2006
Francisco Hurtado Rico
Resumen
En esta tesis se desarrolla un método de estimación de los parámetros físicos del
motor de corriente directa de excitación separada con el campo constante, aplicando el
algoritmo de Steiglitz-Mcbride. La implementación se realizó usando MATLAB©. El
método propone, que para la obtención de los parámetros es necesario únicamente el
muestreo de tres señales: Voltaje de armadura (Va), Corriente de armadura (Ia) y la
velocidad angular (ω). Las señales antes mencionadas deben de ser muestreadas en el
arranque del motor, para obtener su comportamiento dinámico.
Se presenta el análisis y la aplicación del algoritmo de Steiglitz-Mcbride en la
estimación de los parámetros del motor de corriente directa, por lo que se plantean los
fundamentos en la identificación de sistemas, se selecciona el tipo de modelo para la
estimación (ARX ó ARMAX) y se encuentra la relación existente entre los parámetros
estimados por el algoritmo y los parámetros fisicos del motor.
El algoritmo se aplicó primero para estimar los coeficientes de filtros digitales IIR, y
posteriormente en dos motores de corriente directa, uno de excitación separada con campo
constante y otro de imanes permanentes. En ambos casos se simulo la operación de los
motores en Simulink©, los parámetros fisicos de los motores mencionados, usados para la
simulación de la operación son reales y fueron tomados de dos trabajos, uno los obtiene
por medición directa [17] y otro aplicando un método de redes neuronales [2]. De la
simulación de la operación de ambos motores se tomaron las muestras para la estimación.
Los resultados muestran que el algoritmo de Steiglitz-Mcbride puede usarse como
estimador de los parámetros del motor de corriente directa de excitación separada con el
campo constante, ya que ajusta los parámetros del modelo ARX para seguir la dinámica del
sistema. Los parámetros estimados se comparan con los parámetros reales ó de referencia,
mostrando un error máximo de 13.98 %. Finalmente se valida la estimación al comparar
las respuestas de corriente de armadura y velocidad angular simuladas usando los
parámetros estimados y los reales.
Abstract
In this thesis a method of estimate of the physical parameters of the DC motor with
separated excitation and excitation field constant is developed, applying the
Steiglitz-Mcbride algorithm. The implementation was carried out using MATLAB©. The method
proposes that only for get the parameters is necessary samples of three signals: Armature
voltage (Va), Armature Current (Ia) and the Angular speed (ω). The signals before
mentioned they should be sampled in the starting of the motor, to obtain their dynamic
behavior.
It is presented the analysis and the application of the Steiglitz-Mcbride algorithm in
the estimatiom of the DC motor parameters, for what the principles about identification
systems is showed, model for the estimation is selected (ARX or ARMAX) and the
existent relationship among the parameters estimated by the algorithm and the physical
parameters of the motor is founded.
The algorithm was first applied to estimate digital filters coefficients and later in a
DC motor with separated excitation and excitation field constant and a permanent magnet
DC motor. In both cases the operation was simulated in Simulink©, the physical
parameters of the mentioned motors, used for the simulation of the operation are real and
they were taken of two works, one obtains them from direct masurement [17] and another
applying a method of neuronal networks [2]. From the simulation of the operation of both
motors were taken the samples for the estimation.
Results, it is shown that the algorithm of Steiglitz-Mcbride can be used as estimator
of the parameters of the DC motor with separated excitation and excitation field constant,
since it adjusts the parameters of the ARX model to follow the dynamics of the system. The
estimated parameters are compared is made with the real parameters or reference
parameteres, shown a an maximum error of 13.98%. Finally estimation is validated when
the response of armature current and angular speed simulated using estimation parameters
and the real ones are compared.
Indice
Resumen ...I Abstract ... II Indice ...III Glosario ...V Lista de Símbolos ...V Lista de Figuras ...VIII Lista de Tablas ...VIII Capitulo 1. Introducción
1.1. Generalidades. ... 1
1.2. Estado del arte ... 1
1.3. Justificación. ... 4
1.4. Objetivo ... 5
1.5. Estructura de la tesis. ... 5
Capítulo 2. Identificación de Sistemas 2.1. Concepto de Sistema y modelo ... 6
2.2. Tipos de Sistemas ... 7
2.3. Tipos de modelos... 8
2.5. El proceso de identificación ... 9
2.6. Métodos de identificación. ... 10
2.6.1. Técnicas de identificación no paramétrica... 11
2.6.2. Técnicas de identificación paramétrica... 12
2.6.3. Tipos de modelos parámetricos.... 12
2.6.3.1.El modelo ARX... 14
Capítulo 3. Algoritmo de Steiglitz-Mcbride 3.1. Selección del método de ajuste... 15
3.1.1. Error de predicción o error del modelo.... 15
3.1.2. Regresión Lineal.... 15
3.1.3. Selección del algoritmo de ajuste de parámetros.... 16
3.2. Algoritmo de Steiglitz-Mcbride. ... 17
3.2.1. Obtención del algoritmo.... 17
3.2.2. Propiedades de convergencia del algoritmo de Steiglitz-Mcbride.... 19
3.2.2.1.Puntos de posible convergencia... 19
3.2.2.2.Propiedades de convergencia local... 21
3.2.2.3.Propiedades de convergencia global.... 22
3.2.3. Desarrollo del algoritmo.... 22
3.2.3.1.Prefiltrado(Algoritmo de Prony)... 23
3.2.3.2.Estimación... 24
3.3. Algoritmo de estimación de sistemas discretos Steiglitz-Mcbride en MATLAB 6.5 (filtros)... 27
3.3.1. Prueba de algoritmo.... 28
Capítulo 4. Modelo del motor de corriente directa para la estimación de parámetros
4.1. Circuito equivalente y modelo de estado del motor de corriente directa ... 32
4.2. Obtención de las ecuaciones que relacionan los parámetros del motor. ... 34
4.3. Modelo discreto usado con el algoritmo de Steiglitz-Mcbride... 35
4.4. Obtención del modelo continuo de la estimación de Steiglitz-Mcbride... 36
4.5. Obtención de los parámetros del motor de corriente directa a partir de la estimación realizada. ... 37
4.5.1. Obtención de K (constante electromotriz)... 38
4.5.2 Obtención de J (momento de inercia del motor) y B (coeficiente de fricción viscosa).... 38
4.5.3. Obtención de Ra (Resistencia de armadura) y La (Inductancia de armadura).39 Capítulo 5. Resultados 5.1. Estimación de los parámetros de dos motores de corriente directa... 41
5.1.1. Caso 1.... 41
5.1.2. Caso 2... 45
Capítulo 6. Conclusiones, Aportaciones y trabajos a futuro 6.1. Conclusiones... 48
6.2. Aportaciones de la tesis. ... 49
6.3. Trabajos futuros... 49
Referencias ... 50
Apéndice ... 53
Glosario
MATLAB Programa laboratorio de matrices creado por MathWorks. SIMULINK Programa de simulación de sistemas creado por MathWorks.
BIAS Distorsion sistemática de un resultado estadistico debido a un factor no permitido para su derivación.
Lista de Símbolos
EMF Fuerza Electromotriz.
C.D. Corriente directa
ARX Sistema Auto Regresivo con entrada Exógena.
ARMAX Sistema Autorregresivo de Media Móvil con Variable Exógena.
OE Error de Salida.
BJ Box Jenkins.
y(t) Salida del sistema.
u(t) Entrada del sistema.
r(t) Señal de ruido.
G(q-1) Función de transferencia discreta del sistema.
g(k) Respuesta al impulso.
G(ejω) Respuesta a la frecuencia.
w(t) Salida debida a las perturbaciones.
