Lab. No.6 – LGR, Criterio de Nyquist, margen de ganancia y fase. 1
UNIVERSIDAD FRANCISCO DE PAULA SANTANDER FACULTAD DE INGENIERIA
CONTROL AUTOMATICO
LABORATORIO No. 6 – Lugar geométrico de las raíces LGR, Criterio de
Nyquist, margen de ganancia y fase
INSTRUCCIONES
1- Las actividades de laboratorio y talleres deberán ser desarrollados en grupos de hasta 2 (dos) alumnos. 2- Las técnicas y herramientas didácticas que se empleen en los laboratorios tiene como finalidad el refuerzo,
la conformación y ejecución de los diferentes aspectos que hacen parte de la asignatura. De forma que el alumno desarrolle un pensamiento flexible, dinámico, audaz, independiente, persistente, divergente y original en su formación como profesional.
OBJETIVO
• Aplicar los comandos de Matlab para analizar un sistema de control por lugar geométrico de las raíces.
• Junto con la teoría vista en clase y el buen uso de los comandos de Matlab se adquirirá la
competencia para analizar en el dominio de la frecuencia un sistema aplicando el Criterio de
Nyquist para determinar la estabilidad y los Márgenes de Ganancia MG y de Fase MF en una
gráfica en coordenadas polares (Diagrama Polar de Nyquist).
REFERENCIAS
1- Andrew Knight Basics of MATLAB and Beyond. Chapman and Hall/CRC; 1 edition, 1999. 2- Hanselman, D.; Littlefield, B. MATLAB 5: Versão do Estudante, Guia do Usuário, Makron
Books, 1999.
3- White Robert: Computational Mathematics: Models, Methods, and Analysis with MATLAB
and MPI. Chapman and Hall/CRC; 1 edition, 2003.
ACTIVIDAD PREVIA - MARCO TEORICO
PRIMERA PARTE
MARCO TEÓRICO
La característica dinámica de la respuesta transitoria de los sistemas de control de lazo cerrado, está estrechamente ligada a la ubicación de los polos de lazo cerrado. El diagrama de bloques en forma general de un sistema de control es:
Al término del denominador se le llama ecuación característica y las raíces de esta ecuación característica (polos de lazo cerrado) son las que tienen información sobre el comportamiento de la
respuesta transitoria del sistema.
1+G(S)H(S) = 0
Si el sistema tiene una ganancia variable, la ubicación de los polos de lazo cerrado depende del valor de la ganancia elegida. Si la ganancia de la función G(S)H(S) la hacemos variar, tenemos diferentes ecuaciones características y por lo tanto diferentes raíces.
El señor W.R. Evans desarrolló un método simple para hallar las raíces de la ecuación característica, este método es denominado método del lugar de las raíces. El método del lugar de las raíces consiste en graficar todas las raíces de la ecuación característica al variar la ganancia de cero hasta infinito.
El método del lugar de las raíces permite hallar los polos de lazo cerrado (raíces de la ecuación característica), partiendo de los polos y ceros de lazo abierto G(S)H(S) tomando la ganancia como parámetro.
La idea básica del método consiste en encontrar los valores de S que hacen que la función de transferencia de lazo abierto sea.
G(S)H(S) = −1
Si existe un punto en el plano S que satisfaga las siguientes condiciones, ese punto es una raíz de la ecuación característica o polo de lazo cerrado.
Condición de ángulo: ∠G(S)H(S) = ±180 (2n +1) donde n = 0,1,2,3...
Condición de magnitud: |G(S)H(S)| = 1
Al diseñar un sistema de control lineal, este método resulta muy útil, pues indica la forma en que hay que modificar la posición de los polos y ceros de lazo abierto para que la respuesta cumpla con las especificaciones de comportamiento de sistema.
