IN“TITUTO POLITÉCNICO NACIONAL
E“CUELA “UPERIOR DE INGENIERÍA MECÁNICA Y ELECTRICA UNIDAD PROFE“IONAL ADOLFO LÓPEZ MATEO“
“UPERVI“IÓN Y EVALUACIÓN DEL “I“TEMA DE CONTROL
DE NIVEL PARA UN TANQUE ATMO“FÉRICO
TE“INA
QUE PARA OBTENER EL TITULO DE
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
PRE“ENTAN:
JAVIER MANUEL ALTAMIRA VARGA“
JO“UE CRI“TIAN RAMIREZ RODRIGUEZ
A“E“ORE“:
M. EN C. “ALVADOR CRUZ DEL CAMINO
ING. RICARDO HURTADO RANGEL
DEDICATORIA
Esta tesis de la dedico a mi Dios quien supo guiarme por el buen camino, darme
fuerza para seguir adelante y no desmayar en los problemas que se presentaban,
enseñándome a encarar las adversidades sin perder nunca la dignidad ni desfallecer
en el intento.
A mis padres y hermanos por su apoyo y confianza en todo lo necesario para
cumplir mis objetivos como persona y estudiante.
A mi padre por brindarme los recursos necesarios y estar a mi lado apoyándome y
aconsejándome siempre.
A mi madre por hacer de mí una mejor persona a través de sus consejos,
enseñanzas y amor.
A mis hermanos por estar siempre presentes, acompañándome.
Con cariño,
INDICE
INDICE ... 7
1 INTRODUCCION ... 9
1.1 ANTECEDENTES ... 9
1.2 OBJETIVO ... 11
1.3 ESTADO DEL ARTE ... 11
1.4 JUSTIFICACION ... 14
1.5 ALCANCES ... 16
2 DESCRIPCION DEL CONTROL Y EL SISTEMA DE NIVEL ... 17
2.1 FUNCIONAMIENTO DE LA PLANTA ... 17
2.2 DESCRIPCIÓN DE LA PLANTA ... 19
2.2.1 MEDIDOR DE NIVEL ... 19
2.2.2 ROTAMETRO ... 19
2.2.3 TANQUE ... 20
2.2.4 BOMBA CENTRIFUGA ... 21
2.2.5 CONTROLADOR UNIVERSAL ... 21
2.2.6 NIVEL ... 22
2.2.7 FLUJO ... 23
2.2.8 FUENTE ELECTRICA ... 24
2.2.8 VÁLVULAS TIPO DIAFRAGMA (servo válvula) ... 25
2.3 MODULO DE ADQUISICIÓN ... 26
2.3.1 DIAGRAMA DE CONEXIONES ... 28
2.3.2 CONEXIÓN DE ENTRADAS ANALÓGICAS ... 29
2.3.3 CARACTERÍSTICAS DE CONEXIÓN ... 29
2.3.4 COMUNICACIÓN SERIE DIGITAL ... 29
2.3.5 DESCRIPCIÓN FRONTAL ... 29
2.4 PROASIS DAS WIN 3.0 ... 30
2.5 CONTROL DE NIVEL ... 34
2.5.1 OBTENCION DE LA GANANCIA ... 37
3 PROTOCOLOS DE COMUNICACIÓN ... 40
3.1 INTRODUCCIÓN ... 40
3.2 MÉTODOS DE TRANSMISIÓN ... 41
3.2.1 MODO DE CARÁCTER ... 42
3.2.2 MODO DE BLOQUE ... 42
3.3 MODOS DE TRANSMISIÓN ... 43
3.3.1 SIMPLEX (SX) ... 43
3.3.2 HALF DUPLEX (HDX) ... 43
3.3.3 FULL DUPLEX (FDX) ... 44
3.4 PROPIEDADES DE LOS PROTOCOLOS ... 46
3.5 CLASIFICACIÓN DE LOS PROTOCOLOS ... 47
3.5.1 PROTOCOLOS ASÍNCRONOS ... 47
3.5.2 PROTOCOLOS SÍNCRONOS ... 48
3.5.3 MODBUS ... 49
3.5.5 MODO ASCII ... 52
3.5.6 MODO RTU ... 53
4 DESARROLLO DEL SOFTWARE ... 58
5 EVALUACION TECNICA Y ECONOMICA ... 58
6 CONCLUSIONES ... 60
7 REFERENCIAS ... 61
1 INTRODUCCION
1.1 ANTECEDENTES
En la actualidad, la automatización de procesos industriales es un área de gran
trabajo e investigación. Ante esta rápida y progresiva informatización y
automatización, la industria requiere cada vez más de personal con competencia
profesional en estos ámbitos, los alumnos deben tener el conocimiento de la
situación tecnológica actual que les permita integrarse sin dificultad en el mundo
industrial, y además deben ser capaces de adaptarse a los nuevos cambios que se
producen en el sector de la Tecnología Industrial más afín a los ingenieros.
El control y la automatización en la industria están evolucionando al ritmo que las
nuevas tecnologías imponen. Así, desde los primeros reguladores de tipo mecánico
hasta el electrónico, se están desarrollando conceptos basados en tecnologías
(Software) para monitorear el comportamiento de los procesos industriales, que
ofrecen nuevas posibilidades de resolver y optimizar los procesos en la actividad
industrial.
Es por esto que en este trabajo se propone el software de control y supervisión el
cual consta de un conjunto de procesos que forman parte de una actividad
industrial; dichos procesos se regulan utilizando una amplia gama de dispositivos
que pueden realizar su trabajo de forma autónoma o bien formar parte de un
sistema de control y supervisión que se comunica con él y que, en ocasiones, puede
modificar su comportamiento y programación.
Para el control de los procesos productivos industriales se han puesto en boga los
sistemas de control supervisorio con adquisición de datos, también conocidos por
sus siglas inglesas como SCADA (Software Control And Data Adquisition). Se trata
de un sistema que permite controlar y monitorear desde un centro de control los
procesos de estaciones remotas distantes, empleando diversos tipos de enlaces de
Estos sistemas “permiten un gobierno total de la planta aunando las ventajas de
seguridad de autómatas industriales y el control y gestión mediante computadoras
que permiten interfaces gráficas muy amigables e intuitivas para el operario.”
El monitoreo y control de procesos industriales poseen características distintivas,
muchas de ellas críticas, que impactan fuertemente en la comunicación que se debe
propiciar. La incorporación de nuevas tecnologías en los sistemas de control y los
avances en las tecnologías de recolección y comunicación de datos han impactado
en la forma en que los operadores interactúan con estos sistemas. Desde el punto de
vista del diseño de interfaces podemos dividir los problemas que presentan las
interfaces de estos sistemas en dos grandes grupos: el mostrado del estado del
proceso de manera efectiva y las interacciones que deben proveerse para que la tarea
1.2 OBJETIVO
Diseñar un software para monitorear el comportamiento de la variable manipulada
y controlada con el fin de evaluar el desempeño del controlador.
