, later to the descriptive investigation to characterize the phenomena that appear in the operation of the frequency variator when the failures take place to analyze them and to correct them with the purpose of improving the reliability of the VFD.
Among the main causes that have been found is the dust of the ore and moisture that appears in the various pieces of equipment, such as the fans of the drive which does not work properly and increases the temperature producing stops of it. As the frequency inverter is an electronic system according to standards should have a resistance of the system setting less than or equal to 5Ω, but it was found that greater and this also caused stops in the drive.
Another cause of failure discovered after analysis was that the value of the insulation of the conductor connection between the drive and the motor was less than what the standards, which by leaking current to earth ended up stopping the drive. It could also be detected that the configuration of the drive was not the most appropriate and this generated overcurrents.
Knowing these causes was solved and this improved the reliability of the grinding system.
La presente investigación se refiere al tema del variador de frecuencia que controla el motor del molino de la Planta Concentradora de Huaraucaca de la Sociedad Minera “El Brocal”, que presenta problemas de fallas esporádicas en su funcionamiento lo cual baja su confiabilidad y genera pérdidas económicas en el proceso de molienda de mineral.
Las causas de estas fallas eran por falta de conocimiento y capacitación del funcionamiento y mantenimiento del variador de frecuencia por parte del personal que trabaja en el área, este personal en su mayoría no son profesionales relacionados a la ingeniería eléctrica.
La investigación de este problema lo realizamos por el interés de iniciar el análisis del porque sucede estas fallas cada cierto tiempo para encontrar las causas de las mismas, esto permitió encontrar soluciones a cada una de las fallas que se presentaban y de esta forma mejorar la confiabilidad del sistema de control y operación del molino de la empresa minera.
Como empleados de la empresa con conocimientos de ingeniería eléctrica buscamos información con la revisión de antecedentes y el marco teórico que se presentamos en la presente tesis sobre este tipo de problemas lo cual nos ayudó para cumplir con el objetivo de encontrar las causas de fallas y sus soluciones.
Para ello se procedió a realizar una serie de mediciones utilizando instrumentos tales como: Osciloscopio, voltímetro, pinza amperimétrica, megóhmetro, termómetro, telurómetro y otros con el fin de obtener datos de los parámetros eléctricos relacionados al variador de frecuencia.
No se pudo realizar el análisis de los problemas que originan los armónicos que se presentan en el variador de frecuencia debido a no contar en el momento del trabajo con un analizador de redes. Este la única limitación que tuvimos.
Planteamiento del Problema 1.1. Caracterización del Problema
En la Sociedad Minera “El Brocal” tras varios años de operación, cada cierto tiempo se registraba fallas en los variadores de velocidad, especialmente en el variador que controla al motor de inducción del molino de la planta concentradora, esto trae como consecuencia un perjuicio económico de diversa naturaleza a la Sociedad Minera “El Brocal”, ubicada a 4300 m s. n. m. en la localidad de Huaraucaca, distrito de Tinyahuarco, provincia de Pasco de la Región Pasco, las fallas principalmente son disturbios en el abastecimiento de energía, inconvenientes de falla a tierra y configuración del variador.
Es por ese motivo que se decidió hacer un estudio para encontrar las posibles causas que generan dichas fallas para tomar acciones preventivas y correctivas con el objetivo de no acortar la vida útil de los variadores de velocidad, del motor de inducción, del molino y de los equipos ligados a éste. Además, de no perjudicar la normal operación de la molienda del mineral de la empresa ya que esto acarrea no solo retraso en las actividades propias de la minera sino también perjuicio económico.
1.2. Formulación del Problema 1.2.1. Problema general
¿Cuáles son las causas que originan las fallas en el Variador de frecuencia del molino de la Planta Concentradora de Huaraucaca, de la Sociedad Minera “El Brocal” y cuáles las soluciones que incrementarían su confiabilidad?
1.2.2. Problemas específicos.
• ¿Cuáles son las posibles causas que originan fallas en el variador de frecuencia?
• ¿Cuáles son las soluciones preventivas a las fallas del variador de frecuencia para mejorar su confiabilidad?
1.3. Objetivos de la Investigación 1.3.1. Objetivo general
Analizar las causas que originan fallos en el variador de frecuencia que controla al motor de inducción del molino de la Planta Concentradora de Huaraucaca de la Sociedad Minera “El Brocal”, para mejorar su confiabilidad y extender su vida útil y de los equipos ligados a éste, con la intensión de minimizar o evitar pérdidas las cuales redundará en obtener mayores ganancias.
1.3.2. Objetivos específicos.
• Identificar posibles causas que ocasionan fallas en los variadores de frecuencia.
• Formular soluciones preventivas a las fallas del variador de frecuencia para mejorar su confiablidad.
1.4. Justificación del Estudio 1.4.1. Justificación teórica
El rápido incremento en la manejo de tecnologías recientes y metodologías de automatización en la industria ha ocasionado efectos en los distintos eslabones de producción así como sustituciones en la red eléctrica, una de los importantes cambios tecnológicos industriales de los tiempos modernos se basa en la utilización de variadores de frecuencia, que permiten el control de velocidad de motores eléctricos, su aplicación en el presente trabajo es controlar el molino, éste dispositivo se torna indispensable cuando se desea asegurar la continuidad de los procesos involucrados en la industria.
Los proyectistas, directivos e ingenieros de operación y mantenimiento de la Sociedad Minera deben conocer que estos equipos son bastante sensibles a las perturbaciones que se presentan en la red eléctrica que los alimenta y como estos inconvenientes se comportan con los procesos que se desarrollan en la planta concentradora. De ese modo, las fallas que presentan en los variadores de velocidad traen como consecuencia paradas de la molienda,
perjuicio en la producción, mantenimiento correctivo y pérdida de material y, retrasos que se convierten en mermas económicas para la Sociedad Minera.
1.4.2 Justificación metodológica
En la presente tesis el tipo de investigación a utilizar es la aplicada, Se aplicará la técnica de la observación que en este caso consiste en ver en forma sistemática las fallas que se produce en los variadores de velocidad pudiendo ser directa o indirecta a través de los instrumentos de medida. Se desarrolla juicios teóricos y técnicos que corresponde a las áreas de instrumentación, electrónica de potencia, automatización, calidad de energía y otros que están involucrados en este tema.
1.4.3. Justificación social.
Preocuparse por el enriquecimiento y perfeccionamiento de los procesos en la Planta Concentradora, específicamente en el suministro de energía eléctrica de calidad a ésta y dentro de ella dando solución a las paradas por fallas en el variador de frecuencia estaremos contribuyendo en favor de los trabajadores a tener un mayor monto por derecho de productividad y consecuentemente mejorar la calidad de vida mediante la contratación de mano de obra de las poblaciones y comunidades vecinas.
