Mots clés liés à la saisie de données dans un calcul basé sur la physique harmonique ou transitoire.
TYPE_CALCUL
BASE_CALCUL
Opérande TITRE
Opérande SOLVEUR
Le terme de force externe est défini par le produit de la matrice de localisation des forces B et du vecteur u. Les termes qr de la combinaison linéaire correspondent aux amplitudes généralisées de l'ensemble du problème projeté sur la base Tr. La base Tr est constituée dans la plupart des cas des modes propres de la structure étudiée.
Matrices généralisées
Considérons le modèle éléments finis d'une structure linéaire présentant des mécanismes de dissipation internes, soumis à des forces externes qui peuvent être connues a priori (charges) mais aussi doivent être évaluées progressivement (forces de choc, de contact, etc.). Résoudre le problème sur la base du modèle complet présenté dans la relation ci-dessus peut s'avérer prohibitif pour des modèles de taille industrielle. Nous postulons donc l'existence d'une base de réduction Tr qui permet une représentation raisonnable du comportement de la structure dans la bande de fréquence d'intérêt.
Mot-clé AMOR_MODAL
Opérandes AMOR_REDUIT / LIST_AMOR
Schémas d’intégration. Mot clé SCHEMA_TEMPS
Opérande SCHEMA
- SCHEMA = 'NEWMARK' : schéma implicite
- SCHEMA = 'DIFF_CENTRE' : schéma explicite d'ordre 1
- SCHEMA = 'DEVOGE' : schéma explicite d'ordre 4
- SCHEMA = 'ADAPT_ORDRE2' : schéma explicite d’ordre 2
- SCHEMA = 'RUNGE_KUTTA_54' : schéma explicite à pas adaptatif
- SCHEMA = 'RUNGE_KUTTA_32' : schéma explicite à pas adaptatif
- SCHEMA = 'ADAPT_ORDRE1' : schéma explicite d’ordre 1
- SCHEMA = 'ITMI' : schéma intégrale pour le calcul de la réponse de systèmes
Le calcul du pas de temps optimal se fait en vérifiant l'erreur entre les approximations d'ordre 5 et 4 de la prédiction du vecteur d'état (concaténation des vecteurs déplacement et vitesse). Pour ce schéma, le calcul du pas de temps optimal est effectué en vérifiant l'erreur entre les approximations du 3ème et du 2ème ordre de la prédiction du vecteur d'état. Le calcul du pas de temps optimal se fait de la même manière que dans le schéma précédent.
Mot clé INCREMENT
Opérandes LIST_INST / PAS / VERI_PAS / PAS_MINI / PAS_MAXI
Dans ce cas il s'agit du schéma d'intégration explicite de Bogacki-Shampine(32) [R5.06.04] avec pas de temps adaptatif. Hormis cette différence, ce schéma s'utilise de la même manière que le schéma adaptatif d'ordre 2 : la syntaxe des mots-clés est la même et les méthodes de contrôle du pas de temps sont également les mêmes. Schémas 'ADAPT_ORDRE1' et 'ADAPT_ORDRE2' : Indique le pas de temps initial utilisé par l'algorithme.
Ensuite le choix du pas de temps dans les algorithmes de Runge-Kutta est géré automatiquement. Vérification du pas de temps de calcul par rapport au pas de temps limite déterminé en fonction de la fréquence la plus élevée des modes de la base modale considérée ou de la base des sous-structures. Opérandes spécifiques à une intégration par pas de temps adaptatifs avec les schémas 'ADAPT_ORDRE1', 'ADAPT_ORDRE2' ainsi que 'RUNGE_KUTTA_54' et 'RUNGE_KUTTA_32' et 'DEVOGE'.
Si les conditions d'augmentation du pas de temps sont remplies, le pas de temps actuel peut être augmenté jusqu'à cette valeur limite. En revanche, d’autres schémas adaptatifs (Runge-Kutta, De Vogelaere) n’auront pas de limites supérieures en termes de pas de temps. Si les conditions de réduction du pas de temps sont remplies, alors le pas de temps actuel peut être réduit jusqu'à cette valeur limite.
Si l'utilisateur ne fournit pas de valeur pour ce paramètre facultatif, alors le code calculera le pas de temps minimum proche de la précision machine.