1.3 ESTADO DEL ARTE
El control automático ha desempeñado un papel vital en el avance de la ingeniería y
la ciencia además de ser esencial en las operaciones industriales como el control de
presión, temperatura, humedad, viscosidad y nivel en las industrias de procesos. Los
primeros sistemas de control aparecen a principio de los años 50, éstos se
instalaban en salas muy grandes y separadas lo que producía que la comunicación
entre los operadores y la maquina fuera muy compleja como muestra de ello se
tenían instrumentos que registraban hasta 20 señales en pantallas de proyección de
diapositivas de modo que fuera más fácil distinguir los puntos que se estuvieran
registrando para que así el operador tuviera información clara del proceso y tratase
de tomar la decisión más acertada. Debido al desarrollo tecnológico en la década de
los 70 surgen los primeros instrumentos electrónicos como los controladores,
reguladores y servomecanismos gracias a ello se generó el primer uso del control
automático en la industria, parece haber sido el regulador centrífugo de la máquina
de vapor de Watt en el año 1775 aproximadamente. Este aparato fue utilizado para
regular la velocidad de la máquina manipulando el caudal de vapor por medio de
una válvula. A partir de todo este desarrollo surge la necesidad de coordinar los
diversos tipos de controladores estableciendo una jerarquización entre los mismos
para lograr una versatilidad que permitiera el cambio fácil del tipo de controlador y
obtener la mayor economía posible en el control de la planta. Estas características
las reúne el denominado control distribuido, introducido en 1975 en el que uno o
varios microprocesadores se encuentran repartidos en uno o varios puntos de la
planta, conectados a varias señales de proceso correspondientes, en general en una
parte homogénea de la planta. En el control distribuido el proveedor suministra las
pantallas de control, de manera que se hace innecesario el proyecto de realización
del panel de control. Conviene que el usuario presente el tipo de representación
visual que le interese, mostrando la ayuda en el diseño de pantallas para la
planta para que ellos aparte de verse envueltos y reconocido su papel en la planta,
puedan influir en la construcción o fabricación de los diagramas con los que después
van a controlar el proceso. Además, el operador tiene acceso a todos los datos de los
controladores y puede visualizarlos a través de pantallas de televisión ya que se halla
en contacto con los mismos a través de la vía de comunicaciones. Si se desea puede
acoplarse una computadora al proceso para resolver problemas de la dirección de la
planta, desde los más sencillos como la tendencia de variables y su interrelación
hasta los más complejos como la auditoria energética y la optimización de costos de
las diversas secciones de la fábrica. La arquitectura distribuida de las diversas
funciones de la computadora permite relacionar entre sí los valores de variables tales
como el estado del inventario, análisis de productos, automatización de la
producción, mantenimiento y la información necesaria para la dirección para una
toma correcta de decisiones sobre la marcha de la planta. En el presente, puede
afirmarse que la tecnología digital evoluciona todavía más, integrando totalmente la
información de la planta con un flujo de información continua entre las diversas
secciones de la planta (fabricación, mantenimiento, gestión, etc.). La aplicación de
los instrumentos neumáticos y electrónicos-analógicos quedará limitada a pequeñas
plantas, ya que, frente a la instrumentación digital tiene una peor relación
costo-prestaciones y no dispone de la facilidad de comunicación entre instrumentos que
posee la digital. En la segunda mitad de la década de los ochenta, alrededor del año
1986, algunas compañías como National Instruments, introducen herramientas de
software que les permite a los ingenieros desarrollar sistemas, de la misma forma
como se crearon antes las hojas de cálculo para facilitar el trabajo en el análisis
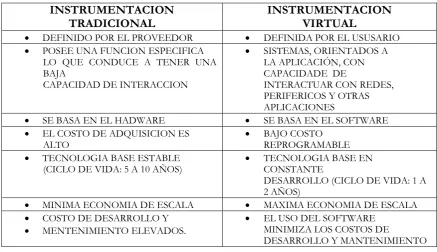
financiero de datos. En la tabla No. 1.1 se muestra una comparación entre los
INSTRUMENTACION TRADICIONAL
INSTRUMENTACION VIRTUAL
DEFINIDO POR EL PROVEEDOR DEFINIDA POR EL USUSARIO POSEE UNA FUNCION ESPECIFICA
LO QUE CONDUCE A TENER UNA BAJA
CAPACIDAD DE INTERACCION
SISTEMAS, ORIENTADOS A LA APLICACIÓN, CON CAPACIDADE DE
INTERACTUAR CON REDES, PERIFERICOS Y OTRAS APLICACIONES
SE BASA EN EL HADWARE SE BASA EN EL SOFTWARE EL COSTO DE ADQUISICION ES
ALTO
BAJO COSTO REPROGRAMABLE TECNOLOGIA BASE ESTABLE
(CICLO DE VIDA: 5 A 10 AÑOS)
TECNOLOGIA BASE EN CONSTANTE
DESARROLLO (CICLO DE VIDA: 1 A 2 AÑOS)
MINIMA ECONOMIA DE ESCALA MAXIMA ECONOMIA DE ESCALA COSTO DE DESARROLLO Y
MENTENIMIENTO ELEVADOS.
EL USO DEL SOFTWARE MINIMIZA LOS COSTOS DE
[image:13.595.78.516.90.342.2]DESARROLLO Y MANTENIMIENTO
Tabla 1.1 Características de un Instrumento Tradicional frente a uno Virtual
Como resultado natural de la evolución en la tecnología de comunicaciones se tiene
el cambio en la instrumentación para las pruebas y medidas en el mercado de la
automatización industrial, con el fin de reducir costos sin necesidad de sacrificar
1.4 JUSTIFICACION
El ingeniero en control y automatización debe decidir cómo aprovechar mejor los
nuevos recursos, provistos por la innovación tecnológica, y de qué manera impactan
en la interfaz máquina. Las cuestiones relativas a la interfaz
hombre-máquina involucran decisiones sobre la cantidad y tipo de responsabilidad de
control que se debe delegar en el operador y cuánto puede éste manejar en forma
segura. En este sentido, el ingeniero de control debe resolver aspectos, tales como la
determinación de cuál es la cantidad de información que puede procesar y manejar
un operador ante una situación problemática, y en consecuencia, cómo se debe
diseñar el sistema de monitoreo y las alarmas para que esa carga disminuya a niveles
seguros o aceptables.
Este tipo de monitoreo de procesos industriales lo podemos dividir en dos grandes
grupos: el mostrado del estado del proceso de manera efectiva y las interacciones
que deben proveerse para que la tarea propuesta pueda llevarse a cabo con éxito. Es
indiscutible que uno de los factores en común lo constituye el humano: es el
operador el que debe poder interpretar la información mostrada, interactuar para
poder acceder a la información que necesita para determinar la acción a seguir y
poder completar el ciclo realizando las acciones correctivas necesarias.
Dentro del campo de la Automatización existen diversos tipos de control, los cuales
poseen varios criterios para la estimación de los parámetros del sistema y una
adecuada implementación. En los procesos industriales la medición y el control de
las variables de nivel y flujo se hacen necesarios: cuando se pretende tener una
producción continua, al mantener una presión hidrostática, cuando un proceso
requiere de control y medición de volúmenes de líquidos ó; bien en el caso más
simple, para evitar que un líquido se derrame; la medición de estos parámetros en
los líquidos, dentro de un recipiente parece sencilla, pero puede convertirse en un
La medición de nivel de líquidos y só1idos, es una de las variables más importantes
en los procesos industriales, seguida de la medición de temperatura, presión y flujo.
La medición de nivel, es un recurso muy valioso para el funcionamiento correcto de
un proceso o del balance programado de la existencia de materias primas para la
elaboración de un producto determinado.
En muchos procesos en donde se manejan líquidos contenidos en recipientes, tal
como columnas de destilación, hervidores, evaporadores, cristalizadores, o tanques
mezcladores el nivel en particular de un líquido en un recipiente puede ser
extremadamente significativo para la buena operación de un proceso.
Por ejemplo, un nivel muy alto pudiera trastornar el equilibrio de una reacción
química, causando daño al equipo o derramando un material costoso de la misma
forma, un nivel muy bajo puede originar consecuencias desagradables.
Además de las condiciones anteriores, existe una tendencia en procesos continuos
hacia la disminución en la capacidad de almacenamiento. Esto reduce el costo inicial
del equipo, pero también acentúa la necesidad para controladores de nivel de
líquidos más precisos y sensibles.
Un análisis final para la medición y control de nivel de líquidos en la operación de
un proceso, comúnmente se puede justificar por razones de economía y seguridad.