η(t) Salida debido a la entrada.
s(t) Salida medible del sistema.
q-1 Operador retardo.
θ Vector de parámetros.
G(q-1,θ) Función de transferencia del sistema.
H(q-1,θ) Función de transferencia de las pertubaciones. A(q-1,θ) Polinomio que relaciona la salida medible del sistema.
1
B q( − ) Polinomio numerador de G(q-1,θ). 1
F q( − ) Polinomio denominador de G(q-1,θ). 1
C q( − ) Polinomio numerador de H(q-1,θ). 1
D q( − ) Polinomio denominador de H(q-1,θ).
ai Coeficientes del polinomio A(q-1,θ).
bi Coeficientes del polinomio 1
B q( − ).
ci Coeficientes del polinomio 1
C q( − ).
di Coeficientes del polinomio 1
D q( − ).
fi Coeficientes del polinomio 1 .
F q( − )
ε(t,θ) Error de predicción.
ye(t, θ) Salida estimada.
ϕT(t) Vector de regresión.
v(t) Proceso estocastico de orden finito.
k iteración
1
k
A q
∧ −
( ) Estimación k del polinomio A(q
-1,θ).
1
k
B q
∧ −
( ) Estimación k del polinomio
1 B q( − ). na
Orden del Polinomio A qk( −1).
nb Orden del Polinomio 1
B q( − ).
n a
∧
Orden del Polinomio A qk 1
∧ −
( ). n b
∧
Orden del Polinomio B qk 1
∧ −
( ).
h(n) Respuesta al impulso.
na
a
na-ésimo coeficente de A qk( −1). nb
b
nb-ésimo coeficente de B qk( −1).
IIR Filtro de Respuesta Infinita.
H(z) Función de transferencia de IIR.
A(z) Denominador de H(z).
B(z) Numerador de H(z).
b Vector de coeficientes de B(z).
*
a Vector de coeficientes A(z).
1
h vector de los últimos K-nb términos de la respuesta al impulso. 1
H Partición (nb+1) x (na+1) de la convolución B z( )=H z A z( ) ( ).
2
H (K-nb) x na remanente de la convolución B z( )=H z A z( ) ( ).
( )z
α Prefiltro de coeficientes.
v(n) Respuesta filtrada de la salida y(n)
w(n) Respuesta filtrada de la entrada u(n)
1
C Matriz de convolución de v(n)
2
C Matriz de convolución de w(n)
T Matriz compuesta de [C1 C2].
c Vector de coeficientes estimados [anabnb].
niter Número de iteraciones.
SISO Una entrada-una salida.
Va Voltaje de armadura, voltios.
Ia Corriente de armadura, amperios
Ra Resistencia de armadura, ohmios
La Inductancia de armadura, henrios
Vf Voltaje de campo, voltios
If Corriente de campo, amperios
Rff Resistencia de campo, ohmios
Lf Inductancia de campo, henrios
Laf Inductancia mutua de velocidad, henrios
J Momento de inercia del motor, kg-m2
Β Coeficiente de fricción viscosa, kg-m2/s
TL Par externo aplicado al motor, N-m
ω Velocidad angular del motor, rad/seg.
K Constante contraelectromotriz
1
a , a2,a3,a d4, Coeficientes que describen el modelo real. s
Ω( ) Velocidad angular en terminos de el operador s
a
I s( ) Corriente de armadura en terminos de el operador s
a
V s( ) Voltaje de armadura en terminos de el operador s
1e
a , a2e,a3e,a4e,a5e, a6e Coeficientes que se estiman con el algoritmo.
Ts Tiempo de muestreo
Rpm Revoluciones por minuto
Hp Caballos de fuerza
Err Error del valor estimado contra el real.
M1 Motor 1
M2 Motor 2
Lista de Figuras
Capitulo 2
Figura 2.1. Sistema dinámico con entrada u(t), perturbación r(t) y salida y(t)... ...7
Figura 2.2. El proceso de identificación. ...10
Capitulo 3 Figura 3.1. El algoritmo de Steiglitz.Mcbride ...22
Figura 3.2. Filtrado de la entrada y la salida con la estimación del prefiltrado. ...25
Figura 3.3. Obtención de la entrada y salida que serán usada en la estimación...28
Figura 3.4. Graficas de entrada x y salida y que se usaran en la estimación del filtro de 3° orden. ...29
Figura 3.5. Obtención de la entrada y salida que serán usada en la estimación del filtro de 4° orden. ...30
Figura 3.6. Graficas de entrada x y salida y que se usaran en la estimación del filtro de 4° orden . ...30
Capitulo 4 Figura 4.1. Modelo equivalente del motor de corriente directa ...32
Capitulo 5 Figura 5.1. Obtención de las muestras de señales para la estimación...42
Figura 5.2. Gráfica de velocidad angular obtenida con los parámetros reales M1. ...43
Figura 5.3. Gráfica de velocidad angular obtenida con los parámetros estimados M1...43
Figura 5.4. Gráfica de corriente de armadura obtenida con los parámetros reales M1...44
Figura 5.5. Gráfica de corriente de armadura obtenida con los parámetros estimados M1. ...44
Figura 5.6. Gráfica de velocidad angular obtenida con los parámetros reales M2. ...46
Figura 5.7. Gráfica de velocidad angular obtenida con los parámetros estimados M2...46
Figura 5.8. Gráfica de corriente de armadura obtenida con los parámetros reales M2...47
Figura 5.9. Gráfica de corriente de armadura obtenida con los parámetros estimados M2. ...47
Lista de Tablas
Capitulo 2 Tabla 2.1. Diferentes estructuras de modelos paramétricos...14Capitulo 3 Tabla 3.1. Coeficientes reales y estimados del filtro IIR de 3° orden propuesto...29
Tabla 3.2. Coeficientes reales y estimados del filtro IIR de 4° orden propuesto...31
Capitulo 5 Tabla 5.1. Parámetros reales del motor caso 1. ...41
Tabla 5.2. Comparación de resultados de los valores reales contra los estimados caso 1. ...42
Tabla 5.3. Parámetros reales del motor caso 2. ...45
Tabla 5.4. Comparación de resultados de los valores reales contra los estimados caso 2. ...45
1
Introducción
1.1.Generalidades.
Los motores de corriente directa, son máquinas eléctricas que producen energía
mecánica a partir de energía electrica. Esta capacidad de transformación hace que su
aplicación dentro del campo del control como accionamiento sea amplio. El formar parte
del sistema de control, genera la necesidad de que en un momento dado que se requiera
simular dicho sistema se cuente con un modelo que sea aceptable y válido, que refleje la
operación dinámica del mismo.
En el campo de la identificación de sistemas y estimación de parámetros, además de
contar con herramientas que son experimetales en su totalidad, podemos plantear el uso de
métodos que involucren más el procesamiento de señales de entrada y salida en lugar del
análisis numérico de variables físicas que se obtienen de instrumentos. Dentro de los
algoritmos que tienen amplia aplicación en la estimación de parámetros podemos
mencionar el de Steiglitz-Mcbride, cuya característica principal es la de proporcionar un
resultado aceptable con pocas iteraciones, además de que el problema de estimación de
parámetros puede ser reducido a la solución repetida de un sistema de ecuaciones lineales,
y puede ser implementado en un procesador de señales digitales si así se requiere.
La estimación de modelo del motor de corriente directa ha sido ampliamente estudiado,
y en su mayoría dichos estudios son para la validación de metodos de estimación, por ser
un modelo sencillo en su representación, además de que las señales involucradas en su
alimentación son fáciles de proponer.
