CAPITULO 5
MODELAJE DEL TRANSISTOR BIPOLAR
(BJT)
5.1.
Introducción
En este capítulo se analiza el modelo de transistor bipolar elaborando inicialmente un modelo de pequeña señal en baja frecuencia basado en el desarrollo de la característica voltampérica exponencial del BJT y observando qué niveles de señal de entrada son lo suficientemente pequeños como para poder linealizar dicha característica.
Este modelo de pequeña señal es útil cuando se trabaja el BJT en región activa, como amplificador y permite construir un modelo con parámetros de cuadripolo y ecuaciones simples en su diseño.
Se completa este modelo agregándole componentes que explican la variación de la ganancia con la frecuencia y la realimentación interna que se observa en altas frecuencias.
Se estudia también el modelo GummelPoon usado en Spice tanto para señal débil como para señal fuerte.
Para la obtención del modelo aproximado de este dispositivo se sugiere consultar los libros de Kielkowski y de AntognettiMassobrio11.
11 KIELKOWSKI, Ron M. Spice: Practical device modeling. New York: McGrawHill, 1995. p. 103150.
ANTOGNETTI, Paolo and MASSOBRIO, Giuseppe. Semiconductor device modeling with Spice. Singapore:
5.2.
Modelo de señal débil del BJT
En esta sección se desarrolla de manera cualitativa el modelo de pequeña señal del BJT.
5.2.1.
Amplificadores de señal débil
Un amplificador es de señal débil si:
La señal de entrada es lo suficientemente pequeña tal que se pueda trabajar en la parte lineal de la característica del dispositivo activo y usar, en el diseño, el modelo lineal y parámetros de cuadripolo.
La señal de salida es directamente proporcional a la señal de entrada. (Proporcional en forma lineal).
En la figura 5.1 se muestra el circuito típico de amplificador a BJT.
Figura 5.1. Amplificador que usa BJT.
Se supone en este circuito que las reactancias xcb y xce son pequeñas (idealmente cero). El circuito será de banda ancha si la impedancia de carga ZL es resistiva pura y será de banda estrecha si ZL es un circuito sintonizado.
L
Z cc
V
cb
X
ce
Para establecer el rango de pequeña señal y crear un modelo aproximado de los dispositivos activos (𝐵𝐽𝑇, 𝐹𝐸𝑇, etc.) se asume un voltaje de entrada de la forma:
t V V tvi b 1coso
Con:
b
V : Voltaje de polarización 𝐷𝐶 a la entrada.
1
V : Amplitud pico del tono de prueba.
o
: Frecuencia angular del tono de prueba.
5.2.2.
Modelo del transistor bipolar en señal débil
El transistor bipolar se puede considerar como un dispositivo manejado por voltaje (𝑉𝐷𝐷), mostrado en la figura 5.3o manejado por corriente (𝐶𝐷𝐷), mostrado en la figura 5.5, así:
𝑉𝐷𝐷:
La característica voltampérica del 𝐵𝐽𝑇 se muestra en la figura 5.2 y está dada por:
k T t v q i
e I t
I
ES
E
Con:
tIE : Corriente de emisor.
tIES : Corriente de emisor de saturación.
C 10 602 .
1 19
q
K J 10 38 .
1 23
k
T : Temperatura en grados Kelvin,
K . K300 a mV 26
Figura 5.2. Característica de transferencia del BJT como VDD.
Figura 5.3. Modelo simple del BJT.
𝐶𝐷𝐷:
En este caso, la relación de transferencia mostrada en la figura 5.4está dada por:
t
I tIE o 1 b
Con:
tIb : Corriente de base.
o
: Ganancia de corriente de 𝐷𝐶.
Figura 5.4. Característica de transferencia del 𝐵𝐽𝑇 como 𝐶𝐷𝐷.
tvi
tIE
tIE
tvi
tIE
tFigura 5.5. Modelo simple del BJT.
