ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
Dz
CONTROL ELECTRÓNICO PARA UNA PUERTA DE
ACCESO VEHICULAR VÍA INALÁMBRICA, CON DATOS
ENCRIPTADOS Y SENSORES PARA DETECTAR
OBSTÁCULOS Y MAL FUNCIONAMIENTO
dz
P R O Y E C T O
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
P
R
E
S
E
N
T
A
N
ESCAMILLA GUTIÉRREZ XÓCHITL
HERNÁNDEZ PACHECO MARIO ALBERTO
ASESORES:
ING. MARTÍNEZ SÁNCHEZ FERNANDO LAURO
ING. BARROETA ZAMUDIO CARLOS
2
ÍNDICE
Contenido
6
ÍNDICE DE
ILUSTRACIONES.
Ilustración 1 Sensor Ultrasónico ... 13
Ilustración 2 Caracteristicas Sensor SRF02 ... 14
Ilustración 3 Estructura sensor Fin de Carrera ... 15
Ilustración 4 Modelo Sensor Fin de Carrera... 16
Ilustración 5 Sensor Optico ... 16
Ilustración 6 Sensor optico en el prototipo ... 17
Ilustración 7 Partes principales de un motor de CA ... 18
Ilustración 8 Diagrama de arranque básico de un motor de CA ... 20
Ilustración 9 Diagrama de un sistema de engranes reductores de velocidad ... 22
Ilustración 10 Relación de engranaje ... 22
Ilustración 11 Diagrama de un motorreductor ... 23
Ilustración 12 Catarinas ... 24
Ilustración 13 Cadenas industriales ... 25
Ilustración 14 Adaptación de Catarina y cadena en nuestro motor ... 25
Ilustración 15 Contactor reversible ... 26
Ilustración 16 Conexion del contactor en el prototipo ... 27
Ilustración 17 diagrama de conexión de los contactores ... 27
Ilustración 18 Interruptor termomagnetico ... 28
Ilustración 19 Interruptores electromagneticos ... 29
Ilustración 20 Triac ... 30
Ilustración 21 Pcb de sistema de potencia para proteccion ... 31
Ilustración 22 Diagrama de sistema de protección... 32
Ilustración 23 PCB del sistema de proteccion en el prototipo ... 32
Ilustración 24 Electroiman ... 33
Ilustración 25 Circuito para acoplar el voltaje del electroiman ... 33
Ilustración 26 Diagrama de conexion de la estacion manual ... 34
Ilustración 27 Estación manual ... 35
Ilustración 28 Diagrama PIC 18F4550 ... 36
Ilustración 29 Conexion Xbee- PIC 18F4550 ... 37
Ilustración 30 Diagrama de Flujo Programa Principal ... 38
Ilustración 31 Diagrama de Flujo Rutina cerrar ... 39
Ilustración 32 Diagrama de Flujo Rutina Abrir ... 40
Ilustración 33 Diagrama para el control del sistema ... 41
Ilustración 34 Diagrama de Flujo de Encripcion del Dato ... 44
Ilustración 35 Topologia Estrella ... 50
7
Ilustración 37 Topologia Arbol ... 51
Ilustración 38 Capas Protocolo ZigBee ... 52
Ilustración 39 Estructura de un registro del ZigBee ... 54
Ilustración 40 Grupos de aplicaciones que están en la mira de ZigBee ... 57
Ilustración 41 Acceso al medio CSMA/CA ... 59
Ilustración 42 Modulos XBee ... 60
Ilustración 43 Conexiones mínimas requeridas para el Xbee. ... 60
Ilustración 44 Diagrama de pines del módulo Xbee. Vista Superior. ... 61
Ilustración 45 Trama de datos serie ... 62
Ilustración 46 Modos de operación del modulo Xbee ... 63
Ilustración 47 Proceso de transmisión del modulo Xbee ... 64
Ilustración 48 Ejemplo direccionamiento 16 y 64 bit. ... 69
Ilustración 49 Canales disponibles para el protocolo IEEE 802.15.4 ... 70
Ilustración 50 Configuración punto-a-multipunto. ... 70
Ilustración 51 Red de Broadcast. ... 71
Ilustración 52 Ejemplo varias redes PAN NonBeacon con Coordinador ... 73
Ilustración 53 Estructura de la trama del modo API. ... 78
Ilustración 54 Armado del Prototipo ... 84
Ilustración 55 Motor ... 85
Ilustración 56 Diagrama del Contactor con motor trifasico ... 86
Ilustración 57 Diagrama del contactor con motor monofasico ... 86
Ilustración 58 Conexion de contactor en el prototipo ... 87
Ilustración 59 Sensor con la incidencia del Laser ... 87
Ilustración 60 Diagrama electrico del sensor ... 88
Ilustración 61 Electroiman ... 88
Ilustración 62 Botones para la estacion manual ... 89
Ilustración 63 Control de usuario ... 90
Ilustración 64 Conexion del PIC en la puerta ... 91
8
ÍNDICE DE TABLAS
Tabla 1 Comparativa de diferentes tecnologías inalámbricas ... 57
Tabla 2 Pinout del modulo ZigBee ... 61
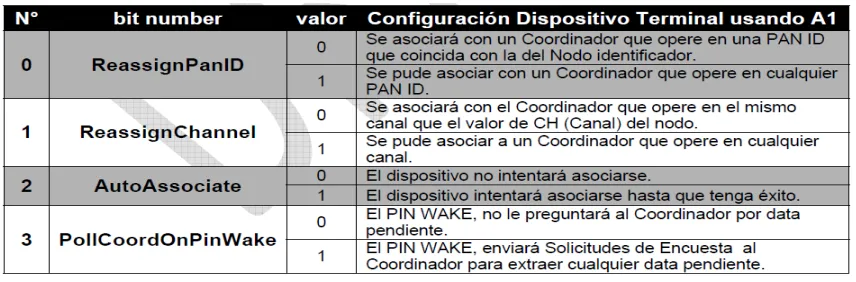
Tabla 3 Configuración Dispositivo Terminal. Comando A1. ... 74
Tabla 4 Configuración Coordinador. Comando A2. ... 74
Tabla 5 Comandos especiales. ... 75
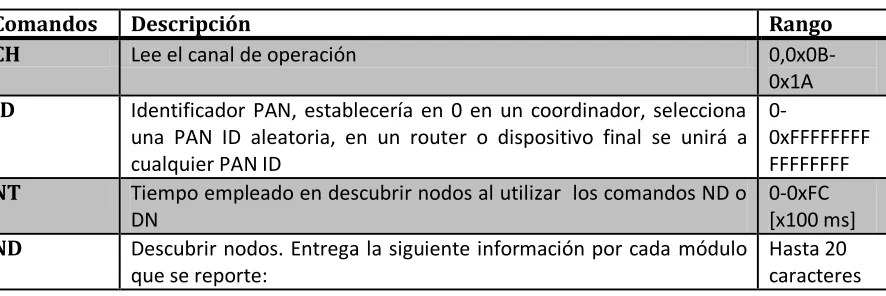
Tabla 6 Comandos de direccionamiento. ... 75
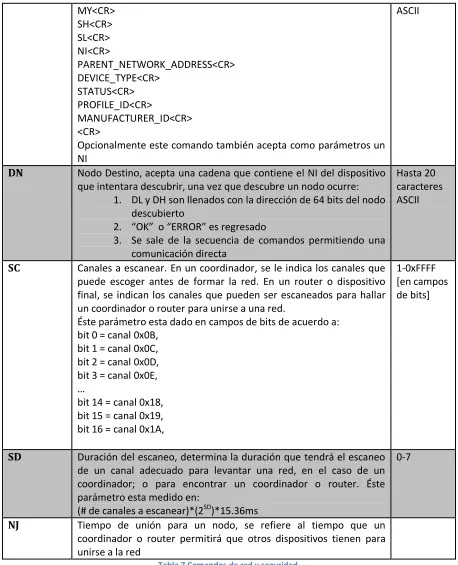
Tabla 7 Comandos de red y seguridad. ... 76
Tabla 8 Comandos de interfaz serial ... 77
Tabla 9 comandos de diagnostico ... 77
Tabla 10 Comandos AT... 77
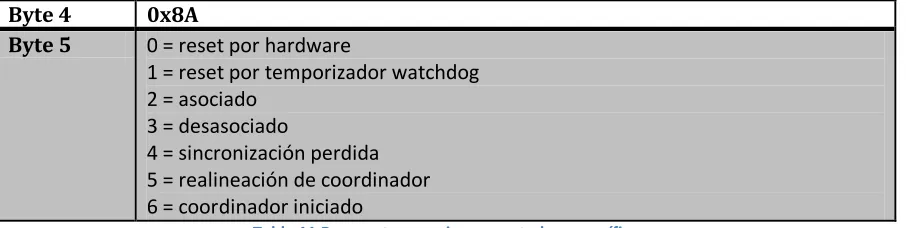
Tabla 11 Respuestas a acciones o estados específicos ... 79
Tabla 12 Comandos AT... 80
Tabla 13 Valores de parámetros cola ... 80
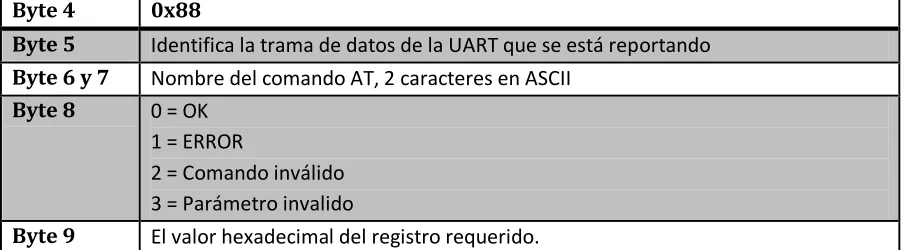
Tabla 14 Respuesta a comandos AT ... 80
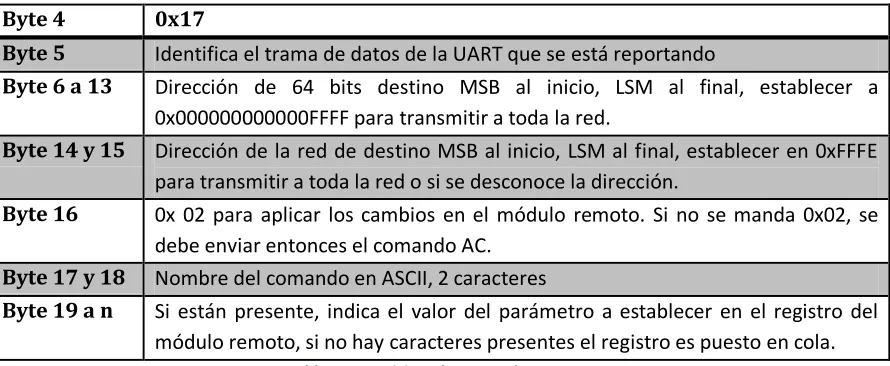
Tabla 15 Requisitos de comandos remotos ... 81
Tabla 16 Requisito a comando remoto ... 81
Tabla 17 Requisitos de transmisión ... 82
Tabla 18 Estado de transmisión ... 82
9
I. RESUMEN
Los sistemas de control de acceso vehicular en nuestros días, juegan un papel de
comodidad para el usuario final; ya que en las construcciones recientes es
indispensable contar con estacionamiento. Ya sea para una casa, para un edificio
de departamentos, de oficinas o bien para bodegas.
Es por ello que los usuarios cuentan con sistemas de control para abrir y cerrar la