1.2.Estado del arte
Los métodos convencionales de medición de parámetros de motores de corriente
directa, presentan un gasto de tiempo extra, debido a que estos métodos consisten en la
medición separada de los parámetros mecánicos y eléctricos. Además de que algunos
métodos presentan dependencia del tipo de técnica que se aplique, y dado que la estimación
se realiza en estado estacionario, y no es posible obtener su comportamiento dinámico, tal
como lo muestra [1].
Se tiene el antecendente de trabajos que presentaron mejoras al método experimental
presentado en [1], dichos trabajos fueron desarrollados por:
• Siri Weerasooriya y M.A. El-sharkawi en 1991 [2]. Reportan un sistema de control e identificación de alto rendimiento para un motor de C.D. basado en una red neuronal
artificial de retropropagación. En el cual se hace énfasis en asegurar una trayectoria
precisa del control de la velocidad, especialmente cuando los parámetros son
desconocidos. La red neuronal entrenada que sirve como identificador del modelo del
motor se combina con un modelo de referencia para el control de la velocidad.
• Y.C. Lim, et al en 1992 [3] . Reportan un sistema de identificación basado en una
microcomputadora con un programa en lenguaje C, mediante el cual el proceso de
identificación de los parámetros del motor de C.D. sin escobillas es completamente
automatizado, minimizando el tiempo requerido en los métodos clásicos. El énfasis de
este trabajo es en el algoritmo en que se basa el sistema de estimación que es la
ecuación de Pasek.
• Crnošija, Petar, et al en 1992 [4], proponen un método de estimación gráfico-analítico
para la obtención de los parámetros de armadura y las constantes electromecánicas.
Con los parámetros obtenidos se implementa, mediante simulación, un accionamiento
para el motor de C.D. usando tiristores.
• Sequare Daniel-Berhe y Heinz Unbehauen en 1996 [5], reportan la identificación de los parámetros de un modelo continuo bilineal de un motor de C.D. El objetivo del
trabajo fue demostrar que el método de funciones moduladas de Hartley (HMF) es
aplicable a la identificación de sistemas fisicos continuos. El método HMF se utiliza en
conjunto con un método de mínimos cuadrados. Además como resultado final presenta
los parámetros identificados para un motor de C.D. de excitación separada.
• Olaf Moseler y Rolf Isermann en 2000 [6]. Reportan una técnica de estimación para detección de fallas en el motor de C.D., que se realizó midiendo únicamente la
entrada y la salida, y que después se aplico al modelo matemático del proceso. La
estimación realizada provee información acerca de la resistencia de armadura, la
constante EMF y los parámetros mecánicos.
• Liu Xiang-Qun et al en 2000 [7]. Reportan un método de estimación basado en series de funciones de pulso para obtener el modelo continuo de un motor de imán
permanente de C.D.. Los parámetros electromecánicos pueden obtenerse del modelo
estimado. Con la obtención de dichos parámetros se implementa un método de
diagnóstico y detección de fallas. Se usa una red multicapa tipo perceptrón para
aislar las fallas del motor por los cambios de los parámetros.
• Ata Sevinc en 2003 [8]. Implementa un observador adaptivo para estimar los
parámetros eléctricos y mecánicos para un servomotor de C.D. El observador usa
retroalimentación indirecta, pero el esquema de adaptación utiliza la medición de
corriente y velocidad angular. Como parte de su trabajo muestra que los esquemas
de adaptación e identificación puedan ser implementados en tiempo real en forma
simple. Se muestra la simulación del observador adaptivo con resultados
aceptables.
• De los trabajos en estimación de parámetros de la SEPI-ESIME se encontro
unicamente uno que realiza una estimación robusta de parámetros para el diseño de
un control adaptable de excitación de un generador síncrono, y aun aquí no se
obtienen los parámetros fisicos sino unicamente los que permiten realiar un modelo
que siga el comportamiento dinámico del mismo [32].
Los trabajos revisados anteriormente muestran los diferentes métodos usados en la
estimación de parámetros del motor de C.D. No se encontró ningún artículo que realice la
estimación de los parámetros mediante el algoritmo de Steiglitz-Mcbride, que es el objetivo
de la presente tesis. Desde su publicación en 1965 por K.E. Steiglitz y L.E. Mcbride [9], se
publicaron artículos que analizaban unicamente la estabilidad y convergencia del método
[10] y un análisis de la existencia de puntos estacionarios en el algoritmo [11] y los únicos
trabajos relacionados con este algoritmo muestran estimaciones pero unicamente de filtros
digitales[12]-[13]. Fue a partir de la implementación de dichos filtros que se pensó en
usarlo como un método de estimación de parámetros, dado que los coeficientes de los
filtros representan los parámetros de operación.
1.3. Justificación.
El uso de motores de corriente directa como accionamiento para posicionamiento de
precision y como elemento de fácil control en cuanto a su velocidad de rotación en el
campo de la mecatrónica, y los sistemas eléctricos de potencia es bien conocido. La
determinación precisa de los parámetros del motor de C.D. es esencial en el diseño y
análisis de los sistemas electromecánicos de control. Una de las necesidades considerando
lo anterior, es que se cuente con un método de estimación que sea lo mas transparente al
usuario, dejando de lado, los procedimientos experimentales clásicos, para poder enfocarse
en el desarrollo del sistema de control y no concentrarse en exceso en la estimación.
Para proporcionar un método que evite al mínimo el conocimiento excesivo de las
técnicas experimentales clásicas usadas en la estimación de parámetros, la presente tesis se
enfoca a los siguientes puntos:
1. La necesidad de proporcionar un método de estimación de parámetros de un motor
de corriente directa ( C.D.) centrado en el usuario, el cuál unicamente deberá
proporcionar las señales: voltaje de armadura (Va), corriente de armadura (Ia) y la
velocidad angular (ω), en forma discreta.
2. La necesidad de contar con una herramienta que sirva como infraestructura en el
laboratorio de máquinas de la Sección de Estudios de Posgrado e Investigación
(SEPI-ESIME) unidad Zacatenco con el fin de poder hacer aplicaciones en el campo
del control inteligente y adaptivo para sistemas eléctricos de potencia, así como
aplicaciones de control de máquinas rotatorias con fines de investigación y
docencia. Ya que actualmente no se cuenta con un modelo de simulación que
describa completamente el simulador de sistemas eléctricos de potencia, con que se
cuenta.
1.4.Objetivo
• Determinar los parámetros eléctricos y mecánicos de un motor de corriente directa
aplicando el algoritmo de Steiglitz-Mcbride utilizando MATLAB, con propósitos de
investigación y docencia.
1.5.Estructura de la tesis.
El capítulo 1 corresponde a la introducción. Se plantea una breve descripción del problema a abordar, el estado del arte, la justificación, el objetivo y la estructura de la tesis.
El capítulo 2 describe los conceptos básicos acerca de la identificación de sistemas, así como las estructuras propuestas para los modelos en función de sus características de
entrada-salida. Además se muestra el diagrama de flujo que se sigue en un proceso de
estimación de sistemas.
El capítulo 3 describe el algoritmo de Steiglitz-Mcbride, desde su definición básica hasta su implementación en MATLAB, además de mostrar las ventajas que presenta dicho
algoritmo y la forma de procesamiento de la información del mismo. Se probó el algoritmo
primeramente estimando los parámetros de filtros de 3° y 4° orden.
El capítulo 4 describe la obtención del modelo matemático necesario para la estimación de los parámetros por el algoritmo de Steiglitz-Mcbride, se muestran las
funciones de transferencia obtenidas en función de este modelo 1( ) ( ) ( )
a a
I s V s
=
G s y
2
( ) ( )
( )
a
s G s
I s
ω
= y la forma en que se obtuvieron las relaciones de los coeficientes de estas
funciones con los parámetros físicos del motor de C.D.
