UNIDAD: IZTAPALAPA.
DIVISION: CIENCIAS BASICAS E INGENIERIA.
CARRERA: ELECTRONICA.
MATERIA: PROYECTO DE INGENIERIA ELECTRONICA 11.
TITULO: SISTEMA DE RADIOLOCALIZACION DE PERSONAS
(PAGING).
FECHA: SEP/1999.
ALUMNO: MANUEL ORTEGA FARFAN.
MATRICULA: 90325943.
SISTEMA DE RADIOLOCALIZACION DE
PERSONAS (PAGING).
PROYECTO DE INGENIERIA ELECTRONICA
II
ALUMNO: MANUEL ORTEGA FARFAN
MATRICULA:
90325943
PROFESOR: FAUSTO CASCO
Contenido
1. Introducción.
2. Mercados.
3. Asignación de frecuencias.
4. Tipos de receptores de localizador.
5. Paging On-Site.
6. Paging Area Amplia.
7. Diseño del receptor del localizador.
8. Area privada de localización.
9. Sistemas Pan - Europeo.
10. Localización indirecta por satélite.
1 1. Ejemplo.
12. Bibliografia.
2
2
3
6
10
15
22
32
34
39
40
l . Introducción.
La Radiolocalización es una efectiva solución para la ubicación de empleados, poner
en alerta al personal y una manera de transmisión de mensajes o datos. Comparado con la
radio móvil de tierra, un radio celular, los radiolocalizadores o bipers como son conocidos
en hospitales, son más pequeños y baratos. Estos también son menos caros que los
microteléfonos CT o DECT y no están limitados en rango como están otros sistemas. Con
dos notables excepciones en los sistemas, esto es, la comunicación es sólo de una manera y
sin reconocimiento. Cada llamada tiene su propia dirección y cuando el radio localizador
llama envía una transmisión codificada que alerta por medio de sonidos por medio de un
tono audible, una luz o una vibración.
Los sistemas de paging (radiolocalización) caen en dos clases, los llamados de Area
Amplia (AA) y los On-Site (OS).
Los usuarios de Area Amplia rentan una recepción con un proveedor de servicio público,
mientras que los usuarios On-Site compran su propio sistema de transmisión privada y
sus radiolocalizadores (pagers).
2. Mercados.
En Europa la industria tiene desarrollado un sistema simple OS, el primero de estos
es un sistema de lazo inductivo instalado en el Hospital. Santo Thomas, por Multitone
Electronics en 1956. Las transmisiones heron en el rango de 30kHz. a 50 kHz. y cada
receptor fue adecuado a su propia y única frecuencia individual. Muchos de estos sistemas
todavía están en uso, pero el costo de instalación del lazo de cable tendido esta prohibido.
Los sistemas de
A A
a nivel nacional en Europa fueron iniciados por los Holandesesen 1964, posteriormente fueron proporcionados a miembros públicos por medio de
del Norte el concepto de subscripción local privada en sistemas de AA, fue desarrollado
recién en los años de 1970’s y por 1988 hubo más de 600 unidades de radio común y 40
compañías telefónicas suministrando servicio a 1.5 millones de subscriptores.
3. Asignación de frecuencias.
Las frecuencias para OS y
A A
de localización varían de ciudad en ciudad. Losiguiente no es exhaustivo, pero es indicativo para los ingenieros en diseño.
3.1. UK
ON-SITE
26.2375MHz. a26.8665MHz.
26.978MHz. a 27.262MHz.; 3 1.725MHz.; 3 1.775MHz. (localización especial)
49.0MHz. a49.4875MHz.
49.425MHz.; 49.4375MHz.; 49.45MHz. a 49.4625MHz.; 49.475MHz.(habla permitido)
16 1 .OOMHz. a 161.1 OMHz. retorno de habla (licencia solo para emergencidespecial)
459.125MHz. a 459.45MHz. y 495.475MHz. (compartido con sistemas de comunicación
local).
161.0MHz. a 161.10MHz y 161.1125MHz. retorno de habla. (compartido con sistemas de
comunicación local).
Area Amplia.
VHF
Los sistemas nacionales y públicos existen en frecuencias de 138 MHz. a 141 MHz. y 153
MHz. A 153.5 MHz. Los planes de áreas amplias privadas son asignadas ‘a fabricas’
preferentemente a frecuencias en la banda de 153MHz. Adicionalmente, los sistemas
ERMES ocupan la banda de 169.425MHz. a 169.80MHz. sistemas ‘superpuestos’ y de
emergencia son posibles en conjunción con sistemas de radio móvil, el cual cubre la banda
de 138MHz. A 174MHz.
UHF
Los planes de áreas amplias son concentradas en la banda de 454.0125MHz. a
466.075MHz. otra vez es posible tener sistemas superpuestos en bandas móvil de 450MHz.
a 470Mhz.
3.2.ALEMANIA
ON-SITE
27.5 1MHz.; 40.76MHz. y 40.68MHz. 20.68MHz. 20MHz. 20kHz. Canales espaciados.
40.665MHz. a 40.695MHz. 1OkHz. Canales espaciados.
468.35MHz.;468.375MHz.; 468.4 MHz a469.150MHz.
Hablado 151.07MHz.; 160.49MHz. a 160.55MHz; 170.55MHz a 170.79MHz.
Area Amplia
Plan Cityruf de 465.97MHz; 466.070MHz; 466.23MHz.
Areas amplias privadas, banda de frecuencia propuesta 440MHz. A 55OMHz.; 12.5kHz.
3.3. FRANCIA
ON-SITE
26.635MHz.;26.695MHz.; 26.745MHz.
446.475MHz. a446.525MHz.
Hablado 152.0125MHz y 445.5OMHz.
Todas las frecuencias en canal angosto (10/12.5kHz.)
Area amplia
3 1.30 MHz.
Pan - European 466.075 MHz. Otros planes de servicios de superposiciódemergencia están
operando a través de todas las bandas móviles.
3.4.HOLANDA
ON-SITE
26.5, 26.6, 26.7, 26.8, 26.9MHz. (sistemas de baja potencia)
26.15MHz. a 27.85MHz. (excluyendo las frecuencias superiores).
39MHz a 40MHz.
Hablado 156MHz. a 174MHz.
Area amplia
Plan Semafon PTT 154.9875MHz y 164.35MHz (Benelux). Servicios de emergencia etc. A
través de bandas móviles.
3.5. ITALIA
ON-SITE
26.20 MHz.;26.35MHz.y26.5OMHz.
459.65MHz. y 469.65MHz.
Hablado 161MHz. a 161.1OMHz.
Area amplia
Una propuesta fue iniciada para un plan PTT en 161.175 MHz., pero esto ha sido adelantado por Plan pan - European en u.h.f.
3.6.BELGICA
ON-SITE
Frecuencias centradas en 26MHz y 40 MHz.; y entre 440MHz. a 470MHz.
Area amplia
Plan Semafón PTT 147.25MHz (nacional) y 164.35MHz (Benelux).
Planes de emergencia y superposiciones en frecuencias móviles.
3.7.DINAMARCA
ON-SITE
29MHz y 3 1.42 MHz.; h.f.
445.9 MHz. a 445.975MHz. u.h.f.
hablado a frecuencias de 146MHz, 161 MHz. y 422MHz.
Area amplia
Sistema púlico (OPS) 469.5MHz. y 469.95MHz.
3.8. SUECIA
ON-SITE
169.425MHz a 170.0375MHz.;servicio regional de radiolocalizador.(minillamadas).
Superposición y servicio de emergencia etc. En las bandas de PMR a v.h.f. y u.h.f.
13 8MHz. a 174MHz. y 4 1 OMHz. a 470MHz.
El método de asignación de frecuencias en estos países es de acuerdo a la categoría de
usuarios, propiamente a cualquiera de las bandas de frecuencias específicas. Para cubrir
ambos países, los fabricantes de radio localizadores han facilitado de 27MHz. a 5OMHz.
h.f.
; 138MHz. a 174Mhz. v.h.f.; 445MHz. a 470MHz. u.h.f.. 900MHz. es también popularen estos países. Ninguna de estas bandas están en las categorías de OS o AA. La frecuencia
de 93 1MHz. es utilizado para radio localizadores por vía satélite.
