ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN
Desarrollo de una metodología empleada a la solución de
prácticas virtuales de procesos secuenciales electroneumáticos
TESIS
CON LA FINALIDAD DE OBTENER EL TÍTULO DE:
INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN
PRESENTAN:
López Saldaña Alejandro. Rivera Cerón Karen Liliana. Zamora Hernández José Manuel.
DIRECTORES DE TESIS
ÍNDICE
ÍNDICE ... III
ÍNDICE DE FIGURAS ... VII
ABREVIATURAS ... XI
GLOSARIO ... XII
OBJETIVO ... XIII
OBJETIVOS PARTICULARES ... XIV
INTRODUCCIÓN ... XV
CAPÍTULO 1. Descripción del Trabajo ... 2
1.1 Ubicación Geográfica del Proyecto ... 2
1.2 Antecedentes Historicos del Problema ... 2
1.3 Planteamiento del Problema ... 3
1.4 Justificación ... 4
CAPÍTULO 2. Marco Referencial ... 7
2.1 Neumática. ... 7
2.1.1 Líneas de Fluido. ... 9
2.1.2 Equipos de Línea. ... 10
2.1.3 Actuadores ... 12
2.1.4 Distribuidores o Direccionales ... 13
2.1.5. Mecanismos de Accionamiento ... 17
2.1.6. Método de Solución de Secuencias Electroneumáticas ... 17
2.2 Simuladores Digitales de Procesos Neumáticos ... 20
2.3.2 RSLogix 5000 ... 32
2.4 Comunicación ... 32
2.4.1 RSLinx Classic ... 33
2.4.2 OPC Server ... 35
2.5 RSLogix Emulate 5000 ... 38
CAPÍTULO 3. Software ... 39
3.1 Entorno a FESTO FluidSIM ... 39
3.2 Entorno a RSLogix 5000 ... 43
3.2.1 Programación ... 44
3.2.2 Lenguajes de Programación ... 51
3.3 Configuración del Emulador ... 64
3.4 Comunicación ... 65
3.4.1 Aplicación de RSLinx Classic Gateway ... 65
3.4.2 Aplicación de OPC Server ... 67
CAPÍTULO 4. Metodología ... 71
4.1 Planteamiento de Metodología ... 72
4.1.1 Paso 1. Problemática... 74
4.1.2 Paso2. Análisis de la Problemática ... 74
4.1.3 Paso 3. Diseño de la solución Electroneumática en FESTO FluidSIM... 76
4.1.4 Paso 4. Diseño de Solución del Controlador de Automatización Programable .. 77
4.1.5 Paso 5. Interconexión (Comunicación) entre Software FESTO FluidSIM, RSLogix 5000 y RSLogix Emulate 5000 ... 78
4.1.6 Paso 6. Emulación ... 78
4.1.7 Paso 7. Análisis y Evaluación ... 79
4.1.9 Paso 9. Conclusiones. ... 80
CAPÍTULO 5. Aplicación de la Metodología ... 81
5.1 Práctica 1. Decoradora de Pastel. (Programación en Escalera.) ... 81
Paso 1. Problemática ... 81
Paso 2 Análisis del Problema ... 82
Paso 3. Diseño de la Solución Electroneumática en FESTO FluidSIM. ... 83
Paso 4. Diseño de la Solución del Controlador de Automatización Programable. ... 84
Paso 5. Interconexión entre software, FESTO FluidSIM, RSLogix 5000 y RS Emulate 5000. ... 87
Paso 6. Análisis y Pruebas. ... 88
Paso 7. Documentación ... 90
Paso 8. Conclusiones ... 90
5.2 Práctica 2. Sistema de Doblado y Conteo. (Programación en Diagramas de Bloques de Funciones) ... 91
Paso 1. Problemática ... 91
Paso 2 Análisis del Problema ... 91
Paso 3. Diseño de la Solución Electroneumática en FESTO FluidSIM ... 93
Paso 4. Diseño de la Solución del Controlador de Automatización Programable. ... 94
Paso 5. Interconexión entre software, FESTO FluidSIM, RSLogix 5000 y RS Emulate 5000. ... 99
Paso 6. Análisis y Pruebas. ... 100
Paso 7. Documentación ... 102
Paso 8. Conclusiones. ... 102
5.3 Practica 3 Manipulador Neumático. (Programación en Lenguaje de Diagrama de Funciones Secuenciales, SFC). ... 103
Paso 2. Análisis del Problema ... 103
Paso 3. Diseño de la Solución Electroneumática en FESTO FluidSIM. ... 105
Paso 4. Diseño de la Solución del Controlador de Automatización Programable. ... 106
Paso 5. Interconexión entre software, FESTO FluidSIM, RSLogix 5000 y RS Emulate 5000 ... 108
Paso 6. Análisis y Pruebas ... 109
Paso 7. Documentación. ... 111
Paso 8. Conclusiones. ... 112
CONCLUSIONES ... 113
RECOMENDACIONES ... 114
BIBLIOGRAFÍA ... 115
ÍNDICE DE FIGURAS
Figura 1.1. Ubicación Geográfica del Proyecto... 2
Figura 2.2. Aplicación de la Neumática. ... 8
Figura 2.3. Estructura de un Sistema Neumático. [2] ... 9
Figura 2.4. Líneas de Fluido (Símbolos ISO-CETOP). ... 10
Figura 2.5. Equipos de Línea (Símbolos ISO-CETOP). ... 10
Figura 2.6. Componentes de la Unidad de Mantenimiento. ... 11
Figura 2.7. Funcionamiento (Izquierda) y Elemento Físico (Derecha) de la Unidad de Mantenimiento. [4] ... 12
Figura 2.8. Actuadores (Símbolos ISO-CETOP). ... 12
Figura 2.9. Funcionamiento de un Cilindro de Doble Efecto. ... 13
Figura 2.10. Elemento Físico de un Cilindro de Doble Efecto. [4] ... 13
Figura 2.11. Distribuidores (Símbolos ISO-CETOP)... 14
Figura 2.12. Válvula 5/2 vías. ... 14
Figura 2.13. Válvula 5/2 Vías Accionada. ... 15
Figura 2.14. Válvula 5/3 Vías. Posición Estable Intermedia. ... 15
Figura 2.15. Válvula 5/3 Vías. Señal de Pilotaje Aplicada. ... 16
Figura 2.16. Válvula 5/3 Vías. Después de aplicar la Señal de Pilotaje. ... 16
Figura 2.17. Válvulas. Elemento Físico. [4]... 16
Figura 2.18. Mecanismos de Accionamiento (Símbolos ISO-CETOP). ... 17
Figura 2.19. Diagrama Fase-Estado. ... 18
Figura 2.20. Ecuación de Movimientos con Etapas, Acciones, Transiciones... 18
Figura 2.21. Diagrama de Fuerza. ... 19
Figura 2.22. Diagrama de Control. ... 19
Figura 2.23. Pantalla Principal de FESTO FluidSIM. ... 21
Figura 2.24. Controlador de Automatización Programable... 23
Figura 2.25. Arquitectura de un PAC. ... 23
Figura 2.26. Programación en Escalera. (Arranque y Paro). ... 27
Figura 2.27. Programación en Diagrama de Bloques de Funciones (Arranque y Paro). ... 28
Figura 2.28. Elementos de una Programación en Bloques. ... 29
Figura 2.29. Diagrama en Funciones Secuenciales. ... 30
Figura 2.31. Enlace de RSLinx con diferentes Dispositivos. ... 33
Figura 2.32. Servidor OPC del Software RSLinx. ... 36
Figura 2.33. Estructura OPC Server. ... 37
Figura 2.34. RSLogix Emulate 5000. ... 39
Figura 3.35. Pantalla Principal de FESTO FluidSIM. ... 40
Figura 3.36. Inserción de Componentes. ... 41
Figura 3.37. Parámetros a Editar. ... 41
Figura 3.38. Conexión de Componentes. ... 42
Figura 3.39. Simulación en FluidSIM. ... 42
Figura 3.40. Parámetros de Configuración para la creación de un Nuevo Proyecto. ... 45
Figura 3.41. Módulo Genérico. ... 46
Figura 3.42. Parámetros, Matrices. ... 47
Figura 3.43. Intervalo entre Paquetes Solicitados. ... 47
Figura 3.44. Selección de Módulos de E/S. ... 48
Figura 3.45. Módulos de E/S. ... 48
Figura 3.46. Monitoreo y Edición de Tags. ... 49
Figura 3.47. Nuevo Tag... 50
Figura 3.48. Parámetros a Configurar. ... 50
Figura 3.49. Selección de un Tag ya Existente. ... 51
Figura 3.50. Creación de Tags desde el Organizador de Controlador. ... 51
Figura 3.51. Visualización de la Ventana de Programación. ... 52
Figura 3.52. Instrucciones Básicas. ... 53
Figura 3.53. Inserción de Componentes. ... 53
Figura 3.54. Inserción de una Bifurcación. ... 54
Figura 3.55. Inserción de un Elemento en una Bifurcación. ... 54
Figura 3.56. Hojas 1, 2 y 3 respectivamente. Control de Motores con un botón de Arranque. ... 55
Figura 3.57. Hoja de Trabajo. ... 55
Figura 3.58. Cambio y Edición de la Hoja de Trabajo. ... 56