El capitulo 5 muestra los resultados obtenidos al aplicar el algoritmo a la simulación de dos motores reales de los cuáles se conocen sus parámetros, también se
muestran las curvas de respuesta de la corriente de armadura Ia y la velocidad angular ωa,
comparando la real y la estimada, además de la comparación del error obtenido con los
valores reales y los valores estimados de los parámetros del motor de C.D.
2
Identificación de Sistemas
El diseño de un controlador contínuo o discreto, ya sea mediante técnicas clásicas o en
variables de estado, requiere de un modelo de la planta a controlar que caracterice su
comportamiento dinámico. Este modelo permite al diseñador realizar y validar mediante
simulación el ajuste de los parámetros del controlador que permiten obtener una respuesta
que satisfaga las especificaciones de diseño. Zadeh (1962) define identificación de sistemas
como la determinación sobre la base de la entrada y la salida, de un sistema dentro de una
clase específica de sistemas, para el cuál el sistema bajo prueba es equivalente[33].
2.1. Concepto de Sistema y modelo
Hall and Fagan (1956) definen un sistema como la relación existente entre un grupo
unido de elementos [34] .
En el caso de un sistema dinámico, el grupo de elementos o universo consistirá de
funciones en el tiempo, mapeadas de el eje de tiempo T R al espacio de señales W y el comportamiento(secuencia de estados del sistema) B que es la familia de trayectorias en tiempo evaluada en W, las cuáles son compatibles con las leyes del sistema dinámico. Formalmente, un sistema dinámico Σ es la terna (T,W,B) con T R, W el espacio de señales y B W
⊆
⊆
⊆ T
el comportamiento [35].
Los elementos que forman al sistema dinámico pueden definir su universo de discurso a
través de procesos que permitan al sistema su automodificación. Un proceso es una
secuencia de acciones subsecuentes o pasos. El proceso tiene definido un paso inicial y un
paso final, en forma abstracta podemos definir el paso inicial como entrada y el paso final
como salida del proceso[36]. Al realizarse un proceso interactuan variables que producen
señales observables. Las señales observables que son de interés para el observador se
denominan salidas del sistema, mientras que las señales que pueden ser manipuladas
libremente por dicho observador son las entradas del mismo. El resto de señales que
influyen en la evolución de las salidas pero no pueden ser manipuladas por el observador se
denominan perturbaciones. En la figura 2.1. se muestra la representación general de un
sistema dinámico.
Perturbación
r(t)
Sistema Dinámico Salida
y(t)
Entrada
[image:18.612.171.423.102.200.2]u(t)
Figura 2.1. Sistema dinámico con entrada u(t), perturbación r(t) y salida y(t).
Un modelo es una representación de un sistema que permite la investigación de las propiedades del sistema.
2.2. Tipos de Sistemas
En función del tipo de sistema y de la representación matemática utilizada, los sistemas
pueden clasificarse en[18]:
a. Determinísticos y estocásticos. Se dice que un sistema es determinístico cuando
expresa la relación entre entradas y salidas mediante una ecuación exacta y un
modelo que es estocástico posee un cierto grado de incertidumbre. Estos
últimos se definen mediante conceptos probabilísticos o estadísticos.
b. Dinámicos y estáticos. Un sistema es estático cuando la salida depende
únicamente de la entrada en ese mismo instante (un resistor, por ejemplo, es un
sistema estático). En estos sistemas existe una relación directa entre entrada y
salida, independiente del tiempo. Un sistema dinámico es aquél en el que las
salidas evolucionan con el tiempo tras la aplicación de una determinada entrada
(por ejemplo, una red RC). En estos últimos, para conocer el valor actual de la
salida es necesario conocer el tiempo transcurrido desde la aplicación de la
entrada.
c. Continuos y discretos. Los sistemas continuos trabajan con señales continuas, y se caracterizan mediante ecuaciones diferenciales. Los sistemas discretos
trabajan con señales muestreadas, y quedan descritos mediante ecuaciones en
diferencias.
2.3. Tipos de modelos
Los modelos de sistemas físicos pueden ser de muy diversos tipos. Una clasificación, en
función del grado de formalismo matemático que poseen, es la siguiente[18]:
• Modelos mentales, intuitivos o verbales. Estos modelos carecen de formalismo
matemático en su representación. Por ejemplo, para conducir un coche se requiere un
modelo mental o intuitivo sobre el efecto que produce el movimiento del volante, pero
no es necesario caracterizar dicho efecto mediante ecuaciones matemáticas exactas.
• Modelos no paramétricos. Muchos sistemas quedan perfectamente caracterizados
mediante un gráfico o tabla que describa sus propiedades dinámicas mediante un
número no finito de parámetros. Por ejemplo, un sistema lineal queda definido mediante
su respuesta al impulso o al escalón, o bien mediante su respuesta en frecuencia.
• Modelos paramétricos o matemáticos. Para aplicaciones más avanzadas, puede ser
necesario utilizar modelos que describan las relaciones entre las variables del sistema
mediante expresiones matemáticas como pueden ser ecuaciones diferenciales (para
sistemas continuos) o en diferencias (para sistemas discretos).
Todo modelo matemático, por lo tanto, consta de una o varias ecuaciones que
relacionan la entrada y la salida, dichos modelos son más comúnmente conocidos como
modelos paramétricos, ya que pueden definirse mediante una estructura y un número finito
de parámetros.
2.4. Métodos de obtención de modelos.
Existen dos métodos principales para obtener el modelo de un sistema:
• Modelado teórico. Es la aplicación de una teoría general de interpretaciones de un
conjunto de teorias axiomaticas[37].
•
Identificación del sistema. Es la determinación sobre la base de la entrada y la salida, de un sistema dentro de una clase específica de sistemas, para el cuál el sistema bajoprueba es equivalente
El modelado teórico tiene un campo de aplicación restringido a procesos muy sencillos
de modelar, o a aplicaciones en que no se requiera gran exactitud en el modelo obtenido. En
muchos casos, además, la estructura del modelo obtenido a partir del conocimiento físico
de la planta posee un conjunto de parámetros desconocidos, que sólo se pueden determinar
experimentando sobre el sistema real. De ahí la necesidad de recurrir a los métodos de
identificación de sistemas.
En la práctica, lo ideal es recurrir a una mezcla de ambos métodos de modelado para
obtener el modelo final. El uso de datos reales para identificar los parámetros del modelo
provee a éste de una gran exactitud, pero el proceso de identificación se ve tanto más
facilitado cuanto mayor sea el conocimiento sobre las leyes físicas que rigen el proceso.
2.5. El proceso de identificación
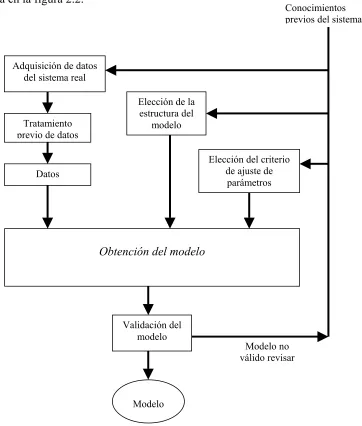
En términos generales, el proceso de identificación comprende los siguientes pasos[18]:
1. Obtención de datos de entrada - salida. Para ello se debe excitar el sistema mediante la
aplicación de una señal de entrada y registrar la evolución de sus entradas y salidas
durante un intervalo de tiempo.
2. Tratamiento previo de los datos registrados. Los datos registrados están generalmente
acompañados de ruidos no deseados u otro tipo de imperfecciones que puede ser
necesario corregir antes de iniciar la identificación del modelo. Se trata, por tanto, de
‘preparar’ los datos para facilitar y mejorar el proceso de identificación.
