CONTROL DE FLUJO SOBRE LA ESTELA CERCANA
DE PERFILES AERODINÁMICOS MEDIANTE LA
IMPLEMENTACIÓN DE MINI-FLAPS GURNEY
Tesis de Doctorado
Mauricio E. CAMOCARDI
Presentada ante la Facultad de Ingeniería de la
Universidad Nacional de La Plata
como requisito para la obtención del grado académico de
DOCTOR EN INGENIERÍA
Dirección de tesis:
Dr. Jorge Colman Lerner
Dr. Julio Marañón Di Leo
Jurado de tesis:
Dr. Jorge Lassig
Dr. Sergio Elaskar
III
A
GRADECIMIENTOS
Quiero expresar mi agradecimiento a todos los que de alguna manera han colaborado para que esta tesis fuera posible.
A mis directores Jorge y Julio, que me han dado la posibilidad de llevar adelante el doctorado y me han guiado en este largo camino.
A Sebastián y Ana por haber dedicado parte de su tiempo incondicionalmente.
A mis compañeros del laboratorio que han colaborado de alguna u otra forma brindándome un clima de amistad cada día.
Al Profesor Ulfilas Boldes por brindarnos sus valiosos conocimientos y experiencias en mecánica de los fluidos.
Finalmente a mi familia, mi padre y hermanos…
V
Í
NDICE
G
ENERAL
Resumen VIII
Abreviaturas X
Lista de Figuras XII
Lista de Tablas XV
1. Introducción 1
1.1. Motivación de la Tesis 1
1.2. Problemáticas Abordadas 2
1.3. Organización y Estructura de la Tesis 5
1.4. Principales Aportes 6
2. Conceptos Generales 7
2.1. Aerodinámica de Perfiles 7
2.2. Turbulencia 10
2.3. Control de Flujo 13
3. Metodología Experimental y Equipos 17
3.1. Introducción 17
3.2. Ensayos en Túnel de Viento 17
3.3. Construcción de Modelos 17
3.4. Sistemas de Actuación 19
3.4.1. Mini-flap Gurney Rotante 20
3.4.2. Mini-flap Gurney Rotante (variante 30°) 20
3.4.3. Mini-flap Gurney Móvil 21
3.5. Túnel de Viento 23
3.6. Equipos de Medición 24
3.6.1. Anemómetro de Hilo Caliente 24
VI
4. Procesamiento de Datos 32
4.1. Análisis de las Señales 32
4.2. Análisis Estadístico de Amplitud de Señal 34
4.2.1. Valor Medio 34
4.2.2. Varianza y Desvío Standard 35
4.2.3. Estadística Conjunta de Dos Señales 36
4.3. Análisis en Dominio del Tiempo 37
4.3.1. Autocorrelación 37
4.4. Análisis en Dominio de Frecuencia 39
4.4.1. Análisis de Fourier 39
5. Análisis de Resultados 45
5.1. Perfil de Velocidades Medias 45
5.1.1. Componente u 45
5.1.1.1. Caso Mini-flap Gurney Rotante 45
5.1.1.2. Caso Mini-flap Gurney Rotante (Variante 30°) 47
5.1.1.3. Caso Mini-flap Gurney Móvil 49
5.1.1.4. Comparación de Dispositivos - Velocidad Media u 50
5.1.2. Componente v 50
5.1.2.1. Caso Mini-flap Gurney Rotante 50
5.1.2.2. Caso Mini-flap Gurney Rotante (Variante 30°) 52
5.1.2.3. Caso Mini-flap Gurney Móvil 53
5.1.2.4. Comparación de Dispositivos - Velocidad Media v 54
5.2. Perfil de Intensidad de Turbulencia 55
5.2.1. Componente u 55
5.2.1.1. Caso Mini-flap Gurney Rotante 55
5.2.1.2. Caso Mini-flap Gurney Rotante (Variante 30°) 56
5.2.1.3. Caso Mini-flap Gurney Móvil 58
5.2.1.4. Comparación de Dispositivos - Intensidad de Turbulencia u 59
5.2.2. Componente v 60
5.2.2.1. Caso Mini-flap Gurney Rotante 60
5.2.2.2. Caso Mini-flap Gurney Rotante (Variante 30°) 61
5.2.2.3. Caso Mini-flap Gurney Móvil 62
5.2.2.4. Comparación de Dispositivos - Intensidad de Turbulencia v 64
5.3. Vectores de Velocidad Media 65
5.3.1. Caso Mini-flap Gurney Rotante 65
VII
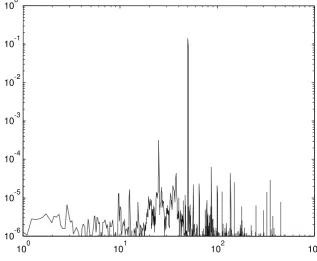
5.5. Espectros de Densidad de Potencia (PSD) 76
6. Conclusiones 81
6.1. Evaluación de Resultados 81
6.2. Conclusiones Generales 84
6.3. Futuras Líneas de Investigación 85
A. Características de Perfil NACA 4412 86
B. Especificaciones Técnicas de Instrumental 88
VIII
R
ESUMEN
La curvatura del borde de fuga y su geometría junto con la influencia sobre la condición de Kutta pueden ser usadas para manipular la sustentación, la resistencia de presiones y la estela de un perfil. Algunos investigadores han analizado varios mecanismos de control pasivo y activo de flujo para incrementar el coeficiente de sustentación, en particular, durante el despegue y aterrizaje de una aeronave. Uno de esos mecanismos es el mini-flap Gurney, el cual consiste en una pequeña placa plana localizada en la superficie inferior del perfil, tan cerca como sea posible del borde de fuga, a lo largo de la envergadura.
El objetivo es lograr un desplazamiento del punto de estagnación posterior (condición de Kutta) con un consecuente incremento de circulación y por lo tanto alcanzar una mejora en la sustentación. Uno de los investigadores pioneros en esta área fue Liebeck quien estudió un perfil simétrico tipo Newman con un mini-flap Gurney de altura de 1.25%c donde c es la cuerda del perfil. Él encontró un importante incremento de sustentación asociado al incremento del downwash en la estela cercana. Por otro lado, investigadores realizaron estudios que corroboraron que como otros dispositivos de control de flujo pasivo en el borde de fuga, el mini-flap Gurney aumenta la sustentación, el máximo coeficiente de sustentación y la pendiente de las curvas de CL versus ángulo de ataque, con pequeños cambios en la resistencia y en el ángulo de pérdida. Además, dichos autores encontraron que la mayor altura de tales dispositivos era la altura local de la capa límite en la superficie inferior cerca del borde de fuga. También observaron que la estela cercana era del tipo de una calle de vórtices de von Kármán.
IX
Kármán, porque debido a su simetría no habrá un downwash neto asociado con un incremento de sustentación.
Más aún, en la región de la estela cercana de un perfil con un mini-flap en la superficie inferior, bajo condiciones de sustentación, la intensidad del vórtice desprendido de la superficie superior será diferente que el que se desprende del de la superficie inferior. Esta asimetría será responsable del downwash neto extra y, por lo tanto, del incremento de sustentación. Los experimentos realizados por autores en trabajos previos, mostraron que en la región de la estela cercana, donde el sistema de vórtices comienza su formación, hay un pico importante de frecuencia en el espectro instantáneo de velocidades, generando la llamada inestabilidad de estela.
Existen muchos trabajos relacionados con la implementación de dispositivos de control de flujo en el borde de fuga. Algunos de ellos propusieron el uso de micro-placas capaces de moverse y hacer control de flujo activo sobre rotores de palas de turbinas eólicas. Otros, sugirieron el uso de mini-flaps Gurney activos para disminuir el desarrollo e intensidad de la estela.
