Se estudian las relaciones existentes entre el tiempo, las posiciones, las
velocidades y las aceleraciones de las diferentes partículas que forman un
cuerpo rígido. Como se verá, los diferentes tipos de movimiento de cuerpo
rígido pueden agruparse de manera conveniente en la forma que sigue
1,-Traslación.
Se afirma que un movimiento será de traslación si toda línea recta dentro del cuerpo mantiene la misma dirección durante elmovimiento. (movimiento de
traslación rectilínea
(a)
, y detraslación curvilínea (b))
2,-Rotación alrededor de un eje fijo.
En este movimiento, las partículas que forman al cuerpo rígido se mueven en planos paralelos a lo largo de círculos centrados sobre el mismo eje fijo, llamadoeje de rotación.
(a)
(b)
La rotación no debe
confundirse con ciertos tipos
de traslación curvilínea
3,-Movimiento plano general.
movimientos en los cuales todas las partículas del cuerpo se mueven en planos paralelos. Cualquier movimiento plano que no es ni una rotación ni una traslación se conoce como un movimiento plano general.4,-Movimiento alrededor de un punto fijo.
Elmovimiento tridimensional de un cuerpo rígido unido a un punto fijo O, por ejemplo, el movimiento de un
trompo sobre un piso rugoso, se conoce como movimiento alrededor de un punto fijo.
5,- Movimiento general.
Cualquier movimiento de un cuerpo rígido que no entra en ninguna de las categorías anteriores se conoce como movimiento general.En general se buscará expresar la velocidad y la aceleración de un punto dado
del cuerpo en términos de su vector de posición, de la velocidad angular y de
la aceleración angular del cuerpo, dependiendo del tipo de movimiento que se
estudie.
Considere un cuerpo rígido en traslación (ya sea rectilínea o curvilinea), y deje que A y
B
sean cualesquiera dos de sus partículas (figa).
Al denotar, respectivamente, porr
Ay
r
B los vectores de posición de A yB
con respecto a un sistema de referencia fijo ymediante
r
B/
A al vector que une a A yB,
se escribeSe diferencia esta relación con respecto a
t.
Hay que resaltar que con la definición pura de traslación, el vector rB/A debe mantener una dirección constante; su magnitud también debe ser constante, ya que A y B pertenecen al mismo cuerpo rígido. De esta forma:En consecuencia,
cuando un cuerpo rígido está en traslación, todos
lospuntos el
cuerpo tienen la misma velocidad y la misma aceleración en cualquier instante dado
(figura b y c).
Considere un cuerpo rígido que gira alrededor de un eje fijo AA'. Sea P un punto del cuerpo y r su vector de posición con respecto de referencia fijo O, (y con
z igual al eje de
rotación) ,P
debe permanecer a una distancia constante deB y
describirá el círculo de centroB
y de radio donde denota el ángulo formado por r yAA’.
La posición de
P
y del cuerpo completo está definida totalmente por el ángulo que forma la líneaBP
con el planozx.
El plano se conoce comocoordenada angular
del cuerpo y se define como positivo cuando se ve en sentido contrario al de las manecillas del reloj de A'. La coordenada angular se expresará en radianes (rad) o, en oca-siones, en grados (°) o revoluciones (rev). Recuérdese queRecuérdese, que la velocidad v =
dr/dt
de una partículaP
es un vector tangente a la travectoria deP y
de magnitud v= ds/dt.
Al observar que la longitud Δs del arco descrito porP
cuando el cuerpo gira un ángulo Δθ es:al dividir ambos miembros entre Δt, se obtiene en el límite, cuando Δ, tiende a cero:
Advierta que el ángulo
depende de la posición de
P
dentro del cuerpo, pero que la razón de cambioes en
La conclusión es que la velocidad v de P es un vector
perpendicular al plano que contiene a AA' y r, y de magnitud
v
Esto es precisamente el resultado que se obtendría al dibujar un vector a lo largo de AA’ y se formara el producto vectorial:Este vector se llama
velocidad
angular del cuerpo,
su sentido obedece la regla de la mano derecha.Y la aceleración a de la partícula P es:
y se denomina
aceleración angular del cuerpo
Al diferenciar esta ecuación y recordar que k es constante en magnitud y dirección, se tiene:
Componente tangencial de a.
Componente normal de a.