3. Elección de la estructura del modelo. Si el modelo que se desea obtener es un modelo
paramétrico, el primer paso es determinar la estructura deseada para dicho modelo. Este
punto se facilita en gran medida si se tiene un cierto conocimiento sobre las leyes
físicas que rigen el proceso.
4. Obtención de los parámetros del modelo. A continuación se procede a la estimación de
los parámetros de la estructura que mejor ajustan la respuesta del modelo a los datos de
entrada-salida obtenidos experimentalmente.
5. Validación del modelo. El último paso consiste en determinar si el modelo obtenido
satisface el grado de exactitud requerido para la aplicación en cuestión. Si se llega a la
conclusión de que el modelo no es válido, se deben revisar los siguientes aspectos como
posibles causas:
a. El conjunto de datos de entrada-salida no proporciona suficiente información sobre
la dinámica del sistema.
b. La estructura escogida no es capaz de proporcionar una buena descripción del
modelo.
c. El criterio de ajuste de parámetros seleccionado no es el más adecuado.
Los pasos anteriores pueden ser representados en forma de un diagrama, tal como se
muestra en la figura 2.2.
Conocimientos previos del sistema
Modelo
Modelo no válido revisar Validación del
modelo
Elección del criterio de ajuste de
parámetros Elección de la
estructura del modelo
Obtención del modelo Datos
Tratamiento previo de datos Adquisición de datos
[image:21.612.118.480.145.571.2]del sistema real
Figura 2.2. El proceso de identificación.
2.6.Métodos de identificación.
Existen diversos métodos de identificación, que pueden clasificarse según distintos
criterios[18]:
• Dependiendo del tipo de modelo deseado:
1. Métodos no paramétricos, que permiten obtener modelos no paramétricos del sistema
bajo estudio. Algunos de estos métodos son: análisis de la respuesta transitoria, análisis
de la respuesta en frecuencia, análisis de la correlación, análisis espectral, análisis de
Fourier, etc.
2. Métodos paramétricos, que permiten obtener modelos paramétricos. Estos métodos
requieren la elección de una posible estructura del modelo, de un criterio de ajuste de
parámetros, y por último de la estimación de los parámetros que mejor ajustan el
modelo a los datos experimentales.
Dependiendo del criterio de ajuste de los parámetros. Existen diversos métodos
matemáticos para ajustar los parámetros de una estructura a un conjunto de datos de
entrada-salida. Algunos de los más utilizados en el campo de la identificación son el
método de mínimos cuadrados y el método de las variables instrumentales.
2.6.1. Técnicas de identificación no paramétrica
Los métodos de identificación no paramétricos permiten obtener modelos o
representaciones no paramétricas de la planta bajo estudio.
Suponga el sistema de la figura 2.1. Considerando que el sistema es lineal, la relación entre
la salida del sistema y(t), su entrada u(t) y el ruido r(t) puede expresarse como la ecuación
(2.1):
1
( ) ( ) ( ) ( ) y t =G q− u t +r t
)
(2.1)
donde q-1 es el operador retardo y el producto G(q-1)u(t) representa la secuencia de la
ecuación 2.2.
1
1
( ) ( ) ( ) (
k
G q u t g k u n k
∞ −
=
=
∑
− (2.2)de (2.2) se define (2.3)
1
1
( ) ( )
k
G q g k q
∞
1
− −
=
=
∑
(2.3)La secuencia g(k) de la ecuación (2.3) se conoce como respuesta al impulso del
sistema, y coincide con la salida del mismo cuando a la entrada se aplica un impulso
unitario. Por otro lado, la función G(q−1) es la función de transferencia del sistema. Evaluando esta última a lo largo del círculo unidad (q−1 = e jω) se obtiene la llamada respuesta en frecuencia del sistema, G(ejω).
La respuesta al impulso es un modelo no paramétrico que se define en el dominio
del tiempo, mientras que la respuesta en frecuencia es una descripción no paramétrica en el
dominio de la frecuencia. Las principales ventajas de los métodos no parámetricos, es no
requerir un procesamiento complejo de los datos, y de ningún tipo de conocimiento previo
sobre la planta. El principal inconveniente es que en el modelo resultante los parámetros
del sistema no pueden ser obtenidos directamente.
2.6.2. Técnicas de identificación paramétrica
Los modelos paramétricos, a diferencia de los anteriores, quedan descritos mediante
una estructura y un número finito de parámetros que relacionan las señales de interés del
sistema (entradas, salida y perturbaciones). En muchas ocasiones es necesario realizar la
identificación de un sistema del cual no se tiene ningún tipo de conocimiento previo. En
estos casos, se suele recurrir a modelos estándar, cuya validez para un amplio rango de
sistemas dinámicos ha sido comprobada experimentalmente. Generalmente estos modelos
permiten describir el comportamiento de cualquier sistema lineal. La dificultad radica en la
elección del tipo de modelo (orden del mismo, número de parámetros, etc.) que se ajuste
satisfactoriamente a los datos de entrada-salida obtenidos experimentalmente.
2.6.3. Tipos de modelos parámetricos.
Generalmente los modelos paramétricos se describen en el dominio discreto, puesto que los
datos que sirven de base para la identificación se obtienen por muestreo. En el caso de que
se requiera un modelo continuo, siempre es posible realizar una transformación del dominio
discreto al continuo. La expresión más general de un modelo discreto se muestra en la
ecuación (2.4).
( ) ( ) ( )
s t =η t +w t (2.4)
donde w(t) es el término que modela la salida debida a las perturbaciones, η(t) la salida
debido a la entrada, y s(t) la salida medible del sistema. Cada uno de estos términos puede
desarrollarse como se muestra en las ecuaciones (2.5), (2.6) y (2.7).
1
( )t G q( ,θ) ( )u t
η = −
(2.5)
1
w t( )=H q( − ,θ) ( )r t (2.6)
1
( ) ( ,θ) ( )
s t = A q− y t (2.7)
donde q-1 es el operador retardo, θ representa un vector de parámetros, u(t) y r(t) son la
entrada al sistema y el ruido de entrada al mismo respectivamente, e y(t) es la salida de
interés del sistema (que puede no coincidir con la salida medible). Tanto G(q-1,θ) como H(q
-1,θ) son cocientes de polinomios como se expresa en la ecuación (2.8) y (2.9).
1 1
1
1 1 2
1 1 2
1 2 1 ... ( ) ( ,θ) ( ) ...
nk nk nk nb nb
nf nf
b q b q b q
B q G q
F q f q f q f q
− − − − − + − − − − − + + + = =
+ + + + − (2.8)
1 2 1
1 1 2
1 1 2
1 2 1 1 ... ( ) ( ,θ) ( ) ... nc nc nd nd
c q c q c q
C q H q
D q d q d q d q
− − − − − − − − + + + + = = + + + + − − (2.9)
G(q-1,θ) es la parte deterministica y H(q-1,θ) es la parte estocastica del sistema.
y A(q-1,θ) un polinomio como se muestra en la ecuación (2.10)
1 1 2
1 2
1
( ,θ) ... na
na
A q− = +a q− +a q− + +a q (2.10)
El vector de parámetros θ contiene los coeficientes ai, bi, ci, di y fi de las funciones de
transferencia mostradas en las ecuaciones 2.8, 2.9 y 2.10. La estructura genérica de estos
modelos basado en la ecuación 2.4. es como se muestra en la ecuación 2.11.