Para el operador, la información de esta variable es vital en cuanto a la cantidad de
materia prima disponible para el proceso capacidad de almacenamiento disponible
para el producto que se está elaborando y la operación satisfactoria, o peligrosa para
1.5 ALCANCES
Ya que hoy en día, la instrumentación virtual sigue siendo una de las opciones
favoritas para construir sistemas de automatización y control de procesos. En este
trabajo se realiza un programa diseñado en un software de gran utilidad en
automatización como lo es Visual Basic y en conjunto con la ayuda de la tarjeta de
adquisición de datos nos permite realizar la comunicación entre diversos
dispositivos conectados entre sí con el objetivo de tener una interfaz para
monitorear el comportamiento de la variable manipulada y controlada que en este
caso es el nivel dentro del tanque atmosférico con el fin de evaluar el desempeño del
controlador y garantizar la correcta operación de los mismos.
Debido al giro que viene dando en la actualidad el control de procesos en la
industria y viendo la necesidad que los estudiantes de Ingeniería del Instituto
Politécnico Nacional comprendan y analicen estos temas de un modo más práctico,
se desarrolló este proyecto que tiene como objetivo diseñar e implementar un
módulo de apoyo didáctico de monitoreo y control de nivel basado en PC bajo
plataforma Windows. Integrando entonces los recursos humanos a los tecnológicos
y que este tipo de proyectos e instrumentos de aprendizaje se faciliten a los
estudiantes y sea un programa piloto, modelo de innovación, empeño y muestra de
colaboración del alma mater; obteniendo como valor agregado el posicionamiento
de la Ingeniería en Control y Automatización a nivel regional y nacional, el
desempeño brillante de sus egresados y el deseo de muchos Mexicanos de formarse
2 DESCRIPCION DEL CONTROL Y EL SISTEMA DE NIVEL
2.1 FUNCIONAMIENTO DE LA PLANTA
El funcionamiento de la planta tiene como principio el control de nivel con el
objetivo de mantener a la planta en un nivel constante para eso se cuenta con un
equipo de nivel que a continuación se describe. Todo control de nivel tiene los
objetivos de mantener un nivel a cierta altura considerable en condiciones de
almacenamiento, para un determinado volumen en el proceso.
Para controlar el nivel se debe tener la selección correcta de los instrumentos de
medición de nivel para ello tenemos que tener en cuenta estas características.
Rango de medición
Tipo de fluido
Condiciones de operación.
El Software para supervisar y evaluar el sistema de control de nivel basado en PC
bajo plataforma Visual Basic, integra software y hardware especializado para el
monitoreo y control de las variables definidas en el diseño del sistema.
El software montado bajo plataforma Visual Basic mediante una Tarjeta DAQ
(DAS-8000), adquiere la información proveniente del sensor de nivel ubicado en el
tanque distribuidor dicho sensor operan mediante el principio de medición de
flotador y cuerda, el cual consiste en un flotador y un contrapeso conectados por
medio de una cuerda la cual opera una polea. El flotador hace que la polea se
mueva, de esta manera el movimiento vertical del flotador se transforma a una
medición uniforme por medio de una variación del valor de resistencia de un
potenciómetro lineal, el cual es usado para indicación y registro.
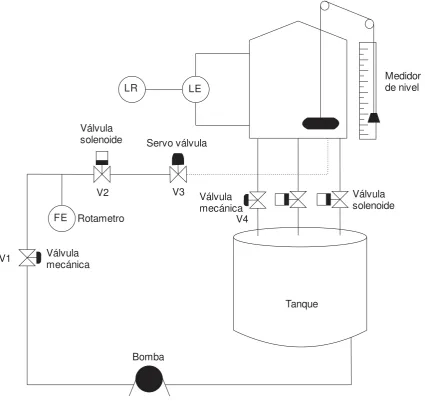
El software desarrollado transforma la señal proveniente del sensor en valores que
indican el nivel del tanque. En la Figura. 2.1 se observa el diagrama representativo
Medidor de nivel
Válvula solenoide Válvula
mecánica Servo válvula Válvula
solenoide
Válvula mecánica
Bomba
LE LR
Tanque V1
V2 V3
V4
[image:18.595.87.513.71.489.2]FE Rotametro
2.2 DESCRIPCIÓN DE LA PLANTA
2.2.1 MEDIDOR DE NIVEL
Su uso es para recipientes abiertos como los anteriores véase Figura. 2.2. Su forma
de operar consiste en soltar la cinta hasta que la plomada toque el fondo del tanque.
La ventaja de este método sobre el anterior, es que permite medir el nivel en tanques
más profundos.
Fig. 2.2 Medidor de Nivel
Encargado de adquirir la información del sistema con el fin de monitorear y ejercer
control con el software en Visual Basic.
2.2.2 ROTAMETRO
Consiste esencialmente de un flotador indicador que se mueve libremente en un
tubo vertical ligeramente cónico con el extremo de menor diámetro en la parte
inferior véase la figura. 2.3.
El fluido entra por la parte inferior del tubo y ejerce una fuerza ascendente sobre la
base del flotador; al subir el flotador permite que pase una determinada cantidad de
flujo por el área anular, área formada entre el flotador y la pared del tubo y será tal
que la caída de presión en ese estrechamiento baste para equilibrar la fuerza de
gravedad y el peso del flotador, en ese momento el flotador permanece estacionario
en algún punto del tubo.
La pérdida de presión se mantiene constante sobre el intervalo completo del flujo.
lleva grabada una escala lineal en unidades del flujo o indica el porcentaje del flujo
máximo. Los rotámetros no necesitan tramos rectos de tubería antes y después del
[image:20.595.271.312.128.307.2]punto donde se instalan.
Fig. 2.3 Rota metro de flujo
2.2.3 TANQUE
Los tanques atmosféricos son un elemento fundamental en una red de
abastecimiento de agua potable para compensar las variaciones horarias de la
demanda de agua véase figura. 2.4. En efecto, las plantas requieren de un buen
abastecimiento y poca variación del caudal. Los tanques absorben las variaciones
horarias: cuando hay poco consumo (como en la noche) se llenan, y cuando el
[image:20.595.236.355.510.673.2]2.2.4 BOMBA CENTRIFUGA
Encargada de suministrar el agua a la red de tuberías desde el tanque distribuidor al
acumulador véase figura 2.5. En hidráulica, una bomba es un sistema mecánico o
electro-mecánico que puede formar parte de un sistema hidráulico o hídrico, el cual
aprovecha la energía del movimiento realizando acciones de regulación y control
para elevar o mover el agua.
Las bombas pueden usarse para contrarrestar la fuerza de gravedad o bien cuando
las cañerías son muy largas, horizontales o con un poco de declive. Existen
[image:21.595.219.384.273.402.2]principalmente dos tipos: estáticas y dinámicas.
Fig. 2.5 Bomba centrifuga
2.2.5 CONTROLADOR UNIVERSAL
Un controlador de dispositivo (llamado normalmente controlador, o, en inglés,
driver) es un programa informático que permite al sistema operativo interactuar con
un periférico, haciendo una abstracción del hardware y proporcionando una interfaz
posiblemente estandarizada para usarlo.
Es como un manual de instrucciones que le indica cómo debe controlar y
comunicarse con un dispositivo en particular. Por tanto, es una pieza esencial, sin la
cual no se podría usar el hardware.
Existen tantos tipos de controladores como tipos de periféricos y es frecuente
encontrar más de un controlador posible para el mismo dispositivo, cada uno
Por ejemplo, aparte de los oficiales (normalmente disponibles en la página web del
fabricante), se pueden encontrar también los proporcionados por el sistema
operativo, o también versiones no oficiales hechas por terceros.
Estos controladores pueden ser genéricos (válidos para más de un modelo del mismo
periférico) o específicos para cada modelo. También se distribuyen actualizaciones a
[image:22.595.234.368.230.385.2]nuevas versiones, que pueden dar un mejor funcionamiento.
Fig. Controlador Universal
2.2.6 NIVEL
Es la distancia existente entre una línea de referencia y la superficie del fluido,
generalmente dicha línea de referencia se toma como fondo del recipiente.