Las frecuencias más comunes para radiolocalización AA son:
BANDA FRECUENCIA
Banda alta de VHF 138
-
174 MHz Rango inferior de UHF 406 -420 MHz Rango medio de UHF 435 - 480 MHz Rango superior de 495 -512 MHz UHFBanda de 900 MHz 929 - 932 MHz
4. Tipos de receptores de radiolocalizador (Pager)
Un radiolocalizador es obviamente un dispositivo de comunicaciones personales. Los
radiolocalizadores se clasifican con base en la forma como se comunican:
ÚNICAMENTE TONO
Primero que nada el radiolocalizador de "Únicamente Tono" no es sólo un dispositivo de
tonos. Este es el nombre común que se utiliza en la industria. El radiolocalizador no hace
más que solo generar un tono.
Tipo de Radiolocalizador
Únicamente Tono
Función
Sonido - Tono
Modo de Comunicación
Audible 1
Audible 2 '
(4 tonos diferentes)
Audible 4
Luz intermitente Visual
Vibración Mecúnica (se siente)
Por lo que hay 6 formas en las que el radiolocalizador de 'lúnicamente Tono" se puede
comunicar con Usted: 4 tonos diferentes, una luz y una vibración.
TONO Y VOZ
La radiolocalización con voz es todavía popular en algunas partes del mundo. No ha sido
adoptada en áreas donde la radiolocalización tiene gran uso debido al número limitado de
subscriptores que se pueden acomodar en un canal de radio. Un sistema de
radiolocalización a gran escala con múltiples transmisores no sería económicamente
factible con radiolocalizadores de voz. El costo de transmisores múltiples ocasiona que el
precio para los subscriptores sea tan elevado que es dificil pagar este servicio.
Tipo de Radiolocalizador Función Modo de Comunicación
Tono y Voz Sonido - Tono Audible
Luz intermitente Visual
Vibración Mecúnica (se siente)
Mensaje de voz Audible
Ventajas: La bocina puede identificarse positivamente.
La voz indica emoción. (urgencia, sinceridad, etc.)
Desventajas: A no ser que se utilice un radiolocalizador de Voz Almacenada, el mensaje se
escucha y se pierde. Información tal como números telefónicos se deben escribir.
La capacidad del canal está muy limitada.
Cualquiera cerca del radiolocalizador escuchará el mensaje.
El radio localizador numérico tiene un display de 12 a 24 dígitos en consecuencia
disponiendo el llamador para enviar un número telefónico. Por lo anterior el número
enviado puede representar un mensaje. El radio localizador usualmente esta capacitado
para almacenar estos mensajes numéricos en una memoria.
A los radiolocalizadores numéricos algunas veces el público en general les llama "beepers
digitales". Este es un nombre incorrecto ya que existen dispositivos como los
radiolocalizadores con despliegue numérico analógico, y un radiolocalizador generalmente
no es analógico y digital a la vez. Así que llamemosles por su nombre correcto:
Radiolocalizadores con despliegue Numérico.
Este es, hasta ahora, el radiolocalizador más usado en el mundo. El "contenido de
información" del mensaje es bastante completo (más que un tono), y la capacidad del canal
es mucho mayor que en el caso de mensajes de voz. Los propietarios del sistema en muchas
partes del mundo ofrecen este tipo de radiolocalizador y ha tenido una amplia aceptación
por parte del público. Dado que muchos radiolocalizadores pueden operar en un canal de
radio, y casi todos los sistemas numéricos están totalmente automatizados (sin operadores),
el costo de su utilización es muy bajo. En otras palabras, el costo es bajo debido a que el
número de personal requerido para operar el sistema es pequeño.
Sin embargo, existen dos consideraciones técnicas importantes que hacen de la
radiolocalización con despliegue numérico inusual o no factible en muchas partes del mundo. Estas son: 1) el extendido uso de teléfonos Touch-ToneTM o DTMF y 2) las
facilidades para interconexión directa a la red telefónica local. Si la ciudad no tiene un
penetración muy alta de teléfonos de tono y la compañía telefónica no puede o no quiere
proporcionar la interconexión directa a la terminal de radiolocalización, los
radiolocalizadores con despliegue numérico no son una buena idea.
Cualquiera que analice la problemática y el costo de proporcionar operadores para procesar
el tráfico de la radiolocalización numérica, se dará fácilmente cuenta que este tipo de
radiolocalización no es el adecuado, y se decida a cambiar a la radiolocalización con
Tipo de Radiolocalizador Función Modo de Comunicación
Despliegue numérico Sonido - Tono Audible
Luz intermitente Visual
Vibración Mecánica (se siente)
Despliegue de números Mensaje pava leer
Ventajas:
Desventajas:
El costo del radiolocalizador es relativamente bajo.
La señalización es rápida, por lo que la capacidad del canal es grande.
Teléfonos troncales D.I.D. (Interconexión de la compañía telefónica) y Touch-
ToneTM deben estar disponibles para realizar o hacer eficiente este tipo de
radiolocalización.
DESPLIEGUE ALFANUMÉFUCO
El radio localizador alfanumérico tiene un display de 16, 32, o 80 caracteres. Entre 500 a
5000 caracteres de mensaje que pueden ser almacenados en la memoria y pueden ser leídos
al azar.
Con frecuencia se ha dicho que "lo bueno es el enemigo de lo mejor". Esto puede ser cierto
cuando se compara la radiolocalización con despliegue numérico con la radiolocalización
con despliegue alfanumérico. Un despliegue numérico solamente muestra un número
telefónico. Si el subscriptor no reconoce el número, no sabrá quien le está llamando, que
asunto puede ser o si es o no urgente. Por ejemplo, es muy errático recibir un mensaje
numérico, salir de la vía rápida, estacionarse, encontrar un teléfono, obtener las monedas
necesarias y realizar la llamada, sólo para darse cuenta que el mensaje no era importante.
Un mensaje alfanumérico enviado apropiadamente le dice al subscriptor: quién llamó, por
requiere contestar una llamada con un radiolocalizador alfanumérico. Esta sola
característica puede ahorrarle al subscriptor mucho tiempo y esfuerzo. En aquellos lugares
del mundo donde no se tienen disponibles teléfonos públicos (para contestar una llamada),
la característica alfanumérica ofrece una gran ventaja sobre los otros tipos de ’
radiolocalizadores.
Tipo de Radiolocalizador Función
Despliegue alfanumérico Sonido
-
TonoLuz intermitente
Modo de Comunicación
Audible
Visual
Vibración Mecánica (se siente)
Letras del alfabeto, y puntuación Mensaje completo para leer
Ventajas: El contenido de la información es el mas alto de todos los dispositivos.
La señalización es rápida, por lo que la capacidad de canal de radio es grande.
Los mensajes son privados.
Los mensajes pueden ser salvados para una revisión posterior.
Los radiolocalizadores alfanuméricos pueden utilizarse como una extensión del
sistema mundial de información computarizada para recibir noticias, información
climatológica, resultados deportivos, información financiera (cotizaciones de la
bolsa), etc.
Desventajas: El costo del radiolocalizador es mas elevado que el de los otros modelos.
Se deben contratar operadores para línea telefónica para contestar llamadas del
público y pasar el mensaje al sistema de radiolocalización para ser transmitidas al
subscriptor.
5. “PAGING ON-SITE” (Radiolocalización en Sitio).
5.1. Aplicaciones
Los sistemas de radiolocalización OS fueron creados para cubrir un sitio local
usuarios y varían de una simple unidad de transmisor/control de baja potencia operando
con 5 radiolocalizadores a una de alta potencia, multisitio, sistemas multiacceso con 1000 o
más radiolocalizadores.
Todos los tipos de radiolocalizadores pueden ser utilizados en aplicaciones OS, porque los
mensajes de voz son también permitidos, los sistemas del tono y numéricos han satisfecho
generalmente las necesidades de la localización de empleados y una manera de transmitir
mensajes.
Por preprogramación una serie de mensajes alfanumericos fijos dentro de la memoria del
receptor, el cual son desplegados detalladamente al recibir un determinado número de
sucesiones por parte del que llama, un radiolocalizador numérico provee muchas funciones
en un “pager” (radiolocalizador) alfanumérico OS a bajo costo. Con el crecimiento de la
demanda de la transmisión de datos en el mercado de los cuidados de la salud y procesos de
la industria, los radiolocalizadores alfanumericos OS están teniendo más demanda.
Los sitios varían de grandes áreas con poco personal, donde el tiempo de viaje es ahorrado
a lugares populares como hospitales donde las llamadas de emergencia para grupos de
empleados (equipos de detención de ataques cardiacos) pueden ser citados con facilidad
para una unidad de llamada de grupo. Una camarera con radio localizador de tono, puede
ser notificado por el cocinero cuando su orden ya está lista.