Para el modelo de la figura 5.3y con el voltaje de entrada planteado, se tiene:
kT tq T k q
e e
I t
I b
o cos V
V 1
ES E
x tpe
I t
IE cos o
T k b q
p I e
I
V
ES
T k
V q
x 1
x: amplitud normalizada del tono de prueba con respecto al voltaje térmico.
Esta es una función periódica que se puede expandir en series de Fourier, así:
0 E
0
cos
n n
t n C
t
I
n
C : Amplitud de los armónicos de la corriente de emisor.
x I I d e ICo p x p o
2 1 cos
IDC
x I I d n e ICn p x cos 2 p n
2 2
cos
Con:
xIn : Función modificada de Bessel de orden 𝑛 y argumento 𝑥.
Luego:
I x n t
x I I t I o n o n cos 2 1 1 DC E
Se tiene, entonces, una corriente 𝐷𝐶 e infinitos armónicos con amplitudes
n
po n I x I x I I x I x
Cn 2 DC 2
La figura 5.6muestra la amplitud de las primeras componentes en función del voltaje normalizado de entrada.
Figura 5.6. Amplitud de armónicos vs argumento x.
0 2 4 6 8 1 0
0 1 2
n = 1 n = 2 n = 3
A m pl itu d d e ar m ón ic o s
C 1( )x
C 2( )x
C 3( )x
La figura 5.7muestra la amplitud de los tres primeros componentes de la corriente en función de la frecuencia, para un voltaje normalizado de 1.
Figura 5.7. Amplitud de armónicos vs frecuencia con argumento x1.
Para pequeños valores de x las funciones de Bessel cumplen lo siguiente:
x 1Io
2
1
x x
I
41
2 x
x I
x I
x 0 n1In
Si se quiere amplificación lineal sin distorsión se deberá escoger apropiadamente la amplitud de la señal de entrada y esto dependerá del tipo de amplificador:
Amplificador de banda ancha:
En este caso se permite pasar a la salida a todos los armónicos, y si se quiere distorsión por segundo armónico por debajo del 2.5%, la curva de 𝐼2(𝑥) 𝐼⁄1(𝑥) indica que 𝑥 debe ser menor a 0.1 ya que 𝐼2(𝑥) 𝐼⁄1(𝑥)≅ 𝑥 4⁄ . Es decir, x42.5%0.1
1 106 0 1 106 2 106 3 106 4 106 5 106 6 106
0 0.5 1 1.5 2
frecuencia (Hz)
A
m
pl
it
ud
de
a
rm
ón
ic
os
C(m n 1, , )
O sea voltajes de entrada menores a 2.6 𝑚𝑉 a 300 𝐾. Amplificador de banda estrecha:
En este caso los armónicos son eliminados por el circuito resonante y, según la figura 5.4, se tiene una relación lineal para la fundamental si x es menor o igual a 1, o sea si V1 es menor o igual a 26mVa300K.
Cuando x vale 1 hay una variación de la linealidad del 11%.
En ambos casos, si V1 es pequeño se tiene:
t I
x t
IE DC 1 coso
t kT
V I q
I DC 1 cos o
DC
t V
g
IDC m 1coso
O sea:
kT qI
g DC
m
m
g : Transconductancia de señal débil.
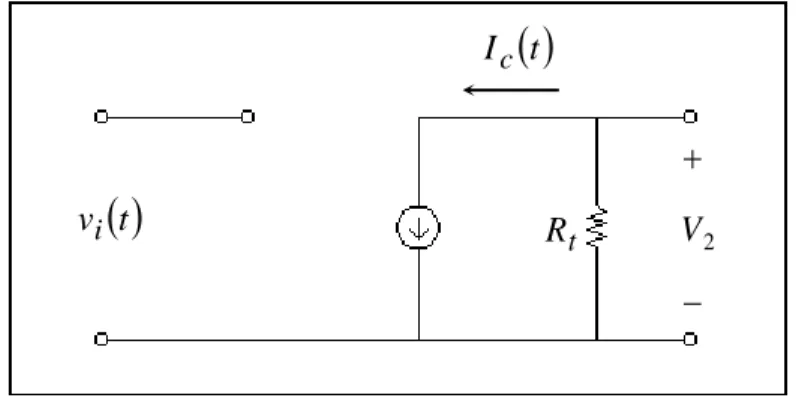
Esto conduce al modelo de la figura 5.8(sin tener en cuenta la corriente DC).