Opérandes INST_INIT / INST_FIN / NUME_FIN
Mot clé ETAT_INIT
Opérandes RESU / DEPL / VITE
Opérandes INST_INIT / NUME_ORDR
Opérande CRITERE
Opérande PRECISION
Description du chargement sous variables séparées : mot clé EXCIT
Opérandes VECT_ASSE_GENE / NUME_ORDRE
Opérande FONC_MULT / COEF_MULT
Mot clé EXCIT_RESU
Mot-clé RESULTAT
Opérande COEF_MULT
Cas particulier de l’analyse sismique
Prise en compte du multi-appuis : mots clés MODE_STAT, MULTI_APPUI et ACCE, VITE,
Dans le cas d'une structure multi-appuis, pour reproduire les grandeurs calculées dans le repère absolu ou pour prendre en compte des non-linéarités localisées, il est nécessaire de calculer la réponse généralisée en tenant compte de la composante d'apprentissage Mots-clés MODE_STAT, MULT_APPUI, ACCE, VITE, DEPL, DIRECTION et GROUP_NO) spécifiques pour tenir compte du caractère multi-supporté doivent être présents simultanément. Un cham_no, issu de la projection d'un CALC_CHAR_SEISME, représente le vecteur excitation sur le support. Il ne faut pas l'oublier, même si l'information peut paraître redondante avec les données du support et la direction du séisme.
Concept de type Mode_meca produit par la commande MODE_STATIQUE [U4.52.14] correspondant à (3 sur 6) nb_supports modes statiques (où nb_supports est le nombre d'appuis subissant des accélérations différentes). Lorsqu'on calcule la réponse sismique d'un ouvrage multi-supports, MULT_APPUI = 'OUI', on compare à tout instant le vecteur des déplacements absolus de chacun des points de choc considérés, pour déterminer s'il y a choc et calculer la valeur correspondante forces de choc. Sinon, MULT_APPUI = 'NON', à chaque instant on compare le vecteur de déplacements relatifs de chacun des nœuds susceptibles de provoquer un choc.
Noms des fonctions d'accélération (AVEC), de vitesse (VITE) et de déplacement (DEEPL) imposées lors du calcul de la réponse sismique des structures à supports multiples.
Prise en compte d'un transitoire de vitesse de rotation
Opérande VITESSE_VARIABLE
Opérandes VITE_ROTA, MATR_GYRO, ACCE_ROTA et MATR_RIGY
Si ACCE_ROTA n'est pas précisé, il est négligé (c'est à dire pas de dérivation numérique de VITE_ROTA. Si VITESSE_VARIABLE = 'NON', il faut renseigner la valeur de la vitesse de rotation constante.
Mot clé VERI_CHOC
Mot clé COMPORTEMENT
- Non linéarités localisées de type choc et frottement : DIS_CHOC
- Opérande INTITULE
- Opérandes GROUP_NO_1 / GROUP_NO_2 . / GROUP_MA
- Opérande OBSTACLE
- Opérande NORM_OBST
- Opérande ORIG_OBST
- Opérande JEU
- Opérande ANGL_VRIL
- Opérandes DIST_1 / DIST_2
- Opérandes SOUS_STRUC_1 / SOUS_STRUC_2
- Opérande REPERE
- Opérande RIGI_NOR
- Opérande AMOR_NOR
- Opérande RIGI_TAN
- Opérande AMOR_TAN
- Opérande FROTTEMENT
- Opérande UNIDIRECTIONNEL
- Non linéarités localisées de rotor fissuré : ROTOR_FISS
- Non-linéarité localisée : ANTI_SISM
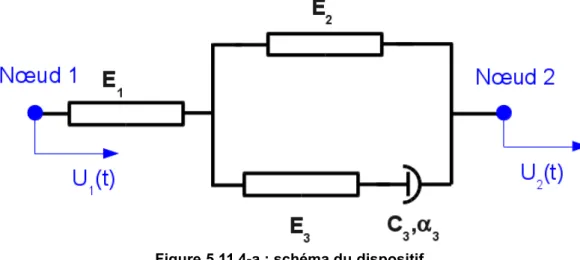
- Non-linéarité : DIS_VISC
- Syntaxe
- Opérandes liés à la position du dispositif
- Opérandes liés au comportement
- Opérandes liés à la convergence du comportement du dispositif
- Non-linéarité : DIS_ECRO_TRAC
- Syntaxe
- Opérandes liés à la position du dispositif
- Opérandes liés au comportement
- Opérandes liés à la convergence du comportement du dispositif
- Non-linéarité : FLAMBAGE
- Non-linéarité : RELA_EFFO_DEPL
- Opérande GROUP_NO
- Opérande SOUS_STRUC
- Opérande NOM_CMP
- Opérande FONCTION
- Non-linéarité : RELA_EFFO_VITE
Nom du groupe de nœuds de la structure auquel la condition de non-linéarité s'applique. Le nom du groupe de nœuds de la deuxième structure auquel la condition de non-linéarité s'applique. Il est recommandé que Xloc soit la direction de la fibre neutre ou génératrice de la structure étudiée.
