UNIDAD PROFESIONAL “ADOLFO LOPEZ MATEOS”
“SISTEMA DE CONTROL INALAMBRICO DE TECNOLOGIA
BLUETOOTH PARA LA ASEPSIA DE UNA GRANJA DE
AVES PARA CONSUMO HUMANO”
TESIS
QUE PARA OBTENER EL TITULO DE:
ING. EN COMUNICACIONES Y ELECTRONICA
PRESENTA:
ORTEGA JIMÉNEZ NETZAHUALCOYOTL
ASESORES:
ING. CARLOS BARROETA ZAMUDIO
TEMA DE TESIS
QUE COMO PRUEBA ESCRITA DE SU EXAMEN PROFESIONAL DEBERA DESARROLLAR EL PASANTE DE INGENIERIA EN COMUNICACIONES Y ELECTRONICA C. ORTEGA JIMENEZ NETZAHUALCOYOTL
“SISTEMA DE CONTROL INALAMBRICO DE TECNOLOGIA BLUETOOTH PARA LA ASEPSIA DE UNA GRANJA DE AVES PARA CONSUMO HUMANO”
Objetivo
Realizar el diseño y construcción de un sistema inalámbrico de comunicación, para llevar a cabo el control de la asepsia de una granja de aves para el consumo humano a implantarse en la empresa Sociedad de Solidaridad Social “Mantis Religiosa”.
En dicho tema deberán considerarse los siguientes puntos: Introducción
Planteamiento del problema Marco teórico
Características del equipo propuesto, Software y diseño del hardware del equipo a construir.
Construcción del prototipo Pruebas al sistema
Conclusión
México, D. F., __ de _________de 2012
A mis padres:
Por su incondicional apoyo para lograr esta meta en mi vida, les dedico lleno de orgullo y satisfacción este trabajo, en el cual están los frutos de sus sacrificios y noches de desvelo, por hacer de mí un profesionista.
Gracias por permitirme llegar a obtener lo que hoy en día tengo.
A mis hermanos:
A ustedes que de alguna manera contribuyeron a esta realización,
otorgándome su apoyo y comprensión en los momentos precisos de mi vida.
Mi más sincero agradecimiento.
A mis profesores:
Porque siempre que he necesitado de su ayuda, han sabido ayudarme a salir adelante. Por su apoyo y comprensión hacen que este logro tan significativo para mí, también lo consideren como suyo.
Por su amistad y confianza ofrecida.
Al I. P. N. y a la E. S. I. M. E.
Por permitirme comprender el valor del conocimiento adquirido en sus aulas y formar parte de esta honorable institución.
La técnica al servicio de la partía.
A Fertilizantes “Manchue” S. A. de C. V.:
Por apoyarme financiando este proyecto de tesis, sin ninguna condición.
Aplicando la tecnología al campo para ser competitivos.
A la Sociedad de Solidaridad Social “Mantis Religiosa”:
Por permitirme realizar este proyecto de tesis dentro de sus instalaciones y comprender que la aplicación de nuevas tecnologías contribuirá al mejor desarrollo de nuestro país y de su población.
Por la transformación del campo y la sociedad.
INDICE
INTRODUCCION AL SISTEMA DE PRODUCCIÓN DE AVES PARA
EL CONSUMO HUMANO………..……1
JUSTIFICACION. ………...………...4
CAPITULO I PLANTEAMIENTO DEL PROBLEMA………...6
I.1 LOCALIZACIÓN DE LA EMPRESA S.S.S. “MANTIS RELIGIOSA”……....6
I.2 UBICACIÓN Y DESCRIPCIÓN DE LAS NAVES DE PRODUCCIÓN..…...7
I.3 BEBEDEROS Y COMEDEROS……….………..…..9
I.3.1 AMONIACO……….………...9
I.3.2 BIOXIDO DE CARBONO……….………..10
I.3.3 HUMEDAD………...10
I.3.4 TEMPERATURA………....………...10
I.4 CORTINAS………..……….…....11
I.4.1 ESTRÉS CALORICO……….………...12
I.5 CASETAS DE AMBIENTE NATURAL………..…………...14
CAPITULO II MARCO TEORICO…..……….…………...16
II.1 COMUNICACIÓN INALAMBRICA (BLUETOOTH) 1. INTRODUCCION A LA COMUNICACIÓN INALAMBRICA (BLUETOOTH) ……….…………...….16
2. PROTOCOLO DE PILA ………...………...19
3. PROTOCOLO DE ADMINISTRADOR DE ENLACE …………...………….20
4. PROTOCOLO DE ADAPTACION O LOGICA DE CONTROL DE ENLACE L2CAP ………...……….……….….21
5. PROTOCOLO DE DESCUBRIMIENTO DE SERVICIO O SDP ….….…..21
6. PROTOCOLO DE ADMINISTRACION DE ENLACE…..………..22
7. BANDABASE..………..………...…22
II. BANDAS DE FRECUENCIA Y CANALES DE RF ………..……...24
III. DEFINICION DE CANAL ………...25
IV. RANURAS DE TIEMPO ………...……….…....25
V. MODULACION Y TASA DE BIT ……….………..…25
8. ENLACES FISICO ………..……….………...26
I. CONEXIÓN ORIENTADA SINCRONA O SCO ……….……26
II. CONEXIÓN MENOS ASINCRONA O ACL ……….…...……26
9. CANALES LOGICOS ………..………….………..27
I. CANAL DE CONTROL DE ENLACE ……….………...27
II. CANAL DE ADMINISTRACION DE ENLACE ………..………..…...27
III. CANAL DE USUARIO ASINCRONO/SINCRONO ………..…….27
IV. CANAL SINCRONO DE USUARIO US ………...…..….27
II.2 FOTOTRANSISTOR..………..……….…28
II.3 ACTUADORES (HIDRAULICOS Y NEUMATICOS)…….………...…....29
II.3.0 CÁLCULO DE LA FUERZA DE EMPUJE………….………..……....33
II.3.1 DIMENSIONANDO UN CILINDRO……….………..……....35
II.3.2 SOBREDIMENSIONAMINETO DE CILINDROS………...……...36
II.3.3 VELOCIDAD DE UN CILINDRO………….………...36
II.4 ELEMENTOS DE CONTROL ……….……….37
II.4.1 CONTACTORES ………....37
II.4.2 RELEVADORES ………...……….37