X
A
BREVIATURAS
FG Flap Gurney
h Altura del Mini-flap Gurney
ρ Densidad del aire
c Cuerda del ala
U∞ Velocidad de la corriente libre
S Superficie de referencia
L Lift: Sustentación
D Drag: Resistencia aerodinámica CL Coeficiente de sustentación
CD Coeficiente de resistencia aerodinámica
x, y Ejes de coordenadas longitudinal y vertical
u, v Componentes longitudinal y vertical de velocidad
Re Número de Reynolds
St Número de Strouhal
t Tiempo
x(t) Señal muestreada función del tiempo
x
Valor medio de la señal muestreadax'(t) Fluctuaciones de la señal muestreada función del tiempo
x Desvío standard de las fluctuaciones de x(t) Rx(τ) Autocorrelación de la función x(t)
Rxy(τ) Correlación cruzada
Cx Coeficiente de autocorrelación de x(t)
Cu, Cv Coeficiente de autocorrelación de las componentes u y v
T Tiempo total de muestreo
N Número de muestras
t Intervalo de muestreo
fm Frecuencia de muestreo
FFT Fast Fourier Transform: transformada rápida de Fourier F Frecuencia de activación de mecanismos
k Frecuencia reducida de activación
XI
TI Escala integral de la turbulencia LI Escala espacial de la turbulencia
S(n) Función densidad de potencia espectral (PSD)
XII
L
ISTA DE
F
IGURAS
2.1.
Clasificación de las estrategias de control de flujo.
142.2.
Control activo de flujo predeterminado.
142.3.
Control activo reactivo de flujo con alimentación.
15 2.4.Control activo reactivo de flujo con re-alimentación.
153.1. Perfil NACA 4412. 18
3.2. Modelo en fase de construcción. 19
3.3. Movimientos de despliegue de mecanismos. 19
3.4. Esquema del mecanismo mini-flap Gurney rotante. 20
3.5. Esquema del mecanismo rotante alternativo. 21
3.6. Esquema del mecanismo del mini-flap Gurney móvil. 22 3.7. Modelo de ala con mini-flap Gurney móvil finalizado. 22
3.8. Sección de prueba del túnel de viento. 23
3.9. Anemómetro DANTEC Stream-Line. 25
3.10. Sensores de velocidad y temperatura. 25
3.11. Conexionado del sistema de anemometría de hilo caliente. 26
3.12. Equipamiento en el túnel de viento. 27
3.13. Vista en planta del modelo montado en el túnel de viento. 29 3.14. Ubicación de los puntos de comparación en el Ala 1. 30 3.15. Ubicación de los puntos de comparación en el Ala 2 y 3. 30
4.1. Muestreo discreto de una señal continua. 34
4.2. Función autocorrelación de una medición de velocidad instantánea de viento. 38
4.3. Ejemplo de espectro de una señal. 41
4.4. Efecto del muestreo a una frecuencia inferior a la frecuencia de Nyquist. 42 4.5. Ventana rectangular implícita al analizar un intervalo finito (0, T). 43 4.6. Ventana Hanning implícita al analizar un intervalo finito (0, T). 44
XIII
XIV
XV
L
ISTA DE
T
ABLAS
5.1. Frecuencia reducida para diferentes mecanismos. 78 5.2. Strouhal y PSD adimensional vs. k (Mini-flap Rotante, y/c = 0%c). 78 5.3. Strouhal y PSD adimensional vs. k (Mini-flap Rotante 30°, y/c = 0%c). 78 5.4. Strouhal y PSD adimensional vs. k (Mini-flap Móvil, y/c = 0%c). 78 5.5. Strouhal y PSD adimensional vs. k (Mini-flap Rotante, y/c = 0%c). 79 5.6. Strouhal y PSD adimensional vs. k (Mini-flap Rotante 30°, y/c = 0%c). 79 5.7. Strouhal y PSD adimensional vs. k (Mini-flap Móvil, y/c = 0%c). 79
A.1. Coordenadas de perfil NACA 4412. 86
1
CAPÍTULO 1
I
NTRODUCCIÓN
1.1. Motivación de la Tesis
Diferentes estudios han demostrado que la estela cercana detrás de un perfil con mini-flap Gurney tiene la forma de una calle de vórtices asimétrica con estructuras vorticosas de diferentes tamaños produciendo fluctuaciones en la circulación global del perfil.
De acuerdo al teorema de Kelvin cada vez que un vórtice se genera y es inyectado en la estela se crea la correspondiente circulación. El desprendimiento periódico de vórtices contra-rotatorios estará vinculado con la aparición de circulaciones de signos opuestos. Este proceso provocará variaciones en el tiempo de la circulación general alrededor del perfil alar produciendo variaciones en el ángulo de ataque instantáneo de la velocidad incidente.
Concentrémonos por un momento en el flujo de estela de cuerpos romos, por ejemplo de un cilindro. Un desprendimiento periódico de vórtices contra-rotantes de igual intensidad producirá variaciones de circulación que generarán variaciones periódicas de ángulo de ataque, de sustentación positiva y negativa y variaciones de resistencia. Un cuerpo que produzca una estela de vórtices de von Kármán experimentará fluctuaciones de este tipo. El promedio de las fuerzas de sustentación resultante será nulo porque esa estela es simétrica y los vórtices iguales y opuestos.
Si ahora nos concentramos en la estela de un perfil, podrá apreciarse que una mayor sustentación está asociada a un mayor downwash. Esto requiere una mayor asimetría del flujo en la estela cercana. Por lo tanto, no resulta realista la concepción de un modelo físico habitual del flujo detrás de un perfil con mini-flap Gurney basado en una estela simétrica de Von Kármán, la cual por ser simétrica es incapaz de provocar una desviación permanente del flujo en una dirección obviamente asociada al incremento permanente de sustentación.
2
desviación media del flujo asociada al incremento de sustentación provocado por estos mini-flaps.
Pero que sucedería si mediante dispositivos de control de flujo logramos aumentar dicha asimetría o anular completamente el vórtice que produce una disminución de la circulación generando estructuras vorticosas de diferentes tamaños detrás del borde de fuga. Esto nos hace pensar que la desviación media se vería incrementada y por ende el downwash en la estela cercana.
Sabemos que desde el mini-flap Gurney fijo se desprenden vórtices asimétricos. Será de especial interés estudiar el campo fluido-dinámico detrás del mini-flap Gurney mediante el análisis de los perfiles de velocidades, las escalas espaciales de las estructuras vorticosas, espectro de densidad de potencia e intensidades de turbulencia, entre otros, cuando se despliegan dispositivos activos en forma alternada entrando y saliendo del modelo o rotando sobre un eje a diferentes frecuencias.
1.2. Problemáticas Abordadas
La estela cercana, inmediatamente detrás de un perfil alar con una incidencia tal que genere sustentación es asimétrica. Esta asimetría se debe a las apreciables diferencias entre la capa límite proveniente de la superficie expuesta a baja presión del extradós con respecto a la capa límite de la superficie con sobrepresión del intradós. Al dejar el borde de fuga ambas capas límites se desprenden transformándose en capas de corte que se enrollan en vórtices constituyendo la estructura vorticosa característica de la estela cercana al borde de fuga. A mayor sustentación, las capas límites y las mencionadas capas de corte provenientes del intradós y extradós se diferenciaran aún más, por lo que la estructura vorticosa de la estela cercana será influenciada por la carga aerodinámica y las características del perfil.
Siguiendo corriente abajo al flujo descendente (downwash), se observará inicialmente un aumento de esa velocidad seguido por una rápida disminución de la misma. La asimetría del flujo de estela es grande en la región de apreciable downwash disminuyendo y tendiendo a la simetría a medida que disminuye el downwash en la estela lejana. En un estudio experimental y numérico de la estela cercana de un perfil con sustentación, Hah y Lakshminarayana [1] confirmaron este comportamiento donde la estela alcanza la simetría tan solo a una longitud de cuerda corriente abajo del borde de fuga. Estos autores confirmaron asimismo que la estructura lejana de la estela de un perfil sustentador es prácticamente simétrica no siendo ya influenciada ni por las características aerodinámicas del perfil ni por la carga aerodinámica. El downwash principal ocurre precisamente en la región de estela cercana al borde de fuga distanciada alrededor de una cuerda del mismo.
3
conocimientos no alcanzan aun para comprender la naturaleza física de los procesos aerodinámicos que provocan el incremento de sustentación en un perfil alar equipado con un mini-flap. Ello se debe a la complejidad introducida por la naturaleza no estacionaria de los vórtices contra-rotantes generados en la estela por ese mini-flap.
Escenarios de flujo no estacionario asociado a desprendimiento de estructuras vorticosas conforman un muy complejo cuadro aerodinámico aún no bien entendido. Al respecto, resulta útil recordar que hasta la fecha para modelos elementales como por ejemplo cilindros circulares no se encontraron teorías capaces de predecir el coeficiente de resistencia en función del número de Reynolds en condiciones de flujo con desprendimiento de vórtices.
