I
NSTITUTO
P
OLITÉCNICO
N
ACIONAL
E
SCUELA
S
UPERIOR DE
I
NGENIERÍA
M
ECÁNICA
Y
E
LÉCTRICA
“
M
ONITOREOY
G
ESTIÓN DE LAI
NFORMACIÓN DE UNP
ROCESO DEM
ANUFACTURAA
N
IVELC
ONTROL”TESIS
Q
UE
P
ARA
O
BTENER
E
L
G
RADO
D
E
I
NGENIERO EN
C
ONTROL
Y
A
UTOMATIZACIÓN
PRESENTAN
GUZMÁN PÉREZ SANDRA IVONNE
VÁZQUEZ SILVA MARÍA GUADALUPE
A
SESORESM. en C. HUERTA GONZALEZ PEDRO FRANCISCO
Ing. B
ENÍTEZV
ELÁZQUEZL
UISA
RTURORESÚMEN
En este proyecto de tesis se plantea la integración de los niveles del entorno de la Manufactura Integrada por Computadora (CIM), a través del monitoreo para la gestión de la información de un proceso de manufactura tomando como referencia el sistema de dos bandas transportadoras que se encuentran ubicadas en el Laboratorio de Comunicaciones Industriales B08 de los Laboratorios Pesados de la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Zacatenco.
El contenido de este trabajo se basa en la integración de las topologías de red que conforman el sistema, utilizando las redes industriales de comunicación como DeviceNet™, ControlNet™, Ethernet/IP™ y los medios físicos requeridos para cada nivel de comunicación.
Se utilizó la estructura del modelo OSI, las capas del Protocolo Industrial Común (CIP) así como los niveles del sistema de Manufactura Integrada por Computadora para lograr el intercambio de información entre el proceso y los usuarios.
Para establecer el monitoreo se realizó el diseño de la interfaz Humano-Máquina (HMI) para cada uno de los niveles del sistema, utilizando un software del fabricante Rockwell Automation, Inc.
Para la implementación del monitoreo desde un punto en cualquier estación de una red de área local se utilizó el módulo 1756-EWEB, configurando en él, los parámetros necesarios para la visualización de la información de los elementos del sistema.
ÍNDICE
RESÚMEN ... I
ÍNDICE DE FIGURAS ... VI
ÍNDICE DE TABLAS ... XV
INTRODUCCIÓN ... XVII
GLOSARIO ... XVIII
OBJETIVO GENERAL ... XX
OBJETIVOS ESPECÍFICOS ... XX
PLANTEAMIENTO DEL PROBLEMA ... XXI
JUSTIFICACIÓN ... XXII
CAPÍTULO 1 INTRODUCCIÓN Y ESTADO DEL ARTE ... 1
1.1. Estado del arte ... 2
1.1.1. Revisión sobre el monitoreo y control de procesos a través de teléfono móvil ... 2
1.1.2. Revisión sobre el monitoreo y control de procesos a través de Internet ... 6
1.1.3. Revisión sobre el monitoreo y control de procesos industriales basada en el estándar de comunicaciones OPC ... 11
1.1.4. Revisión sobre el monitoreo y control remoto con acceso inalámbrico bidireccional a procesos industriales ... 13
1.1.5. Revisión sobre el diseño e implementación de un sistema de control y monitoreo basado en HMI-PLC para un pozo de agua potable ... 15
1.1.6. Revisión sobre el control y monitoreo en procesos industriales ... 16
1.1.7. Revisión sobre el uso de la red industrial DeviceNet™ para la automatización de un sistema de bandas transportadoras ... 18
1.1.8. Revisión sobre el control y monitoreo de una potabilizadora de agua por medio de la red industrial ControlNet™ ... 19
1.2. Análisis del estado actual ... 20
CAPÍTULO 2 ... 22
MARCO TEÓRICO ... 22
2.1. Tipos de sistemas de control ... 23
2.1.1. Control centralizado ... 23
2.1.2. Control distribuido ... 23
2.2. Modelo CIM ... 24
2.3. Jerarquía de las redes de comunicación según el modelo CIM ... 26
2.3.1. Redes de Información ... 27
2.3.2. Redes de Campo ... 27
2.4. Modelo OSI ... 28
2.4.1. Funciones de capas individuales de OSI ... 30
2.5. Protocolo Industrial Común (CIP) ... 33
2.6. Redes industriales ... 35
2.6.1. DeviceNet™ ... 35
2.6.2. ControlNet™. ... 37
2.6.3. Ethernet/IP™. ... 41
CAPÍTULO 3 ... 43
ARQUITECTURA INTEGRADA DE AUTOMATIZACIÓN... 43
3.1. Topología de redes de datos ... 44
3.1.1. Redes con topología bus ... 44
3.1.2. Redes con topología de estrella ... 45
3.1.3. Redes con topología de anillo ... 45
3.2. Niveles de comunicación ... 46
3.3. Red industrial de dispositivos ... 47
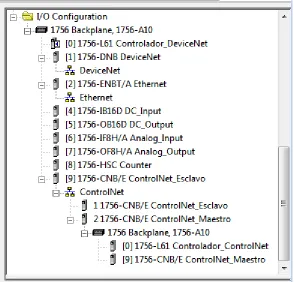
3.3.1. Módulo 1756-DNB/C DeviceNet Escáner ... 49
3.4. Topología de la red ControlNet™ ... 68
3.5. Topología de la red Ethernet/IP™ ... 71
3.6. Módulo 1756-EWEB/A. ... 73
CAPÍTULO 4 ... 76
PROGRAMACIÓN Y APLICACIÓN ... 76
4.1. Configuración de la comunicación ... 77
4.1.1. Asignación de la IP de la computadora ... 77
4.1.2. Asignación de la IP de los dispositivos de cada red DeviceNet™, ControlNet™ y Ethernet/IP™ ... 78
4.1.3. Configuración del Driver de Comunicación Ethernet en RSLinx ... 79
4.2. Programación en RS-Logix 5000 ... 84
4.2.1. Configuración de la comunicación de las redes del sistema ... 87
4.2.2. Asignación de Tags ... 91
4.2.3. Envío de Tags entre los diferentes niveles de comunicación ... 93
4.3. Configuración de los nodos de la red en RSNetworx ... 97
4.3.1. Configuración de los nodos de la red DeviceNet™ ... 97
4.3.2. Configuración de los nodos de la red ControlNet™ ... 99
4.4. Diagramas de flujo ... 101
4.4.1. Banda transportadora 1 ... 101
4.4.2. Banda transportadora 2 ... 103
4.4.3. Red DeviceNet™ ... 105
4.4.4. Red ControlNet™... 107
4.4.5. Red Ethernet /IP™ ... 109
4.4.6. Envío de datos entre los diferentes niveles de comunicación DeviceNet™, ControlNet™ y Ethernet/IP™ ... 111
4.4.7. Interfaz Hombre-Máquina para la red DeviceNet™ ... 113
4.4.8. Interfaz Hombre-Máquina para la red ControlNet™ ... 113
4.4.9. Interfaz Hombre-Máquina del sistema SCADA ... 113
4.4.10. Envío de información al módulo EWEB ... 117
4.5. Programación en Factory Talk View ... 120
4.5.1. Diseño de la Interfaz Humano Máquina (HMI) ... 120
4.5.2. Configuración de la Comunicación ... 123
4.5.3. Configuración de la Aplicación ... 125
4.7. Caso práctico de aplicación: Monitoreo en la línea de producción de bebidas
carbonatadas ... 143
4.7.1. Introducción ... 143
4.7.2. Consideraciones del sistema ... 144
4.7.3. Análisis de la propuesta ... 145
4.8. Interfaz Gráfica de la red ControlNet™ ... 148
4.9. Interfaz Gráfica para el sistema SCADA ... 162
4.10. Módulo 1756-EWEB/A. ... 171
CAPÍTULO 5 ... 175
RESULTADOS Y CONCLUSIONES ... 175
5.1. Resultados. ... 176
5.2. Análisis económico... 189
5.2.1. Análisis del costo de desarrollo de software ... 189
5.2.2 Análisis de costos de los componentes físicos ... 196
5.2.2. Costo total del proyecto ... 197
5.3. Conclusiones ... 198
5.4. Trabajos a futuro ... 201
ÍNDICE DE FIGURAS
CAPÍTULO 1 INTRODUCCIÓN Y ESTADO DEL ARTE
Figura 1.1 Diagrama General del sistema de transmisión de información remota…………..….…3