puerta de acceso haciendo esto más fácil, sencillo y cómodo; pero estos sistemas
carecen de ciertas características para hacer todavía más autónomo el manejo de
las mismas puertas.
Basado en esto, el presente trabajo describe de manera detallada el proceso de
planeación, diseño e implementación de un sistema de control de acceso vehicular
basado en un algoritmo de programación que permite al usuario obtener esa
carencia de los demás sistemas de control para el manejo autónomo de las
puertas de acceso
10
Capí tulo
INTRODUCCIO N
1.1 Introducción
Se desarrolló un prototipo de control inalámbrico para la apertura y cierre de puertas de acceso vehicular, los comandos enviados vía inalámbrica, son datos encriptados, por seguridad y no sean fácilmente decodificados, por extraños. En el proceso de apertura y cierre de la puerta, se activara y desactivara un cerrojo por medio de un electroimán, se instalaron diferentes sensores. Para la detección de cerrojo abierto o cerrado, sensores para detección de objeto o personas, para detener su funcionamiento, y emitirá una alarma en dado caso, una vez abierta o cerrada la puerta, mandara un aviso vía inalámbrica para informar si se cerró correctamente o hubo un mal funcionamiento.
1.2 Objetivo
11
1.3 Justificación
En el cierre automático de puertas vehiculares, son de control de lazo abierto, el usuario no tiene una retroalimentación de si la puerta cerro correctamente, ya sea por obstrucción o por falla de funcionamiento, además de que el código puede ser robado vía inalámbrica y algún extraño podría tener acceso, por esta razón, los comandos son encriptados por seguridad
1.4 Alcance del Trabajo
El desarrollo del sistema de control inalámbrico de apertura y cierre de una puerta de acceso vehicular se limita hasta su completo diseño y pruebas de factibilidad, lo que no abarca su implementación en una puerta real, sin embargo se dejan las bases para que dicha implementación se pueda llevar acabo en un futuro.
En cuanto a la muestra tratada se consideró una representación de una maqueta con forma de una puerta real; pensando en todas las características necesarias para poder así tener una simulación correcta de la misma.
12
Capí tulo
SENSORES
2.1 Introducción
En este capítulo se mostrara al lector lo que es un sensor, cuál es su función en un sistema de control, y como dependiendo de las diferentes necesidades que tenga un sistema se eligen diferentes sensores los cuales ayudan a realizar las diferentes tareas implicadas en un proceso. Debido a esto se anexan las diferentes razones por las cuales se eligieron los tipos de sensores de los que se hablara más adelante.
2.1.1 Definición de un Sensor
Un sensor es un dispositivo que cambia un tipo de energía en energía eléctrica
Al elemento activo de un sensor se le conoce como transductor.
Al parámetro físico a detectar comúnmente se le conoce como variable, existen muchos tipos de variables a medir por ejemplo; temperatura, humedad, distancia, flujo, nivel, presión, pH, estas solo son algunas variables que son muy comunes sin embargo hay muchas más.
13
2.2 Sensores de proximidad
Un sensor de proximidad consiste de un elemento que cambia su estado o una señal analógica cuando se acerca un objeto, pero que generalmente no lo toca en realidad.
Estos sensores son muy comunes debido a que su funcionamiento es muy simple, ya que trabajan con el principio de reflexión, debido a esto son muy utilizados en sistemas de alarmas contra intrusos o en muchos de los casos en la industria para detectar si objetos, personas o incluso animales se encuentran en sitios peligrosos donde exista la posibilidad de que ocurra un accidente, ya sea que algún humano salga accidentado o que algún objeto que este obstruyendo algún proceso termine por dañar el sistema lo que ocasionaría perdidas muy grandes.
2.2.1Sensores ultrasónicos
La función general de los sensores ultrasónicos es la detección de objetos por medio de la transmisión y recepción de una onda la cual no es audible para el oído humano, ya que estas ondas son transmitidas a frecuencias menores a 20KHz de ahí su nombre.
Su funcionamiento consiste en emitir la onda acústica la cual será interrumpida si existe un objeto el cual obstruya el camino de la onda, en consecuencia la onda acústica se reflejara en el objeto y será recibida por el receptor, el sensor indicará que existe un objeto.
14
2.2.2 El sensor SRF 02
Este sensor es un sensor de proximidad por ultrasonido, es un sensor realmente pequeño y con un consumo mínimo de energía, este sensor tiene una interfaz I2C. La interfaz serie usa un formato de 9600 bauds, un bit de comienzo ocho bits de datos y uno de parada. Se puede conectar a cualquier microcontrolador porque el voltaje que usa es el de un circuito TTL ósea 5 Volts y su consumo es de 4mA. Ya sea usado con un puerto RS232 o en modo I2C el rango de medición es de 15cm a 600cm, las mediciones nos la puede dar en centímetros, pulgadas o microsegundos.
Ilustración 2 Características Sensor SRF02
15
conveniente ya que evitamos que los dispositivos se calienten. Otra gran ventaja de este sensor es que puede detectar una infinidad de objetos sin importar cuál sea el material con el que están hechos, eso nos ayuda de sobremanera ya que nos facilita la tarea de detección.