1.5. Limitaciones del Estudio
Para el presente trabajo no se realiza el análisis de armónicos del variador de frecuencia debido que no se tuvieron los instrumentos de análisis de armónicos, por lo cual tuvimos esta limitación.
Marco Teórico 2.1. Antecedentes
Héctor Adolfo Vélez (2016) en su informe de pasantía “Estudio de causas de falla en variadores de frecuencia bajo ambientes industriales” determina los orígenes más frecuentes de fallas de los variadores de frecuencia desde la perspectiva de la calidad de la energía eléctrica.
José Manuel Piñero Rueda (2015) en su proyecto de fin de carrera “Control de un motor de inducción usando un variador de frecuencia” explica la forma de control mediante un variador de frecuencia de un motor asíncrono.
2.2 Descripción sobre el Variador de frecuencia
2.2.1 Área de aplicación de variadores de frecuencia
A continuación, se proporciona una descripción general de la tecnología de variadores de frecuencia (VFD del inglés: Variable Frecuency Drive) con el objetivo de facilitar la comprensión, selección, aplicación y operación de VFD. El término "VFD" en la presente nos referimos al variador de frecuencia electrónico y no se cubre otros accionamientos de velocidad variable o accionamientos de velocidad variable controlados por dispositivos mecánicos o hidráulicos.
Nos dedicaremos a los VFD de bajo voltaje disponibles comercialmente que se utilizan con motores de inducción de corriente alterna en el rango entre potencias fraccionarias y 500 HP y que son:
• Un voltaje menor o igual a 600 V
• Tipo IGBT PWM (modulación de ancho de pulso utilizando transistores bipolares de puerta aislada)
• Disponible comercialmente
Para elegir el VFD adecuado para su aplicación, es beneficioso comprender la tecnología, conocer las necesidades específicas de su carga y hacerse la pregunta correcta desde el principio. Esta pregunta debe ser: ¿Mi perfil de carga varía lo suficiente como para justificar un VFD?
2.2.2 Descripción general de los variadores de frecuencia
Un variador de frecuencia es un dispositivo que varía el voltaje y la frecuencia de suministro a un motor, regulando así la velocidad de ese motor y el sistema que maneja. Al cumplir con los requisitos del proceso, se mejora la eficiencia energética del sistema. Un VFD puede controlar tanto la velocidad como el par de un motor de inducción.
Por lo tanto, un VFD proporciona un rango de regulación continua de la velocidad de un proceso (en comparación con el control de velocidad discreto proporcionado por las transmisiones o los motores de varias velocidades).
Los VFD a veces se denominan con otros nombres como: unidades de velocidad variable, unidades de velocidad ajustable o inversores
2.2.2.1 Control de velocidad del motor
Los motores de inducción de CA (corriente alterna) son, en esencia, máquinas de velocidad constante, y su variación de velocidad entre el funcionamiento sin carga y el funcionamiento a plena carga es del orden del 2 al 5%, correspondiente al `` deslizamiento '' del motor.
La velocidad de la máquina está determinada por la frecuencia de la tensión de alimentación y por el número de polos magnéticos del estator.
La mayoría de las aplicaciones utilizan motores de velocidad fija. En estas aplicaciones o sistemas, se utilizan elementos de control como registros y válvulas para regular el flujo y la presión. Estos dispositivos generalmente resultan en un funcionamiento ineficiente y pérdidas de energía, debido a su acción de estrangulamiento.
Por otro lado, a menudo es deseable tener un motor que funcione a dos velocidades establecidas (o más), oa una velocidad que varíe continuamente. Los actuadores convencionales a menudo se pueden reemplazar incorporando una operación de velocidad variable proporcionada por un VFD.
En la mayoría de estas aplicaciones, se pueden lograr ahorros de energía considerables variando la velocidad de los motores y las cargas accionadas utilizando un VFD disponible comercialmente. Los ahorros incluyen los costos de inversión y mantenimiento asociados con estos controladores.
Tabla 1
Ejemplos de cargas típicas y su potencial de ahorro de energía.
Tipo de carga Aplicaciones Aspectos energéticos
Carga de par variable
• La potencia varía según el cubo de velocidad.
• El par varía según el cuadrado de la velocidad.
• Ventiladores centrífugos
• Bombas centrífugas
• Sopladores
• Sistemas de
climatización
Una velocidad de operación más baja resulta en ahorros de energía considerables ya que la potencia absorbida por el motor disminuye proporcionalmente al cubo de la velocidad.
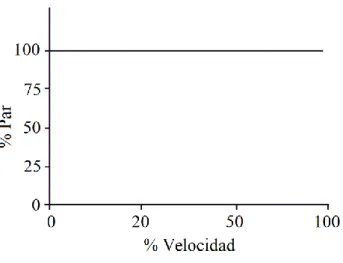
Carga de par constante
• La pareja permanece igual independientemente de la velocidad
• La potencia varía directamente proporcional a la velocidad.
• Mezcladores
• Transportadores
• Compresores
• Imprentas
Una velocidad de operación más baja ahorra energía directamente proporcionalmente a la reducción de velocidad.
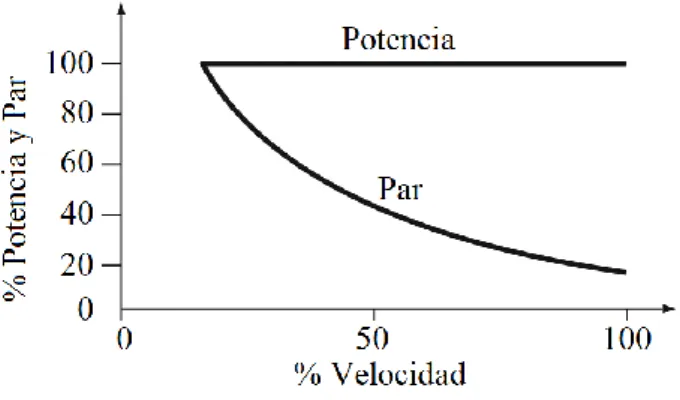
Carga de potencia constante
• Proporciona la misma potencia a todas las velocidades.
• El par varía inversamente con la velocidad.
• Máquinas herramientas
• Tours
• Fresadoras
• Prensas de perforación
Sin ahorro de energía a velocidades reducidas; sin embargo, se pueden lograr ahorros de energía si se logran velocidades de corte y mecanizado óptimas para la pieza producida.
2.2.3 Aspectos económicos
Los aspectos económicos son generalmente uno de los factores más importantes a considerar al elegir equipos industriales, pero el método de evaluación no es tan simple.
Muchas consideraciones económicas importantes a menudo se ignoran en las evaluaciones del VFD.
Tabla 2
Ahorros de energía al reemplazar un regulador de entrada o salida con un VFD.