5.2. Formatos de código
Han existido muchos y diferentes fabricantes de sistemas de radio localizador OS desde
1956, y cada uno tienen sus propias disposiciones y su propio formato de código.
Recientemente los formatos usan sucesivamente modulación de tonos de audio usando dos
bobinas de inductores de 2 cm. x 1.3 cm. en el rango de 5OOHz. A 3.4kHz. por ejemplo un
tono de 640Hz. tiene una bobina de 1 1.7H. y una Q de 10. Ultimamente estos fueron
reemplazados por filtros activos los cuales pudieron hacerse más pequeños con una alta Q
En estos tiempos la EIA (Electronic Industries Association) ha estandarizado dos tonos y 5
tonos sucesivos, los tonos estan en el rango de frecuencias de 67.OHz. a 1687.2Hz..
Tabla l . Formato de propiedades típicas digitales
Zapacidad de código de direccionamiento
rasa de localización (llamadadseg.)
rasa de datos
rasa de mensaje
Canal del radio
Modulación
Modo de transmisión
Condiciones de transmisión múltiple
Líneas de transmisión
Retardo absoluto de línea
Corrección de error potencial
Economía de la batería
Capacidad de mensaje
5.3. Pequeños sistemas
10,000 x 4 sistemas
Max. 13 llamadadseg. de tonos de alerta
Preambulo
40ch. 038 c/s.
80ch. 025 CIS.
5 12 bits/seg.
5 12 bitdseg.
25 kHz.
& 4.5 kHz. FM FSK
Manchester o NRZ
Quasi- sync o sucesiva
Modems de datos a 1200 bit/s.
0.25 ms.
+
0.195 ms. de transmisor.Distorsión de telegrafia 5 10% isocrónico
2 errores en preámbulo de 12 bits
2 bits en 32 palabras-código en no-mensajes.
1 bit en 32 palabras de código de mensaje.
Si. variable
Sin límite
Un sistema pequeño y moderno de radio localizador probablemente consiste de un
una combinación de un codificador “Paging” que consiste de un teclado y un display para
1 O dígitos y un pequeño transmisor de 1 W incorporando un micrófono integrado.
1 W de potencia de r.f. es suficiente para suministrar buena cobertura en los ambientes de
edificios de oficina, o a 200 o 300 metros de un hotel, y sobre los 8 km. en lugares abiertos.
El rango varía debido a la atenuación de los edificios, específicamente si son utilizadas las
estructuras de aceros reforzados o la reflexión de las ventanas para sol. La atenuación de
frecuencias diferentes pueden ser encontrados como se muestra en la tabla 2. la cual da un
nivel de promedio relativo en dB. esto se encontró cuando el usuario camina con el
localizador el pico tiene variaciones de 30dB. y son encontrados debido al desvanecimiento
de los efectos Rayleigh, por lo tanto esta tabla le sirve solo como guía.
Tabla 2 Atenuación a diferentes frecuencias
Urbano
Suburbano
Rural
3OMHz
dB
+35
+20
+6
150MHz
dB
+20
+10
O
45OMHz
-8 -10
+2
O
+12 +10
dB
dB
85OMHz
En h. f. el ruido de r. f. de maquinarias eléctricas, luz, líneas de potencia y el motor de los
vehículos prevalece. U.h.f. tiene beneficios marcados, en la penetración en modernos
edificios y sótanos.
5.6. Radiolocalizador con retorno de habla
Unidades portatiles de receptores radiolocalizadores y con capacidad de reconocimiento del
de habla y 2 formas de señalización provisto de cualquier combinación CTCSS
(Continuous Tone Controlles Squelch System) o las llamadas selectivas son utilizadas en
ambas direcciones.
En el Reino Unido este sistema esta licenciado como comunicación local y pares de
frecuencias son adjudicados con los receptores en la banda de 459 MHz., y la transmisión
en la banda de 161 MHz. las especificaciones típicas de un rango de radio localizadores con
retornos de habla el cual es requerido por diferentes mercados europeos se muestran en la
tabla 3. En Francia los radio localizadores de retornos con habla es en 445.5MHz. con un
espacio de canal de 12.5KHz. y un máximo ERP de 5OmW.
Una característica adicional es que la estación de control puede ser activada a través del
habla. tal que el receptor puede hablar directamente a otro. Esto es una facilidad para
equipos de ayudas primarias y guardias de seguridad.
La “European Selective Paging Association” (ESPA) usualmente es considerada, poniendo
adelante los propuestos a la “European Telecommunications Standards Institute “ (ETSI)
para reemplazar el cruce de banda en las frecuencias de retorno de habla por 10 frecuencias
adicionales en u.h.f.
Tabla 3. Especificaciones típicas de un radio localizador con retorno de habla
Rango de frecuencia del receptor
Espacios del canal
Sensibilidad (llamada típica)
Habla (1 2dB)
Canal adyacente opcional (típico)
Respuesta espuria (típica)
Emisión espuria (típica)
25MHz a 54MHz.
10, 12, 5,20,25kHz.
20pV/m
40pV/m
65dB.
50dB.
2nW
406MHz a 490MHz.
20kHz. a 2 5 H z .
1 5 pV/m
30pVlm
65dB.
50dB.
Rango de frecuencia de transmisión
Espacio de canal
Potencia de salida (típica)
Tiempo limite de retorno de habla
Distorsión de audio
Emisiones espurias (máx)
CTCSS (opcional)
Frecuencias RS220
10, 12.5, 20, o 25kHz.
20mW ERP
no restrictohestricto de acuerdo a las regulaciones.
I 5%
0.25pV
a standard EIA
103.5, 114.8, 151.1, 167.9,225.7,230.3Hz. etc.
6. “Paging” (Radiolocalización) de Area Amplia.
6.1. Formatos de códigos de tono
En ciudades grandes los radio localizadores fueron desarrollados por US BELL en los años
de 1960 seguidos por la Dutch PTT quien abrió su red nacional de Semafoon en v.h.f.
usando el tono de señalización EIA5 Motorola. Este tiene una capacidad de direcciones de
100,000 con una tasa de llamadas de 5 llamadas por segundo. La duración del tono fue de
33mS y la relación de la frecuencia de tono fue en progresión aritmética. El primer sistema
pan-European, Eurosignal, comenzó en 1967, utilizando un sistema sucesivo de 6 tonos y
tiene una capacidad de mas de 1 millón, con una tasa de llamadas de 1.25 llamadas por
segundo. La duración del tono es lOOmS y la relación de la frecuencia del tono es de
progresión geométrica.
6.2. Formatos de código digital
Bell Canadá introdujo un sistema de radio localizador digital de
A A
en 1970. Comparandolos formatos de tonos sucesivos, los formatos digitales pueden suministrar una capacidad de
direcciones en sistemas grandes, más economía en las baterías y en consecuencia utilizar
pequeñas celdas de potencia, tasas de llamadas más rápidas, reducción por integración en el
tamaño del radio localizador, funciones adicionales tales como el almacenamiento de
llamadas y mensajes en la memoria, múltiples direcciones y otras características. Suecia
sistema de transmisión nacional en 1970 y Japón, sobrepasando los 600,000 en un sistema
de tono, abriendo el sistema NTT digital en 1978. Entretanto en Norte América la mayoría
de los sistemas fueron reemplazados desde 1973 por formatos de código basados en el
código Golay.
En 1978 en el Reino Unido, la British Post Office anunció y conformó un sistema de
radiolocalizador digital, POCSAG (Post Office Code Standarisation Advisory Group). Este
fue el resultado de 2 años de trabajo de la British Post Office y representantes de las 16
mayores fabricantes de radio localizadores bajo la presidencia del Sr. R. Tridgell. Este
estándar fue adoptado por la CCIR como Código Radiopaging RPC N" l . En 1980 el
grupo consejero volvió a reunirse con la representación de todo el mundo, y fueron
agregados los estándares mínimos para mensaje numérico y alfanumérico.
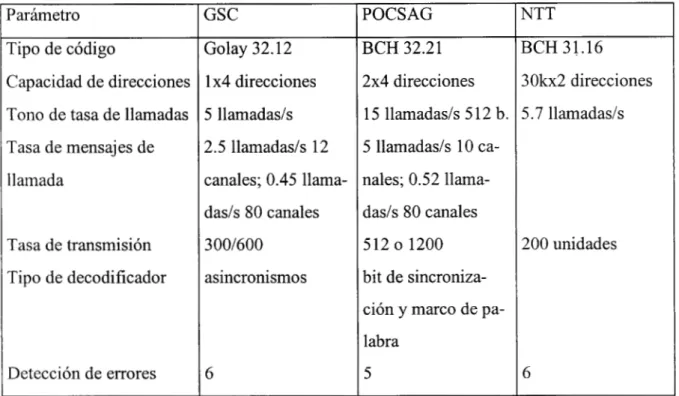
La tabla 4 compara los parámetros básicos de tres de los más significantes formatos de
radio localizadores digitales usados a la fecha.