Distintos tipos de mini-flaps fueron estudiados por numerosos investigadores [2-9] confirmando un apreciable incremento de sustentación, de la relación sustentación-resistencia y una reducción de la sustentación-resistencia de forma para condiciones de gran sustentación con respecto a los mismos valores obtenidos para las mismas alas sin ese mini-flap.
La referencia [6] describe resultados experimentales del comportamiento aerodinámico de estos mini-flaps. Estos autores hipotetizan que los vórtices contra-rotantes que se desprenden del borde de fuga inducen líneas de corriente semejantes a las que hubiera provocado una curvada y suave prolongación de la cuerda del perfil aerodinámico introduciendo una curvatura virtual desviando hacia abajo el punto de estagnación posterior virtual libre (condición de Kutta). Los modelos fluido-dinámicos usuales de perfiles con mini-flap describen dicho cambio en la ubicación del punto de estagnación, pero al mismo tiempo asumen la existencia de una estela (simétrica) de calle de vórtices contra-rotatorios de von Kármán sin considerar las mencionadas diferencias de flujo entre la estela cercana y el resto del flujo de estela.
En algunos estudios de eficiencia aerodinámica de perfiles con mini-flaps es frecuente encontrar la hipótesis que presupone que la existencia de la estela de vórtices es siempre perjudicial a una buena relación sustentación-resistencia. A fin de lograr reducciones de resistencia estabilizando la estela algunos autores sugieren el uso de ranuras, agujeros, flaps aserrados y cuerpos de estela [10], mientras que otros recomiendan la directa eliminación de la calle de vórtices contra-rotatorios detrás del mini-flap [11]. Por otro lado, hay autores [12] que efectuaron simulaciones numéricas con generadores de vórtices actuando dentro de la capa límite del perfil, cerca del borde de fuga.
En el rango de número de Reynolds de nuestro interés, conocido como bajo número de Reynolds (menores a 106), el flujo sobre el extradós para un dado ángulo de ataque en
4
En esas condiciones el flujo puede llegar a re-pegarse debido a la creciente entrada del flujo externo turbulento hacia la región de la pared, con la consecuente energización del flujo re-circulante constituyéndose una burbuja de separación. Las condiciones para que se forme esta burbuja laminar son función del número de Reynolds, la distribución de presiones, la curvatura y rugosidad de la superficie y la turbulencia de la corriente incidente entre otros.
En el rango de bajo número de Reynolds, el flujo separado se orienta según la tangente a la superficie en el punto de separación y la transición a la turbulencia tiene lugar en la capa de corte libre debido a la creciente susceptibilidad de ésta a la transición. La entrada de fluido turbulento de la zona de mayor velocidad provoca la re-adhesión del flujo externo, constituyendo la burbuja laminar ya mencionada. Aguas abajo del punto de re-adherencia, la recientemente formada capa límite turbulenta tiene más energía disponible para luchar contra el gradiente adverso de presiones evitando la separación. La habilidad de la capa límite turbulenta para resistir la separación es tanto mejor a medida que crece el número de Reynolds.
La aerodinámica de bajos Reynolds está estrechamente vinculada con aviones mono-motores, planeadores, palas de generadores eólicos y dispositivos clásicos de hipersustentación (flaps Fowler, por ejemplo), entre otros. Los perfiles de bajos Reynolds son aquellos diseñados específicamente para alcanzar buenas características de sustentación y resistencia dentro del rango de Reynolds mencionado más arriba. La pregunta que surge sobre estos temas es cómo controlar el flujo alrededor de perfiles de bajos Reynolds, buscando por ejemplo, una mejora en su performance. La evolución corriente abajo de una capa de corte y las características de mezcla de la capa de mezcla en la que se transforma, puede ser controlada inyectando perturbaciones adecuadas en la capa de corte.
Existen diferentes tipos de manipuladores de capa de corte utilizados para generar perturbaciones: los pasivos y los activos. Diferentes tipos de perturbación provocan diferentes estructuras en la capa de corte produciendo diferentes propiedades de transporte de la capa de mezcla resultante y determinando una estela con diferentes tipos de turbulencia.
5 1.3. Organización y Estructura de la Tesis
La metodología de trabajo se resume de la siguiente manera:
Investigación bibliográfica.
Determinación de las actividades experimentales. Construcción de los modelos.
Puesta a punto de los mecanismos de control de flujo.
Ensayo de los perfiles aerodinámicos en diferentes configuraciones. Procesamiento de los datos adquiridos.
Análisis de resultados y conclusiones.
El objetivo planteado en el plan de doctorado era investigar la influencia de los mecanismos de control sobre la estela cercana de perfiles aerodinámicos. Así, se propuso ensayar los modelos a una velocidad de flujo incidente pre-establecida con intensidad de turbulencia mínima. Cabe aclarar, que no se pretendió estudiar el comportamiento de dichos perfiles frente a la intensidad de turbulencia del flujo incidente siendo esto motivo de trabajos futuros.
Se eligió el perfil NACA 4412 por ser un perfil muy estudiado por diferentes autores, utilizado tanto en aeronaves que operan dentro de la capa límite atmosférica turbulenta como así también en la sección media de palas de aerogeneradores. Los modelos se construyeron en poliestireno expandido de alta densidad recubiertos con material plástico para darle un buen acabado superficial.
Se implementaron diferentes mecanismos de control de flujo en forma pasiva (mini-flap fijo) y activa como los del tipo móvil y rotantes. Dichos dispositivos se pusieron a punto antes de ser testeados en el túnel de viento. De esta forma se obtuvieron los parámetros principales como frecuencias máximas y amplitudes de desplazamiento o rotación según el caso.
Para cada ensayo se montó el ala en el túnel de viento, tomada de sus extremos mediante balanzas aerodinámicas fijas a la estructura del túnel. Se procedió a calibrar el anemómetro para comenzar los ensayos. Las primeras pruebas se realizaron con el perfil limpio para conocer la configuración característica de la estela de este perfil. Se continuó con los ensayos correspondientes al perfil con mini-flap Gurney fijo y por último se ensayaron los diferentes mecanismos de control de flujo.
6
Una vez que se obtuvo el conjunto de datos se procedió al procesamiento y análisis de los mismos, para obtener conclusiones o realizar nuevas experiencias mejorando el rendimiento buscado.
1.4. Principales Aportes
Es fundamental estudiar la forma en que las estructuras fluido-dinámicas se desarrollan naturalmente detrás del perfil y la interacción de dichas estructuras con las perturbaciones producidas por dispositivos de control de flujo para poder entender la influencia sobre las capas de corte que se forman en el borde de fuga y producen modificaciones en la ubicación del punto de estagnación posterior arrojando como resultado variaciones de downwash en la zona de la estela cercana.
El movimiento oscilante de los mini-flaps, permite la modulación de las estructuras turbulentas detrás del borde de fuga del perfil. La implementación de dichos mecanismos podría estabilizar el flujo alrededor del mismo y en la propia estela, controlando y reduciendo las fuerzas fluctuantes. De esta forma, un aumento de la sustentación y una reducción del incremento de la resistencia pueden ser alcanzados, traducido en una mayor eficiencia aerodinámica.
El uso de mini-flaps Gurney podría tener aplicación directa en el control de pérdida en aviones comerciales de gran porte. Los dispositivos clásicos de hipersustentación pueden ser simplificados sin disminuir su eficiencia, mediante la reducción del peso y complejidad, aumentando la autonomía y haciendo más seguros los despegues y aterrizajes. Por otro lado, si se emplean los mini-flaps en palas de aerogeneradores en forma activa, contribuirán a un buen control de la doble pérdida (double stall) mejorando la eficiencia aerodinámica de dichas palas en situaciones de grandes ángulos de ataque. Esta última aplicación tendrá influencia directa en el rendimiento de las turbinas eólicas, una de las fuentes actuales de generación de energía con recursos renovables (el viento).
Este trabajo se centró en la descripción cuantitativa y cualitativa de las características del flujo medio y sus fluctuaciones en la estela de perfiles con mini-flaps Gurney fijos y móviles situados en la cercanía del borde de fuga.
