Chacun de ces plans, indexé par k, est défini par les vecteurs bases eik, ej k, extraits de la base orthonormée e1,e2,e3 de l'espace tridimensionnel. Le modèle de Hujeux s'exprime en contraintes effectives – définies comme la différence entre les contraintes totales et la pression de l'eau dans le cas de sols saturés – dans le cas de couplage hydromécanique : c'est-à-dire qu'on ne prend pas en compte la pression hydrostatique du fluide. qui peuvent circuler dans les pores, ceci est calculé dans la modélisation THM.
Définition des variables d’état et expression de l’énergie libre
Variables d’état
Le modèle inclut une élasticité non linéaire régie par le module d'Young en fonction de la pression de confinement. Nous définissons également le tenseur de contraintes déviantes Sk dans le niveau k, en utilisant le tenseur identité d'ordre 2 dans le niveau : Ik=i.
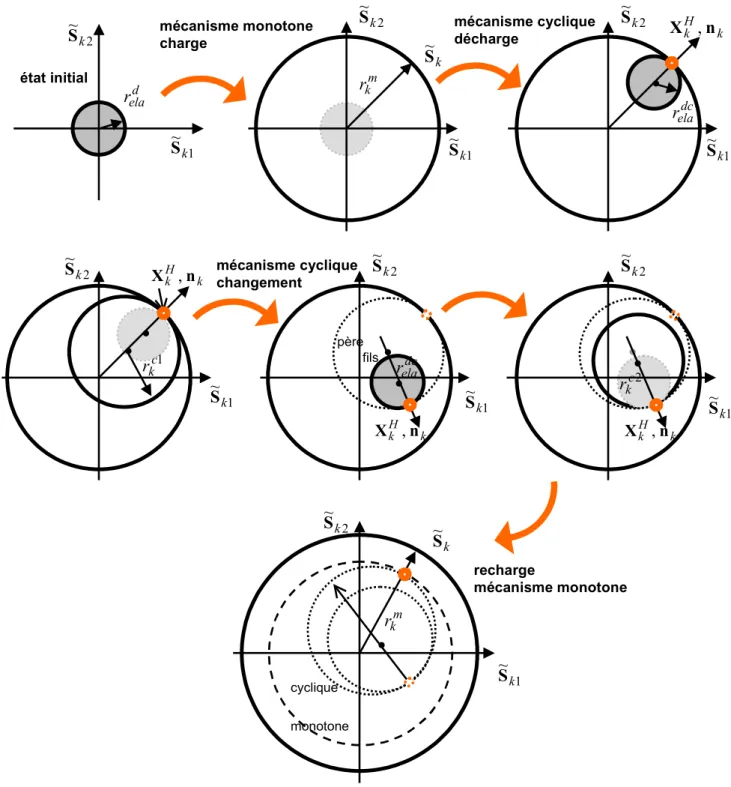
SkH : mémoire tensorvariable discontinue, qui enregistre la valeur des écarts aux contraintes SkH σ dans chaque niveau k, dont l'expression est donnée dans [éq 1.1.1-5].
Loi élastoplastique non linéaire de Hujeux
Les critères (ou surfaces de charge plastique) comprennent la fonction de pression critique, qui caractérise la résistance du sol, en fonction de l'indice de vide dans le matériau (durcissement densité). La pression critique augmente en valeur absolue lorsque le matériau a subi une déformation plastique volumétrique négative (compression).
Mécanismes élastoplastiques déviatoires
- Critères déviatoires en chargement monotone
- Lois d’écoulement et d’écrouissage en chargement monotone pour les
- Critères déviatoires en chargement cyclique
- Lois d’écoulement et d’écrouissage en chargement cyclique
L'expression [éq 1.1.2-8] contribue au calcul de l'augmentation des contraintes ˙ dont on tire l'opérateur tangent, cf. L'expression [éq 1.1.2-18] contribue au calcul de l'augmentation des contraintes ˙, dont on dérive l'opérateur tangent, cf.
