Il est donc nécessaire d'utiliser un grand nombre de ces éléments pour approximer correctement la géométrie de la structure, d'autant plus qu'elle est courbe. Les degrés de liberté de ces éléments finis sont les traductions et rotations des nœuds sommets.
Géométrie des éléments plaques [1]
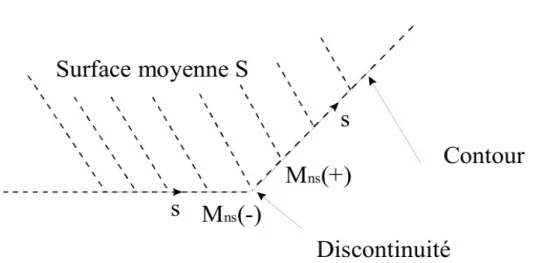
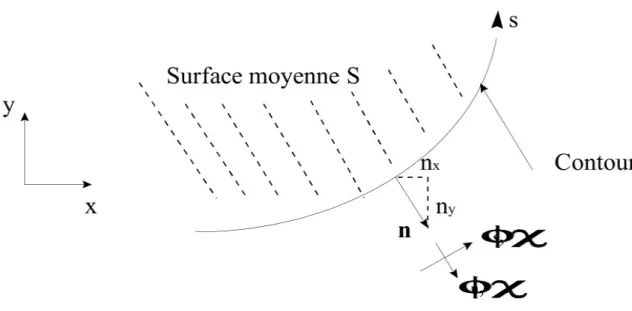
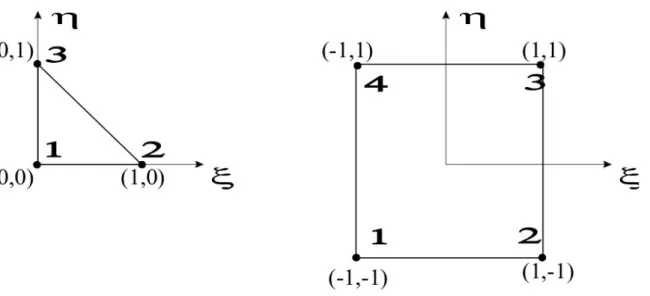
Repère intrinsèque
Théorie des plaques
Cinématique
Dans les théories des plaques, l'introduction de x et y permet de symétriser les formulations des déformations et, comme nous le verrons plus tard, les équations d'équilibre. Dans les théories de coque, on utilise plutôt x et y et les couples associés Mx et My par rapport à x et y.
Loi de comportement
Nous ne décrivons pas la variation de l'épaisseur, ni celle de la déformation transversale ezz, qui peuvent cependant être calculées à partir de l'hypothèse précédente de contraintes planes. De plus, il n’y a aucune restriction quant au type de comportement pouvant être affiché.
Prise en compte du cisaillement transverse [2]
- La théorie dite de Hencky
- La théorie dite de Reissner (DST, DSQ et Q4 g )
- Équivalence des approches Hencky-Love-Kirchhoff et Reissner
- Remarques
- Calcul de la contrainte de cisaillement et de la distorsion transverse dans
En effet, la flèche sur la surface moyenne n'est pas égale à la moyenne des flèches sur l'épaisseur de la plaque. Le calcul des contraintes de cisaillement est effectué en considérant : – les équations de bilan de contraintes et de forces généralisées.
Travail de déformation
- Expression des efforts résultants
- Relation efforts résultants-déformations
- Énergie interne élastique de plaque
- Remarques
La matrice Hmf est une matrice de rigidité de couplage entre la membrane et la flexion. L'homogénéisation des coques multicouches peut conduire à une rigidité de membrane non proportionnelle et à des matrices de flexion de ce type.