La position de l'obstacle dans ce plan est obtenue par une rotation d'angle autour de la direction normale Xloc (cf. [Figure 3.6.1.7-a]). Nom de la sous-structure qui contient le nœud de choc qui renseigne le mot-clé GROUP_NO_1. Nom de la sous-structure contenant le nœud de choc qui renseigne le mot-clé GROUP_NO_2.
Le comportement de la fissure est donné par la loi de rigidité de la fissure et sa dérivée. Lors du calcul de la base modale réduite, il peut être judicieux de définir un élément ayant une raideur élastique correspondant à la tangente au comportement du dispositif [R5.03.17]. Le nom des groupes de nœuds de la structure entre lesquels le dispositif non linéaire est placé.
La raideur normale de choc après flambement k2 diffère de la raideur avant flambage kn.

Mot clé ARCHIVAGE
- Opérande LIST_INST/INST
- Opérande PAS_ARCH
- Opérande CRITERE
- Opérande PRECISION
La phase non linéaire du post-traitement correspond à l'intervalle de temps où la relation non linéaire était non nulle. Cette relation permet de définir une relation force-vitesse sur un degré de liberté d'un nœud donné sous la forme d'une fonction non linéaire. Les opérandes GROUP_NO, SOUS_STRUC, NOM_CMP et FONCTION ont la même signification pour les relations RELA_EFFO_DEPL et RELA_EFFO_VITE.
Liste d'entiers définissant les instants de calcul pour lesquels la solution doit être archivée dans le concept résultat tran_gene. Instants de calcul pour lesquels la solution doit être archivée dans le concept tran_noresult. Entier définissant la périodicité d'archivage de la solution de calcul des transitoires dans le concept tran_noresult.
Quelle que soit l'option d'archivage sélectionnée, le premier et le dernier pas de temps ainsi que tous les champs associés sont archivés pour permettre une éventuelle récupération.
Opérande INFO
Opérande IMPRESSION
Opérandes TOUT / NIVEAU
Opérandes INST_INIT / INST_FIN
Opérande UNITE_DIS_VISC
Phase de contrôle
Vérification sur les matrices
Vérification et conseil sur le choix du pas de temps pour les schémas DIFF_CENTRE,
Phase d'exécution pour les schémas adaptatifs
Les diagrammes ADAPT_ORDRE1/2 (différences centrées) ne récupèrent pas avec précision les pulsations spécifiques d'un système, conduisant à des erreurs de calcul importantes dans les deux cas suivants. Le pas de temps peut être restitué par l'opérateur RECU_FONCTION, avec la syntaxe suivante : step = RECU_FONCTION (. RESU_GENE = dynamoda NOM_CHAM = 'PTEM').
Prise en compte des effets d’interaction fluide-structure
Calcul des oscillations d'un système à très faible amortissement (ξ< 10−3) excité à une fréquence de résonance. DEFI_FONCTION [U4.31.02]) et Fi sont des vecteurs ajustés résultant des charges en force imposée (cf. AFFE_CHAR_MECA [U ils peuvent être fournis directement sous forme de vecteurs ajustés ou sous forme de charges à ajuster dans l'algorithme.
Solution
Opérande MODELE
Opérande CHAM_MATER
Opérande CARA_ELEM
Matrices du système
Ceci s'applique également à une matrice d'amortissement construite comme une combinaison linéaire des matrices de rigidité et de masse par la méthode de Rayleigh : utiliser la matrice de la matrice de masse complète pour construire la matrice d'amortissement et la diagonale de la matrice de masse (schémas explicites tels que DIFF_CENTRE ou ADAPT ) pour l’intégration temporelle peut conduire à une instabilité numérique.