DESARROLLO
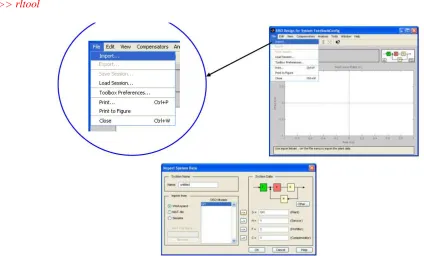
Utilizaremos el comando rltool para graficar el Lugar Geométrico de las Raíces. Al teclear rltool nos mostrará la siguiente ventana
>>rltool
Lab. No.6 – LGR, Criterio de Nyquist, margen de ganancia y fase. 3
Donde G es la función de transferencia de la planta, H es la función de transferencia de retroalimentación, C es la función de transferencia del compensador o controlador, F es la función de transferencia que está en cascada con el lazo cerrado, al inicio los bloques C, G, H y F son unitarios.
Podemos tener retroalimentación negativa o positiva dando un clic con el mouse en +/-. En este caso para poder modificar cada valor del diagrama de bloques tenemos que abrir la opción del menú File y posteriormente vamos a elegir la opción Import y elegimos la opción WorkSpace (ya que podemos insertar
desde MAT-file y simulink). Esta ventana nos proporciona varias opciones de configuración como lo son System Name, Import from y System Data, en donde ésta última opción nos muestra el mismo diagrama de
bloques mostrado en un inicio(hay forma de cambiar el diagrama con la opción Other…), bien, para poder trabajar en nuestro diseño de control debemos de importar desde WorkSpace la función de transferencia que queremos trabajar, que como se dijo anteriormente hay varias formas de importarla, (formada con el comando zpk) y colocarla en la planta, ya que podemos dejar los demás bloques con un valor unitario para facilitar el análisis de nuestro sistema, para después trabajar directamente desde el LGR. A continuación se muestra la ventana desde donde se importaran las funciones de transferencia:
Ejemplo
Sea la siguiente función de transferencia realizar un análisis para 20% de Sobrepaso:
Primeramente vamos a abrir Matlab en la sección del comand windows, luego dentro del worksapce formamos nuestra función de transferencia con el comando zpk.
GH=zpk([ ],[0 -1 -2 -3],[1])
Zero/pole/gain: 1
--- s (s+1) (s+2) (s+3)
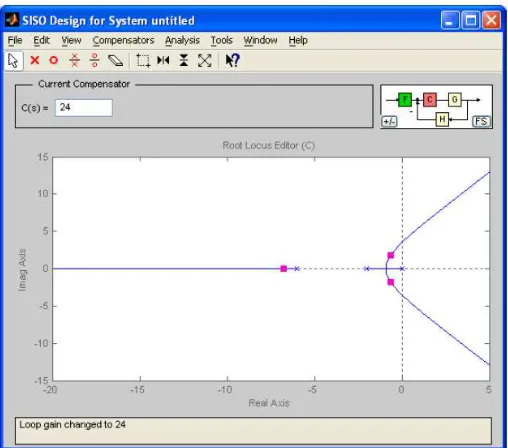
Ya estando en el Lugar Geométrico de las Raíces (LGR) podemos observar varios íconos en la cual nos mostrará con una cruz la ubicación de los polos de lazo abierto, y con un cuadro la ubicación de los polos de lazo cerrado que corresponde a la ganancia especificada en Gain, estos polos de lazo cerrado se pueden mover utilizando el mouse y correspondería a otro valor de ganancia, también podemos darle un valor de ganancia en Gain y nos mostrará la ubicación de los polos de lazo cerrado para esa ganancia.
Para conocer los valores exactos de los polos de lazo cerrado, nos dirigimos a view en la barra de menú y seleccionamos Closed-Loop Poles.
Podemos mover los polos o ceros de lazo abierto utilizando el click izquierdo del mouse y ver como se modifica el lugar de las raíces. También podemos borrar o agregar polos o ceros al sistema original utilizando los siguientes iconos:
Agrega polos reales y complejos en la posición deseada.
Agrega ceros reales y complejos en la posición deseada.