Travail des forces et couples extérieurs
Principe du travail virtuel
Cinématique de Hencky
Cinématique de Love-Kirchhoff
La cinématique Love-Kirchhoff signifie que sur les contours de la plaque l'effort tranchant est lié au couple. On peut donc avoir des écarts entre les résultats obtenus avec les éléments de Code_Aster et les résultats analytiques obtenus à l'aide de la cinématique de Love-Kirchhoff pour les structures à contours de coins.
Principales conditions aux limites rencontrées [1]
On voit que l'ordre des équations d'équilibre de flexion est plus élevé qu'avec la cinématique de Hencky. Ainsi, le choix de la cinématique de Love-Kirchhoff revient à augmenter le degré des fonctions d'interpolation car une plus grande régularité est requise pour les termes de flèche par rapport aux termes de membrane du fait de la présence de dérivées secondes de la flèche dans l'expression du travail de déformations.
Introduction
La direction X1 de ce repère local est la projection d'une direction de référence d sur le plan de l'élément. Cette direction de référence d est choisie par l'utilisateur qui la définit par deux angles nautiques dans le repère global.
Discrétisation du champ de déplacement
Approche Q4 g
Approche DKT, DKQ, DKTG, DKQG, DST, DSQ
Discrétisation du champ de déformation
Discrétisation du champ de déformation membranaire
Discrétisation de la distorsion transverse
- Pour les éléments finis Q4 g
- Pour les éléments finis du type DKT, DST, DKTG
En rapportant les deux résultats ci-dessus dans l'expression de loc, nous déduisons cela. Il faut maintenant exprimer les rotations données ici dans l'élément de référence en fonction des rotations dans le référentiel local. Pour les éléments DST, cette expression est légèrement simplifiée comme B cβ=0 du fait de la linéarité des fonctions de la forme Nk k =1,2,3.
Précisons également que pour les éléments DKT, DKTG l'expression des forces de cisaillement est calculée à partir de l'équilibre et non à partir du comportement (à partir du comportement on trouverait une valeur nulle des forces de cisaillement, ce qui ne permettrait pas d'atteindre l'équilibre.
Discrétisation du champ de déformation de flexion
- Pour les éléments Q4 g
- Pour les éléments finis du type DKT, DKTG, DST
La relation liant les déformations en flexion au champ de déplacement en flexion est également écrite sous forme matricielle.
Matrice de rigidité
- Matrice de rigidité élémentaire pour les éléments Q4 g
- Matrice de rigidité élémentaire pour les éléments DKT, DKTG, DKQ
- Matrice de rigidité élémentaire pour les éléments DST, DSQ
- Assemblage des matrices élémentaires
- Degrés de liberté
- Rotations fictives
Ces rotations ne sont pas exactement des rotations autour des axes des plaques. 5.5 de la matrice de rigidité locale en blocs de dimension 6.6 en ajoutant une ligne et une colonne correspondant à cette rotation. Ensuite, nous effectuons la transition de la matrice de rigidité locale étendue à la matrice de rigidité globale.
Pour éviter ce souci, il est acceptable d'attribuer une petite raideur à ces degrés de liberté supplémentaires au niveau de la matrice de rigidité locale étendue. 10–6 et 10–3 fois le plus petit terme diagonal de la matrice locale de rigidité en flexion.
Matrice de masse
- Matrice de masse élémentaire classique
- Élément Q4 g
- Éléments du type DKT, DST
- Matrice de masse élémentaire améliorée
- Éléments du type DKT
- Éléments finis du type DST
- Éléments du type Q4 g
- Remarque
- Assemblage des matrices de masse élémentaires
- Matrice de masse « lumpée »
- Modification des termes d’inertie
Nous négligeons les termes d’inertie rotationnelle dans l’expression de la matrice de masse élémentaire. Ainsi, en utilisant une matrice de masse diagonale, on gagne en temps CPU. L’option matrice de masse en vrac n’est donc qu’un choix de modélisation, permettant d’éventuelles comparaisons avec d’autres codes de calcul.