Figura 5.8. Modelo simple del BJT
tIc
tvi
t
R
2
El voltaje de salida:
t R I
tv2 t c
t V
g
Rt m 1coso
t
R : Resistencia de carga o resistencia equivalente del circuito sintonizado en resonancia.
Con la transconductancia de pequeña señal dada por:
b V i m
dv dI g E
La ganancia de voltaje:
t m
v g R
A
De aquí se concluye que la ganancia se puede controlar variando IDC.
Si se aplica señal grande al dispositivo activo con una carga sintonizada, se habla de una transconductancia de señal fuerte Gm
x :
x I
x I V I V
I x G
o m
2
1
1 DC
1
1
xI x
x I kT
I q
o 2 DC 1
2
1
x xI
x I g
o m
En donde:
1
I : Amplitud de la corriente fundamental.
1
xI1 : Coeficiente de Bessel de orden 1.
xI0 : Coeficiente de Bessel de orden 0.
El voltaje de salida:
t G
x V R tv2 m 1 t coso
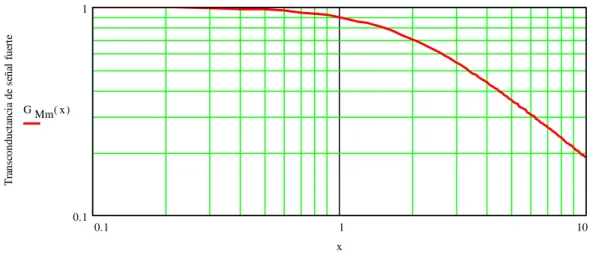
La transconductancia de señal fuerte normalizada:
m m
g x G x
GMm ( )
La figura 5.9 muestra la variación de ésta en función de la amplitud de la señal de entrada normalizada.
Figura 5.9. Variación de la transconductancia normalizada con x.
De la figura 5.9se deduce que la ganancia se reduce al aumentar la señal de entrada, lo cual es útil cuando se desea un mecanismo para estabilización de la amplitud, por ejemplo en osciladores de onda senoidal.
El modelo de pequeña señal se construye ignorando la polarización y los efectos no lineales o sea que se asume operación lineal. Se puede construir a partir del modelo físico o, de manera aproximada, a partir del comportamiento en baja frecuencia:
0.1 1 10
0.1 1
T
ra
ns
conduc
ta
nc
ia
de
s
eña
l
fue
rt
e
G Mm( )x
t g v
tIE m s 𝑉𝐷𝐷
t
I tIE 0 1 b 𝐶𝐷𝐷
tIE : Corriente de emisor.
tIb : Corriente de base.
tvs : Señal de entrada.
La resistencia de entrada Rin está dada por:
tI t v R
b s n
i
m o
g
1
o1
re
e
r : Resistencia dinámica de emisor.
mA 26DC
DC I
I q
T k
re a 300K
El modelo de baja frecuencia queda como muestra la figura 5.10:
Figura 5.10 Modelo de baja frecuencia y señal débil del BJT.
En este caso se asume resistencia de salida infinita (fuente de corriente ideal).
t Ib
t I
tIc o b
t Ic
t Ibe r
o1
reE E
B
B
Un modelo, un poco más aproximado, toma en cuenta que la ganancia de corriente decrece con la frecuencia, como se muestra en la figura 5.11.
Figura 5.11. Ganancia vs frecuencia.
Se observa en esta figura que hay una frecuencia de transición
f en donde la ganancia ha caído 3 𝑑𝐵, o sea
2 o
.
En este punto la impedancia de entrada ya no es resistiva sino que hay un desfase entre la corriente y el voltaje.