Como se mencionó anteriormente el nivel es la variable que puede ser medida más
fácilmente, pero existen otros factores, tales como viscosidad del fluido, tipo de
medición deseada, presión, si el recipiente está o no presurizado, que traen como
consecuencias que existan varios métodos y tipos de instrumentos medidores del
nivel. El medidor de nivel seleccionado dependerá de nuestras necesidades o
Fig. 2.7 Transmisor de Nivel
2.2.7 FLUJO
Es la cantidad de fluido que pasa a través de la sección por unidad de tiempo. Por
ejemplo, en cierta tubería puede haber un régimen de flujo de 100 galones de agua
por minuto. Esto quiere decir que durante cada minuto que transcurre pasan 100
galones de agua. Si se considera el número de galones que van a pasar a partir de
cierto momento, después de dos minutos 200 galones, etc. Si el régimen de flujo se
mantiene con el mismo valor, después de cierto tiempo habrá pasado un número
total de galones igual al régimen de flujo multiplicado por el tiempo transcurrido;
por ejemplo, después de 15 minutos habrán pasado 100 x 15 = 1.500 galones.
Al contrario dividiendo el número total de galones entre el tiempo, se obtiene el
régimen de flujo. En el ejemplo anterior 1.500/15 = 100 gal/min.
La cantidad de cierto líquido, gas o vapor se puede medir en unidades de masa, y el
régimen de flujo en unidades de masa por unidad de tiempo, por ejemplo, en libras
por hora. De hecho, en la práctica se utilizan dichas unidades, especialmente cuando
se trata de vapor de agua.
Pero con mucha frecuencia se mide la cantidad de un fluido en unidades de
volumen y el régimen de flujo en unidades de volumen por unidad de tiempo, por
ejemplo, galones por minuto, barriles por día, pies cúbicos por hora. Generalmente
la cantidad de agua se mide en galones a 60 °F, la de otros líquidos manejados en la
industria del petróleo, en barriles a 60 °F; la cantidad de gas en pies cúbicos a 60 °F
2.2.8 FUENTE ELECTRICA
En electricidad se entiende por fuente al elemento activo que es capaz de generar
una diferencia de potenciales (d. d. p.) entre sus bornes o proporcionar una
corriente eléctrica. A continuación se indica una posible clasificación de las fuentes
eléctricas:
Las fuentes ideales son elementos utilizados en la teoría de circuitos para el análisis y
la creación de modelos que permitan analizar el comportamiento de componentes
electrónicos o circuitos reales. Pueden ser independientes, si sus magnitudes
(tensión o corriente) son siempre constantes, o dependientes en el caso de que
dependan de otra magnitud (tensión o corriente).
En este punto se tratarán las fuentes independientes, dejando las dependientes para
el final. Sus símbolos pueden observarse en la figura 1. El signo + en la fuente de
tensión, indica el polo positivo o ánodo siendo el extremo opuesto el cátodo y E el
valor de su fuerza electromotriz (Fem.). En la fuente de intensidad, la dirección de la
flecha indica la dirección de la corriente eléctrica e I su valor. A continuación se dan
sus definiciones:
Fuente de tensión ideal: aquella que genera una d. d. p. entre sus terminales
constante e independiente de la carga que alimente. Si la resistencia de carga es
infinita se dirá que la fuente está en circuito abierto, y si fuese cero estaríamos en un
caso absurdo, ya que según su definición una fuente de tensión ideal no puede estar
en cortocircuito
Fuente de intensidad ideal: aquella que proporciona una intensidad constante e
independiente de la carga que alimente. Si la resistencia de carga es cero se dirá que
la fuente está en cortocircuito, y si fuese infinita estaríamos en un caso absurdo, ya
que según su definición una fuente de intensidad ideal no puede estar en circuito
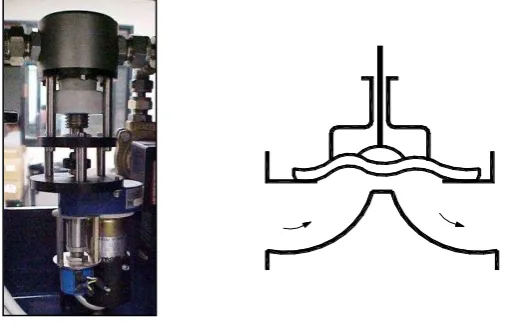
[image:24.595.217.357.648.747.2]2.2.8 VÁLVULAS TIPO DIAFRAGMA (servo válvula)
Este tipo de válvulas (ver figura 2.9) se presta admirablemente para control de
productos como pulpa de papel, lechadas químicas, tintes y ácidos. El diafragma se
asienta en el puente o vertedero de la válvula y obtiene un cierre hermético. El
cuerpo presenta poca resistencia al flujo y evita la acumulación de materias en
suspensión en el puente.
En ésta válvula el obturador es una membrana flexible que a través de un vástago
unido a un servomotor (actuador), es forzada contra un resalte del cuerpo cerrando
así el paso del fluido.
La válvula no viene con empaques en su construcción regular, pero un empaque de
seguridad puede ser suministrado de ser necesario. La válvula se caracteriza porque
el cuerpo puede revestirse fácilmente de goma o de plástico para trabajar con fluidos
agresivos.
Se utiliza para tratamientos de aguas, para el control de fluidos corrosivos, o
teniendo sólidos en suspensión ya que tiene un diafragma entre el cuerpo y el
bonete.
Válvula con la cual se puede ejercer control de flujo dependiendo del porcentaje de
[image:25.595.182.436.538.703.2]apertura que se encuentre.
2.3 MODULO DE ADQUISICIÓN
Fig. 2.10 Modulo Das-8000
Es un módulo de adquisición de datos de señales analógicas y digitales, que puede
funcionar de forma autónoma o supervisada desde un sistema inteligente (PC) ver
figura 2.10. Los datos pueden ser visualizados en el propio instrumento o desde otro
modulo o desde la PC.
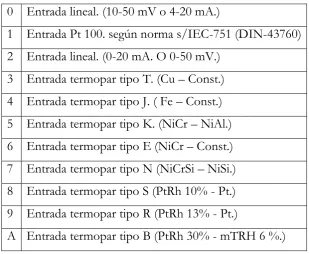
Admite hasta 8 entradas analógicas configurables en PT-100, 0,4/20 mA., 0,10/50
mV
8 tipos distintos de termopares provenientes de convertidores 4/20 mA lineal
izadas (T, J, K, E, N, S, R y B).
Dispone de 8 entradas digitales y 8 salidas digitales.
0 Entrada lineal. (10-50 mV o 4-20 mA.)
1 Entrada Pt 100. según norma s/IEC-751 (DIN-43760)
2 Entrada lineal. (0-20 mA. O 0-50 mV.)
3 Entrada termopar tipo T. (Cu – Const.)
4 Entrada termopar tipo J. ( Fe – Const.)
5 Entrada termopar tipo K. (NiCr – NiAl.)
6 Entrada termopar tipo E (NiCr – Const.)
[image:26.595.143.453.509.763.2]B Curva de linealizacion configurable por el usuario
F Entrada inactiva (off)
Para la comunicación con el ordenador de supervisión se dispone de 1 puerto
[image:27.595.143.439.208.347.2]seleccionable: RS-232; RS-485 (ver. fig. 2.11)
Fig. 2.11 Selección de Puertos
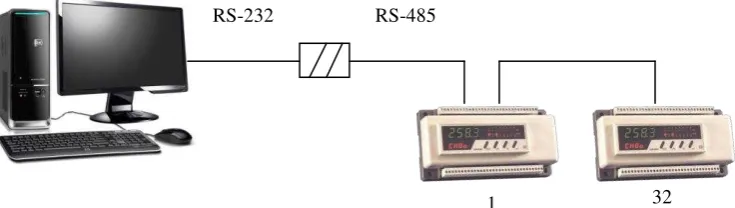
La comunicación en este módulo se efectúa en norma RS-485, posibilitando la
conexión de un máximo de 32 instrumentos en la misma línea de comunicación (ver
fig. 2.12) y en norma RS-232 (fig. 2.14). También dispone de otro canal 232
[image:27.595.93.461.527.631.2]específico para conectar una impresora serie.