Volumen de flujo de aire (porcentaje del
máximo)
Tiempo de
funcionamiento diario (horas)
Energía
consumida con regulador (kWh/año)
Energía consumida usando un VFD (kWh/año)
Diferencia en consumo de energía
(kWh/año) 50 %
60 % 70 % 80 % 90 % 100 % Total
2 3 6 6 4 3 24
18 500 29 300 61 700 63 300 44 200 34 200 251 200
4 800 9 800 26 800 35 900 32 600 35 200 145 100
13 700 19 500 34 900 27 400 11 600 -1 000 106 100
Fuente: Oficina de Eficiencia Energética, Recursos Naturales de Canadá.
El ahorro de energía eléctrica es importante, pero hay varios otros factores que deben tenerse en cuenta como parte de una evaluación del costo del ciclo de vida de los equipos.
Por ejemplo, en los casos en que las bombas o los ventiladores funcionan a velocidades reducidas, a menudo se logran ahorros de mantenimiento significativos debido al desgaste reducido de sellos, cojinetes, ejes, etc. En principio, el precio de compra representa menos del 10% de los costos del ciclo de vida cuando se tienen en cuenta los costos de operación y mantenimiento. El aumento de la productividad debido a la reducción del tiempo de inactividad y la reducción del desperdicio debido al control de proceso optimizado también deben considerarse aspectos económicos importantes de los costos del ciclo de vida.
2.2.3.1 Evaluación del período de recuperación simple
El método de recuperación simple a menudo se usa para determinar el tiempo necesario para recuperar la cantidad original invertida en el equipo a través del ahorro de costos que genera. El período de recuperación se calcula de la siguiente manera:
Número de años = Costo total de capital inicial Ahorro anual total
Este método solo debe usarse como indicador de riesgo. La recuperación simple no tiene en cuenta el impacto de varias variables importantes como incentivos fiscales,
inflación, etc.
La tabla 3 nos proporciona una lista de verificación del variador de frecuencia sobre costos y ahorros que puede ayudar a evitar pasar por alto consideraciones económicas.
Tabla 3
Verificación de costos y ahorros del variador de frecuencia.
Costos de capital Ahorro de capital Costos operacionales
y ahorro Otros
• Control
• Motor
• Equipos de acondicionamiento de potencia
• Instalación
• Actualización del sistema eléctrico
• Análisis Torsional
• Requerimientos de espacio
• Enfriamiento
• Válvulas de control
• Caja de cambios
• Acoplamiento fluido/cambio mecánico de velocidad
• Arrancadores de voltaje reducido
• Energía (energía total consumida, cambio de demanda máxima)
• Mantenimiento/vida útil/tiempo de inactividad
• Capacidad de exceso de velocidad
• Valor del rescate
• Implicaciones fiscales
2.2.3.2 Evaluación del valor actual neto
El cálculo del valor actual neto (VAN) es una mejor técnica para evaluar la rentabilidad de una inversión. Basado en la técnica de los flujos de efectivo descontados, el VAN toma en cuenta el valor de retorno del dinero. A continuación, se muestra un resumen de los diferentes pasos de este método:
1. Evalúe los costos / ahorros de los elementos de la tabla anterior para cada una de las opciones consideradas (por ejemplo, compra de un VFD o más bien compra de un sistema de accionamiento mecánico). Los costos de capital se expresarán en dólares totales; Los gastos operativos se expresarán en términos de tiempo.
2. Determine la tasa de descuento real que se utilizará para cada factor de tiempo y cada factor de valor presente proyectado. Por ejemplo, para el cálculo del ahorro energético:
x% por año = tasa de descuento nominal
y% por año = tasa de aumento esperada de las tarifas eléctricas i% = {x / y - 1}%
Como otro ejemplo, el valor residual durante los próximos años se descontará utilizando el aumento porcentual esperado en la tasa de interés entre ahora y "n"
años.
3. Los factores para cada opción deben descontarse a sus valores actuales utilizando las tasas de descuento adecuadas. El número de años utilizado para los factores dependientes del tiempo debe elegirse como correspondiente a un período de recuperación razonable. Las tablas de valor descontado y las tablas de anualidades son muy útiles para el proceso de descuento.
4. El valor actual neto (VAN) de cada opción se obtiene sumando los costos y ahorros que se han calculado en términos del valor presente de cada factor.
5. Para cualquier opción, si:
VAN > 0, hay una ganancia neta VAN <0, hay una pérdida neta
VAN = 0, se alcanza el equilibrio para el período en cuestión.
6. La opción con mayor VAN es la más rentable.
7. El procedimiento se puede repetir durante diferentes períodos de tiempo totales.
8. También se puede hacer una comparación entre dos opciones usando la diferencia relativa entre las opciones para cada uno de los factores y encontrando un VAN.
2.2.3.3 Costos de capital
Unidad de frecuencia variable
El costo del entrenamiento de frecuencia puede diferir considerablemente según las opciones consideradas.
El costo debe incluir:
• Controles de velocidad,
• Controles de encendido / apagado,
• Ingeniería,
• Cables y conductos,
• Fundaciones,
• Repuestos y todas las modificaciones relacionadas.
Por ejemplo, se podría proporcionar una batería de respaldo para los circuitos de control para las secuencias de reinicio o apagado automático.
Motor
Para un sistema nuevo, debe tenerse en cuenta el costo de un motor para variador de frecuencia; por otro lado, si uno planea modernizar un sistema agregándole un VFD, el motor existente tendrá que ser examinado en términos de dimensiones, potencia y eficiencia. En principio, solo deben considerarse los motores de alta eficiencia.
Equipos de acondicionamiento de energía
Incluya el costo de los equipos de acondicionamiento de energía como, por ejemplo, filtros de armónicos. Este equipo incluye filtros para la energía absorbida por el motor, así como acondicionadores de energía que limitan las tensiones y corrientes armónicas devueltas a la red eléctrica por el variador de frecuencia.
Instalación
Deben determinarse los costos de instalación, mano de obra y puesta en servicio del variador y el motor, así como del equipo de acondicionamiento de energía.
Mejora de la red eléctrica
En el caso de que se requiera una mayor confiabilidad que la que ofrece la red actual, puede ser necesario actualizar la red eléctrica. Las posibles actualizaciones incluyen conjuntos de relés de protección, redundancia de transformadores de potencia, interruptores
de transferencia/alimentador de respaldo, capacitación del personal de respuesta a emergencias y programas de mantenimiento preventivo.
Análisis torsional
Un análisis de torsión ayudará a definir los efectos de las vibraciones causadas en el tren de transmisión por los armónicos del inversor. Este análisis debe realizarse para aplicaciones de accionamiento de alta potencia.
Requisitos de espacio
Estos son el costo del espacio interior necesario para el variador y los filtros, así como el costo del espacio exterior para los transformadores, filtros o bobinas de inductancia.
Enfriamiento
La instalación de una unidad puede requerir un sistema de enfriamiento adicional.
