UNIVERSIDAD NACIONAL DE TRUJILLO
FACULTAD DE INGENIERÍA
ESCUELA PROFESIONAL DE INGENIERÍA MECÁNICA
“SÍNTESIS DE UN MECANISMO DE CUATRO ESLABONES
PARA UNA SILLA DE DESCANSO USANDO EL MÉTODO DE
NEWTON-RAPHSON”
TESIS PARA OPTAR EL TÍTULO DE INGENIERO MECÁNICO
AUTOR : Br. CRIBILLERO ZEVALLOS, DEYVIS IRVING ASESOR : Mg. Ing. LEÓN LESCANO, EDWARD JAVIER
PRESENTACIÓN
Señor decano de la facultad de ingeniería. Señores miembros del jurado:
De conformidad con lo estipulado por el reglamento de grados y títulos de la Escuela Profesional de Ingeniería Mecánica de la Universidad Nacional de Trujillo, presento a su consideración el presente trabajo de Investigación titulado: “Síntesis de un mecanismo de cuatro eslabones para una silla de descanso usando el método de Newton-Raphson”.
El presente trabajo se realizó con la finalidad de obtener la síntesis óptima de un mecanismo de cuatro barras aplicado a una silla de descanso que garantice la estabilidad durante cambio de postura que el usuario desee adoptar, utilizando el método de Newton-Raphson y su respectivo código de programación en MATLAB, para diferentes posiciones de la silla teniendo como limites los ángulos de entrada y salida prescritas sobre la trayectoria mecanismo.
Para su ejecución se emplearon los conocimientos adquiridos en el curso de Teoría de máquinas y mecanismos, Matlab, Cálculo Integral y diferencial, así como los fundamentos de la metodología de la investigación científica.
Trujillo, Enero del 2019
DEDICATORIA
A DIOS por darme la vida y por acompañarme en cada paso que doy, por llenarme de su gracia y ser una fuente de inspiración, por fortalecer mi corazón e iluminar mi mente y por haber puesto en mi camino a aquellas personas que han sido mi soporte y compañía durante todo el periodo de estudio
A mi madre María.
Por haberme apoyado en todo momento, por sus consejos, sus valores, por la motivaciónconstante que me ha permitido ser una persona de bien, pero más que nada, por su amor.
A mi padre Gilder.
Por los ejemplos de perseverancia y constancia que lo caracterizan y que me ha infundadosiempre, por el valor mostrado para salir adelante y por su amor.
A mis hermanos, Denis y Fiorella por su apoyo incondicional y por estar conmigo en cada momento a lo largo de mi vida universitaria.
AGRADECIMIENTOS
Agradezco a DIOS por haberme acompañado a lo largo de mi carrera, por ser mi fortaleza en los momentos de debilidad y por brindarme una vida llena de aprendizajes,
experiencias y sobre todo felicidad.
A mis padres Gilder Cribillero Vega y María Zevallos Vasquez por apoyarme en todo momento, por los valores que me han inculcado, y por haberme dado la oportunidad de tener una excelente educación en el transcurso de mi vida. Sobre todo
por ser un excelente ejemplo de vida a seguir
A mis queridos hermanos Denis y Fiorella por ser parte importante de mi vida y representar la unidad familiar. Apoyarme constantemente día a día y brindarme
confianza en todo momento.
A mis profesores que se mostraron comprometidos con sus alumnos y con la ética puesto de manifiesto en las aulas que guían el destino de muchos jóvenes para la vida
diaria en la sociedad
Al Ing. Javier León Lescano, por su apoyo incondicional para llevar a cabo la presente tesis, por su asesoramiento durante el desarrollo de esta tesis, por ser un excelente
docente y por todo el conocimiento transmitido.
INDICE ANALÍTICO
CAPITULO I ... 8
I. Introducción ... 8
1.1. Realidad problemática ... 8
1.2. Problema ... 9
1.3. Hipótesis ... 10
1.4. Objetivos ... 10
1.4.1 Objetivo general ... 10
1.4.2 Objetivos específicos ... 10
1.5. Justificación ... 11
1.5.1. Justificación tecnológica ... 11
1.5.2. Justificación económica ... 11
1.5.3. Justificación social ... 11
CAPITULO II ... 12
II. Antecedentes y marco teórico ... 12
2.1 Antecedentes ... 12
2.2 Marco teórico ... 14
2.2.1 Planos principales del cuerpo humano ... 14
2.2.2 La postura corporal ... 15
2.2.3 Posiciones de descanso ... 16
2.2.4 La columna ... 17
2.2.5 La espalda ... 19
2.2.6 Ergonomia de una silla ... 20
2.2.7 Efectos de la postura sobre el cuerpo humano ... 21
2.2.8 Condiciones de una silla de descanso ... 23
2.2.9 Ángulos de confort….………..……….28
2.3 Condición de grashof ... 32
2.4 Analisis de posición del mecanismo plano de cuatro barras ... 33
2.5 Cinemática del mecanismo ... 35
2.6 Análisis de aceleración ... 37
2.7 Método de solución Newton-Raphson...39
2.8 Análisis algebraico y vectorial de posición del mecanismo de cuatro barras adaptado en una silla de descanso...44
2.9 Análisis de las posiciones y desplazamiento de las articulaciones A,B,C,D
del mecanismo de cuatro barras en la silla de descanso………....………...45
2.10 Algoritmo de solución para el sistema de ecuaciones no lineales………...49
CAPITULO III ... 55
III. Materiales y métodos ... 55
3.1 Material de estudio ... 55
3.2 Metodología... 55
3.2.1 Metodología empleada... 56
3.2.2 Variables de investigación ... 56
3.2.3 Variables de entrada... 57
3.2.4 Variables de Salida ... 57
3.3 Procedimiento ... 57
3.4 Diagrama de flujo del proceso realizado ... 58
CAPITULO IV ... 59
IV. Presentación y análisis de resultado ... 59
4.1 Algoritmo de optimización para diseñar un mecanismo de cuatro barras aplicado una silla de descanso ... 59
4.2 Minimización del error en las posiciones de los eslabones ... 60
4.3 Solución para el sistema de ecuaciones no lineales……….……62
4.4 Dimensionamiento del mecanismo de cuatro barras ... 70
4.5 Análisis de esfuerzos ... 72
4.6 Análisis de estabilidad de la silla de descanso ... 82
4.7 Construcción del mecanismo de cuatro barras para para una silla de descanso ... 85
4.8 Sistema de bloqueo de la silla de descanso ... 87
4.9 Discusión ... 88
CAPITULO V ... 90
V. Conclusiones y recomendaciones ... 90
5.1. Conclusiones ... 90
5.2. Recomendaciones ... 91
CAPITULO VI ... 92
VI. Referencias bibliográficas ... 92
RESUMEN
El presente trabajo titulado “Síntesis de un mecanismo de cuatro eslabones para una silla de descanso usando el método de Newton-Raphson”, se desarrolló utilizando la ecuación de Freudenstein para obtener las dimensiones óptimas de un mecanismo de cuatro barras en una silla de descanso, y garantizar la estabilidad en las posiciones extremas de la silla.
Los ángulos 𝜃1, 𝜃2 y 𝜃4 de los eslabones del mecanismo fueron tomados en base a la ergonomía de una silla de descanso y teniendo en cuenta la anatomía del cuerpo humano (espalda, piernas y brazos)
La síntesis del mecanismo fue planteada en la ecuación de Freudenstein para un mecanismo de cuatro eslabones, a la que se le aplicó el método de los mínimos cuadrados para minimizar el error en las posiciones deseadas (𝜃2 y 𝜃4) de los eslabones. Se obtiene un sistema de ecuaciones no lineales aplicando la derivada parcial con respecto a las constantes k de Freudenstein a la función que define las posiciones del mecanismo. Este sistema de ecuaciones no lineales se resolvió con el método de Newton Raphson. Las raíces de este sistema de ecuaciones no lineales (𝑘1, 𝑘2 y 𝑘3 ) son las longitudes de los eslabones del mecanismo de cuatro barras. Para usar este método en un sistema de ecuaciones no lineales se usó las series de Taylor debido a que son las que permiten llegar a la ecuación iterativa que resolverá el sistema de ecuaciones no lineales. El método de Newton Raphson se aplicó para 𝜃2 = 110°, 125°, 140°, 155° , 165° ; 𝜃4 = 97°, 116°, 134°, 153°, 165° y 𝜃1 = 10° determinando así los valores de 𝑘1, 𝑘2 y 𝑘3 .
Se realizó el código de programación en Matlab del método Newton Raphson. Se tomaron 5 posiciones angulares para 𝜃2 y 𝜃4. Una tolerancia o error de 0.0001, un máximo de iteraciones de 100(c=100) y partiendo de un vector inicial k0= (1, 1,1) que son valores iniciales de las constantes k con los cuales se va a iniciar el proceso de iteración. El programa convergió a las 12 iteraciones dando como resultado las longitudes óptimas del mecanismo de cuatro eslabones para una silla de descanso (r1=52 cm), (r2=15.3787 cm), (r3=55.4466 cm), (r4=11.5684 cm).
ABSTRACT
The present work entitled "Synthesis of a four-link mechanism for a rest chair using the Newton-Raphson method", was developed using the Freudenstein equation to obtain the optimal dimensions of a four-bar mechanism in a rest chair, and ensure stability in the extreme positions of the chair.