7
C
APÍTULO2
C
ONCEPTOS
G
ENERALES
2.1. Aerodinámica de Perfiles
Nos referimos a la aerodinámica, como a aquella rama de la física que estudia tanto las leyes físicas que gobiernan el desplazamiento de un cuerpo en el seno de un fluido, como así también, sus aplicaciones. De la infinidad de cuerpos estudiados nos centraremos particularmente en aquellos cuerpos que dotados de dispositivos generadores de fuerzas, permiten su movimiento y estabilidad en el fluido, como lo son las aeronaves. Pero será de especial interés para nosotros una de las partes más importantes de la aeronave destinada a la generación de sustentación, denominada ala. Dichos dispositivos, tienen una configuración geométrica determinada de acuerdo a su misión. Esta configuración está definida por la sección transversal del ala, denominada perfil, como así también por la distribución del mismo a lo largo de la envergadura conformando la planta alar.
Si se utiliza un perfil con gran eficiencia pero con una distribución poco apropiada podría arrojar como resultado un diseño pobre o viceversa. La forma y la inclinación del perfil respecto a la dirección de la corriente de aire son de gran importancia en la distribución de presiones que da origen a fuerzas aerodinámicas. Si consideramos al conjunto de todas las fuerzas actuantes sobre la planta alar como una única fuerza y la descomponemos según la dirección perpendicular a la corriente libre y su paralela, obtendremos dos fuerzas conocidas como sustentación (L) y resistencia (D). Dichas
fuerzas se pueden estimar por medio de las siguientes leyes:
L 2
SC
U
2
1
L
(2.1)D 2
SC
U
2
1
8
Siendo, ρ la densidad del medio donde se desplaza el cuerpo, U∞ la velocidad del fluido en la zona del ala, S la superficie de referencia alar y CL y CD los coeficientes de
sustentación y resistencia del ala respectivamente.
Si se observan dichas ecuaciones, se puede deducir que existen dos maneras posibles desde el punto de vista de la aeronave de aumentar la sustentación: aumentar el ángulo de ataque y por ende el CL o aumentar la velocidad. Pero existe un límite, ya que cuando
el ángulo de ataque supera cierto valor puede dar lugar al desprendimiento de flujo en la superficie del ala con la consecuente pérdida de sustentación. Dicho desprendimiento puede iniciarse tanto en el borde ataque como en el borde fuga dependiendo del tipo de perfil utilizado.
Existen asumpciones erróneas acerca del fenómeno que produce sustentación en un perfil aerodinámico o en una planta alar si consideramos un ala finita. Así, la imagen del ala circundada por un flujo más rápido de menor presión arriba y uno más lento abajo es una sobre-simplificación peligrosa que no considera la real estructura fluido-dinámica generada por un ala, como lo es el sistema de vórtices que la rodea. Uno de los errores más comunes es el siguiente: imaginemos dos volúmenes contiguos de fluido que se separan en el borde de ataque de un perfil tomando diferentes caminos, uno de ellos por el intradós y el otro por el extradós. No hay teoría que justifique que ambos volúmenes de fluido vuelvan a encontrarse en el borde de fuga al mismo tiempo. Dicha suposición que suele encontrarse en la literatura clásica no es correcta. En los flujos reales las partículas que fluyen sobre el extradós se adelantan considerablemente a las que fluyen sobre el intradós. El fluido de arriba va mucho más rápido.
Un cálculo de presiones sobre el ala, demuestra que si fuese válido el encuentro simultáneo en el borde de fuga de partículas contiguas antes del perfil las velocidades del extradós de los perfiles normalmente utilizados no alcanzarían a aportar la necesaria diferencia de presiones. Los perfiles basados en esta presunción deberían ser mucho más gruesos de lo que son para que los caminos del extradós e intradós sean lo suficientemente diferentes para aportar la sustentación necesaria. Si queremos ser más precisos, deberíamos reiterar que las fuerzas aerodinámicas que actúan sobre un ala en movimiento a través de un fluido y en particular la sustentación, son consecuencia de la variación en el tiempo de la cantidad de movimiento del fluido que rodea el ala debida a la particular estructura vorticosa generada por el ala. Hay sustentación porque hay un cambio en la velocidad y dirección de movimiento del aire.
9
Se define entonces como perfil a la figura que se forma al cortar un ala con un plano imaginario normal a la envergadura. Lo que vuela no es el perfil sino el ala. No obstante, de la adecuada elección del perfil y/o perfiles que configurarán la planta alar, resultará la eficiencia aerodinámica de la misma.
Dentro de los parámetros geométricos más importantes que tienen influencia en el diseño de perfiles podemos encontrar: el radio de borde de ataque, la curvatura, la distribución de espesores a lo largo de la cuerda (c) y por último, el borde de fuga.
Como se verá más adelante, este trabajo tiene como objetivo el estudio de la estela en perfiles, y como ya se mencionó, el borde de fuga juega un papel importante en el proceso de formación de la misma. Para cuerpos sólidos que tienen bordes afilados tales como los bordes de fugas en perfiles se puede aplicar la conocida condición de Kutta. Kuethe y Schetzer [14] enunciaron dicha condición como sigue:
Un cuerpo con un borde de fuga afilado que se mueve en el seno de un fluido
creará alrededor de sí mismo una circulación con tanta intensidad que mantiene el punto de estagnación posterior en el borde de fuga .
En aquellos fluidos que se desplazan alrededor de cuerpos con bordes afilados la condición de Kutta se refiere al patrón de flujo en el cual el fluido se aproxima a dicho borde desde ambos lados, se encuentra en el borde y luego fluye dejando el cuerpo. No hay fluidos en la realidad que fluyan alrededor del borde y se mantengan adheridos al cuerpo.
Cuando un cuerpo simétrico con curvas suaves tal como un cilindro con una sección oval se mueve con un ángulo de ataque nulo a través de un fluido, este no genera sustentación. Hay dos puntos de estagnación en el cuerpo: uno en el frente y el otro en la parte posterior. Ahora si este cuerpo se mueve con un ángulo diferente de cero a través del fluido, siguen existiendo dos puntos de estagnación, uno en la superficie de abajo cerca del borde de ataque y el otro en la superficie de arriba cerca de la zona posterior. La circulación alrededor de este cilindro es nula nuevamente y no hay sustentación generada a pesar de que haya ángulo de ataque positivo.
Si en cambio un perfil con un borde de fuga afilado comienza a moverse con un ángulo de ataque positivo, los dos puntos de estagnación están inicialmente localizados en la zona de abajo cerca del borde de ataque y en la parte superior cerca del borde de fuga, como en el caso del cilindro. Pero a medida que el aire pasa por la zona de abajo hacia el borde de fuga el fluido debe girar alrededor de este borde y desplazarse en la parte superior hacia el punto de estagnación. Como consecuencia se produce un vórtice de gran intensidad en la parte superior del perfil cerca del borde de fuga. A medida que el perfil se mueve, este se desplaza con dicho vórtice, llamado vórtice de arranque (starting vortex).
10
superior del mismo. El punto de estagnación en la parte superior se mueve progresivamente hacia el borde de fuga. Luego de que el perfil se ha movido una corta distancia, el punto de estagnación de la parte superior alcanza el borde de fuga y el vórtice de arranque se desprende quedando detrás. Con el tiempo, este se disipa debido a efectos viscosos. A medida que el perfil continúa su carrera, el punto de estagnación sigue en el borde de fuga. Los flujos de la parte superior e inferior se unen en el borde de fuga y dejan el perfil viajando paralelos uno respecto del otro. Es aquí donde se cumple la condición de Kutta. Una de las consecuencias de la condición de Kutta es que el aire en la parte superior viaja mucho más rápido que el aire debajo del perfil y por lo tanto ambos flujos nunca se vuelven a encontrar. Cuando un perfil se está moviendo con un ángulo de ataque positivo, la condición de Kutta se ha establecido y por lo tanto hay una circulación alrededor del perfil. De esta forma el perfil genera sustentación y su magnitud es calculada por el teorema de Kutta-Joukowski.
La condición de Kutta nos da ciertos indicios de por qué los perfiles siempre tienen borde de fuga afilado, a pesar de que no es deseable desde el punto de vista estructural o de manufactura. Una aeronave con un ala con borde de fuga suavemente redondeado generaría poca o nada de sustentación.
Es importante mencionar que en las asunciones previas, el fluido se encuentra en todo momento adherido a ambos lados del perfil. Ello no sería posible en un ala sin la implementación de elementos adicionales, si el ángulo de ataque aumenta de tal forma que el fluido no puede copiar la forma del perfil dando lugar al desprendimiento de flujo en el extradós y una consecuente reducción en la sustentación (stall).
