Relations de comportement non linéaires (des éléments discrets)
Les paramètres nécessaires à ces relations sont fournis dans l'opérateur DEFI_MATERIAU par les mots-clés. Contrairement aux modèles de comportement 1D [bib3], ces relations relient directement forces et déplacements, plutôt que d'être formulées entre contraintes et déformations. Nous décrivons pour chaque relation comportementale le calcul du champ de force à partir d'un incrément de déplacement donné (voir l'algorithme de Newton [R5.03.01]), le calcul des forces nodales R et la matrice tangente.
Calcul des déformations (petites déformations)
Calcul des efforts et des forces nodales
Notations générales
Équations du modèle DIS_GOUJ2E_PLAS
Intégration de la relation DIS_GOUJ2E_PLAS
Variables internes
Définition
Variables internes
Définition
Intégration du comportement
Dans le cas où l'écrouissage cinématique est linéaire, (seul cas thermodynamiquement justifié [bib 8], on obtient analytiquement la solution :Fe Ke k =∣Ke U F-− X -∣.
Variables internes
Définition
Formulation du comportement
Les cycles suivants sont observés dans le plan vitesse de déformation-contrainte dans le modèle rhéologique pour différentes valeurs de . La pente des cycles provient de l'effet de raideurs parallèles dans le comportement rhéologique (Kelvin-Voigt ou Zener) ou en série (modèle de Maxwell). En effet, dans le cas d'un amortisseur unique sans raideur, les cycles sont nécessairement symétriques par rapport à l'axe des déplacements nuls.
Si l'on dispose de courbes expérimentales du comportement d'un tel dispositif amortisseur, on peut déterminer par recalage les différents coefficients de cette loi DIS_VISC.
Mise en données
Intégration du comportement
Dans le cas =1 (amortisseur linéaire) on retrouve la matrice tangente K et la dépendance habituelle au pas de temps t du schéma de Newmark pour le cas linéaire, cf. Dans le cas ≠1 (amortisseur non linéaire) on voit que vi et ai ensemble ne peuvent pas être nuls (sauf en statique), la matrice tangente K du diagramme de Newmark voit sa dépendance au pas de temps affectée par le facteur C. Donc si on fait varier le coefficient C de la loi, il va falloir faire varier le pas de temps d’intégration temporelle.
Ce modèle de comportement d'éléments discrets est disponible indifféremment au sein des opérateurs DYNA_VIBRA [U4.53.03] et DYNA_TRAN_MODAL [U4.53.21], pour l'analyse dynamique modale avec non-linéarités nodales et schémas d'intégration temporelle de type Euler ou Runge-Kutta d'ordre de type dynamique. 5 et ordre 3, à pas réglable. Comme pour la dynamique basée sur la physique, il faut déterminer le pas de temps du diagramme selon les paramètres de la loi DIS_VISC, dont les valeurs sont définies directement dans les opérateurs DYNA_VIBRA et DYNA_TRAN_MODAL.
Variables internes
Définition
Mise en données
Formulation du comportement
Intégration locale du comportement
Variables internes
Le comportement DIS_CHOC reflète le contact avec choc et frottement entre deux structures, via deux types de relations.
Relation de contact unilatéral
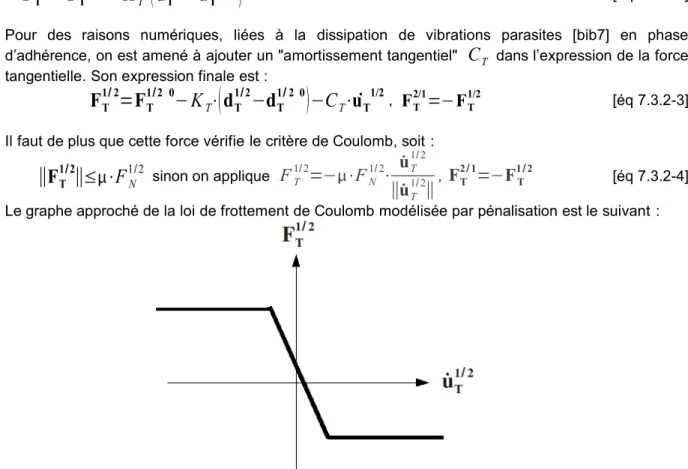
Pour les développements actuels nous utiliserons une relation simple : la loi de frottement de Coulomb.