Mécanismes élastoplastiques de consolidation sphériques
- Critère de consolidation en chargement monotone
- Lois d’écoulement et d’écrouissage en chargement monotone
- Critère de consolidation en chargement cyclique
- Lois d’écoulement et d’écrouissage en chargement cyclique
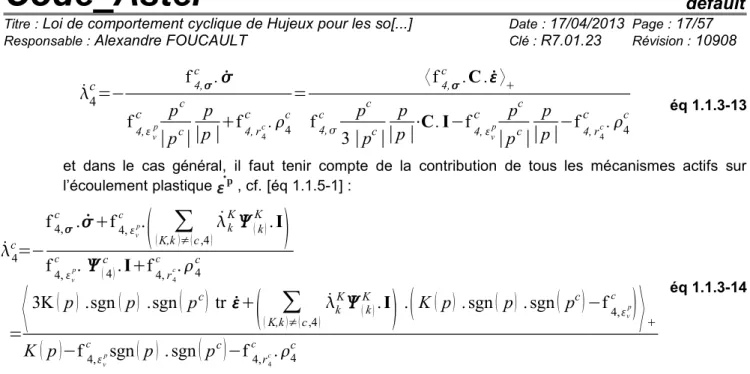
Préf est la pression de confinement de référence et Pcvp la pression critique [éq 1.1.1-13]. L'expression [éq 1.1.3-13] contribue au calcul de l'augmentation des contraintes ˙, dont on dérive l'opérateur tangent, cf.
Traitement de la traction complémentaire à la loi de Hujeux
Le multiplicateur plastique ˙tr est obtenu en résolvant l'équation de complémentarité de Kühn-Tücker ainsi que la condition de cohérence.
Évolution élastoplastique totale
A noter que l'équilibre naturel d'une pente nécessite que l'angle de frottement pp soit supérieur à celui de la pente. L'option RIGI_MECA_TANG calcule l'opérateur tangent Ki−1, pour l'étape de prédiction (linéarisation des équations d'équilibre autour de l'équilibre à l'instant ti−1), à partir des vitesses relatives de contrainte liées aux vitesses de déformation, en utilisant l'opérateur de déformation composite TQ. Mais cela peut augmenter le nombre d'itérations de correction, voire rendre la convergence difficile, notamment à cause de la loi élastique non linéaire que constitue la loi de Hujeux [éq 1.1.1-10].
'TANGENTE' et REAC_ITER), basé sur les contraintes en et la matrice tangente du problème local, discrétisé en temps. Les équations de comportement élastoplastique multi-mécanismes présentées dans le [§ 1] ne permettent pas de démontrer par une analyse simple l'unicité de la solution du problème d'équilibre structurel, discrétisé en temps. Les schémas d'intégration locale choisis pour l'implémentation de la loi de Hujeux dans Code_Aster sont formulés de manière totalement implicite à partir du problème incrémental, pour des raisons de précision de calcul.
L'évolution des quantités calculées à partir du modèle de Hujeux par intégration implicite est considérée comme sensible aux perturbations des données dans l'algorithme d'intégration (par exemple en fonction du choix de la plateforme de calcul ou du choix de la discrétisation spatiale, etc.). . Ce schéma est principalement utilisé par les développeurs pour assurer une évaluation correcte de tous les termes implémentés dans le calcul de la matrice jacobienne locale. ALGO_INTE='NEWTON_RELI', c'est le schéma d'intégration le plus efficace car il utilise une méthode de recherche linéaire locale lors de la résolution du système non linéaire local.

Phase de prédiction
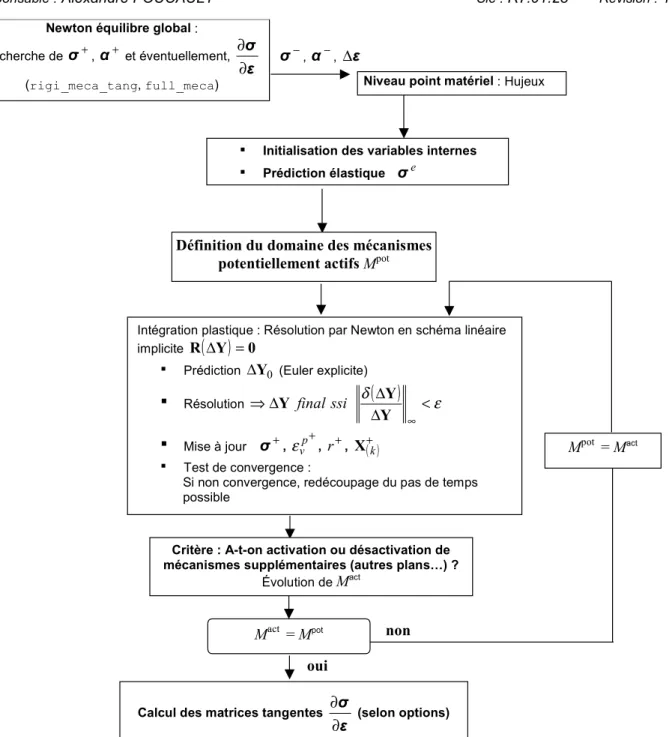
Mécanismes plastiques potentiellement activés
Une famille de mécanismes potentiellement actifs est ainsi prédéterminée au début de l'étape en cours à partir de l'état précédemment atteint, et permet de calculer l'évolution réellement suivie. La sélection initiale des mécanismes éventuellement activés au début du pas de temps considéré du fait de l'état mécanique convergé atteint à l'instant t. Nous utilisons la prédiction élastique [éq 2.2.1-1] pour déterminer une ré-estimation de Mpot en utilisant l'évolution f˙kK pour k=1.