Una de las mejoras más importantes en la aerodinámica de perfiles consistió en la alteración de la ubicación punto de estagnación con la consecuente modificación de la circulación introduciendo variaciones en la geometría del borde de fuga. Con el avance tecnológico surgieron nuevas ideas, y entre ellas la implementación de técnicas de control de flujo tanto pasivo como activo. Es así que aquí se estudió la implementación de uno de los dispositivos utilizados como elemento de control de flujo llamado mini-flap Gurney, cuyo efecto es modificar la ubicación del punto de estagnación posterior y como consecuencia la configuración de la estela.
2.2. Turbulencia
El estudio de flujos turbulentos es de gran importancia en muy variadas aplicaciones tecnológicas como lo son las ingenierías aeronáutica y naval, ingeniería mecánica y estructural, fenómenos de flujo interno, transferencia, combustión, etc.
11
producción de remolinos y disipación viscosa son efectos comunes observados en aplicaciones aeronáuticas, navales y flujos internos, entre otros.
Si se pretende mejorar u optimizar un dado problema de ingeniería que involucre turbulencia, será preciso entender y controlar al menos al particular conjunto de estructuras turbulentas que gobiernan los fenómenos de interés. El flujo de un fluido puede discurrir de manera ordenada y predecible en los valores instantáneos de las variables físicas involucradas: la velocidad, densidad, presión y/o temperatura. Si las condiciones iniciales y de contorno permanecen inalteradas en el tiempo, las condiciones de flujo no turbulento aparecerán claramente vinculadas a estas condiciones iniciales y de contorno siendo también invariables en el tiempo o variando de una manera totalmente predecible en el tiempo (oscilaciones periódicas).
En contraste, los valores instantáneos de las variables de un flujo turbulento de ninguna manera aparecen dependientes de condiciones iniciales y de contorno. Dichas variaciones son de carácter impredecible, aleatorio. Esta imprevisibilidad no es fruto de una insuficiencia en las mediciones. Por ejemplo, por más que se efectúen infinitas mediciones en una ruleta, estas no permitirán prever el próximo número a salir. La aleatoriedad es un comportamiento físico que caracteriza a ciertos sistemas . Tal es así, que los valores instantáneos de las magnitudes turbulentas son impredecibles. Ciertas visualizaciones han mostrado regiones con continuos cambios en los patrones de flujo exhibiendo un aparente flujo instantáneo confuso y desordenado.
Algunas denominaciones comúnmente utilizadas en turbulencia como turbulencia totalmente desarrollada requieren de una aclaración. Una turbulencia totalmente desarrollada es la que se puede desarrollar sin restricciones impuestas. Restricciones de este tipo serán contornos, fuerzas externas de carácter gravitacional, de flotabilidad, centrífugas, viscosas, eléctricas, magnéticas, etc. Si tenemos un canal por el que circula flujo turbulento no podremos considerar desarrollados a los remolinos cuyo tamaño sea similar al del canal, porque les son impuestas las fuerzas que conducen al fluido por el canal. Tampoco lo serán los remolinos que se desprenden de una hélice. Este razonamiento permite deducir que ningún flujo turbulento es generalmente totalmente desarrollado en las escalas correspondientes a las estructuras de gran energía.
12
Un análisis más meticuloso permite reconocer sin embargo la existencia de ciertos tipos de orden normalmente ocultos en el flujo global. Por ejemplo en algunos flujos pueden reconocerse remolinos elípticos de eje mayor vertical que persisten durante un cierto tiempo antes de deformarse o dividirse. Si bien los valores instantáneos de la velocidad de la corriente de estos remolinos siguen siendo aleatorios, su condición de elipticidad (en este ejemplo) no lo es. Esa elipticidad indica una preferencia geométrica y dinámica en los procesos de transporte. Es un tipo de organización espacial que indica un tipo de orden previsible en el hecho de que los remolinos (del ejemplo) son elípticos. Los flujos turbulentos suelen exhibir regiones con movimientos preponderantemente unidimensionales, y/o bidimensionales y/o generalmente tridimensionales con un amplio conjunto de muy diferentes escalas espaciales y temporales.
En la década que abarca aproximadamente desde mediados de 1960 hasta mediados de 1980 el conocimiento de la turbulencia fue revolucionado gracias al empleo de sofisticadas metodologías de análisis de datos experimentales mediante nuevas técnicas de muestreo condicionado y sofisticadas técnicas de visualización. Se comprendió que en muchísimos casos la turbulencia que contenía una importante porción de la energía cinética estaba organizada en diferentes y particulares estructuras coherentes. Dicha organización ocurre en remolinos de formas y tamaños muy diversos, como pueden ser jets, porciones delimitadas de fluido de muy baja velocidad (low velocity streaks) o con muy diversas fluctuaciones de velocidad a lo largo de superficies (sin giros), etc.
Para explicar más conceptualmente este innovador enfoque utilicemos un ejemplo de la medicina. Imaginemos un paciente con un profundo desarreglo en su sistema cardiovascular. El enfoque antiguo (cualitativamente análogo al antiguo enfoque global estadístico de la turbulencia) se concentraba y limitaba a analizar sus mareos, fatiga, falta de coordinación, desarreglos de la memoria, alteraciones de carácter, tomarle la temperatura y la presión. El enfoque moderno agrega a los procedimientos tradicionales el minucioso estudio fluido-dinámico de la sangre por arterias, venas y músculo cardíaco. Se considerará especialmente la sección libre de los conductos de sangre, su geometría, las características de eventuales limitaciones del flujo debidas a depósitos calcáreos o taponamientos, la forma y movimiento de las válvulas cardíacas, etc. Una cura debe intentarse restableciendo los patrones de flujo normales a través de las modificaciones geométricas locales capaces de gobernar la fluido-dinámica (aumentar la sección de los conductos sanguíneos con stents implantados en lugares críticos, by-pass remplazando conductos tapados).
13
2.3. Control de Flujo
Desde el comienzo, el hombre nunca ha estado satisfecho con el mundo que lo rodea, y trató de controlarlo o mejorarlo para tener efectos beneficiosos. Esto se aplica hoy en día a casi todas las disciplinas de la ciencia, y por ende, la fluido-dinámica no es una excepción. Desde los primeros tiempos, los fluidos fueron una materia muy atractiva y al mismo tiempo difícil de entender, lo que forzó a los investigadores a mejorar sus habilidades y conocimientos. Aun así después de entender parte del complicado comportamiento de los fluidos, los científicos nunca estuvieron satisfechos y pusieron todo su esfuerzo en controlarlo. Es aquí donde nace la disciplina Control de Flujo .
Es difícil de proveer una definición de Control de Flujo, pero una que se ajusta con cercanía a este trabajo es aquella enunciada por Fiedler [15]:
es un proceso u operación a través de la cual ciertas características de un fluido son manipuladas en cierta forma para lograr mejoras o una performance
técnica específica .
Esta definición de control de flujo está vinculada por el hecho de que esta manipulación esta efectuada por la conveniente amplificación interna de pequeñas perturbaciones . La palabra control parece ser demasiado estricta o a veces arrogante en el sentido que el fluido es solo inducido a comportarse en cierta forma. Este control es solo el desencadenamiento de las inestabilidades naturales por medio de actuadores de baja potencia, de tal forma que el fluido se desarrolla naturalmente en la forma deseada.
Una introducción excelente y una perspectiva histórica de control de flujo se pueden encontrar en Gad-el-Hak [16]. Allí se observa la división de dos grandes grupos de estrategias de control como lo son el control pasivo y activo de flujo. La diferencia esencial radica en que en el control pasivo no se requiere de potencia adicional entregada al fluido. Este tipo de control, es menos efectivo y más comprometedor, ya que la forma o geometría del cuerpo debe ser optimizada para solo una condición del flujo y no puede ser modificada. En cambio, el control activo es más flexible y efectivo en sus aplicaciones. Al mismo tiempo no es tan intrusivo como lo son los dispositivos de control pasivo y pueden producir incrementos substanciales en la performance para un amplio rango de condiciones de flujo.
14
Figura 2.1: Clasificación de las estrategias de control de flujo.