Aunque el equipo HVAC se usa a menudo, la refrigeración por agua puede resultar una solución mucho más económica para aplicaciones de alta potencia.
2.2.3.4 Ahorro de capital
El uso de un VFD puede evitar una inversión de capital en equipos tales como: caja de cambios, válvulas de control, acoplamientos hidráulicos / cambiadores de velocidades mecánicos y arrancadores de voltaje reducido.
2.2.3.5 Costos operativos y ahorros
Ahorro en energía eléctrica y demanda
Se pueden lograr ahorros tanto en términos de costos de energía consumida (kWh) como de demanda pico (kW). El tamaño de estos ahorros depende del perfil de carga específico de la aplicación, el perfil de carga general en la red, la escala de tarifas de la empresa de servicios públicos local, etc. La instalación de un VFD, además de los otros beneficios, generalmente reducirá la energía total consumida ( kWh). Los fabricantes y las empresas de servicios públicos tienen hojas de cálculo en línea que se pueden descargar,
generalmente sin costo, y se utilizan para estimar los ahorros eléctricos.
Aparte de las ventajas propias, la instalación de un VFD normalmente resultará en una disminución en la energía total consumida (kWh). Los fabricantes y las compañías eléctricas ofrecen hojas de cálculo descargables en línea, generalmente gratuitas, para realizar estimaciones de ahorros eléctricos.
El otro factor en el costo de la energía eléctrica es la carga aparente medida en kVA y que compensa a la empresa de servicios públicos por el pico de corriente que se suministrará durante el mes. Cada empresa tiene una escala de tarifas diferente; comuníquese con el suyo para ver si las tarifas que se le aplican son adecuadas para usted.
Mejoras en el flujo de operaciones y operación
La instalación de un VFD a menudo dará como resultado mejoras operativas o de proceso y estas ganancias de eficiencia deberán tenerse en cuenta en los ahorros.
Eliminación de otros dispositivos de control mecánico
Configurar un VFD puede ayudar a eliminar algunos controles mecánicos, como válvulas de control y amortiguadores. Los costos asociados con la compra y el mantenimiento de estos dispositivos también deberán tenerse en cuenta en la evaluación de los ahorros de un VFD.
2.2.3.6 Ventajas de los VFD: mantenimiento/vida útil
El uso de un variador de frecuencia de CA de frecuencia variable puede resultar en una reducción relativamente significativa en el mantenimiento y el tiempo de inactividad.
Los factores que contribuyen son la eliminación de las válvulas de control, las funciones de limitación de corriente (que evitan el desgaste del motor causado por múltiples reinicios) y la protección del aislamiento del motor (que estará protegido contra problemas de voltaje externo).
El funcionamiento a velocidades reducidas prolongará la vida útil de equipos como los
rodamientos, por ejemplo. También se reducirá la tensión y la fatiga del metal en los ejes del tren de transmisión.
Las mejoras en la tecnología VFD y las piezas de repuesto "fácilmente disponibles"
han ayudado a reducir significativamente los tiempos de reparación y, en general, no han causado ningún problema operativo.
2.2.3.7 Capacidades de exceso de velocidad
Las capacidades de sobrevelocidad de los VFD tienen la ventaja de ayudar a reducir significativamente los costos operativos y de inversión en caso de que se puedan aumentar los niveles de producción. Por ejemplo, se puede aumentar el flujo de aire de un ventilador existente agregando un VFD (para modernizar el motor del ventilador) que permitirá el funcionamiento a una frecuencia superior a la frecuencia nominal de 60 Hz.
2.3 Clasificación de los Variadores de Frecuencia 2.3.1 Variadores de corriente alterna 2.3.1.1 Variadores de frecuencia variable
Los VFD electrónicos son dispositivos de control de velocidad que varían el voltaje y la frecuencia de suministro de un motor de inducción mediante modulación de ancho de pulso (PWM). Los variadores de frecuencia se han convertido en el medio preferido para variar la velocidad de funcionamiento de una máquina porque son relativamente económicos y extremadamente confiables.
Los VFD utilizan dispositivos semiconductores de potencia llamados transistores bipolares de puerta aislada (IGBT). La modulación de pulso de lapso de tiempo (PWM) se utiliza para regular las características de velocidad y par de un motor para satisfacer las necesidades de la carga. Los variadores de frecuencia convierten la fuente de alimentación de CA de frecuencia fija del motor en una fuente de voltaje y frecuencia variable, y pueden regular la velocidad de un motor de inducción entre 10% y 200%, con rangos más grandes
disponibles dependiendo de modelo y las opciones elegidas.
La precisión de la velocidad es sensible al deslizamiento del motor, que se traduce, para una frecuencia dada, por una velocidad de funcionamiento ligeramente inferior a la velocidad síncrona. La precisión se puede mejorar en gran medida por la señal de retroalimentación de un tacómetro. El control extremadamente preciso de la velocidad y la posición del eje de un motor se logra mediante el uso de un VFD con control vectorial.
El VFD puede ofrecer muchas soluciones que dependen de la aplicación prevista. Un VFD proporciona, por ejemplo:
• Ahorro de energía en aplicaciones de ventiladores y bombas
• Mejor control y mejor regulación del proceso
• La aceleración o desaceleración de una máquina o proceso
• La corrección inherente del factor de potencia
• Posibilidad de aislamiento en caso de emergencia
• Protección contra corrientes de sobrecarga
• Aceleración sin peligro
2.3.1.2 Control de motores de rotor bobinado
Los motores de rotor en espiral son un tipo particular de motor de inducción, que tienen bobinados de rotor de cobre en lugar de las barras de aluminio del rotor de jaula de ardilla convencional. Las conexiones a estos devanados se realizan a través de un conjunto de anillos deslizantes montados en el eje.
Si los devanados están en cortocircuito, el motor funciona como un motor de jaula de ardilla de velocidad fija; pero si agregamos resistencias en el circuito del rotor, el deslizamiento del motor aumenta, lo que permite regular la velocidad del motor. La energía tomada del circuito del rotor durante el arranque se disipa en las resistencias como calor.
Alternativamente, las resistencias pueden ser reemplazadas por un circuito electrónico
para reducir la energía desperdiciada. Este circuito recupera energía y la devuelve a la red eléctrica de CA, lo que aumenta la eficiencia general del motor.
Una vez ampliamente utilizada, esta técnica de control de velocidad del motor ha sido reemplazada en gran medida por VFD electrónicos.
2.3.1.3 Motores de varias velocidades
Los motores de varias velocidades son motores de inducción que tienen estatores con bobinados especiales que permiten variar el número de polos magnéticos conectando los bobinados del motor en diferentes configuraciones.
Los motores de varias velocidades con un solo devanado proporcionan una relación de velocidad de 2 a 1. El cambio de polos se logra conectando los devanados para duplicar el número de polos invirtiendo la corriente en cada grupo de devanados alternos. Esta técnica se llama cambio de polo consecuente.