II.5 EL CONTROL EN LA MANIPULACION DE ROBOTS….………..38
II.5.1 TIPOS DE TRAYECTORIAS …………..……….………...……….39
II.5.1.1 TRAYECTORIAS PUNTO A PUNTO ………..…...……39
II.6 SUBSISTEMAS ………...…..40
II.6.1 TRANSMISIONES ………....……….41
II.6.2 SENSORES ………...………42
CAPITULO III CARACTERÍSTICAS DEL EQUIPO PROPUESTO,
SOFTWARE Y DISEÑO DEL HARDWARE DEL EQUIPO
A
CONSTRUIR
……….44
III.0 CARACTERISTICAS DEL EQUIPO PROPUESTO……….…….44
III.1 DISEÑO DEL SOFTWARE ………..…….46
III.1.1 MODO DE FUNCIONAMIENTO PRELIMINAR ………..……...……50
III.1.2 SOFTWARE TRANSMISOR ………...…………...…..50
III.2 DISEÑO DEL HARDWARE ………...…...50
III.2.1 ELECCION DEL MODULO INALAMBRICO DE BLUETOOTH….…….51
III.2.2 ELECCION DEL MICRO CONTROLADOR ………..…………....….51
III.2.3 ELECCION DEL DIRECCIONADOR ………...……...52
III.2.4 ELECCION DE LOS INVERSORES ………...53
III.2.5 CONEXIÓN FINAL DEL RECEPTOR ………..………54
III.2.6 DETECTOR DE HECES ……….…...55
III.2.7 CONTROLADOR DE TEMPERATURA ……….…………...…..62
III.2.8 DISEÑO DEL SISTEMA TRANSPORTADOR DE HECES..……….63
III.2.9 CEPILLO LIMPIADOR ……….………...64
III.2.10 DISEÑO DEL CARRITO RECOLECTOR ……….…………...…...65
III.2.11 DISEÑO DEL ESTRACTOR TIPO TURBINA ………....66
III.2.12 DISEÑO DE LA ESPATULA LIMPIADORA ………...….67
III.2.13 DISEÑO DEL ACTUADOR NEUMATICO ………..….67
III.2.14 DISEÑO DE LA VALVULA CONTROLADORA DEL ACTUADOR NEUMATICO….……….…....71
III.2.15 MODO DE FUNCIONAMIENTO GENERAL ………72
CAPITULO IV CONSTRUCCION DEL PROTOTIPO
……….……..75IV.1 CONSTRUCCION DE LOS VENTILADORES ……….……....75
IV.4 MONTAJE DE COMPONENTES DEL EQUIPO RECEPTOR…………..78
IV.5 CONSTRUCCION DE LA CANALETA TIPO V ………79
IV.6 ACOPLAMIENTO DEL MOTOR DE CD AL CEPILLO LIMPIADOR DE NAVAJA ………..……...79
IV.7 CONSTRUCCION DEL ACTUADOR NEUMATICO ………...…….79
IV.8 MONTAJE DE LA BANDA TRANSPORTADORA DE HECES ………..81
IV.9 MONTAJE DE COMPONENTES DE LA TARJETA CONTROLADORA DE TEMPERATURA ……….…………..………..81
IV.10 MONTAJE DEL SENSOR DE TEMPERATURA …………...………..….82
IV.11 MONTAJE DE RODILLOS CON EL MOTOR DE CA ………...….82
CAPITULO V PRUEBAS AL SISTEMA
….………...…...83CONCLUSION……….…..86
SUGERENCIA……….…..89
S0.0 EL PUERTO SERIE RS232……….89
S0.1 BAUDIO………...91
S0.2 NIVELES LÓGICOS RS232……….91
S0.3 FORMATO DE UN BYTE……….92
S0.4 MAX 232………..94
S0.5 CONEXIÓN PUERTO RS232 Y NUESTRO MICROCONTROLADOR……96
S0.6 SISTEMA PARA CONTROL DEL PROTOTIPO UTILIZANDO RS232…..98
S0.7 RESULTADOS DE LA IMPLEMENTACIÓN POR COMUNICACIÓN ALÁMBRICA MEDIANTE RS232………..…..98
BIBLIOGRAFIA………...99
GLOSARIO DE TERMINOS……….……100
APENDICE 1………...111
APENDICE 2………...113
APENDICE 3………...121
Objetivo particular
Realizar la limpieza de charolas y el acondicionamiento de la temperatura en forma automatizada de las naves de producción de aves para el consumo humano
a través de un sistema inalámbrico de comunicación, recibiendo instrucciones por un canal de comunicación basado en la tecnología Bluetooth Roving Networks,
INTRODUCCIÓN AL SISTEMA DE PRODUCCIÓN DE AVES PARA EL
CONSUMO HUMANO
La necesidad de desarrollar sistemas confiables para el mantenimiento de las instalaciones de codornices en México ha sido parte primordial para lograr el desarrollo adecuado de la avicultura, ya que a través del tiempo el mantenimiento se realiza en forma tradicional, es decir se utilizan naves improvisadas, en las cuales se colocan las aves a pleno piso y su sistema de ventilación se realiza a base de cortinas que se enrollan en algunos casos de forma inadecuada, provocando un desbalance en la temperatura interior de las naves de producción de codornices o con motores de corriente alterna que no tienen precisión al subir o bajar las cortinas de las naves, aprovechando estos errores se ha logrado desarrollar sistemas con interfaz abierta y de bajo costo para facilitar el control inalámbrico de dispositivos de limpieza sin la utilización de cables; además las empresas han experimentado a través del tiempo la incomodidad que surge cuando se tienen equipos que utilizan conectores periféricos, teniendo como consecuencia un sinfín de cables que pueden confundir al personal no capacitado esto hace difícil el control de los equipos y su mantenimiento.
el respaldo de la industria informática, de telecomunicaciones y por la SCT (Secretaría de comunicaciones y transporte), lo que en cierta medida garantiza su utilidad. Con ello los dispositivos que incorporan tecnologías inalámbricas de Bluetooth se reconocen y se hablan de la misma forma que lo hace una computadora y una impresora, el canal permanece abierto y no requiere la intervención directa y constante del usuario cada vez que se requiera enviar un comando.