Figura 1.2 Aplicación prototipo de Telecontrol y envío de alertas……….….4
Figura 1.3 Monitoreo y control a través de Internet desde teléfono móvil de un proceso de la empresa INPROCESS……….….5
Figura 1.4 Diagrama de bloques del sistema propuesto del monitoreo a través de Internet...6
Figura 1.5 Interfaz del prototipo de Control y Monitoreo de temperatura…………...8
Figura 1.6 Prototipo de Control y Monitoreo de temperatura………...…...8
Figura 1.7 Sistema de monitoreo de procesos industriales por Internet………..…….9
Figura 1.8 Respuesta del controlador en la interfaz de la aplicación gráfica……….……...10
Figura 1.9 Visualización sencilla de las variables del proceso……….…………12
Figura 1.10 Diagrama esquemático del sistema de monitoreo y control……….………..13
Figura 1.11 Tramas de comunicación……….………...14
Figura 1.12 Ingreso a la interfaz gráfica de monitoreo……….……….14
Figura 1.13 Datos almacenados por el sistema……….……….15
Figura 1.14 Interconexión del sistema……….……..16
Figura 1.15 Diagrama de funcionamiento del DABin dentro del proceso……….…...17
Figura 1.16 Topología de la Red DeviceNet™……….………….18
CAPÍTULO 2 MARCO TEÓRICO
Figura 2.1 Modelo CIM definido por National Bureau Of Standards (NBS) de los Estados
Unidos……….………...……….…24
Figura 2.2 Posicionamiento de las redes de información e industriales y equipamiento típico frente al modelo CIM……….………26
Figura 2.3 Jerarquización y Clasificación de sistemas de comunicación según un modelo CIM……….………....28
Figura 2.4 Representación del Modelo OSI……….…………..29
Figura 2.5 Modelo de capas protocolo CIP……….…………...34
CAPÍTULO 3 ARQUITECTURA INTEGRADA DE AUTOMATIZACIÓN Figura 3.1 Topología Bus……….…..………44
Figura 3.2 Topología Estrella……….…………45
Figura 3.3 Topología Anillo……….………..46
Figura 3.4 Niveles de Comunicación……….………47
Figura 3.5 Red DeviceNet™ y los elementos que la conforman……….……..49
Figura 3.6 Componentes del Módulo DeviceNet 1756-DNB/C……….………...50
Figura 3.7 Variador de velocidad PowerFlex 40……….………..51
Figura 3.8 Funciones de entrada y salida de un variador de velocidad para el monitoreo en Factory Talk View……….………53
Figura 3.10 Funciones de entrada y salida del relevador de sobrecarga para el monitoreo en
Factory Talk View……….……….…57
Figura 3.11 Sensor de límite 802DN-WBRN5 A………..……….60
Figura 3.12 Funciones de entrada del sensor final de carrera mecánico de para el monitoreo en Factory Talk View………..……....60
Figura 3.13 Sensor inductivo 871TM-D5ED18-N5……….……..61
Figura 3.14 Funciones de entrada del sensor inductivo para el monitoreo en Factory Talk View……….………...62
Figura 3.15 Sensor infrarrojo Rightsights 42EF-D1LDAK-F5………..……....64
Figura 3.16 Funciones de entrada del sensor fotoeléctricos Rightsights DeviceNet™ para el monitoreo en Factory Talk View……….……...65
Figura 3.17 Estación de botones………..……...67
Figura 3.18 Arquitectura NetLinx……….….68
Figura 3.19 Red ControlNet™……….…..69
Figura 3.20 Módulo Flex I/O……….……….…70
Figura 3.21 Módulo Point I/O……….……...71
Figura 3.22 Topología de la red Ethernet/IP™……….…….72
Figura 3.23 Conexión del módulo 1756-EWEB/A a través del protocolo de comunicación Ethernet/IP™……….…….74
CAPÍTULO 4 PROGRAMACIÓN Y APLICACIÓN
Figura 4.1 Propiedades de la conexión de área local………...…….………….77
Figura 4.2 Asignación de la IP de la computadora……….…....77
Figura 4.3 Network Settings……….…...78
Figura 4.4 Establecimiento de Dirección IP……….……..78
Figura 4.5 Asignacion de nombre del driver……….…….79
Figura 4.6 Selección de la subred local……….…….80
Figura 4.7 Red DeviceNet™……….………….80
Figura 4.8 Red ControlNet™……….………81 Figura 4.9 Red Ethernet/IP™……….………82
Figura 4.10 Red de la integración del sistema……….………...83
Figura 4.11 Pantalla de inicio del programa RSLogix 5000……….……….84
Figura 4.12 Selección del tipo de controlador y asignación del nombre del proyecto……….………….85
Figura 4.13 Creación de un nuevo módulo……….…….…...85
Figura 4.14 Comunicación a través del protocolo ControlNet™ para la red DeviceNet™……….…..87
Figura 4.15 Comunicación a través de los protocolos ControlNet™ y Ethernet/IP™ para la red ControlNet™……….………...89
Figura 4.16 Comunicación a través de Ethernet para la red Ethernet/IP™……….…….91
Figura 4.17Editar tags……….………....92
Figura 4.18 Nuevo tag……….……...92
Figura 4.21 Instrucción BTD……….………94
Figura 4.22 Tag tipo productor……….……….95
Figura 4.23 Tag tipo consumidor……….………..96
Figura 4.24 Conexión del tag tipo consumidor……….………96
Figura 4.25 Configuración de la red……….……….97
Figura 4.26 Selección del escáner DeviceNet……….………...97
Figura 4.27 Nodos de la red DeviceNet™……….……….98
Figura 4.28 Tags de los nodos de la red DeviceNet™……….………..99
Figura 4.29 Selección del módulo ControlNet……….………..99
Figura 4.30 Nodos de la red ControlNet™……….……….100
Figura 4.31 Tags de los nodos de la red ControlNet™……….………...100
Figura 4.32 Diagrama de flujo de la banda transportadora 1……….………..102
Figura 4.33 Diagrama de flujo de la banda transportadora 2……….…...104
Figura 4.34 Diagrama de flujo de la comunicación de la red DeviceNet™………...106
Figura 4.35 Diagrama de flujo de la comunicación de la red ControlNet™……….…..108
Figura 4.36 Diagrama de flujo de la comunicación de la red Ethernet/IP™……….…..110
Figura 4.37 Diagrama de flujo de envío de datos entre diferentes niveles de comunicación……….……...112
Figura 4.38 Diagrama de flujo del HMI para la red DeviceNet™……….…..114
Figura 4.39 Diagrama de flujo del HMI para la red ControlNet™……….…….115
Figura 4.40 Diagrama de flujo del HMI del sistema SCADA……….…116
Figura 4.41 Diagrama de flujo del envío de información al módulo EWEB……….…..119 Figura 4.42 Significado de Colores en el Diseño de un HMI……….…….121
Figura 4.43 Factory Talk View Studio……….………122
Figura 4.44 Pantalla inicial de selección del tipo de aplicación de Factory Talk View Studio……….…….…..122
Figura 4.45 Creación del proyecto en Factory Talk View Studio……….……..123
Figura 4.46 Comunicación con el PAC……….……...124
Figura 4.49 Insertar una pantalla en Factory Talk View……….……….126
Figura 4.50 Botón para insertar imagen en una pantalla……….…….126
Figura 4.51 Botón para navegar entre pantallas……….………..127
Figura 4.52 Propiedades del Goto Display Botton……….…………...128
Figura 4.53 Lista de Control de Selectores……….……….….129
Figura 4.54 Propiedades de animación……….………....129
Figura 4.55 Botón pulsador……….……….130 Figura 4.56 Configuración del Botón Pulsador Momentáneo……….………….…130