Figura 3.59. Añadir una hoja. ... 56
Figura 3.60. Elementos Básicos. ... 56
Figura 3.61. Elementos Arrastrados. ... 57
Figura 3.62. Elemento Agregado. ... 57
Figura 3.63. Agregar o quitar Parámetros ... 58
Figura 3.64. Borrar Ping. ... 58
Figura 3.66. Estructura de una Programación en Bloques. ... 59
Figura 3.67. Creación de Nueva Rutina. ... 60
Figura 3.68. Conversión de Subrutina a Rutina Principal... 61
Figura 3.69. Espacio de Trabajo. ... 61
Figura 3.70. Barra de Lenguaje de Elementos. ... 61
Figura 3.71. Agregar Módulo Emulador. ... 64
Figura 3.72. Módulo Emulador. ... 64
Figura 3.73. Configuración de Parámetros. ... 65
Figura 3.74. Módulo de E/S. ... 65
Figura 3.75. RSLinx. ... 66
Figura 3.76. Controlador Virtual. ... 66
Figura 3.77. Controlador en Funcionamiento. ... 66
Figura 3.78. Comunicación entre RSLogix... 67
Figura 3.79. Tópico en RSLinx. ... 68
Figura 3.80. Aplicar Tópico. ... 68
Figura 3.81. Configuración en FluidSIM. ... 69
Figura 3.82. Configuración de Parámetros en FluidSIM. ... 69
Figura 4.83.Diagrama de Bloques del Planteamiento de la Metodología. ... 73
Figura 4.84. Secuencia. ... 74
Figura 4.85. Diagrama Fase-Estado. ... 75
Figura 4.86. Bosquejo de Diagramas de Fuerza y Control. ... 75
Figura 4.87. Salidas y Entradas de FESTO FluidSIM. ... 76
Figura 4.88. Diseño de Solución del PAC. ... 77
Figura 4.89. Interconexión de Software... 78
Figura 5.90. Esquema Físico. Decoradora de Pastel. ... 81
Figura 5.91. Diagrama de Fase-Estado, Decoradora de Pastel. ... 82
Figura 5.92. Ecuación de Movimientos. ... 82
Figura 5.93. Solución Electroneumática FESTO FluidSIM. ... 84
Figura 5.94. Programación en Escalera. ... 87
Figura 5.95. Interconexión entre Software. ... 88
Figura 5.96. Análisis y Pruebas. ... 89
Figura 5.97. Comparación de Diagramas Fase-Estado: 1. FESTO FluidSIM 2. Diagrama Desarrollado. ... 89
Figura 5.98. Documentación. ... 90
Figura 5.99. Esquema Físico de Doblado y Conteo. ... 91
Figura 5.101. Ecuación de Movimientos. ... 92
Figura 5.102. Solución Electroneumática FESTO FluidSIM. ... 94
Figura 5.103. Programación Bloques de Funciones (Etapas 1- 6)... 98
Figura 5.104. Sistema de Mando para las Electroválvulas Solenoides. ... 98
Figura 5.105. Temporizador y Contador. ... 99
Figura 5.106. Interconexión de Software... 100
Figura 5.107. Prueba y Análisis... 101
Figura 5.108. Comparación de Diagramas Fase-Estado. ... 101
Figura 5.109. Documentación. ... 102
Figura 5.110. Esquema Físico, Manipulador Neumático. ... 103
Figura 5.111. Diagrama Fase-Estado Manipulador Neumático. ... 104
Figura 5.112. Ecuación de Movimientos ... 104
Figura 5.113. Solución Electroneumática FESTO FluidSIM. ... 106
Figura 5.114. Programación en Diagrama de Funciones Secuenciales. ... 108
Figura 5.115. Interconexión de Software... 109
Figura 5.116. Análisis y Pruebas. ... 110
Figura 5.117. Comparación de Diagramas Fase-Estado. 1. FluidSIM. 2. Diagrama Desarrollado. ... 111
ABREVIATURAS
CPU Unidad Central de Procesamiento (Central Processing Unit)
DAQ Adquisición de Datos (Data Acquisition)
DCS Sistema de Control Distribuido (Distributed Control System)
DDE Intercambio Dinamico de Datos (Dynamic Data Exchange)
HID Dispositivo de Interfaz Humana (Human Interface Device)
IP Protocolo de Internet (Internet Protocol)
OLE Incrustación y Enlazado de Objetos (Object Linking and Embedding)
OPC OLE para Control de Procesos (OLE for Process Control)
PAC Controladores de Automatización Programable (Programmable Automation
Controller)
PC Computadora Personal (Personal Computer)
PLC Controlador Lógico Programable (Programmable Logic Controller)
Profibus Proceso de Bus de Campo (Process Field BUS)
RCP Prototipaje Rápido de Controladores
SMTP Protocolo Simple de Transferencia de Correo (Simple Mail Transfer
Protocol)
SLC Celda de nivel individual (Single Level Cell)
SQL Lenguaje de Consulta Estructurado (Structured Query Language)
TCP Protocolo de Control de Transmisión (Transmission Control Protocol)
VB/VBA Aplicaciones para Visual Basic (Visual Basic for Applications)
GLOSARIO
Automatización: Es un sistema donde se trasfieren tareas de producción, realizadas habitualmente por operadores humanos a un conjunto de elementos tecnológicos.
Bit: Es la unidad mínima de información empleada en informática, en cualquier dispositivo
digital, o en la teoría de la información.
Byte: El byte es una unidad compuesta por una agrupación ordenada de 8 bits, es decir, ocho dígitos binarios. Los bits se agrupan de derecha a izquierda tomando como número de bit del 0 al 7. En los controladores de automatización programable, se refiere a la localidad de memoria conformada por 8 bits, en las cuales se aloja una determinada información.
Control: Es el gobierno que se tiene sobre una variable, dentro de un rango de error.
Controlador: Pequeño computador industrial que ha sido altamente especializado para prestar la máxima confianza y máximo rendimiento en un ambiente industrial.
Emulación: Es un software que permite ejecutar programas en una plataforma (sea una arquitectura de hardware o un sistema operativo) diferente de aquella para la cual fueron escritos originalmente.
Módulo: También llamados Interfaces de entradas y salidas. Son los dispositivos que proporcionan los vínculos entre la CPU del controlador y los dispositivos de campo del sistema. A través de ellos se origina el intercambio de información ya sea para la adquisición de datos o la del mando para el control de máquinas del proceso.
Protocolo de Red: El conjunto de normas que regulan la comunicación entre los distintos componentes de una red informática.
Secuencia Electroneumática: Sucesión no interrumpida de etapas, en las que se accionan o activan, actuadores neumáticos.
OBJETIVO
Desarrollar una metodología para la solución de procesos electroneumáticos con el software RSLogix5000 mediante sus diversos lenguajes de programación, realizando una
OBJETIVOS PARTICULARES
1. Desarrollar las secuencias de operación electroneumáticas en FESTO FluidSIM.
2. Desarrollar la programación en RSLogix5000 con lenguaje en escalera, secuencial y
bloques.
3. Realizar la comunicación de RSLogix5000 con el RSLogix Emulate 5000 mediante
RSLinx.
4. Enlazar mediante OPC los software de programación RSLogix5000 y FESTO
INTRODUCCIÓN
En el presente trabajo se muestra el planteamiento de una metodología para la solución de problemas electroneumáticos a través de herramientas de software de simulación, vinculados mediante un servidor OPC.
A continuación se hará una descripción de cada uno de los capítulos.
En el primer capítulo se describen los motivos y justificación para el desarrollo de la metodología, así como la ubicación en donde se propone aplicarla, y una breve reseña sobre las formas en las que se atacará el problema dentro de la institución.
El segundo capítulo desglosa los principales conceptos y principios básicos que se debe tener para llevar a cabo la aplicación de la metodología.