El bajo precio que se espera alcancen los productos que tienen incorporado módulos de bluetooth entorno a los $600.00 y $950.00 actuales, hará que su inclusión en cualquier dispositivo suponga un bajo costo para el fabricante y las empresas que quieran desarrollar sistemas de diversos tipos, como es el caso del diseño de sistemas de mantenimiento y control robotizado para de naves en las cuales se tiene producción a gran escala de codornices, en donde se incluyen de igual manera las computadoras, los actuadores de control y la tecnología de sensores que ha contribuido a flexibilizar los mecanismos autómatas para desempeñar tareas dentro de las industrias, ellos marcan diversos factores que intervinieron para que se desarrollaran los primeros robots en la década de los 50´s del siglo pasado.
El desarrollo de estos sistemas robotizados para las industrias de producción de aves para el consumo humano, han sido de gran importancia ya que contribuyen de forma óptima al desarrollo y crecimiento de la empresa maximizando su producción, además la potencialidad estructural de los robots de ejecutar tareas diversas y/o ejecutar una misma tarea de forma diversa, impone a los robots una estructura mecánica de geometría variable, lo que significa que un robot debe, por sí solo, alcanzar su objetivo a pesar de las perturbaciones imprevistas del entorno a lo largo de la ejecución de su tarea.
En primer lugar las industrias debe saber si se va a tener el ciclo completo o solo parte de una etapa productiva, es decir que solo se lleve cabo la primera etapa de la reproducción que es cuando las aves tienen las dos primeras semanas de vida y la segunda cuando estas ya han cumplido todo su crecimiento que es de 7 semanas listas para enviarlas a canal, dependiendo de lo anterior se pueden construir naves con nuevos sistemas de mantenimiento con tecnologías modernas inalámbricas o acondicionar las naves si ya se cuenta con ellas, de esta manera se pueden optimizar los recursos materiales para lograr tener una instalación de producción a la vanguardia y con tecnología de punta, es decir utilizar tecnología más especializada para lograr el control rápido y económico de los sistemas de limpieza y ventilación de las naves de producción.
JUSTIFICACIÓN
En México existen 9 especies diferentes de codornices que se distribuyen en 3 regiones del país (norte, bajío y centro), la mayoría de estas son silvestres sin en cambio en nuestro país se introdujo de Europa una especie de codorniz japonesa
(coturnix coturnix japónica), especializada en la producción de huevo y es la que más
se ha difundido a lo largo del territorio nacional, más tarde la coturnix coturnix
coturnix ingreso a nuestro país, que es especializada en la producción de carne,
ahora bien sabemos que la sociedad mexicana no tiene la cultura de consumir huevo y carne de esta ave, sin embargo hay una empresa social que desde hace más de 12 años ha estado produciendo y distribuyendo la carne y el huevo en el municipio de Tlapa de Comonfort Gro., y sus alrededores.
La empresa a la que nos referimos es una organización social denominada Sociedad de Solidaridad Social “Mantis Religiosa”, por lo cual este proyecto que se va a hacer tiene como objetivo agilizar la limpieza de las charolas de las jaulas donde se encuentran las aves, así como el control de la temperatura esto con el fin de aminorar los procesos provocados por el almacenamiento de las heces, el acumulo de gases (NH3, CO2, etc.) que en niveles altos son nocivos para la salud del ave y el personal.
a una intoxicación por gases, en este lapso se tiene que detectar procesos (fisiológicos, conductuales, respiratorios, digestivos, nerviosos, etc.).
CAPITULO I PLANTEAMIENTO DEL PROBLEMA
I.1 Localización de la empresa S.S.S. “Mantis Religiosa”
La S.S.S. Mantis Religiosa se encuentra ubicada en la región de la Montaña Alta de Guerrero, con una altitud de 1200msnm, clima seco con lluvias en verano, vegetación selva baja espinosa caducifolia, ver figura 1.1.1.
Figura 1.1.1.- Empresa S.S.S. “Mantis Religiosa”.
Figura 1.1.2.- Naves de producción.
I.2 Ubicación y descripción de las naves de producción.
La primera nave se ubica de norsureste; las otras dos están colocadas de este-oeste. La ubicación es muy importante ya que conforme van pasando las horas a lo largo del día, la temperatura varia puesto que al amanecer los rayos del sol dan de frente a las naves y en la tarde pega directamente a los costados.
Debido a que se va aprovechar lo ya construido daremos las medidas de las naves así como de los equipos que se utilizan, ver anexo 1.
tenga que hacer limpieza; aunque no hay inclinación como se marca para una granja de cualquier tipo explotación animal que es de al menos de 1 grado de inclinación.
Las otras dos naves tienen el siguiente aspecto, ver anexo 2:
Las ventanas son de malla ciclónica, también tiene el mismo espesor de 10cm de piso, no hay linternilla, se sabe que una nave a partir del 12m de ancho debe tener linternilla para poder dejar escapar el aire caliente, estas dos naves están en medio de 2 lomas.
Ahora bien hablemos de las jaulas, ver anexo 3. Estas son de alambre galvanizado con pendiente de 1%, todas son iguales en todas las etapas reproductivas, la abertura que hay en el piso es de 1 cm2, la forma en que se tienen colocadas las jaulas es en baterías, 4 jaulas de en cada uno de los compartimentos de una estructura hecha de tubos de acero galvanizado, ver figura 1.2.
I.3 Bebederos y comederos.
Los comederos y bebederos son de canal de 90cm de largo, no automático, el alimento se sirve manualmente igual que el agua de bebida, las charolas son de lámina galvanizada y está en cada una de las jaulas distribuidas en ambos lados.