Figura 4.57 Configuración de Luz Indicadora……….……...131
Figura 4.58 Configuración de la pantalla numérica……….…………131
Figura 4.59 Mensajes locales……….……….…..132
Figura 4.60 Nuevo mensaje local……….………132
Figura 4.61 Botón de paro y sus propiedades……….……….133
Figura 4.62 Pantalla de Inicio……….……….134
Figura 4.63 Pantalla de la banda transportadora 1……….………..135
Figura 4.64 Pantalla de las características del motor 1……….………...136
Figura 4.65 Pantalla de la gráfica del variador de velocidad de la banda transportadora 1………...………..…….……...137
Figura 4.66 Pantalla de los sensores infrarrojos de la banda transportadora 1………...138
Figura 4.69 Pantalla de la gráfica del variador de velocidad de la banda
transportadora 2……….…….…….………..…...140
Figura 4.70 Pantalla del sensor inductivo y del sensor de límite de la banda transportadora 2………...……….…….…….……….….…141
Figura 4.71 Pantalla del relevador de sobrecarga……….……..……..142
Figura 4.72 Etapas del sistema de producción para bebidas carbonatadas utilizado para el caso de estudio………..……….……..…144
Figura 4.73 Topología del sistema de producción de bebidas carbonatadas……….…...147
Figura 4.74 Pantalla de portada………...……..148
Figura 4.75 Pantalla de Inicio………..….149
Figura 4.76 Pantalla del PAC ControlLogix 5561 de la red DeviceNet™…………...……...150
Figura 4.77 Pantalla de entradas y salidas digitales……….…151
Figura 4.78 Pantalla de entradas digitales……….…………...152
Figura 4.79 Pantalla de entradas digitales de los sensores………...153
Figura 4.80 Pantalla de entradas digitales de los variadores de velocidad………..154
Figura 4.81 Pantalla de entradas digitales del relevador de sobrecarga……….……..155
Figura 4.82 Pantalla de salidas digitales……….…….156
Figura 4.83 Pantalla de salidas digitales de los variadores de velocidad……….……157
Figura 4.84 Pantalla de salidas digitales del relevador de sobrecarga……….…...158
Figura 4.85 Pantalla de entradas y salidas del Point I/O……….….159
Figura 4.87 Pantalla de entradas y salidas analógicas y digitales del Flex I/O………....161
Figura 4.88 Pantalla de Portada……….……...163
Figura 4.89 Pantalla principal del sistema SCADA en el caso de producción de bebidas
carbonatadas……….…………164
Figura 4.90 Pantalla de la etapa de enfriamiento en el sistema SCADA
del caso de producción de bebidas carbonatadas…………..…………..…….…….…….…...165
Figura 4.91 Pantalla de la temperatura de la etapa de enfriado en el
sistema SCADA del caso de producción de bebidas carbonatadas………..….…….…..166
Figura 4.92 Pantalla de la etapa de llenado del sistema SCADA en el caso de
producción de bebidas carbonatadas………...……….…...167
Figura 4.93 Pantalla de la velocidad de la banda transportadora de la etapa de llenado en el
sistema SCADA del caso de producción de bebidas carbonatadas……….….168
Figura 4.94 Pantalla de la etapa de sellado en el sistema SCADA del caso de producción de
bebidas carbonatadas………...……...169
Figura 4.95 Pantalla de la velocidad de la banda transportadora de la etapa de sellado en el
sistema SCADA del caso de producción de bebidas carbonatadas………..170
Figura 4.96 Pantalla de inicio en el navegador utilizando la IP del módulo
1756-EWEB/A………...171
Figura 4.97 Pantalla de inicio módulo EWEB 1756………...……...172
Figura 4.98 Creación de un nuevo dato………....173
Figura 4.99 Datos creados en el módulo EWEB para el caso práctico de aplicación…………..173
Figura 4.100 Vinculación de los datos creados en el módulo EWEB y tags del programa de la red
CAPÍTULO 5 RESULTADOS Y CONCLUSIONES
Figura 5.1 Verificación del Shortcut……….……...…176
Figura 5.2 Resultados en el HMI, en RSLogix a nivel PAC y en elementos físicos de la banda
transportadora uno……….……...…178
Figura 5.3 Resultados en el HMI, en RSLogix a nivel PAC y en elementos físicos de la banda transportadora uno con el sensor infrarrojo 1……….…….…...…..180
Figura 5.4 Resultados en el HMI, en RSLogix a nivel PAC y en elementos físicos de la banda transportadora uno con el sensor infrarrojo 2……….…….….182
Figura 5.5 Resultados en el HMI, en RSLogix a nivel PAC y en elementos físicos de la banda
transportadora dos……….…..….….184
Figura 5.6 Resultados en el HMI, en RSLogix a nivel PAC y en elementos físicos de la banda transportadora dos en el sensor inductivo……….………186
Figura 5.7 Resultados en el HMI, en RSLogix a nivel PAC y en elementos físicos de la banda transportadora dos en el sensor de límite………..188
ÍNDICE DE TABLAS
CAPÍTULO 2 MARCO TEÓRICO
Tabla 2.1 Características del protocolo de comunicación DeviceNet………...………39
Tabla 2.2 Características del protocolo de comunicación ControlNet™……...………...42
Tabla 2.3 Características del protocolo de comunicación Ethernet/IP™………...…...44
CAPÍTULO 3 ARQUITECTURA INTEGRADA DE AUTOMATIZACIÓN Tabla 3.1 Nodos de la red DeviceNet™………...……….50
Tabla 3.2 Características del variador de velocidad Power Flex 4………...….53
Tabla 3.3 Características del variador de velocidad Power Flex 40………..…...54
Tabla 3.4 Parámetros de entrada del variador de velocidad para monitoreo………..……..56
Tabla 3.5 Parámetros de salida del variador de velocidad para monitoreo………...……....57
Tabla 3.6 Parámetros de entrada del relevador de sobrecarga para monitoreo……….60
Tabla 3.7 Parámetros de entrada del relevador de sobrecarga para monitoreo……….61
Tabla 3.8 Parámetros del sensor de límite para monitoreo………...63
Tabla 3.9 Parámetros del sensor inductivo para monitoreo………..65
Tabla 3.10 Parámetros de entrada de los sensores infrarrojos para monitoreo…………...68
Tabla 3.11 Parámetros de salida de los sensores infrarrojos para monitoreo………...68
CAPÍTULO 4 PROGRAMACIÓN Y APLICACIÓN
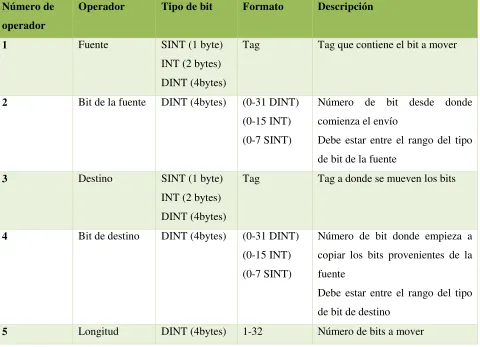
Tabla 4.1 Operadores de la instrucción BTD………96
Tabla 4.2 Tareas de una HMI………..122
CAPÍTULO 5 RESULTADOS Y CONCLUSIONES Tabla 5.1 Coeficientes para el método COCOMO………...193
Tabla 5.2 Costo del desarrollo de software……….196
Tabla 5.3 Costos de los componentes físicos y licencias de software………197
INTRODUCCIÓN
El sector industrial está en un proceso continuo de la búsqueda de mejoras en la producción, empleando para ello tecnología y equipos que puedan cumplir con los requisitos y estándares propuestos por la sociedad. Por esta razón han aparecido nuevas tecnologías y técnicas que han revolucionado a las industrias competentes, obligando de esta manera a los productores ir un paso adelante de la competencia obteniendo así productos con mayor calidad en tiempos muy reducidos y con un costo bajo.