Tabla 4. Comparación de códigos de formatos digitales
Parámetro
Tipo de código
Capacidad de direcciones
Tono de tasa de llamadas
Tasa de mensajes de
llamada
Tasa de transmisión
Tipo de decodificador
Detección de errores
GSC
Golay 32.12
1x4 direcciones
5 llamadas/s
2.5 llamadash 12
canales; 0.45 llama-
dads 80 canales
300/600 asincronismos 6 POCSAG BCH 32.21 2x4 direcciones
15 llamadads 5 12 b.
5 llamadas/s 10 ca-
nales; 0.52 llama-
dash 80 canales
512 o 1200
bit de sincroniza-
ción y marco de pa-
labra
5
NTT
BCH 31.16
30kx2 direcciones
5.7 llamadads
200 unidades
aleatorios
Corrección de errores
aleatorios
Detección de errores
salvados
Corrección de errores
salvados
3
11
5
2
11
5
3
15
7
6.3.POCSAG
Un boceto del formato de POCSAG es mostrado en la figura 1. Una sucesión de
transmisión comienza con una serie de dígitos alternos, 1 O 1 O 1 O 1 O.. . . . como un preámbulo
para iniciar al receptor del radio localizador para obtener la sincronización. Estos últimos
son al menos 576 bits los cuales son iguales a la duración de un batch mas un código de
palabra. Una palabra código de sincronización es luego seguido por 8 marcos, cada dos
códigos de palabra largos. En cada radio localizador es colocado una dirección en uno de
los 8 marcos y teniendo la sincronización ganada no es necesario dar vuelta completa en
cada marco, esto es para ahorrar batería.
Si hay un mensaje para un radio localizador entonces, inmediatamente es seguido por la
dirección de código de palabra. Esto puede ser cualquier número consecutivo de códigos de
palabra y puede continuar por más que un batch, pero la palabra de código de
sincronización reside en el frente de cada batch. El final del mensaje siempre es seguido
por la próxima palabra de código de dirección o una palabra libre.
El receptor distingue códigos de palabra y de direcciones, porque lee el primer bit
(F), el cual es un bit de bandera, que es igual a cero para un código de palabra de direccion
El código de palabras de dirección consiste de 21 bits, de los cuales los 18 más
significativos determinan la dirección. Los tres Últimos significativos no son transmitidos,
pero son utilizados para identificar el marco en el cual el código de palabra de dirección es
transmitido. Los bits 20 y 21 sirven para indicar cual de las 4 direcciones del radio
localizador esta siendo llamado. Ambos códigos palabras de dirección y de mensaje tienen
un bit final escogido para dar paridad par siguiendo el chequeo de los bits de paridad.
Los mensajes numéricos solo utilizan un formato de 4 bits por caracter, limitando mensajes
a números decimales, U (indicador de urgencia), espacio, guión, abierto y cerrado de
paréntesis. Esto ahorra tiempo aire, pero para mensajes alfanuméricos es utilizado un
bloque lleno de 150 caracteres de 7-bits.
6.4. Transmisión de
AA.
Los transmisores típicos de 100W/250W son utilizados para cubrir en áreas grandes en
zonas de radio localizadores, pero este tiene muchas excepciones a muy altas potencias,
siendo utilizados cruzando el mundo dependiendo de terrenos locales. Para cubrir el área
por este sistema generalmente se divide en zonas, estas zonas varían considerablemente en
tamaños de 256 a 25,600 K m 2 . dependiendo del servicio que se esta suministrando. El
principio sin embargo es el mismo, en el que el subscriptor del radio localizador se detiene
por el uso del aparato en las zonas escogidas.
Todas las llamadas del radio localizador son usualmente enviadas a un centro de control
donde es expedido a zonas relevantes de transmisión relevantes. El dato o mensaje que
PREAMBULO 1 O LOTE 2' LOTE
1 125s I- 1.0625s I. 1 0 6 2 5 s
1 2 - 19 20 - 21 22 - 31 32 NODEBIT
F = O BITS DE DIRECCIONAMIENTO 20 - 21 CHEQUEO DE BITS DE PARIDAD
DIRECCIONES CODIGO PALABRA
F = l MENSAJE DE BITS 20 - 21 CHEQUEO DE BITS DE PARIDAD . DE MENSAJE CODIGO PALABRA
Fig.1 Formato de código POCSAG RPC no.1
Algunos sistemas de transmisión llama dos o incluso tres veces dependiendo del
suministrador de servicio.La transmisión en estas zonas puede se sucesivo o simultáneo.
Frecuentemente solo una frecuencia es empleada pero BT, quien pretende cubrir el 97% de
la población del Reino Unido con un estimado de medio millón de subscriptores, tiene 2
canales de frecuencias y 40 zonas, donde estas zonas son adyacentes, con grados de
variación de señales traslapadas e interferencia de canales, las llamadas son transmitidas en
tiempos cortos. Las zonas son localizadas en tiempos cortos tal que el traslape sea
minimizado. Los tiempos cortos pueden variar en longitud dependiendo de la población de
radio localizadores en cada zona.
Para el
RCP
N"
1 el formato de código sucesivo de transmisión puede también ser utilizadoCuando la transmisión no es empaquetada todos ellos corren en un modo de cuasi
sincronización y por consiguiente requiere de alta estabilidad con la temperatura y tiempo
(2 x lo8 sobre -10°C a +50"C y 0.5 ppdaño); un transmisor es utilizado para transmisión
sucesiva. Estos deben tener una máxima línea de diferencial de retardo no mas grande que
250ps y distorsión isocrónica no más grande que 10%.
Es posible que en área de zonas de traslape o con tiempos de corte, para recibir 'la misma
llamada del radio localizador llama dos veces, a pesar de que uno de las llamadas es de un
nivel de señal de dominio mucho más baja que otros. Muchos radio localizadores tienen
memoria configurada tal que ellos rechazan una segunda llamada idéntica.
6.4.1. Modulación digital.
La modulación digital de señales de modulación de fase es inadecuada y por consiguiente
se utiliza el corrimiento de frecuencia (FSK). Por las características especiales de POCSAG
y formatos similares es utilizado el no retorno del cero. Esto quiere decir que la modulación
de frecuencia esta entre +4.5KHz. o 4 . 5 k H z y la modulación no disminuye a cero durante
el cambio. Tres tipos comunes de modulación digital para un número binario como se
muestra en la figura 2 .En el nivel
NRZ
un uno es representado por el nivel uno y cero porotro nivel. En la señal NRZ un uno es representado por un cambio en el nivel y.un cero por
un no cambio en el nivel. En el nivel bifase un uno y un cero son representados por una
1 O 1 1 O O O 1 1 O 1
Fig.2.
r
11
6.5. Sistema sueco mobilsoekring
(MBS)
Este sistema grande para esta nación fue lanzado por la compañía sueca PTT en 1978 y
utiliza la infraestructura de la transmisión de FM. El costo efectivo del sistema para
ciudades con población escasa; 8 millones de personas en 449,750 K m 2 . Su utilización se
realiza en una de las transmisiones programadas de estéreo en la banda de 87MHz. a
104MHz, el cual cubre gran parte de Suecia y algunos lugares de Noruega y Dinamarca.
La transmisión es por información modulada binaria codificada diferencialmente a l . 187
kHz. (k6Hz) sub portador con máxima desviación de f36kHz. esta señal de 57kHz. es
transmitido como un subportador como una señal programada de FM. Este subportador es
amarrado en fase a una señal piloto multiplexada de 19kHz.
Porque el programa opera en diferentes áreas a diferentes frecuencias el receptor explora la
de identificación. La persona que llama marca cuatro dígitos de entrada, un subscriptor
marca un número de 6 digitos y además dígitos para opciones. Tales como el código de
privacidad el cual es utilizado para prevenir a llamadores desautorizados a radio
locializadores subscritos. Un código de radio localizador de 52 bits el cual es enviado
consiste de dos bloques de 16 bits de información y 10 de paridad para checar bits.
7. Diseño del receptor de radio localizador
El desafío para diseñadores de receptores de radio localizador es siempre presentar una
radio con mas facilidades dentro de una unidad pequeña.