2.2.3 Sensores de fin de carrera
Existen diversas modalidades de interruptores que se activan por la presencia de un objeto, y sirven como sensor de proximidad, cuya salida corresponde al estado de encendido o apagado.
Un microinterruptor es un pequeño interruptor eléctrico que requiere de contacto físico y una pequeña fuerza de acción para activar el cierre de los contactos. Funcionan como lo que comúnmente es llamado swiitch ya que solo tienen dos estados que son circuito normalmente abierto y circuito normalmente cerrado.
Estos microinterruptores son llamados también sensores de fin de carrera o de contacto, y son comúnmente usados para tener un indicador que avise que un proceso ha terminado o no.
16
El motivo por el que se eligió este tipo de sensor para nuestro prototipo es porque se necesitara saber si la puerta cerro correctamente, y esto es por seguridad para el usuario, y para hacer más confiable al prototipo ya que los sistemas que existen para realizar el cierre y la apertura de una puerta de forma automatizada no cuentan con esta seguridad necesaria.
2.3 Sensores ópticos
Los sensores ópticos son llamados también sensores fotoeléctricos y su objetivo principal es la detección de objetos independientemente del material con el que estén hechos.
Ilustración 5 Sensor Óptico
Existen dentro de los sensores ópticos varios tipos, que son; réflex, de barrera y autoreflex, se utilizó el de tipo barrera, el cual consiste en un emisor y un receptor, por eso se propone un láser como emisor y de receptor una fotorresistencia la cual por ser muy sensible a la luz propia del día se cubre con un material llamado termofit que es un
17
aislante de conductores, pero resulto una buena solución ya que solo se deja descubierto un punto de la fotorresistencia que es donde incidirá la luz del láser.
Dependiendo del proceso que se vaya a realizar se escogen los sensores, anteriormente se escribió acerca de un sensor ultrasónico y se mencionó que era el ideal para el prototipo, sin embargo durante el desarrollo del mismo, se tuvieron muchos problemas de ruido, lo cual se sabe es producido por muchos factores, el sensor ultrasónico casi siempre daba medidas erróneas es por eso que se decidió utilizar otro tipo de sensor, que fue un sensor óptico, el cual resulto también ideal y es con el que actualmente está funcionando el prototipo.
18
CAPI TULO
MOTORES DE INDUCCIO N
3.1 Introducción
En este capítulo se hablara del motor de inducción, se explicara porque se llama así, cuál es su funcionamiento, como se puede arrancar un motor de inducción y cuál es la razón de hacerlo así, además se incluye un tipo muy común de motores de inducción que es el motor monofásico de corriente alterna, se anexara también como aumentar el par por medio del sistema de engranes, estos, además de explicar la forma en que un motor que gira solo en un solo sentido puede girar en dos sentidos totalmente opuestos (motores reversibles).
3.1.1 El motor de inducción
El motor de inducción recibe este nombre porque, opera bajo el principio de inducción electromagnética. Debido a que este tipo de motores no llega a trabajar nunca a velocidad síncrona, también se le conoce como motor asíncrono.
19
3.1.2 Motores monofásicos de corriente alterna
Cuando este tipo de motores de inducción están en operación, desarrollan un campo magnético rotatorio, pero antes de que el rotor inicie la rotación, el estator produce solo un campo estacionario constante.
Para producir un campo rotatorio y, por lo tanto, un par de arranque, se debe tener un devanado auxiliar desfasado 90° con respecto al devanado principal. Una vez que el motor ha arrancado, el devanado auxiliar se desconecta remueve del circuito.
Para el prototipo se decidió utilizar un motor monofásico ya que por lo regular la mayoría de la gente cuenta con instalaciones eléctricas monofásicas dentro de sus hogares, esto hace al prototipo casi “universal”. Se eligió de corriente alterna por ser más económico y porque su arranque es más simple, además de que podemos encontrar en un gran rango de potencias.
3.1.3 Arranque del motor
Una de las partes más importantes de un motor eléctrico es el mecanismo de arranque.
Para los motores monofásicos se utiliza un tipo especial de arranque que consiste en un conmutador centrifugo para desconectar el devanado de arranque, cuando el motor ha alcanzado de 75% a 80% de su velocidad máxima de operación; de tal manera que a velocidad nominal, el motor funciona solo con un devanado de operación.
A esta velocidad un mecanismo a base de resorte abre, ya que la fuerza centrífuga del rotor vence la del resorte que hace que el conmutador permanezca cerrado.
20
corto, esto hace que el primario demande mucha corriente, y si esta condición permanece por mucho tiempo, entonces el devanado sufre un calentamiento excesivo.
3.1.4 Arranque de motor con capacitor permanente
Los devanados del motor son idénticos ya que cuentan con el mismo diámetro y numero de vueltas, solo que en un devanado se conecta un capacitor en serie, lo ideal sería poner un valor de un capacitor el cual produzca un efecto donde las corrientes de los devanados sean lo más perecidas posibles y el desfasamiento entre los devanados sea aproximadamente de 90°. Con estas condiciones la rotación es caso perfecta y el motor trabaja a plena carga con un par muy estable.
Como el capacitor trabaja en forma constante, es decir el capacitor nunca es desconectado no se necesita tener un interruptor centrifugo que cierre el circuito.
3.2 Inversión del sentido de rotación de
motores
Los motores están diseñados para girar en el sentido de las manecillas del reloj o en sentido contrario a las manecillas del reloj.
Sin embargo a partir de esto se pueden diseñar motores para que giren en ambos sentidos. Existen muchas formas de Invertir el sentido de giro de un motor pero generalmente es una operación que está acompañada por un intercambio en las terminales del motor. Otra forma de hacerlo es conectar las terminales del motor a un
21
arrancador magnético con inversión esto siempre y cuando el motor este diseñado para girar en ambos sentidos.
3.2.1 Inversión del sentido de rotación de los motores
monofásicos
Un motor monofásico requiere de un devanado de arranque para arrancar. El devanado de arranque da el par de arranque y determina la rotación del motor. En el motor monofásico el sentido de rotación se invierte intercambiando las terminales del devanado de arranque. Esto se puede hacer con el arranque por capacitor antes mencionado.
Generalmente estos motores con inversión de giro son usados para tareas donde se requiera el avance y retroceso de un motor, en el caso de nuestro prototipo que hace la apertura y cierre de una puerta, es importante tener un motor reversible (que gire hacia la izquierda y hacia la derecha), ya que sin él solo se realizaría la mitad de la tarea que sería abrir o cerrar.
3.3 Control de velocidad de los motores
monofásicos
22
3.3.1
Acoplamientos mecánicos
Los acoplamientos mecánicos en este caso trenes de engranes son muy utilizados para transferir y transformar el movimiento de tipo rotacional. Se emplean para cuando se necesita obtener un cambio de velocidad.
El movimiento rotacional se transfiere de un eje a otro mediante un par de cilindros giratorios, sin embargo es común que existan deslizamientos o derrapes, es por eso que, se añaden dientes de engrane, con lo que obtiene un par de engranes dentados.
Los engranes transmiten el movimiento rotacional entre ejes paralelos, estos engranes tienen dientes rectos, les decir, los ejes cortan en líneas axiales paralelas al eje y, son llamados engranes rectos.
En la figura podemos observar que uno de los engranes es más pequeño que el otro este es llamado piñón. Como se ya se había mencionado estos trenes de engranes son muy usados para el control de velocidad donde la relación entre las velocidades de los engranes (velocidades angulares) es la siguiente:
Ilustración 10 Relación de engranaje
23
Como se mencionó anteriormente que dependiendo de la necesidad que se tenga se selecciona la velocidad del motor que se desee entonces, para el prototipo se trabajó con una velocidad muy pequeña ya que de hecho para la tarea que se asignó al motor no importaba tanto la velocidad, aunque se tuvo en cuenta que tuviera la velocidad necesaria para abrir y cerrar la puerta de manera eficiente.
3.3.2 Motorreductores
Los motorreductores son llamados así porque cuentan con un sistema de engranes que como se explicó antes controlan la velocidad de los motores, los trenes de engranes son conectados en la flecha del motor para controlar el número de vueltas que se desea tener a la salida.
En teoría los motorreductores trabajan con la relación del número de vueltas que hay en la salida haciendo referencia la numero de vueltas que el tren de engranes produce a su salida, y el número de vueltas con las que se contaba antes de tener el tren de engranes.