The angles 𝜃1, 𝜃2 and 𝜃4 of the links of the mechanism were taken based on the ergonomics of a resting chair and taking into account the anatomy of the human body (back, legs and arms)
The synthesis of the mechanism was proposed in the Freudenstein equation for a four-link mechanism, to which the least-squares method was applied to minimize the error in the desired positions (𝜃2 and 𝜃4) of the links. A system of non-linear equations is obtained by applying the partial derivative with respect to the k constants of Freudenstein to the function that defines the positions of the mechanism. This system of nonlinear equations was solved with the Newton Raphson method. The roots of this system of non-linear equations (𝑘1, 𝑘2 and 𝑘3) are the lengths of the links of the four-bar mechanism. To use this method in a system of nonlinear equations Taylor series were used because they are what allow us to arrive at the iterative equation that will solve system of nonlinear equations. The Newton Raphson method was applied at 𝜃2 =
110°, 125°, 140°, 155° , 165° ; 𝜃4 = 97°, 116°, 134°, 153°, 165° and 𝜃1 = 10° to determine the values of 𝑘1, 𝑘2 y 𝑘3.
The programming code was made in Matlab of the Newton Raphson method. We took 5 angular positions for 𝜃2 and 𝜃4. A tolerance or error of 0.0001, a maximum of iterations of 100 (c = 100) and starting from an initial vector k0 = (1, 1, 1) that are initial values of the constants k with which the process is going to start of iteration. The program converged to the 12 iterations resulting in the optimum lengths of the four-link mechanism for a rest chair (r1 = 52 cm), (r2 = 15.3787 cm), (r3 = 55.4466 cm), (r4 = 11.5684 cm).
CAPITULO I
I. Introducción
1.1.Realidad problemática
Cuando un usuario se sienta busca un apoyo corporal estable, con ello consigue un mayor control de los movimientos y una mayor capacidad visual, necesarios para determinadas tareas. Además la actividad muscular y las tensiones internas se ven reducidas, lo que proporciona un mayor descanso. [1]
Nuestra sociedad con el paso encarecido del tiempo ha cambiado tanto que no hemos tenido tiempo de interiorizar todos los cambios a los que nos vemos expuestos, cada día que pasa nos hacemos dependientes de la tecnología y no nos valemos de nuestras capacidades como antes, eso no quiere decir que la llegada de esta sea solo negativa, gracias a ella podemos realizar cosas que antes creíamos imposibles, como el poder acortar las distancias con personas que están tan lejos de nosotros, la herramienta que permite esto es el computador. Elementos como este hace que nuestra relación con la silla como usuarios, sea más estrecha, porque son muchas las horas que pasamos utilizándola; la silla cobra un significado totalmente diferente, en lugar de ser un producto que alivia nuestra fatiga, es uno de los principales causantes todo debido a una configuración formal y funcional poco ideal. [2]
El diseño de una silla es un problema complejo. Su diseño está condicionado en primer término a la actividad para la cual será destinada. Por lo tanto, el estudio y el análisis de la actividad realizada en ese contexto específico resultan de primordial importancia. [3] El dolor de espalda es uno de los motivos más frecuentes por los cuales se acude a la consulta médica y es preocupante la cada vez más temprana edad en la cual se presentan estos problemas, especialmente a partir de los 12 años. Entre un 45 y un 85% de la población general, en los países industrializados, sufre algún tipo de dolor de espalda en algún momento de su vida. [4]
consideramos que se debe poner hincapié en el punto donde se señala que la silla deberá ser adaptable a las distintas tipologías físicas de la persona. Sin embargo investigando el mercado nacional respecto al mobiliario con requisitos ergonómicos; se determina que éste no existe. Todas las sillas son importadas de Europa occidental, por tanto, no corresponden al perfil antropométrico peruano. En consecuencia cabe enfatizar que no se han hallado estudios de tablas antropométricas peruanas de forma oficial. [5]
En el desarrollo de ocupaciones y actividades el diseño industrial permite una resolución a una necesidad de sentarse, es decir de estar bien en una postura adecuada implementando el uso de un medio que facilita la vida doméstica [6]
Es fundamental establecer que dentro del diseño es importante la satisfacción del usuario y de todas sus necesidades; una necesidad que considero está presente en todos nosotros es la búsqueda de la comodidad, el ser humano en todos los aspectos siempre está buscando la manera de mejorar su calidad de vida, uno de los elementos que está bastante relacionado con esto es la silla, porque precisamente esa es su función, brindar comodidad a las personas aparte de estabilidad. Para un elemento que hace parte de nuestro diario vivir la silla tienes todavía factores que mejorar, que precisamente se hacen visibles en este trabajo, todo con el objetivo de mejorar y ofrecer una mejor experiencia al usuario. En este sentido, se plantea la siguiente tesis, con el fin de estudiar los parámetros posturales que afectan al confort del usuario y poder desarrollar el diseño de una silla de descanso haciendo uso del método newton-raphson.
1.2.Problema
1.3.Hipótesis
La síntesis de mecanismos planteada con la ecuación de Freudenstein para un mecanismo de cuatro barras es posible optimizar aplicando a esta ecuación el método de mínimos cuadrados para minimizar el error de las posiciones deseadas (𝜃2 y 𝜃4), al sistema de ecuaciones no lineales obtenido se aplica la serie de Taylor y con el método de Newton – Raphson se determina las dimensiones del mecanismo.
1.4.Objetivos
1.4.1 Objetivo general
Aplicar el método de Newton- Raphson para obtener las dimensiones optimas de los eslabones de un mecanismo de cuatro barras para una silla de descanso, que permita garantizar estabilidad en cada etapa de posición y reproducir el adecuado movimiento durante los cambios de posiciones de la silla que el usuario quiera adoptar.
1.4.2 Objetivos específicos
• Determinar las posiciones ergonómicas en la silla de descanso y los pivotes fijos para el mecanismo de cuatro barras de la silla de descanso.
• Aplicar el método de mínimos cuadrados a la ecuación de Freudenstein para minimizar el error entre las posiciones deseadas y obtenidas.
• Aplicar las series de Taylor para encontrar la ecuación iterativa cuya solución se determinara con el método de Newton Raphson
• Proponer el diseño del mecanismo de la silla de descanso.
1.5.Justificación
1.5.1. Justificación tecnológica
El presente trabajo contribuirá con la investigación del uso del método de Newton-Raphson en la optimización de síntesis de mecanismos, para el diseño de sillas de descanso en el campo industrial en el Perú.
1.5.2. Justificación económica
Este proyecto difundirá la fabricación de mecanismos articulados aplicados al diseño de una silla de descanso y en general, reduciendo los costos en la fase de diseño dado que se cuenta con la programación que optimizará el diseño del mecanismo en un menor tiempo requerido, incentivando así el crecimiento industrial en el campo de la ingeniería mecánica en nuestra nación.
1.5.3. Justificación social
CAPITULO II
II.Antecedente y marco teórico 2.1 Antecedentes:
A continuación se presenta un breve resumen de las investigaciones realizadas que sirvieron de base, por su metodología o contenido, para el desarrollo del presente trabajo:
El ph. D. Todor Stoilov Todorov de la Universidad técnica de Sofía, Bulgaria. En su obra “Síntesis de los mecanismos de cuatro barras por el método Freudenstein-Chebyshev” describe un nuevo método de síntesis dimensional. La función de posición de un mecanismo de cuatro barras es presentado por la ecuación de Freudenstein y es minimizado por la mejor aproximación de la teoría de Chebyshev. La función objetivo se utiliza como una ecuación exactamente satisfecha y la ecuación de Freudenstein se considera como un polinomio de Chebyshev. En algunos casos, el método brinda la posibilidad de encontrar soluciones simples de las tareas de síntesis. Estas soluciones se conocen como el mejor enfoque de Chebyshev de la función de objetivo ponderado. Este enfoque es muy cercano a la mejor opción para la función objetivo original. Nos brinda un ejemplo numérico que explica la esencia del método. [7]
Los ingenieros mecánicos, expertos en bioingeniería e ingeniería de materiales, Ashutosh Bijalwan y Anadi Misra. Del Instituto Tecnológico de la India, en su publicación científica “Diseño y análisis estructural de una silla portátil flexible utilizando el método de elementos finitos”. Desarrollaron una silla portátil flexible es como un exoesqueleto móvil ligero que permite a las personas sentarse en cualquier lugar en cualquier posición de trabajo. A diferencia de la silla tradicional, consiste en pares cinemáticos que permiten tomar detenciones entre movimientos continuos en cualquier posición de trabajo y por lo tanto, es capaz de reducir el riesgo del trastorno físico musculoesquelético sustancialmente entre los trabajadores. El objetivo de este trabajo fue enfocarse en el diseño mecánico y análisis de elementos finitos (FEA) del mecanismo usando el software ANSYS®. En el presente trabajo, todas las partes del mecanismo están diseñadas bajo condiciones de carga estática. Los resultados de análisis indican que la silla portátil flexible satisface el equilibrio y el criterio de estabilidad y es capaz de reducir la fatiga durante el trabajo en una línea de montaje / fábrica. [9]
El Dr. En ingeniería R.D.Ashkhedkar y el Ingeniero mecánico Rahul R.Gurpude del KDK de la facultad de ingeniería de la Universidad de Nagpur,India. En su estudio “Diseño, síntesis y simulación del mecanismo de cuatro barras para guiar una rueda para escalar”. Usan el metodo de chebyshev para la gran tarea de calcular las dimensiones de un mecanismo de cuatro barras según la tarea requerida, por lo tanto con la ayuda de la ecuación de chebyshev se obtienen varios grupos de solución dependiendo de la función y la simulación que se llevara a cabo, donde solo una solución puede servir de apoyo a la tarea requerida, es decir, lograr subir los escalones. [10]
El B. Eng. Scott B. Nokleby de la Universidad de Victoria, Canadá. En su tesis para obtener el grado de maestro en ciencia aplicadas, “optimización basada en la síntesis del mecanismo”. Emplearon el método de optimización Newton - Raphson para la síntesis mecanismos de Grashof. Muestran numerosos ejemplos que demuestran la efectividad de la optimización del metodo Newton- Raphson para la síntesis de mecanismos de cuatro barras, cinco barras y mecanismo Stephenson III de seis barras. [12]
2.2 Marco teórico
2.2.1 Planos principales del cuerpo humano
Para ubicar un punto cualquiera en el espacio son necesarias tres coordenadas, en la anatomía y por ende en la descripción de la biomecánica son necesarios tres planos como se muestra en la Figura 2.1. Si bien este trabajo está relacionado con el control, éste se está desarrollando para una silla de descanso.