A pesar de que esta innovación tecnológica le compete a todos los sectores industriales, también resulta importante para instituciones educativas, que promueven la investigación haciendo uso de todos los recursos posibles para que la preparación de los alumnos sea completa de forma que se tenga un amplio conocimiento acerca de nuevas tecnologías y equipos con los que se interactúa en la industria.
Por esta razón la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) Unidad Zacatenco, específicamente el departamento de Ingeniería en Control y Automatización, en su laboratorio de Comunicaciones Industriales cuenta con un sistema de dos bandas transportadoras, las cuales operan mediante un conjunto de sensores. El sistema se encuentra gobernado por un controlador de la serie ControlLogix, haciendo uso de este controlador el sistema opera de forma autónoma.
GLOSARIO
ControlLogix: Familia de controladores de la marca Allen Bradley.
Comunicación: Proceso de transmisión de información de un emisor a un receptor través de un medio.
Controlador: Dispositivo que se emplea para el gobierno de uno o más procesos.
Ethernet/IP: Protocolo de red en niveles para aplicaciones de automatización.
FactoryTalk View: Software de programación de la marca Allen Bradley para terminal gráfica HMI.
HMI: Human Machine Interface (Interfaz Humano – Máquina).
Interfaz: Elemento físico o de programa que permite el acoplamiento de dos sistemas distintos o dos partes distintas de un mismo sistema, con propósito de intercambiar información.
Manufactura: Transformación de las materias primas en un producto totalmente terminado.
RSLinx: Software que permite configurar el enlace a través de los puertos de comunicación del PLC a los dispositivos de entrada y salida.
RSLogix 5000: Software de programación para PLC modulares de la marca Allen Bradley.
Tag: Etiquete creada en el software RSLogix 5000 para direccionar instrucciones.
PAC: Controlador de Automatización Programable.
VCD: Voltaje de corriente directa
XML: Lenguaje de marcas extensible. Es utilizado para almacenar datos en forma legible.
CPU: Unidad Central de Procesamiento.
OBJETIVO GENERAL
Gestionar y monitorear la información referente a los estados de los dispositivos que integran un proceso de manufactura tomando como objeto de estudio un sistema de dos bandas transportadoras gobernado por un controlador para informar sobre el funcionamiento del sistema mediante la implementación de una topología de red para la integración de cada nivel de comunicación utilizando las redes industriales DeviceNet™,
ControlNet™ y Ethernet/IP™ para que en todo momento los usuarios del sistema estén informados de lo que está sucediendo en el proceso.
OBJETIVOS ESPECÍFICOS
Plantear una topología para cada red industrial, DeviceNet™, ControlNet™ y Ethernet/IP™, que cumpla con los requerimientos de los dispositivos involucrados en cada nivel.
Establecer un intercambio de información entre servidor y clientes utilizando el protocolo TCP/IP (Transmission Control Protocol/Internet Protocol).
Crear diferentes interfaces para cada uno de los niveles de comunicación que permita monitorear un proceso.
Diseñar e implementar una interfaz visual para el usuario final, considerando la interactividad, flexibilidad, escalabilidad y portabilidad del mismo.
PLANTEAMIENTO DEL PROBLEMA
En un proceso es necesario conocer en todo momento lo que está ocurriendo en cada una de sus etapas, los operadores deben estar informados de lo que está sucediendo, el desgaste de los dispositivos, los paros programados o inesperados, entre otros datos relevantes.
Para la automatización de una sistema de dos bandas transportadoras se requiere monitorear y gestionar la información obtenida de las entradas y salidas de los dispositivos (sensores, actuadores, elementos finales de control, etc.) así como de los controladores involucrados en el proceso; esto con el fin de proveer al usuario información desde un cualquier punto de una red a través de Ethernet.
Para realizar el monitoreo en cada uno de los diferentes niveles de comunicación es necesario una Interfaz Humano-Máquina (HMI) para tener una visualización desde nivel máquina y dispositivos hasta un nivel de supervisión.
Debido a las demandas de innovación es necesario un sistema, que sea capaz de comunicarse con el PLC que maneja el proceso en la planta y éste a su vez entregar información del proceso como variables involucradas, tiempos, desconexiones, fallas, estado de los equipos; el conocimiento de esta información desde cualquier punto de la red a través Ethernet estableciendo el intercambio de datos en una red LAN marcando la diferencia en la planificación de la producción y la gestión de una industria permitiendo obtener información real del proceso en línea.
A fin de monitorear y gestionar la información de un proceso se propone maximizar el rendimiento del proceso, manejar la información para poder realizar programas de mantenimiento preventivos, conocer el estado del proceso y obtener señales de alerta.
JUSTIFICACIÓN
Conforme la tecnología se ha desarrollado, las necesidades del sector industrial han ido evolucionando exigiendo mayor calidad en la producción, disminución de errores, gestión de datos y un análisis de la información que se maneja a cada momento dentro de un proceso. Por ello surge la necesidad de que la automatización de un sistema represente beneficios a nivel empresa y que cumpla con los requisitos del usuario utilizando protocolos que ayuden a comunicar todos los niveles del proceso y no solo se realice por etapas, sino que exista una integración de la información y se obtenga como resultado una interfaz que permita el monitoreo de las variables de interés en el funcionamiento del sistema, tales como velocidades de operación, estados de sensores, actuadores, etc, con el propósito de realizar planeaciones de mantenimiento, producción y adquisición de datos para análisis históricos, control de calidad y cálculo de costos al nivel de empresa del modelo CIM.
La realización del sistema de monitoreo y gestión de la información de este proyecto brinda varios beneficios, tales como:
El manejo y visualización a larga distancia por múltiples usuarios.
Usuarios personalizados para el monitoreo, análisis, servicio y diagnóstico del proceso. Mínimos costos de mantenimiento debido a la administración central del software.
El uso de Ethernet ha sido fundamental para establecer comunicación dentro de los procesos ya que es una herramienta de fácil navegación y configuración, la cual permite obtener el flujo de datos de una forma más rápida.
Capítulo 1
Introducción y Estado
del arte
1.1.
Estado del arte
En el presente apartado, se describe la teoría e información relevante que fijará las bases para la fundamentación del proyecto. Se abordan temas relacionados con el monitoreo de un proceso utilizando diferentes tecnologías, cada uno de los trabajos descritos reafirma la relevancia de implementar un sistema de monitoreo y gestión de información para cualquier tipo de proyecto.
1.1.1. Revisión sobre el monitoreo y control de procesos a través de teléfono móvil
Monitoreo remoto de procesos a través del canal de voz de teléfonos celulares GSM
En la Universidad Peruana de Ciencias Aplicadas (UPC) [1] se desarrolló una implementación en un sistema de monitoreo remoto de procesos, el cual se basa en la utilización del canal de voz de los teléfonos celulares GSM. [1]
Realizaron una investigación en el consumo de energía eléctrica por parte de usuarios primarios. El sistema es conformado por dos secciones principales: El sistema central de monitoreo (SCM) se encarga de realizar peticiones y recibir la información enviada por los Sistemas de Transmisión de Información Remota (STIR’s). Para esto, el SCM es administrado por una aplicación realizada en Borland C++ Builder 6.0 y realiza funciones como el control y comunicación con un teléfono celular GSM principal, vía interfaz USB 2.0; recepción y demodulación de las señales transmitidas, vía la tarjeta de sonido de una computadora personal, y la interpretación de la información decodificada en tiempo real.
Figura 1.1 Diagrama General del sistema de transmisión de información remota. [1]
Supervisión y monitoreo de procesos utilizando mensajes de texto desde teléfonos celulares
En la Universidad Nacional Mayor de San Marcos [2] se realizó un proyecto de tesis, el cual tiene como objetivo convertir al teléfono celular en un periférico de la computadora, la cual adquiere la capacidad de procesar datos que son enviados a grandes distancias vía mensajes de textos desde teléfonos celulares, potenciando las aplicaciones de ambos dispositivos.
tarjeta que comunica el puerto paralelo de la computadora con los sensores y actuadores de los procesos seleccionados.