La consecuencia de la reducción del número de vueltas a la salida del tren de engranes con respecto a la entrada es el control de velocidad del motor.
3.4 Transmisión de movimiento de motores
Los motores sean del tipo que sea, siempre generan un giro ya sea en sentido de las manecillas del reloj o en sentido inverso, generalmente ese movimiento es necesario para
24
el m0oviento de otros objetos, pero esto sería imposible si solo se contara con la flecha del motor, ya que existen diferentes formas de objetos y también existen diferentes necesidades de movimiento, por ejemplo es común que se necesiten movimientos angulares muy específicos, es por esto que a lo largo de la historia de la industria se han creado diferentes diseños de piezas que sirven precisamente para transmitir el
movimiento de los motores, en diferentes tipos de movimiento, como el movimiento lineal y el angular por ejemplo, a continuación se muestran las diferentes piezas que se
utilizaron para la transmisión de movimiento del motor.
3.4.1 Catarinas
Las catarinas pueden considerarse como un tipo de engrane de dientes rectos sin embargo las catarinas pueden adaptase a las fechas de los motores para posteriormente ser conectadas a una cadena la cual transformara el movimiento de rotacional de la flecha en un movimiento lineal. Por lo que las catarinas forman parte de las transmisiones por cadenas. El tipo de catarina debe adaptarse a la cadena utilizada en la transmisión por cadena
25
3.4.2 Cadenas
Las cadenas son sistemas que sirven para transmitir movimiento, por lo regular se usan en sistemas que cuentan con engranes para evitar deslizamientos se traban en los engranes rectos.
El resultado de conectar un engrane dentado a una cadena nos arroja un movimiento lineal, o transferir movimiento de un engrane a otro, un ejemplo claro para ilustrar esto es la cadena de una bicicleta donde la cadena sirve para transferir el movimiento de una estrella (un tipo especial de engrane) a otra y así dar movimiento a las llantas.
Ilustración 13 Cadenas industriales
Con la adaptación de la Catarina y cadena, se logró obtener un movimiento lineal ósea en el eje de las x, esto es importante porque es el movimiento que la puerta necesita para funcionar.
26
3.5 Protecciones para motores
3.5.1 Contactores
Un contactor es un dispositivo electromecánico, de tipo on/off, que cuando circula corriente por sus bobinas cierra un circuito provocando el cierre de sus contactos.
3.5.2 Contactores magnéticos
Los contactores magnéticos son interruptores accionados mediante electromagnetismo, que proporcionan un medio seguro y conveniente para conectar e interrumpir circuitos derivados.
3.5.3 Contactores reversibles
Los contactores reversibles cuentan con dos bobinas que funcionan con corriente alterna, y tienen integrado a su vez dos contactos, donde solo se activara uno de los dos contactos, se debe energizar el lado donde se requiera una acción, esto dependerá de la acción que se desee realizar, una vez energizado uno de los lados el otro lado quedara bloqueado y no podrá ser activado, hasta que el otro contacto este en circuito abierto.
Se usan para controlar el giro de un motor reversible, impidiendo así que pudiera haber algún accidente si se accionaran los dos sentidos de giro.
27
El prototipo usara este tipo de contactores porque necesita mover una puerta de cochera, la cual necesita moverse a la derecha para cerrar y a la izquierda para abrir, otra razón importante es porque el prototipo asegura una larga duración del sistema, y el hecho de que este contactor impida que por algún descuido pudieran activarse los dos sentidos de giro del motor es una gran ventaja ya que se asegura el buen funcionamiento del prototipo.
En las figuras siguientes se muestran las conexiones del contactor, una parte de la bobina del contactor es conectada al circuito de potencia, el cual se expondrá en la sección 3.5.5
Ilustración 17 diagrama de conexión de los contactores
28
3.5.4 Interruptores termomagnéticos
El interruptor termomagnético, es un dispositivo utilizado para la protección de los circuitos eléctricos contra cortocircuitos y sobrecargas.
El funcionamiento de estos interruptores termomagneticos está basado en los efectos producidos por la corriente, que son el efecto magnético y el efecto térmico (efecto joule).
El dispositivo entonces consta de dos partes, la primera es un electroimán y una lámina bimetálica, conectada en serie y por estas circula la corriente hacia la carga.
Cuando circula corriente en la parte magnética el electroimán crea una fuerza que, que es capaz de abrir un contacto por medio de un mecanismo, pero se debe tener en cuenta que el mecanismo solo se abrirá si la intensidad de la corriente que está circulando por la carga sobrepasa el límite de corriente fijado. El tiempo de respuesta de un interruptor termomagnético es de 25milisegundos y, esto hace al interruptor un dispositivo seguro por su rápida respuesta. Esta parte que es la magnética está destinada a proteger por cortocircuito.
La otra parte que es la térmica está constituida por una lámina bimetálica que, al sobrecalentarse de un determinado límite por efecto de la corriente que circula por ella,
29
sufre una deformación y pasa a una posición que activa el correspondiente dispositivo mecánico, provoca la apertura del contacto. Esta parte es la encargada de proteger de corrientes que, aunque son superiores a las permitidas por la instalación, no llegan al nivel de intervención del dispositivo magnético. Esta situación es típica de una sobrecarga, donde el consumo va aumentando conforme se eleva la corriente por conexión de aparatos o mal funcionamiento de los mismos.
Además de la gran ventaja de desconexión automática, el interruptor cuenta con una palanca la cual permite la desconexión manual de la corriente, sin embargo a pesar de que podamos manipularlo manualmente, si existe un corto circuito o una sobrecarga, el interruptor volverá a hacer la desconexión automática sin importar que se intente reconectar.
Ilustración 19 Interruptores electromagnéticos
30
3.5.5 Optoaisladores y triacs
Un triac o tríodo para corriente alterna es un dispositivo semiconductor de la familia de los transistores. El triac se caracteriza por tener la propiedad de ser bidireccional. De manera más simple podría decirse que el triac es un interruptor capaz de conmutar la corriente alterna.
Su estructura interna se asemeja en cierto modo a la disposición que formarían dos SCR en anti paralelo. Posee tres electrodos: MT1, MT2 y compuerta. El disparo del TRIAC se realiza aplicando una corriente al electrodo compuerta debido a la baja corriente de activación en su compuerta resulta muy útil en este tipo de aplicaciones, pero es vital también mantener una cierta seguridad al momento de activar con un microcontrolador el encendido o apagado por eso también se puede utilizar un elemento que se conoce como opto acoplador.
Los opto-acopladores u opto-aisladores son dispositivos integrados que combinan en un mismo encapsulado un fotodiodo (emisor) con un dispositivo de control sensible a la luz (fototransistor, fototriac.). El objetivo con esto es aislar físicamente la entrada de la salida, ya que no existe conexión eléctrica entre ellas.
Estos dispositivos son de especial interés en las aplicaciones que requieren voltajes, corrientes o potencias diferentes entre la lógica digital y los elementos a controlar.
Las principales aplicaciones de un optoaislador son:
-acoplar cargas resistivas
-acoplar cargas inductivas con triacs de compuerta sensitiva
31
Es importante hacer notar que el motor que se encarga del movimiento de la puerta, consume cierta potencia ya que es un motor de corriente alterna no se puede conectar directamente al microcontrolador o a algún sistema que consuma una potencia menor, es por eso que se debe implementar un sistema que se encargue de acoplar dos sistemas con potencias diferentes.
También se debe tomar en cuenta que algunos microcontroladores son muy sensibles al ruido lo que afecta la respuesta del sistema, también protege de cortocircuito ya que como se mencionó la salida está aislada de la entrada.
En general es fácil obtener un circuito como el antes mencionado ya que solo se necesita un software capaz de convertir circuitos esquemáticos a circuitos impresos este software es llamado livewire, este paquete permite desarrollar los esquemáticos del circuito que en combinación con otro paquete llamado PCB wizard que es el que convierte los circuitos esquemáticos a circuitos PCB, nos crea las pistas que en general servirán para realizar las placas que contendrán el circuito protector de estado sólido que se muestra en la siguiente ilustración.