I.3.1 Amoniaco.
Ahora hablaremos del gas que se acumula por una mala ventilación, humedad, temperatura y desechos como las heces.
El amoniaco (NH3) es el gas que ocasiona los problemas más graves; se produce por la degradación bacteriana de aquellos compuestos que contiene la codorniaza (excremento), como el nitrógeno. Tanto el calor como la humedad también son factores que contribuyen a la aceleración de esta transformación, ver tabla 1.
Niveles de amoniaco Efectos que presentan las codornices.
10ppm Son detectables por el olfato. 15ppm Irritación y escozor de los ojos.
40ppm Inflamación ocular→ ulceración dela conjuntiva de los codornipollos y las codornices adultas.
70ppm Disminuye el consumo de alimento 5% durante el desarrollo de los codornipollos. 90ppm Disminuye el consumo de alimento 5%
durante el crecimiento de los codornipollos. 100ppm Reducción brusca del apetito, crecimiento y
ritmo respiratorio tanto de las codornices adultas como de los codornipollos.
codornices durante 2 semanas.
500ppm Dosis letal.
Tabla 1. Niveles de amoniaco
I.3.2 Bióxido de carbono.
El bióxido de carbono (CO2) se encuentra en el aire atmosférico, al igual que en parte de las heces almacenadas, este exceso provoca enfermedades como producción de hongos y ascitis en las aves, por lo cual necesitamos un sistema de arrastre que ayude a la limpieza de charolas de forma automática e inalámbrica ya que con esto se lograría la disminución de los diferentes tipos de gases que se emiten durante el almacenamiento de heces.
I.3.3 Humedad.
La humedad en la cama predispone a las enfermedades (gripe aviar), además tiende a aumentar los malos olores como el amoniaco y provoca la proliferación de las moscas así como el fomento en la producción de hongos ya que en condiciones normales un ave elimina más de 200g de hum/kg de peso vivo por concepto de transpiración, excremento y por el derrame de agua de los bebederos.
I.3.4 Temperatura.
La ventilación en una nave es muy importante porque abastece de oxígeno a las aves, esto ayuda a saca el aire viciado como en amoniaco y el bióxido de carbono, además de que se elimina el exceso de humedad. La ventilación mínima necesaria para eliminar el aire viciado debe ser: en invierno 19 litros de aire/min/kg de peso vivo a una temperatura de entre 0-10ºC, y en verano 30 litros de aire/min/kg de peso vivo a una temperatura de entre 25-30ºC.
I.4 Cortinas.
Para obtener una buena ventilación existen dos procedimientos primarios:
Por medios mecánicos, mediante ventiladores con entradas adecuadas para el aire,
Por gravedad, donde el aire entra a la caseta por entre las aberturas laterales en las
paredes y se elimina a través de la linternilla del techo ya que cuanto mayor sea la diferencia de temperatura entre el exterior y el interior de la caseta, más sencillo será debido a que entre otras causas; el aire caliente es menos denso que el frio.
Las naves que tiene la organización (S.S.S Mantis Religiosa), son de ambiente natural, por lo que se pueden utilizar materiales muy variados, para utilizarlos como ventanas, como los siguientes:
1.- metálicas (en forma de persiana) 2.- fibra de vidrio (en forma de guillotina) 3.- lona (manta).
4.- plástico (polietileno) es muy económico, aunque no dura más de un año.
Figura 1.4.1.- Vista de las cortinas de ventilación.
Aunque la caseta está dentro de lo especificado en cuanto a medidas la altura no es la adecuada ya que se ha visto que las aves sufren de estrés calórico.
I.4.1 Estrés calórico.
La temperatura interna de las aves en general fluctúa en los 41 grados centígrados esta temperatura se eleva levemente a 42 grados durante el día y disminuye levemente a 40 grados durante la noche, por lo que un aumento en la temperatura corporal a 47 grados sería letal, pero si el inicio del estrés por calor es repentino, a 45 grados aumenta la mortalidad.
constante, pero es esencial que cualquier exceso de calor se elimine en el ambiente, así cuando está relativamente fresco la temperatura de la caseta es de aproximadamente de 25°C, por lo cual la perdida de calor es posible a través de la radiación, convección, conducción y evaporación de agua a través de la piel del ave.
Cuando la temperatura ambiental se aumenta, es evidente un cambio en la postura del ave, las alas se encuentran alejadas del cuerpo de manera que puedan eliminar calor por las áreas menos emplumadas o desplumadas de la parte inferior del cuerpo. Se aumenta el consumo de agua, se limita el nivel de actividades para disminuir la cantidad de calor producido por actividad muscular, y el consumo de alimento se reduce para disminuir la carga de calor del ave.
A temperaturas internas de la caseta de 32°C o mayor, la ingesta de alimento comienza a tener un efecto negativo sobre la producción. A temperaturas de 38°C y 39°C algunas aves estarán acostadas en el piso o la jaula, postradas y boqueando, ver figura 1.4.1.1.
El estrés por calor puede involucrar:
1.- Menor ingesta de alimento. 2.- Mayor consumo de agua.
3.- Disminución en el peso del huevo. 4.- Disminución en la postura.
5.- Fertilidad reducida.
6.- Disminución en la calidad del codornipollo. 7.- Mayor susceptibilidad a enfermedades. 8.- Muerte.
Otro de los problemas que se ha observado es que la posición de la nave no es la ideal pues al salir el sol y antes de ponerse u ocultarse le pegan directamente los rayos a las codornices, ya que no hay una barreara natural y/o artificial que impida la entrada de corrientes de aire y sol.
I.5 Casetas de ambiente natural.