2.2.2 La Postura Corporal
La postura corporal es inherente al ser humano, puesto que le acompaña las 24 horas del día y durante toda su vida. Kendall (1985) define la postura como “la composición de las posiciones de todas las articulaciones del cuerpo humano en todo momento”. Andújar y Santonja (1996) hacen referencia a los conceptos de postura correcta como "toda aquella que no sobrecarga la columna ni a ningún otro elemento del aparato locomotor", postura viciosa a "la que sobrecarga a las estructuras óseas, tendinosas, musculares, vasculares, etc., desgastando el organismo de manera permanente, en uno o varios de sus elementos, afectando sobre todo a la columna vertebral" y postura armónica como "la postura más cercana a la postura correcta que cada persona puede conseguir, según sus posibilidades individuales en cada momento y etapa de su vida". Santonja (1996) afirma que "las medidas de higiene postural no sólo son consejos sobre el mobiliario, sino que consisten en una interiorización de las actitudes del individuo ante la vida. Es la adopción de posturas no forzadas, cómodas, que no reportan sufrimiento para el aparato locomotor de nuestro organismo. No es el mantenimiento de una sola postura sino que es un concepto dinámico y más amplio". Según Aguado (1995), cuando una determinada postura se automatiza por su repetición constante se instauran los llamados hábitos posturales. La correcta adopción de las posturas a lo largo de todo el día y durante el crecimiento prácticamente asegura el correcto desarrollo de la columna vertebral. Desgraciadamente, es muy frecuente que los escolares adopten frecuentemente posturas incorrectas a lo largo del día.
¿Que posiciones requieren mayor esfuerzo?
Figura. 2.2 Posiciones de menor a mayor esfuerzo 2.2.3 Posiciones de descanso
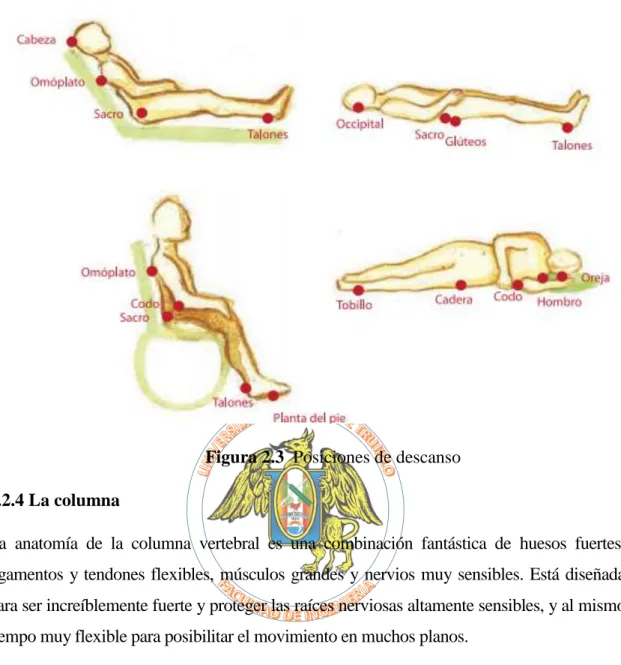
Las personas en situación de dependencia pueden estar largos periodos de tiempo con un gran sedentarismo e incluso inmovilismo, por lo que hay que proteger las zonas de riesgo en donde se pueden provocar úlceras por decúbito, sobre todo en las zonas de prominencias óseas.
¿Por qué son necesarios?
1.- Previenen la aparición de úlceras por presión.
2.- Mejoran la función cardiovascular y respiratoria.
3.- Evitan la rigidez articular y la flacidez muscular.
Figura 2.3 Posiciones de descanso 2.2.4 La columna
La anatomía de la columna vertebral es una combinación fantástica de huesos fuertes, ligamentos y tendones flexibles, músculos grandes y nervios muy sensibles. Está diseñada para ser increíblemente fuerte y proteger las raíces nerviosas altamente sensibles, y al mismo tiempo muy flexible para posibilitar el movimiento en muchos planos.
La columna vertebral tiene cuatro regiones principales:
1. La columna cervical (cuello)
El cuello soporta el peso de la cabeza y protege los nervios que salen del cerebro hacia el resto del cuerpo. Esta sección de la columna tiene siete cuerpos vertebrales (huesos) que se van achicando a medida que se acercan a la base del cráneo. La mayoría de la rotación de la columna cervical proviene de los dos segmentos superiores mientras que la mayor parte del movimiento de flexión/extensión proviene de las C5-C6 y C6-C7 (cada segmento de movimiento se denomina según los dos cuerpos vertebrales que están conectados).
2. La columna dorsal (parte superior de la espalda)
Los 12 cuerpos vertebrales en la parte superior de la espalda forman la columna dorsal. La firme unión de la caja torácica en cada nivel de la columna dorsal ofrece estabilidad y soporte estructural a la parte superior e inferior de la espalda y permite muy poco movimiento. La columna dorsal es básicamente una caja resistente diseñada para proteger los órganos vitales del corazón y pulmones.
La parte superior de la espalda no está diseñada para el movimiento y, por lo tanto, las lesiones en la columna dorsal son poco frecuentes
3. La columna lumbar (parte baja de la espalda)
La parte baja de la espalda tiene mucha más movilidad que la columna dorsal y también soporta el peso del torso. Como consecuencia, es la parte de la columna que se lesiona con mayor frecuencia.
4. La región sacra (parte baja de la columna vertebral)
Debajo de la columna lumbar hay un hueso llamado sacro, que forma la parte posterior de la pelvis. Este hueso tiene forma de triángulo que encaja entre las dos mitades de la pelvis, conectando la columna vertebral con la mitad inferior del cuerpo.
El sacro está conectado con parte de la pelvis (los huesos ilíacos) por las articulaciones sacro ilíacas.
2.2.5 La espalda
La espalda es la parte posterior del cuerpo humano que va de la base del cuello y hombros hasta la cintura. Está opuesta al pecho y su altura viene dada por la columna vertebral o espina dorsal. Su anchura va en función de la caja torácica y los hombros.
La parte central de la espalda es la columna vertebral, especialmente la zona que va desde la parte superior de las vértebras torácicas hasta el interior de las vértebras lumbares que contienen la médula espinal y que generalmente tiene una curvatura que da forma a la parte posterior. El costillar se extiende desde la espina dorsal hasta la parte superior de la espalda (con la parte superior que corresponde con la vértebra T1), más de la mitad de la espalda deja un área sin protección entre el interior de las costillas y las caderas. La anchura de la parte posterior de la espalda está definida por los omóplatos, los huesos amplios y planos de los hombros. Esta parte es fundamental para el ser humano ya que en ella se encuentra la columna vertebral, y sin ella no podríamos caminar.
2.2.6 Ergonomía de una silla
La ergonomía es una disciplina enfocada al estudio de la postura y los movimientos del cuerpo a fin de diseñar y recomendar un mejor uso y comodidad de los instrumentos de uso cotidiano.
Características de una silla ergonómica:
• Mayor superficie de asiento: Si el asiento no ha sido concebido óptimamente pude ocacionar zonas dolorosas y presión en la región glútea.
• Contacto permanente en el respaldo: Este sistema aporta mayor soporte en la región de las vértebras lumbares y previene las afecciones de la columna en esta área.
• Asiento Anatómico: este asiento está concebido para la protección de los discos intervertebrales y la pelvis. Minimizando su rotación
• Respaldo con soporte de la región pélvica: esto evita el vuelco excesivo de la pelvis, evitando malas posturas de las superficies articuladas en la columna lumbar.
• Regulación de la tensión: en los sistemas basculantes según altura y el peso del individuo se puede regular desde la posición de sentado la inclinación así como el bloqueo de esta.