Supóngase un plano rotando entorno a O en el sentido anti-horario, w es positivo:
Como los vectores k y r son perpendiculares la magnitud v, es:
Sustituyendo
Y se observa que el doble producto cruz r por K origina una rotación de 180º del vector r, se expresa la
aceleración del punto P, como:
Descomponiendo a en las componentes tangencial y normal, se tiene:
Se afirma que se
conoce
el movimiento de un cuerpo rígido que gira alrededor de un eje fijoAA'
cuando su coordenada angular θ puede expresarse como una función conocida det.
Sin embargo, en la práctica la rotación de un cuerpo rígido rara vez se define mediante una relación entre θ y t. Con mayor frecuencia, las condiciones de movimiento se especificarán mediante el tipo de aceleración angular que posea el cuerpo. Por ejemplo, es posible que se dé como una función det,
como una función de o como una función de w, se escribe:Y se obtiene:
Con frecuencia se encuentran dos casos particulares de rotación:
1,- Rotación uniforme.
Este caso se caracteriza por el hecho que la aceleración angular es cero. Consecuentemente, la aceleración angular es constante, y lacoordenada angular está da por la fórmula:
2,-Rotación acelerada uniformemente
.
En este caso, la aceleración angular esconstante. Las siguientes fórmulas que relacio-nan la velocidad angular, la coordenada angular y el tiempo pueden obtenerse .La similitud entre las fórmulas deri-vadas aquí y aquellas obtenidas para el movimiento rectilíneo uniformemente acelerado de una
partícula es manifiesta.
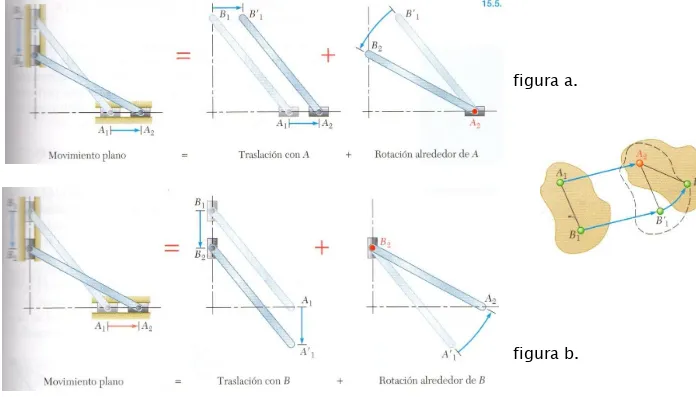
El movimiento plano general es un movimiento plano que no es ni una traslación ni una rotación. s embargo, como se verá,
un movimiento plano general siempre puede
considerarse como la suma de una traslación y una rotación.
Considere, por ejemplo, una rueda que gira sobre una pista recta. A lo largo de cierto intervalo, dos puntos dados A y B se habrán movido, respectivamente, desde A1 hasta A2 y
desde
B
1 hastaB
2.
El mismo resultado podría obtenerse mediante una traslación que llevaría a A y aB
hacia A2 yB’
1 (la líneaAB
se mantiene vertical), se-guida por unarotación alrededor de A que llevaría a
B
aB
2.
Aunque el movimiento de giro original difiere de la combinación de traslación y rotación cuando estos movimientos se toman en forma sucesiva, el movimiento original puede duplicarse de manera exacta mediante una combinación de traslación y rotación simultáneas.El movimiento puede sustituirse por una traslación en una dirección horizontal y una rotación alrededor de A (figura
a)
o por una traslación en una dirección vertical y una rotación alrededor deB
(figura b). [image:9.720.0.696.51.448.2]figura b. figura a.
El miembro del lado derecho representa una suma vectorial. La velocidad
v
Acorresponde a la traslación de la placa con A, mientras que la velocidad relativa
V
B/
Ase asocia con la rotación de la placa en torno a A y se mide con respecto a
ejes centrados en A de orientación fija. Al denotar mediante
r
B/
Ael vector de
posición de
B
relativo a A, y por
wk
la velocidad angular de la placa con
respecto a los ejes de orientación fija, se tiene de
y
Aquí se considera otra vez la varilla
AB
de la figura. Suponiendo que se conoce la velocidadv
A del extremoA, se
propone encontrar la velocidad VB del extremoB y
la velocidad angular W de la varilla, en términos de la velocidad vA, la longitud l y el ángulo. Al elegir A como un punto de referencia, se expresa que el movimiento dado es equivalente a la traslación con A y una rotación simultánea alrededor de A. La velocidad absoluta de
B
debe entonces ser igual a la suma vectorial:Si se conoce dirección de
v
B/
A,
su magnitud es desconocida. Sin embargo, esto se compensa por el hecho de que se conoce la dirección VB. Por lo tanto, es posible completar el diagrama de la figura. Al despejar las magnitudes dev
By w
se escribe:Considere el movimiento plano general de una placa. Se intenta de-mostrar que, en cualquier instante dado, la velocidad de las diversas partículas de la placa es la misma como si la placa girara alrededor de cierto eje perpendicular a su plano, el cual se conoce como
eje de rotación
instantáneo.