Cuando se construye una caseta nueva, es muy importante considerar que no entre la luz directa y que se oriente de acuerdo a los vientos dominantes y a la topografía del lugar. Si la orientación relativa al sol no es la ideal entonces es posible proteger con sombra adicional sembrando árboles, cuidando que no se interfiera con la ventilación. Además de controlar el calor, la reducción de la intensidad de la luz puede contribuir a controlar mejor los padrones de luz para regular el inicio de la producción de huevos por parte de las codornices. Toda la vegetación se debe mantener muy corta alrededor de la caseta de tal manera que permita la ventilación adecuada, las casetas deben tener muros abiertos, ver anexo 4.
temperatura en el nivel de las aves, por la radiación proveniente del techo, ver anexo 5.
Como se sabe el aire y el sol son muy importantes ya que el primero se encarga de desalojar el aire viciado dentro de la caseta, el segundo es esencial para la transformación de la vitamina D el 2α D-hidrocolecalciferol ya que una de sus funciones es la fijación de calcio tanto en las aves como en huevo.
CAPITULO II MARCO TEÓRICO
II.1 COMUNICACIÓN INALAMBRICA (BLUETOOTH)
1. Introducción a la comunicación inalámbrica (Bluetooth)
A través del tiempo las comunicaciones por medios físicos han tenido un auge considerable, sin embargo debido a que existen logares en los cuales no es muy accesible implantar una red cableada se han optado por otros medios de comunicación que ayuden a estas redes a tener acceso, para lo cual se necesitaba una tecnología especial basada en radiofrecuencia, pero con características y comportamiento de una red física, con ello en 1994 Comunicaciones Móviles de Ericsson empezó un estudio acerca de remplazar los cables que utilizaba para unir a sus móviles con sus accesorios, esto debido a que un sistema de radio no necesita línea de vista, a diferencia de los sistemas infrarrojos que estaban disponibles en el momento. Bluetooth toma su nombre de Harald Blatent, donde Blatand es danés para Bluetooth. Bluetooth fue lanzado como un estándar de licencia gratuita en mayo de 1998 por SIG o Special Interest Group, en la que se basa el estándar IEEE 802.15.1 (Standard for Wireless Personal Area Networks adapted from the Bluetooth specification), que estaba integrado por Ericsson, IBM, Intel, Nokia y Toshiba. Después llegaron, entre otras, 3Com, Motorola, Sony, Compaq, Hewlett Packard y Microsoft, y se convirtieron en empresas que firman un acuerdo de licencia sin costo para poder desarrollar productos con tecnología Bluetooth, actualmente el SIG está compuesto por 1400 empresas. El SIG lanza Bluetooth con el fin de eliminar los cables en algunos dispositivos. Está basado en una tecnología de radio de corto alcance para proveer servicios sencillos.
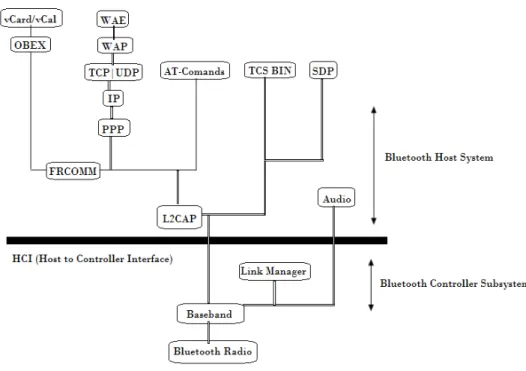
Uno de los principales objetivos de Bluetooth es permitir a dispositivos de muchos fabricantes trabajen entre sí y para llegar a este objetivo Bluetooth no solo definió un sistema de radiocomunicación, también definió una especificación de software para que un dispositivo utilizando Bluetooth sea capaz de encontrar a otro que esté en su área de cobertura, identificar sus servicios y tener la capacidad de utilizarlos, ver figura 2.1.1.1.
Figura 2.1.1.1.- Capas que componen la tecnología Bluetooth.
Potencia
Clase de potencia Potencia máxima de salida (Pmax) Potencia nominal de salida Mínima potencia de salida Potencia de control 1 100mWatt (20dBm)
N/A 1mW (0dBm) Pmin<+4dBm a Pmax.
Opcional: Pmin2a Pmax 2 2.5mW (4dBm) 1mW (0dBm) 0.25mW
(-6dBm)
Opcional: Pmin2a Pmax 3 1mW (0dBm) N/A N/A Pmin2a Pmax
Figura 2.1.1.2.- Niveles de potencia del equipo de transmisión.
Dado lo reducido del circuito integrado, que va a ir incorporado en los dispositivos portátiles y alimentados con baterías, es que tenga un consumo de potencia muy reducido (hasta un 97% menos que un teléfono móvil). Si los dispositivos Bluetooth no intercambian datos, entonces establecen el modo de “espera” para ahorrar energía, quedando a la escucha de mensajes. La Potencia de transmisión que se usa como especificación es de 1 mW para un alcance de 10 m, 100 mW para un alcance de hasta 100 m,
Alcance
Modulación
Los datos transmitidos poseen una velocidad de 1 Mega símbolo/seg. Una modulación GFSK (Gaussian Frequency Shift Keying) es usada, en donde un “1″ binario representa una desviación de frecuencia positiva, y un “0″ binario representa una desviación de frecuencia negativa. La desviación máxima de frecuencia está entre 140 KHz y 175 KHz. La modulación se ilustra en la figura 2.1.1.3.
Figura 2.1.1.3.- Una modulación GFSK (Introducción por cambio de frecuencia Gaussiana)
2. Protocolo de pila
El protocolo de pila es el encargado de proporcionar la información necesaria de acuerdo al tipo de moduló de bluetooth con que se cuente, así si dentro del desarrollo del software estuvo involucrado el grupo de interés especial se puede dividir en 4 capas para ver que protocolos se utilizaran, ver tabla 2.
Capa del Protocolo Protocolos
Protocolos Adaptados PPP, UDP/TCP/IP, OBEX, WAP, vCard, vCal, IrMC, WAE.
Tabla 2. Protocolo de pila
Los protocolos del núcleo de Bluetooth comprenden exclusivamente protocolos desarrollados por el SIG. Los protocolos RFCOMM y TCS binario también fueron desarrollados por SIG, sin embargo, estos estaban basados en ETSI TS 07.10 y la recomendación ITU-T Q.931. La mayoría de los dispositivos Bluetooth necesitan para un correcto funcionamiento los protocolos del núcleo de Bluetooth, mientras que el resto de los protocolos se utilizan mientras sean necesarios.