2.2.7 Efectos de las posturas sobre el cuerpo 2.2.7.1 Efectos en la curvatura del raquis lumbar.
En la postura de pie, la zona lumbar vista de lado presenta una curvatura de concavidad posterior o lordosis. Cuando el sujeto se sienta, la pelvis gira hacia atrás, y para compensarlo el tronco se flexiona hacia delante (Figura 2.7). De esta forma, la lordosis lumbar disminuye e incluso se transforma en cifosis o convexidad posterior (Andersson, 1986). El uso de un apoyo lumbar ayuda a estabilizar la pelvis y, por tanto, a mantener la lordosis lumbar. Aún así, en posición sentada, nunca se podrán alcanzar niveles de 30º de lordosis como en postura de pie. El factor fisiológico que más afecta a la curvatura del raquis es la flexión de la cadera, aunque también lo hace la extensión de la rodilla en menor medida (Keegan, 1953; Brunswick, 1984; Andersson, 1986; Bridger et al., 1989a; Eklund y Liew, 1991; Bridger et al., 1992). Por esta razón, algunos autores (Mandal, 1986) recomiendan posturas sentadas con las rodillas flexionadas y la cadera en niveles de flexión similares a los que se presentan de pie. Por otra parte, la lordosis lumbar es fundamental para mantener el equilibrio en la postura de pie (Bridger, 1991), pero no tanto sentado.
Figura 2.7 Curvatura del raquis lumbar al sentarse 2.2.7.2 Efectos en los discos intervertebrales.
la postura lordótica habitual contribuye a la degeneración de los discos. Los discos intervertebrales son estructuras sin riego sanguíneo, por Introducción. Revisión bibliográfica. 5 lo que su nutrición se realiza por dos efectos: difusión de los nutrientes (fenómeno químico) e intercambio de fluido con las zonas adyacentes (fenómeno físico). El efecto de la difusión no es suficiente para una buena nutrición, por lo que es necesario un gran intercambio de fluido para ayudar a su nutrición. Cuando la carga a la que están sometidos los discos varía, el intercambio de fluido se hace lo suficientemente grande para conseguirlo (Adams y Huton, 1983). Este efecto de intercambio de fluido es mayor en los discos flexionados que en los erguidos. Por esta razón se recomienda que el diseño del mueble permita cambios de postura, que ayuden a modificar la presión intervertebral y nutrir los discos.
2.2.7.3 Efectos en la actividad muscular.
En la zona lumbar se obtienen niveles de actividad muscular similares al estar de pie que al estar sentado en postura erguida y sin respaldo. Es decir, que el esfuerzo muscular necesario para mantener la lordosis lumbar sin respaldo es del mismo orden de magnitud que para mantenerla en postura de pie. Por contra, cuando se flexiona la espalda o se utiliza un apoyo lumbar este nivel de actividad disminuye. Cuando los brazos se descansan sobre un reposabrazos, la actividad muscular lumbar también disminuye (Andersson, 1986). Además cuanto más se inclina el respaldo hacia atrás, más disminuye la actividad muscular en la zona lumbar, ya que se descansa mayor parte del peso corporal en el respaldo. La actividad muscular en cuello, espalda y hombros depende de la relación existente entre la altura del asiento y la altura de la mesa (Andersson y Örtegren, 1974) y también de la existencia y características de los reposabrazos. Una mesa muy alta sobrecarga los músculos de los hombros, mientras que una mesa muy baja sobrecarga los del cuello. La ausencia de reposabrazos sobrecarga los de los hombros.
2.2.7.4 Efectos en los tejidos superficiales.
individuo tiende a moverse, cambiando así la distribución de presiones en las superficies de apoyo. Por ello, las superficies de apoyo deben ser acolchadas y con una base firme para dar buen soporte.
2.2.7.5 Efectos en la circulación sanguínea.
Por una parte, al bajar la altura del corazón con respecto a las piernas, la presión venosa en las piernas disminuye en la postura sentada, lo cual es 6 Capítulo I ventajoso. Pero, por otra parte, si se comprime una vena o una arteria en algún punto, puede aparecer hinchazón y entumecimiento de las piernas (Zacharkov, 1988). Una sensación similar puede aparecer si se mantienen las piernas quietas o con ángulos muy cerrados en las articulaciones. Si el asiento es demasiado alto, se puede comprimir la zona de los muslos, y si se adoptan posturas desplomadas, la zona propensa a comprimirse son las nalgas.
2.2.7.6 Efectos en los nervios.
La compresión de los nervios puede afectar a la función motora (perdiendo fuerza o entorpeciendo el movimiento de los músculos) y a la sensitiva (se ‘duerme’ una parte del cuerpo). Al sentarse, los nervios que se pueden comprimir son los que se encuentran en los muslos y nalgas, afectando así a las funciones de las piernas. Al apoyar los brazos, por presión en el reposabrazos, se puede comprimir el nervio cubital a la altura del codo, afectando así a la palma de la mano y los dedos.
2.2.7.7 Efectos en el calor corporal.
Al estar sentado, la silla recubre toda la superficie posterior del cuerpo. De esta forma, las características de la silla en cuanto a temperatura e intercambio de calor influyen en la sensación de comodidad. Por esta razón, los tapizados deben ser transpirables.
2.2.7.8 Efectos en las vísceras.
Al sentarse inclinado hacia delante, la digestión y la respiración pueden verse dificultadas, debido al aumento de presión abdominal. (Zacharkov, 1988).
2.2.8 Condiciones de una silla para descanso
que se ubica el hombre en el puesto de trabajo en estudio, partiendo que a través de la estructura ósea del ser humano se hace la descarga del peso del cuerpo y no por los músculos; lo que es cierto es que los huesos descargan el peso sobre las nalgas al sentarse, o una combinación de estas con otros músculos.
Figura 2.8 Descarga del peso del tronco en posición sedante
Akerblon dice, "todos los diseñadores de sillas han supuesto que los músculos deban descansar firmemente sobre el asiento, para repartir de la mejor manera posible el área de soporte del peso, distribuyendo así la presión ejercida por la parte superior del cuerpo". "Los tejidos blandos como los músculos no pueden, evidentemente, ofrecer tal apoyo y la única parte de los muslos que podría cumplir esa función es el hueso interior de la pierna".
En esa posición se comprimirán los tejidos y además de algunas consecuencias dañinas para los músculos y los nervios.
Algunas investigaciones efectuadas por Herber en el Wright Air Center en relación con asientos normales y el peso de las nalgas, llevaron a concluir con la carga que debe soportar un asiento cuya parte de mayor esfuerzo es la correspondiente a las tuberosidades, pueden llegar hasta los 4,5 Kg/cm2 pudiendo llegar a ser mayor, por otro lado en el manual de ergonomía de MAPFRE se cita "en la posición sedante el 75 % aproximadamente del peso se transmite a través de las tuberosidades isquiáticas hasta el asiento". "Las presiones alcanzadas son de unos 6-7 kg/cm2 al nivel de esta zona y de 2-4 Kg/cm2 en la superficie de la piel -4; De acuerdo a la altura del asiento se tendrá al sentarse diferentes posiciones, si la altura es mayor o igual a la altura de la pantorrilla a la planta del pie, en el asiento se apoyan las nalgas y los muslos, si esta fuera menor solo las nalgas y si este fuera extremadamente bajo solo apoyan las tuberosidades isquiales, protuberancia del hueso de la cadera.
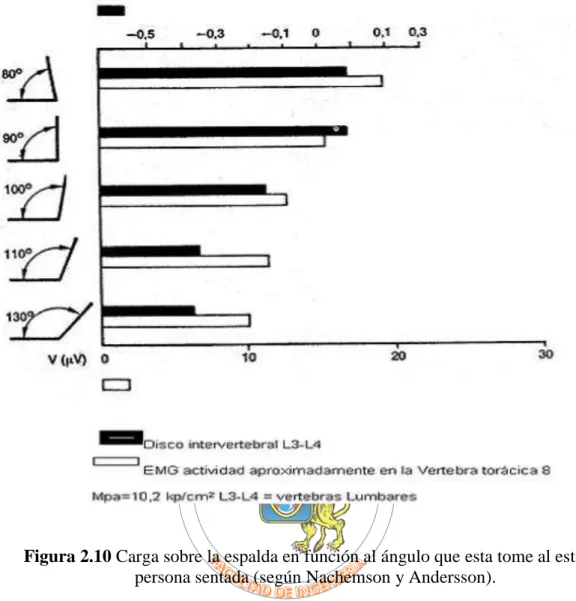
Otro elemento importante en la magnitud de la presión a la que están sometidas las nalgas es la forma de la superficie de apoyo, una superficie plana brinda menos contacto muscular para el intercambio de carga mientras que una superficie curva (anatómica) permite una mayor superficie de contacto y al contener la masa muscular impide la deformación haciendo que exista mayor espesor (más fibras), traumatizando menos al músculo, lo que hace que el cuerpo descanse más.
Figura 2.10 Carga sobre la espalda en función al ángulo que esta tome al estar la persona sentada (según Nachemson y Andersson).
Para sentarse correctamente se deberá tener en cuenta la posición de la cabeza que deberá adoptarse, sobre la base del ángulo visual necesario el efectuar la tarea, procurando no efectuar grandes flexiones del cuello. Debiendo tener en cuenta que un ángulo de la línea de 15° por debajo de la horizontal, no reviste carga pudiendo la persona trabajar sin problemas durante períodos de tiempo largos con visualización constante, de los 15° hasta los 45° requiere a medida que aumenta más esfuerzo, por lo tanto variará en forma inversamente proporcional el tiempo de trabajo sin descanso.
Figura 2.11 Partes del cuerpo comprometidas (con molestias) según la forma de sentarse (Grandjeam y Burant).
Sobre la base de lo expuesto Grandjean y otros, determinaron dos perfiles de asientos uno para usos múltiples y el otro para descanso.