En el caso de motores con dos devanados, es posible configurarlos de acuerdo con varios números de polos, lo que permite otras relaciones de transmisión. Se obtienen tres velocidades configurando uno de los devanados de acuerdo con el principio de los polos consiguientes, y cuatro velocidades configurando cada uno de los dos devanados de acuerdo con el mismo principio.
Debido a que los motores de dos devanados y de varias velocidades tienen un segundo conjunto de devanados, a menudo son más grandes que sus equivalentes de una sola velocidad de la misma potencia.
Los motores de varias velocidades son una opción relativamente económica en los casos en que se aceptan determinadas velocidades de operación fijas y limitadas.
2.3.1.4 Controladores de velocidad a tensión variable
Estos controladores generalmente usan tiristores (SCR) que controlan la tensión de suministro del motor. Bajo voltaje reducido, un motor se "deslizará" más y, por lo tanto, su
velocidad tenderá a disminuir. Este esquema de control normalmente se limita a aplicaciones de ventilador y requiere un motor de rotor de rotor alto.
El control es impreciso y sus aplicaciones se limitan a motores monofásicos de condensador permanente (MCP). Tales motores se encuentran generalmente en aplicaciones agrícolas para potencias de hasta varios HP. Los controladores de voltaje variable ya no se utilizan en aplicaciones industriales y comerciales.
2.3.2 Variadores de corriente directa
Los motores de corriente directa son esencialmente máquinas de velocidad variable.
El control de velocidad y par se logra variando el voltaje de la armadura, la corriente de excitación o ambos. Anteriormente, para regular la velocidad de un motor de CC, se usaba un grupo convertidor o grupo M-G. En un grupo M-G, un motor de CA acciona un generador de CC que proporciona un voltaje de CC variable para operar el motor. Los grupos de CC son voluminosos, tienen bajo rendimiento y requieren mucho mantenimiento.
Las unidades M-G ahora están siendo reemplazadas por conjuntos de rectificadores controlados por microprocesador que proporcionan un control de velocidad simple y preciso, y ofrecen alta eficiencia y confiabilidad. Sin embargo, debido a la complejidad, el costo y el mantenimiento de los motores de CC, estos conjuntos rara vez se usan en nuevas aplicaciones. Muchas aplicaciones de variadores de CC son reemplazadas por motores de CA con variadores de VFD.
Las nuevas aplicaciones que utilizan motores y unidades de CC suelen ser aplicaciones de ingeniería en las que los motores y unidades de CA no pueden cumplir un requisito de carga. Un ejemplo es para las unidades de tracción donde los requisitos de par de arranque exceden los disponibles en los motores de CA.
2.3.3 Embragues de corrientes parásitas
Los embragues de corriente parásita se pueden usar para controlar motores de
inducción convencionales de jaula de ardilla. Sin embargo, su rendimiento es bajo en comparación con los VFD y sus aplicaciones son limitadas.
Un embrague de corriente parásita comprende esencialmente tres componentes:
• Un tambor de acero accionado directamente por un motor CA
• Un rotor con postes
• Bobinados ubicados en los polos y que proporcionan el flujo variable necesario para la regulación de la velocidad
El voltaje se aplica a los devanados de los polos para establecer el flujo, un desplazamiento relativo que se produce entre el tambor y su rotor de salida.
Al variar el voltaje aplicado, la cantidad del par transmitido varía, lo que permite cambiar la velocidad.
2.3.4 Motores avanzados
Los motores avanzados generalmente se incluyen en una categoría de motores cuya operación utiliza electrónica de potencia y controles de microprocesador. Este concepto se afirmó hace muchos años, pero solo se podía lograr con la electrónica moderna de hoy.
Todos los motores avanzados pueden funcionar a diferentes velocidades.
Están comenzando a usarse en aplicaciones OEM, como motores de soplador para bombas de calor de alta gama y compresores de aire. Algunos motores avanzados ahora son motores de uso general con una potencia nominal de hasta 600 HP. Estos incluyen motores de reluctancia conmutada, motores conmutados electrónicamente y motores de poste escrito.
2.3.5 Control de velocidad mecánica
El funcionamiento de las máquinas de velocidad variable se puede lograr con un motor de velocidad fija equipado con un dispositivo de control de velocidad mecánico. Las aplicaciones incluyen acoplamientos hidráulicos, sistemas de poleas ajustables, controles de velocidad magnéticos y transmisiones mecánicas como transmisiones por correa,
transmisiones por cadena, cajas de engranajes y más.
En los métodos mecánicos de control de velocidad, el motor funciona a una velocidad constante y la elección del acoplamiento cambia la velocidad de la carga accionada. El rendimiento del sistema depende de varios factores, como la tensión de la correa, el tipo y el número de correas y/o cadenas, etc. Los métodos mecánicos convencionales dan lugar a velocidades constantes y predefinidas que no se pueden ajustar dinámicamente para diferentes cargas. Los dispositivos mecánicos de control de velocidad generalmente tienen bajos rendimientos a bajas cargas.
2.4 Principios de Operación del Variador de Frecuencia de Corriente Alterna 2.4.1 Motores de inducción de corriente alterna
Un motor de inducción de CA comprende un rotor cuyas bobinas cortan el campo magnético giratorio generado por los devanados del estator.
A velocidad de carga completa, el rotor gira a una velocidad ligeramente inferior a la velocidad síncrona del motor. Esto se debe a que el campo magnético hace que las corrientes fluyan a través de los devanados del rotor, lo que resulta en un par que impulsa la rotación del rotor. Por lo tanto, si el rotor girara a la misma velocidad que el campo magnético giratorio, el movimiento relativo entre el rotor y el campo magnético sería cero y no se generaría ningún par.
El valor del cambio de velocidad entre el rotor y el campo magnético giratorio se denomina "deslizamiento del motor". El par desarrollado por el motor es tanto más importante como el deslizamiento es mayor.
La velocidad de rotación del campo magnético giratorio depende del número de polos o bobinas distribuidos alrededor del estator, y la frecuencia de la corriente de suministro. Se llama "velocidad sincrónica".
Velocidad sincrónica = 120 x frecuencia Número de polos
Las velocidades típicas de los motores de inducción son: 3600, 1800, 1200 y 900 rpm.
La figura 1 muestra la relación par-velocidad de un motor de inducción estándar.
Figura 1. Curva de par-velocidad de un motor de inducción 2.4.2 Motores de inducción de jaula de ardilla
La mayoría de los motores de inducción de CA son motores de jaula de ardilla.
En este tipo de motor, los devanados del rotor (ver Figura 2) consisten en barras de aleación de aluminio o cobre dispuestas paralelas al eje y que están en cortocircuito por anillos finales de acuerdo con el dibujo a continuación. después.