FIG. 2.12 Conexión de una red DAS – 8000 en RS -485:
RS-232 RS-485
FIG. 2.13 Conexión de una red DAS-8000 en RS-485 sin PC
FIG. 2.14 Conexión DAS-8000 en RS-232:
La gestión de datos y medidas adquiridas por los módulos utiliza el software
PROASIS DAS WIN que es una aplicación SCADA bajo entorno Windows,
formado por una serie de programas de supervisión y control para procesos
industriales
2.3.1 DIAGRAMA DE CONEXIONES
DASH-8000 DASH-8000 DASH-8000 DASH-8000
[image:28.595.193.394.534.690.2]2.3.2 CONEXIÓN DE ENTRADAS ANALÓGICAS
Separar físicamente en todo el recorrido, las líneas de señal (Pt-100, mA,mV), de las
líneas de potencia o de mando de relés, contactores, servos, actuadores, etc.
Para grandes longitudes de líneas de señal, utilizar cables con hilos trenzados y
apantallados
2.3.3 CARACTERÍSTICAS DE CONEXIÓN
Entradas PT-100: Usar cable de cobre de 3 hilos
Entradas mV: Usar cable de cobre de 1.5 mm2 de sección como mínimo,
respetando polaridad
Entradas mA: Usar cable de cobre de 1.5 mm2 de sección como mínimo.
Respetando la polaridad y añadir en paralelo con los bornes de entrada una
resistencia en paralelo de 2.5 ohms
2.3.4 COMUNICACIÓN SERIE DIGITAL
La conexión de las comunicaciones debe efectuarse exclusivamente con cable
trenzado y apantallado. El blindaje debe ser conectado a tierra
2.3.5 DESCRIPCIÓN FRONTAL
1. Indicador Principal. Presenta el valor de la medida, mensajes y variables de
configuración
2. Presenta el número de canal que se está visualizando, numero de modulo y
mensaje de configuración.
3. indicación de activación o desactivación de las entradas digitales (iluminado-on)
Fig. 2.16 Indicador Principal.
Menú de visualización: es el menú principal de operación (Fig. 2.16) y el que se usa
de un modo común o convencional con el se accede al menú de las conexiones
analógicas, contadores y la modificación de parámetros de la alarma.
Menú de configuración: este menú permite acceder a la parametrizacion y
configuración de todas las opciones con que dispone el modulo DAS-8000
2.4 PROASIS DAS WIN 3.0
Por medio de la PC y el módulo de adquisición de datos se realiza una conexión
RS-232 para verificar el funcionamiento del software PROASIS DAS WIN con la ayuda
del controlador y un arreglo de resistencias
Para poder realizar la conexión entre la PC y el modulo el software tiene tres
diferentes aplicaciones
PROASIS DAS WIN 3.0
La velocidad
El número de ciclos
PROASIS DAS WIN sinópticos
Permite generar sinópticos gráficos, registros de tendencias, históricos, visualizar
medidas y estado de datos, comandar salidas digitales de los módulos DAS-8000 y
gestionar alarmas de proceso.
Para establecer la conexión entre el modulo y la PC se utiliza un arreglo de
resistencias en paralelo de 2.5 Ω conectadas en el módulo de adquisición de datos en
los bornes de conexión de las entradas analógicas del canal 1 como se muestra en el
la figura 2.17.
La conexión entre el módulo de adquisición de datos y el controlador se efectúa en
[image:31.595.89.513.395.507.2]los bornes de conexión del módulo en la entrada de comunicación RS-232
Fig. 2.17 Diagrama Físico.
Al realizar la conexión se supervisa el módulo de adquisición de datos por medio de
la PC y el software (PROASIS DAS WIN) para poder obtener una serie de datos y
realizar una gráfica que representa la variable a manipular figura 2.18.
Fig. 2.18 Conexión de la PC y el Software
RS-232
[image:31.595.112.486.598.752.2]El módulo de adquisición de datos consta de un software y el hardware. El
hardware es el modulo físicamente en donde se aprendió que el modulo nos permite
trabajar con señales analógicas y discretas admite 8 entradas analógicas 8 entradas
discretas y 8 salidas analógicas. El modulo puede trabajar de dos diferentes formas
supervisado por una PC o de forma autónoma. Admite diferentes tipos de entradas
desde termopares, Pt100 (RTD) estandarizadas de 4 a 20 mA.
Su principal característica es que trabaja con dos diferentes protocolos de
comunicación el RS-232 y RS-485.
Alguna de las características más importantes del protocolo de comunicación
RS-232 son los siguientes:
Su comunicación es de punto a punto
Trabaja a tres hilos
Pines de conexión 2,3, y 5 para mandar y recibir datos y el pin 5 para la tierra
Trabaja con +/- 16 V
Se utiliza para adquirir datos que provengan de distancias largas
Características del protocolo de comunicación RS-485
Su comunicación es multipuntos
Trabaja a dos hilos
Necesita un convertidor (gateway)
Trabaja con +/- 18 V
Se utiliza para recoger datos de corta distancia
La segunda parte del módulo es el software llamado PROASIS DAS WIN con el
cual podemos supervisar y gestionar los datos provenientes del módulo de
La suma de estas dos aplicaciones son muy importantes para los ingenieros en
control y automatización es una muy buena herramienta en el control de los
procesos industriales ya que con ella podemos operar los datos obtenidos para
2.5 CONTROL DE NIVEL
Para iniciar el control de nivel en el proceso, la planta debe de arrancar tomando en
consideración el siguiente procedimiento. Todo control de nivel tiene los objetivos
de mantener un nivel a cierta altura considerable en condiciones de almacenamiento,
para un determinado volumen en el proceso.
Para poder controlar el nivel se debe tener la selección correcta de los instrumentos
de medición de nivel para ello tenemos que tener en cuenta estas características.
Rango de medición
Tipo de fluido
Condiciones de operación.
Establecer el flujo máximo a través de la válvula mecánica (2.5 LPM)
Nota: en condiciones iniciales
Cerrar la válvula manual
Abrir la servo válvula a su valor máximo 20 mA por medio de la fuente de (4-20
mA)
Energizar la bomba
[image:34.595.125.454.445.618.2]Abrir la válvula manual hasta 2.5 LPM
Fig. 2.19 Diagrama físico de las conexiones para el arranque del proceso
Mantener a la planta en un nivel constante
Encontrar los parámetros dinámicos del proceso
Identificación paramétrica en ella se debe de efectuar o generar un cambio en la
entrada o cambio en escalón para poder cambiar la salida y obtener una respuesta
del proceso.
En los procesos del mundo real suelen ser no lineales, variantes en el tiempo de
parámetros concentrados y para generar un análisis para fines de control se debe
establecer como:
Lineales que cumple con el teorema de superposición que la variable este
acompañada de una constante.
Invariantes en el tiempo (parámetros constantes) es aquel en el que sus parámetros
no cambian con respecto al tiempo.
De parámetro concentrados (ec. diferenciales ordinarias).
Para poder graficar y encontrar los parámetros del proceso que en este caso son Τ,
K, To se debe de mantener al proceso en un estado estacionario para realizar esa
operación se requiere el siguiente procedimiento.