Loi de frottement de Coulomb
Modélisation approchée des relations de contact par pénalisation
Le graphe de F doit faire face au graphe de Coulomb lorsque est face à zéro [bib6]. Pour des raisons numériques, liées à la propagation des vibrations parasites [bib7] en phase d'adhésion, nous sommes amenés à ajouter un "amortissement tangentiel" CT dans l'expression de la force tangentielle. Le graphique approximatif de la loi de frottement de Coulomb modélisée par pénalité est le suivant.
Définition des paramètres de contact
Le comportement DIS_GRICRA permet de modéliser le comportement en translation et en rotation des ressorts de liaison maille et tige des éléments combustibles.
Présentation générale
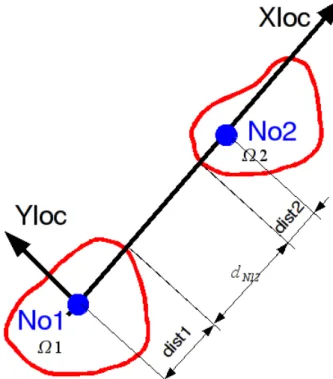
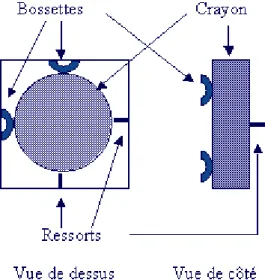
Les équations de la loi de comportement sont écrites dans le référentiel local discret. Compte tenu de la nature orthotrope du comportement dans les directions tangentielles au discret, nous adoptons la convention suivante pour définir le repère local du discret : l'axe des x représente l'axe du discret, l'axe des y correspond à la direction du discret. crayon, et l'axe z est l'axe orthogonal à x et y. Pour les angles de rotation, on notera l'angle de rotation autour de l'axe x (DRX) et l'angle de rotation autour de l'axe z (DRZ).
Nous ne sommes pas intéressés par l'angle de rotation autour de y (DRY) car nous devons bloquer cette rotation (état limite) dans le fichier de commandes. On considère un comportement élastique, avec une force initiale à déplacement nul égale à l'opposé de la force de pincement (la force exercée par le crayon sur le discret comprime le discret). L'étude de la liaison grille-crayon tournante avec le système bosse-ressort a montré que le comportement pouvait être décrit en superposant deux comportements simples.
Si l'on considère une rotation d'un angle dans le repère global correspondant au repère local des discrets 1 et 2, cet angle correspond à l'angle des discrets 3 et 4. Il suffit alors d'établir la loi élastoplastique en discret l'angle (du repère local) et la loi élastique bilinéaire à l'angle (du repère local) pour avoir un recouvrement des deux comportements grâce au système d'intersections discrètes. Le moment s'exprime en fonction de l'angle et d'un angle « plastique » ou angle de glissement.
On se référera au document [R5.03.09] sur l'intégration de lois non linéaires 1D pour l'intégration numérique de cette loi élastoplastique de type Von Mises avec écrouissage isotrope, où la force est remplacée par le moment et la déformation par la différence d'angle. . Quant à la rotation autour de l'axe y, il faut absolument bloquer cette rotation, car aucune loi n'a été identifiée pour ce degré de liberté : le crayon ne tourne pas. Cependant, pour limiter le mauvais conditionnement de la matrice de rigidité, une raideur est introduite dans le code, issue des autres raideurs en rotation.
Le comportement en rotation nécessite la saisie de 5 paramètres, soit sous forme de constantes (ANG1, ANG2, PEN1, PEN2, PEN3), soit sous forme de fonctions de température et de rayonnement (ANG1_FO, ANG2_FO, PEN1_FO, PEN2_FO, PEN3_FO). A partir de l'angle ANG1 (ou ANG1_FO), le phénomène de glissement dans les discrets orthogonaux au plan de rotation est activé, donc ces éléments ne participent plus à la raideur en rotation et la pente diminue et devient PEN2 (ou PEN2_FO). Sous l'angle ANG2 (ou ANG2_FO), il y a toujours du glissement, auquel s'ajoute l'écartement du crayon par rapport aux bossages donnés, entraînant la réduction de raideur.

Remarque
Utilisation
Un certain nombre de paramètres supplémentaires, disponibles pour ce comportement mais introuvables dans ce document, sont expliqués dans [V6.04.131]. Les paramètres de dépendance en température et en rayonnement de la force de serrage sont définis dans le document [V6.02.131].
Définition
Si l'on est en décharge Uy/ Uy 0 , on détermine si l'on est sur la courbe élastique ou limite, en fonction de la valeur de la variable interne V1 à l'étape précédente.
Variables internes