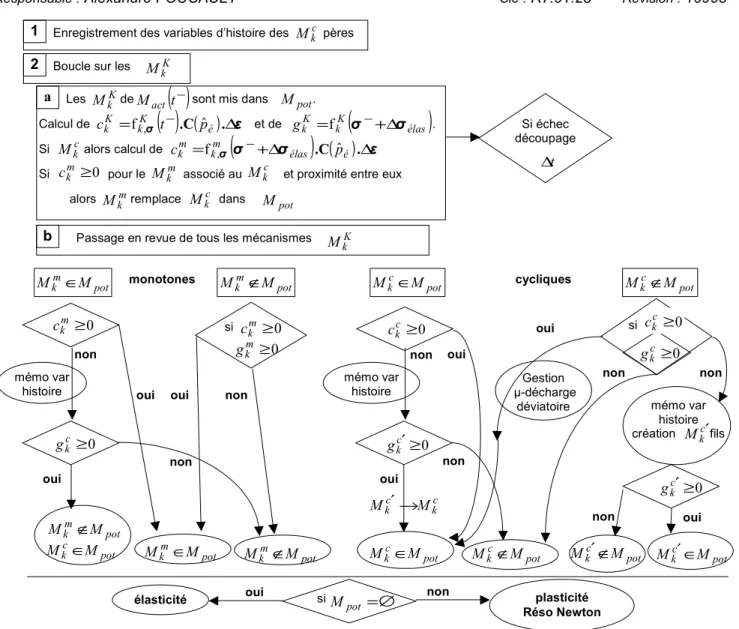
On initialise donc Mpot : =Mact t−, et on enregistre les variables historiques des mécanismes cycliques du « père » −H, à partir de la situation à l'instant précédent t-. Si ckm≥0, Mkm reste alors dans Mpot ; sinon nous stockons les variables historiques correspondantes H et si gkc0 pour le mécanisme cyclique auquel Mkc est associé. Si ckc≥0, Mkc reste dans Mpot ; sinon on retient les variables historiques correspondantes H et si gkc≥0 on garde Mkc dans Mpot, mais si.
Si à l’issue de l’analyse des différentes situations ci-dessus, il ne reste plus de mécanisme dans Mpot, le régime sera élastique, voir cf. Nous cherchons ensuite une solution de test explicite en calculant un candidat kK0 à l'aide des mécanismes potentiellement actifs MkK, en résolvant les équations linéarisées autour de l'état sans évolution plastique é. L'expression de la pression critique est fonction de la déformation plastique volumétrique faisant intervenir une exponentielle [éq on évite le risque de valeurs trop élevées parcourant le domaine de convergence en amorçant une coupure de l'incrément de déformation donné si nécessaire.
Phase de correction : équations non linéaires à résoudre
Itérations de correction de Newton
Sur la base de ces critères, nous introduisons également une limitation sur le développement de la déformation plastique volumique. Pour éviter d'éventuelles intrusions lors des itérations de correction vers des chemins de chargement trop éloignés, qui pourraient conduire à des divergences (en sortant du domaine de convergence locale de l'algorithme de Newton), l'algorithme d'intégration de Hujeux dit que 'SPÉCIFIQUE' impose également une re-division de l'incrément de déformation si l'étape de correction aboutit à la génération d'incréments de facteurs de mobilisation rkK/rkK≥10. La dernière tâche de contrôle du mécanisme décrite ci-dessous se produit après une erreur dans l'algorithme de Newton local ou si les critères spécifiés ci-dessous ne sont pas respectés.
Cependant, ce processus de mise à jour est limité à 5 tentatives de reconstruction, faute de quoi une non-convergence de l'intégration locale est déclarée. Les premiers cas traités s'intéressent, après chaque itération de l'algorithme de Newton local, au risque de chevauchement de deux surfaces de contraintes divergentes, cycliques et monotones ou cycliques et cycliques, dans l'espace des contraintes. Ces problèmes sont évités via des tests de proximité entre la position de l'état de contrainte dans le plan de déflexion considéré et la surface de charge considérée.