Figura 2.12 Perfiles de asientos, para uso múltiple a la izquierda y para descanso a la derecha entre ambas hay un contenido subjetivo del confort humano (del usuario)
2.2.9 Ángulos de confort
Cuando analizamos movimientos, hemos de tener presente que la mayoría de las veces no nos interesa el rango máximo de la articulación, sino los valores de confort de los ángulos que tienen las diversas articulaciones, fuera de los cuales la posición y el trabajo a realizar es más difícil, penoso o incluso peligroso para las personas. Cabe destacar que la horquilla de ajuste de los ángulos de confort dependerá también de la edad, el entrenamiento físico, las diferencias anatómico-funcionales, etc.
Buscar el ángulo de asiento que ofrece el mayor nivel de confort es una misión compleja. Ingeniero de partes y diseñador de modas, el diseñador de sofás debe mezclar el arte y la ciencia para lograr el nivel adecuado de comodidad dentro del contexto de las preferencias del consumidor. Los asientos inclinados hacia atrás; todos ellos lo hacen en diferentes grados. Este es un hecho en el que todos pueden estar de acuerdo.
Cualquier persona cuya parte trasera se haya vuelto adormecida por estar sentado en una superficie dura y plana durante demasiado tiempo entiende la importancia de la
ergonomía en el diseño de los asientos. Nuestros cuerpos saben que ninguna superficie de asiento cómoda es plana.
Un asiento en ángulo es importante debido a la forma en que una silla ejerce fuerza sobre el cuerpo humano. Cuando un cuerpo sentado presiona una superficie, la superficie se empuja contra el cuerpo. Según Pete Dodge, cómo y dónde la fuerza ascendente de la amortiguación se centra en el cuerpo hace una gran diferencia en la comodidad. “Hay un par de puntos que no deben soportar el peso del cuerpo, detrás de las rodillas, donde están los tendones y en la base de la columna vertebral. Ninguna silla exitosa pone (presión sobre) ninguno de los dos lugares”. Más bien, la base de los muslos es la parte del cuerpo más adecuada para soportar el peso corporal y la fuerza de la silla.
Si la vertical se considera 90 grados, los sujetos prefirieron un ángulo de aproximadamente 110 grados. Harvey Bigelow de Harvey Bigelow Designs señaló que un asiento inclinado hacia atrás ayuda a las personas a inclinarse menos. Herman Miller también descubrió que una posición reclinada es mejor para la salud de la espalda: "Cuando una persona se sienta en una silla y usa su respaldo reclinable, la presión del disco disminuye hasta en un 20 por ciento".
Los ángulos de confort de A. Wisner, recomendados para posturas que se deban mantener durante un tiempo, y con un mínimo coste energético son:
Tabla 2.1 Ángulos de confort según A. Wisner
Figura 2.14 Aplicación de los ángulos de confort para una persona en posición de descanso
•Ángulo A1
a 25°, ni inferior a 10°. Fuera de estos límites, aparece una fatiga importante a nivel de nuca. En la práctica, el valor A1 está alrededor de 15°.
•Ángulo A2
Está definido por los segmentos hombro-cadera, y cadera-rodilla. El muslo debe quedar paralelo al suelo, y no debe, en ningún caso, estar inclinado hacia abajo, so pena de comprimir el paquete neurovascular de la cara posterior del muslo, por el borde de la silla. El ángulo A2 debe estar comprendido entre 90° y 110°.
•Ángulo A3
Está delimitado por los segmentos cadera-rodilla y rodilla-tobillo. Los valores límites de este ángulo están comprendidos entre 95° y 120°, con el fin de evitar un riesgo circulatorio, así como una hiperextensión de la pierna.
•Ángulo A4
Es el que forma el segmento rodilla-tobillo con una recta paralela a la planta del pie. Se trata de una dimensión crítica, como testimonian los calambres sufridos por algunas personas después de un trabajo prolongado. El valor del ángulo debe estar comprendido entre 90° y 110° máximo.
•Ángulo A5
Este ángulo está limitado por el segmento hombro-codo y la vertical pasando por el hombro. Hemos visto que el segmento hombro-cadera forma con la vertical un ángulo A1 de 15° cuando la persona está sentada normalmente. El brazo no puede encontrarse detrás del segmento cadera-hombro, pues es proyectado hacia adelante
por la forma del respaldo. Para evitar una fatiga de los músculos de los miembros superiores, el ángulo A5 no debe de pasar de un valor máximo de 35°.
Los valores límites del ángulo A.5 serán, pues, de 15° y 35°. El ángulo puede ser de 45° cuando los codos reposen sobre un apoyo.
•Ángulo A6
El ángulo A.6 está limitado por el segmento hombro-codo y el segmento codo-muñeca. Los límites de los movimientos son muy largos; estos límites de confort han sido evaluados de 80° a 160°.
•Ángulo A7
2.3 La condición de Grashof[14]:
El eslabonamiento de cuatro barras es el mecanismo articulado más simple posible para movimiento controlado con grado de libertad simple. También aparece con varias formas tales como la de manivela-corredera y la de leva y seguidor. De hecho, es el dispositivo más común y omnipresente utilizado en maquinaria. También es extremadamente variado en función de los tipos de movimiento que puede generar. La menor cantidad de partes que puede realizar el trabajo en general será la solución menos cara y más confiable. Por lo tanto, el eslabonamiento de cuatro barras deberá estar entre las primeras soluciones a problemas de control de movimiento a ser investigados.
La condición de Grashof es una relación muy simple que predice el comportamiento de rotación o potabilidad de las inversiones de un eslabonamiento de cuatro barras basado solo en las longitudes de los eslabones.
Sea:
S = longitud del eslabón más corto.
L = longitud del eslabón más largo.
P = longitud de un eslabón restante.
Q = longitud de otro eslabón restante.
Luego si:
S + L ≤ P + Q (2.1)
El eslabonamiento es de Grashof y por lo menos un eslabón será capaz de realizar una revolución completa con respecto al plano de bancada. Esta se llama cadena cinemática de clase I. Si la desigualdad no es cierta, entonces el eslabonamiento no es Grashof y ningún eslabón será capaz de realizar una revolución completa con respecto a cualquier otro eslabón. Esta es una cadena cinemática de clase II.
2.4 Análisis de posición del mecanismo plano de cuatro barras.
Figura 2.16 Mecanismo plano de cuatro barras.
Considere el mecanismo plano de cuatro barras mostrado en la figura 2.16. La ecuación del lazo del mecanismo está dado por:
𝑎⃗2+ 𝑎⃗3 = 𝑎⃗1+ 𝑎⃗4 (2.2)
Si se seleccionan los ángulos asociados a los vectores, θ1, θ2, θ3, θ4, a partir del semieje positivo X, las componentes escalares de la ecuación (2.2), a lo largo de los ejes X y Y están dadas por :
𝑎2𝐶𝜃2 + 𝑎3𝐶𝜃3 = 𝑎1𝐶𝜃1+ 𝑎4𝐶𝜃4
𝑎2𝑆𝜃2 + 𝑎3𝑆𝜃3 = 𝑎1𝑆𝜃1+ 𝑎4𝑆𝜃4 (2.3)
Debe notarse que los parámetros del mecanismo son a1, a2, a3, a4, θ1, mientras que las variables son θ2, θ3, θ4. Más aún, si el eslabón motriz es el eslabón 2, el Angulo θ2 aun cuando es una variable, es un dato necesario para realizar el análisis de posición, de modo que las dos ecuaciones (2.3) cuya solución constituye el análisis de posición están dadas por :
𝑓1(𝜃3, 𝜃4) = 𝑎2𝑆𝜃2+ 𝑎3𝑆𝜃3− 𝑎1𝑆𝜃1− 𝑎4𝑆𝜃4= 0
La matriz Jacobiana asociada a este sistema de dos ecuaciones con dos incógnitas está dada por:
𝐽(𝜃3, 𝜃4) =
[ 𝜕𝑓1
𝜕𝜃3 𝜕𝑓1
𝜕𝜃4 𝜕𝑓2 𝜕𝜃3
𝜕𝑓2 𝜕𝜃4]
= [−𝑎3𝑆𝜃3 𝑎4𝑆𝜃4
𝑎3𝐶𝜃3 −𝑎4𝐶𝜃4] (2.5)
Es importante notar que el determinante de la matriz jacobiana está dado por :
|𝐽(𝜃3, 𝜃4)| = 𝑎3𝑎4(𝑆𝜃3𝐶𝜃4− 𝐶𝜃3𝑆𝜃4) = 𝑎3𝑎4𝑆(𝜃3− 𝜃4) (2.6)
Con las ecuaciones (2.4, 2.5) es posible realizar el analisis de posicion del mecanismo plano de cuatro barras. Suponga ahora que se ha realizado el analisis de posicion del mecanismo plano de cuatro barras, derivando las ecuaciones (2.4), con respecto al tiempo se obtienen las ecuaciones correspondientes al analisis de velocidad del mecanismo plano de cuatro barras. Estas ecuaciones estan dadas por :
𝑔1(𝜔3, 𝜔4) = −𝑎2𝑆𝜃2𝜔2− 𝑎3𝑆𝜃3𝜔3+ 𝑎4𝑆𝜃4𝜔4 = 0
𝑔1(𝜔3, 𝜔4) = 𝑎2𝐶𝜃2𝜔2+ 𝑎3𝐶𝜃3𝜔3− 𝑎4𝐶𝜃4𝜔4 = 0 (2.7)
Debe notarse que, una vez resuelto el análisis de posición del mecanismo plano de cuatro barras, las ecuaciones (2.7) representan un sistema lineal de dos ecuaciones con dos incógnitas, ω3 y ω4. Este sistema de ecuaciones puede escribirse en forma matricial como:
[−𝑎3𝑆𝜃3 𝑎4𝑆𝜃4 −𝑎3𝐶𝜃3 −𝑎4𝐶𝜃4] [
𝜔3
𝜔4] = [
𝑎2𝑆𝜃2𝜔2
−𝑎2𝐶𝜃2𝜔2] (2.8)
mecanismo. Por lo que, excepto en un caso, si el análisis de posición tiene solución, entonces el análisis de velocidad del mecanismo tiene una solución única.