Lab. No.6 – LGR, Criterio de Nyquist, margen de ganancia y fase. 5
Al dar un clic derecho dentro del LGR seleccionamos Grid nos mostrará en el lugar de las raíces las rectas de relación de amortiguamiento constante δ y círculos de frecuencia natural wn . Así como la siguiente figura:
Por ejemplo, si se desea analizar la respuesta en el tiempo a una entrada escalón unitario con un sobrepaso de un 20%, se haría lo siguiente. Un 20% de sobrepaso equivale a una relación de amortiguamiento de
Nos dirigimos dentro de la ventana lugar de las raíces, haciendo click derecho con el mouse ingresaremos el factor de amortiguamiento requerido, también se puede colocar ωn, %Mp, entre otras y le asignamos el valor
Posteriormente…
Esto va a trazar una recta de relación de amortiguamiento δ=0.456 en el lugar de las raíces, a continuación
desplace los polos de lazo cerrado con el mouse hasta el cruce con la recta y obtenga el valor de la ganancia en Gain, este valor es 3.15 y wn = 0.588 rad/seg.
Lab. No.6 – LGR, Criterio de Nyquist, margen de ganancia y fase. 7
Ahora después de haber obtenido el LGR de nuestra función de transferencia con sus respectivas características, vamos a obtener la respuesta al escalón, nos dirigimos a la barra de menú en la opción
Análysis, Response to Step Command y mostrará una gráfica como sigue:
Podemos obtener información adicional de la gráfica; haciendo clic con el botón derecho del mouse sobre ella, nos mostrará la siguiente ventana.
Si seleccionamos systems podemos escoger entre la respuesta de lazo abierto, la respuesta de lazo cerrado, entre otras importantes opciones.
Finalmente tenemos nuestra Respuesta en el Tiempo a un Escalón Unitario del sistema y con sus respectivos tiempos, y mostrando el valor de %Mp comprobamos que nuestro diseño ha sido elaborado con éxito.
Ya que si queremos comprobar cada uno de los valores de la gráfica tenemos que usar las fórmulas siguientes:
TIEMPOS CALCULADOS:
a. Tiempo de elevación o crecimiento, tr, está dado por:
b. Tiempo pico, tp, está dado por:
c. Máximo sobrepaso, Mp, es igual a:
Lab. No.6 – LGR, Criterio de Nyquist, margen de ganancia y fase. 9
e. Tiempo de alcance Máximo
f. Para obtener beta
Para hacer modificaciones a la gráfica, como por ejemplo: unidades, estilo, características, entre otras funciones, nos vamos dentro de la gráfica en la barra de menú en la opción File, Toolbox Preferentes.
SEGUNDA PARTE
MARCO TEÓRICO
Para analizar el comportamiento de la salida de un sistema hay que tomar en cuenta dos parámetros, la Ganancia y la Entrada que al variarlos hacen que varíe ésta. Cuando un sistema es no lineal hay que tomar en cuenta los dos parámetros al mismo tiempo, pero si el sistema es lineal se puede aplicar el teorema de superposición de efectos y analizar el comportamiento del sistema con entrada fija y ganancia variable conociéndose como Análisis en el Dominio del Tiempo o con ganancia fija y entrada variable conociéndose como Análisis en el Dominio de la Frecuencia.
En el Análisis en el Dominio de la Frecuencia se toma un sistema lineal con una entrada y una salida como el del la Figura 1 con una entrada senoidal, siendo ésta la fundamental de cualquier señal de entrada variable, de amplitud fija y frecuencia variable tomándose datos resultantes de la senoidal de salida la relación de la salida a la entrada |G(jω)|=|C(jω)/R(jω)| y el desfasamiento de la salida con respecto a la entrada ΦG(jω)
graficándolos en coordenadas polares Figura 2 o en coordenadas rectangulares semilogarítmicas Figura 3.