Como se explicó anteriormente
El diagrama mostrado en la ilustración anterior. Nos muestra los diferentes elementos que el circuito utiliza, sin el software LIVEWIRE Y PCB WIZARD tiene algunas
32
desventajas y una de las principales es que cuenta con una galería muy limitada de componentes electrónicos, es por eso que en el diagrama ¿??? Hay un transistor etiquetado como un triac llamado TIC 226, lo que se tuvo que hacer es tomar de la galería un transistor que tuviera los mismos pines del triac que el circuito de protección debe llevar, al momento de armar y soldar se necesitó hacer coincidir los pines del triac con los obtenidos en el PCB. El circuito de protección funciona correctamente por lo que sabemos que es posible hacer la sustitución de elementos en LIVEWIRE, siempre y cuando se tenga el conocimiento para hacer la conexión correcta de pines en el PCB obtenido
.
Ilustración 22 Diagrama de sistema de protección
33
3.5.6 El electroimán como cerradura
Se sabe que el electroimán es un dispositivo que trabaja a base de inducción magnética, por lo que resulto conveniente para la aplicación de una cerradura.
El objetivo de la cerradura es terminar el proceso de cerrado de puerta, una vez que el sensor de fin de carrera de cerrado cambie de estado, la cerradura (electroimán) será activado, provocando así que la puerta quede bien cerrada.
Esto se utiliza como un sistema de seguridad extra para el sistema.
Ilustración 24 Electroimán
Para poder hacer funcionar al electroimán fue necesario crear un circuito que acoplara las diferencias de voltaje del microcontrolador y del electroimán, ya que el electroimán funciona con doce volts de cd.
El circuito construido se muestra a continuación
:
34
Como vemos el circuito está formado por un amplificador de voltaje construido con un operacional, y un Darlington, provocando así poder activar el electroimán el cual tiene una potencia mayor que el microcontrolador.
3.6 Estación manual
A pesar de que se construyó un prototipo semiautomatizado se debe tener en cuenta que cualquier sistema existen momentos críticos, donde existe riesgo de perder equipo importante persona, momentos en los cuales se deben tomar decisiones rápidas, es por eso que se decidió no hacer caso omiso de proveer al prototipo una estación manual, la cual funge como un sistema que se usara ante una falla que tenga el sistema, o simplemente por gusto del usuario.
Ilustración 26 Diagrama de conexión de la estación manual
3.6.1 Botones de arranque y paro
35
(manual), se utilizó un interruptor más común porque en la realización de la estación manual, la investigación acerca de botoneras arrojo que los precios de las botoneras son muy elevados, entonces se implementó un tercer botón con un interruptor deslizable, se implementó un cuarto botón para controlar el sentido de giro del motor, se utilizó también un interruptor deslizable.
36
Capí tulo
MICROCONTROLADOR
4.1 Introducción
A lo largo de este capítulo se expondrán superficialmente las características del microcontrolador que se eligió, también hablaremos de la lógica de programación que se utilizó para poder realizar el proceso del prototipo.
4.2 Microcontrolador PIC
Los microcontroladores PIC son de tipo RISC fabricados por la compañía microchip. Actualmente los PICS vienen con varios periféricos incluidos (módulos de comunicación serial, USART) y con una memoria de programa que tiene un rango de 512 hasta 32000 palabras.
Todos los PICS están basados en la arquitectura Harvard, con memoria de programa y datos separadas. Los microcontroladores PIC cuentan con una gama muy amplia de dispositivos de entrada y salida, disponen de puertos paralelos de ocho bits, temporizadores, puertos serie síncronos y asíncronos, convertidores A/D, módulos PWM
37
En el mercado hay muchísimas marcas de componentes electrónicos, y seleccionar una es un tanto complicado, aunque particularizando el microcontrolador es un dispositivo el cual tiene generalmente los mismos componentes internos y externos independientemente de la marca, aunque es importante señalar que algunas marcas son mejores que otras.
En realidad cualquier microcontrolador que cuente con un módulo de comunicación USART puede ser utilizado en el prototipo para transmitir y recibir datos, sin embargo debido a la experiencia que se tiene en el manejo de microcontroladores PIC, el PIC de la familia 18F45xx fue ideal para la automatización del proyecto.
Los microcontroladores PIC son muy famosos por ser muy sensibles a ruidos conocidos como OFFSET, por las pruebas hechas los PICS funcionan mejor si están montadas en placas de cobre, por lo que se utilizó una placa que permite programar al PIC directamente hacer conexiones en los registros y puertos sin necesidad de estar desconectando el PIC, en la figura se muestra la placa antes mencionada y el PIC ya conectado.
Ilustración 29 Conexión Xbee- PIC 18F4550
4.3 Lógica de programación
38
capacidad multivariable que tiene un microcontrolador, porque además de enviar y recibir datos, siempre está a la espera de los mismos, los mensajes de confirmación que envía el microcontrolador son importantes para el usuario, por lo que el usuario necesita visualizar los mismos. Debido a esto se propone el uso de LEDs de diferentes colores para los diferentes mensajes de confirmación que el microcontrolador envié al usuario.
En el momento en que el diseñador comienza a pensar en cómo será el proyecto, también debe pensar en cómo va a funcionar y si se está utilizando un microcontrolador es importante el software que se desarrollara para dicho proyecto, por esta razón en las siguientes páginas se muestra la lógica de programación que llevara incorporada el microcontrolador. En general el software sirve para hacer la comunicación entre microcontrolares, el del sistema de la puerta y el del control de usuario, además de enviar mensajes de confirmación del cierre de puerta y mensajes de alarma si es que la puerta no cerró correctamente.
PROGRAMA PRINCIPAL
En esta parte del programa el microcontrolador se encuentra en espera de la instrucción que va a ejecutar, dependiendo de la instrucción a ejecutar ya sea abrir o cerrar se va a una rutinas de interrupción de cada una de dichas instrucciones.
SI ISR ABRIR INICIO MODO ESPERA ¿ABRIR PUERTA? ¿CERRAR PUERTA? ISR CERRA R SI NO NO
39
En las hojas posteriores se muestran y explican las rutinas de interrupción para cerrar y abrir respectivamente.
RUTINA DE INTERRUPCION CERRAR
NO
SI
NO
SI ISR CERRAR
PROCESAR DATO
ACTIVAR SENSORES
¿HAY
OBSTRUCCION? ENVIAR DATO PEDIR DATO NUEVAMENTE
ACTIVAR MOTOR
¿CERRO CORRECTAMENTE?
DETENER MOTOR
CERRAR CERROJO
ENVIA‘ CONFI‘MACION DE BIEN CE‘‘ADO
RET ¿CERRO
CORRECTAMENTE? ENVIAR AVISO PEDIR DATO NUEVAMENTE SI
NO
40
En esta rutina es importante procesar el dato recibido, para así poder activar el sensor que revisara si existe algún objeto que obstruya el libre cerrado de la puerta, se manda un aviso al usuario, y se vuelve a pedir el dato para volver hacer este proceso el cual se hora hasta que no haya objetos que obstruyan y la puerta pueda cerrar libremente, una vez que no haya objetos o si nunca los hubo, se activa el motor y estará funcionando hasta que un switch de fin de carrera cambie de estado indicando con esto que la puerta cerro correctamente, una vez activado este sensor de fin de carrera se cierra un cerrojo, cuando el cerrojo cambia de estado avisando por medio de otro sensor de fin de carrera, se envía al usuario un aviso, entendiéndose este como; fin del proceso de cerrado, la puerta cerro correctamente.
RUTINA DE INTERRUPCION ABRIR
SI
Ilustración 32 Diagrama de Flujo Rutina Abrir
SI ISR ABRIR PROCESAR DATO ACTIVAR SENSORES ¿HAY
OBSTRUCCION? ENVIAR DATO PEDIR DATO NUEVAMENTE ABRIR CERROJO ACTIVAR MOTOR ¿ABRIO CORRECTAMENTE DETENER MOTOR
ENVIA‘ CONFI‘MACION DE BIEN ABIE‘TO
RET NO
NO
41
La rutina de apertura es muy similar a la rutina de cerrado y esto es porque se hace exactamente lo mismo, pero se debe tomar en cuenta que el motor gira en sentido opuesto al giro que hace cuando la puerta es abierta. Aquí no son tan importantes los mensajes de confirmación ya que el usuario está a pocos metros de la puerta y puede darse cuenta fácilmente si la puerta abrió correctamente o no, por otro lado los mensajes de alarma son importantes, ya que indica si existe algún objeto que obstruya la apertura de la puerta y es por eso que el software cuenta con la programación necesaria para enviar dichos mensajes al usuario.