En el tercer capítulo se describen las herramientas de software con las que se plantea la metodología, como lo son: FESTO FluidSIM, RSLogix5000, RSLogix Emulate 5000 y RSLinx, así como su forma de configuración y uso con el fin de proporcionar un conocimiento al lector para su posterior aplicación.
Dentro del capítulo cuatro se describe el planteamiento de la metodología y cada uno de los pasos a seguir para la solución de problemas electroneumáticos, utilizando las herramientas vistas en el capítulo tres.
En el capítulo cinco se demuestra la funcionalidad de la metodología, dando solución a problemas propuestos, observando los resultados obtenidos una vez que se ha aplicado.
CAPÍTULO 1
CAPÍTULO 1. Descripción del Trabajo
En el presente capítulo se explica la ubicación del proyecto, los antecedentes y las necesidades por las que surge la idea de elaborarlo, se justifica el porqué de conjuntar diferentes software tanto de neumática, programación, comunicación y emulación para así realizar una secuencia lógica y visualizar su comportamiento.
1.1 Ubicación Geográfica del Proyecto
El proyecto de tesis será implementado en los laboratorios de pesados 1 de la carrera de Ingeniería en Control y Automatización, ubicados dentro de la unidad profesional Adolfo López Mateos en la Escuela Superior de Ingeniería Mecánica y Eléctrica, unidad Zacateco, ver figura 1.1.
Figura 1.1. Ubicación Geográfica del Proyecto.
1.2 Antecedentes Historicos del Problema
circuitos eléctricos con relevadores, interruptores y otros componentes comúnmente utilizados para el control de los sistemas de lógica combinacional.
El sistema basado en relevadores, tenía un tiempo de vida limitado y se necesitaba un sistema de mantenimiento muy estricto, como revisiones con mayor frecuencia lo que implicaba costos, más personal para realizar el mantenimiento y mayor tiempo para elaborarlo. El proceso para actualizar dichas instalaciones para la industria cambiante año con año era costoso y consumía mucho tiempo. El alambrado de muchos relevadores en un sistema muy grande era muy complicado; si había una falla, la detección del error era muy tediosa y lenta y tenían que ser recableados por electricistas especializados.
El desarrollo de los Controladores Lógicos Programables (PLC) fue dirigido originalmente por los requerimientos de los fabricantes de automóviles que estaban cambiando constantemente los sistemas de control en sus líneas de producción para acomodarlos a sus nuevos modelos de carros, de esta manera se hizo eficiente la producción, mantenimiento, desarrollo de la programación.
En la actualidad, siguiendo la evolución de este tipo de sistemas se llegó a los PAC.
Los Controladores de Automatización Programables (PAC), son dispositivos que se han colocado recientemente en el mercado industrial, ya que las industrias han ido emigrando a estas nuevas tecnologías anteriormente utilizadas por los Controladores Lógicos Programables (PLC), y es por esto mismo que existe una limitada información en la metodología de programación y vinculación con cualquier tipo de proceso. Así mismo la electroneumática es una herramienta con múltiples aplicaciones industriales. Estas dos tecnologías, en conjunto, son indispensables para la industria.
1.3 Planteamiento del Problema
de dos semestres. A lo largo de este periodo a los alumnos se les instruye con los temas de neumática y electroneumática así como la resolución de problemas, Para lograr este objetivo, se cuenta con material didáctico de la marca FESTO y BOSCH con más de diez años de antigüedad y dispuesto con equipo básico como son: Cilindros neumáticos, válvulas, electroválvulas entre otros.
Si bien se cuenta con este material didáctico, cuando se deseé realizar un proceso electroneumático avanzado (que contenga demasiados elementos) este puede ser insuficiente y complicado por el espacio requerido al elaborarlo.
También se cuenta con programas de simulación, como lo son el Automation Studio, siendo la versión 5 y 3.0.5, las que se encuentran en las aulas de clase. Lamentablemente este software es puramente de simulación, que si bien, puede usarse como una herramienta de diseño, no es utilizada con fines de prácticas aplicadas con otro software u otro dispositivo.
Por otra parte no todos los alumnos tienen la misma capacidad de comprensión, así que dos semestres es muy poco tiempo para entender las diferentes herramientas que se tienen para solucionar problemas electroneumáticos. Ante esto la escuela cuenta con libros de neumática, electroneumática, programación de PLC, pero no posee un acervo bibliográfico que conjunte estas herramientas, otro inconveniente es que se tiene información limitada de los PAC así como su programación con el software RSLogix 5000 dado que son de reciente adquisición.
1.4 Justificación
Las grandes industrias buscan renovarse, en materia tecnológica, optando por utilizar instrumentos de control avanzado como los PAC. La problemática radica en que no cuentan con el personal capacitado para desarrollar u operar estas actividades, y por lo tanto no pueden explotar al máximo las capacidades de sus equipos.
En el mercado existen diversos tipos de Controladores Lógicos Programables, siendo los más usados los de la marca Siemens y Allen Bradley.
Dentro de los laboratorios de la escuela superior de Ingeniería Mecánica y Eléctrica unidad Zacatenco, en la carrera de Control y Automatización se cuenta con PAC Allen Bradley del tipo CompactLogix y ControlLogix de los cuales se tiene información limitada, por lo cual se realiza una aplicación básica de dichos dispositivos, dado que son de reciente adquisición.
CAPÍTULO 2
CAPÍTULO 2. Marco Referencial
En el presente capítulo se explican las bases necesarias para la comprensión del trabajo a desarrollar.
Se abarcan conceptos de dispositivos a manejar durante el trabajo, neumática y electroneumática, una metodología sobre procesos electroneumáticos, la cual se requerirá más adelante. Una comparación importante entre PLC y PAC ya que estos últimos son los que se usaran para realizar el proyecto. Básicamente el desarrollo se hará de manera virtual, sin embargo se debe tener en cuenta que de querer realizarse físicamente el dispositivo a utilizar es un PAC, es por ello que durante este capítulo se hace mención de ellos y sus diferentes lenguajes de programación. Se habla de los software de programación, comunicación y emulación que se emplearan.
2.1 Neumática.
Los términos de neumática y neumático provienen de la palabra griega “Pneuma”, que significa “aliento” o “soplo”. En su acepción original, la neumática se ocupaba de la dinámica del aire y de los fenómenos gaseosos, pero la técnica ha creado de ella un concepto propio, pues en neumática solo se habla de la aplicación de la sobrepresión o la depresión (vacío).
La neumática, ver figura 2.2, se basa en el aprovechamiento de la energía de la sobrepresión, previamente generada, respecto a la presión atmosférica. El portador de la energía es el aire comprimido.
Figura 2.2. Aplicación de la Neumática.
Estructura de los Sistemas Neumáticos
Un sistema neumático es un conjunto de elementos neumáticos enlazados entre sí para realizar una función logrando un objetivo, este debe incluir:
• Flujo de las Señales. De abajo hacia arriba.
• Cadena de Mando. Principio SPA: Sensor, Procesador, Actuador.
Principio EVA: Entrada, Procesamiento, Salida.
• Alimentación de Energía. Por tubo flexible o tubería.
Figura 2.3. Estructura de un Sistema Neumático. [2]
2.1.1 Líneas de Fluido.
Representan la tubería y la dirección en la cual circula el aire comprimido, se representan por medio de líneas perpendiculares. Deben de hacerse el mínimo número de cruces. En estos cruces si no hay conexión no hay señal especial, si hay conexión se señala un punto. El tipo de Línea determina la función que realiza el aire en el circuito.
• Línea continua: Alimentación o Potencia.
• Línea de Trazos: Línea Piloto Auxiliar.
Figura 2.4. Líneas de Fluido (Símbolos ISO-CETOP).
2.1.2 Equipos de Línea.
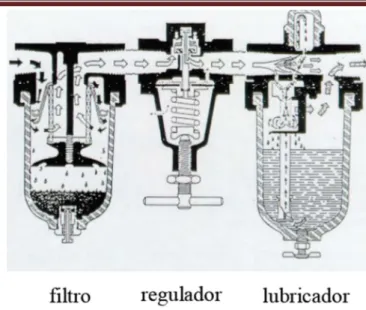
Los filtros y lubricadores, como se muestran en la figura 2.5, se representan por medio de un cuadro, en el que las líneas de paso y conexiones son prolongaciones de su diagonal, en su interior se indican las líneas definitorias de su función concreta.
• Unidad de Mantenimiento.
La unidad de mantenimiento, ver figura 2.6, se compone de un filtro de aire comprimido, con una válvula reguladora de presión y un lubricador.