2.5 Cinemática del mecanismo[15]
Una vez que se analiza la posición, el siguiente paso es determinar las velocidades de todos los eslabones y puntos de interés en el mecanismo. Es necesario conocer todas las velocidades en el mecanismo o máquina. Existen muchos métodos para hallar las velocidades en los mecanismos, aquí se muestra uno de ellos.
Figura 2.17 Mecanismo de cuatro barras que muestra vectores de velocidad para una 𝑤2 negativa
𝑉𝐴 + 𝑉𝐵𝐴− 𝑉𝐵= 0 (2.9)
Donde: 𝑉𝐴 = 𝑗𝑎𝑤2𝑒𝑗𝜃2
𝑉𝐵𝐴 = 𝑗𝑏𝑤3𝑒𝑗3 (2.10)
Ahora se resuelve la ecuación para w3 y w4, con la velocidad de entrada w2, las longitudes de los eslabones y todos los ángulos de los eslabones conocidos.
La estrategia de solución será la misma para el análisis de posición. En primer lugar, se sustituye la identidad de Euler en cada término de la ecuación (2.10)
𝑗𝑎𝑤2(𝑐𝑜𝑠𝜃2 + 𝑗𝑠𝑒𝑛𝜃2) + 𝑗𝑏𝑤3(𝑐𝑜𝑠𝜃3 + 𝑗𝑠𝑒𝑛𝜃3) − 𝑗𝑐𝑤4(𝑐𝑜𝑠𝜃4+ 𝑗𝑠𝑒𝑛𝜃4) = 0
Se multiplica por el operador j:
𝑎𝑤2(𝑐𝑜𝑠𝜃2+ 𝑗2𝑠𝑒𝑛𝜃2) + 𝑏𝑤3(𝑐𝑜𝑠𝜃3+ 𝑗2𝑠𝑒𝑛𝜃3) − 𝑐𝑤4(𝑐𝑜𝑠𝜃4+ 𝑗2𝑠𝑒𝑛𝜃4) = 0
Los términos coseno se vuelven imaginarios o términos dirigidos hacia 𝑦 y como
𝑗2 = −1, los términos seno se vuelven reales o dirigidos hacia 𝑥.
𝑎𝑤2(−𝑠𝑒𝑛𝜃2+ 𝑗𝑐𝑜𝑠𝜃2) + 𝑏𝑤3(−𝑠𝑒𝑛𝜃3+ 𝑗𝑐𝑜𝑠𝜃3) − 𝑐𝑤4(−𝑠𝑒𝑛𝜃4+ 𝑗𝑐𝑜𝑠𝜃4) = 0
(2.11)
Ahora es posible separar esta ecuación vectorial en sus dos componentes reuniendo todos los términos reales e imaginarios por separado:
Parte real (componente x):
−𝑎𝑤2𝑠𝑒𝑛𝜃2−𝑏𝑤3𝑠𝑒𝑛𝜃3+ 𝑐𝑤4𝑠𝑒𝑛𝜃4 = 0 (2.12)
Parte imaginaria (componente y):
𝑎𝑤2𝑐𝑜𝑠𝜃2+𝑏𝑤3𝑐𝑜𝑠𝜃3− 𝑐𝑤4𝑐𝑜𝑠𝜃4 = 0 (2.13)
Observe que las j se cancelaron en la ecuación 2.11 Se pueden resolver estas dos ecuaciones 2.12 y 2.13, simultáneamente mediante sustitución directa para obtener:
𝑤3 = 𝑎𝑤2𝑠𝑒𝑛(𝜃4 − 𝜃2)
𝑤4 =𝑎𝑤2𝑠𝑒𝑛(𝜃2− 𝜃3) 𝑐𝑠𝑒𝑛(𝜃4− 𝜃3)
2.6 Análisis de aceleración
Una vez que se ha hecho el análisis de la velocidad, el siguiente paso es determinar las aceleraciones de todos los eslabones y puntos de interés en el mecanismo o máquina. Se deben conocer las aceleraciones para calcular las fuerzas dinámicas con F=ma. Las fuerzas dinámicas contribuirán a los esfuerzos en los eslabones y otros componentes.
Figura 2.18 Lazo vectorial de posición de un mecanismo de cuatro barras que muestra vectores de aceleración
𝐴𝐴+ 𝐴𝐵𝐴− 𝐴𝐵 = 0
(2.15)
Donde:
𝐴𝐴 = (𝐴𝐴𝑡 + 𝐴𝐴𝑛) = (𝑎𝛼2𝑗𝑒𝑗𝜃2− 𝑎𝑤22𝑒𝑗𝜃2)
𝐴𝐵𝐴 = (𝐴𝐵𝐴𝑡 + 𝐴𝐵𝐴𝑛 ) = (𝑏𝛼3𝑗𝑒𝑗𝜃3− 𝑏𝑤32𝑒𝑗𝜃3)
𝐴𝐵 = (𝐴𝐵𝑡 + 𝐴𝐵𝑛) = (𝑐𝛼4𝑗𝑒𝑗𝜃4 − 𝑐𝑤42𝑒𝑗𝜃4)
La estrategia de solución será la misma forma que en el análisis de la posición y velocidad. Primero se sustituye la identidad de Euler y luego se separa en términos reales e imaginarios.
Parte real (componente x):
−𝑎𝛼2𝑠𝑒𝑛𝜃2− 𝑎𝑤22𝑐𝑜𝑠𝜃2− 𝑏𝛼3𝑠𝑒𝑛𝜃3− 𝑏𝑤32𝑐𝑜𝑠𝜃3+ 𝑐𝛼4𝑠𝑒𝑛𝜃4− 𝑐𝑤42𝑐𝑜𝑠𝜃4 = 0
Parte imaginaria (componente y)
𝑎𝛼2𝑐𝑜𝑠𝜃2 − 𝑎𝑤22𝑠𝑒𝑛𝜃2+ 𝑏𝛼3𝑐𝑜𝑠𝜃3− 𝑏𝑤32𝑠𝑒𝑛𝜃3 − 𝑐𝛼4𝑐𝑜𝑠𝜃4 + 𝑐𝑤42𝑠𝑒𝑛𝜃4 = 0
Donde asumiendo estos valores a las variables A, B, C, D, E, F:
𝐴 = 𝑐𝑠𝑒𝑛𝜃4
𝐵 = 𝑏𝑠𝑒𝑛𝜃3
𝐶 = 𝑎𝛼2𝑠𝑒𝑛𝜃2 + 𝑎𝑤22𝑐𝑜𝑠𝜃
2+ 𝑏𝑤32𝑐𝑜𝑠𝜃3 − 𝑐𝑤42𝑐𝑜𝑠𝜃4
𝐷 = 𝑐𝑐𝑜𝑠𝜃4
𝐸 = 𝑏𝑐𝑜𝑠𝜃3
𝐹 = 𝑎𝛼2𝑐𝑜𝑠𝜃2 − 𝑎𝑤22𝑠𝑒𝑛𝜃2− 𝑏𝑤32𝑠𝑒𝑛𝜃3+ 𝑐𝑤42𝑠𝑒𝑛𝜃4
Se obtienen las siguientes ecuaciones de las aceleraciones angulares.
𝛼3 =
𝐶𝐷 − 𝐴𝐹 𝐴𝐸 − 𝐵𝐷
𝛼4 =
𝐶𝐸 − 𝐵𝐹 𝐴𝐸 − 𝐵𝐷
(2.17)
(2.20) (2.18)
(2.19)
2.7 Método de solución de Newton-Raphson [16]
Los métodos de solución para análisis de posición mostrados hasta ahora en este capítulo son de “forma cerrada” lo que significa que proporcionan la solución con un método directo no iterativo. En algunas situaciones, en particular con mecanismos de lazos múltiples, una solución de forma cerrada puede no ser factible. En tal caso, se requiere un método iterativo y el método de Newton-Raphson (en ocasiones llamado sólo método de Newton) es uno que puede resolver conjuntos de ecuaciones simultáneas no lineales. Cualquier método de solución iterativo requiere uno o más valores supuestos para iniciar el cálculo. Luego los utiliza para obtener una solución nueva que puede aproximarse a la correcta. Este proceso se repite hasta que converge en una solución suficientemente próxima a la correcta para propósitos prácticos. Sin embargo, no existe garantía de que un método iterativo convergirá. Puede divergir y dar soluciones sucesivas que se alejan de la correcta, en especial si la suposición inicial no se aproxima lo suficiente a la solución real.