1 1
1 1 1
1
B q C q
A q y t G q u t H q t u t r t
F q D q
− −
− − −
− −
= + = ( ) + ( )
( ) ( ) ( ,θ) ( ) ( ,θ) r( ) ( ) ( )
( ) ( 1) (2.11)
Para elegir la estructura de este tipo de modelos hay que determinar el orden de
cada uno de los polinomios anteriores, es decir na, nb, nc, nd, nf y el retardo entre la
entrada y la salida nk. Una vez elegidos estos valores, sólo queda determinar el vector de
coeficientes θ (ai, bi, ci, di y fi ) que hacen que el modelo se ajuste a los datos de
entrada-salida del sistema real[18].
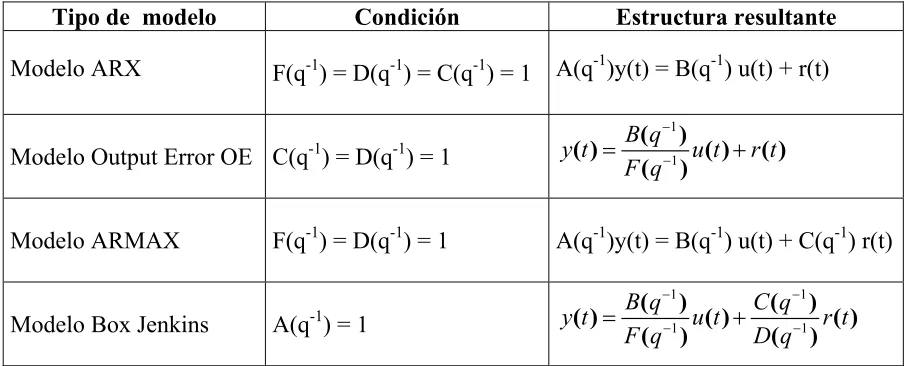
En muchos casos, alguno de los polinomios mostrados en las ecuaciones anteriores
[image:25.612.80.532.129.312.2]no se incluye en la descripción del modelo, dando lugar a las estructuras mostradas en la
tabla 2.1.
Tipo de modelo Condición Estructura resultante
Modelo ARX F(q-1
) = D(q-1) = C(q-1) = 1 A(q-1)y(t) = B(q-1) u(t) + r(t)
Modelo Output Error OE C(q-1) = D(q-1) = 1
1
1 B q
y t u t r t
F q
− −
= ( ) +
( ) ( ) ( ) ( )
Modelo ARMAX F(q-1) = D(q-1) = 1 A(q-1)y(t) = B(q-1) u(t) + C(q-1) r(t)
Modelo Box Jenkins A(q-1) = 1
1 1
1 1
B q C q
y t u t r t
F q D q
− −
− −
= ( ) + ( )
( ) ( ) ( ) ( ) ( )
Tabla 2.1. Diferentes estructuras de modelos paramétricos.
La anulación de alguno de los polinomios, resulta en estructuras simplificadas, que
facilitan el proceso de ajuste de parámetros. Cada una de las estructuras (ARX, ARMAX,
OE o BJ) tiene sus propias características y debe ser elegida fundamentalmente en función
del punto en el que se prevé que se añade el ruido en el sistema. En cualquier caso, puede
ser necesario ensayar con varias estructuras y con varios órdenes dentro de una misma
estructura hasta encontrar un modelo satisfactorio[20].
2.6.3.1.El modelo ARX
El modelo ARX mostrado en la tabla 2.1 es la forma más simple de incorporar una
señal de excitación a la estructura del modelo. La estimación usando el modelo ARX,
puede ser expresada por la solución de ecuaciones analíticas mediante regresión lineal.
Además, la solución es única. En otras palabras, la solución siempre satisface el minimo
global de la función de costo. El modelo ARX presenta como deventaja que si el disturbio
r(t) no es ruido blanco entonces el modelo proporciona errores en la estimación (BIAS).
En el presente trabajo se realiza la estimación de los parámetros del motor de
Corriente Directa de excitación separada, usando el modelo ARX, el cual queda
expresado como en la ecuación 2.12, considerando el sistema deterministico.
1
( ) ( ) ( ) (
3
Algoritmo de
Steiglitz-McBride
Una vez elegida la estructura del modelo ARX, es necesario determinar el valor de los
parámetros del mismo que ajustan la respuesta del modelo a los datos de entrada - salida
experimentales. Ha sido probado que para casos de modelos con suficiente orden el
algoritmo de Steiglitz-Mcbride lleva una estimación correcta(UNBIASED), si el error
medido es blanco[12].
3.1. Selección del método de ajuste
3.1.1. Error de predicción o error del modelo.
La estimación de los parámetros del modelo seleccionado se basa en la
minimización del error de predicción. Se conoce como error de predicción ε(t,θ) a la
diferencia entre la salida estimada por un modelo y la salida real del sistema en un
determinado instante de tiempo. Tal como se expresa en la ecuación 3.1.
e
t y t y t
ε( ,θ)= ( ) - ( ,θ) (3.1)
donde ye(t, θ) es la salida estimada por el modelo en el instante t.
3.1.2. Regresión Lineal.
Los valores de entrada-salida disponibles para la estimación de los parámetros del
modelo, son valores pasados que fueron muestreados. Se dice que una estructura posee
regresión lineal cuando la salida estimada puede expresarse como una relación entre estos
valores muestreados tal como se muestra en la ecuación 3.2[27].
( ) T( )θ
e
y t =ϕ t (3.2)
donde ϕT(t) es un vector columna formado por las salidas y entradas anteriores (conocido
como vector de regresión), y θ es el vector de parámetros del modelo.
El modelo ARX elegido para la estimación de parámetros es un claro ejemplo de
estructura con regresión lineal, como se muestra en la ecuación (3.3) y (3.4).
[
1 2 ... 1 ...]
T na nb
a a a b b
θ = (3.3)
[
1 1]
( ) ( ) ... ( ) ( ) ... ( )
T
t y t y t na u t nk u t nk nb
ϕ = − − − − − − − + (3.4)
3.1.3. Selección del algoritmo de ajuste de parámetros.
Cuando de realiza una estimación o ajuste de parámetros, el punto de partida es la
consideración de cómo se obtendrá la información entrada-salida del modelo, esto es, si la
obtención de dicha información será en línea (operación normal del sistema) ó fuera de
línea (en reposo), lo cual dictará en gran parte la selección del método de ajuste[20].
1. Método fuera de línea.
•
•
•
•
Observa el estado físico la entrada-salida del sistema sobre un periodo de tiempo
definido.
Estima los parámetros del sistema basado en un conjunto de datos obtenidos, esto es, se
realiza un post-procesamiento de la información.
2. Método en línea.
Estima los parámetros, en forma simultánea con los cambios fisicos del sistema.
El procesamiento de los datos es en forma recursiva y en tiempo real.
Basándose en las definiciones anteriormente mostradas, y dado que se plantea mostrar
en el presente trabajo la aplicación del algoritmo de Steiglitz-Mcbride para la estimación de
modelos ARX con estructura de regresión lineal, se usará el método fuera de línea de
Steiglitz-Mcbride, el uso de método fuera de línea es por que los parámetros que se
obtendrán serán utilizados para modelar la dinámica del motor de C.D. únicamente, y no
son requeridos para un procesamiento en tiempo real, como en un control adaptable.
3.2. Algoritmo de Steiglitz-Mcbride.
El método de Steiglitz-Mcbride es una técnica muy popular para la identificación de
sistemas lineales descritos por ecuaciones de diferencias [9], es esencialmente un
procedimiento fuera de línea, y es atractivo particularmente por ser un esquema de
iteraciones simples. Esta técnica iterativa consiste en identificar un sistema lineal usando
muestras de su entrada y salida en la presencia de ruido, aplicando mínimos cuadrados
entre la respuesta del sistema real y la respuesta del sistema estimado.