Figura 2.6. Componentes de la Unidad de Mantenimiento.
Filtro: Tiene como función detener todas las impurezas y el agua condensada del aire
comprimido circulante.
Válvula Reguladora de Presión: Al ingresar el aire a la válvula, su paso es restringido por
el disco que se encuentra en la parte superior. La estrangulación se regula por acción del resorte inferior, como se muestra en la figura anterior. El pasaje de aire reducido determina que la presión en la salida tenga un valor inferior. La presión secundaria a su vez actúa sobre la membrana de manera tal que cuando excede la presión del resorte se dobla y el disco superior baja hasta cerrar totalmente el paso de aire desde el primario. Si el aumento de presión es suficientemente alto, la flexión de la membrana permitirá destapar la perforación central con lo cual el aire tendrá la posibilidad de escapar a la atmósfera, aliviando la presión secundaria. Cuando la presión vuelve a su nivel normal, la acción del resorte nuevamente abre la válvula y la deja en posición normal.
Lubricador: Tiene la misión de lubricar los elementos neumáticos en medida suficiente. El
Figura 2.7. Funcionamiento (Izquierda) y Elemento Físico (Derecha) de la Unidad de Mantenimiento.[4]
2.1.3 Actuadores
• Cilindro de Doble Efecto
Los cilindros de doble efecto, ver figura 2.10, se emplean especialmente en casos en que el émbolo tiene que retornar a su posición inicial.
El vástago de un cilindro de doble efecto se acciona por la aplicación alternativa de aire comprimido en la parte anterior y posterior del cilindro. El movimiento en los extremos es amortiguado por medio de estranguladores regulables. El émbolo del cilindro está provisto de un imán permanente que puede utilizarse para activar un sensor de proximidad (Figura 2.9). [5]
Figura 2.9. Funcionamiento de un Cilindro de Doble Efecto.
Figura 2.10. Elemento Físico de un Cilindro de Doble Efecto. [4]
2.1.4 Distribuidores o Direccionales
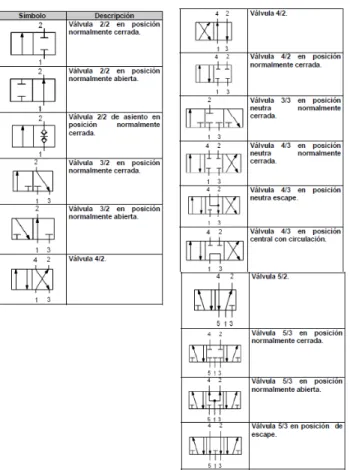
Los distribuidores, como se muestran en la figura 2.11, se representan por rectángulos subdivididos, en los cuales cada porción representa una posición, normalmente se utilizan distribuidores de 2 a 3 posiciones.
• Las conexiones exteriores del distribuidor se representan por trazos laterales en una
sola de las posiciones.
• Las conexiones internas dentro de cada porción se representan mediante líneas con
puntas de flecha en el sentido de la circulación del aire. Si una de las conexiones está cerrada en una posición, se representara mediante un trazo en T.
Las válvulas se clasifican de acuerdo a sus posiciones y vías, a continuación se describirán la válvula 5/2 y 5/3 que son las que se emplearán en este proyecto.
• Válvula 5/2:
Este tipo de válvula se suelen utilizar para gobernar otros mandos aparte.
Como se puede ver en la figura 2.12, la vía T está cerrada. Deja paso de P hacia B, y de A hacia R. Además lleva un drenaje, trazo amarillo. Este sería su estado de reposo.
Figura 2.12. Válvula 5/2 vías.
En la figura 2.12, se observa la misma válvula accionada por el pulsador. Si soltamos el pulsador, el muelle o resorte llevará al émbolo a su estado de reposo. Con la válvula en su
estado de accionamiento, deja la vía R cerrada, el fluido circulará de P hacia A, y de B
hacia T. Esto sucede así porque el fluido que retorna de un cilindro sigue el paso de éstas
vías para accionar otros mandos. [6]
Figura 2.13. Válvula 5/2 Vías Accionada.
• Válvula 5/3:
La válvula tiene en la posición central todas las vías bloqueadas. Cuando se selecciona la posición central con el cilindro en presión, se bloqueará su posición. Puede ser usado para bloquear el cilindro en una posición determinada.
Esta válvula tiene cinco conexiones o vías que son: presión, dos con trabajo y dos con la atmósfera, y puede adoptar tres posiciones. Las vías 14 o Z y 12 o Y, de acuerdo a la norma de simbología ISO y Europea respectivamente, accionan la válvula mediante aire comprimido. En la figura 2.14 se muestra su posición estable central.
La válvula se centra por efecto de los muelles, cuando no se produce ninguno de los pilotajes. En este caso las 5 vías se encuentran cerradas, ver figura 2.15. Seguidamente en la figura 2.16 se muestra la válvula de 5/3 vías después de haber aplicado una señal de pilotaje en 14. El aire fluye de 1 a 4. La conexión 2 se descarga por la 3, mientras que la 5 queda libre. En último lugar aparece la misma válvula después de haber aplicado la señal de pilotaje en 12, 1 se une con 2, 4 con 5 y 3 queda libre. [7]
Figura 2.15. Válvula 5/3 Vías. Señal de Pilotaje Aplicada.
Figura 2.16. Válvula 5/3 Vías. Después de aplicar la Señal de Pilotaje.
Figura 2.17. Válvulas. Elemento Físico. [4]
Identificación de Orificios
En la actualidad existe un acuerdo impulsado por CETOP (Comité Europeo de
Transmisiones Oleo Hidráulicas y Neumáticas) en el cual los orificios se identifican por un
Alimentación o Entrada 1
Utilización (Números Pares) 2,4….
Escapes (Números Impares) 3,5….
Orificios Piloto o Accionamiento 10, 12, 14
2.1.5. Mecanismos de Accionamiento
Las representaciones de estos mecanismos son esquemáticas a la realidad y se coloca a los extremos del distribuidor, una palanca, un pulsador, un rodillo. Un mando de presión se representa por una flecha con el vértice hacia el rectángulo. Un muelle (resorte) se representa por trazos en zig-zag, ver figura 2.17.
Figura 2.18. Mecanismos de Accionamiento (Símbolos ISO-CETOP).
2.1.6. Método de Solución de Secuencias Electroneumáticas
Para la solución de secuencias se requiere de métodos que permitan un mejor y fácil desarrollo, evitando cometer errores frecuentes.
Este método se basa en el método paso a paso con anexos de conocimientos que se fueron adquiriendo a lo largo de las experiencias obtenidas en el desarrollo de secuencias.
En este diagrama se plasman las acciones de los cilindros, en el eje horizontal se presentan las fases y en el vertical los estados.
Figura 2.19. Diagrama Fase-Estado.
Se puede observar en la figura 2.19 que el automatismo se compone de 6 fases. En la fase inicial los dos cilindros están en estado (-); durante la 1 fase el cilindro A pasa de estado (-) al estado (+) y el cilindro B mantiene su estado. En la fase 2 el cilindro A mantiene su estado y el cilindro B pasa de estado (-) al estado (+). En la fase 3 el cilindro A pasad de estado (+) al estado (-) y el cilindro B mantiene su estado, Etc.
Este sistema permite una visión rápida y una asimilación general del ciclo.
Otra manera de analizar la secuencia es con una Ecuación de Movimientos, esta indica lo mismo que el diagrama Fase-Estado, sin embargo, en muchas ocasiones para el usuario es más sencillo de estudiar de una manera gráfica que analítica.
A partir del Diagrama Fase-Estado se obtiene la Ecuación de Movimientos.
Figura 2.20. Ecuación de Movimientos con Etapas, Acciones, Transiciones.
Ecuación de Movimientos: |A+| B+|A-|A+|B-|A-|
En la figura 2.20 se muestra la Ecuación de movimientos en donde:
• Etapa: Muestra el número de etapas con el que cuenta el sistema.
• Transición: Representa los sensores de a proximidad magnéticos de los cilindros, y permiten pasar a la siguiente etapa. BI representa el botón de arranque.
Posteriormente, ya entendidos los pasos y la manera en que la secuencia se comporta, se desarrolla la secuencia con todos los elementos neumáticos, electroneumáticos y eléctricos.
Figura 2.21. Diagrama de Fuerza.
En la figura 2.21 se representa el diagrama de fuerza de la secuencia, donde se aprecian válvulas 5/2 con pilotaje interno, muelle para la retracción, accionamiento por solenoide y botón auxiliar, se tienen dos cilindros neumáticos de doble efecto, interruptores de límite, unidad de mantenimiento y válvulas reguladoras de flujo unidireccional.