Para el envío de información se empleó como proceso el módulo del laboratorio que mezcla líquidos de dos recipientes, el objetivo del experimento consistió en que se generará un mensaje de texto al usuario cuando los niveles de los líquidos estaban fuera de un umbral especificado y a su vez remotamente el usuario podía activar o desactivar las válvulas de flujo de los recipientes. Para interactuar con el proceso se diseñó una tarjeta de Entrada/ Salida constituida básicamente por relés, cada relé conectada a una válvula o sensor estaba mapeada y configurada por el programa.
[image:28.612.106.509.336.583.2]El esquema de la implementación se muestra en la figura 1.2 en donde también se observa el empleo de una ventana denominada Interfaz Gráfica Monitor Supervisor, de uso exclusivo para el administrador del programa.
HMI/ Monitoreo y control desde teléfono móvil basado en Android
En la empresa INDUSTRIAL PROCESS S.R.L. [3] presenta este artículo de un proyecto que desarrollaron para una necesidad interna de la misma empresa. Explican la necesidad de monitoreo y control de sus procesos a través de Internet (WAN) o la Intranet de su empresa (LAN) sin la necesidad de cambios en el proyecto programado. Publicaron que se realizaría mediante el uso de un servidor Web (Panel Studio). Esto significa que el servidor Web ofrece la misma pantalla de archivo que contiene el HMI (Interfaz Hombre-Máquina) y también las imágenes de proceso que se muestran pueden contener scripts para las secuencias dinámicas y ser monitoreado en línea.
La comunicación entre el dispositivo móvil y el proceso se realiza a través de un Servidor Web (Panel Studio), el cual se encarga de enviar los datos que aparecen en la HMI permitiendo la visualización como se muestra en la figura 1.3, de un informe detallado de los acontecimientos en el proceso.
1.1.2. Revisión sobre el monitoreo y control de procesos a través de Internet
Sistema electrónico de monitoreo y mando vía web a través de Internet
En el año 2007 fue presentado el trabajo de “Sistema electrónico de monitoreo y mando vía web a través de internet” [4] se propuso que debido a la necesidad de control de procesos, que es creciente en el mundo moderno y que requiere no sólo de circuitos que se auto gobiernen, siendo necesario o indispensable en ciertas operaciones la supervisión y mando manual. Si ese personal, gerencial, operativo o de mantenimiento, que en muchas ocasiones puede ser altamente calificado, tiene que estar físicamente en el lugar del proceso, se subutiliza su potencial intelectual y se producen costos de viáticos. En este proyecto se diseña un sistema que utilizando la programación de alto nivel provista por la plataforma .NET de Microsoft, permite la comunicación entre la Web y un microcontrolador que finalmente es flexible de ser adaptado a cualquier sistema eléctrico o electrónico, de baja, media o alta potencia. La descripción del proceso se observa en la figura 1.4.
Se realiza el muestreo electrónico de magnitudes eléctricas mediante un sensor o transductor en este caso de la intensidad de la corriente, con un transformador de corriente. Es acondicionada la información obtenida, entre lo que incluye la digitalización y transportada a un computador utilizando transmisión asíncrona, mediante el protocolo RS232. En el computador existe un software local, también llamado software de escritorio. Su objetivo es ser el encargado de adquirir los datos que ingresan al puerto serie para almacenarlos en una base de datos.
Para completar la cadena, en este computador estación central, se cuenta con un servidor de páginas Web(IIS), el cual tiene como función servir una Web dinámica para que usuarios remotos la puedan visualizar y manejar a través de Internet, encontrándose estos en otros computadores llamados PC clientes. Otro papel importante del servidor fue ejecutar el código de lado servidor con el que se construye la Web dinámica, en este caso ASP.NET, para que pueda ser visto por el usuario del PC cliente en forma de código HTML.
Finalmente la variable proveniente del transductor quedará plasmada de forma automática en la página Web, creada y servida a Internet, la cual tomará su información de la base de datos anteriormente mencionada.
Control y Monitoreo de Temperatura a través de Internet
En Agosto de 2008 presentaron una tesis llamada “Control y Monitoreo de Temperatura a través
Figura 1.5 Interfaz del prototipo de Control y Monitoreo de temperatura. [5]
Monitoreo de procesos industriales por Internet.
En el Centro de Investigación y Desarrollo en Telecomunicaciones en el área de Electrónica e Informática (CITEI) se desarrolló un sistema que cuenta con una computadora encontrada en la planta industrial, y una serie de computadoras que se conectan con ésta a través de Internet [6].
Para realizar el intercambio de información entre servidor y clientes se utilizó TCP/IP (Transmission Control Protocol/ Internet Protocol). El sistema funciona cuando se conecta al servidor utilizando la dirección IP del mismo (del tipo www.xxx.yyy.zzz) y un nombre de identificación de cliente de acuerdo al esquema mostrado en la figura 1.7.
Figura 1.7 Sistema de monitoreo de procesos industriales por Internet. [6]
esperando que un cliente trate de conectarse. Cuando esto ocurre, establece el vínculo con el mismo y le envía la información cuando éste la solicita.
Sistema basado en PLC para control, monitoreo y almacenamiento de datos de temperatura de un colector solar paraboloide compuesto
En Diciembre del 2005 se realizó un trabajo de tesis en la Facultad de Ingeniería de la Universidad de Antioquia el cual consistió en el diseño, implementación y resultados de un sistema de control, monitoreo y almacenamiento de datos de temperatura de un colector solar paraboloide compuesto. [7]
Para lograrlo la temperatura es sensada por el tubo receptor del colector en puntos distintos con termopares tipo J. La CPU del PLC calcula la temperatura que sensa cada termopar y ejecuta un algoritmo de control que mantiene la temperatura de fluido, a la salida del colector, en un valor de setpoint configurable mediante un teclado matricial y una pantalla de cristal líquido. El control se logra variando, por medio de una electroválvula, el caudal del fluido, compensando de esta forma las perturbaciones de la planta. Adicionalmente se implementó un módulo basado en un microcontrolador MCHC908GP32 de Freescale que permite almacenar datos de temperatura en una memoria Flash EEPROM que permite almacenar datos de temperatura, los cuales son descargados a un PC por medio de una aplicación gráfica como se observa en la figura 1.8.
Se logró que dispositivos como el PLC Fanuc y un microcontrolador pudieran comunicarse entre sí. Esto permitió que los datos de temperatura obtenidos por el PLC fueran almacenados en una memoria y visualizados en una pantalla de cristal líquido. Además, gracias a esta comunicación, es posible que el usuario ajuste en cualquier momento el intervalo de tiempo en que el PLC envía datos al microcontrolador y los parámetros de control (Setpoint, periodo de control).
Se cumplió con los requerimientos de almacenamiento y visualización de datos utilizando dispositivos de bajo costo como un microcontrolador, una memoria EEPROM y un display de cristal líquido. Gracias a esta solución no fue necesario utilizar software SCADA y no se requiere de un computador continuamente conectado al PLC.
1.1.3. Revisión sobre el monitoreo y control de procesos industriales basada en el
estándar de comunicaciones OPC
En la facultad de Ingeniería en Valencia, Venezuela, [8] se desarrolló una aplicación de software tipo cliente capaz de realizar actividades de monitoreo y control de procesos industriales
empleando el protocolo de comunicación “OLE para control de procesos”, OPC.