En 1970 un tamaño típico f i e de 13cm x 6cm x 2cm pero hoy las unidades de tono de áreas
grandes pueden ser de 5cm x 4cm x 1 Scm o 5cm x 1.5 cm x 1 Scm dependiendo del tipo de
batería a usarse. Un radio localizador numérico del tamaño de un lapicero fountain ha sido
utilizado por varios años, y un radio localizador que se puede ver en la muñeca de la mano
fue lanzado. Los radio localizadores al estilo de tarjeta de crédito de 7.5cm x O h m x5cm
son corrientemente disponibles en la red nacional de Hong Kong a 280MHz. y utilizando
una celda aérea de zinc a 1 . 4 ~ de capacidad de 700mAh, muchos de estos ambiciosos
formatos fisicos tienen sensibilidad cuando se rosa en el cuerpo.
El diseño de receptores de radio localizador debe concordar con los requerimientos de todo
el mundo en el rango de 25MHz a 900MHz.
7.1. Especificaciones de los receptores
Las especificaciones típicas de los receptores son mostrados en la tabla 5. Cada país tiene
sus propias regulaciones con la aprobación de sus autoridades. (PPT, FFC etc.) usualmente
hay diferencias entre ellos. Bajo las directivas de la comunidad europea, los radio
localizadores tendrán sus propias reglas aprobadas para su venta en el mercado de la
comunidad europea. Esto ahorrará costos de múltiples aprobaciones y reducirá el tiempo de
Las regulaciones pertenecientes a los receptores de radio localizador tanto en Europa y
América del Norte serán restringidas a la interferencia “EMC” ( ElectroMagnetic
Compatibility ) de un receptor y en Europa tendrán inmunidad a la interferencia externa. En
Europa las regulaciones también especifican un mínimo de inmunidad para descarga
electrostática. Las especificaciones actuales y los límites de un estándar común europeo
serán debidamente anunciados en 1992. Los operadores de sistemas de áreas grandes,
determinaran sus propias especificaciones mínimas para su ejecución, mismas que los
fabricantes del equipo tendrán que aceptar si les desean vender a ellos.
Tabla 5. Especificaciones típicas del receptor. La sensibilidad es dependiente en formato
código y usuarios de radio localizadores durante la repulsión de co-canales dependientes en
código, habla y técnicas de medición.
parámetros
Sensibilidad en el chasis: de frente Sensibilidad en el chasis: 8 pos.ave Espacio de canales
Selectividad de canales adyacentes Emisiones espurios sobre 1GHz. Rechazo de co-canales
Rechazo de intermodulación
25 a 49MHz. 8pVIm 12pVlm 10/12.5kHz o 20125kHz >50dB o >60dB 2nW
-2dB a -1 OdB >45dB
138 a 174MHz. 5pVIm
8pVIm 25kHz >65dB 2nW
-2dB a -1 OdB >50dB
406 a 470MHz. 8pV/m 1 OpV/m 20/25kHz o 12.5kHz >65dB 2nW
-2dB a -1 OdB >50dB
7.2. Arquitectura de los receptores.
La arquitectura de los receptores que usualmente han utilizado un simple superhet, doble
superhet y conversión directa. Mas tarde tienen un alto grado de integración de o un simple
circuito multichip, más el soporte de una circuitería de múltiples voltajes, antena integral,
transductor de alerta y batería. Este comportamiento se hace especialmente a muy pequeños
Inicialmente estuvo basado para ser vulnerable a la interferencia cercano a los transmisores
de alta potencia debido al pobre rechazo de AM, pero ahora hay varias técnicas para
minimizar este efecto.
Los procesos análogos de habla no son posibles de utilizar en conversión directa, esto es
solo adecuado en aplicaciones de áreas grandes. Un típico superhet simple y un diagrama de
bloques de conversión directa se muestran en la figura 3 y 4. La figura 5 muestra el
diagrama de bloques de un decodificador y secciones de audio. Un decodificar de áreas
grandes puede omitir la sección de amplificación de audio. El habla se muestra a la salida
del que habla pero esto puede también tener una simple canalización a través del
transductor de sonido.
AMPLIFICADOR FILTRO
R.F. SAW b MEZCLADOR O
. a
5 0
w < 9 J i i 2 n w
W E
A
O
DE FASE DE CUADRATURA SEÑALES
LOCAL
2.2V DC
v
1 . S / DCP
BATERIA DE 1.W DC DC A DC
...
DECODIFICADOR MEMORIA
. .
I . I .
A , .
, ,
, , A
I . I'
. , . , I , . . . . , , . , . , . .
MEZCLADOR AMPLIFICADOR i ; OSCILADOR
. , DE 32kHz
- Y L r Y 8. . , I) <
FILTRO LIMITADOR j j
ENTRADADEFRMTE DEIF.ALASALIDA DELATAWETA
1
1
A AMPLIFICADORDE FILTRO I.F.
AMPLIFICADOR
DETECTOR Y
A PRE
AMPLIFICADOR
F F RED AGC
'
AMPLIFICADOR DE AUDIO ALTA VOZSEÑAL BEC +3v
AMPLIFICADOR
-
Y b DEAMPLIFICADOR
-
LAMPDRIVER ?
DETECTOR DATOS
ARREGLO DE COMPUERTAS
RELOJ BEEP
XL3 F DRIVER
S'>
+ 3 v I I
BATT +
EEPROM
DETECTOR
BATERIA BAJA
RELOJ
Y DISPLAY
b a
LCD DRIVER
VIBRADOR DRIVER
-
+3vFig.5
El último muestra un pequeño radio localizador en sitio pero muchos usuarios insisten en
una mejor calidad y menor ruido, que es posible obtener de la salida del transductor de
sonido. Sus características de audio tienen un substancial pico de resonancia en la banda de
2.5
kHz.
a 3!sHz. el pico es necesario para la máxima ganancia en los pequeños ruidos delun requerimiento en las especificaciones del operador, usualmente en el rango de 75dB a
85dB medidas en SPL en una habitación sin eco con cara al transductor de salida, y a una
distancia de 30cm.
El factor de ruido de rf. al final usa un voltaje muy bajo y una corriente mínima, es muy
importante el factor en la tasa de S/N el cual finalmente entra al decodificador, pero la
ineficiencia de la antena que tiene que ser utilizada determina una sensibilidad completa.
7.3. Antenas.
Frecuentemente son utilizadas las antenas de ferrita en la banda de recepción de 25MHZ a
54MHz. y algunas veces en la banda de 137MHz. a 174MHz. para la banda de antena de
430MHz. a 490MHz. pueden ser de una espira helicoidal, con un radiador discontinuo, etc.
Desafortunadamente, por el espacio limitado sin un radio localizador, proximidad de
cercanía de otros componentes y rastros de tierra, las antenas uhf no están capacitadas para
operar en estado óptimo. Por otra parte las antenas pueden resultar con una buena
sensibilidad (ejemplo 5mV/m) medidos en un campo abierto aplicado para un polo en una
línea pelada en el laboratorio, el desempeño se reduce considerablemente cuando esta
gastada la antena debido a los efectos de la carga.
7.4. Desempeño de los métodos de medición.
Existen dos dificultades particulares en el desempeño de las medidas en los receptores del
radio localizador.
1. La señal de llamada debe ser digitalmente modulada en las direcciones
del radio localizador.
2. La antena integral impide la conexión directa de la señal del generador.<
No resistiendo a las dificultades, los métodos de medición más comunes utilizados, estan
debajo del nivel de llamada del generador de señales e incrementa este nivel en OSdB,
envía la dirección del radio localizador 5 veces en cada etapa. El generador de nivel, del
sensibilidad. Este puede ser mostrado para ser relacionado teóricamente 87% de
probabilidad de llamada.
Otro método, de IEC N" 49, y obligatorio para radio localizadores, cuando se determina la
sensibilidad del equipo utilizado en el sistema alemán Cityruf, de la siguiente manera. El
nivel del generador de señales es ajustado al menos 10% del tono de solo llamadas. La
señal es continuamente repetida tal que se acierte cada vez si un tono de solo una llamada
es satisfactoria o no. El nivel es incrementado por 1dB hasta que tres llamadas sucesivas
sean satisfactorias o no.
El nivel de incremento luego será notado. El nivel será reducido por 1dB anotado el nuevo
nivel. La señal luego será enviada 20 veces. El nivel de la señal:
1. Rehacer lo mismo si un solo tono de llamada es satisfactorio.
2. Es incrementado por IdB., y el nuevo nivel es anotado si un solo tono de
llamada no es satisfactorio.