Figura 2.22. Diagrama de Control.
En la figura 2.22 se muestra el Diagrama de Control de la secuencia establecida, se establece la lógica para la manipulación del sistema de acuerdo como se desea que se comporte. Se hace uso de relés, contactos, solenoides, interruptores de proximidad, etc.
Cilindros de Doble Efecto
Válvulas 5/2. Válvulas
Reguladoras de Flujo Unidireccional.
Unidad de Mantenimiento
2.2 Simuladores Digitales de Procesos Neumáticos
Los simuladores de Procesos Neumáticos sirven para ver el funcionamiento de componentes neumáticos dentro de un sistema diseñado por el usuario.
Existen diferentes empresas y marcas que desarrollan este tipo de software de simulación como lo son Automation Studio, FESTO FluidSIM, etc.
El software empleado en el siguiente trabajo es de la empresa FESTO, FluidSIM.
FESTO FluidSIM es una herramienta de simulación para la obtención de los conocimientos básicos de la neumática y funciona con el entorno Microsoft Windows. FluidSIM se desarrolló en colaboración con la Universidad de Paderborn, la empresa FESTO Didactic y Art Systems.
Una característica importante de FluidSIM es su estrecha relación con la función y simulación CAD. Posibilita la ejecución sobre la base de descripciones de componentes físicos de una simulación plenamente explicativa. Con esto se establece una división entre la elaboración de un esquema y la simulación de un dispositivo práctico.
Otra característica importante es su completo concepto didáctico: FluidSIM ayuda a aprender, enseñar y visualizar la neumática. Los componentes neumáticos son explicados por medio de breves descripciones, imágenes y presentaciones de principios de accionamiento; los ejercicios y videos didácticos ayudan a conocer las conexiones más importantes para el uso de componentes neumáticos.
Este programa de diseño y simulación, de la firma FESTO, permite comprender los circuitos neumáticos más elementales.
Figura 2.23. Pantalla Principal de FESTO FluidSIM.
2.3 Controladores de Automatización Programable. (PAC)
Anteriormente en la industria se hacía uso del control electromagnético, posteriormente se buscó una solución más eficiente para reemplazar los sistemas de control basados en circuitos eléctricos con relevadores, interruptores y otros componentes comúnmente utilizados para el control de los sistemas de lógica combinacional.
El sistema basado en relevadores, tenía un tiempo de vida limitado y se necesitaba un sistema de mantenimiento muy estricto. El proceso para actualizar dichas instalaciones para la industria cambiante año con año era costoso y consumía mucho tiempo. El alambrado de muchos relevadores en un sistema muy grande era muy complicado; si había una falla, la detección del error era muy tediosa y lenta y tenían que ser recableados por electricistas especializados.
nuevos modelos de carros, de esta manera se hizo eficiente la producción, mantenimiento, desarrollo de la programación.
En la actualidad, siguiendo la evolución de este tipo de sistemas se llegó a los PAC.
Un PAC, ver figura 2.24, es una tecnología industrial orientada al control automatizado, al diseño de prototipos y a la medición. El PAC se refiere al conjunto formado por un controlador (una CPU típicamente), módulos de entradas y salidas, y uno o múltiples buses de datos que lo interconectan todo.
Este controlador combina eficientemente la fiabilidad de control de un autómata (PLC) junto a la flexibilidad de monitorización y cálculo de una PC (Computadora Portátil) (figura 2.25). A veces incluso se le une la velocidad y personalización de la microelectrónica. Los PAC pueden utilizarse en el ámbito investigador (prototipo rápido de controladores o RCP), pero es sobre todo en el industrial, para control de máquinas y procesos, donde más se utiliza. A destacar los siguientes: múltiples lazos cerrados de control independientes, adquisición de datos de precisión, análisis matemático y memoria profunda, monitorización remota, visión artificial, control de movimiento y robótica, seguridad controlada, etc.
Los PAC se comunican usando los protocolos de red abiertos como TCP/IP, OPC (OLE for process control), SMTP, puerto serie (con Modbus por ejemplo), etc, y es compatible con los privados (CAN, Profibus, etc).
Los controladores industriales conocidos como PAC se crearon debido a las necesidades de desarrollo de sistemas de control industrial y control de máquinas.
Figura 2.24. Controlador de Automatización Programable.
Figura 2.25. Arquitectura de un PAC.
2.3.1 Comparación entre PLC y PAC
lógica de escalera. Se pueden encontrar PLC en la mayoría de las industrias en usos que se extienden desde el empaquetado hasta el maquinado y manipulación de materiales.
Comparando a los primeros PLC, que se basaban en CPU de bit-slice y por lo tanto eran solamente capaces de E/S digitales, los modernos PLC hacen uso las tecnologías de microprocesadores más recientes. Esto permite que incorporen características más avanzadas tales como entradas y salidas analógicas, comunicación en red y lenguajes de programación de mayor nivel.
Sin embargo, los ingenieros crean el 80% de las aplicaciones industriales con E/S digitales, unas pocas líneas de E/S analógicas y técnicas de programación simples. Expertos de ARC, VDC y PLCS.net estiman que:
• 80% de los PLC son utilizados en aplicaciones pequeñas (1 a 128 E/S)
• 78% de las E/S de los PLC son digitales
• 80% de los desafíos en las aplicaciones de los PLC se solucionan con un conjunto de 20 instrucciones de lógica de escalera
Los ingenieros que enfrentan la solución de problemas que caen fuera de esas funciones básicas fuerzan con frecuencia los límites de los PLC. En los años 80 y los años 90, estos ingenieros eran los que consideraban las PC para que el control industrial obtenga la flexibilidad ofrecida por el software de alto nivel, personalizado y un hardware más potente. Sin embargo, usar las PC para el control industrial también significa ocuparse de debilidades inherentes tales como estabilidad, confiabilidad y herramientas de programación desconocidas.
Los PAC y los PLC poseen varias cosas en común: internamente ambos incluyen una fuente de energía, una CPU, una base para E/S, módulos y registros de memoria que reflejan los canales individuales de E/S sobre los módulos. No obstante, las diferencias son bastante significativas.
En su estudio denominado "Visión Mundial de los Controladores Lógicos Programables",
ARC identificó cinco principales características de los PAC:
Funcionalidad de dominios múltiples, al menos dos de lógica, movimiento, control PID, manejadores y procesos en una sola plataforma.
Plataforma de desarrollo simple multidisciplinaria, incorporando etiquetado común y una sola base de datos para acceder a todos los parámetros y funciones.
Herramientas de software que permiten el diseño por flujo de proceso a través de diversas máquinas o unidades de procesos, junto con la norma IEC 61131-3, guía del usuario y administración de datos.
Arquitecturas abiertas, modulares, que reflejen las aplicaciones industriales a partir de planos de maquinarias en fábricas a operaciones unitarias en plantas de procesos.
Utilización de normas para interfaces de redes, lenguajes, etc., tales como TCP/IP, OPC y consultas XML y SQL.
La mayoría de los PLC se programan en una representación gráfica de las bobinas y los contactos llamada lógica de escalera. La mayoría de los PAC se programan en un lenguaje de programación modernos, como C o C + +.
La principal diferencia entre un PAC y un sencillo sistema de control basado en PC es que en un PAC, la "caja" que contiene las E/S, también incluye el procesador y el software. De hecho, la CPU en funcionamiento, está integrado en el sistema de E/S en sí. Mientras que un sistema típico, esclavo de adquisición de datos está alojada en algún tipo de PC de uso general completo con el ratón, monitor y otros dispositivos de interfaz humana (HID), un procesador Controlador de Automatización Programable es por lo general dedicado a
Lenguajes de Programación
Los lenguajes de programación son necesarios para la comunicación entre el usuario, sea programador u operario de la máquina o proceso donde se encuentre el PLC y el PLC o PAC. La interacción que tiene el usuario con el controlador la puede realizar por medio de la utilización de un cargador de programa también reconocida como consola de programación o por medio de un PC.
Existen varios lenguajes de programación o sistemas de programación en los autómatas programables; por esto, cada fabricante indica en las características generales de su equipo cuál es el lenguaje o los lenguajes con los que puede operar. En general, se podría decir que los lenguajes de programación más usuales son aquellos que transfieren directamente el esquema de contactos y las ecuaciones lógicas pero, éstos no son los únicos.
Lenguaje de Escalera
La lógica de escalera o ladder, ver figura 2.25, es el lenguaje de programación más usado para la programación de PLC.