Se utilizó el lenguaje C# y la metodología Extreme Programming (XP). El software permite al usuario, interactuar con datos que pueden provenir de un proceso real o de una simulación, a través de algoritmos de control personalizados realizados en un lenguaje de fácil manejo (VBScript y JavaScript), y adicionalmente genera un registro histórico de variables OPC que puede ser recuperado en cualquier momento. Al fundamentarse en el estándar OPC, es posible agregar dispositivos de diferentes fabricantes a medida que estos son adquiridos e incorporados al proceso. El programa puede ser utilizado en aplicaciones de automatización de procesos e instrumentación virtual. La operación del sistema fue verificada de forma local y remota por medio de una red LAN. La aplicación desarrollada presenta interfaces amigables y una arquitectura abierta, capaz de crecer o adaptarse según las necesidades cambiantes de la empresa o instalación industrial.
requerimientos para realizar una programación de calidad, estableciendo una relación eficaz de trabajo en equipo y evaluación constante del funcionamiento óptimo del producto. Por otra parte, se incorporó el uso de diagramas UML (Lenguaje Unificado de Modelado) para documentar el funcionamiento y las características que la aplicación presentará al usuario. Específicamente, fueron utilizados diagramas de Casos de Uso, ya que estos representan al sistema desde el punto de vista del usuario, es decir, describen un uso del sistema y cómo interactúa con el usuario.
Para verificar la operatividad de la aplicación y la correcta adquisición de datos provenientes de un servidor local en tiempo real, se elaboró el diseño de la pantalla mostrada en la figura 1.9.
1.1.4. Revisión sobre el monitoreo y control remoto con acceso inalámbrico
bidireccional a procesos industriales
En el año 2011 se publicó un artículo en la Revista Colombiana de Tecnologías Avanzadas [9], donde presentan un sistema que permite realizar el monitoreo y control de procesos industriales, empezando por la adecuación de sensores y actuadores, pasando por una etapa de adquisición de datos y realizando un procesamiento digital que permite implementar una comunicación bidireccional inalámbrica, que comunica el proceso con una estación remota, en la cual se adhiere un dispositivo servidor serial que convierte los datos al protocolo Ethernet/IP™ permitiendo que el proceso pueda ser montado sobre cualquier red de datos, y monitorear y ejercer acciones básicas de control por medio de una interfaz gráfica implementada en el software LabView™. Este sistema es de gran aplicabilidad ya que permite la escalabilidad y adaptación a cualquier tipo de necesidad en diversos entornos como el industrial, agrícola, medioambiental, entre otros. El Sistema de Monitoreo y Control Remoto con Acceso Inalámbrico Bidireccional a Procesos Industriales se desarrolla de acuerdo con el diagrama esquemático de la Figura 1.10.
Para realizar la etapa de comunicación inalámbrica bidireccional es necesario emplear dos tramas, una de supervisión, a través de la cual se enviarán las instrucciones u órdenes al proceso, y otra trama de control, que es bidireccional, la cual contiene la información obtenida de los sensores. En la figura 1.11 se encuentran las tramas con los campos respectivos, cada uno de 1 byte de longitud, para control y supervisión, respectivamente.
Figura 1.11 Tramas de comunicación. [9]
Para ingresar a la interfaz gráfica se solicita un usuario y una contraseña que serán validados, de esta forma se limita el acceso a la información de los procesos. A cada uno de los parámetros que se desea visualizar, se le adiciona un indicador o visualizador que se ubica en un campo grafico donde el usuario final podrá ver el comportamiento de las variables industriales y los datos de interés, como se observa en la figura 1.12.
Figura 1.12 Ingreso a la interfaz gráfica de monitoreo.
analizar y controlar el comportamiento de las variables medidas. En la figura 1.13, se pueden observar los datos almacenados por el sistema.
Figura 1.13 Datos almacenados por el sistema. [9]
1.1.5. Revisión sobre el diseño e implementación de un sistema de control y
monitoreo basado en HMI-PLC para un pozo de agua potable
En la revista “Ingeniería Investigación y Tecnología”, en el año 2014 fue publicado un artículo
[10] que se enfoca al diseño e implementación en un banco de pruebas de un sistema de control y monitoreo de descarga de agua en un pozo de agua potable, utilizando equipo especializado para automatización. Se diseñan las interfaces gráficas de usuario (Graphical User Interface, GUI) para interactuar con el operador. La Interfaz Humano-Máquina se implementó en software propietario y contempla reglas para control y monitoreo de las condiciones del sistema para el operador. La HMI se interconecta con un controlador lógico programable donde se implementan las reglas de protección del proceso en diagrama escalera (Ladder Diagram, LD).
Figura 1.14 Interconexión del sistema. [10]
Las tecnologías que más se utilizan para automatizar procesos continuos que requieren control con PLC, así como de la manipulación y del monitoreo de variables con posible animación en tiempo real a través de HMI, permiten apoyar a los operadores en la interpretación de los procesos y en la detección de fallas y la pronta solución de problemas en el sistema, mediante alarmas programadas; sin embargo, también traen como consecuencia la necesidad y los requerimientos de personal altamente calificado en éstas tecnologías para su aplicación, pero sobre todo, para desarrollar los algoritmos tanto de control y protección como los de aquellos eventos a realizarse en las GUI, las cuales también deben desarrollarse principalmente en similitud con la realidad de los sistemas y procesos a controlar.
1.1.6. Revisión sobre el control y monitoreo en procesos industriales
En Buenos Aires se utilizó el DABin [11], con el cual se monitoreó la planta al mismo tiempo desde cualquier PC conectada a una red Ethernet, a un costo inferior al del sistema SCADA y de dispositivos de comunicación para redes, en el DABin se aloja una página Web diseñada con un editor estándar con gráficos y variables numéricas en función de las necesidades de los usuarios.
memoria interna a una página Web diseñada a medida por el usuario, la cual podrá accederse luego, desde cualquier navegador de Internet.
El sistema cuenta con entradas y salidas digitales como se muestra en la figura 1.15 que controlan diversos dispositivos adicionales de manera dinámica. Esta puede configurarse para que emita mails ante determinados eventos y alarmas previamente establecidas. Esta última característica solo la poseían los sistemas SCADA en los cuales la complejidad y el costo son mayores.
1.1.7. Revisión sobre el
uso de la red industrial DeviceNet™ para la
automatización de un sistema de bandas transportadoras
En el año 2013 se realizó una tesis [12] acerca de la implementación de una red DeviceNet™ para la automatización de un sistema de dos bandas transportadoras, en el cual se implementó este protocolo de comunicación empleando un PAC ControlLogix 5561. Se realizó la conexión de los dispositivos al bus de campo DeviceNet™ y este a su vez al escáner del PAC, el cual se encarga de mantener la comunicación de la red. En la figura 1.16 se muestra la topología implementada para la red DeviceNet™ con los nodos que se encuentran conectados por medio de un bus de campo. Cada uno de los nodos fue implementado físicamente hasta obtener un resultado de una secuencia de las dos bandas, toda la comunicación entre dispositivos fue por la
implementación de la red DeviceNet™ dejando abierta la posibilidad de enviar la información del proceso al CPU del PAC que controla el sistema.
1.1.8. Revisión sobre el control y monitoreo de una potabilizadora de agua por
medio de la red industrial
ControlNet™
En el año 2012 se desarrolló un proyecto de tesis [13] en el cual se propuso el control y
monitoreo de una potabilizadora de agua por medio de una red ControlNet™. En este trabajo se
utilizó dicho protocolo de comunicación para enlazar todas las partes de los niveles de control que gobiernan al proceso. ControlNet™ al ser una red de alta velocidad permite cualquier tipo de topología. La topología básica maneja una línea troncal que utiliza como medio físico un cable coaxial RG-6, como se puede observar en la figura 1.17.
Figura 1.17 Topología de la red ControlNet™. [13]
La red ControlNet™ utiliza el método de comunicación Productor/Consumidor, el cual permite
comunicación Punto a Punto y Multicast.
Punto a Punto: ésta conexión usa un Productor y sólo un Consumidor. Ninguna conexión adicional puede ser agregada.
Multicast: ésta conexión permite a un Productor de datos comunicarse simultáneamente con más de un Consumidor.
1.2.
Análisis del estado actual
Las investigaciones que anteceden a nuestro proyecto se acercan al objetivo real de un control gerencial sin embargo todos tienen limitantes como:
De la telefonía celular los prototipos deben ser implementados en lugares donde el teléfono celular reciba una buena calidad de señal; lugares donde la señal es débil o intermitente, ocasionarán problemas al recibir el mensaje. El proceso de comunicación con la computadora consume mucha energía y produce que la batería se agote rápido; se recomienda emplear el prototipo con el cargador conectado.