En la misma figura se aprecia que por encima de f la ganancia decrece linealmente con la frecuencia unos 6 dB octava
20dB década
, hasta que, en la frecuencia de corteT
f ,
se hace igual a 1
0dB
.Un modelo que explica este comportamiento, es el de la figura 5.12. En esta figura se tiene que:
1 1
1
C j r
C j i
i
e o
b
1 i ic o
1 106 1 107 1 108 1 109 1 1010
20 0 20 40
frecuencia (Hz)
G
ana
nc
ia
(
dB
)
( )f
ib
1
e o
o
r C
j
C : Capacitancia baseemisor.
Figura 5.12. Modelo del BJT para justificar el cambio de ganancia con la frecuencia.
En la frecuencia de transición, f :
2 o
1
2 2 2 2 2
2 2
e o
o o
r C
2 1o22 C2 ro2
De tal manera que: 1
0
C re
Entonces, en f la reactancia del condensador es igual a la resistencia o re. De forma equivalente:
e o r
1
i b
i
C ic
B C
1
e oC r
En la frecuencia de corte, fT:
1 1
o2 2 2 e2
o
r C T
2 2 2 2 2
1 o e
o T C r
O sea:
2 2 2
1T C re
e
r C
T 1
Es decir:
o
T
o
f fT
Por lo tanto la frecuencia de corte es igual al producto de la ganancia por el ancho de banda.
Un modelo más completo, llamado modelo híbrido 𝑃𝐼 y mostrado en la figura 5.13,
asume fuente de corriente no ideal y una realimentación creciente con la frecuencia.
En este modelo:
mA 26FE
e e o
I h r
R
e m
m
r g
C g C
T T T
1
bb
FE
h : Ganancia de corriente en 𝐷𝐶.
Figura 5.13. Modelo Híbrido PI.
5.3.
Modelo del BJT en Spice
En Spice se usa un modelo de 𝐵𝐽𝑇 llamado modelo GummelPoon que es una extensión del
modelo EbersMoll, el cual consiste en un par de junturas 𝑃𝑁 que interactúan entre sí tal como se muestra en la figura 5.14.
Figura 5.14 Modelo del BJT usado en Spice.
C
B
E
C
r rce
r
C bb
r
be mV
g
5.3.1.
Parámetros del transistor bipolar
El modelo en Spice está descrito por 40 parámetros que son definidos en la tabla 1. De los cuales los 18 primeros describen la característica voltampérica 𝐷𝐶 de ambas junturas, tanto de polarización directa como inversa.
Polarización directa en un 𝐵𝐽𝑇 𝑁𝑃𝑁 significa que el colector está a un potencial mayor que el de la base y ésta a su vez a un potencial mayor que el de emisor. La polarización inversa significa que el emisor está a un potencial mayor que el de la base y ésta a su vez a un potencial mayor que el colector.
De los 18, 6 representan los parámetros “inversos” del 𝐵𝐽𝑇 que son equivalentes a sus correspondientes parámetros directos sólo para voltajes inversos y se usan sólo cuando el transistor es trabajado en la región inversa de operación. Las regiones de operación directa e inversa se muestran en la figura 5.15.
Figura 5.15. Regiones de operación directa e inversa.
Los 17 parámetros siguientes, describen las características capacitivas del modelo. 𝑇𝐹,
𝑇𝑅 y 𝑋𝑇𝐹 se usan para modelar el tiempo de recuperación inversa del transistor.
Los parámetros 𝐸𝐺, 𝑋𝑇𝐼, 𝑋𝑇𝐵 modelan los cambios dependientes de la temperatura en la corriente y la ganancia de corriente del 𝐵𝐽𝑇; se usan sólo durante barridos de temperatura o análisis a diferentes temperaturas. 𝐾𝐹 y 𝐴𝐹 modelan el ruido Flicker del dispositivo (𝐾𝐹
y 𝐴𝐹 son usados sólo en el análisis de ruido 𝐴𝐶). inversa
Operación
directa Operación
c
I
Tabla 1. Parámetros del modelo del transistor bipolar.