Juntos, la capa de reemplazo de cables, de control de telefonía, y la capa de protocolos adoptados forma protocolos orientados a aplicaciones habilitando aplicaciones para correr sobre los protocolos del núcleo.
La banda base y la capa de control de enlace habilita el enlace físico de RF entre las
unidades de Bluetooth formando una pico red. Como el sistema de Bluetooth de RF es un sistema de espectro extendido con saltos de frecuencia, esta capa utiliza voceos para sincronizar las transmisiones saltos de frecuencias y secuencias de reloj de los diferentes dispositivos de Bluetooth.
Provee diferentes tipos de enlaces físicos con sus correspondientes paquetes en
banda base, conexión síncrona orientada y connectionless asíncrona que puede ser
transmitido de una manera multiplexada por el mismo enlace de RF. Paquetes de ACL se usan para datos únicamente, mientras el paquete SOC puede contener audio solo o combinado con datos. Los distintos tipos de datos, incluyendo enlace de administración y mensajes de control, todos son colocados en un canal especial.
3. Protocolo de administrador de Enlaces (LMP)
y control del tamaño de los paquetes de banda base. Este protocolo también tiene por función controlar los modos de potencia y los ciclos de trabajo del dispositivo Bluetooth, y los estados de la conexión de una unidad Bluetooth en una picored.
4. Protocolo de Adaptación o lógica de control de enlace L2CAP
Este protocolo adapta los protocolos de las capas superiores sobre la banda base.
Se puede pensar que este trabajaría en paralelo con LMP, sin embargo, L2CAP provee de servicios a las capas superiores cuando la carga de datos nunca es enviada por los mensajes de LMP. Se puede transmitir hasta 64 kbits en longitud.
5. Protocolo de Descubrimiento de servicios (SDP)
Este protocolo provee los medios necesarios para que aplicaciones descubran que servicios se encuentran disponibles y determinar las características de dichos servicios.
Algunos de los requisitos de éste protocolo son:
-SDP debe ser capaz de buscar servicios basados en la clase de servicios.
-SDP debe permitir que se descubran servicios basados en las clases de servicios. -Debe permitir la búsqueda sin conocimiento previo de las características específicas de los servicios.
-Debe proveer los medios necesarios para que cuando un dispositivo entre en la cobertura de RF de otro, pueda descubrir los servicios de éste, o si un dispositivo ya detectado agrega servicios ser capaz de descubrirlos.
Funcionamiento de SDP, se muestra como un dispositivo siempre será el cliente y
Figura 2.1.5.1.- Protocolo de descubrimiento de servicios (SDP).
-SDP involucra comunicación entre cliente y servidor como se explicó anteriormente, cada servidor mantiene registros de sus servicios junto con sus características, estos pueden ser consultados mediante una solicitud SDP. Si un cliente o una aplicación deciden utilizar un servicio, éste debe abrir una conexión independiente para utilizar el servicio, SDP solo es el mecanismo para descubrir los servicios, el enlace no es parte de SDP. Solo puede existir un servidor SDP por un dispositivo Bluetooth, cada dispositivo puede actuar como cliente y servidor.
6. Protocolo de Administración de Enlaces o Link Manager
Protocolo.
Los mensajes LMP se utilizan para preparar el enlace, el control y la seguridad. Estos mensajes se filtran y se interpretan por LM en el receptor, y por lo tanto, no se propagan a capas superiores. Los mensajes de este protocolo son prioritarios y no deben ser retrasados por tráfico de la capa L2CAP.
7. Banda base
i. Canal Físico
binaria. La tasa de símbolo es de 1Mega símbolo/segundo se utiliza un canal ranurado con una duración de 625 micro segundo. Para una transmisión dúplex, se utiliza un esquema por división de tiempo TDD, en el canal la información se intercambia en forma de paquetes, cada paquete se envía en una diferente frecuencia de salto, normalmente un paquete comprendo una sola ranura, aunque puede abarcar hasta 5 ranuras de tiempo.
El protocolo utiliza una combinación de conmutación de circuito y de paquetes.
Las ranuras pueden estar reservadas para paquetes síncronos. Bluetooth soporta un canal de datos asíncronos, hasta 3 canales síncronos de voz, o un canal con datos asíncrono y voz síncrona. Cada canal de voz soporta una tasa de 64 kilo bits por segundo en cada dirección. El canal asíncrono puede soportar 723.2 kilo bits por segundo asimétricos y 433.9 kilo bits por segundo simétricos.
El sistema consiste en una unidad de radio, una unidad de control de enlace, y una de administración de enlace, ver figura 2.1.7.1.
Figura 2.1.7.1.- Componentes de un sistema Bluetooth
Múltiples pico redes con áreas que se traslapan forman una scatternet. Cada picored tiene un solo maestro, esclavos pueden participar en diferentes redes. Cada picored utiliza un canal de saltos, un esclavo en una picored puede ser maestro de otra y viceversa, ver figura 2.1.7.2.
Figura 2.1.7.2.- Esquema maestro-esclavo. ii. Bandas de Frecuencia y canales de RF
Bluetooth opera en la banda de los 2.4GHz, mundialmente ésta puede diferir dependiendo de lo que esté disponible. En los Estados Unidos de America y Europa, una banda de 83.5 MHz se encuentra disponible. En esta banda, se ubicaron 79 canales de RF espaciados por 1MHz. En Japón, España, y Francia es un ancho de banda menor en el cual se utilizan 23 canales de RF, igualmente el espacio entre canales es de 1MHz, ver tabla 3.
País. Rango de
Frecuencia.
Canales de RF.
Europa y E.U.A. 2400 – 2483.5 MHz
F=2402+k MHZ K=0,…78 Japón 2471 – 2497 MHz F=2473+k MHZ K=0,…22 España 2445 – 2475 MHz F=2449+k MHZ K=0,…22 Francia 2446.5 – 2483.5
MHz
F=2454+k MHZ K=0,…22
iii. Definición de canal
Es el medio de transmisión por el cual viajan las señales portadoras de información que se van a intercambiar entre un emisor y un receptor.