A pesar de que DABin brinda un menor costo de implementación ya que no requiere de licencias, cuando una variable entra en alarma es posible enviar emails a cinco destinatarios diferentes. Es decir solo se le puede mandar a 5 personas la información obtenido, esto presenta una desventaja al limitar los usuarios en el monitoreo del sistema.
Los proyectos basados en los estándares de comunicación OPC son una opción viable ya que gracias al protocolo utilizado pueden conectarse dispositivos de diferentes fabricantes, pero su complejidad se encuentra por encima del monitoreo mediante telefonía celular y utilizar DABin.
Actualmente Internet se ha convertido en una herramienta fundamental para el monitoreo y la gestión de información pero es necesario crear un ambiente lo suficientemente amigable y sobre todo sencillo de modificar para que los usuarios no tengan problemas al visualizar situaciones del proceso. Deberá ser un factor muy importante el hecho de que el sistema de monitoreo maneje adecuadamente la información ya que de ahí se derivará la parte de comunicación con el usuario.
1.3.
Alcance
El desarrollo del proyecto se centra en la integración de los niveles de comunicación del modelo CIM, específicamente de los primeros cuatro, actuadores y sensores, control de máquina, control de célula y control de fábrica permitiendo así el envío de información del sistema.
Se estableció una topología para cada red industrial permitiendo la interconexión de los dispositivos para establecer la comunicación que el sistema requiere entre los niveles en los que se trabajó.
Se implementó un sistema de monitoreo utilizando distintas HMI’s las cuales fueron diseñadas para dar información respecto a la seguridad del sistema, estados de dispositivos, alertas, paros programados o inesperados, fallas, etc.
Capítulo 2
Marco Teórico
2.1.
Tipos de sistemas de control
Un aspecto importante relacionado con un sistema de control es el tipo de control que se maneja en los sistemas que la integran. El tipo de sistema que un proceso requiere tiene particular influencia sobre el tipo de control que se ha de seleccionar para la implementación del sistema de control a utilizar. De acuerdo con el tipo de sistema, los tipos de control pueden ser centralizados o distribuido.
2.1.1.
Control centralizado
En este tipo de control todos los equipos se encuentran conectados a un PLC central que controla todo el sistema. El PLC central debe ser un equipo potente para gestionar el tráfico de datos con eficiencia. El fallo de una terminal no afecta el funcionamiento de la red pero si el fallo es en el PLC central, se paraliza todo. [14]
2.1.2.
Control distribuido
En este tipo de control, los equipos pueden ser máquinas sencillas que comparten las cargas de trabajo, los recursos y comunicaciones. El fallo de una terminal no afecta al resto de equipos. El control centralizado se basa en la potencia del equipo, único, y el control distribuido se basa en la distribución de los equipos menos potentes, pero con mucha más capacidad de maniobra pues son más tolerantes a fallos. Por este motivo este tipo de control tiene un nivel de inteligencia mayor que las configuraciones centralizadas.[14]
En el control distribuido existen 5 configuraciones básicas:
2.2.
Modelo CIM
CIM [15] se refiere a la manufactura automatizada, al transporte automatizado de piezas y materiales, usando las tecnologías computarizadas en todas las etapas de producción de un producto, desde el diseño a la fabricación y el control de calidad. El modelo CIM considera la factoría (sistema de manufactura) como un todo, recogiendo la automatización de cada actividad y las relaciona entre sí formando un bloque único. Además, se estructuran las aplicaciones de un modo jerárquico dividiendo las tareas de control en distintos niveles funcionales. Como se muestra en la figura 2.1 un modelo CIM de 5 niveles de la arquitectura de aplicación definido por el National Bureau of Standards (NBS) de los Estados Unidos.
Figura 2.1 Modelo CIM definido por National Bureau Of Standards (NBS) de los Estados Unidos.
En un modelo CIM, cada nivel se caracteriza por llevar a cabo labores específicas, asociada a ello un tipo de información y de procesamiento diferente. De ahí, queda determinada la jerarquía a la cual pertenece una red. Cada red gobierna las funciones del nivel inferior y sirve de interfaz al nivel superior (integración del proceso automatizado). El flujo de la información fluye tanto en sentido horizontal (dentro de su propio nivel) como en sentido vertical (a un nivel superior o inferior).
Nivel de Empresa: En el nivel 5, el nivel superior y en él se realizan funciones de gestión de la empresa. Se establecen las políticas de producción del conjunto de la empresa en función de los recursos y costes del mercado.
Empresa
Control de Fábrica
Control de Célula
Control de máquina
Nivel de Control de Fábrica: Al nivel 4 le corresponden las funciones de planificación de la producción del conjunto de la factoría. También se encuentran los elementos de oficina técnica que mediante herramientas como CAD (Diseño Asistido por Computadora) permiten el diseño de productos y elaboración automática de programas para los elementos de fabricación (ingeniería). También, en este nivel se efectúan funciones de control de materiales y recursos. Se generan órdenes de ejecución hacia el nivel de célula en base a las indicaciones del nivel de factoría. Funciones de elaboración de secuencias de producción, de tareas y coordinación de recursos en la planta.
Nivel de Control de Célula: En el nivel 3 se realizan funciones de coordinación de máquinas y operaciones. En él se sitúa el sistema de control que secuencia y controla una tarea específica. Gestiona los recursos y materiales dentro de la propia célula.
Nivel de Control de Máquina: En el nivel 2 se efectúa el control de operaciones de los dispositivos de fabricación. Se encuentra en este nivel el controlador de cada recurso individual.
Nivel de Sensor y Actuador: Es el nivel inferior de la jerarquía CIM. En este nivel se ubican los dispositivos de campo que interactúan con el proceso tales como sensores y actuadores.
2.3.
Jerarquía de las redes de comunicación según el modelo CIM
Debido a los distintos requerimientos que poseen los niveles del modelo CIM [15], cada red de comunicación está optimizada para operar dentro de un determinado rango en el modelo. Al trabajar fuera del nivel para el cual están diseñadas, disminuye su rendimiento y aumenta la relación costo/prestación.
Tal como se pudo observar en las arquitecturas de comunicación comerciales basadas en el concepto de CIM, a cada nivel le corresponde una red con determinadas propiedades y limitaciones.
De esta forma aparece la jerarquización de las redes de comunicación en la industria. Pueden definirse dos grupos de redes de comunicación en la empresa:
• Redes de Información.
• Redes de Campo.
Las primeras se ubican en la parte alta de la jerarquía CIM y las últimas en la parte baja. En la figura 2.2 se muestra cómo se posicionan los tipos de redes en un modelo CIM.
Figura 2.2 Posicionamiento de las redes de información e industriales y equipamiento típico frente al modelo CIM.
Empresa
Control de Fábrica
Control de Célula
Control de máquina
Sensor y Actuador
R e d e s d e i n fo rmac ió n WAN LAN Redes in d u stri al es Redes basadas en IP
2.3.1.
Redes de Información
Estas redes se encuentran, en un sentido ascendente, en los niveles de célula, factoría y empresa del modelo CIM [15]. Son redes orientadas al transporte de grandes paquetes de datos, que aparecen en forma esporádica (baja carga), y con un amplio ancho de banda para permitir el envío rápido de una gran cantidad de datos. Permiten a los diversos sistemas y archivos el acceso a los datos de la planta, relativos a los costos, calidad, fabricación y desarrollo (ofimática). Por lo general, las redes utilizadas en estos niveles jerárquicos son basadas en tecnología IP. Ejemplos de estas redes son EtherNet, WiFi y WiMax en el nivel de empresa, EtherNet y MAP en el nivel de Factoría. Los dispositivos típicos a conectar por estas redes son Computadores Personales, servidores y MainFrames.
2.3.2.