Schémas d’intégration. Mot clé SCHEMA_TEMPS
Opérande SCHEMA
Mot-clé ETAT_INIT
- Opérandes RESULTAT
- Opérandes DEPL/ VITE/ACCE
- Opérandes NUME_ORDRE/ INST_INIT
- Opérande CRITERE
- Opérande PRECISION
Pour les schémas d'ordre supérieur (NEWMARK ou WILSON), l'accélération initiale (acce_init) joue un rôle important dans l'initialisation du schéma. Notion de type dyna_trans issue d'un précédent calcul avec DYNA_LINE_TRAN et définit les conditions initiales du nouveau calcul. Si le mot-clé est présent, on utilise le champ d'accélération d'entrée pour initialiser les différents schémas d'intégration temporelle selon les algorithmes décrits dans le document [R5.05.02].
Lorsque l'état initial du système dynamique est défini par des champs DEPL, VITE et/ou ACCE, les composantes de ces champs qui n'ont pas été explicitement saisies lors de la création des champs sont considérées comme nulles lors du calcul de dynamique transitoire. Instantané du calcul précédent à extraire et prendre comme état initial en cas de redémarrage. En l'absence de NUME_ORDRE et INST_INIT, le temps de reprise est pris égal au dernier temps de calcul précédemment archivé.
Mot-clé EXCIT
Opérandes VECT_ASSE / CHARGE
Opérande FONC_MULT
Opérandes MULTI_APPUI / ACCE / VITE / DEPL / DIRECTION / GROUP_NO /
Mot clé EXCIT_RESU
Mot-clé AMOR_MODAL
Opérandes MODE_MECA / AMOR_REDUIT / NB_MODE
Mot-clé ENERGIE
Mot-clé INCREMENT
Opérandes LIST_INST / PAS
Opérandes INST_INIT / INST_FIN / NUME_FIN
Opérandes VITE_MIN / COEF_MULT_PAS / COEF_DIV_PAS / PAS_LIMI_RELA /
Lorsque le dénominateur de la fréquence apparente xn− xn−1 devient faible, la fréquence apparente peut devenir très élevée, conduisant à un raffinement excessif du pas de temps. Le coefficient d'amélioration du pas de temps (1) lorsque l'erreur est supérieure à 1, le nombre maximum d'itérations (NMAX_ITER_PAS) n'est pas atteint, et le pas de temps minimum n'est pas atteint. Coefficient utilisé au pas de temps initial pour déterminer la limite de raffinement et donc le plus petit pas de temps.
Nombre maximum de réductions du pas de temps par pas de calcul : si erreur1et Niter Nitermax : tn= cdp∗ tn. Si l'utilisateur ne fournit pas de valeur à ce paramètre optionnel, le code calculera le pas de temps minimum à partir de PAS_LIMI_RELA.
Mot-clé ARCHIVAGE
- Opérandes LIST_INST/INST
- Opérande PAS_ARCH
- Opérande CRITERE
- Opérande PRECISION
- Opérande CHAM_EXCLU
Cette exclusion est ignorée pour le moment final du calcul : les trois champs sont nécessaires à une POURSUITE.
Phase de contrôle
Dans le cas de l'amortissement hystérétique, nous disposons d'une matrice de rigidité complexe et résolvons l'équation suivante.
Opérande RESULTAT
Opérande MODELE
Opérande CHAM_MATER
Opérande CARA_ELEM
Opérande MATR_MASS
Opérande MATR_RIGI
Opérande MATR_AMOR
Mot-clé AMOR_MODAL
Opérandes AMOR_REDUIT / LIST_AMOR
Opérande MATR_IMPE_PHI
Opérandes FREQ/LIST_FREQ
Opérandes TOUT_CHAM / NOM_CHAM
Mot clé EXCIT
- Opérandes VECT_ASSE/VECT_ASSE_GENE/CHARGE
- Opérandes FONC_MULT_C / COEF_MULT_C / FONC_MULT / COEF_MULT
- Opérande PUIS_PULS
- Opérande PHAS_DEG
- Remarque
Soit en indiquant un vecteur composite correspondant à une charge, soit par charges qui conduiront au calcul et à la mise en place d'un deuxième élément. Permet de définir g P discrétisation spatiale de la charge, sous forme d'un champ aux nœuds correspondant à une ou plusieurs forces charges ou mouvement imposé. Permet de définir la loi d'évolution, complexe ou réelle, de la fréquence, appliquée à toutes les composantes du champ dans le nœud associé à cet événement.
Permet de définir la puissance de la pulsation lorsque la charge est fonction de la fréquence ; par défaut ni= 0. Permet de définir la phase de chaque composante de l'excitation en degrés par rapport à une référence monophasée ; par défaut i= 0.
Opérande EXCIT_RESU
Opérande RESULTAT
Opérande COEF_MULT_C
Opérande INFO