En la tecnología Bluetooth un canal está representado por una secuencia de salto pseudo-aleatoria por los canales disponibles en el sistema. La secuencia de salto es única para cada picored, la fase en la secuencia está determinada por el reloj en el maestro. Cada canal se encuentra dividido en ranuras de tiempo, cada ranura corresponde a una frecuencia de salto. La tasa nominal de salto es de 1600 saltos por segundo. Todas las unidades Bluetooth que participan en una picored están sincronizadas en tiempo y en salto con el canal.
iv. Ranuras de tiempo
Cada ranura de tiempo en Bluetooth tiene una duración de 625µs. cada ranura tiene un número de acuerdo con el reloj maestro. En las ranuras de tiempo, tanto el maestro y los esclavos pueden transmitir paquetes.
Los paquetes que transmite el maestro tienen que ir por ranuras pares, los esclavos en ranuras de nones. El inicio del paquete tiene que coincidir con el inicio de la ranura. Sin embargo los paquetes pueden abarcar hasta cinco ranuras de tiempo.
v. Modulación y tasa de bit
representa mediante la desviación negativa de frecuencia. La mínima desviación de frecuencia debe estar entre 140kHz y 175kHz.
8. Enlaces Físicos
i. Conexión orientada síncrona (SCO)
El enlace SCO es simétrico, un enlace punto a punto entre maestro y un esclavo específico. El enlace SCO reserva ranuras de tiempo, por esto se puede considerar como una conexión de conmutación de circuitos entre maestros y esclavos. En esta conexión se envía información dependiente de tiempo, un maestro puede tener hasta 3 enlaces SCO (SCO synchronous connection-oriented), un esclavo igualmente puede tener tres con el mismo maestro o dos si estos son diferentes. Los paquetes que utilizan éste enlace no pueden ser retransmitidos. El maestro transmitirá éste tipo de paquetes a intervalos regulares, en las ranuras reservadas para éstas transmisiones. Para establecer este enlace, el maestro envía un mensaje para la preparación SCO vía el protocolo de administración de enlace. Éste mensaje contiene información acerca del intervalo en el que transmite el maestro y el offset que especifica las ranuras reservadas para ésta transmisión.
ii. Conexión menos asíncrona o Asynchronus connection-less (ACL)
En las ranuras de tiempo no reservados para SCO, este tipo de enlace provee una conexión por conmutación de paquetes entre el maestro y todos los esclavos que participan en la picored. Entre un maestro y un esclavo solo puede existir una conexión de este tipo.
esclavo en particular se consideran como broadcast y todos los esclavos leen ese paquete. Si no se requiere enviar información éste enlace no tiene que estar en operación.
9. Canales lógicos
i. Canal de control de enlace o Link control channel
El canal LC se mapea al paquete de cabecera. Este canal lleva información de control de enlace de bajo nivel como ARQ, control de flujo, y caracterización de la carga, este canal aparece en todos los paquetes, a excepción del paquete de identidad que no lleva cabecera.
ii. Canal de administración de enlace o Link manager channel
Este canal carga información de control intercambiada entre los administradores de enlaces del maestro y el o los esclavos. Normalmente, este canal utiliza paquetes protegidos.
iii. Canal de usuario asíncrono/síncrono
El canal UA lleva la información asíncrona de usuario de la capa L2CAP. Esta información puede ser transmitida en uno o más paquetes de banda base. El canal UI lleva información cuyo tiempo se da en las capas superiores.
iv. Canal síncrono de usuario (US)
Este canal llevara información transparente síncrona de usuario, va a través del enlace SCO.
canales se mapean en paquetes ACL. Los canales LM, UA y UI pueden interrumpir al canal US si éstos llevan información de una prioridad mayor.
II. 2 FOTOTRANSISTOR
Un fototransistor al igual que un transistor común basa su funcionamiento en el paso de la corriente del colector al emisor, con la diferencia que el transistor puede trabajar de 2 formas:
1. puede operar como transistor normal con la corriente de base (Ib) en modo común.
2. Si se utiliza como fototransistor, cuando la luz que incide en este elemento hace las veces de corriente de base Ip (modo de iluminación).
Figura 2.2.1.- Símbolo del fototransistor
Puede utilizarse de las dos en formas simultáneamente, aunque el fototransistor se utiliza principalmente con el pin de la base sin conectar.
Ib = 0.
Si nuestro propósito es la de aumentar la sensibilidad del transistor, debido a la baja iluminación, se puede incrementar la corriente de base Ib, con ayuda de polarización externa.
Para obtener un circuito equivalente de un fototransistor, basta agregar a un transistor común un fotodiodo, que conectaremos entre la base y el colector, conectando el cátodo del fotodiodo al colector del transistor y el ánodo a la base, y ya tenemos un fototransistor, ver figura 2.2.2.
Figura 2.2.2.- Circuito equivalente de un fototransistor.
De este modo como el fotodiodo, tiene un tiempo de respuesta muy corto, pero con una entrega de corriente mayor que la del transistor, entonces la corriente que entrega el fotodiodo circula hacia la base del transistor y se amplifica β veces, además esa es la corriente que puede entregar el fototransistor una vez modificado. El fototransistor se utiliza en aplicaciones donde la detección de iluminación es muy importante.
II.3 Actuadores hidráulicos y neumáticos
El proceso bajo control, la acción que se tiene que llevar a cabo y la velocidad con que ésta deba realizarse, son factores que influyen en la clase de actuador que se ha de utilizar. Generalmente se consiguen tres tipos de actuadores: los hidráulicos, los eléctricos y los neumáticos.
En este caso en particular veremos el funcionamiento de los sistemas hidráulicos y neumáticos.
En los sistemas hidráulicos y neumáticos la energía es transmitida a través de tuberías. Esta energía es función del caudal y presión del aire o aceite que circula en el sistema.