1.-Establecer el flujo máximo a través de la válvula mecánica v1 (2.5 LPM)
Nota: en condiciones iniciales
Cerrar la válvula manual
Abrir la servo válvula a su valor máximo 20 mA por medio de la fuente de (4-20
mA)
Energizar la bomba
Abrir la válvula manual hasta 2.5 LPM
3.-Regular v3 a través del controlador hasta lograr un nivel constante
4.-Generar un cambio en escalón de un 10% más sobre la entrada
5.-Graficar 2 min. con referencia al reloj del software
[image:36.595.87.468.277.658.2]6.-Encontrar los parámetros del proceso
Fig. 2.20 Diagrama físico
Datos de operación
Flujo máximo 3.0 lpm
Flujo de operación 2.1 lpm
Válvula activada Sol 3
Nivel inicial 58
Nivel final 86
Entrada De 2.1 a 2.2
Tiempo 7:36
Fig. 2.21 Grafica Obtenida
OBTENCION DE LA RESPUESTA DE LA PLANTA EN LAZO ABIERTO
0 20 40 60 80 100
0 10 20 30 40 50 60 70 80
TIEMPO
NI
V
E
L
2.5.1 OBTENCION DE LA GANANCIA
sal(s) = __K__ = ___280__ F.D.T
ent(s) Τs + 1 8.32s + 1
Donde:
K= ΔSAL = 86 – 58 = 28 = 280 mm/lpm
ΔENT 2.2 - 2.1 .1
Τ = 41.6/5 =8.32
Ecuaciones
Nivel-Corriente
Y= mx + b
m= 16/135 = 0.118
20= 0.118(135) + b
b= 4.07
(0.118*u)+4.07
sensor transductor N/I (0.118*u)+4.07
convertidor1 N/I
(0.187*u)+0.75
convertidor I/F
280 8.32s+1 Transfer Fcn
Step Scope2
PID
PID Controller
Corriente-Flujo
Y= mx + b
m= 3/16 = 0.187
3= 0.187(20) + b
b= -0.75
[image:38.595.49.543.72.412.2]Y= 0.187 u + 0.75
Fig. 2.23 Diagrama de simulación
Se analiza a la planta desde su identificación paramétrica para así poder tener un
amplio conocimiento de comportamiento dinámico del proceso y poder proponer
un sistema de control para el proceso.
Se verifica cual es mi variable manipulada y mi variable a controlar para aplicarle una
entrada en escalón que en este caso fue de un 10% de su valor y observar el
comportamiento gracias a la gráfica que obtuvimos después de estar supervisando
los datos con el módulo de adquisición de datos das-8000.
Con la gráfica se obtuvo la ganancia el tiempo muerto y la función de transferencia
Curva de respuesta de la planta y de
la simulación
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
[image:39.595.123.504.93.361.2]0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Fig. 2.24 Respuesta Obtenida
Al obtener estos datos se comparar, o mejor dicho se valida los resultados obtenidos
en la respuesta de la planta y los obtenidos mediante la simulación, con lo cual se
verifica que los dos métodos son complementarios y se puede considerar como una
herramienta más en cuanto a control de procesos se refiere, por los datos obtenidos
anteriormente se puede iniciar la etapa del desarrollo del software para la
3 PROTOCOLOS DE COMUNICACIÓN
3.1 INTRODUCCIÓN
Coloquialmente los protocolos son un conjunto de reglas de cortesía entre personas
que les permite tener una relación social de manera formal siguiendo ciertos
patrones establecidos previamente, por ejemplo; el protocolo dice que la mesa es
presidida por la persona más importante. En esencia, un protocolo es un conjunto
de reglamentos acerca de la formalidad o precedencia, como por ejemplo un
protocolo militar o diplomático.
Sin embargo, en informática y telecomunicaciones, un protocolo es una convención,
o acuerdo entre partes que regulan la conexión, la comunicación y la transferencia
de datos entre dos sistemas de red. Viéndolo de forma más simple, un protocolo se
puede definir como las reglas que gobiernan la semántica (significado de lo que se
comunica), la sintaxis (forma en que se expresa) y la sincronización (quién y cuándo
transmite) de la comunicación.
En otras palabras, dentro de una red de comunicación de datos en la cual se cuenta
con dos o más periféricos (pc‟s, impresoras, fax, servidores, etc.) existe un protocolo
interno entre dichos periféricos que les permite el intercambio de datos dentro de la
red. Algunos autores definen los protocolos de comunicación como sigue:
Un protocolo de red de comunicación de datos es un conjunto de reglas que
gobierna el intercambio ordenado de datos dentro de la red.
Conjunto de reglas de comunicación que rigen el intercambio de información entre
dos equipos o sistemas conectados entre sí.
Un Protocolo de Comunicación es el conjunto de reglas que especifican el
Los protocolos de comunicación son grupos de reglas que definen los
procedimientos, convenciones y métodos utilizados para transmitir datos entre dos
o más dispositivos conectados a una red.
Teniendo en cuenta las definiciones anteriores se entiende que un Protocolo de
comunicación de datos es el conjunto de procedimientos que contienen secuencias
precisas de caracteres para asegurar un intercambio ordenado de datos entre dos
unidades que conforman un sistema de red. Los protocolos pueden estar
implementados en hardware (tarjetas de red), software (drivers), o una combinación
de ambos.
Entiéndase por transferencia de datos dentro de una red a la solicitud de un
dispositivo a otro que realice una instrucción para que desempeñe cierta acción, y
una vez hecha indique al primer equipo que dicha instrucción fue realizada y así este
proceda a dar más instrucciones.
Tal como ocurre por ejemplo cuando por medio de una computadora se le da la
instrucción a una impresora que imprima algún documento con ciertas
características o propiedades de impresión, la impresora detecta la instrucción y
comienza a imprimir con las propiedades que el usuario solicito en la instrucción.
Durante la acción, se despliega en pantalla un recuadro que muestra el estado de la
impresión, y en caso de existir algún fallo o que no se pueda realizar dicha acción,
informa al usuario la situación; o si la impresión se llevó a cabo satisfactoriamente.
3.2 MÉTODOS DE TRANSMISIÓN
Los métodos de transmisión de datos describen cómo transmiten caracteres alfanuméricos
de datos las terminales operadas por humanos a las computadoras anfitrión.
Básicamente, sólo hay dos modos disponibles de transmisión: modo de carácter y
3.2.1 MODO DE CARÁCTER
Cuando se trabaja en el modo de carácter, los códigos de caracteres se transmiten a
la computadora anfitrión inmediatamente después de que un operador haya
oprimido una tecla. El carácter se manda desfasada (asíncronamente), porque las
transmisiones no están sincronizadas con la velocidad de tecleo del operador.
Cuando un operador no está tecleando, la terminal está en estado inactivo. Los
caracteres de datos que se transmiten del anfitrión a la terminal remota se muestran
en la pantalla, en la posición actual del cursor.
3.2.2 MODO DE BLOQUE
En el modo de bloque en transmisión de datos, los caracteres no se transmiten de
inmediato a medida que se teclean. En lugar de ello, el operador los teclea en su
terminal, donde se almacenan en memorias búfer y se muestran en la pantalla.
Cuando el operador está listo para transmitir la información que esta en la pantalla,
oprime la tecla INTRO, o enter, que transmite todos los caracteres de datos que
halla en la terminal local como ocurre por ejemplo en un “Chat Box”. Los caracteres
transmitidos en grupo se llaman bloque de datos. El formato que se usa dentro del
bloque depende del protocolo seleccionado de sistema.
La mayoría de las terminales modernas e inteligentes son capaces de funcionar en
cualquiera de los dos modos, bloque o carácter. El modo de transmisión de carácter
en más común cuando las terminales se comunican en forma directa con la
computadora anfitrión mediante una conexión de comunicaciones directa, como
por ejemplo, líneas telefónicas de marcar. El modo de transmisión en bloque es más
adecuado para circuitos de comunicaciones de datos con varias terminales, que
Tx
Transmisor
Rx
Receptor
Tx/Rx
Tx/Rx
3.3 MODOS DE TRANSMISIÓN
Los sistemas electrónicos de comunicación se pueden diseñar para manejar la
transmisión sólo en una dirección, en ambas direcciones, sólo en una a la vez o en
ambas direcciones al mismo tiempo. Existen cuatro modos de transmisión posibles:
símplex (SX), half duplex (HDX), full duplex (FDX) y full/full duplex (F/FDX).