Ilustración 33 Diagrama para el control del sistema
4.4 Encriptación de datos
Encriptar es transformar un conjunto de datos a su equivalente dentro de un sistema de caracteres diferentes a través de un algoritmo de encripción o función de transformación.
42
Principalmente se pueden mitigar dos tipos de amenazas por medio de la encripción las amenazas contra la confidencialidad y contra la autenticidad; además las técnicas de defensa como control de acceso adicionalmente se benefician con la encripción.
EL algoritmo o secuencia de procesos debe obligatoriamente cumplir dos condiciones:
1. Que sea posible utilizar una clave como elemento de cálculo del algoritmo.
2. Que exista en lo posible una relación biunívoca entre cada elemento del conjunto de símbolos de la base y cada elemento del conjunto transformado.
La calidad del algoritmo de encripción se mide por las siguientes variables:
Su complejidad. Entre más complejo es más difícil de adivinar, la complejidad se determina por variables como el tamaño, diversidad y amplitud de recursos matemáticos de la fórmula, la cantidad de iteraciones recurrentes, el uso de dos o más claves por iteración y la profundidad de la relación matemática entre cada iteración.
La longitud binaria o decimal de la clave. La probabilidad de adivinación de una clave es inversamente proporcional a su longitud.
La facilidad de implementación.
Existen dos tipos principales de encripción, la simétrica y la asimétrica.
La criptografía simétrica es un método de encripción, en el cual se usa una misma clave para cifrar y descifrar mensajes. Las dos partes que se comunican deben ponerse de acuerdo sobre la clave que se va a emplear. Una vez que ambas partes tienen acceso a esta clave, el remitente cifra un mensaje usándola, lo envía al destinatario, y éste lo descifra con la misma. El principal problema con los sistemas de cifrado simétrico no está ligado a su seguridad, sino al intercambio de claves.
43
propietario debe guardarla de modo que nadie tenga acceso a ella. Los métodos criptográficos garantizan que esa pareja de claves sólo se puede generar una vez, de modo que se puede asumir que no es posible que dos personas hayan obtenido casualmente la misma pareja de claves.
Si el remitente usa la clave pública del destinatario para cifrar el mensaje, una vez cifrado, sólo la clave privada del destinatario podrá descifrar este mensaje, ya que es el único que la conoce. Por tanto se logra la confidencialidad del envío del mensaje.
4.4.1 Proceso de encriptación
El método de encriptación que se utilizó en el programa de envio de información del emisor que está en el control hacia el receptor que se localiza en la puerta, fue un enmascaramiento; debido a los tiempos de diseño e implementación del prototipo fue complicado obtener más tiempo para la codificación de un método de encriptación más complejo y seguro, por consecuencia se implementó un método sencillo pero demostrativo de que si se puede asegurar el dato; para seguridad del usuario.
4.4.2 Enmascaramiento.
El enmascaramiento consiste solo en aplicar una lógica de compuerta AND definiendo un dato como llave para la codificación, comparando esta llave con el dato entrante con la lógica AND, obtenemos un resultado; ese resultado es el que vamos a corroborar para verificar si el dato es el correcto o es otro dato que no está dentro de nuestra lógica de programación.
4.4.3 Diagrama de Flujo
44
Ilustración 34 Diagrama de flujo de Encripción del dato
si
¿El dato es correcto?
Comparamos con la llave
no Leemos dato
recibido
Encriptación
Procesamos dato
45
Capí tulo
ZIGBEE
5.1 Introducción
En este capítulo explicaremos de forma detallada que es el protocolo zigbee, cuales son los campos de aplicación, que diferencias existen entre otras tecnologías inalámbricas, las características que tiene y sus modos de configuración.
ZigBee, es una especificación de protocolos para sistemas de comunicación inalámbrica empleados en la radiodifusión digital de bajo consumo de energía; se basa en el estándar de la IEEE número 802.15.4 relacionado con la Redes Inalámbricas de Área Personal (Wireless Personal Area Network, WPAN).
La idea de ZigBee, surgió de la alianza de más de 100 empresas fabricantes de semiconductores entre las que se encontraban Invensys, Mitsubishi, Honeywell, Motorola, Phillips, Samsung, France Telecom, ABB e Intel; que buscaban la forma de crear una tecnología inalámbrica de bajo coste que debía cumplir con ciertas características como baja tasa de transferencia de datos, y una menor complejidad en comparación con otros estándares.
Entre las principales ventajas que presenta con respecto a otros sistemas están su bajo consumo de energía, la topología de red en forma de malla que emplea, así como su escalabilidad. Además, define el nivel físico y el control de acceso al medio de redes inalámbricas de área personal con tasas bajas de transmisión de datos. El sistema de comunicaciones que emplea es vía radio (con topología MESH).
ZigBee es muy similar a la tecnología de transmisión inalámbrica Bluetooth sin embargo, cuenta con características que lo diferencian de este, como son:
46
Menor consumo eléctrico que la tecnología Bluetooth. ZigBee tiene un consumo de 30 mA transmitiendo y de 3μA en reposo a diferencia de Bluetooth que gasta 40 mA transmitiendo y 0.2 mA en estado de reposo.
Ancho de banda de 250 Kbps.
Mientras que el Bluetooth se usa para aplicaciones como el Wireless USB, los teléfonos móviles y la informática casera, el ancho de banda del ZigBee se hace insuficiente para estas tareas, desviándolo a usos tales como los controles remotos, los productos dependientes de baterías, los sensores médicos, y dispositivos electrónicos en los cuales la transferencia de datos es menor.
5.2 Tecnologías empleadas
La especificación de ZigBee 1.0 fue aprobada en diciembre del 2004 y se encuentra disponible desde entonces para miembros del grupo de desarrollo de ZigBee Alliance; sin embargo la versión más reciente de ZigBee se publicó en el 2006.
La importancia de ZigBee radica en que puede ser ejecutado en procesadores y microprocesadores de bajo costo permitiéndoles generar grandes volúmenes de producción; además trabaja de manera óptima con circuitos digitales.
Para certificar un proceso se requiere la validación de los elementos físicos del sistema, esta certificación representa una gran cantidad de ventajas, puesto que al fabricarse radios de una misma máscara de semiconductor todas ellas compartirán las mismas características de radiofrecuencia; la certificación de hardware previene además, que un dispositivo físico perjudique su nivel de consumo de energía y el de los otros dispositivos que junto con él se encuentran conectados en la red. En el estándar 802.15.4, las radios cumplen con las validaciones de la norma ISO 17025.
47
La topología más útil de ZigBee, es la conexión en malla, ya que brinda la seguridad de que en caso de falla de un nodo, se reestructure la red para permitir la comunicación entre los nodos que siguen funcionando correctamente. La gestión de las conexiones entre nodos es tarea del coordinador de la red.
Las redes ZigBee están diseñadas para conservar la potencia en los nodos esclavos, logrando así un bajo consumo de energía. Gran parte del tiempo los dispositivos esclavo se encuentran en modo “dormido”, y solo despiertan durante una fracción de segundo para indicar a la red que siguen “vivos”. La transición del modo “dormido” a “despierto” también llamado modo de transmisión dura aproximadamente 15 ms.
ZigBee trabaja dos tipos de entornos: baliza y sin baliza. En el entorno baliza, se tiene un control amplio del consumo de potencia, pues cada dispositivo sabe cuándo debe transmitir; en este modelo existe un distribuidor que dirige las trasmisiones y controla los canales de envío. Los intervalos de las balizas varían de 15 milisegundos a 4 minutos. Este tipo de entorno es recomendable cuando el coordinador de red trabaja con una batería; aquí todos los dispositivos que conforman la red escuchan durante el balizamiento (envío de mensajes vía Broadcast durante un intervalo de 0.015 a 252 segundos). Para que un dispositivo pueda transmitir, debe ser dado de alta con el coordinador que le informará si hay mensajes para él o no; en caso de que no los haya, el dispositivo entra en estado de “dormido” y se despierta de acuerdo al horario establecido por el coordinador.
El entorno sin balizas se emplea en las redes de tipo punto a punto, en este tipo de ambiente cada dispositivo es autónomo, es decir puede iniciar una conversación cuando lo desee y esta conversación puede ser interrumpida por otro dispositivo. Una desventaja que presenta es que en ocasiones el dispositivo destino puede no recibir una petición debido a que el canal de transmisión está ocupado.