Parámetros Descripción Unidades Default
Parámetros DC
𝑰𝑺 Corriente de saturación A 1𝐸16
𝑩𝑭 Ganancia de corriente directa máxima ideal 100
𝑩𝑹 Ganancia de corriente inversa máxima ideal 1
𝑵𝑭 Coeficiente de emisión de corriente directa 1 𝑵𝑹 Coeficiente de emisión de corriente inversa 1
𝑰𝑺𝑬 Corriente de saturación baseemisor A 0
𝑰𝑺𝑪 Corriente de saturación basecolector A 0
𝑰𝑲𝑭 Corriente de alta inyección A
𝑰𝑲𝑹 Corriente inversa máxima A
𝑵𝑬 Coeficiente de emisión baseemisor 1.5
𝑵𝑪 Coeficiente de emisión basecolector 2.0
𝑽𝑨𝑭 Voltaje directo Early V
𝑽𝑨𝑹 Voltaje inverso Early V
𝑹𝑪 Resistencia del colector 0
𝑹𝑬 Resistencia del emisor 0
𝑹𝑩 Resistencia de la base sin polarizar 0
𝑹𝑩𝑴 Resistencia mínima de la base 𝑅𝐵
Tabla 1 (Continuación). Parámetros del modelo del transistor bipolar.
Parámetros Descripción Unidades Default
Parámetros de Capacitancia
𝑪𝑱𝑬 Capacitancia de la juntura baseemisor sin polarizar 𝐹 0
𝑴𝑱𝑬 Coeficiente de graduación de la juntura baseemisor 0.33
𝑽𝑱𝑬 Potencial baseemisor 𝑉 0.75
𝑪𝑱𝑪 Capacitancia de la juntura basecolector sin polarizar 𝐹 0
𝑴𝑱𝑪 Coeficiente de graduación de la juntura basecolector 0.33
𝑽𝑱𝑪 Potencial basecolector 𝑉 0.75
𝑪𝑱𝑺 Capacitancia de la juntura colectorsustrato (cs) sin polarizar
𝐹 0
𝑴𝑱𝑺 Coeficiente de graduación de la juntura cs 0.33
𝑽𝑱𝑺 Potencial colectorsustrato 𝑉 0.75
𝑿𝑪𝑱𝑪 Fracción de la capacitancia basecolector conectada
internamente a RB
1
𝑭𝑪 Coeficiente de la capacitancia de deplexión polarizada
directamente 0.5
𝑻𝑭 Tiempo de tránsito directo ideal. s 0 𝑻𝑹 Tiempo de tránsito inverso ideal. s 0
𝑿𝑻𝑭 Coeficiente para la dependencia de la polarización de
TF 0
𝑽𝑻𝑭 Voltaje que describe la dependencia de TF de Vbc 𝑉
𝑷𝑻𝑭 Fase en exceso para f 1
2TF
Grados 0Tabla 1 (Continuación). Parámetros del modelo del transistor bipolar.
Parámetros Descripción Unidades Default
Parámetros de Temperatura
𝑿𝑻𝑩 Coeficiente de temperatura para beta 0
𝑿𝑻𝑰 Coeficiente de temperatura para IS 3
𝑬𝑮 Gap de energía para temperatura efectiva 𝑒𝑉 1.11
Parámetros de Ruido
𝑲𝑭 Coeficiente de ruido Flicker 0
𝑨𝑭 Exponente de ruido Flicker 1
Otros parámetros del modelo del transistor bipolar en Spice se presentan en la tabla 2.
Tabla 2. Parámetros del modelo del transistor bipolar.