3.3.1 SIMPLEX (SX)
La transmisión simplex se presenta en una dirección solamente (unidireccional), lo
que deshabilita al receptor de responder al transmisor, tal como ocurre en las
emisiones de ondas de radio o televisión.
SX
Fig. 2.25 Transmisión simplex.
3.3.2 HALF DUPLEX (HDX)
La transmisión half duplex se realiza en ambas direcciones, pero no al mismo
tiempo. Esta ocurre solamente en una dirección a la vez. Tanto el transmisor como
el receptor comparten una sola frecuencia. Una estación puede ser transmisora y
receptora pero no al mismo tiempo, como ocurre con los radios de banda civil y de
policial.
HDX
Tx/Rx
Tx/Rx
Tx/Rx
Tx/Rx
Tx/Rx
3.3.3 FULL DUPLEX (FDX)
La transmisión full duplex permite transmitir en ambas direcciones por el mismo
canal y al mismo tiempo. Existe una frecuencia para transmitir y otra para recibir.
Una estación puede transmitir y recibir en forma simultanea; sin embargo, la
estación a la que se transmite también debe ser de la que se recibe, como ocurre en
un sistema típico de telefonía.
[image:44.595.91.506.533.591.2]FDX
Fig. 2.27 Transmission Full Duplex
3.3.4 FULL/FULL DUPLEX (F/FDX)
Con esta operación es posible transmitir y recibir en forma simultanea, pero no
necesariamente entre las dos mismas estaciones; es decir, una estación puede
transmitir a una segunda estación y recibir al mismo tiempo de una tercera. Este tipo
de transmisión se usa casi exclusivamente en circuitos de comunicación de datos
(redes).
F/FDX F/FDX
Fig. 2.28 Transmission Full/Full Duplex
convierte en estación maestra, y la estación primaria es ahora la esclava. El papel de
la estación maestra es temporal, y la estación primaria determina cuál es la estación
maestra.
En un principio, a la estación primaria se le considera maestra. La primaria solicita
por turno a cada secundaria interrogándola. Una interrogación es una invitación de
la primera a la segunda para que transmita un mensaje. Las estaciones secundarias
no pueden interrogar a una primaria, sin embargo, cuando una primaria interroga a
una secundaria, inicia un cambio de dirección de línea; la secundaria interrogada ha
sido designada como maestra y debe responder. Si la estación primaria selecciona
una secundaria, ésta se identifica como receptora. Una selección es una
interrogación, por parte de la primaria o la segunda, para determinar el estado de la
secundaria, es decir, lista o no lista para recibir un mensaje. Las estaciones
secundarias no pueden seleccionar a la primaria. Las transmisiones de la primaria
van a todas las secundarias, y depende de las estaciones secundarias la
descodificación individual de cada transmisión, y la determinación de si es para ellas.
Cuando una estación secundaria transmite, solo manda a la estación primaria.
De ahí, la importancia de los protocolos en el flujo de información dentro de la red.
Todas las estaciones que conforman el sistema deben contener el mismo protocolo
para que exista un entendimiento al momento de intercambiar datos.
En pocas palabras, el protocolo de comunicación permite que las entidades que
forman la red “hablen” el mismo idioma.
Existe una gran cantidad de protocolos de campo diferentes en el mercado. Algunos
de ellos son exclusivos de compañías que solo son compatibles con los productos
que ésta misma fabrica, y se requiere adquirir una licencia especial para ser
utilizados. Sin embargo, hay otros protocolos que son más abiertos al público y de
mayor acceso para ser adquiridos. Estos se pueden acoplar con una gran variedad de
dispositivos de distintos fabricantes e integrarlos fácilmente ya en conjunto a una
red de campo. Hoy en día, la tendencia es utilizar protocolos abiertos por las
flexibilidad al momento de evaluar los costos de implantación y adaptándose a las
necesidades requeridas.
La característica principal que los protocolos de campo abiertos deben tener es la
posibilidad de implantarlos de forma segura con dispositivos de diferentes
fabricantes que cumplan con el protocolo, y que dichos dispositivos funcionen
satisfactoriamente con el mismo protocolo. Así también, que algún dispositivo
pueda ser reemplazado por otro equivalente de otro fabricante y funcione
adecuadamente con el protocolo que ya está implantado en la red.
Los protocolos que son implementados en sistemas de comunicación que tienen un
gran impacto, suelen convertirse en estándares, debido a que el intercambio de
información es un factor fundamental en numerosos sistemas, y para asegurar la
comunicación se vuelve necesario copiar el diseño y funcionamiento a partir del
ejemplo ya existente. Esto ocurre de manera informal y deliberada. Sin embargo,
existen algunas empresas que proponen la estandarización de los protocolos para
asegurar interoperabilidad de los productos.
3.4 PROPIEDADES DE LOS PROTOCOLOS
Debido a la gran amplitud de campos que cubren, tanto en propósito, como en
especificidad, no es posible generalizar a los protocolos de comunicación de datos.
No obstante, la mayoría de los protocolos especifican una o más de las siguientes
propiedades:
Detección de la conexión física sobre la que se realiza la conexión (cableada
o sin cables)
Pasos necesarios para comenzar a comunicarse (Handshaking)
Negociación de las características de la conexión.
Cómo se inicia y cómo termina un mensaje.
Formato de los mensajes.
3.5 CLASIFICACIÓN DE LOS PROTOCOLOS
Los protocolos de enlace de datos se clasifican en general como asíncrono o
síncronos. Por regla, los protocolos asíncronos usan un formato de datos asíncronos
y módems asíncronos, mientras que los protocolos síncronos usan un formato de
datos síncronos y módems síncronos.
3.5.1 PROTOCOLOS ASÍNCRONOS
La transmisión asíncrona se transmite o recibe a través de caracteres bit por bit,
añadiéndole bit de inicio y bit que indica el fin del paquete de datos. El BIT de inicio
indica al dispositivo receptor que sigue un Terminal de datos; y el bit de término
indica que el Terminal ha finalizado la transmisión. De esta manera se separan los
paquetes de datos que se envían y se reciben; y se sincronizan la unidad transmisora
y receptora para tales acciones. La transmisión asíncrona es menos compleja dado
que la información de sincronización forma parte de cada Terminal. Con esta
transmisión, los caracteres pueden enviarse a intervalos variables o de forma
continua, con la única condición de que el transmisor y el receptor emitan a la
misma velocidad.
Los protocolos asíncronos están orientados a caracteres, que son los caracteres
únicos de control de enlace de datos, como por ejemplo el fin de transmisión (EOT)
e inicio de texto (STX) garantizan la misma acción o hacen la misma función, sin
importar donde estén durante la transmisión. En consecuencia, se debe tener
cuidado para asegurar que las secuencias de bit para los caracteres de control de
enlace de datos, no se presenten dentro de un mensaje, a menos que sean para
ejecutar sus funciones asignadas de enlace de datos. El único tipo de detección de
errores que usan los protocolos asíncronos es la verificación de redundancia vertical,
y para corregir errores se usan sustitución de símbolos y ARQ (retransmisión).
En los protocolos asíncronos en general, cada estación secundaria se limita a un solo
par Terminal/Impresora. A este arreglo de impresión se le llama independiente. Con la
la pantalla de la terminal también se imprimen. Así, la impresora genera una sola
copia en papel de todas las transmisiones. Además del modo de vigilancia de línea,
una estación remota puede estar en cualquier de los tres modos de operación:
transmisión, recepción y local. Desde luego que una estación secundaria esta en
modo de transmisión siempre que haya sido designada maestra.
La secuencia de interrogación en la mayoría de los protocolos asíncronos es bastante
sencilla, y suele consistir en mandar uno o dos caracteres de control de enlace de
datos después de una dirección de interrogación de estación.