Fig. 1.- Sistema lineal con una entrada senoidal r(t), (magnitud fija y frecuencia variable) y una salida senoidal c(t) (otra magnitud de la entrada, misma frecuencia de la entrada y desfasada
[image:9.595.176.420.662.743.2]Fig. 2.- Gráfica en Coordenadas Fig. 3.- Grafica en Coordenadas Polares Semilogarítmicas
La estabilidad de los sistemas lineales depende de la posición de las raíces de la Ecuación Característica en el Plano s, la cual para que el sistema sea estable se requiere que todas las raíces de la Ecuación Característica estén en la mitad izquierda del Plano s, con una sola en la mitad derecha el sistema se comportaría como inestable, esto nos dice que todas las raíces de la Ecuación Característica deben tener parte real negativa. Nyquist para verificar esta situación utilizó un principio matemático del mapeo en variable compleja que con el tiempo se conoció como el criterio de Nyquist, forma en que Nyquist verificaba la existencia de raíces de la Ecuación Característica en la mitad derecha del Plano s, que a continuación se describe.
La variable compleja es una letra que puede tomar cualquier valor del conjunto de los números complejos, estos son los que están compuestos por una parte real y otra imaginaria. La variable compleja por excelencia para el campo que abarca el control automático es la “s” o parámetro de Laplace que es s=σ+jω la cual por
su naturaleza deberá representarse en un plano el Plano Complejo “s” Figura 4. La función de una variable compleja también toma un valor complejo y por lo tanto también deberá representarse en un plano Complejo
F(s) Figura 5. Como toda función la función de variable compleja F(s) tiene un dominio, Plano “s” de la Figura 4, un rango, Plano F(s) de la Figura 5, y una fórmula para pasar del Plano “s” al Plano F(s) como se
muestra en la Figura 6. La fórmula de para pasar de un plano al otro está formada por la multiplicación de los factores de “s” que resultan de las raíces con el signo cambiado. El Mapeo es pasar puntos de un plano al otro a través de la fórmula, una trayectoria es una sucesión de puntos seguidos, si tenemos una función de variable compleja con dos raíces y una está dentro de una trayectoria cerrada en el plano “s” y la otra no, la aportación al mapeo, cuando se recorre la trayectoria cerrada, de la raíz dentro de la trayectoria será un trayectoria cerrada, de forma desconocida, alrededor del origen del plano F(s) y la otra raíz describirá una trayectoria abierta como se muestra en la Figura 7.
[image:10.595.142.456.566.732.2]
Lab. No.6 – LGR, Criterio de Nyquist, margen de ganancia y fase. 11
[image:11.595.136.458.61.421.2]Fig. 6.- Mapeo del Plano “s” al Plano F(s)
Fig. 7.- Mapeo de una trayectoria cerrada con una raíz adentro
[image:11.595.84.509.537.721.2]Nyquist para aplicar el principio de la Figura 7 a la determinación de la estabilidad de sistemas de control lineales tubo que idear una trayectoria que abarcara la mitad derecha del Plano “s” y mapearla al plano 1 + GH(s) para que sí al recorrer la trayectoria del Plano “s” se obtuviera una trayectoria cerrada alrededor del origen en el plano 1 + GH(s) quiere decir que hay raíces en la mitad derecha del Plano “s” y por lo tanto el sistema es inestable. Como se demostró es más simple trabajar con GH(s) por lo que se mapeo del plano 1 + GH(s) al plano GH(s) y el origen quedó en –1 + j0 por lo que ahora para determinar estabilidad es necesario buscar trayectorias cerradas alrededor de este punto, como se muestra en la Figura 8.
Fig. 8.- Mapeo de planos para determinar estabilidad.
Encerrar con una trayectoria cerrada a-1+j0 en el plano GH(s) equivale a inestabilidad
ω ω
∞ se infiere por la dificultad matemática y las probables indeterminaciones. Ya que se obtuvo la parte de la gráfica especificada con anterioridad se busca el valor cuando la gráfica cruza el eje real negativo, o sea 180°, y si la magnitud es menor a la unidad el sistema es estable de lo contrario sería inestable.