3. Es reducido por 1dB. y el nuevo nivel será anotado si 3 tonos de una sola
llamada son satisfactorias.
La sensibilidad del radio localizador es observado para tener el promedio aritmético de los
niveles anotados.
Como la conexión de una línea directa de una llamada modulada no es posible, el radio
localizador debe estar ubicado en un campo uniforme capaz de ser variado. Comúnmente
son utilizados tres métodos:
l . El radio localizador es atado a 1.5 arriba del polo del poste y de la tierra en un campo
abierto, y es enviada una señal de una antena calibrada a 30 metros. Esto es importante
si el área es libre de arboles y esta cerca de los edificios. Para ahorrar distorsiones de
reflexión de campos electromagnéticos uniformes.
3. El radio localizador es ubicado en un celda "TEM" (Transverse ElectroMagnetic).
El primer método suministra un resultado directamente absoluto, pero debido a la
naturaleza de los procesos de llamada, varios resultados deben ser promediados. Aunque
deben ser calculados la raya de la línea y la celda TEM , esto se hace usualmente tomando
una celda TEM portátil fuera en un sitio libre y correlacionado con el nivel enfrente para
determinar un polo, directamente de los niveles de la celda TEM requeridos.
El segundo y el tercer método requiere un ambiente con una radio libre de ruido, esta es la
principal ventaja al usar una celda TEM en el tercer método.
7.5. Sensibilidad del campo libre.
Porque en la practica la transmisión debe arribar al receptor de cualquier ángulo, las
especificaciones de sensibilidad son frecuentemente expresadas en términos del campo libre
en un promedio de 8 posiciones. Para este propósito un polo en el radio localizador es
rotado y medido cada 45" grados comenzando con E l .
La sensibilidad esta dada en términos de E,, que se da en la ecuación (1).
x
8
E,,,
= ... (1)La relación entre la sensibilidad entre estar de frente en campo libre y el promedio de las 8
posiciones es ordenado para dar un diseño ordenado para el receptor. Pero necesita estar
determinado por la medición del campo (un lazo aerial tendrá significante nulidad en 90" y
270" con respecto al frente. Considerando un monopolo helical que tendrá mucho mas diagramas circulares polares) entonces un factor de correlación entre la sensibilidad de las 8
posiciones a campo libre y con figura en frente en la celda TEM también puede ser
Para algunas especificaciones del operador en grandes áreas publicas, las mediciones son
primero. Otras especificaciones de radio localizador son gastados en las mediciones en el
chasis en campo abierto o libre. Mientras que las diferentes antenas son afectados en
diferentes maneras por el chasis. Desde los diferentes efectos de los chasises de la misma
antena a diferentes grados, para establecer una opinión en la sensibilidad del chasis, las
mediciones de sensibilidad del mismo radio localizador en 30-50 gentes diferentes son
requeridos. Sin embargo estos aparecen con una correlación no obvia entre la altura y el
peso del soporte y la sensibilidad medida. Esto fue encontrado en las mediciones hechas de
la sensibilidad en varios diseños de radio localizadores, cada gasto hecho en 40 personas,
puede tener una desviación estandar de aproximadamente 4.0pV/m.
7.6. Fuentes de potencia.
Para penetrar al mundo en el mercado de radio localizadores deben estar diseñados con
celdas primarias fácilmente disponibles porque, con la excepción de sistemas en sitio con
más de 20 a 40 radio localizadores. El usuario generalmente no desea comprar un cargador.
Estas considerables restricciones para escoger la celda desde que una adecuada tecla de la
celda no esta libremente disponible h e r a de Norte América y ciudades de gran parte de
Europa. Como la vida de una batería de 800 a 900 horas o cerca de 2 a 3 meses,
dependiendo de un receptor de radio localizador y sistemas utilizados. Las celdas AA son
requeridas ya que son ampliamente utilizadas. Con una mejoría en técnicas de circuitería y
disponibilidad en todo el mundo, las celdas
AAA
con periodos renovables de 1 a 2 mesesson frecuentemente utilizadas ahora. Las celdas
A A
recargables de 50OmAHrs. sucapacidad puede ser utilizado de una simple o múltiples maneras de cargadores disponibles.
Las celdas no recargables, tales como zinc. Alcalina, dioxido de magnesio, comienzan su
visa con 1.5V y lentamente decrece alrededor de 0.9V. las celdas recargables solo
comienzan aproximadamente a 1.25V pero mantienen su nivel, luego rápidamente colapsa
cuando se descarga. La circuitería del radio localizador tiene que tener en cuenta estas
diferentes características especialmente cuando la más baja temperatura de trabajo es -
7.7. Economía de las baterías.
Para suministrar aceptables celdas primarias todo un tiempo de vida adecuada, se requieren
formatos para códigos de radio localizador y diseño de receptores. Refiriéndonos a la figura
6 y asumiendo que el código es POCSAG, entonces el circuito decodificado siempre esta
prendido, pero solo se activa en la circuiteria del radio cada 0.4 a 1 segundo (dependiendo
de la tasa de datos) para la búsqueda del preámbulo. Si el preámbulo ha detectado una
palabra sync comienza la búsqueda mientras se siga manteniendo prendido el receptor.
Cuando una palabra sync es ubicada, el radio localizador es sincronizado con la entrada de
la corriente de datos e inmediatamente se apagan los circuitos de la radio hasta que el
propietario del radio localizador aproveche un marco de 8. La radio es luego apagada
solventando períodos de lOms seguidos por un periodo de 64 bits para leer el codigo de
palabras de direccionamiento. Si el direccionamiento es encontrado el tono del radio
localizador prenderá una luz y dará un tono de aviso, para luego una llamada alfa o un
código se decodificará y desplegará y/o almacenará el mensaje, antes de que la sección de
radio este otra vez apagada.
7.8. Programación del receptor.
Cada receptor necesita ser programado con un dirección individual o direcciones con sus
opciones de función. Esto es sacado fuera con una unidad de programa el cual puede ser
utilizado para programar el receptor por el fabricante y ser reprogramado por los soportes
de servicio de ingeniería si es deseado. Cada radio localizador tiene un tipo de bujía en la
memoria programable. En los años 1980 este pudo haber sido un arreglo bipolar tales como
una matriz de diodos de 8x4 con fusibles. La programación tomara su lugar con el paso de la corriente de 1A. a través de estos ligues por un período de 1Oms. Para formar un circuito
abierto. Las desventajas con este tipo de memoria fue que para cambiar el programa a una
nueva memoria tuvo que ser utilizado como reemplazo el viejo. El diseño de la unidad de
programación tuvo que ser garantizado en corriente y el tiempo para el control de ligues,
Para que un personal de las computadoras llegue a ser menos caro y más redituable, el
campo de los programadores para el servicio en work stations fue diseñado usando un
simple driver de interfaces entre la PC y la memoria del radio localizador. Como las
EPROMs llegaron a estar disponibles, estas fueron utilizadas como una memoria
programable del radio localizador. Recientes versiones de 128 bits tuvieron suficiente
memoria para radio localizadores con dos direcciones y longitud de 3 1 bits, y una serie de
opciones programables. Estos fueron programados por una PC que necesita 15 voltios para
programar satisfactoriamente la EEPROM. Las ultimas versiones de EEPROM con 4 K de
memoria y 3 voltios con capacidad de lecturdescritura reemplazando los recientes tipos y
haciendo posible su almacenaje de precodificación de texto alfa, textos de diferentes
lenguajes y caracteres personalizados. Estas opciones fueron incorporados en la memoria
del radio localizador y son dados de alta por transmisión de código numérico. Para el radio
localizador alfanumérico el cual requiere mas grande memoria para almacenar los mensajes
recibidos, las RAMS trabajan a 5 voltios y están capacitados para almacenar 6000 caracteres
a ser utilizados, la desventaja con este tipo de dispositivos es que se necesita separar la
batería de respaldo, para radio localizadores numéricos el cual solo requiere almacenar
pequeños mensajes numéricos, la
RAM
del microprocesador puede ser utilizada sin bateríade respaldo. La ventaja de la EEPROM de 3 voltios de lecturdescritura es que la
programación es posible donde el radio localizador recibe información transmitida
reprogramada en la estación base. A bajo voltaje este puede ser reescrito en su propia
memoria.