Des termes négatifs apparaissent surtout lors de l'utilisation de la matrice de masse cohérente améliorée (mentionnée au §4.5.2). Par conséquent, pour les éléments abordés ici, nous modifions le calcul de la matrice de masse cohérente utilisée pour calculer la matrice de masse localisée.
Flambement linéaire
Champ de déformation
Lors de la transition de la poutre à la plaque, une certaine équivalence a été supposée entre la longueur de l'élément de poutre et la surface de l'élément de plaque, de sorte que. Nous rappelons que l'approche proposée dans [7] n'est pas rigoureuse d'un point de vue géométrique et qu'elle se concentre sur la maximisation du pas de stabilité.
Matrice de rigidité géométrique [KG]
Le flambement linéaire est uniquement disponible pour les éléments DKT et DKTG avec maillage TRIA3 et QUAD4.
Intégration numérique pour l’élasticité
Intégration numérique pour la matrice de masse
Intégration numérique pour la plasticité et autres lois non linéaires
Discrétisation du travail extérieur
Prise en compte des chargements thermiques
Thermo-élasticité des plaques
Code_Aster couvre trois situations thermoélastiques différentes, où les propriétés thermoélastiques E, , dépendent uniquement de la température moyenne T dans l'épaisseur. Ainsi dans le cas d'une plaque homogène, où le coefficient de dilatation est connu, les efforts thermiques généralisés sont définis à partir des contraintes planes dans l'épaisseur traversante. Les contraintes thermiques soustraites aux contraintes mécaniques habituelles sont calculées en trois positions (haut, milieu et bas) dans l'épaisseur.
Cependant, on ne peut pas revenir aux contraintes tridimensionnelles complètes : il faudrait connaître les « correcteurs » dans la cellule de base utilisée pour déterminer les coefficients de comportement homogénéisé. Dans les situations thermo-élastoplastiques ou pour les coques (éléments de la famille COQUE_3D), il est nécessaire d'évaluer les contraintes tridimensionnelles, notamment thermiques, en chaque point d'intégration dans l'épaisseur.
Chaînage thermomécanique
Les éléments de coque thermique de surface sont traités comme des éléments planaires avec une projection de la géométrie initiale sur le plan défini par les 3 premiers sommets. Le chaînage thermomécanique est également possible si la modification du champ de température dans l'épaisseur de la structure ou dans des parties individuelles de la structure est connue grâce à des mesures expérimentales. Elle peut être beaucoup plus riche et contenir un nombre quelconque de points de discrétisation dans l'épaisseur de la coque.
A noter qu'il n'est pas nécessaire pour le calcul mécanique que le nombre de points d'intégration dans l'épaisseur soit égal au nombre de points de discrétisation du champ de température dans l'épaisseur. Le champ de température est automatiquement interpolé aux points d'intégration dans l'épaisseur des éléments de plaque ou de coque au moyen de la commande CREA_RESU opération PREP_VRC2.
Cas-test
Description
Utilisation et développements introduits
Le comportement élastique orthotrope n'est disponible qu'avec le mot-clé DEFI_COMPOSITE, qui permet de définir une coque composite multicouche. L'utilisateur saisit ensuite manuellement les coefficients des matrices de rigidité dans la référence utilisateur définie par le mot clé ANGL_REP. Ce mot-clé (voir [R4.01.01] et [U4.42.03]) permet de définir une coque composite multicouche en partant de la couche inférieure vers la couche supérieure en fonction de ses caractéristiques couche par couche, de son épaisseur, du type de matériau composant et orientation des fibres par rapport à l'axe de référence
Le type du matériau constitutif est produit par l'opérateur DEFI_MATERIAU sous le mot clé ELAS_ORTH. Ces efforts peuvent être réalisés dans le cas-test global ou dans le cas-test utilisateur défini par ANGL_REP.