3.2.1. Obtención del algoritmo.
Considere el sistema discreto en la ecuación (3.5) que representa un modelo ARX
[10].
1
1 B q
y t u t r t
A q
− −
= ( )
( ) ( ) ( )
( ) + (3.5)
donde y(t) es la salida al tiempo t, u(t) la entrada, r(t) un proceso estocástico de orden finito,
con media cero actuando como un disturbio q-1 es el operador de retardo unitario y A(q-1) y B(q-1) son polinomios de la forma que se muestra en las ecuaciones (3.6) y (3.7).
1 1
1
1
( ) ... na na
A q− = +a q− + +a q− (3.6)
1 1 1
( ) ... nb nb
B q− =b q− + +b q−
)
(3.7)
Se asume que A(q-1) tiene todos sus ceros están estrictamente dentro del círculo unitario, además se considera también que la entrada u(t) y el disturbio r(t) son
independientes [12]. El problema a resolver será entonces la estimación de los parámetros
de 1 y
(
A q− 1
( ) B q− .
La estimación se realiza mediante la minimización del error entre la salida estimada
con los parámetros obtenidos y la salida observada del sistema, tal y como se muestra en la
ecuación (3.8)
2 1 1 1 N t B q
E t y t u t
A q − − = −
∑
( ) ( ) = min ( ) ( )( ) (3.8)
donde N es el número de datos.
Desgraciadamente la ecuación (3.8) es un problema de regresión altamente no
lineal, y la solución es algo compleja, el algoritmo de Steiglitz-Mcbride presenta una
técnica para obtener una minimización para la ecuación (3.8) realizando minimizaciones
iterativas, reduciendo el problema a la solución de un conjunto de ecuaciones analiticas.
Como se menciona en [9], el algoritmo propuesto heuristicamente por
Steiglitz-Mcbride para la obtención de los parámetros es iterativo, esto es, si son
las estimaciones obtenidas en la iteración k entonces la estimación mejorada será
que se obtienen de resolver la ecuación (3.9) que plantea el problema
de mínimos cuadrados[10].
1 1 ( ), (
k k
A q B q
∧ ∧ − ) − 1 ) − 1 1( ), 1(
k k
A q B q
∧ ∧ − + + 2 1 1 1 1 1 1 1 1 1 N k k t k k
E t A q y t B q u t
A q A q
∧ ∧ − − + ∧ + ∧ − − = −
∑
( ) = min ( ) ( ) ( ) ( )
( ) ( ) c f d g d g d g d g d g d g e h (3.9)
donde N es el número de datos, y los términos
1 1 ( ) ( ) k y t A q ∧ − y 1 1 ( ) ( ) k u t A q ∧ − representan
la operación de prefiltrado planteado por el algortimo.
Los grados de son denotados por y , respectivamente, y
pueden ser diferentes de los grados y . Ahora para lograr que los parámetros sean
identificables se considera que los polinomios del sistema a identificar y el filtro adaptivo
que cumplan con lo mostrado en la ecuación (3.10), esto es que el modelo estimado tenga
un orden suficiente[10].
1
( ) (
k k
A q y B q
∧ ∧ − na 1 ) − 0 ≥ n a ∧ n b ∧ nb
n* min(na na nb nb, )
∧ ∧
= − − (3.10)
Se considerá la notación mostrada en la ecuación(3.11), que representa el vector de
parámetros verdaderos y la ecuación (3.12) la estimación en la k-ésima iteración.
[
1 1]
*
... na; ... nb T
a a b b
θ = (3.11)
1 1
T k k k k
na nb k a a b b
θ∧ ∧ ∧∧ ∧ ∧∧
=
... ; ... (3.12)
además se consideró también el vector de regresión mostrado en la ecuación (3.13) que se
plantea basado en la ecuación (3.3)
1 1 1 1 1 ( , ) ( ) ... ( ) ( ) ( ) T k k k
t y t
A q A q
ϕ θ∧ ∧ ∧ ∧ − − = − − − −
y t n a
1 1 1 1 1 ( ) ... ( ) ( ) ( ) T k k
u t u t n b
A q A q
∧ ∧ ∧ − − −
− (3.13)
Aplicando la regresión lineal, con el vector de regresión planteado se obtiene la
solución al problema cuadrático descrito en la ecuación (3.9), tal como se expresa en la
ecuación (3.14)[9].
1
1
1
1 1
1 ˆ ˆ 1 ˆ
( , ) ( , ) . ( , ) ( ) ˆ ( )
N N
T
k k k k
t t
t t t y t
N N A q
θ ϕ θ ϕ θ ϕ θ − ∧ + − = = 1 =
∑
∑
(3.14)La ecuación (3.14) representa el vector de parámetros que minimiza el error
cuadrático medio propuesto y es el objeto de implentación en el presente trabajo, que como
se mencionó será para estimar los parámetros de un motor de C.D.
3.2.2. Propiedades de convergencia del algoritmo de Steiglitz-Mcbride.
El algoritmo de Steiglitz-Mcbride fuera de línea [9]-[10] calcula la estimación θk 1
∧ +
minimizando la ecuación (3.9), para cononocer las propiedades de convergencia del método
es necesario analizar tres conceptos: (1). Puntos de Posible convergencia (2). Propiedades
de convergencia local (3). Propiedades de convergencia global, las anteriores se explican a
continuación[10].
3.2.2.1.Puntos de posible convergencia
Los puntos fijos de convergencia que nos interesan son los parámetros generados en la
ecuación (3.14). A fin de evitar un comportamiento probabilistico se tomará que N tienda a
infinito. Con la consideración anterior las covarianzas de muestreo que aparecen en la
ecuación (3.14) tienden con probabilidad de uno a las correspondientes covarianzas
teoricas, por lo tanto la ecuación (3.14) se convierte en la ecuación (3.15)
1 1 1 1 ˆ ˆ ˆ ( , ) ( , ) . ( , ) ( ) ˆ ( ) T
k t k t k t k y
A q
θ∧ + = Ε ϕ θ ϕ θ − Εϕ θ − t
(3.15)
donde E representa la esperanza asociada a la covarianza.
Ahora rescribimos la ecuacióm (3.15) como la ecuación (3.16)
1
1 ( , ˆ ) ( , ˆ ) ( , ˆ ) ( , )
T
k k t k t k t k t ˆk
θ∧ + =θ∧ + Ε ϕ θ ϕ θ − Εϕ θ ε θ (3.16)
donde 1 1 1 ˆ 1 ( ˆ ˆ ˆ ( , ) ( ) ( , ) ( ) ( ) ˆ( ) ˆ( ) T
k k k
B q
t y t t y t
A q A q
ε θ = − −ϕ θ θ = − −− )u t
)
(3.17)
La inversa de la ecuación (3.15) existirá si tiene todos sus
ceros fuera del círculo unitario y si la señal de entrada es perisistente de orden . Es claro
de la ecuación (3.16) que los limites posibles
1
ˆ ˆ
( ,t k) ( ,t k)T
ϕ θ ϕ θ −
Ε
A qˆ ( −1
nb
∧
θ∧ de θk
∧
cuando k tiende a infinito debera
satisfacer la ecuación (3.18).
ˆ ˆ
( , ) ( , )t t 0
ϕ θ ε θ
Ε = (3.18)
la ecuación (3.18) pude ser reescrita como la ecuación (3.19).