Parámetro Descripción Unidades Default
𝑵𝑲 Coeficiente de alta corriente (rolloff) 0.5
𝑰𝑺𝑺 Corriente de saturación de la juntura del sustrato 𝐴 0 𝑵𝑺 Coeficiente de emisión de la juntura del sustrato 1
𝑸𝑪𝑶 Factor de carga de la región epitaxial 𝐶 0
𝑹𝑪𝑶 Resistencia de la región epitaxial 0
𝑽𝑶 Voltaje de codo móvil 𝑉 10
𝑮𝑨𝑴𝑴𝑨 Factor de la región epitaxial 1𝐸11
𝑻𝑹𝑬𝟏 Coeficiente lineal de temperatura para 𝑅𝐸 1
C
𝑻𝑹𝑬𝟐 Coeficiente cuadrático de temperatura para RE 2
C
0
Tabla 2 (Continuación). Parámetros del modelo del transistor bipolar.
𝑻𝑹𝑩𝟏 Coeficiente lineal de temperatura para 𝑅𝐵 1
C
0
𝑻𝑹𝑩𝟐 Coeficiente cuadrático de temperatura para 𝑅𝐵 2
C
0
𝑻𝑹𝑴𝟏 Coeficiente lineal de temperatura para 𝑅𝐵𝑀 1
C
0
𝑻𝑹𝑴𝟐 Coeficiente cuadrático de temperatura de 𝑅𝐵𝑀 2
C
0
𝑻𝑹𝑪𝟏 Coeficiente lineal de temperatura para 𝑅𝐶 1
C
0
𝑻𝑹𝑪𝟐 Coeficiente cuadrático de temperatura para 𝑅𝐶 2
C
0
5.3.2.
Parámetros DC del transistor bipolar
Los parámetros 𝐷𝐶 fundamentales del modelo bipolar son 𝐼𝑆, 𝑁𝐹 𝑦 𝐵𝐹, y constituyen la base de todo el modelo. Para entender estos parámetros es necesario observar las ecuaciones de corriente de colector y base mostradas a continuación.
1
IS
NF
T k q
c
be
V
e I
FE
BF , BF
I h
Ib c
Donde:
c
I : Corriente de colector.
b
I : Corriente de base.
q: Carga del electrón, q 1.6022E19C
k: Constante de Boltzmann, k 1.3806E23 J K
T : Temperatura del diodo en grados Kelvin.
FE
Como es de esperar de la figura 5.14(a) o 5.14 (b), la corriente de colector es básicamente una función exponencial del voltaje baseemisor y la ecuación dada para Ic es necesariamente idéntica a la expresión de la corriente del diodo. 𝐵𝐹 define la razón de corrientes de colector y base.
El voltaje Early 𝑉𝐴𝐹 (y 𝑉𝐴𝑅 de operación inversa) modela el efecto de la modulación de la anchura de base del transistor. Esta modulación ocasiona que la conductancia de salida sea menor que cero en la región de operación lineal. El voltaje Early es siempre un número positivo.
RC, RB y RE modelan la resistencia óhmica de la región activa a los terminales de colector, base y emisor respectivamente.
La resistencia de colector RC se asume constante en el modelo pero en realidad presenta dependencia de la corriente de colector y del voltaje basecolector y limita la capacidad de manejo de corriente del 𝐵𝐽𝑇.
La resistencia de base RB afecta enormemente la respuesta de pequeña señal y transiente, presenta dependencia del punto de operación y es difícil de medir. RB se divide en dos: rb (resistencia extrínseca) o resistencia de contacto y la resistencia de la región interna de base (base activa) RBM (resistencia intrínseca), la cual depende de la corriente de base.
La resistencia de emisor RE es usualmente baja ya que el emisor normalmente es dopado con una alta concentración de impurezas. La resistencia de emisor es un parámetro importante para modelar los dispositivos bipolares porque el producto de la corriente de colector (o emisor) por la RE genera un voltaje que se opone al voltaje normal Vbe.
Figura 5.16. Variación típica de la ganancia de corriente directa con la corriente de colector.
5.3.3.
Parámetros de capacitancia y AC bipolares
De los parámetros de capacitancia de la tabla 1, los 10 primeros describen la capacitancia de juntura baseemisor, basecolector, y para transistores de circuito integrado, la juntura colectorsustrato.