Fue el primero con el que se comenzó a programar, de ahí que presente grandes semejanzas con los diagramas eléctricos de escalera utilizados por los técnicos anteriormente a la aparición del autómata.
Este lenguaje está especialmente indicado para facilitar el cambio de un sistema de control realizado con relés por un PLC.
Con este lenguaje se tiene:
• Habilidad de probar mientras se está En-Línea o durante el Tiempo-de-Ejecución.
• Etiquetas de nombres, etiquetas base, Alias, descripción de etiquetas y comentarios
en los escalones los cuales ayudan al ser mostrados en línea.
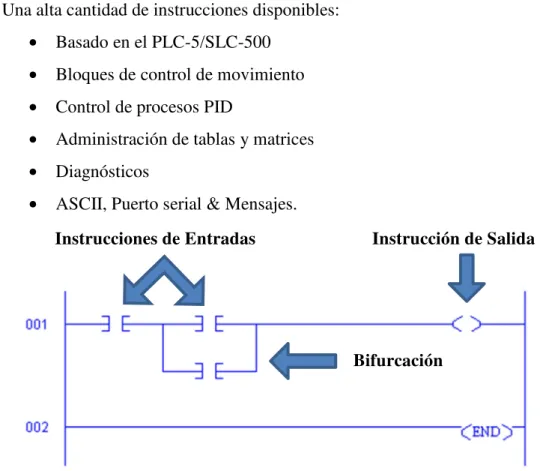
• Una alta cantidad de instrucciones disponibles:
• Basado en el PLC-5/SLC-500
• Bloques de control de movimiento
• Control de procesos PID
• Administración de tablas y matrices
• Diagnósticos
• ASCII, Puerto serial & Mensajes.
Figura 2.26. Programación en Escalera. (Arranque y Paro).
La lógica de escalera se organiza como los renglones de una escalera y las instrucciones se colocan en cada renglón. Existen tres tipos básicos de instrucciones:
1. Instrucción de entrada. Son los valores que toma el PAC de dispositivos externos del proceso.
2. Instrucción de salida. Realiza una acción, ya sea encender o apagar dispositivos, copiar datos o calcular un valor.
3. Bifurcación. Consta de instrucciones en paralelo.
Instrucciones de Entradas
Bifurcación
Diagrama de Bloques de Funciones
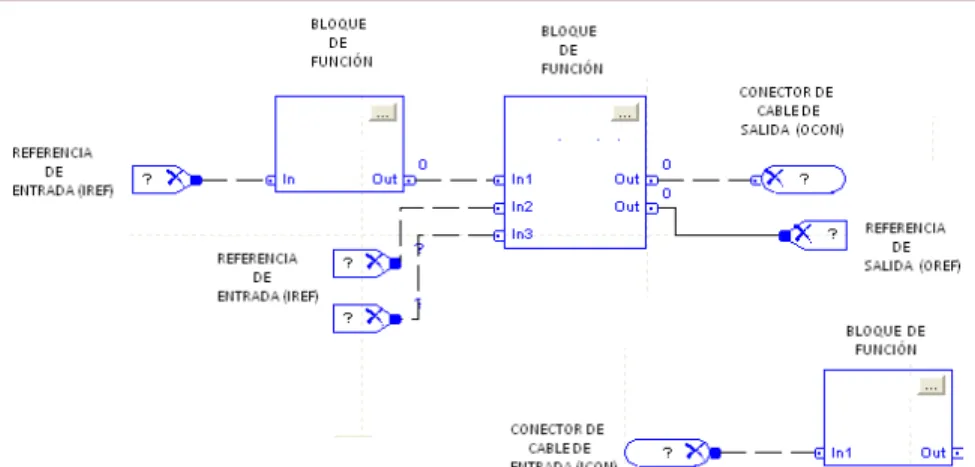
Es un lenguaje gráfico que permite al usuario programar elementos (bloque de funciones del PLC y PAC) en tal forma que ellos aparecen interconectados al igual que un circuito eléctrico (figura 2.26). Generalmente utilizan símbolos lógicos para representar al bloque de función. Las salidas lógicas no requieren incorporar una bobina de salida, porque la salida es representada por una variable asignada a la salida del bloque.
El diagrama de funciones lógicas, resulta especialmente cómodo de utilizar, a técnicos habituados a trabajar con circuitos de puertas lógicas, ya que la simbología usada en ambos es equivalente.
Adicionalmente a las funciones lógicas estándares y específicas del vendedor, el lenguaje FBD de la Norma IEC 1131-3 permite al usuario construir sus propios bloques de funciones, de acuerdo a los requerimientos del programa de control.
Figura 2.27. Programación en Diagrama de Bloques de Funciones (Arranque y Paro).
Selección de los Elementos de los Bloques de Función.
A continuación, en la figura 2.28, se describen los elementos que conforman y controlan un dispositivo.
Referencias de Entradas.
Bloque de Función OR.
Bloque de Función AND.
Figura 2.28. Elementos de una Programación en Bloques.
USE UN/UNA SI DESEA
Referencia de entrada (IREF) Proporcionar un valor proveniente de un
dispositivo de entrada o tag.
Referencia de salida (OREF Enviar un valor a un dispositivo de salida
o tag.
Bloque de función
Realizar una operación con un valor o valores de entrada y producir un valor o
valores de salida.
Conector de cable de salida (OCON) y un Conector de cable de entrada (ICON)
Transferir datos entre bloques de función cuando éstos están:
-Bastante separados en la misma hoja. -En hojas diferentes dentro de la misma
rutina.
Diagrama de Funciones Secuenciales (SFC)
Los Diagramas de Funciones Secuenciales (figura 2.29) es un tipo de programación basada en GRAFCET.
Puede ser usado para programar procesos que pueden ser separados en diferentes pasos. Los componentes principales de SFC son:
1. Pasos con acciones asociadas
3. Enlaces dirigidos entre Pasos y Transiciones
Los Pasos en los diagramas SFC pueden estar activos o desactivados. Las Acciones son solamente ejecutadas en pasos activos. Un paso puede estar activo por dos razones:
• Es el paso inicial
• Fue activado durante un ciclo y no ha sido desactivado.
Existen cuatro instrucciones básicas para la programación en SFC:
• Secuencia. Es un grupo de pasos que se ejecutan uno después del otro.
• Bifurcación de selección. Representa una opción entre una ruta (paso o grupo de pasos) y otra ruta. Consta de dos condicionantes:
• Solamente una ruta se ejecuta.
Transición
Paso
Paro
Transición
Acción
• De manera predeterminada, el SFC verifica las transiciones de izquierda a derecha. Y el SFC toma la primera ruta verdadera.
• Bifurcación Simultánea. Representa las rutas (pasos o grupos de pasos) que ocurren simultáneamente. Consta de tres condicionantes:
• Todas las rutas se ejecutan.
• Todas las rutas deben terminar antes de continuar con el SFC.
• El SFC verifica la transición después de que el último paso de cada ruta se haya
ejecutado por lo menos una vez.
• Conectar a un paso previo. Además de conectar pasos en secuencias, bifurcaciones simultáneas y bifurcaciones de selección, puede conectar un paso a un punto previo en el SFC. Esto le permite:
• Efectuar un lazo y repetir pasos.
• Regresar al comienzo del SFC y comenzar nuevamente.
No todos los lenguajes son iguales. Cada uno fue diseñado para soportar una clase particular de aplicación. El usar el lenguaje apropiado reduce la complejidad del programa, mejora el proceso de desarrollo, y reduce el tiempo de depurado y costos de mantenimiento.
2.3.2 RSLogix 5000
Para la realización de la lógica de una secuencia en un PAC existen diferentes software de programación de acuerdo a la marca utilizada, en el caso de Allen-Bradley, para sus controladores como FlexLogix, ControlLogix, CompactLogix y SoftLogix usan la plataforma RSLogix 5000 (figura 2.29).
Figura 2.30. Pantalla Principal de RSLogix 5000.
2.4 Comunicación
2.4.1 RSLinx Classic
RSLinx Classic es una herramienta para enlazarse con redes y dispositivos de Rockwell Automation, ver figura 2.31. Es una solución completa para comunicaciones industriales que puede utilizarse con los siguientes sistemas operativos:
• Microsoft Windows XP, XP SP1 o XP SP2
• Microsoft Windows Server 2003 SP1 o R2
• Microsoft Windows 2000 SP4
• Microsoft Windows Vista Business (32 bits) y Vista Home Basic (32 bits)
Figura 2.31. Enlace de RSLinx con diferentes Dispositivos.