Este eje interseca el plano de la placa en el punto C, denominadocentro instantáneo de rotación
de la placa.Para observar cómo es posible poner en práctica el concepto de centro instantáneo de rotación considere de nuevo la varilla de la figura. Al dibujar la perpendicular a
v
A a través de A y la perpendicular av
B a través deB,
se obtiene el centro instantáneo C. En el instante considerado, las velocidades de todas las partículas de la varilla A son las mismas, como si esta última girara en torno a C. Ahora bien, si se conoce la magnitudv
A de la velocidad A, la magnitud w de la velocidad angular de la varilla puede obtenerse al escribirEsto es valido para un determinado tiempo t, para una t+Δt, el centro se habrá movido. Lo que significa que, en general, la partícula C
no tiene aceleración cero
y, por lo tanto, lasaceleraciones
de las diversas partículas de la placano pueden
determinarse como si la placa estuviera girando alrededor de C.Recordando que:
El miembro del lado derecho representa una suma vectorial. La aceleración
a
A corresponde a la traslación de la placa conA,
en tanto que la aceleración relativaA
B/A asocia con la rotación de la placa en tomo a A y se mide con respecto a los ejes centrados en A y de orientación fija. Hay que recordar que la aceleración relativaA
B/
A puede descomponerse en dos componentes, unacomponente tangencial (
A
B/
A)
t perpendicular a la líneaAB, y
unacomponente normal (
A
B/A)
n . Denotando porr
B/
A el vector de posición deB
relativo a A y, respectivamente, mediantewk
y k la velocidad angular y la aceleración angular de la placa con respecto a los ejes de orientación fija, se tieneSi se supone conocido va y aa del
punto A, se puede determinar la aceleración absoluta de B, con:
donde
(a
B/
A)
ntiene la magnitud
Iw
2y
está
dirigida hacia A,
en tanto que
(a
B
/
A)
ttiene la magnitud
l
y
es perpendicular a
AB, no
hay forma de indicar si la
componente tangencial
está
dirigida hacia la izquierda o hacia la derecha y,
por lo tanto, ambas direcciones posibles. De modo similar, se indican ambos
sentidos posibles para
a
B,
ya que no se sabe si el punto
B
se acelera hacia
arriba o hacia abajo.
La ecuación se ha expresado de manera geométrica en la figura y es posible
obtener cuatro polígonos vectoriales diferentes, dependiendo del sentido de
a
Ay
de la magnitud relativa de
a
Ay
(a
B/
A)
n.
Si se va a determinar
a
By a
de uno de
estos diagramas, no sólo se debe conocer
a
Ay
,
sino también w
.
Por
consiguiente, la velocidad angular de la varilla debe determinarse por separado
mediante uno de los métodos indicados anteriormente. Los valores de
a
By
pueden obtenerse de ese modo considerando de manera sucesiva las
componentes
x y y
de los vectores mostrados en la figura. En el caso de un
polígono
a,
por ejemplo, se escribe:
En el caso de ciertos mecanismos, es posible expresar las coordenadas x e y, de todos los puntos importantes del mecanismo por medio de expresiones analíticas simples que contienen un solo parámetro. En estos casos a veces es ventajoso determinar de manera directa la velocidad absoluta y la aceleración absoluta de los diferentes puntos del mecanismo, ya que las componentes de la velocidad y de la aceleración de un punto dado pueden obtenerse diferenciando las coordenadas x e y,de ese punto. Considerando otra vez la varilla AB cuyos extremos se deslizan, de manera
respectiva, en una corredera horizontal y en una vertical. Las coordenadas xA y yBde los extremos de la varilla pueden expresarse en términos del ángulo θ, que forman la varilla con la vertical
Al diferenciar las ecuaciones, dos veces con respecto a t, se escribe
Hay que observar que el signo positivo de vA o aA indica que la velocidad vA o la aceleración aA está dirigida hacia la derecha; un signo positivo para vB o aB indica que vB o
aB apunta hacia arriba.
Estas ecuaciones, pueden utilizarse para determinar, por ejemplo, vB y w,
cuando se conocen vA y . Sustituir. A sustituir w en estas ecuaciones, se puede determinar entonces aB y , si se conoce aA.