8. Radio localizadores de Breas grandes privadas. 8.1. Radio localizadores superpuestos
La superposición de radio localizadores es un sistema donde las direcciones de llamada son
enviados sobre un PMR de dos maneras de sistema de radio vehicular para alertar
directamente al conductor, quien tiene temporalmente a la izquierda su vehículo, y así un
mensaje hace que preste atención o este alerta. Tales adiciones a los esquemas PMR son
1. El número de receptores de radio localizadores móviles no debe exceder el número de
móviles en un sistema y cada receptor de radio localizador debe ser utilizado solo en
conjunción con una estación particular móvil.
2. La estación transmisora potencial de base normal no debe ser incrementada.
3. El uso de estaciones adicionales no pueden ser licenciados solamente en la tierra que
son necesarios para superposición de radiolocalizadores.
4. Los sistemas de radiolocalización deben usar el mismo tipo de modulación así como el
sistema móvil el cual es empleado.
8.2. Reversión de radiolocalizadores o llamadas secundarias.
La reversión de radio localizadores, o llamadas secundarias es un agregado al sistema PMR
donde las direcciones del radio localizador originadas en la estación base son recibidas por
un radio vehicular y transmitidos a un receptor de radio localizador y llevados por el
conductor.
8.3. Radio localizadores privados en sitios cerrados.
Estos son subscriptores no públicos de sistemas de áreas grandes (sobre los 10 Millas2).
Para evitar la interferencia entre pequeños vecinos en los sistemas en sitio, las frecuencias
alternativas son escogidos donde sean disponibles. En el Reino Unido, para minimizar la
interferencia, los fabricantes quienes son miembros de la Radio Paging Association,
determinan el canal aproximado por la orden de entrada de las coordenadas territoriales de
la posición del transmisor dentro de una base de datos de los sistemas existentes. Esto es
posible aunque, para un grupo de sitios adyacentes de tiempo compartido es el mismo canal
de frecuencia. En el Reino Unido específicamente el tiempo de ranura es de 15 segundos en
un ciclo de 60 segundos; son ubicados en un sitio para transmitir sus llamadas de
radiolocalización. Son propietarios del formato de código y no es mostrado el habla. En el
Reino Unido son ubicados 5 frecuencias de 25kHz canales en la banda de 153.375MHz a
8.4. Sistema alemán POSPO.
Un nuevo sistema de radiolocalización privada (POSP) ha sido propuesto en Alemania y
sus especificaciones ya han sido publicadas, este no es una iniciativa "ETSI", y
corrientemente se aplica solo en Alemania, cada transmisor de sitio es ubicado
específicamente 6 segundos permanentes de ranura en un ciclo de 60 segundos. La sucesión
de la ranura de tiempo es estandarizada (numerado del 1 al 1 O) y comienza con un corte de
tiempo N" l. Al comenzar un nuevo minuto. La ubicación de la ranura de tiempo es llevada
fuera por Deutches Bundesposte, cuando la licencia es utilizada. El uso de más que un
transmisor sincronizado de 15W es mostrado en la misma ranura de tiempo, para mejorar la
transmisión a distancia sin un sistema. Una sucesión de ranuras de tiempo pueden ser
ubicados para un usuario donde el sistema tenga una alta tasa de llamadas. La ZZF expide
un rango de códigos de dirección a los fabricantes de equipo aprobado.
9. Sistema Pan Europeo.
9.1. Euromensaje.
Este sistema (tabla 7) abierto en 1989 y es ahora operable en la mayores regiones
industriales y ciudades de Francia y Alemania del Oeste, en el Reino Unido en Londres y
en innumerables casas, y algunas partes de Italia. La mensajería completa es posible en
cada ciudad individual y las especificaciones comunes son mostradas abajo. Las funciones
adicionales son añadidas de acuerdo a los requerimientos de los operadores nacionales.
Tabla 7 código
N"
1 de radio localizador CCIRI
ParametrosI
valorFrecuencia 466.075MHz. f50Hz. (offsets de frecuencia max. k
1800Hz. mostrado) Desviación
I 2 7 5 ~ s . Tiempo de subida de la señal
1200 k lOBaud Tasa de transmisión
20 o 25kHz dependiendo de la ciudad Espacio del canal
f 4.0 o f 4.5KHz. dependiendo de la ciudad.
Las desventaja de este sistema es que desde que las utilidades existentes de las redes de
radiolocalizadores en cada ciudad, es solo posible llamar a un radiolocalizador en algún
lugar de Europa a través de su propia base nacional.
9.1 . l . Transmisión.
El tiempo de ranura de transmisión es utilizado para garantizar un desacoplamiento de las
áreas adyacentes semi utilizadas. Uno, dos o máximo tres áreas semi utilizadas forman una
zona de radio localizador dependiendo del tráfico y de la ciudad. La duración del tiempo de
ranura del ciclo puede ser ajustado conforme a los requerimientos del tráfico y las
diferencias que son mostradas abajo. En el caso de Alemania la figura ordenada refiere a un
sistema standard Cityruf y el rango muestra la posibilidad de expansión para Euromensajes
cuando el tráfico se incrementa.
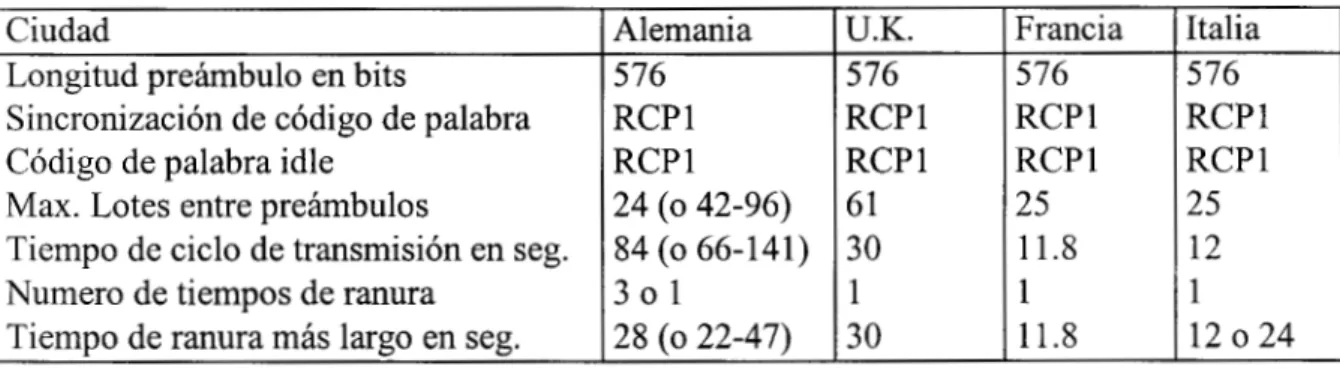
El método de llenado de una ranura de tiempo con una palabra idle, debajo de un bajo nivel
varía entre los 4 operadores (tabla 8) como el total de longitud de tiempos de ranura.
Tabla 8. Metodos utilizados por Euromensajes
Ciudad
Longitud preámbulo en bits
Sincronización de código de palabra Código de palabra idle
Max. Lotes entre preámbulos
Tiempo de ciclo de transmisión en seg. Numero de tiempos de ranura
Tiempo de ranura más largo en seg.
9.1.2. Receptor de Euromensajes.
Alemania
576
RCP 1
RCP 1 24 (O 42-96)
84 (O 66-141)
3 0 1
28 (O 22-47)
U.K.
576
RCP 1 RCP 1 61 30 1 30 Francia 576
RCP 1
RCP 1 25 11.8 1 11.8
F
12 o 24
Los receptores numéricos deben estar capacitados de recibir al menos 15 caracteres por
llamada y los receptores de radio localizador alfanuméricos al menos 80 caracteres por
Tabla 9. Especificaciones del receptor Euromensaje
Parámetro
250dB Repulsión de respuesta espurios: imagen, sobre o debajo 47-60MHz 87-
250dB Respuesta de intennodulación
2-8dB Repulsión de co-canales
260dB Selectividad de canal adyacente
132pVlm Sensibilidad mínima: tono solo en campo libre
129pVlm Sensibilidad mínima: tono solo en el cuerpo (hombre salado)
Valor
108MHz 174-230MHz O 470-862MHz
I
Todos los demás casos I260dB-1
9.2.Ermes.
Este nuevo servicio de radio mensajes europeo debió de comenzar en 1992. Los estándar
son el resultado de un trabajo de grupo de ETSI. Y están esperando la aprobación de
ciudades individuales antes de ser aprobados por el ETSI, todos los operadores usaran los
canales dentro de 16 lugares. Y el mismo protocolo, tal que un operador de un radio
localizador trabajará con otro operador de sistema.