Figura 2. Diagrama de rotor de un motor de jaula de ardilla
La forma de las barras y la resistencia de la aleación que las constituye influyen en las características de la curva de par-velocidad del motor.
2.4.3 Variadores de frecuencia con modulación de ancho de pulso
Cuando se opera desde una fuente de energía de frecuencia constante (normalmente 60 Hz), los motores de CA de inducción son máquinas de velocidad fija.
Un variador de frecuencia controla la velocidad de un motor de CA variando la
frecuencia de la fuente de alimentación del motor.
El variador también controla el voltaje de salida en relación con la frecuencia de salida, para mantener la relación voltaje/frecuencia (V/Hz) relativamente constante, como lo requieren las características de un motor de CA para generar la frecuencia de salida. pareja adecuada.
El primer paso en el proceso es convertir el voltaje de suministro de CA en un voltaje de CC por medio de un rectificador. La salida de CC contiene rizos de voltaje que son suavizadas por condensadores de filtro. Esta sección de un VFD a menudo se denomina enlace CC.
Este voltaje de CC luego se reconvierte a un voltaje de CA. La conversión se lleva a cabo en principio mediante dispositivos electrónicos de potencia como los transistores bipolares de potencia de puerta con aislamiento IGBT que emplean la técnica de modulación de ancho de pulso (PWM). El voltaje de salida se ajusta y corta a alta velocidad, controlando la duración o el ancho de los pulsos conmutados para obtener una forma de onda cercana a una onda sinusoidal.
Las tecnologías de accionamiento más antiguas, como los rectificadores de corriente constante y los controladores de oscilación de voltaje, utilizaban rectificadores controlados por silicio (SCR) o tiristores como dispositivos de control. Estas tecnologías ahora están siendo reemplazadas por VFD modulados por ancho de pulso (PWM).
Todo el proceso está controlado por un microprocesador que controla:
• La tensión de alimentación de entrada
• El punto de ajuste de velocidad
• El voltaje de la conexión de CC
• El voltaje y la corriente de salida aseguran la operación del motor dentro de los límites de los parámetros predeterminados.
La Figura 3 muestra una unidad VFD de PWM típica.
Figura 3. Diagrama funcional de un VFD de PWM convencional.
En las unidades o aplicaciones más simples, la referencia de velocidad es simplemente un punto de ajuste. Sin embargo, para aplicaciones más complejas, la referencia de velocidad se entrega mediante un sistema de control de proceso, como un controlador lógico programable (PLC) o un tacómetro.
2.4 Elección de Variadores de Frecuencia
2.4.1 Aspectos eléctricos de la aplicación de VFD a motores de CA
Una aplicación exitosa y de bajo mantenimiento de los variadores VFD requiere una buena comprensión de su impacto en el motor y la red de distribución eléctrica.
La aplicación de VFD a motores de inducción dará como resultado efectos que deben tenerse en cuenta para un funcionamiento satisfactorio. Aquí hay algunos ejemplos:
• La capacidad de un motor para limpiarse efectivamente disminuye a medida que disminuye su velocidad. Puede ser necesario sobredimensionar el motor o instalar un sistema de ventilación externo en caso de operación prolongada a bajas velocidades y bajo cargas pesadas.
• La operación a diferentes velocidades puede causar resonancias mecánicas en el equipo accionado. Será necesario identificar estas velocidades de resonancia y excluirlas del rango operativo del motor.
• Los variadores de frecuencia generan tensiones y corrientes armónicas que, en algunos casos, pueden provocar efectos no deseados en la red de distribución de electricidad y afectar el funcionamiento del equipo. Si se sospecha un problema de calidad de las olas, una persona calificada debe inspeccionar la red eléctrica. Para minimizar estos efectos, es posible que sea necesario instalar transformadores de aislamiento, estranguladores de línea o filtros. Para obtener más información, comuníquese con el representante de su compañía de servicios públicos local. Al comprar VFD, es bueno considerar la instalación de dispositivos de filtrado que minimicen la calidad de la onda en la red eléctrica. Se debe recurrir a un especialista calificado en el campo para evaluar y establecer la necesidad de tales dispositivos.
2.4.1.1 Fuente de alimentación de los variadores
Para operar de manera segura, eficiente y confiable, los convertidores de frecuencia requieren energía eléctrica adecuada.
Los variadores monofásicos funcionan con voltajes de suministro estándar de 120 y 240 voltios. Los voltajes estándar de los motores trifásicos son 200, 230, 460 y 575 voltios.
En principio, el voltaje de suministro nominal de la red de distribución es mayor que
el de la placa de identificación del variador, para tener en cuenta las caídas de voltaje entre el transformador de distribución y el punto de uso. En el Perú, la frecuencia nominal es de 60 Hz (hertz o ciclos por segundo).
2.4.1.2 Armónicos
La distorsión armónica del voltaje y la corriente en las redes eléctricas es causada por cargas no lineales como VFD, máquinas de soldar, rectificadores, fuentes de alimentación ininterrumpida (UPS), hornos de arco, etc. Los armónicos deforman la onda eléctrica y esta distorsión puede extenderse a toda la red eléctrica y posiblemente fuera de la planta.
En los VFD, la distorsión armónica se origina en los dispositivos de conmutación de corriente de semiconductores utilizados para producir frecuencias de potencia variables.
Estos efectos, llamados "corrientes de línea armónicas", tienen una frecuencia que es un múltiplo de la corriente de la fuente de alimentación fundamental a 60 Hz. Por ejemplo, una frecuencia de 180 Hz corresponde al tercer armónico. Estas corrientes causan distorsiones armónicas del voltaje que, la mayoría de las veces, exceden los niveles aceptables.
Figura 4. Amplitudes de armónicos.
Las amplitudes de los armónicos impares disminuyen con el aumento de su frecuencia, por lo que los armónicos de los rangos más bajos son los más importantes. Los sistemas VFD normalmente no generan armónicos pares.
Los armónicos existen mientras exista el equipo que los genera y su amplitud tiende a permanecer estable. Es probable que los armónicos sean amplificados considerablemente por los condensadores de corrección del factor de potencia. La inductancia de la red de suministro puede, para ciertas frecuencias armónicas, resonar con los condensadores y generar corrientes y voltajes de valores altos que pueden dañar el equipo.
2.4.1.3 Efectos de armónicos
Los microprocesadores, las máquinas controladas numéricamente y los sistemas de control de procesos solo pueden funcionar a partir de señales de control precisas. La existencia de armónicos puede causar anomalías en el funcionamiento de estos dispositivos.
Los armónicos también pueden causar interferencia con las computadoras y la operación incorrecta de los equipos electrónicos. También pueden causar la falla de condensadores y fusibles. En presencia de armónicos actuales, los motores funcionan a temperaturas más altas y, por lo tanto, consumen más energía porque tienen que compensar el "contra-par" creado por los armónicos impares.