Si une condition de traction est détectée après échec de la méthode de résolution, pour chaque multiplicateur plastique associé à un mécanisme de déflexion considéré en Mpot négatif. Ces mécanismes sont ensuite supprimés par Mpot en cas d'échec lors de la résolution du système d'équations non linéaires. Si aucun des traitements spécifiques décrits ci-dessus n'est requis, la non-convergence du modèle à l'échelle locale est supposée et cette information est renvoyée à l'algorithme d'intégration d'équilibre non linéaire global.
Phase de mise à jour
Mécanismes plastiques réellement activés
Pour les différents cas des deux grandes classes décrites ci-dessus (proximité et attraction), si la valeur maximale du vecteur résiduel R Yj est portée par une loi d'évolution d'un facteur de mobilisation du mécanisme de déflexion cyclique Mkc, (soit .équation LR.1 de [eq 6-1]), alors le mécanisme en question est supprimé de Mpot. Cela évite que le seuil du mécanisme monotone soit dépassé par le seuil du mécanisme cyclique. si le mécanisme cyclique Mkc est déclaré créé mais inactif dans Mpot alors :. s'il s'agit d'un mécanisme de dérivation Mkc, alors. Mkc reprend les variables mémoire du mécanisme "père" - qui redevient actif - ainsi que sa valeur derkc, puis le mécanisme "père" est remis à l'état vide ;. s'il n'y a pas de mécanisme "père" et si SckfilsH. alors les variables mémoire àt+ de ce mécanisme Mkc sont stockées dans celles d'un mécanisme. père" dont les valeurs doivent être conservées, et les variables mémoire de ce mécanisme "enfant" Mkc. qui devient actif – devient : si les variables mémoire évaluées avant l'étape Mpot vérifient XHk≠ XHk t − et.
Mkc est activé et nous assimilons également les variables de stockage à t− et t+ ainsi que les valeurs derkc, et sinon, cela ne sert à rien de redémarrer une résolution non linéaire locale ;. si les variables mémoire évaluées avant l'étape Mpot vérifient XHk≠ XHk t− et. ≥0 tot+ les variables mémoire de ce mécanisme Mkc sont remises à l'état vide et Mkm est activé ;. si à t− rkc≠ réladc, alors on enregistre les variables mémoire de ce mécanisme Mkc à l'instant t+. un nouveau "père" est créé) et on remet ce mécanisme rkc+=réladc à un état vide, qui est créé inactif.
Calcul de la matrice de raideur tangente incrémentale
Nous dérivons l'expression de la matrice tangente incrémentale (option FULL_MECA) sur les mécanismes Mact. Le déterminant de la matrice tangente incrémentale det CijrsT , optionnel FULL_MECA, est stocké parmi les variables internes : VARI_33, cf. L'évaluation de la matrice tangente incrémentale par une technique de perturbation (en cas de différences finies pour vérification) n'est pas possible car à Hujeux- le caractère multi-mécanisme du modèle : l'activation effective des mécanismes n'est pas un processus différentiable. selon options) Balance globale Newton :. rigi_meca_tang, full_meca).
Pour l'option RIGI_MECA_TANG utilisée lors de la prédiction globale, appelée à la première itération d'un nouvel incrément de charge L ti , l'opérateur tangent global appelé Ki−1 est calculé à partir des résultats connus à l'instant t− =ti−1 [ bavoir3 ]. L'opérateur tangent global est constitué des contributions de la matrice tangente en chaque point gaussien appelé « en vitesses ». Si dans l'état précédent le tenseur de contraintes n'est à la limite d'aucun seuil plastique, la prédiction élastique ij+é s'écrit selon [éq 2.2.1-1] en utilisant la pression de la limite estimée pé [éq 2.2 .1-2].
Ce choix permet de limiter le risque d'avoir une matrice produisant des prédictions de contraintes trop éloignées des valeurs attendues du fait de la forme exponentielle non linéaire de la loi élastique [éq 1.1.1-11]. Nous dérivons l'expression de la matrice tangente "en vitesses", sur les mécanismes de Mact. Les options RAPH_MECA et FULL_MECA sont utilisées dans les itérations de correction de l'algorithme de Newton utilisé pour la résolution du bilan global à l'échelle de la structure.
L'option FULL_MECA garantit que l'opérateur tangent global Kin est mis à jour à chaque itération globale (à la demande). Il est construit en construisant en chaque point gaussien la matrice tangente incrémentale CijrsT définie dans [éq 2.2.4-3] avec les champs obtenus à la fin de l'itération globale i.