Existen dos parámetros que nos dan una idea clara de la calidad del sistema de control y nos sirven para diseñar y hacer comparaciones entre los sistemas de control automático lineal, siendo estos el Margen de
Ganancia MG y el Margen de Fase MF: El Margen de Ganancia MG se define como el numero máximo por
el cual se pude multiplicar la ganancia del sistema K sin que este se haga inestable. El Margen de Fase MF se define como la diferencia que existe entre el ángulo de desfasamiento real de salida con la entrada y el máximo que soporta sin que el sistema se haga inestable. Estos parámetros MG y MF se pueden medir del diagrama polar de Nyquist como se muestra en la Figura 9.
Fig. 9.- Medición del Margen de Ganancia MG y el Margen de Fase MF en el Diagrama Polar de Nyquist
DESARROLLO
Para ilustrar el uso de los comandos de MATLAB que construyan el diagrama polar de Nyquist y obtengan información de respuesta a la frecuencia de él utilizaremos como ejemplo la función de transferencia de lazo abierto de la Ec. (1) analizada parta diferentes valores de la ganancia K: K1=2.4, K2=24 y K3=240
El primer paso es activar dentro de MATLAB la herramienta rltool y cargar en K tres funciones de transferencia Ec.(2), Ec.(3) y Ec(4) y en cada uno de los casos obtener el Diagrama Polar de Nyquist, el Margen de Ganancia MG, el Margen de Fase MF, y la respuesta en el tiempo a un escalón unitario para realizando comparaciones concluir como afecta el comportamiento del sistema en el dominio del tiempo al variar los valores de la Ganancia K.
[image:12.595.201.411.215.434.2]Lab. No.6 – LGR, Criterio de Nyquist, margen de ganancia y fase. 13
Durante la sesión de laboratorio sólo realizaremos las acciones para la función de transferencia de la Ec. (3) las otras dos restantes se realizaran fuera y se incluirán en el reporte.
La carga de la función de transferencia se realiza importando la función desde el Workspace de Matlab, donde se crea la función de transferencia con el comando zpk como se muestra enseguida, en la Figura 10 se puede observar como se importa la función de transferencia desde el Workspace de Matlab al SISO design GUI del comando rltool utilizando el menú File y el comando Import, en la Figura 11 tenemos la gráfica del LGR requerido.
>> GH=zpk([],[0 -2 -6],[1])
Zero/pole/gain: 1
--- s (s+2) (s+6)
[image:13.595.59.483.468.724.2]>> rltool
Fig. 10.- Importando la función de transferencia desde el Workspace de Matlab al SISO design GUI
del comando rltool
(2)
(3)
Fig. 11.- Lugar Geométrico de las Raíces para la función de transferencia importada en la Figura 10.
[image:14.595.171.425.56.280.2]Una vez que se tiene el L.G.R. con el punto de operación con la ganancia requerida se procede a la construcción de la Gráfica Polar de Nyquist utilizando el menú Analysis con la opción Open-Loop Nyquist, como se muestra en la Figura 12, y obteniendo como resultado la gráfica de la Figura 13.
Fig. 12.- Utilizando el menú Analysis con la opción Open-Loop Nyquist para construcción de la
[image:14.595.91.503.373.571.2]Lab. No.6 – LGR, Criterio de Nyquist, margen de ganancia y fase. 15
Fig. 13.- Gráfica Polar de Nyquist
De la gráfica de la pantalla de la Figura 13 se pueden medir el Margen de Ganancia MG, como se muestra en la Figura 14 para obtener la Figura 15, que muestra los puntos indicadores de los Márgenes de Estabilidad, Margen de Ganancia MG con valor de 12 dB a una frecuencia de 3.46 rad/seg y el Margen de Fase MF con valor de 38.1° a una frecuencia de 1.54 rad/seg.
Fig. 14.- Gráfica Polar de Nyquist mostrando como obtener los puntos característicos que determinan
[image:15.595.63.497.387.577.2]Lab. No.6 – LGR, Criterio de Nyquist, margen de ganancia y fase. 17
EJERCICIOS DE REFUERZO COMO TRABAJO INDEPENDIENTE
EXTRACURRICULAR
EJERCICIOS CON rltool DE MATLAB
Haciendo uso del comando rltool haga lo siguiente.