48
despiertan regularmente para avisar que siguen conectados en la red; en caso de que ocurra un evento que ponga en riesgo la seguridad, los dispositivos se despiertan instantáneamente enviando el mensaje pertinente al coordinador para que active la alarma correspondiente; en este tipo de ambientes, el coordinador se alimenta de la red principal todo el tiempo.
5.3 Características
Algunas de las características de ZigBee son:
ZigBee opera en las bandas libres ISM (Industrial, Scientific & Medical) de 2.4 GHz, 868 MHz (Europa) y 915 MHz (Estados Unidos).
Tiene una velocidad de transmisión de 250 Kbps y un rango de cobertura de 10 a 75 metros.
Capacidad de operar en redes de gran densidad, esta característica ayuda a aumentar la confiabilidad de la comunicación, ya que entre más nodos existan dentro de una red, entonces, mayor número de rutas alternas existirán para garantizar que un paquete llegue a su destino.
Cada red ZigBee tiene un identificador de red único, lo que permita que coexistan varias redes en un mismo canal de comunicación sin ningún problema.
Teóricamente pueden existir hasta 16 000 redes diferentes en un mismo canal y cada red puede estar constituida por hasta 65 000 nodos, obviamente estos límites se ven truncados por algunas restricciones físicas (memoria disponible, ancho de banda, etc.).
Es un protocolo de comunicación multi-salto, es decir, que se puede establecer comunicación entre dos nodos aun cuando estos se encuentren fuera del rango de transmisión, siempre y cuando existan otros nodos intermedios que los interconecten, de esta manera, se incrementa el área de cobertura de la red. Su topología de malla (MESH) permite a la red auto recuperarse de problemas en
49
5.4 Tipos de Dispositivos
Se definen tres tipos diferentes de dispositivos ZigBee según su papel en la red:
5.4.1. Coordinador ZigBee (ZigBee coordinador, ZC)
El tipo de dispositivo más completo. Puede actuar como director de una red en árbol así como servir de enlace a otras redes. Existe exactamente un coordinador por cada red, que es el nodo que la comienza en principio. Puede almacenar información sobre la red y actuar como su centro de confianza en la distribución de claves de cifrado.
5.4.2. Router ZigBee (ZR)
Además de ofrecer un nivel de aplicación para la ejecución de código de usuario, puede actuar como router interconectando dispositivos separados en la topología de la red.
5.4.3. Dispositivo final (ZigBee end device, ZED)
Posee la funcionalidad necesaria para comunicarse con su nodo padre (el coordinador o un router), pero no puede transmitir información destinada a otros dispositivos. De esta forma, este tipo de nodo puede estar dormido la mayor parte del tiempo, aumentando la vida media de sus baterías. Un ZED tiene requerimientos mínimos de memoria y es por tanto significativamente más barato.
En base a su funcionalidad puede plantearse una segunda clasificación:
5.4.4. Dispositivo de funcionalidad completa (FFD)
50
5.4.5. Dispositivo de funcionalidad reducida (RFD)
Tiene capacidad y funcionalidad limitadas (especificada en el estándar) con el objetivo de conseguir un bajo costo y una gran simplicidad. Básicamente, son los sensores/actuadores de la red.
5.5 Topología
En ZigBee existen tres tipos de topologías: estrella, árbol, y malla (mesh network). Siempre hay un nodo de red que asume el papel de coordinador central encargado de centralizar la adquisición y las rutas de comunicación entre dispositivos. Además, si se aplica el concepto de Mesh Network, pueden existir coordinadores o routers, alimentados permanentemente en espera de recibir/repetir las tramas de los dispositivos o sensores. Ambos dispositivos son del tipo FFD, debido a que exigen empotrar la mayoría de primitivas definidas por el stack ZigBee.
Los dispositivos que harán la función de sensores, termostatos o mandos a distancia serán de funcionalidad reducida (RFD), y serán alimentados por baterías o pilas.
5.5.1. Topología Tipo Estrella
En esta configuración, uno de los dispositivos tipo FFD asume el rol de coordinador de red y es responsable de inicializar y mantener los dispositivos en la red. Todos los demás dispositivos ZigBee, conocidos con el nombre de dispositivos finales, hablan directamente con el coordinador.
51
5.5.2. Topología Tipo Malla
En esta configuración, el coordinador ZigBee es responsable de inicializar la red y de elegir los parámetros de la red, pero la red puede ser ampliada a través del uso de routers ZigBee. El algoritmo de encaminamiento utiliza un protocolo de pregunta-respuesta (request-response) para eliminar las rutas que no sean óptimas, la red final puede tener hasta 254 nodos. Utilizando el direccionamiento local, se puede configurar una red de más de 65000 nodos (216).
Ilustración 35 Topología Malla
5.5.3. Topología Tipo Árbol
Es un caso especial de topología de conexión punto a punto, en la cual muchos dispositivos son FFDs y los RFD pueden conectarse como un nodo único al final de la red. Cualquiera de los FFDs restantes puede actuar como coordinadores y proveer servicios de sincronización hacia otros dispositivos o coordinadores.
Ilustración 36 Topología Árbol
5.6 Arquitectura
52
Ilustración 37 Capas Protocolo ZigBee
La capa de más bajo nivel es la capa física (PHY), que en conjunto con la capa de acceso al medio (MAC), brindan los servicios de transmisión de datos por el aire, punto a punto. Estas dos capas esta descritas en el estándar IEEE 802.15.4–2003.
El estándar trabaja sobre las bandas ISM de uso no regulado, dónde se definen hasta 16 canales en el rango de 2.4 GHz, cada una de ellas con un ancho de banda de 5 MHz. Se utilizan radios con un espectro de dispersión de secuencia directa, lográndose tasas de transmisión en el aire de hasta 250 Kbps en rangos que oscilan entre los 10 y 75 m, los cuales dependen bastante del entorno.
La capa de red (NWK) tiene como objetivo principal permitir el correcto uso del subnivel MAC y ofrecer una interfaz adecuada para su uso por parte de la capa de aplicación. En esta capa se brindan los métodos necesarios para: iniciar la red, unirse a la red, enrutar paquetes dirigidos a otros nodos en la red, proporcionar los medios para garantizar la entrega del paquete al destinatario final, filtrar paquetes recibidos, cifrarlos y autentificarlos. Se debe tener en cuenta que el algoritmo de enrutamiento que se usa es el
de enrutamiento de malla, el cual se basa en el protocolo Ad Hoc On-Demand Vector
Routing – AODV. Cuando esta capa se encuentra cumpliendo la función de unir o separar
53
La siguiente capa es la de soporte a la aplicación que es el responsable de mantener el rol que el nodo juega en la red, filtrar paquetes a nivel de aplicación, mantener la relación de grupos y dispositivos con los que la aplicación interactúa y simplificar el envío de datos a los diferentes nodos de la red. La capa de Red y de soporte a la aplicación son definidas por la ZigBee Alliance.
En el nivel conceptual más alto se encuentra la capa de aplicación que no es otra cosa que la aplicación misma y de la que se encargan los fabricantes. Es en esta capa donde se encuentran los ZDO (ZigBee Device Objects) que se encargan de definir el papel del dispositivo en la red, si el actuará como coordinador, ruteador o dispositivo final; la subcapa APS y los objetos de aplicación definidos por cada uno de los fabricantes.
Cada capa se comunica con sus capas subyacentes a través de una interfase de datos y otra de control, las capas superiores solicitan servicios a las capas inferiores, y éstas reportan sus resultados a las superiores. Además de las capas mencionadas, a la arquitectura se integran otro par de módulos: módulo de seguridad, que es quien provee los servicios para cifrar y autentificar los paquetes, y el módulo de administración del dispositivo ZigBee, que es quien se encarga de administrar los recursos de red del dispositivo local, además de proporcionar a la aplicación funciones de administración remota de red.
5.7 Empaquetamiento y Direccionamiento
En ZigBee, el empaquetamiento se realiza en cuatro tipos diferentes de paquetes básicos, los cuales son: datos, ACK, MAC y baliza.
5.7.1 Datos
54
5.7.2 ACK
También llamada paquete de reconocimiento, es dónde se realiza una realimentación desde el receptor al emisor, de esta manera se confirma que el paquete se ha recibido sin errores. Se puede incluir un tiempo de silencio entre tramas, para enviar un pequeño paquete después de la transmisión de cada paquete.