Los protocolos de datos síncronos más usados son el sistema de llamada selectiva de
Western Electric (8ª1/8B1), y el protocolo de enlace de datos asíncronos de IBM (83B). En
esencia, ambos protocolos contienen el mismo conjunto de procedimientos.
3.5.2 PROTOCOLOS SÍNCRONOS
En el tipo de transmisión síncrona se usa él envió de un grupo de caracteres en un
flujo continuo de bits. Para lograr la sincronización de los dispositivos transmisor y
receptor, ambos deben de proveer una señal de reloj que establece la velocidad de
transmisión de datos, además de habilitar los dispositivos conectados a los módems
para identificar los caracteres apropiados mientras estos son transmitidos o
recibidos. Antes de iniciar la comunicación ambos dispositivos deben establecer una
sincronización entre ellos, para esto, antes de enviar los datos, se envía un grupo de
caracteres especiales de sincronía; una vez lograda la sincronía, se procede a
transmitir los datos.
A diferencia de la transmisión asíncrona, la transmisión síncrona no necesita
Maestro Esclavo
En los protocolos síncronos una estación secundaria puede tener mas de erminal
/impresora. Al grupo de dispositivos se le llama unidad de asignación. Una sola unidad
de control de línea LCU puede dar servicio a un máximo de 50 dispositivos
terminal/impresora. Los protocolos síncronos están orientados a la transmisión de
caracteres o bits. El protocolo orientado a caracteres de uso más frecuente es el BSC
o bisync (comunicaciones sincronías binarias. 3270); de IBM, y el de más uso
orientado a bits BOP (bit-oriented protocol) en el SDLC (synchronous data link control)
también de IBM.
3.5.3 MODBUS
Modbus es un protocolo de comunicaciones basado en la arquitectura
maestro/esclavo o cliente/servidor, diseñado en 1979 por la compañía Modicon
para su gama de controladores lógicos programables (PLCs). Con el paso del tiempo
se ha convertido en el protocolo de comunicaciones estándar por excelencia. En la
industria es el que goza de mayor disponibilidad para la conexión de dispositivos
electrónicos industriales. Modbus permite el control de una red de dispositivos,
como ocurre en un sistema de medida de temperatura y humedad, y comunicar los
resultados a una computadora. También se usa para la conexión de una
computadora de supervisión con una unidad remota (RTU) en sistemas de
supervisión y adquisición de datos (SCADA).
[image:49.595.93.498.541.622.2]
Fig. 2.29 Protocolo Modbus.
Las razones por las cuales el uso de Modbus es superior a otros protocolos de
comunicaciones son: es público, su implementación es fácil y requiere poco
Maestro Esclavo
Este protocolo define una estructura de mensajes que los dispositivos reconocen y
les permite comunicarse dentro de la red. Además describe el proceso que usa un
controlador (maestro) para pedir acceso a otro dispositivo (esclavo), la forma de
responder a las peticiones de otros dispositivos y cómo se detectan y notifican los
errores. Así también establece un formato común para la disposición y contenido de
los mensajes.
Dentro de los dispositivos maestros más comunes se encuentran los procesadores
centrales y los paneles de programación. Algunos esclavos típicos son los PLC‟s y
los inversores o drivers.
Durante la comunicación dentro de la red, Modbus determina cómo el controlador
direccional a cada dispositivo o identifica un mensaje diseccionado a éste por parte
del dispositivo esclavo. Una vez identificado, determinará el tipo de acción a tomar y
extraerá cualquier dato o información contenida en el mensaje. Si se requiere una
repuesta, el controlador la construirá y la enviará utilizando el mismo protocolo.
Como se dijo anteriormente, la comunicación dentro de las redes Modbus se realiza
por medio de la técnica maestro/esclavo, en la cual sólo un dispositivo controlador
(maestro) puede iniciar la comunicación (peticiones). Los otros dispositivos (los
esclavos) responden suministrando al maestro el dato solicitado, o realizando la
acción solicitada en la petición.
El maestro puede direccional esclavos individualmente o puede generar un mensaje
en modo de difusión a todos los esclavos. Los esclavos responden a las peticiones
que les son diseccionadas individualmente.
[image:50.595.98.480.643.723.2]
Modbus establece el formato para la petición del maestro, colocando en ella la
dirección del esclavo, un código de función que define la acción solicitada, cualquier
dato que deba enviarse y un campo de comprobación de error. La estructura del
mensaje de respuesta del esclavo está también definida por este protocolo. Dicha
estructura contiene los campos confirmando de la acción tomada, cualquier dato
que haya de devolverse y un campo de comprobación de error. Si el mensaje
recibido por el esclavo es defectuoso o el esclavo es incapaz de realizar la acción
[image:51.595.89.457.267.608.2]solicitada, construirá un mensaje de error y lo enviará como respuesta.
Fig. 2.31 Ciclo Petición-Respuesta.
En lo referente al código de función en la petición, el maestro indica al dispositivo
esclavo diseccionado, el tipo de acción a realizar. Los bytes de datos contienen
cualquier información adicional que el esclavo necesitará para llevar a cabo la
función. El campo de datos debe contener la información que indique al esclavo en
error proporciona un método para que el esclavo valide la integridad del contenido
del mensaje recibido.
Si el esclavo responde de manera normal, el código de función contenido en la
respuesta es una réplica del código de función enviado en la petición. Los bytes de
datos contienen los datos recolectados por el esclavo, tales como valores de
registros o estados. Si ocurre un error, el código de función contenido en la
respuesta es diferente al código de función enviado en la petición, para indicar que
la respuesta es una respuesta de error y los bytes de datos contienen un código que
describe el error. El campo de comprobación de error permite al maestro confirmar
que los contenidos del mensaje son válidos.
Modbus define dos modos de transmisión: RTU (Remote Terminal Unit) que es una
representación binaria compacta de los datos; y ASCII (American Satandard Code
for Information Interchange) es una representación legible del protocolo pero
menos eficiente. Ambas implementaciones del protocolo son del tipo serie. Los
usuarios podrán (en ciertos equipos) seleccionar el modo deseado, junto con los
parámetros de comunicación del puerto serie (velocidad, paridad, etc.), durante la
configuración de cada controlador. El modo y los parámetros serie deben ser los
mismos para todos los dispositivos conectados a una red Modbus. La selección de
cualquiera de los dos modos tiene que ver únicamente con redes Modbus estándar y
básicamente se caracterizan por definir los bits contenidos en los campos del
mensaje transmitido en forma serie en esas redes y por determinar cómo debe ser
empaquetada y decodificada, la información en los campos del mensaje.
3.5.5 MODO ASCII
Cuando los controladores se configuran para comunicar en una red Modbus usando
Sistema de codificación: Hexadecimal, caracteres ASCII 0-9, A-F
Un carácter hexadecimal contenido en
Cada carácter ASCII del mensaje.
Bits por bytes: 1 bit de arranque.
7 bits de datos, el menos significativo se
envía primero.
1 bit para paridad Par o Impar, ningún bit
para No paridad.
1 bit de paro si se usa paridad; 2 bits si no
se usa paridad.
Campo de Comprobación de error: Comprobación Longitudinal
Redundante (LRC).
3.5.6 MODO RTU
Cuando los controladores se configuran para comunicar en una red Modbus usando
el modo RTU (Remote Terminal Unit), cada byte de 8 bits contiene dos dígitos
hexadecimales de 4 bits. La principal ventaja de este modo es que permite mayor
densidad de caracteres mejorando el rendimiento con respecto al modo ASCII para
la misma velocidad. Cada mensaje debe ser transmitido en un flujo continuo. El
formato para cada byte en modo RTU es:
Sistema de codificación: Binario 8 bits, hexadecimal 0-9, A-F
Dos dígitos hexadecimales contenidos en
Cada campo de 8 bits del mensaje.
Bits por byte: 1 bit de arranque.
8 bits de datos, el menos significativo se