Redes de Campo
Las redes de campo se ubican, en un sentido ascendente, en los niveles de sensor/actuador, campo y célula dentro del modelo CIM [15]. Son redes utilizadas para conectar distintos procesos de aplicación con el propósito de asegurar la explotación de la instalación (comando, supervisión, mantenimiento y gestión). Provee servicios bajo restricciones temporales están constituidas por protocolos capaces de gestionar estas restricciones garantizando que las restricciones de tiempo serán respetadas con cierta probabilidad. A diferencia de las redes de información, están diseñadas para enfrentar un tráfico formado por un gran número de pequeños paquetes, intercambiados con frecuencia entre un alto número de estaciones que forman la red y que muchas veces trabajan en tiempo real.
Algunos ejemplos de redes de campo son ControlNet™, DeviceNet™, Profibus™ y Foundation Fieldbus™, entre otros.
Figura 2.3 Jerarquización y Clasificación de sistemas de comunicación según un modelo CIM.
De acuerdo con la figura 2.3, los requerimientos de las redes son diferentes de acuerdo al nivel de automatización para el cual opera. Por ejemplo, mientras que los tiempos de transmisión entre un paquete y otro en una red del nivel de empresa, como lo es Ethernet/IP™, puede durar minutos u horas, en el caso de las redes del nivel de sensor/actuador, como AS-I, es del orden de los microsegundos a milisegundos. Asimismo, el volumen de datos transmitidos es muy elevado en las redes del nivel de factoría y empresa, del orden de los Megabytes, mientras que en las redes de más bajo nivel es de unos cuantos bytes e incluso bits.
2.4.
Modelo OSI
El principio del modelo OSI [16] es el de los protocolos de capas. Mientras las capas interactúan
de manera “aparejada” y la interfaz entre la función de una capa y su capa inmediata superior e
inferior no se afecten, no es importante la forma como se lleve a cabo la función de esa capa individual. OSI subdivide la función de comunicación de datos en cierto número de sub
Figura 2.4 Representación del Modelo OSI.
En total se definen siete capas. Cada capa del modelo OSI se puede considerar como un programa o proceso en una máquina que se comunica con el proceso correspondiente en otra máquina. Las leyes que rigen esta conversación para determinada capa constituyen el protocolo de esa capa. Un protocolo contiene los siguientes elementos principales:
Sintaxis: Define el formato de los datos y los niveles eléctricos de las señales.
Semántica: Define la información de control para la coordinación y el manejo de errores. Base de tiempo: Establece la sincronización del receptor y el transmisor para detección
adecuada de los bits. También define el acoplamiento de velocidades y las secuencias de paquetes de datos.
Aplicación Presentación Sesión Transporte Red Enlace Física Aplicación Presentación Sesión Transporte Red Enlace Física
Protocolo de parejas Capa OSI
Comunicación Real
Realmente los datos no se transmiten horizontalmente de máquina a máquina en esta capa, sino que se transfieren verticalmente hacia abajo en la computadora transmisora y verticalmente hacia arriba en la computadora receptora.
2.4.1.
Funciones de capas individuales de OSI
Las funciones de las capas individuales del modelo OSI se definen completamente en los estándares ISO (ISO 7498) y en la serie de recomendaciones X-200 del CCITT en resumen, son las siguientes:
Capa física
Establece y la libera el enlace físico y la transmisión de los datos sobre dicho enlace. Especifica los requerimientos eléctricos, mecánicos y de procedimiento para tal fin. La unidad de transmisión en la capa física es el bit.
Capa de enlace de datos
Asegura la confiabilidad de la transmisión entre nodos adyacentes de los datos considerando un canal ruidoso. Entre las principales funciones específicas que realiza para este fin están:
Organizar los datos en paquetes que recibe de la capa superior en tramas. Agregar redundancia a la trama para la detección de errores.
Regular el tráfico mediante buffer.
Agregar banderas para indicar comienzo y fin de mensajes Proveer métodos de acceso al canal.
Foliar los mensajes que transmite.
En la capa de enlace de datos, la unidad de transmisión es la trama, el protocolo estándar de enlace de datos, especificado en ISO3309, se conoce como control de enlace de datos de alto nivel.
Capa de red
Es responsable del establecimiento de conexiones a través de una red real determinando la combinación apropiada de enlaces individuales que se necesita y controlando el flujo de mensajes entre nodos. Sus funciones específicas son:
Establece rutas de un nodo fuente a un nodo destino para transmitir los paquetes. Direcciona los nodos intermedios en la ruta de los paquetes.
Ensambla los mensajes que recibe de la capa de transporte en paquetes y los desensambla en el otro extremo.
Realiza control de flujo y de error.
Reconoce prioridad en los mensajes y los envía con la prioridad asignada.
Ofrece servicios de interconectividad para enlazar redes por medio de enrutadores.
En esta capa, la unidad de transmisión es el paquete.
Capa de transporte
La capa de transporte suministra a la capa de sesión un servicio de transferencia de mensajes confiables sin dejarle saber los detalles de la operación de las capas de comunicaciones.
Capa de Sesión
Se encarga de iniciar, mantener y terminar la conexión llamada sesión. Las funciones que realiza son las siguientes:
Controla el diálogo entre dispositivos, quién transmite, cuándo, por cuánto tiempo, por enlace semidúplex o dúplex, etc.
Sincronización, reestablece la comunicación si ocurre una ruptura del enlace sin perder datos.
Transmite la información del usuario, capa de presentación en una forma ordenada. Reconocimiento de nombres para verificar la autenticidad del usuario, etc.
Capa de presentación
Se encarga de negociar una técnica para la codificación y puntuación de los datos, así como de cualquier conversión que se necesite entre los formatos de código o arreglo de datos para que la capa de aplicación reciba el tipo que reconoce. Las funciones que realiza esta capa son:
Compresión de datos, para hacer más eficiente el empleo del canal de comunicación. Encriptado de datos, para dar seguridad a la transmisión.
Transformación sintáctica del conjunto de caracteres. Formato de desplegado de datos.
Organización de archivos.
Capa de aplicación
comandos relativos a sus propias aplicaciones. Estos procesos de aplicación son la fuente y el destino de los datos que se intercambian. Esta capa es la más alta de la jerarquía y funciona como el administrador general de la red. La transferencia de archivos y el acceso remoto a archivos son probablemente sus aplicaciones más comunes.
2.5.
Protocolo Industrial Común (CIP)
CIP [14] es una aproximación basada en objetos, orientada a permitir el diseño de dispositivos de control que combina el método de direccionado de red y las reglas de intercambio de mensajes.
Se compone de un paquete de servicios para control, configuración y captación de datos, que proporcionan independencia del medio, perfiles de dispositivos, servicios de control, opciones para el intercambio de datos, encaminamiento, comunicaciones cíclicas y acíclicas, y servicios de Productor/Consumidor.
Las características más destacadas, resultantes de la aplicación del protocolo CIP son:
Diagnóstico remoto: permite que cualquier elemento se pueda configurar, monitorizar y diagnosticar desde cualquier punto de la red corporativa.
Integración de redes: permite la integración de células de fabricación basadas en DeviceNet™ o Ethernet/IP™ en un solo bus sin perjudicar a las transmisiones normales ni a las de seguridad.
Elementos inteligentes: permiten la integración de sensores de tipo inteligente, con posibilidades de programación y diagnóstico.
Normalización: todos los elementos de bajo nivel de una red DeviceNet™ tienen la característica de aparecer ante el usuario como nodos de red, mejorando el dialogo, así como poder interactuar directamente entre ellos sin necesidad de hacer servir un controlador de jerarquía superior.
Compatibilidad: dentro de una misma red entre elementos normales y elementos de seguridad, lo cual permite una mayor flexibilidad.
![Figura 1.1 Diagrama General del sistema de transmisión de información remota. [1]](https://thumb-us.123doks.com/thumbv2/123dok_es/4986209.76424/27.612.69.514.64.315/figura-diagrama-general-sistema-transmision-informacion-remota.webp)
![Figura 1.2 Aplicación prototipo de Telecontrol y envío de alertas. [2]](https://thumb-us.123doks.com/thumbv2/123dok_es/4986209.76424/28.612.106.509.336.583/figura-aplicacion-prototipo-telecontrol-envio-alertas.webp)