5.7.3 MAC
El paquete MAC, se utiliza para el control remoto y la configuración de dispositivos/nodos. Una red centralizada utiliza este tipo de paquetes para configurar la red a distancia.
5.7.4 Baliza
Se encarga de “despertar” los dispositivos que “escuchan” y luego vuelven a “dormirse” si no reciben nada más. Estos paquetes son importantes para mantener todos los
dispositivos y los nodos sincronizados, sin tener que gastar una gran cantidad de batería estando todo el tiempo encendidos.
55
5.8 Tipos de Tráfico de Datos
ZigBee/IEEE 802.15.4 dirige tres tipos de tráfico típicos:
1. Cuando el dato es periódico: La aplicación dicta la proporción, el sensor se activa, chequea los datos y luego desactiva.
2. Cuando el dato es intermitente: La aplicación, u otro estímulo, determina la proporción, como en el caso de los detectores de humo. El dispositivo necesita sólo conectarse a la red cuando la comunicación se hace necesaria. Este tipo habilita el ahorro óptimo en la energía.
3.
Cuando el dato es repetitivo: La proporción es a priori fija. Dependiendo de las hendeduras de tiempo repartidas, los dispositivos operan para las duraciones fijas.5.9 Técnicas de Modulación
ZigBee opera en dos bandas de frecuencia:
2.4 GHz con tasa máxima de transferencia de 250 Kbps, para este caso, modula en O-QPSK (Modulación con desplazamiento de fase en cuadratura con desplazamiento temporal).
868-928 MHz para tasa de datos entre 20 y 40 Kbps, para este otro, modula en BPSK (Modulación con desplazamiento de fase binaria).
5.9.1 Modulación OQPSK (Offset Quadrature Phase Shift Keying).
56
5.9.2 Modulación BPSK (Binary Phase Shift Keying).
En esta modulación se tiene como resultados posibles dos fases de salida para la portadora con una sola frecuencia. Una fase de salida representa un 1 lógico y la otra un 0 lógico.
Conforme la señal digital de entrada cambia de estado, la fase de la portadora de salida se desplaza entre dos ángulos que están 180° fuera de fase.
5.10 ZigBee y otras tecnologías inalámbricas
Anteriormente hemos hablado de las diferentes tecnologías inalámbricas que existen en el mercado a partir de lo anterior obtuvimos la siguiente tabla donde se muestra una comparación entre las tecnologías inalámbricas más utilizadas.
Nombre en el mercado ZigBee Wi-Fi Bluetooth
Estándar basado en: 802.15.4 802.11b 802.15.1
Principales Funciones: Monitoreo y Control Web, Correo,
Video
Reemplazo de cable físico
Bandas de frecuencia 2.4GHz,
868/915MHz
2.4GHz 2.4GHz
Recursos del sistema 4kb – 32 Kb 1 MB+ 250 Kb+
Tiempo de vida de la batería (días)
100 a 1000+ 0.5 a 5 1 a 7
Tamaño de la red Ilimitado 264 32 7
Número de canales 16 (2.4GHz)
10 (915MHz) 20 (868MHz)
11--14 79
Tipo de datos Digital Digital, audio Digital (texto)
Tasa de transferencia 250kbps (2.4GHz)
40kbps (915MHz) 20kbps (868MHz)
11Mbps 1Mbps
Rango de transmisión (metros)
1 a 100+ 1 a 100+ 1 a 10+
Introducción al mercado Baja Alta Media
Arquitectura Estrella, árbol, punto
a punto y malla
Estrella Estrella
Mejores aplicaciones Control de bajo costo
y monitoreo
Edificio con internet adentro
57
Tabla 1 Comparativa de diferentes tecnologías inalámbricas
En la siguiente figura se muestra los campos de aplicación de las diferentes tecnologías inalámbricas donde podemos observar la cobertura y velocidad a la que trabajan cada una así como sus principales aplicaciones
.
Ilustración 39 Grupos de aplicaciones que están en la mira de ZigBee
5.11 Aplicaciones de ZigBee
ZigBee puede ser empleado en una gran cantidad de ámbitos, por ejemplo dentro del área industrial se utiliza para sensores empotrados y de control; como detector de humo, intrusos. Dentro del área de la medicina ayuda a recolectar datos médicos; debido a que un dispositivo puede trabajar de manera autónoma hasta 5 años, antes de necesitar una nueva fuente de alimentación.
Consumo de potencia 30mA transmitiendo,
3mA en reposo
400mA transmitiendo, 20mA en reposo
40mA transmitiendo, 0.2mA en reposo
Precio Bajo Costoso Bajo
Complejidad Simple Complejo Simple
Métricas de éxito Confiabilidad, poder,
costo
Velocidad y flexibilidad
58
En el área de la domótica permite la automatización de sistemas como iluminación, calefacción, refrigeración, y sensores diversos.
Uno de los usos más comunes que se le dan es en la manipulación de sensores para la adquisición de datos de forma remota evitando así la constante intervención de los usuarios; además proporciona datos para mejorar los programas de mantenimiento preventivo.
En su forma básica puede trabajar en un área de comunicación de 10 metros con una tasa de transferencia de 250 Kbps. Para trabajar en sistemas embebidos los requerimientos de consumo son aún menores, debido a que se definen diferentes niveles físicos con tasas de transferencia de 20, 40 y la que proporciona la versión actual de ZigBee de 100 Kbps.
Como se ha indicado, la característica fundamental de 802.15.4 entre las WPAN es la obtención de costes de fabricación excepcionalmente bajos por medio de la sencillez tecnológica, sin perjuicio de la generalidad o la adaptabilidad.
Uno de los puntos más favorables que se obtienen mediante el uso del estándar 802.15.4 es la adecuación de uso en tiempo real por medio de slots de tiempo, lo que garantiza la no presencia de colisiones por CSMA/CA y el soporte integrado a comunicaciones seguras, además un dispositivo que trabaja con ZigBee puede transmitir en tres bandas de frecuencia diferentes.
5.12 Técnica de Acceso al Medio CSMA/CA
59
El protocolo CSMA/CA utiliza un mecanismo de evasión de colisiones basado en mensajes recíprocos de acuse de recibo que el transmisor y receptor intercambian.
La estación que desea transmitir escucha a la red. Si la red está ocupada, la transmisión se suspende hasta más tarde. Sin embargo, si el medio permanece libre durante un cierto período de tiempo (llamado DIFS, que es el espacio entre tramas), la estación puede transmitir la señal. La estación transmite un mensaje "Listo para enviar" (o abreviado RTS, por "Ready To Send") con información sobre la cantidad de datos que desea enviar y su velocidad de transmisión. El receptor, que por lo general es un punto de acceso, responde con un mensaje "Permitido para transmitir" (CTS por "Clear To Send") y después la estación comienza a enviar datos.
Cuando se han recibido todos los datos enviados por la estación, el receptor envía un aviso de acuse de recibo (ACK). Entonces, todas las estaciones cercanas esperan el tiempo estimado necesario para transmitir esa cantidad de información a la velocidad declarada
Ilustración 40 Acceso al medio CSMA/CA
5.13 Módulos de Comunicación XBee
60
operación de estos dispositivos ronda los 40mA, tanto para transmisión como para recepción, mientras que en el modo de bajo consumo se reduce a tan sólo 10uA. La tensión de operación es de 3 a 3,3V. Las opciones de antena son: antena chip integrada en el módulo, antena de cuarto de onda en el módulo, conector U.FL o RPSMA para antena externa al módulo.
Ilustración 41 Módulos XBee
5.13.1 Circuito básico y PINOUT del Xbee
La figura muestra las conexiones mínimas que necesita el módulo Xbee para poder ser utilizado. Luego de esto, se debe configurar según el modo de operación adecuado para la aplicación requerida por el usuario.
Ilustración 42 Conexiones mínimas requeridas para el Xbee.
61
microcontrolador, o directamente a un puerto serial utilizando algún conversor adecuado para los niveles de voltaje
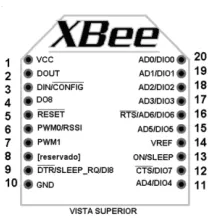
[image:61.612.99.507.186.496.2] [image:61.612.252.358.564.673.2]En la siguiente tabla se presentan las características de los pinout y una breve descripción de ellos, la distribución de los pines físicamente en el módulo XBee se muestra en la figura.
Tabla 2 Pinout del módulo ZigBee