1 1 1 1 1 ( ) ˆ( ) ˆ( )
( ) ( ) 0
ˆ
1 ( )
( ) ˆ ( )
y t i
A q B q
E y t
A q
y t j
A q − − − − −
− u t =
− 1 ) − 1 ) (3.19)
donde 1 i na 1 j nb
∧ ∧
≤ ≤ , ≤ ≤
De lo anteriormente planteado tenemos los siguientes resultados[10].
a. Considerando que u(t) es peristente de orden y que el
disturbio r(t) en la ecuación (3.5) es ruido blanco, existe una solución única o puntos
fijos de convergencia. Entonces la solución de la ecuación (3.19) esta dado por las
ecuaciones (3.20) y (3.21).
m na nb nb na
∧ ∧
=max( + , + )
1 1
ˆ ( ) ( ) (
A q− = A q− L q (3.20)
1 1
ˆ ( ) ( ) (
donde L q( −1)= +1 l q1 −1+ +... l qn* −n*
0
es un polinomio arbritario restringido
unicamente a tener todos sus ceros fuera del círculo unitario.
b. Si el ruido r(t) no es blanco la ecuación (3.19) no tiene solución única de la forma expresada en las ecuaciones (3.20) y (3.21). La demostración esta disponible en
[10].
3.2.2.2.Propiedades de convergencia local
Ahora se procede a analizar la convergencia del método de aproximación a los
puntos estacionarios. Si n , entonces los puntos estacionarios no son aislados.
Entonces, para n no podemos esperar convergencia local a un punto estacionario
definido. Todo lo que podemos probar aquí es que
>
*
0
>
*
ˆ ˆ
infθ∈D θk →θ →0 cuando k , donde D es el conjunto de puntos estacionarios. Por simplicidad en lo consecutivo se
asumirá que , esta consideración no es restrictiva sino un punto de vista. En la
práctica normalmente en la estimación de parámetros los valores de y
→ ∞
nb n* =0
na
∧ ∧
son
incrementados sucesivamente hasta que se obtiene un modelo significativo. Teóricamente
el modelo es obtenido cuando n* =0. Bajo esta consideración la obtención del vector de
parámetros verdaderos θ*
esta limitado. Para la convergencia local tenemos el siguiente
resultado:
• Sea la entrada u(t) persistente con orden na nb
∧ ∧
+ , entonces la aproximación a el
vector de parámetros θ*será estimada esta dada por la ecuación (3.16) satisface a la
ecuación (3.22).
* *
1 1 1
(θk θ ) F(θk θ ) o( θk θ* )
∧ ∧ ∧
+ − = + − + + − (3.22)
donde *
1
( k
o θ θ )
∧
+ − tiende a cero mas rápido que , y F es una matriz con valores
propios λ que satisfacen 0 < λ < 1, además F tiene precisamente valores propios
en el origen. La demostración completa esta en [10].
nb
∧
3.2.2.3.Propiedades de convergencia global.
Para el procedimiento de Steiglitz-Mcbride la estabilidad de las estimaciones esta
relacionada con las propiedades de estabilidad del modelo de minimos cuadrados. El
método de minimos cuadrados puede dar modelos inestables, aun cuando el sistema
identificado fuera asintóticamente estable. Como consecuencia la recursión de la ecuación
(3.16) no siempre converge globalmente. Entonces las condiciones suficientes que
garantizen la convergencia global de la recursión en la ecuación (3.16) a los verdaderos
parámetros deben ser[10]:
a. La SNR( razón de señal a ruido) sea los suficientemente grande.
b. na na 1.
∧
= =
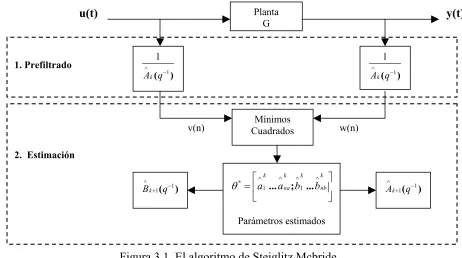
3.2.3. Desarrollo del algoritmo.
El algoritmo de Steiglitz.Mcbride como se mencionó se basa sobre un prefiltrado de
los valores de entrada y salida como se plantea en la ecuación (3.8) y puede ser expresado
de forma simple en la figura 3.1, en la cuál se plantean 2 pasos en su implentación.
Planta G
1
1
( )
k
A q ∧
− 1
1
( )
k
A q ∧
−
1 1( )
k
B q
∧ −
+ Ak 1(q 1)
∧ − +
u(t) y(t)
1. Prefiltrado
Mínimos Cuadrados
1 1
*
... ; ...
k k k k na nb
a a b b θ = ∧ ∧ ∧ ∧
Parámetros estimados 2. Estimación
[image:33.612.78.540.404.662.2]w(n) v(n)
Figura 3.1. El algoritmo de Steiglitz.Mcbride
3.2.3.1. Prefiltrado(Algoritmo de Prony)[27].
El primer paso en la estimación es la implementación del algoritmo de Prony, el
cual inicia considerando en forma general un filtro IIR dado por la ecuación de
transferencia en la ecuación (3.23).
1 0 1 1 1 1 ... ( ) ( ) ( ) ... nb nb na na
b b z b z
B z H z
A z a z a z
− − −
+ + +
= =
+ + + − (3.23)
Ahora se encuentra la respuesta al impulso de h(n) que esta relacionado a H(z) por
la transformada Z y se expresa en la ecuación (3.24).
0
( ) ( ) n
n
H z h n z
∞
− =
=
∑
(3.24)Rescribiendo la ecuación 3.23 se puede escribir de la forma mostrada en la ecuación 3.25.
( ) ( ) ( )
B z =H z A z (3.25)
La cuál es la versión de la transformada Z de la convolución. Esta convolución
puede ser escrita en forma matricial. Usado el primer K+1 término de la respuesta al
impulso, se tiene la ecuación (3.26).
0 0
1 0 1
2 1 0 1
2
2
0 0 0
0 1 0 0 . . . . . . . . . . . . . . . . nb nb . .
K na na k
h b
h h
b
h h h a
b a h b h a h − = (3.26)
Para desacoplar el cálculo de y se particionan las matrices tal como se muestra en la
ecuación (3.27).
na
a bnb
H b
h H a
=
1
1 2
1
0 (3.27)
donde b es el vector nb+1 de coeficientes del numerador de la ecuación (3.23), a es el vector de los coeficientes de denominador (a0 = 1), h1 es el vector de los últimos K-nb
términos de la respuesta al impulso, es la partición (nb+1) por (na+1) de la ecuación
(3.26), y es el (K-nb) por na remanente. Las (K-nb) ecuaciones mas bajas se escriben
como en la ecuación (3.28).
1 H
2 H
h H
h H a
= +
= −
1 2
1 2
0 a
(3.28)
la cuál deberá ser resuelta para a aplicando mínimos cuadrados.
Las (nb+1) ecuaciones mas altas de la ecuación (3.27) se escriben en la ecuación (3.29).
b=H a1 (3.29)
la cuál permite calcular b(para el caso del prefiltrado el único valor de b será b0 = 1), que
son los coeficientes del numerador de la función de transferencia de la ecuación (3.23).
Mediante las ecuaciones (3.28) y (3.29) obtenemos la estimación del prefiltrado que se
usará en el algoritmo de Steiglitz-Mcbride [27].
3.2.3.2.Estimación[27].
Una vez estimado el prefiltrado se tiene un modelo como el que se muestra en la ecuación
(3.30), que para efectos de nuestro algoritmo será considerado como un filtro.
1 1
1 1
1
( )
( ) ... na na
z
A z a z a z
α ∧ ∧ ∧
− −
= =
+ + + (3.30)
Lo siguiente será aplicar la entrada u(n) que es la señal muestreada de u(t) y la
señal de salida y(n) que es la señal muestreada de y(t), cada una a un filtro α( )z obteniéndose dos nuevas señales v(n) y w(n) respectivamente, que se usarán en el siguiente
paso de estimación tal como se muestra en la figura 3.2.