Permite que el controlador programable Allen-Bradley acceda a una amplia variedad de aplicaciones de Rockwell Software y Allen-Bradley. Entre estas aplicaciones se incluyen desde configuración y programación tales como RSLogix y RSNetWorx hasta aplicaciones HMI (Interfaz Operador-Máquina) como RSView32, hasta sus propias aplicaciones de adquisición de datos mediante Microsoft Office, páginas Web o Visual Basic. Además, RSLinx Classic utiliza técnicas de optimización de datos avanzadas y dispone de una serie de diagnósticos. La interfaz de programación de aplicaciones (API) admite aplicaciones personalizadas creadas con RSLinx Classic SDK. RSLinx Classic es un servidor compatible con OPC Data Access y un servidor DDE.
Diferencias entre los distintos tipos de RSLinx Classic
RSLinx Classic está disponible en distintas versiones que satisfacen diversos requisitos en materia de costos y funciones. En función de la versión que ejecute, es posible que algunas funciones estén o no operativas.
La versión de RSLinx Classic que está ejecutando aparece en la barra de título en la parte superior de la ventana principal. Si se inicia una versión de RSLinx Classic sin los archivos de activación adecuados, se ejecuta como RSLinx Classic Lite.
• RSLinx Classic Lite. Ofrece las funciones mínimas necesarias para que sea compatible con RSLogix y RSNetWorx. Esta versión no admite OPC, DDE, ni la interfaz de programación de aplicaciones C (API) publicada de RSLinx Classic.
• RSLinx Classic Single Node. Incluye las funciones necesarias para ofrecer servicios de comunicación para todos los productos de Rockwell. Es compatible con las interfaces OPC y DDE, con un único dispositivo. No es compatible con las aplicaciones desarrolladas para la interfaz de programación de aplicaciones C (API) de RSLinx Classic ni con controladores directos de aplicaciones HMI.
• RSLinx Classic OEM. Incluye las funciones necesarias para ofrecer servicios de comunicación para todos los productos de Rockwell Software. Admite clientes OPC y DDE para tantos dispositivos como desee. También admite las aplicaciones desarrolladas para la Interfaz de aplicaciones C (API) de RSLinx.
• RSLinx Classic Professional. Incluye funcionalidades requeridas para la aplicación de servicios d comunicación para todos los productos Rockwell Software. soporta cualquier número de clientes OPC y DDE. También soporta aplicaciones desarrolladas para RSLinx Application Programing Interface (API) además RSLinx Professional contiene monitor de datos para PLC, SLC, MicroLogix y Control Logix basado en lógica de escalera para PLC y SLC, acceso a los datos de lógica de escalera entre RSLinx.
utilizan RSLinx Classic Lite o superior con un controlador de dispositivos remotos vía Linx Gateway configurado para comunicarse con RSLinx Classic Gateway. Las aplicaciones VB/VBA y HMI remotas, entre las que se incluye Microsoft Office, pueden utilizar conectividad OPC remota para comunicarse con RSLinx Classic Gateway a fin de recopilar datos. Esto permite que varios equipos distribuidos recopilen datos aunque no tengan instalado RSLinx Classic.
Además de ofrecer las mismas funciones que RSLinx Classic Professional, RSLinx Classic Gateway proporciona conectividad remota con:
• Varios clientes RSView32 que acceden a datos por medio de un RSLinx
Classic Gateway (conectividad OPC remota).
• Un equipo remoto que ejecuta RSLogix y se encuentra conectado a una red
de la planta por medio de un módem para cambios de programa en línea.
• Aplicaciones Microsoft Office remotas que muestran datos de la planta
como, por ejemplo, Excel.
• Una página Web que muestra datos de la planta cuando el servidor Web y
RSLinx Classic se encuentran en equipos distintos. [12]
2.4.2 OPC Server
Figura 2.32. Servidor OPC del Software RSLinx.
Existen cuatro tipos de servidores OPC definidos por la OPC Foundation, y son los siguientes:
• Servidor OPC DA. Basado en OPC Data Access. Especialmente diseñado para la
transmisión de datos en tiempo real.
• Servidor OPC HDA. Basado en la especificación de Acceso a Datos Historizados
que provee al Cliente OPC HDA de datos históricos.
• Servidor OPC A&E Server. Basado en la especificación de Alarmas y Eventos. Transfiere Alarmas y Eventos desde el dispositivo hacia el Cliente OPC A&E.
• Servidor OPC UA. Basado en la especificación de Arquitectura Unificada. Basado
en el set más nuevo y avanzado de la OPC Foundation, permite a los Servidores OPC trabajar con cualquier tipo de datos.
En conjunto, los tres primeros tipos de Servidores OPC se conocen como Servidores OPC "Clásicos" para distinguirlos de OPC UA que se convertirá en la base de las futuras arquitecturas OPC.
1. Comunicaciones Cliente OPC / Servidor OPC (Servidor OPC DA, Servidor
OPC HDA, Servidor OPC A&E) (figura 2.33).
Los Servidores OPC clásicos utilizan la infraestructura COM/DCOM de Microsoft Windows para el intercambio de datos. Lo que significa que esos Servidores OPC deben instalarse bajo el Sistema Operativo de Microsoft Windows. Un Servidor OPC puede soportar comunicaciones con múltiples Clientes OPC simultáneamente.
2. Servidor OPC - Traducción de Datos/Mapping (figura 2.33).
anteriormente (ejemplo: OPC DA para datos en tiempo real). Las especificaciones de la OPC Foundation solo definen la porción OPC de las comunicaciones del Servidor OPC, así que la eficiencia y calidad de traducción del protocolo nativo a OPC y de OPC al protocolo nativo dependen enteramente de la implementación del desarrollador del Servidor OPC.
3. Servidor OPC –Comunicación Fuente de Datos (figura 2.33).
Los Servidores OPC comunican nativamente con las fuentes de datos, por ejemplo: dispositivos, controladores y aplicaciones. Las especificaciones de la OPC Foundation no especifican como el Servidor OPC se debe comunicar con la fuente de datos porque hay una gran variedad de fuentes de datos disponibles en el mercado. Cada PLC, DCS, controlador, etc. tiene su propio protocolo de comunicación o API que a su vez permiten la utilización cualquier cantidad de conexiones físicas (serial RS485 o RS232, Ethernet, wireless, redes propietarias, etc.).
Figura 2.33. Estructura OPC Server.
Cliente OPC – Servidor OPC Comunicaciones (Uno o más Clientes OPC)
OPC
Datos Nativos
Dos ejemplos comunes de cómo se comunican los Servidores OPC con la Fuente de Datos son:
A través de una interfaz de programación de aplicaciones (API) para un driver personalizado escrito específicamente para la Fuente de Datos.
A través de un protocolo que puede o no ser propietario, o basado en un estándar abierto
(por ejemplo utilizando el protocolo Modbus. (MatrikonOPC Server para Modbus). [13]
2.5 RSLogix Emulate 5000
El software RSLogix Emulate 5000 (figura 2.34) es una herramienta de ingeniería de escritorio basada en Windows que puede emular un controlador Logix5000. Se puede usar en combinación con el software RSLogix 5000 para ejecutar y probar el código de aplicación sin necesidad de conectarse al hardware físicamente.
Si se usa el software RSLogix Emulate 5000 antes de iniciar un proyecto, es posible reducir drásticamente errores de programación costosos que usualmente podrían surgir en la planta. El software RSLogix Emulate 5000 le permite:
• Probar las pantallas de la interface operador-máquina.
• Hacerse cargo de la velocidad de ejecución de la aplicación al controlar la
“velocidad de tiempo” para monitorear mejor la operación de códigos e identificar los posibles problemas de temporización.
• Usar la instrucción de depuración de punto de rastreo para rastrear tags del programa de aplicación cuando ocurren ciertos eventos.
• Usar la instrucción de punto de interrupción para detener la ejecución del programa
basándose en errores o eventos en ubicaciones predeterminadas para analizar mejor su proceso.
Figura 2.34. RSLogix Emulate 5000.
Puertos de Comunicación de RSLinx
CPU
CAPÍTULO 3
CAPÍTULO 3. Software
En el presente capítulo se describe el funcionamiento de cada uno de los software a utilizar durante este trabajo.
Se explica cómo realizar un proyecto en FluidSIM, en RSLogix 5000, como dar de alta el RSLogix Emulate 5000 para crear la vinculación con el RSLinx y posteriormente mediante OPC comunicar los software con FluidSIM para observar la simulación de la secuencia completa.