Calcul en élasticité linéaire
Si l'on veut utiliser ELAS_ORTH avec cisaillement transverse, il faut obligatoirement utiliser la modélisation DST. EPSI_ELNO et SIGM_ELNO qui fournissent les déformations et contraintes aux nœuds dans le repère utilisateur de l'élément en peau inférieure, à mi-épaisseur et en peau supérieure de la plaque, où la position est précisée par l'utilisateur. DEGE_ELNO : affiche les déformations, généralisées par élément aux nœuds, à partir des déplacements dans le repère utilisateur : EXX, EYY, EXY, KXX, KYY, KXY, GAX, GAY.
EFGE_ELNO : qui donne les mises généralisées par élément pour les nœuds à partir des offsets : NXX, NYY, NXY, MXX, MYY, MXY, QX, QY. SIEF_ELGA : qui donne l'effort généralisé par élément aux points de Gauss à partir des déplacements : NXX, NYY, NXY, MXX, MYY, MXY, QX, QY.
Calcul en flambement linéaire
Avec une matrice de transition, vous pouvez passer de degrés de liberté locaux à des degrés de liberté globaux.
Calcul en plasticité ou autre comportement non linéaire
Ce sont des éléments dans lesquels les déformations et contraintes dans le plan de l'élément varient linéairement avec l'épaisseur de la plaque. Deux familles d'éléments finis plaques existent : les éléments DKT, DKQ (ou DKTG, DKQG) pour lesquels la déformation transversale est nulle et les éléments finis à énergie de cisaillement transverse DST, DSQ et Q4G (ou Q4g) pour lesquels elle reste constante et non - nul en épaisseur. Lorsque la déformation transversale n'est pas nulle, les éléments de plaque DST, DSQ et Q4G ne satisfont pas aux conditions d'équilibre 3D et aux conditions aux limites de nullité des contraintes de cisaillement transversal sur les surfaces supérieure et inférieure de la plaque, compatibles avec une déformation transversale constante. déformation dans l'épaisseur de la plaque.
Dans ce cas, la flèche w a l'interprétation du déplacement transversal moyen dans l'épaisseur de la plaque. Pour les éléments de la famille DKTG, seules les relations de comportement globales (relations moment-courbure et forces membranaires - allongements) sont disponibles.
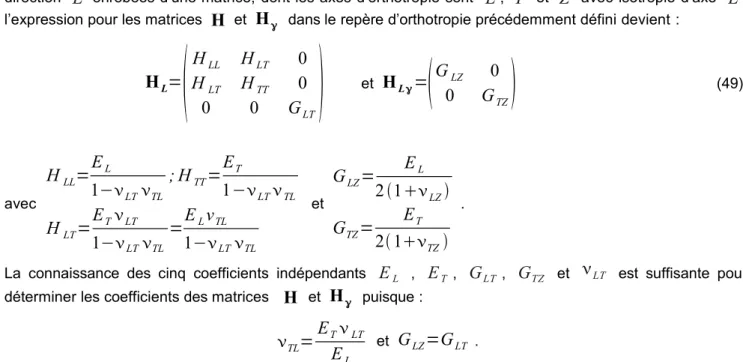
Plaques orthotropes
La matrice Hct est définie pour que la densité surfacique d'énergie de cisaillement transversal obtenue dans le cas de la répartition tridimensionnelle des contraintes due à la résolution à l'équilibre soit égale à celle du modèle de plaque basé sur les hypothèses de Reissner, pour un comportement en flexion simple . Dans le cas où il n'y a pas de couplage en flexion membranaire (symétrie par rapport à z = 0), les contraintes dans le plan des éléments σxx, σyy et σxy ont l'expression en comportement en flexion pur. La validité du choix Hct=C11−1 peut être examinée a posteriori si l'on dispose d'une estimation de la solution (notamment champs de déplacement et de contraintes planes).
Dans le cas d'une plaque homogène isotrope ou anisotrope, l'égalité entre les deux énergies est réalisée au sens strict, puisque D2=0. Techniques d'intégration réduites et sélectives dans l'analyse par éléments finis des plaques, Nuclear Engineering and Design 46, p.