2.7.1 Determinación de una raíz unidimensional (método de Newton)
Una función no lineal tiene múltiples raíces, donde una raíz se define como la intersección de la función con cualquier línea recta. Por lo general, el eje cero de la variable independiente es la línea recta de la cual se desean las raíces. Considere, por ejemplo, un polinomio cúbico, el cual tendrá tres raíces, con una cualquiera o todas reales.
𝑦 = 𝑓(𝑥) = −𝑥3 − 2𝑥2 + 50𝑥 + 60
Figura 2.19 muestra esta función con su grafico en cada rango de x.
En la figura 2.19a se escoge un valor inicial de x1 = 1.8. El algoritmo de Newton evalúa la función con este valor supuesto y se determina y1. El valor de y1 se compara con la tolerancia seleccionada por el usuario (por ejemplo, 0.001) para comprobar si se aproxima lo suficiente a cero y llamar a x1 la raíz. Si no, entonces la pendiente (m) de la función en x1, y1 se calcula con una expresión analítica para la derivada de la función, o con una diferenciación numérica (menos deseable). Luego se evalúa la ecuación de la línea tangente para determinar su intersección en x2, la cual se utiliza como un nuevo valor supuesto. El proceso anterior se repite y se determina y2, el cual se prueba contra la tolerancia seleccionada por el usuario; y, si es demasiado grande se calcula otra línea tangente o una intersección x es usada como nuevo valor supuesto. El proceso se repite hasta que el valor de la función yi con la última xi se aproxima suficientemente a cero para satisfacer al usuario.
El algoritmo de Newton antes descrito puede expresarse de manera algebraica (en pseudocódigo), como se muestra en los siguientes pasos. La función cuyas raíces se buscan es f(x) y su derivada es f ′(x). La pendiente m de la línea tangente es igual a f ′(x) en el punto xiyi.
Paso 1 : 𝑦1 = 𝑓(𝑥1)
Paso 2 : Si 𝑦1 ≤ 𝑡𝑜𝑙𝑒𝑟𝑎𝑛𝑐𝑖𝑎 𝐸𝑁𝑇𝑂𝑁𝐶𝐸𝑆 𝐴𝐿𝑇𝑂
Paso 3 : 𝑚 = 𝑓´(𝑥1)
Paso 4 : 𝑥𝑖+1= 𝑥1 −𝑦𝑖 𝑚
Paso 6 : Si 𝑦𝑖+1≤ 𝑡𝑜𝑙𝑒𝑟𝑎𝑛𝑐𝑖𝑎 𝐸𝑁𝑇𝑂𝑁𝐶𝐸𝑆 𝐴𝐿𝑇𝑂
TAMBIEN 𝑥1 = 𝑥𝑖+1∶ 𝑦𝑖 = 𝑦𝑖+1 IR A paso 1
Si el valor supuesto inicial se aproxima a la raíz, este algoritmo convergerá con rapidez en la solución. Sin embargo, es bastante sensible al valor supuesto inicial. La figura 2.15 (muestra el resultado de un leve cambio de la suposición inicial x1 = 1.8 a x1 = 2.5. Con esta suposición ligeramente diferente converge en otra raíz. Observe también que si se elige un valor inicial de x1 = 3.579, que corresponde a un máximo local de esta función, la línea tangente será horizontal y no intersectará el eje x. El método falla en esta situación.
2.7.2 Determinación de raíces multidimensionales (método de Newton-Raphson) El método de Newton unidimensional es fácil de ampliar a conjuntos de ecuaciones no lineales, múltiples y simultáneas, por ello se denomina método de Newton-Raphson. En primer lugar, se generaliza la expresión desarrollada para el caso unidimensional en el paso 4 de la ecuación anterior.
𝑥𝑖+1 = 𝑥𝑖 −𝑦𝑖
𝑚 𝑜 𝑚(𝑥𝑖+1− 𝑥𝑖) = −𝑦𝑖
Pero:
𝑦𝑖 = 𝑓(𝑥𝑖) 𝑚 = 𝑓´(𝑥𝑖) 𝑥𝑖+1− 𝑥𝑖 = ∆x
Al sustituir:
𝑓´(𝑥𝑖). ∆x = − 𝑓(𝑥𝑖)
[
𝑓1(𝑥1, 𝑥2, 𝑥3, … , 𝑥𝑛 𝑓2(𝑥1, 𝑥2, 𝑥3, … , 𝑥𝑛
⋮ ⋮ 𝑓𝑛(𝑥1, 𝑥2, 𝑥3, … , 𝑥𝑛)
]=B
Donde el conjunto de ecuaciones constituye un vector, llamado B. Se requieren derivadas parciales para obtener los términos de pendiente
[ 𝜕𝑓1 𝜕𝑥1
𝜕𝑓1
𝜕𝑥2 …
𝜕𝑓1 𝜕𝑥𝑛 ⋮ ⋮ ⋮ ⋮ 𝜕𝑓𝑛 𝜕𝑥1 𝜕𝑓𝑛
𝜕𝑥2 …
𝜕𝑓𝑛
𝜕𝑥𝑛] = 𝐴
los cuales forman la matriz Jacobiana del sistema, llamada A. Los términos de error también son un vector, llamado X.
[ ∆𝑥1 ∆𝑥2 ⋮ ∆𝑥𝑛 ]=X
La ecuación de arriba se convierte entonces en una ecuación matricial en el caso multidimensional.
La ecuación puede resolverse para X con una inversión de matriz o con una eliminación Gaussiana. Los valores de los elementos de A y B se calculan para cualquier valor supuesto de las variables. Se puede considerar un criterio de convergencia como la suma de vector de error X en cada iteración, donde la suma se aproxima a cero en una raíz. Se prepara esta solución de Newton-Raphson para el mecanismo de cuatro barras.
2.7.3 Solución de Newton-Raphson para el mecanismo de cuatro barras
𝑓1 = 𝑎𝑐𝑜𝑠𝜃2+ 𝑏𝑐𝑜𝑠𝜃3 − 𝑐𝑐𝑜𝑠𝜃4− 𝑑 = 0 (2.22) 𝑓2 = 𝑎𝑠𝑒𝑛𝜃2+ 𝑏𝑠𝑒𝑛𝜃3− 𝑐𝑠𝑒𝑛𝜃4 = 0 (2.23)
B=[𝑎𝑐𝑜𝑠𝜃2+ 𝑏𝑐𝑜𝑠𝜃3 − 𝑐𝑐𝑜𝑠𝜃4− 𝑑 𝑎𝑠𝑒𝑛𝜃2 + 𝑏𝑠𝑒𝑛𝜃3− 𝑐𝑠𝑒𝑛𝜃4 ]
El vector de error es:
X=[∆𝜃3 ∆𝜃4]
Las derivadas parciales son:
𝐴 =
[ 𝜕𝑓1 𝜕𝜃3
𝜕𝑓1 𝜕𝜃4 𝜕𝑓2 𝜕𝜃3
𝜕𝑓2 𝜕𝜃3]
= [−𝑏𝑠𝑒𝑛𝜃3 𝑐𝑠𝑒𝑛𝜃4 𝑏𝑐𝑜𝑠𝜃3 −𝑐𝑐𝑜𝑠𝜃4]
Esta matriz se conoce como el Jacobiano del sistema; además de su utilidad en este método de solución, también indica algo sobre la resolución del sistema. El sistema de ecuaciones de posición, velocidad y aceleración (en las cuales aparece el Jacobiano) sólo puede resolverse si el valor del determinante del Jacobiano no es cero.
Al sustituir las ecuaciones en la ecuación AX= -B se obtiene:
[−𝑏𝑠𝑒𝑛𝜃3 𝑐𝑠𝑒𝑛𝜃4 𝑏𝑐𝑜𝑠𝜃3 −𝑐𝑐𝑜𝑠𝜃4] [
∆𝜃3
∆𝜃4] = [
𝑎𝑐𝑜𝑠𝜃2+ 𝑏𝑐𝑜𝑠𝜃3 − 𝑐𝑐𝑜𝑠𝜃4− 𝑑
𝑎𝑠𝑒𝑛𝜃2+ 𝑏𝑠𝑒𝑛𝜃3− 𝑐𝑠𝑒𝑛𝜃4 ]
En la síntesis cinemática para la generación de funciones, por lo general es imposible producir con exactitud la función, o bien en la mayoría de los puntos; para ello se utiliza una cantidad mínima de estos puntos, conocidos como puntos de precisión, los cuales se seleccionan para producir el mínimo error entre la función deseada y la función generada. Una forma de seleccionar estos puntos de precisión es a través de la estrategia matemática conocida como espaciamientos de Chebyshev, la cual se define mediante la siguiente ecuación:
𝑥𝑗 = 𝑥0+1
2(𝑥𝑛+1− 𝑥0)(1 − cos (
𝜋(2𝑗 − 1)
2𝑛 ))
Donde j = 1, 2 ,3…, n son los puntos de precisión.
2.8 Análisis algebraico y vectorial de posición del mecanismo de cuatro barras adaptado en una silla de descanso
Figura 2.20 Mecanismo de cuatro barras Se determina la siguiente igualdad a partir a partir de la figura 4.3
𝑟2+ 𝑟3− 𝑟4− 𝑟1 = 0 𝑟1
𝑟4
𝑟3
𝑟2
𝜃4
𝜃2
𝜃3
𝜃1 D
B A
C y
AC=𝑟2 CD=𝑟3
DB=𝑟4
AB=𝑟1
Considerando la siguiente definición de un vector (por Grood & Suntay, 1983)
𝑅 = 𝑟(𝑐𝑜𝑠𝜃𝑖 + 𝑠𝑒𝑛𝜃𝑗 ) (2.24) Se determinan las componentes en x e y.