3.1 Entorno a FESTO FluidSIM
Para el diseño y simulación de los diagramas de fuerza y control se cuenta con el software FESTO FluidSIM, este programa cuenta con todas las herramientas necesarias para realizar sistemas neumáticos, electroneumáticos, así como la posibilidad de poder monitorear y simular en tiempo real la operación del sistema neumático. El software permite ejecutar y dar una visualización clara del sistema neumático mostrando valores reales de fuerza y volumen, que tienen los cilindros neumáticos al estar operando, así como el estado de las entradas y salidas de señales externas, a través de su servidor OPC/DDE, con el que cuenta.
El servidor OPC/DDE, le permite al software una mayor versatilidad debido que permite comunicarse con cualquier otro software y hacer un intercambio de información, por ejemplo con RSLinx.
Figura 3.35. Pantalla Principal de FESTO FluidSIM.
• Biblioteca de componentes. Este contiene los componentes neumáticos y eléctricos para proceder al diseño de nuevos circuitos.
• Barra de Símbolos. La barra de Símbolos son los iconos con los que podemos guardar y crear un archivo, editar, simular circuitos.
• Indicador de estado. Informa durante el manejo de FluidSIM acerca de los cálculos y acciones actuales. En el modo de edición se inserta la denominación de los componentes en aquellos que se encuentren bajo el indicador del ratón.
• Área de Trabajo. En esta área se agregan los componentes neumáticos y eléctricos que se simularan y en las cuales se observara su funcionamiento.
Las herramientas antes mencionadas son la base para realizar procesos electroneumáticos con dispositivos virtuales con el fin de simular su comportamiento sin temor de sacrificar componentes físicos en caso de una prueba fallida.
FluidSIM es un software de fácil uso y entendimiento de desarrollo de diagramas, incluso contiene ayuda sobre cada componente, su funcionamiento, que es, y como realizar algunas tareas dentro de FluidSIM.
Biblioteca de Componentes
Barra de Símbolos
Superficie de Trabajo
Para realizar un proyecto se crea en el menú Archivo -> Nuevo y se abre el área de trabajo, posteriormente se arrastran los elementos de la biblioteca de componentes, como se muestra en la figura 3.36.
Figura 3.36. Inserción de Componentes.
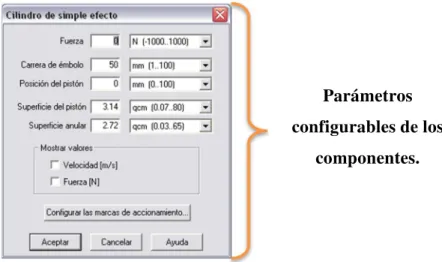
Para editar algún elemento se da doble clic sobre él y se abre un cuadro de parámetros a modificar del mismo, así como se muestra en la figura 3.37:
Figura 3.37. Parámetros a Editar.
Al conectar un elemento con otro se arrastra un punto de conexión de uno de ellos y se acerca al del siguiente hasta que aparezca un punto verde y se suelta, ver figura 3.38.
Parámetros configurables de los
Figura 3.38. Conexión de Componentes.
Para obtener ayuda de FESTO se puede seleccionar el dispositivo y con clic derecho dan
varias opciones: Funcionamiento del Componente, Descripción del Componente o en el
menú ? donde se despliega una lista general sobre todas sus funciones.
Si se desea realizar una simulación basta con poner Iniciar en el menú, como se muestra en
la figura 3.38:
Figura 3.39. Simulación en FluidSIM.
Existen diversas funciones del FluidSIM sin embargo solo se darán las bases en este apartado ya que más adelante se desarrollaran secuencias electroneumáticas vinculadas con RSLogix 5000.
3.2 Entorno a RSLogix 5000
• Barra de Herramientas. Creación de componentes - Esta barra de herramientas es para crear nuevos componentes del proyecto (por ejemplo, las etiquetas, las rutinas, programas, etc.)
• Barra en Línea - Esta barra de herramientas muestra el estado del programa y del controlador. También indica el modo de funcionamiento y si existen cambios pendientes
• Barra de Herramientas de la Lógica Común - Esta barra de herramientas contiene todos los elementos de lógica ladder que no son instrucciones (por ejemplo, rungs, ramas), así como las instrucciones más utilizadas.
• Barra de Herramientas Estándar - Esta barra de herramientas contiene las funciones (por ejemplo, Cut Copy, Paste) que va a utilizar varias veces a medida que desarrolle y pruebe su programa.
• Barra de Herramientas Editar- Esta barra de herramientas contiene toda la edición en línea de las funciones, así como algunas funciones comunes de edición. • Barra de Herramientas con Pestañas Instrucción- Esta barra de herramientas
muestra las categorías de instrucciones en pestañas. Al hacer clic en una pestaña, la barra de herramientas muestra las instrucciones de esa categoría si hace clic sobre alguna instrucción aparecerá en el programa ladder o en que se esté trabajando.
Barra de Herramientas Barra EnLínea Barra Lógica Común. Organizador del Controlador Barra de Estado.
Panel de Vistas Pestaña de Instrucciones
Barra de Herramientas
• Barra de Estado - Barra de estado para información de estado en curso del programa.
• Organizador del Controlador - Es una representación gráfica del contenido del archivo del controlador. En ella se podrá ver un directorio de carpetas y archivos las cuales contienen toda la información sobre los programas y datos del archivo del controlador actual.
• Panel de Vistas - La ventana principal del software RSLogix5000 le ofrece un marco en el que se pueden ver varios editores (por ejemplo, editor de ladder, editor de bloques de funciones, etc.)
• Ventana de Resultados - La ventana de resultados en la parte inferior de la ventana principal del RSLogix5000 muestra después de haber realizado una operación los resultados o errores. Esta ventana le proporciona la información del estado y de los errores de la operación que está ejecutando
• Pestaña Error - Si se realiza una operación que resulta en un error, el error se destaca en la ventana de resultados. [15]
3.2.1 Programación
Para iniciar con la programación es necesario seguir una serie de procedimientos que permitan un funcionamiento correcto en el software RSLogix5000:
• CPU para Módulo Virtual
La CPU con la que se trabajará, es la base del funcionamiento para la ejecución de los programas, cada uno con características y capacidades diferentes y su elección dependerá del proceso a realizar.
Debido a que se desea realizar una vinculación completamente virtual con el software de
simulación FESTO FluidSIM, la opción adecuada es seleccionar la CPU RSLogix
Emulate 5000 Controller, que es un controlador virtual.
escoger el tipo de chasis en que se monta; se escoge el Slot o Ranura en la que se coloca la CPU del PAC y por último la dirección donde se guardará el proyecto. Como se muestra a continuación en la figura 3.40.
Figura 3.40. Parámetros de Configuración para la creación de un Nuevo Proyecto.
• Configuración de E/S
Los módulos de entradas y salidas son los dispositivos que permiten enviar y recibir datos o señales dentro del controlador. Para emular existen dos alternativas, configuración de un módulo genérico y un módulo real.
NOTA: Se recomienda el uso del módulo genérico ya que nos brinda la ventaja de visualizar el comportamiento de las salidas.
• Módulo Genérico
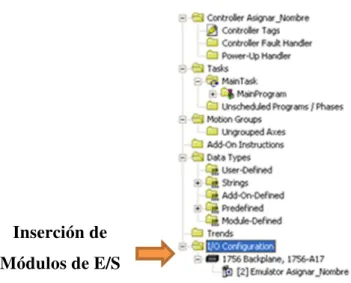
Una vez seleccionada la CPU, se procede a insertar módulos de E/S.
Dentro del Organizador del Controlador, se crea un nuevo módulo dando clic derecho sobre el controlador "1756 Backplane 1756, A17".
Se selecciona la opción "1756-Module" (Módulo Genérico) que se encuentra dentro de la rama "Other" (otros), mostrada en la figura 3.41.
Figura 3.41. Módulo Genérico.
Posteriormente se le designa un nombre y se escoge el Slot o ranura de montaje más cercana al CPU.
Los parámetros de conexión deberán ser como se indica en la siguiente figura, 3.42:
Inserción de Módulos de E/S
Figura 3.42. Parámetros, Matrices.
De esta forma se crean 2 matrices de entradas de 32 bits cada una y otra matriz de salida que al igual que la anterior es de 32 bits
NOTA: No se toma la matriz cero ya que el PAC reserva esa matriz para futuras expansiones.
Para finalizar asegúrese de cambiar el "intervalo entre paquetes solicitados" a 50,0 ms, tal cual se observa en la figura 3.43.
Figura 3.43. Intervalo entre Paquetes Solicitados.