Los operadores en 16 ciudades europeas incluyendo el Reino Unido, Francia, Alemania e
Italia, firmaron un memorándum de entendimiento, para proveer un sistema que permita un
recorrido internacional y servirá a cada una de las ciudades capital y un 25% del total de la
población en servicio (90 millones de personas) allá por diciembre de 1993. El radio
localizador explorará 16 vhf, canales de radiolocalización, mucho de los cuales ya están
siendo utilizados en estas ciudades por otros servicios
Los servicios a ser suministrados son: tono, número, alfanumérico y datos transparentes.
Características adicionales son opcionales tales como: reconocimiento del radio localizador,
destino de llamada, tres niveles de prioridad, servicios de carga, protección de perdida de
Las especificaciones para ERMES son dados en esta tabla:
Parametro
Rango de frecuencia Canales
Modulación Tasa de datos Tasa de símbolos Corrección de error
Intersalida para suministrar para apresurar la corrección de error
valor
169.4125MHz. a 169.8125MHz.' 16 canales con espacio de 25kHz.
nivel 4(4-PAM/FM) 1k4687.5 y k1562.5Hz. 6.25Kbit/s
3.125baud
2 bit(30, 18) código de ciclo entrecortado mensaje solo a una profundidad de 9 de código de palabra.
9.2.1. Formato de código
9.2.2.
La construcción de los códigos transmitidos son mostrados en la figura 6., se muestra una
sucesión de 60 minutos, el cual es 1 ciclo por minuto, posteriormente se detalla una
sucesión de 12 segundos, El lote es expandido dentro de su sincronización, sistemas de
información, bloque de direcciones del radio localizador, y bloque de mensajes de código
SUCESION
60 MIN. 60 CICLOS
" " ~ " " " ~ ' 56 57 58 59
I
CICLO1 MIN. 5 SUBSUCESIONES
O 1 2 3 4
7'
SUBSUCESION12 SEG. 16 LOTES
A B C D E F G H I J K L M N O P
SINC. INFORMESINC. DIRECCIONES MENSAJES
(ALTO>>>>>>>>>> BAJO)
Fig.6
La economía de la batería es construida en un formato de varios niveles y asiste en el ahorro
de corriente, las direcciones y el sistema de información no están intemivelados. El radio
localizador será direccionado en solo uno de los 60 lotes (A-P) en forma subsecuente,
habilitando para ignorar cada otro lote de 60. Una vez que el radio localizador ha sido
direccionado sin un lote, el correspondiente mensaje puede estar en cualquiera de los siguientes lotes de la subsucesión, o en la siguiente subsucesión, y estar a punto a los 12
segundos del comienzo del lote contenido en la dirección adicional. El radio localizador
direccionado por consiguiente debe monitorear todos los subsecuentes lotes hasta encontrar
uno con su propia dirección añadida, o en tiempos fuera de los 12 segundos. La economía
de la batería es también posible de otras maneras pero el proceso comienza a hacerse
complicado.
En las redes de multifiecuencia el receptor de radio localizador serán informados en que
canal esperaran el mensaje. Este es consumado con una combinación de un indicador de la
frecuencia de un subgrupo transmitido en la partición del sistema de información. El
localizador será asignado con un número de frecuencias de subgrupo (FSN) entre O y 15.
Este identificador es un indicador de un Único subgrupo de 5 subgrupos de frecuencias
(FSI). Cada FSI define un Único subgrupo de FSNs en el cual el mensaje puede ser directo.
La transmisión en FSI en un canal de radio localizador indica que los mensajes serán
transmitidos por radio localizadores con un FSN en subgrupos de FSIs. Por ejemplo,
cuando el FSI en un canal es igual a 27, solo recibirán o enviarán mensajes con FSNs de 12,
13, 14 o 15. Recíprocamente un receptor con FSN igual a 12 debe buscar sus mensaj es solo
en canales de transmisión de 12,22,29, o 30. Los FSNs no corresponden a la frecuencia de
los canales numerados.
9.2.2. Transmisión
Varios cientos de estaciones de base de transmisores de 100/250W por ciudad inicialmente
serán empleados en la operación de cuasi-sincronización. La modulación de estaciones base
adyacentes deben ser sincronizados tal que no mas de un diferencial de retardo de 50ms. sea
medido en el receptor aplicando la división en zonas y 12 segundos, 16 lotes subsecuentes
(figura 9) son ubicados en la una zona.
1 O. Radio localizador indirecto satelital.
El servicio skytel en los Estados Unidos utiliza un satélite geostacionario. La estrella IV
oeste, para comunicar con un satélite da de alta a la estación operando en la banda C
utilizando propagación de modulación de espectros en California, y el satélite se da de baja
a través de los Estados Unidos. La persona que llama utiliza el PSTN para hacer una
llamada libre de cualquier lugar de los Estados Unidos a una central de cómputo de radio
localizador en Washington DC. Luego pasan esta llamada a una estación ligada en
California. Seleccionadas las llamadas del radio localizador estos luego son transmitidos en
un tiempo aproximado de 20 segundos. Y esto es aprobado para tener una cobertura de 85%
de la población de los Estados Unidos. Redundantemente es construido dentro del sistema
por un segundo satélite el cual opera en la banda Ku. El bit de tasa de error de un sistema es
de el Reino Unido por un número telefónico de Washington y un radio localizador uhf.
Puede ser permitido en los Estados Unidos y el Reino Unido.
El terreno del transmisor de frecuencia usado es de 93 lMHz y su frecuencia también ha
sido ubicado o reservado en Canadá, Singapur, Malasia, Shanghai, Bolivia, Brasil,
Uruguay, Ecuador, Perú, Sri Lanka y Venezuela.
11.Ejemplo.
A
continuación se muestra un diagrama general a bloques de un sistema actual (Agosto-1999) de Radiolocalización (Paging) funcionando en México. Fig.7.
Primero la llamada es generada por una persona, la cual quiere enviar un mensaje a un
“pager”, entonces la llamada entra a la red pública Telefónica, de ahí se enruta a la
dirección del centro de llamadas (Compañia de Radiolocalizacion) a través de troncales
analógicas o digitales, llega al conmutador de la empresa en cuestión, y un sistema de ACD
(Automatic Call Distribution) le envía la llamada al operador telefonista que tenga más
tiempo sin atender llamada, éste operador captura el mensaje para la clave del “pager”
solicitado en la base de datos, el mensaje viaja a través de la red de datos y se envía a la
terminal de “Paging”, ésta a su vez codifica el mensaje y lo sube al satélite, el satélite lo
baja abarcando todo el país, en varios lugares hay instalado un sitio que baja la señal del
satélite y la pasa a un tx local que radia la señal finalmente para que el “pager”
Fig.7.
C 0-AD O R
ANALOGICAS
DIGITALES O
1
ACD
TELEFONOS ...e
TELEFONISTAS o
OPERADORES
@
@
@ @
. . . .
O O O
-ALES
DE C A P l U R A
. . .
.
DE "PAGING
DATOS
a-l
TRANSMISORES12. Bibliografía.
- BT (1 980) A standard code for radio paging, reporte de la Post Office Code
Standardistion Advisory Group (POCSAG). Junio 1978 y Noviembre 1980.
- BT (1986) The book of CCIR Radio Paging Code N" 1, Radio paging Code Standards Group.
- French, R.C. (1 984) Una alta tecnología vhf. Receptor de radio localizador, IEE 1984
Conference on Mobile Radio Systems, septiembre.
- IEC (1987)
N"
189, Parte 6, segunda edición.- Komura, M. et. al (1 977) Nuevos sistemas de radio localizador, Japon Telecom Review.
19, julio.
- Makitalo, O. Y Fremin, G. (1970) Nuevos sistemas para radio localizador sobre una red
de transmisión FM. TELE (Edición inglesa) XXII, (2).
- Sandvos, J.L. (1982) una comparación de códigos binarios de radio localizador, IEEE
Vehic. Tech. Conference, Mayo.
- Tridgell, R.H. (1 982) Código de radio localizador CCIR N" 1, un nuevo standard
mundial, IEEE Vehic. Tech. Conference, Mayo.
- Tridgell, R.H. y Denman, D. (1984) Experiencia de radio localizador CCIR codigo
N"
1(POCSAG) para desplegar mensajes de radio localizador, IEEE 1984 Conference on
Mobile Radio Systems, septiembre.
- http://www.refieq.com/braddye/Default.htm
- http://www.williamson-labs.com/48O~emc.htm