Teniendo en cuenta que:
sen(180-x)=senx cos(180-x)=-cosx Procedemos a calcular las componentes en x e y.
−𝑟2𝑐𝑜𝑠(180 − 𝜃2𝑖) + 𝑟3cos𝜃3𝑖− 𝑟4cos൫180 − 𝜃4𝑖൯ + 𝑟1cos 𝜃1𝑖 = 0
𝑟2𝑐𝑜𝑠𝜃2𝑖 + 𝑟3cos𝜃3𝑖+ 𝑟4cos 𝜃4𝑖+ 𝑟1cos 𝜃1𝑖 = 0 (2.25)
𝑟2𝑠𝑒𝑛(180 − 𝜃2𝑖) + 𝑟3sen𝜃3𝑖+ 𝑟4sen൫180 − 𝜃4𝑖൯ + 𝑟1sen 𝜃1𝑖 = 0
𝑟2𝑠𝑒𝑛𝜃2𝑖+ 𝑟3sen𝜃3𝑖+ 𝑟4sen 𝜃4𝑖+ 𝑟1sen 𝜃1𝑖 = 0 (2.26)
2.9 Análisis de las posiciones y desplazamientos de las articulaciones A,B,C y D del mecanismo de cuatro barras en la silla de descanso
Según la figura 2.20 para determinar el desplazamiento de las articulaciones: C y D, se fija el eslabón 𝑟1, 𝑦 𝜃1 puede tomar cualquier valor, sin embargo el ángulo 𝜃1 deberá tomar un solo valor. Se establece una relación entre la posición 𝜃2𝑖y la posición 𝜃4𝑖, eliminando 𝜃3𝑖.El subíndice i corresponde a la i ésima posición de precisión que debe cumplir el mecanismo.Considerando la relación de posiciones de los eslabones, se obtienen las siguientes ecuaciones:
𝑟3𝑐𝑜𝑠𝜃3𝑖 = − 𝑟2𝑐𝑜𝑠𝜃2𝑖− 𝑟4𝑐𝑜𝑠𝜃4𝑖−𝑟1𝑐𝑜𝑠𝜃1 (2.27)
𝑟3𝑠𝑒𝑛𝜃3𝑖 = − 𝑟2𝑠𝑒𝑛𝜃2𝑖− 𝑟4𝑠𝑒𝑛𝜃4𝑖−𝑟1𝑠𝑒𝑛𝜃1 (2.28) Con el fin de trabajar con identidades trigonométricas,
𝑟32𝑐𝑜𝑠𝜃3𝑖2 = (− 𝑟2𝑐𝑜𝑠𝜃2𝑖− 𝑟4𝑐𝑜𝑠𝜃4𝑖−𝑟1𝑐𝑜𝑠𝜃1)2 (2.29)
𝑟32𝑠𝑒𝑛𝜃3𝑖2 = (− 𝑟2𝑠𝑒𝑛𝜃2𝑖− 𝑟4𝑠𝑒𝑛𝜃4𝑖−𝑟1𝑠𝑒𝑛𝜃1)2 (2.30)
𝑟32𝑐𝑜𝑠𝜃3𝑖2+ 𝑟32𝑠𝑒𝑛𝜃3𝑖2 = (− 𝑟2𝑐𝑜𝑠𝜃2𝑖− 𝑟4𝑐𝑜𝑠𝜃4𝑖−𝑟1𝑐𝑜𝑠𝜃1)2 +
(− 𝑟2𝑠𝑒𝑛𝜃2𝑖− 𝑟4𝑠𝑒𝑛𝜃4𝑖−𝑟1𝑠𝑒𝑛𝜃1)2 (2.31) Definiendo en el primer término de la ecuación 2.31, 𝑎 = 𝑟4𝑐𝑜𝑠𝜃4𝑖+𝑟1𝑐𝑜𝑠𝜃1 se obtiene la siguiente relación:
𝑟32𝑐𝑜𝑠𝜃3𝑖2+ 𝑟32𝑠𝑒𝑛𝜃
3𝑖2 = (− 𝑟2𝑐𝑜𝑠𝜃2𝑖− 𝑎)2+
(− 𝑟
2𝑠𝑒𝑛𝜃2𝑖− 𝑟4𝑠𝑒𝑛𝜃4𝑖−𝑟1𝑠𝑒𝑛𝜃1)
2 (2.32)
Desarrollando (− 𝑟2𝑐𝑜𝑠𝜃2𝑖− 𝑎)2 ,
(− 𝑟2𝑐𝑜𝑠𝜃2𝑖 − 𝑎)2 = (−(𝑟2𝑐𝑜𝑠𝜃2𝑖+ 𝑎))2 = ( 𝑟2𝑐𝑜𝑠𝜃2𝑖+ 𝑎)2
= 𝑟22𝑐𝑜𝑠𝜃2𝑖2+ 2𝑟2𝑐𝑜𝑠𝜃2𝑖𝑎 + 𝑎2
2𝑟2𝑐𝑜𝑠𝜃2𝑖𝑎 = 2𝑟2𝑐𝑜𝑠𝜃2𝑖 = 2𝑟2𝑐𝑜𝑠𝜃2𝑖𝑟4𝑐𝑜𝑠𝜃4𝑖+ 2𝑟2𝑐𝑜𝑠𝜃2𝑖𝑟1𝑐𝑜𝑠𝜃1
𝑎2 = ൫𝑟4𝑐𝑜𝑠𝜃4𝑖+𝑟1𝑐𝑜𝑠𝜃1൯ 2
= 𝑟42𝑐𝑜𝑠𝜃4𝑖2+ 2𝑟4𝑐𝑜𝑠𝜃4𝑖𝑟1𝑐𝑜𝑠𝜃1 + 𝑟12𝑐𝑜𝑠𝜃12
Definiendo en el segundo término de la ecuación 2.32, 𝑏 = 𝑟4𝑠𝑒𝑛𝜃4𝑖+𝑟1𝑠𝑒𝑛𝜃1 , se obtiene la siguiente relación :
𝑟32𝑐𝑜𝑠𝜃3𝑖2+ 𝑟32𝑠𝑒𝑛𝜃
3𝑖2 = (− 𝑟2𝑐𝑜𝑠𝜃2𝑖− 𝑎)2+ (− 𝑟2𝑠𝑒𝑛𝜃2𝑖− 𝑏)2 (2.33)
(− 𝑟2𝑠𝑒𝑛𝜃2𝑖 − 𝑏)2 = (−(𝑟2𝑠𝑒𝑛𝜃2𝑖 + 𝑏))2 = (𝑟2𝑠𝑒𝑛𝜃2𝑖+ 𝑏)2
(𝑟2𝑠𝑒𝑛𝜃2𝑖+ 𝑏)2 = 𝑟22𝑠𝑒𝑛𝜃2𝑖2+ 2 𝑟2𝑠𝑒𝑛𝜃2𝑖𝑏 + 𝑏2
2 𝑟2𝑠𝑒𝑛𝜃2𝑖𝑏 = 2 𝑟2𝑠𝑒𝑛𝜃2𝑖൫𝑟4𝑠𝑒𝑛𝜃4𝑖+𝑟1𝑠𝑒𝑛𝜃1൯
= 2 𝑟2𝑠𝑒𝑛𝜃2𝑖𝑟4𝑠𝑒𝑛𝜃4𝑖+ 2 𝑟2𝑠𝑒𝑛𝜃2𝑖𝑟1𝑠𝑒𝑛𝜃1
𝑏2= (𝑟
4𝑠𝑒𝑛𝜃4𝑖+𝑟1𝑠𝑒𝑛𝜃1)2 = 𝑟42𝑠𝑒𝑛𝜃4𝑖2+ 2𝑟4𝑠𝑒𝑛𝜃4𝑖𝑟1𝑠𝑒𝑛𝜃1+ 𝑟12𝑠𝑒𝑛𝜃12
Entonces:
𝑟32𝑐𝑜𝑠𝜃3𝑖2+ 𝑟32𝑠𝑒𝑛𝜃3𝑖2 = 𝑟22𝑐𝑜𝑠𝜃2𝑖2+ 2𝑟2𝑐𝑜𝑠𝜃2𝑖𝑟4𝑐𝑜𝑠𝜃4𝑖+
2𝑟2𝑐𝑜𝑠𝜃2𝑖𝑟1𝑐𝑜𝑠𝜃1 + 𝑟42𝑐𝑜𝑠𝜃4𝑖2+ 2𝑟4𝑐𝑜𝑠𝜃4𝑖𝑟1𝑐𝑜𝑠𝜃1+
𝑟12𝑐𝑜𝑠𝜃12+ 𝑟22𝑠𝑒𝑛𝜃2𝑖2+ 2 𝑟2𝑠𝑒𝑛𝜃2𝑖𝑟4𝑠𝑒𝑛𝜃4𝑖+
2 𝑟2𝑠𝑒𝑛𝜃2𝑖𝑟1𝑠𝑒𝑛𝜃1+ 𝑟42𝑠𝑒𝑛𝜃4𝑖2+
2𝑟4𝑠𝑒𝑛𝜃4𝑖𝑟1𝑠𝑒𝑛𝜃1 + 𝑟12𝑠𝑒𝑛𝜃