Esto puede provocar la ruptura prematura de los materiales de aislamiento y una disminución de la vida útil. El motor también verá disminuir su eficiencia general y tendrá que soportar tensiones de tensión en sus devanados y pulsos de par.
2.4.1.4 Manejo de armónicos
Si se sospecha un problema armónico, debe confirmarse antes de intentar cualquier acción correctiva. Una prueba bastante simple es visualizar las formas de onda de la red eléctrica en un osciloscopio. Una distorsión notable de la forma de onda es una indicación de la presencia de armónicos. Los analizadores de armónicos de potencia miden la amplitud de los armónicos individuales. En general, es mejor confiar este trabajo a un experto especializado en calidad de alimentación.
Los usuarios tienen a su disposición varias soluciones para resolver estos problemas;
primero deben asegurarse de que la instalación cumpla con el código eléctrico aplicable y que el sistema de puesta a tierra cumpla con los estándares:
2.4.1.5 Fuente de alimentación separada
Idealmente, las cargas armónicas, así como las cargas sensibles, deberían ser alimentadas por arterias totalmente separadas y transformadores independientes.
2.4.1.6 Transformadores de aislamiento y reactores de línea
Para proteger el variador y también la línea de suministro de energía contra la distorsión, a menudo se utilizan transformadores de aislamiento y reactores de línea.
2.4.1.7 Filtros
Los filtros armónicos se utilizan para reducir la amplitud de una o más corrientes de frecuencia específicas para evitar que entren en el resto de la red. Los filtros pueden diseñarse a medida para adaptarse al entorno eléctrico.
2.4.1.8 Longitud del cable
La longitud de los cables debe ser lo más corta posible, es decir. menos de 15 m o 50 pies, siempre que sea posible.
Una buena práctica ampliamente aceptada es comprar un sistema de accionamiento completo que incluya reactores de línea, en lugar de comprar el accionamiento solo. Como regla general, una inductancia de línea con una impedancia de 3 a 5% evitará que los armónicos generados por un variador VFD interfieran con el equipo sensible suministrado por la red eléctrica.
Si las cargas no lineales superan el 20% de la carga total de la planta, sería aconsejable realizar un estudio de los armónicos y minimizar su posible impacto instalando, además de las inductancias de línea, transformadores de aislamiento.
2.4.1.9 Especificación del variador para armónicos
Las especificaciones de los variadores generalmente están marcadas de la siguiente
manera: "El equipo de acondicionamiento de energía no debe causar distorsión de voltaje o muescas de conmutación mayores que los límites recomendados por la Norma IEEE 519";
pero el significado no está necesariamente claro para una instalación en particular. Qué significa cumplir con el estándar IEEE 519 al instalar una unidad en un sistema de suministro de energía.
Desde un punto de vista práctico de las aplicaciones del variador, cumplir los requisitos de armónicos significan que los variadores deben tener en sus terminales de salida una distorsión armónica total de la corriente de menos del 5% para la carga nominal. Para las bajas potencias de accionamiento encontradas con las cargas de par variable, la tasa de distorsión armónica (THD) de la corriente medida por un analizador armónico puede ser mayor del 5%, pero la amplitud de la corriente armónica será menor que la producida a plena carga.
2.4.2 Criterios de motores
2.4.2.1 Problemas eléctricos de motores.
Los sistemas de aislamiento de bobinados se clasifican según su resistencia a la temperatura o sus capacidades térmicas. Las pruebas para establecer las propiedades térmicas de las instalaciones de bajo voltaje no deben someter su aislamiento eléctrico a tensiones superiores a 600 voltios.
Cuando está funcionando, un VFD de PWM puede generar transitorios de voltaje de valor significativamente más alto que el voltaje nominal del motor, lo que podría causar que el sistema de aislamiento eléctrico falle en muy poco tiempo.
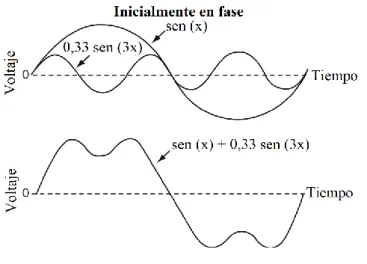
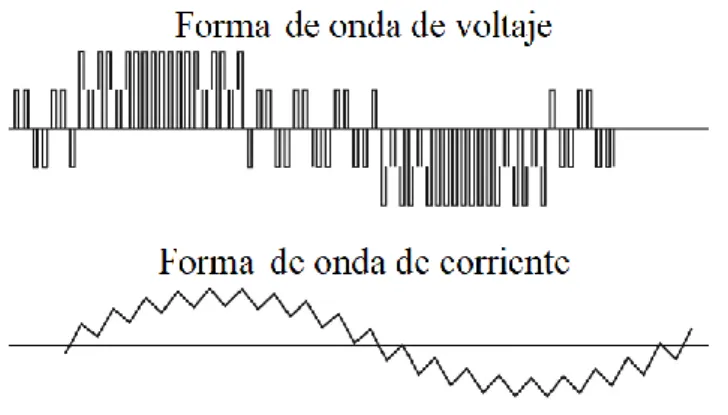
Para comprender este fenómeno, examinemos cómo un inversor PWM hace posible obtener una forma de onda de corriente cercana a una onda sinusoidal. Las siguientes figuras muestran las formas de onda de voltaje y corriente típicas de los inversores modulados por ancho de pulso (PWM).
Figura 5. Formas de ondas de voltaje y de corriente.
La forma de onda de voltaje consiste en una serie de pulsos controlados por los dispositivos de salida del inversor. El ancho o la duración de estos pulsos se controla de modo que la forma de onda se aproxime a una forma sinusoidal. La Figura 6 muestra una forma de onda de voltaje de medio período de un inversor PWM típico que funciona en una red de 600 voltios.
Figura 6. Forma de onda de voltaje de medio ciclo de un inversor PWM típico.
La tensión de tensión máxima en el sistema de aislamiento (Vm) puede alcanzar un valor mucho mayor que la tensión nominal del motor y tener tiempos de subida de tensión extremadamente cortos (Figura 6).
Debido a los reflejos o los efectos de resonancia múltiple, la frecuencia puede aumentar como resultado de las interacciones entre la frecuencia de conmutación PWM y la forma de onda, la longitud de los cables de alimentación del motor y la inductancia del motor.
Es probable que las ondas estacionarias o un "efecto de oscilaciones parásitas"
produzcan una reflexión de voltaje que puede alcanzar más del doble del voltaje aplicado; y esto se vuelve aún más problemático con cables de mayor longitud (generalmente mayores de 15 m o 50 pies).
Un "efecto de oscilación parásita" produce tensiones de muy alta tensión en las primeras vueltas de los devanados del motor, lo que puede provocar cortocircuitos temporales y la falla del aislamiento a tierra.