𝑇𝐹 es usado para modelar la carga en exceso almacenada en la región de la base cuando la juntura baseemisor está directamente polarizada; se emplea para modelar el transistor en suicheo.
El parámetro inverso de 𝑇𝐹 es 𝑇𝑅. 𝑇𝑅 modela la carga en exceso en la región basecolector cuando la juntura basecolector es polarizada directamente; esta condición implica operación inversa del transistor y, por esta razón, 𝑇𝑅 es importante sólo para un dispositivo trabajado en operación inversa.
Modelo de señal fuerte:
El modelo de señal fuerte del 𝐵𝐽𝑇 se muestra en la figura 5.17.
Las capacitancias CBE y CBC (o elementos no lineales de almacenaje de carga QBE y BC
Q respectivamente) son el resultado de considerar el almacenamiento de carga en las junturas del 𝐵𝐽𝑇 debido a las capacitancias asociadas a los tiempos de tránsito en la difusión
L
I IFK
BFM BF
c
I
bajas Corrientes
medias Corrientes
y a los retardos en las regiones de base y emisor. Estas capacitancias presentan dependencia del voltaje y están determinadas por:
BE BE BE
dV dQ
C
BC BC BC
dV dQ
C
Debido a la naturaleza distribuida de la resistencia de base, la capacitancia de juntura basecolector se divide en dos partes: una entre la base interna y el colector CJCXCJC y otra
entre la terminal externa de la base y el colector CJX
1XCJC
CJC.Figura 5.17. Modelo de señal fuerte del BJT
En el cálculo usado en Spice para este modelo de señal grande se tienen en cuenta otros dos factores adicionales: modulación del tiempo de tránsito (transit charge) y la fase en exceso.
La modulación del tiempo de tránsito consiste en que en altas corrientes el tiempo de tránsito del emisor al colector (y por tanto la frecuencia fT) no es constante y es función de
CE
V JX
C
VBC
CS C B
B r
BE
C
BE
V
RC
B
I
RE
B
E E B
C I BC C
C
c
I y VCE. En la siguiente ecuación empírica se hace uso de los parámetros XTF, VTF e
ITF para modelar este comportamiento:
2
ITF XTF
1
1.44VTF
cc cc V
I I
ATF
e
BCEsta ecuación multiplica a TF en las ecuaciones de carga.
XTF, VTF e ITF modifican el producto gananciaancho de banda, fT, así:
TFF fT
2 1
En donde:
ATF TFFTF
La fase en exceso se modela con el parámetro PTF y consiste fundamentalmente en que el desfase en la corriente en dispositivos reales siempre es mayor que el predicho por el modelo. Este desfase adicional está dado por:
2 2 0 0
3 3 arctan
Con:
TF 1
TF PTF
1
0
Modelo de pequeña señal:
Figura 5.18. Modelo de pequeña señal del BJT
Se desarrolla al linealizar las características no lineales del 𝐵𝐽𝑇, alrededor del punto de operación y para variaciones pequeñas del voltaje y la corriente, haciendo un desarrollo en series de Taylor y reteniendo los términos de primer orden.
kT qI dV
dI
gm c c
BE r g dV dI g m BE B 1 BF o m c o r q kT g dV dI g BC 1 VA r g dV dI g o BC B 1 BF RB 1 x g Con: kT qV c BE
e
I ISVA: Voltaje Early.
JX C
V
JS C B B r g V V
gmF mR
m
g : Transconductancia.
Las capacitancias se obtienen de manera similar al linealizar las expresiones de las capacitancias no lineales.
BEJE F BE BE V C g dV dQ
C TF m
BCJC R BC
BC g C V
dV dQ
C TR m
Donde:
BE
Q y QBC: Elementos de almacenamiento de carga. F
m
g : Transconductancia directa.
R m
g : Transconductancia inversa.
La capacitancia distribuida basecolector, CJX, tiene en cuenta la resistencia distribuida de la región de base.
CJC
JC
JX C X
C 1
5.3.4.