El control activo re-alimentado es también subdividido en diferentes métodos de control de acuerdo al efecto que se desee lograr. Los posibles lazos de control se describen en la Figura 2.2. Allí se muestra una estrategia típica de control predeterminado, siendo esta un simple lazo abierto. El control de flujo activo del tipo reactivo puede ser un lazo abierto de alimentación como en el caso de la Figura 2.3, o un lazo cerrado re-alimentado como en la Figura 2.4.
Figura 2.2: Control activo de flujo predeterminado.
Estrategias de Control de Flujo
Pasivo Activo
Predeterminado Reactivo
Alimentado Re-alimentado
Adaptativo Modelo Físico Sistemas Dinámicos Control Óptimo
Variable Controlada
[image:30.595.82.490.123.348.2]15
Figura 2.3: Control activo reactivo de flujo con alimentación.
Figura 2.4: Control activo reactivo de flujo con re-alimentación.
Los beneficios de implementar sistemas de control de flujo de forma eficiente sobre un amplio campo de aplicaciones van desde ahorrar miles de millones de dólares en el costo anual de combustible en vehículos terrestres, aéreos y marítimos, hasta lograr procesos industriales donde se ven involucrados los fluidos y que sean tanto económica como ambientalmente más competitivos. Dentro de esta amplia gama de aplicaciones, podemos mencionar la reducción de resistencia y el aumento en la sustentación en aeronaves; el aumento en el intercambio de masa, cantidad de movimiento o energía; la supresión del ruido inducido por el fluido; o una combinación de estos, entre otros. Existen diferentes fenómenos a través de los cuales estos objetivos pueden llevarse a cabo,
Variable Controlada
Potencia Controlador ( Actuador ) Sensor
Variable Medida
Señal de Alimentación
Variable Medida/Controlada Controlador
( Actuador )
Sensor Referencia
Señal de Alimentación
+
-16
como ser adelantar o atrasar la transición de flujo laminar a turbulento, prevenir o provocar el desprendimiento del flujo, o suprimir o aumentar los niveles de turbulencia.
El principal inconveniente de la implementación de control activo de flujo radica en la fabricación e implementación de los actuadores a través de los cuales se logra el control, ya que se busca que dichos dispositivos sean simples, de construcción económica y fáciles de operar, evitando efectos colaterales.
17
C
APÍTULO3
M
ETODOLOGÍA
E
XPERIMENTAL Y
E
QUIPOS
3.1. Introducción
Durante el desarrollo de la tesis, un conjunto de alas para el túnel de viento con y sin dispositivos de control de flujo fueron construidas. Estos modelos fueron diseñados para poder medir la distribución de velocidades en la estela mediante la técnica de anemometría de hilo caliente. Dicha técnica fue utilizada para estudiar las modificaciones introducidas cuando los mecanismos de control de flujo son desplegados a diferentes frecuencias. La descripción relativa al equipamiento utilizado en los experimentos se provee en las siguientes secciones. Una valiosa fuente de información en relación con la construcción, instrumentación y montaje para ensayos en túnel de viento puede ser encontrada en Barlow et al. [17].
3.2. Ensayos en Túnel de Viento
Los ensayos realizados en el túnel de viento se dividieron en varias etapas de acuerdo al programa propuesto para el desarrollo de la tesis. Estas etapas se organizaron como se muestra a continuación:
Medición de estela en perfil sin dispositivos de control de flujo (perfil limpio). Medición de estela en perfil con mini-flap Gurney fijo (control pasivo).
Medición de estela en perfil con dispositivos de control activo de flujo (mini-flap Gurney móvil y rotante).
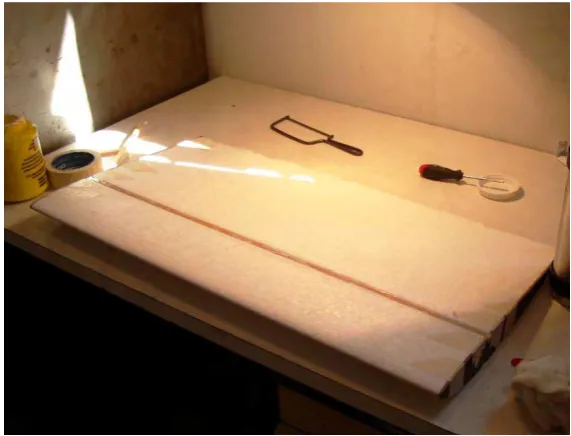
3.3. Construcción de Modelos
18
leves modificaciones de acuerdo al tipo de mecanismo de control de flujo implementado. El proceso de construcción se detalla a continuación.
Un perfil NACA 4412 (Figura 3.1) de 50cm (mini-flap rotante y rotante variante 30°) y 60cm (mini-flap móvil) de cuerda fue utilizado como perfil base de los modelos. Las coordenadas del perfil se detallan en el Apéndice A. La elección del perfil se basó en la predisposición del mismo a la implementación de dispositivos de control debido a su geometría y a la aplicabilidad en modelos reales. Este perfil es comúnmente utilizado en la sección media de palas de aerogeneradores, y dado que es un campo en constante crecimiento, muchos estudios ya han sido realizados acerca de la implementación de dispositivos de control de flujo. Así mismo, el espesor del perfil cerca del borde de fuga es de dimensiones considerables lo cual favorece el emplazamiento de mecanismos.
Figura 3.1: Perfil NACA 4412.
Con los datos de la distribución de puntos correspondientes al extradós e intradós, se cortaron con técnica de laser dos matrices de madera del tipo fibro-facil de 3mm de espesor. Con esta técnica se pretendía mantener fidelidad en la geometría real del perfil. Las dos matrices se adhirieron a una plancha de poliestireno expandido de densidad 20Kg/m3 con dimensiones mayores a las de perfil. Luego se procedió al cortado del
poliestireno mediante un hilo caliente copiando la forma de los perfiles de fibro-facil. Con el modelo cortado, se comenzó a revestir mediante un material plástico denominado "alto impacto" de 0,5mm de espesor. Este material se pegó a la superficie con adhesivo de contacto logrando un buen acabado superficial. Por último se colocó un tubo de acero inoxidable de un diámetro inferior al espesor del perfil por medio del cual se transmiten las cargas y se fija la posición del ángulo de ataque en caso de que se quieran medir fuerzas aerodinámicas.
19
Figura 3.2: Modelo en fase de construcción.
3.4. Sistemas de Actuación
Los sistemas de actuación pueden ser divididos en dos grupos: mini-flap Gurney rotante y móvil . Se intentaron diferentes dispositivos con la idea de perturbar la estela del perfil de formas variadas.
Figura 3.3: Movimientos de despliegue de mecanismos.
La diferencia entre ambos mecanismos radica en el modo que el dispositivo es desplegado. En el primero, el mini-flap Gurney se despliega en forma rotativa con un movimiento de vaivén y una amplitud máxima de 90° para el primer modelo y de 30° para el segundo modelo. En cambio en el tercer modelo, el mini-flap Gurney se desplaza en movimiento ascendente y descendente, con una amplitud máxima de 8mm desde la superficie del intradós. Cuando el mini-flap Gurney asciende, se oculta completamente en el espacio que conforman las superficies superior e inferior del modelo. Es de destacar que todos los mecanismos específicos para los movimientos de los mini-flaps fueron diseñados
[image:35.595.169.455.91.309.2]20
y construidos como parte de trabajo de investigación. La forma en que ambos dispositivos se accionan se observa en la Figura 3.3 y se describen a continuación.
3.4.1. Mini-flap Gurney Rotante
El mecanismo del mini-flap rotante consiste en un perfil extrudado de aluminio con una sección tipo L colocado a lo largo de la envergadura y capaz de rotar alrededor de un eje ubicado en el vértice del mini-flap y fijo al modelo. En la Figura 3.4 se observa un esquema simplificado del mecanismo. Un motor tipo Astro Cobalt-05 de corriente continua con una capacidad máxima de rotación sin carga de 16000RPM, tiene adosado al eje un cigüeñal con una articulación para transmitir el movimiento. Una biela unida a la articulación transforma el movimiento de rotación del motor en movimiento traslacional. En la parte superior del mini-flap hay una segunda articulación que toma la biela por el otro extremo y convierte nuevamente la traslación en rotación. La cinemática del mecanismo está diseñada de tal forma que el movimiento final es una rotación alternada con una amplitud máxima de 90°. En este modelo la amplitud de rotación es fija, pero el sistema permite ajustar la frecuencia de despliegue del mini-flap Gurney variando las RPM del motor. La frecuencia máxima alcanzada por el sistema es de 44Hz.