Este problema puede minimizarse instalando filtros apropiados, instalando motores de accionamiento de velocidad variable con aislamiento reforzado y asegurando que los motores reparados tengan un aislamiento mejorado.
En muchos VFD, el usuario puede ajustar la frecuencia de conmutación. Esta frecuencia se puede establecer dentro de un rango muy amplio de entre 500 Hz y 20 kHz. La elección de la frecuencia de conmutación es muy importante porque determina el número de excesos de voltaje que el motor debe soportar durante un tiempo determinado. Las altas frecuencias de conmutación resultan en un mayor número de sobreimpulsos de voltaje de mayor amplitud, lo que ejercerá una mayor tensión en el aislamiento del motor. Si el voltaje pico nominal del motor es más alto que el nivel de los sobreimpulsos, una alta frecuencia de conmutación no será un problema. Sin embargo, si el nivel de sobretensión de voltaje es mayor que el voltaje pico nominal del motor, una frecuencia de conmutación más baja puede reducir el nivel de exceso de voltaje a un valor por debajo del voltaje pico nominal del motor.
Sin embargo, una frecuencia demasiado baja puede causar un fuerte zumbido del motor, lo que no es deseable en algunas aplicaciones, como los sistemas HVAC.
Los factores a considerar incluyen:
• Reduzca, cuando sea posible, los tramos de cable
• Utilizar inductancias de filtrado de salida del inversor (impedancia típica de 1 a 3%)
• Usar una frecuencia de conmutación más baja
• Para motores nuevos y reparados, utilice envoltura retráctil adicional en las curvas finales, papel aislante, resina impregnada de vacío y presión y esmalte de los alambres de bobinado resistentes a los impulsos (capa triple, capa cuádruple o capa nueva reforzada)
• Mantenga el diseño original de los devanados al rebobinar los motores, ya que la reducción en el número de vueltas conduce a un aumento en los niveles de voltaje eléctrico entre las vueltas.
2.4.2.2 Problemas de elección de motores
Las consideraciones térmicas del funcionamiento del motor con un VFD deberían ser una de las primeras áreas de atención para una aplicación exitosa. A medida que se reduce la velocidad del motor, se reduce la cantidad de enfriamiento disponible del sistema de ventilación del motor, por lo que el par motor debe limitarse a una velocidad reducida para evitar el sobrecalentamiento.
Además de la capacidad de enfriamiento reducida, los motores tienen calefacción interna adicional debido a los voltajes y corrientes no sinusoidales de la operación del inversor. La aplicación de un VFD a una carga de par variable, como un ventilador o una bomba centrífuga, generalmente no presenta problemas, pero el par constante o las cargas de potencia constantes pueden causar el sobrecalentamiento del motor a velocidades reducidas porque hay menos flujo de aire sobre el motor.
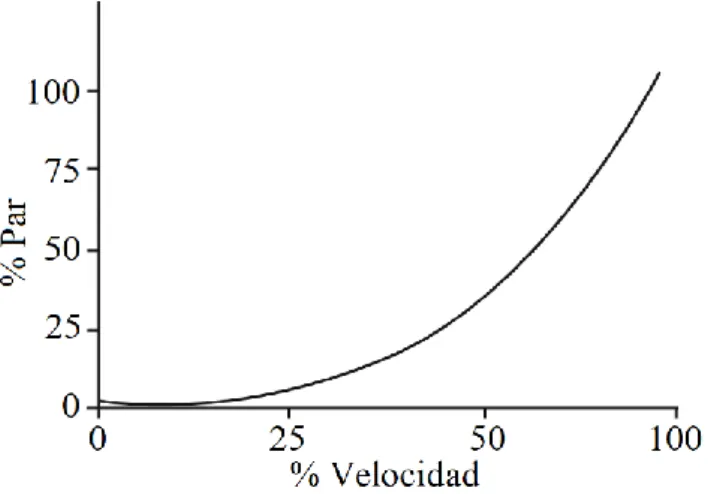
Cabe señalar que muchas aplicaciones en las que un motor de CC ha sido reemplazado por un motor de inducción de CA con un inversor son de la clase de par constante o de potencia constante. La Figura 7 muestra el par disponible de los motores NEMA de Clase A y B, debido a la reducción del enfriamiento al operar a baja velocidad. Esta curva puede servir como guía para reducir la potencia de los motores o seleccionar un motor sobredimensionado apropiado.
Figura 7. Efecto de enfriamiento reducido en la capacidad del par.
En general, se recomienda utilizar un motor con un factor de sobrecarga de 1,15 y aislamiento de clase F para poder soportar un calentamiento adicional debido a los armónicos.
La capacidad de un motor para autoenfriarse efectivamente disminuye a medida que se reduce su velocidad. Puede ser necesario sobredimensionar el motor o instalar un sistema de ventilación externo para una operación prolongada a bajas velocidades y bajo cargas pesadas.
Los "motores de accionamiento de velocidad variable" están diseñados para un rendimiento optimizado cuando se opera con variadores de frecuencia. Estos motores, que en principio tienen mejores sistemas de aislamiento, también pueden ser del tipo de ventilación forzada con ventiladores auxiliares disponibles como opción. Esto les permite operar a una temperatura más baja en lugar de sobredimensionarlos si resultan en cargas de par altas.
Al instalar un inversor PWM, es importante verificar las corrientes inducidas en el eje del motor con anomalías frecuentes o anormales de los rodamientos. Las corrientes inducidas en el eje no son, en principio, problemáticas para motores cuyo diámetro del núcleo es inferior a 20 pulgadas; pero pueden convertirse en un problema en presencia de armónicos de alta frecuencia derivados del uso de un inversor. Los voltajes del eje en exceso de 0.3-0.5
voltios son a veces indicativos de problemas potenciales y pueden requerir conexión a tierra del eje o el aislamiento del rodamiento no impulsor.
2.4.2.3 Problemas físicos y ambientales
Los VFD deben seleccionarse para garantizar que tengan una protección adecuada contra sus condiciones ambientales. Los VFD generalmente se montan en una caja eléctrica con otros dispositivos eléctricos, o como una unidad independiente en su propia caja.
La Asociación Nacional de Fabricantes de Equipos Eléctricos (NEMA) ha determinado tipos de recintos para proteger los equipos eléctricos y proteger a las personas de la exposición a dichos equipos en condiciones ambientales estándar. En la Tabla se muestran los tipos y su protección.
Tabla 4
Tipos de recintos para protección
Tipo Recinto NEMA
1 Uso general - interior 2 Protegido - en interiores
3 A prueba de polvo, lluvia y hielo - exterior 3R Impermeable, resistente al hielo - exterior
3S A prueba de polvo, a prueba de lluvia, a prueba de hielo - exterior 4 Impermeable, a prueba de polvo, resistente al hielo.
4X Impermeable, a prueba de polvo, resistente a la corrosión.
5