Ecuaciones de temperatura
Los parámetros del transistor bipolar presentan dependencia con respecto a la temperatura, la cual se puede apreciar en las siguientes ecuaciones.
XT Inom EG 1 nom IS IS T T e T T V T T
NE
NC XT I nom NC EG 1 nom XT B nom ISC ISC T T e T T T T V T T
NSXT I nom NS EG 1 nom XT B nom ISS ISS T T e T T T T V T T
XT Bnom BF BF T T T
XT Bnom BR BR T T T
RE
1 T
T
RET RE1 T Tnom RE2 T Tnom2
RB
1 T
T
RBT RB1 T Tnom RB2 T Tnom 2
RBM
1 T
T
RBM T RM1 T Tnom RM2 T Tnom 2
RC
1 T
T
RCT RC1 T Tnom RC2 T Tnom 2
TT T T T T T T
T VJE 3 V ln EG EG
VJE
nom nom
nom nom
T
TT T T T T T T
T VJC 3 V ln EG EG
VJC
nom nom
nom nom
T
TT T T T T T T
T VJS 3 V ln EG EG
VJS
nom nom
nom nom
T
VJE VJE 1 0004 . 0 MJE 1 CJE
VJC VJC 1 0004 . 0 MJC 1 CJCCJCT T Tnom T
VJS VJS 1 0004 . 0 MJS 1 CJSCJST T Tnom T
Las resistencias parásitas de colector, base y emisor no tienen dependencia de la temperatura.
En las ecuaciones anteriores aparecen los términos:
nom
T : Temperatura nominal (300 𝐾).
𝑇: Temperatura de realización de los análisis en 𝐾.
T
V : Voltaje térmico,
q T k VT
k: Constante de Boltzmann, k 1.3806E23J K
q: Carga del electrón, q 1.6022E19C
1108 000702 . 0 16 . 1 EG 2 T T T5.3.5.
Ecuaciones de ruido
El ruido se calcula para un ancho de banda de 1 𝐻𝑧.
El término 𝐴𝑅𝐸𝐴 es un factor multiplicador utilizado en Spice para establecer el número de transistores equivalentes en paralelo (para un modelo en concreto). Los parámetros del modelo a los que afecta este factor son 𝐼𝑆, 𝐼𝑆𝐸, 𝐼𝑆𝐶, 𝐼𝐾𝐹, 𝐼𝐾𝑅, 𝐼𝑅𝐹, 𝐼𝑅𝐵,𝑅𝐵, 𝑅𝐵𝑀, 𝑅𝐸, 𝑅𝐶, 𝐶𝐽𝐸, 𝐶𝐽𝐶 𝑦 𝐶𝐽𝑆. El valor predeterminado del parámetro 𝐴𝑅𝐸𝐴 es 1.
AREA RC 4
2 kT
Ic
AREA RB 4
2 kT
Ib
AREA RE 4
2 kT
Ie
Las corrientes de base y colector generan ruido Shot y ruido Flicker:
FRECUENCIA KF 2
AF
2 b
b b
I I
q
I
FRECUENCIA KF 2
AF
2 c
c c
I I
q
BIBLIOGRAFIA
ANTOGNETTI, Paolo and MASSOBRIO, Giuseppe. Semiconductor device modeling with Spice. Singapore: McGrawHill, 1988. p. 37116.
CLARKE, Kenneth K. and HESS, Donald T. Communication circuits: Analysis and design. United States of America: AddisonWesley publishing company, 1971. p.90148.
GUTIERREZ, P. M. et al. Simulación de circuitos mediante PSpice/2: Modelos que utiliza el simulador PSpice para emular el funcionamiento de los principales componentes y dispositivos. En: Revista española de electrónica. (jul.Ago. 1994); p. 4652.
HAYWARD, W. H. Introduction to radio frequency design. New Jersey: PrenticeHall, 1982. p. 131.
KIELKOWSKI, Ron M. Spice: Practical device modeling. New York: McGrawHill, 1995. p. 103150.