Figura 3.4: Esquema del mecanismo mini-flap Gurney rotante.
3.4.2. Mini-flap Gurney Rotante (variante 30°)
21
El mecanismo es similar al primer diseño donde un motor de altas prestaciones transmite el movimiento rotacional a lineal y luego transformado a rotacional nuevamente mediante un conjunto de bielas. En el esquema siguiente (Figura 3.5) se presenta un diagrama de la cinemática del mecanismo descrito.
Figura 3.5: Esquema del mecanismo rotante alternativo.
En este caso, el mini-flap de aluminio de 10mm de altura se encuentra adosado a un eje de bronce de 3mm de diámetro en forma tangente y a lo largo de la envergadura. La amplitud de rotación es de 30° fija con la posibilidad de modificar la frecuencia cambiando la velocidad de rotación del motor. La frecuencia máxima alcanzada por el sistema es de 50Hz.
3.4.3. Mini-flap Gurney Móvil
Este dispositivo basa su funcionamiento en un sistema electro-mecánico compuesto por un motor de altas prestaciones que acciona un balancín al cual se encuentra adosado el mini-flap Gurney.
Respecto del sistema electromecánico ubicado en su interior, se trata de un listón de balsa, de sección triangular y 780mm de longitud, el cual se laminó con fibra de vidrio y resina, incluyendo un tubo de carbono hueco, vinculado a lo largo de la balsa sobre el espesor máximo (el espesor mínimo es el "borde de fuga" de la balsa triangular). Del lado del espesor mínimo se continuó con el laminado en dirección perpendicular, configurando el mini-flap Gurney de altura 1.3%c (c = 600mm) equivalente a 8mm.
El tubo de carbono funciona como eje, anclado al ala con cuatro rodamientos blindados de altas RPM, los cuales permiten movimientos rotativos con mínimo roce. Del centro de la basa laminada, en el mismo plano, se extiende una pieza triangular de 3cm de lado. De uno de sus vértices continua una varilla de acero delgada de 2.5mm de diámetro y 30mm de longitud. Debajo de la mencionada pieza hay dos pequeños resortes, paralelos, cuyo objetivo es dotar de "recuperación" al sistema cuando es accionado por el motor.
22
Sobre la varilla actúa un pequeño cigüeñal vinculado al eje de un motor eléctrico de corriente continua de 200W, con un voltaje máximo de 15V. En el perno del cigüeñal hay un pequeño rodamiento blindado de altas RPM que transmite el movimiento rotatorio del motor haciendo oscilar la pieza de balsa laminada con un consecuente movimiento ascendente-descendente del mini-flap Gurney. La velocidad de giro del motor es regulada por un circuito electrónico que genera una señal cuadrada y que luego es amplificada. Dicha señal tiene una amplitud constante de 12Volts y mediante un potenciómetro se ajusta el ciclo de actividad de la señal permitiendo variar las RPM del motor y de esta forma la frecuencia oscilatoria vertical del mini-flap Gurney.
Figura 3.6: Esquema del mecanismo del mini-flap Gurney móvil.
Figura 3.7: Modelo de ala con mini-flap Gurney móvil finalizado.
[image:38.595.140.426.468.696.2]23
El conjunto balancín-mini-flap se diseñó de forma tal de utilizar la menor cantidad de material posible para de esta forma reducir la masa. Como es sabido la masa juega un papel preponderante en el diseño de sistemas mecánicos vibrantes, y nuestro caso no escapa a ello. Es por ello que debido a la naturaleza del sistema la frecuencia máxima alcanzada es superior a los 50Hz con una amplitud máxima de 8mm y bajos niveles de vibración.
En la figura 3.6 se puede apreciar un esquema del mecanismo interior con el que se encuentra equipado el modelo. Así mismo, en la figura 3.7 se observa el modelo finalizado.
3.5. Túnel de Viento
El túnel de viento del Laboratorio de Capa Límite y Fluido-dinámica Ambiental es un túnel de circuito cerrado de bajas velocidades construido en 1968 y cuya sección de prueba actual fue modificada en el año 1984 para poder reproducir la distribución de velocidades en la baja capa límite atmosférica. Para el control de la turbulencia del fluido incidente, una grilla tipo panal de abeja y un set de perfiles paralelos al piso y capaces de rotar a lo largo de un eje fueron incluidos aguas arriba de la sección de prueba. En el piso del túnel, se pueden ubicar elementos prismáticos de espaciado regular, cuyo objetivo es la simulación de la "rugosidad" dada por edificación, arboleda, etc., lo que le imprime características propias a la baja capa límite atmosférica turbulenta.
[image:39.595.170.455.479.690.2]24
En el presente trabajo no se deseó estudiar el efecto de flujos turbulentos incidentes sobre el modelo por lo que no se hace uso de los deflectores aguas arriba para cambiar las condiciones del flujo. De este modo los deflectores se ubican en forma paralela al piso del túnel y sin rugosidad en la superficie lo que nos da la condición de uniformidad de velocidades en altura y con la mínima intensidad de turbulencia, llamándose a esta condición túnel limpio . Un esquema de la sección de prueba se muestra en la Figura 3.8.
La sección de prueba es de 1m de alto por 1.4m de ancho y 2m de largo, donde una de las paredes laterales incluye una ventana de vidrio para visualización. Otra ventana pero de dimensiones menores se ubica en el techo para colocar fuentes de iluminación y captura de fotografías y videos. Una puerta en la zona posterior permite el acceso a la zona de pruebas. Este túnel de viento no posee ni tobera ni difusor conservando aproximadamente constante el área de la sección transversal a lo largo del circuito. Un anemómetro de hilo caliente modelo Dantec Flow-Master puede ser montado a una altura de referencia aguas arriba de la sección de prueba para tomar la lectura de velocidad de la corriente incidente de aire como así también el valor de temperatura. Este equipo tiene un rango útil de medición que va desde 0 a 30m/s con una resolución de 0.1m/s en dicho rango y un error máximo de 5%. La velocidad del fluido en la corriente libre puede variar desde 0 a 20m/s siendo forzado mediante un ventilador conducido por un motor de corriente continua de 50HP. Tanto el motor como el ventilador están montados en una base de concreto para reducir la transmisión de vibraciones a las paredes del túnel.
La velocidad promedio del fluido generada en el túnel es estable en el tiempo con una intensidad de turbulencia mínima de 1,8%.
3.6. Equipos de Medición
3.6.1. Anemómetro de Hilo Caliente
La teoría general del funcionamiento de un anemómetro de hilo caliente, está sustentada por las leyes termodinámicas de la transferencia de calor entre el alambre y el fluido, evidenciada por las variaciones de la resistencia del alambre con la temperatura. La pérdida de calor desde el alambre, inmerso en una corriente de fluido, es un proceso físico muy complejo en el que intervienen varios fenómenos al mismo tiempo: conducción, radiación, convección libre y convección forzada. En la mayoría de las aplicaciones en gases, en los que la diferencia de temperaturas entre el sensor y el fluido son menores a 300°C, la radiación puede despreciarse. De esta manera, la pérdida de calor dependerá de los siguientes factores:
La velocidad del aire.
25
Las dimensiones y propiedades físicas del alambre. La compresibilidad del aire.
El ángulo entre la dirección del flujo medio y el alambre.
Un anemómetro de hilo caliente modelo DANTEC Stream-Line fue utilizado como instrumento de medición de velocidades de flujo en la estela del perfil. El principio de funcionamiento es del tipo CTA (Constant Temperature Anemometer). El equipo permite la colocación de hasta seis módulos independientes e intercambiables lo que facilita su mantenimiento o reposición, más un módulo interno correspondiente al sensor de temperatura. Cada módulo puede ser asociado a un canal o hilo caliente pudiendo conformar combinaciones entre puntas simples, dobles o triples. En la Figura 3.9 se puede observar el equipo con los módulos incorporados.
Figura 3.9: Anemómetro DANTEC Stream-Line.
[image:41.595.171.455.516.733.2]26
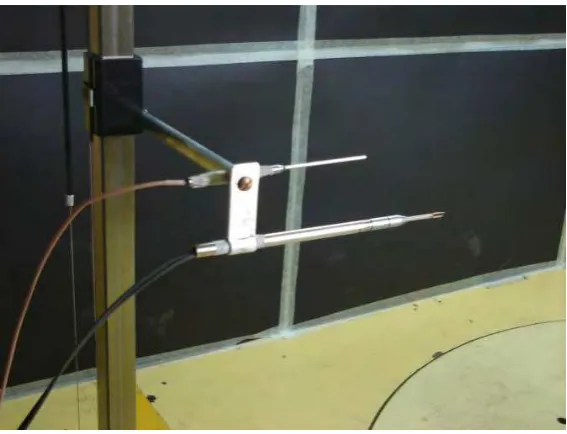
Existe una diversidad de sensores con diferentes especificaciones y aplicaciones compatibles con el equipo antes mencionado. En nuestro caso, para la caracterización del flujo en la estela del perfil utilizamos sensores tipo 55R51 (DANTEC). Este sensor tiene un rango de velocidades que va de 0 a 250m/s y una respuesta en frecuencia de hasta 10 KHz, lo que nos da un amplio rango de trabajo. También se utilizó un sensor de temperatura cuya finalidad es compensar las variaciones de temperatura de los sensores de hilo caliente. La Figura 3.10 muestra ambos sensores montados en el posicionador vertical. En el Apéndice B pueden encontrarse las especificaciones técnicas en forma detallada.
Todo el sistema de medición de velocidades instantáneas cuenta con los siguientes elementos:
Sensor de velocidad. Soporte de sensor.
Cable sensor-anemómetro. Equipo de tratamiento de señal. Cable anemómetro-placa adquisidora. PC con el software de adquisición.
El sistema de adquisición es una placa de conversión analógico/digital de 16 bits con 16 canales y permite muestrear señales con una frecuencia máxima de 1MHz.
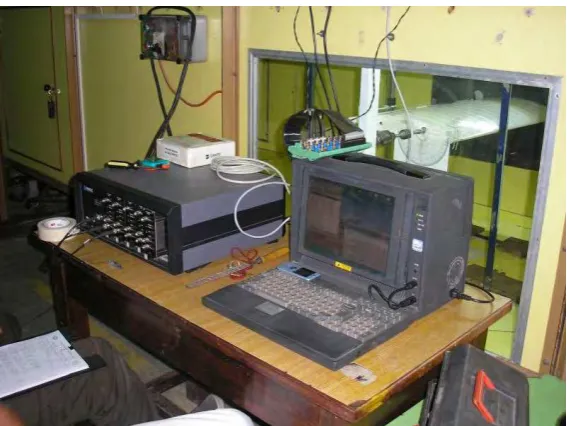
[image:42.595.124.442.517.722.2]A continuación se puede observar un esquema del conexionado de los diferentes componentes para la adquisición de señales (Figura 3.11) y la disposición de los mismos en el túnel de viento (Figura 3.12).
Figura 3.11: Conexionado del sistema de anemometría de hilo caliente.
PC
Placa A/D
Placa Conexión
Sensor temperatura
Sensor Soporte U∞
27
Figura 3.12: Equipamiento en el túnel de viento.
3.6.2. Posicionador Vertical
Dicho mecanismo es un dispositivo diseñado ad-hoc con el objetivo de agilizar el procedimiento de medición. Como su nombre lo indica, su tarea es situar la punta anemométrica en la posición de medición adecuada solo en la dirección vertical del túnel de viento.
Está compuesto por un tubo de acero inoxidable de sección cuadrada de longitud similar a la altura de la sección de prueba del túnel. Sobre el tubo, corre una guía de aluminio con un brazo de extensión capaz de sostener tanto el sensor de hilo caliente como el de temperatura. Un motor de pasos con una polea dentada en su eje se ubica en uno de los extremos del tubo. Mediante una correa dentada del mismo paso que la polea, el motor transmite el movimiento a la guía. En el extremo opuesto una roldana le da tensión a la correa para evitar errores en el desplazamiento. Como complemento, dos zapatas se colocaron en los extremos del tubo, de las cuales una de ellas es regulable en altura para permitir la sujeción a las paredes del túnel.
28
precisión de 0.02mm dada por la relación entre la cantidad de dientes de la polea y la cantidad de pasos por giro del motor.
3.7. Montaje en Túnel de Viento
Una vez terminados los modelos, los mismos se colocaron en el túnel de viento para la realización de los ensayos. La disposición debe ser tal que permita la medición de la estela detrás del perfil sin perturbación alguna, ya sea de los elementos en la periferia como así también el mismo sensor de hilo caliente y soporte. Por tal motivo, se tomó la sección central del modelo siendo poco perturbada por la capa límite de los paneles laterales y el posicionador ubicado por detrás del sensor de velocidad y temperatura. Cabe aclarar que la técnica de anemometría de hilo caliente, es una técnica clasificada por varios autores como intrusiva , y si bien hay errores asociados a la presencia del sensor y soporte, se busca minimizar este efecto con un adecuado montaje.
El ala fue montada en condición empotrada-empotrada y fijada a la estructura del túnel mediante dos balanzas aerodinámicas. Hay que aclarar que la única forma de fijar los modelos es por medio de dichas balanzas y que si bien se han medido cargas aerodinámicas en alguno de los modelos, el análisis de dichos resultados escapa al objetivo de este trabajo siendo motivo de estudios futuros.
El sistema permite la implementación de un mecanismo ad-hoc de cambio de ángulo de ataque con una precisión de 0,025°. El equipo está constituido por un conjunto de engranajes, un motor de pasos y es controlado por un ordenador mediante un amplificador de señal. Conociendo la relación de transmisión y el número de pasos del motor, se puede establecer el mínimo valor de cambio de ángulo de ataque. El engranaje principal esta solidario al tubo central y por lo tanto cuando se aplica una acción en el motor de pasos se verá reflejada mediante dicho engranaje en el ángulo de ataque del perfil. Un software asociado permite ajustar en una interfaz gráfica el valor del ángulo de ataque deseado, pero hay que mencionar que no es un sistema realimentado ya que no existe una medición del ángulo de ataque.
29
[image:45.595.138.483.177.416.2]zona es de forma triangular y puede rotar a modo de flap para ajustar la distribución de velocidades en la capa límite del panel. De esta forma, se puede minimizar el error introducido por la interacción de ambas capas límites en la zona de intersección.
Figura 3.13: Vista en planta del modelo montado en el túnel de viento.
Ambos paneles están construidos con una estructura de hierro soldado, donde uno de ellos está revestido con placas de acrílico para poder visualizar el modelo y el otro con madera pintada de color negro. Ambos lados tienen perforaciones para poder pasar el tubo de fijación. En la Figura 3.13 se muestra un esquema del montaje en el túnel de viento.
3.8. Metodología de Ensayo
Una vez finalizada la fase de montaje en túnel, se procedió a la medición de la estela detrás del perfil. Se utilizó la misma metodología de ensayo para todos los modelos testeados. Un resumen del procedimiento se detalla a continuación:
Fijación de la velocidad de ensayo. Ubicación de la punta anemométrica. Fijación del ángulo de ataque.
30
La velocidad de ensayo se puede ajustar por medio del controlador del ventilador y fue medida con el anemómetro de hilo caliente de punta blindada descrito anteriormente. Si bien los ensayos se realizaron a diferentes velocidades, se decidió comparar los resultados para una velocidad solamente.
Figura 3.14: Ubicación de los puntos de comparación en el Ala 1.
Figura 3.15: Ubicación de los puntos de comparación en el Ala 2 y 3.
La punta anemométrica se colocó de forma tal de captar las estructuras vorticosas más importantes detrás del perfil. De esta forma se decidió ubicarla como ya se ha dicho en la sección media del modelo, a diferentes posiciones aguas abajo y a diferentes alturas por encima y por debajo del borde de fuga. La distribución de posiciones en altura es mucho más densa que la distribución aguas abajo. Es por ello, que se diseñó el mecanismo de posicionado vertical automático dándole eficiencia al proceso de medición. Un esquema de los puntos de comparación se muestra en la Figura 3.14 y Figura 3.15.
De la misma forma, se varía la frecuencia de accionamiento de los mecanismos de control de flujo observando la tendencia de los mismos y que efecto tiene sobre la estela como ser si hay modificaciones en el espectro de potencia, variaciones de las escalas turbulentas e intensidad de turbulencia, entre otras.
2%c 75%c
0%c -2%c
2%c 10%c
0%c