Una de las características destacables de los sistemas de potencia fluidos es que la fuerza, generada por la fuente fluida, controlada y dirigida por válvulas convenientes, y transportada por las líneas, puede ser convertida fácilmente a casi cualquier clase de movimiento mecánico deseado en el mismo lugar que sea necesario.
Sea tanto movimiento lineal (línea recta) como rotatorio, éste puede ser obtenido usando un dispositivo de impulsión conveniente. Un actuador es un dispositivo que convierte la potencia fluida en fuerza y movimiento mecánicos.
Los cilindros, los motores, y las turbinas son los tipos más comunes de dispositivos de impulsión usados en sistemas de potencia fluida.
Un cilindro actuador es un dispositivo que convierte la potencia fluida a lineal, o en
línea recta, fuerza y movimiento. Puesto que el movimiento lineal es un movimiento
hacia adelante y hacia atrás a lo largo de una línea recta, este tipo de actuadores se conoce a veces como motor lineal.
"motores lineales".
El cilindro consiste en un émbolo o pistón operando dentro de un tubo cilíndrico. Los cilindros actuadores pueden ser instalados de manera que el cilindro esté anclado a una estructura inmóvil y el émbolo o pistón se fija al mecanismo que se accionará, o el pistón o émbolo se puede anclar a la estructura inmóvil y el cilindro fijado al mecanismo que se accionará. Los cilindros actuadores para los sistemas neumáticos e hidráulicos son similares en diseño y operación.
Algunas de las variaciones de los cilindros tipo émbolo y tipo pistón de impulsión son:
El cilindro es el dispositivo más comúnmente utilizado para conversión de la energía antes mencionada en energía mecánica. Un cilindro actuador en el cual la superficie transversal del pistón es menos de una mitad de la superficie transversal del elemento móvil se conoce como cilindro tipo pistón.
Este tipo de cilindro se utiliza normalmente para aplicaciones que requieran funciones tanto de empuje como de tracción.
El cilindro tipo pistón es el tipo más comúnmente usado en los sistemas de potencia fluida. Las partes esenciales de un cilindro tipo pistón son un barril cilíndrico o camisa, un pistón y un vástago, cabezales extremos, y guarniciones convenientes para mantener el sellado. Los cabezales se encuentran fijados en los extremos de la camisa.
El cabezal del extremo contrario de la mayoría de los cilindros está provisto de un vínculo mecánico para asegurar el cilindro actuador a algún tipo de estructura. Este cabezal extremo se conoce como el cabezal de anclaje.
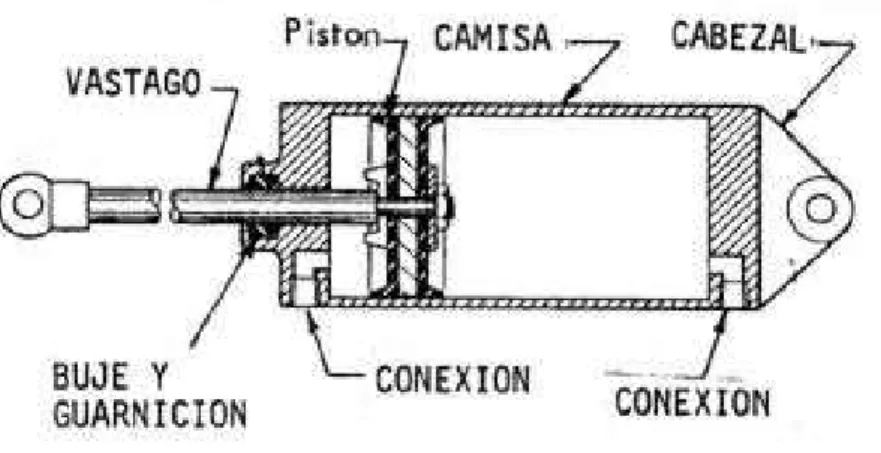
En la figura 2.3.1, vemos un corte esquemático de un cilindro típico. Este es denominado de doble efecto por que realiza ambas carreras por la acción del fluido.
Figura 2.3.1.- corte esquemático de un cilindro típico
Las partes de trabajo esenciales son:
1) La camisa cilíndrica encerrada entre dos cabezales, 2) El pistón con sus guarniciones, ver anexo 6, y 3) El vástago con su buje y guarnición.
vínculo mecánico para evitar que el mismo gire.
El otro extremo del vínculo mecánico se fija, directamente o a través de un acoplamiento mecánico adicional, a la unidad que se accionará. De manera de satisfacer los variados requisitos en los sistemas de potencia fluidos, los cilindros tipo pistón están disponibles en variados diseños.
II.3.0. Calculo de la Fuerza de Empuje.
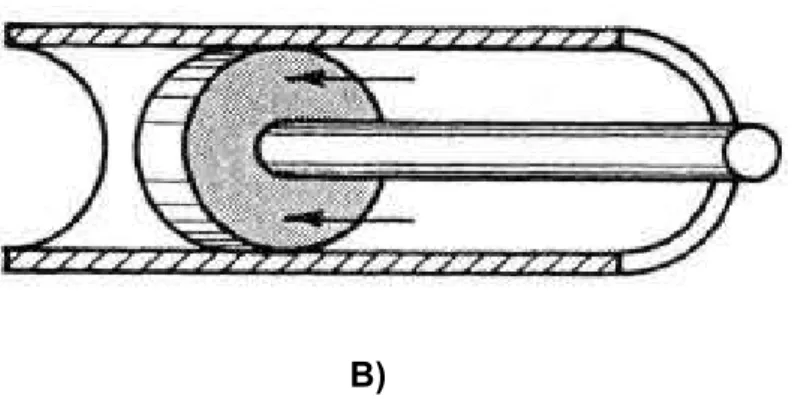
Las figuras 2.3.0-A y 2.3.0-B son vistas del corte de un pistón y vástago trabajando dentro de la camisa de un cilindro. El fluido actuando sobre la cara anterior o posterior del pistón provoca el desplazamiento de este a largo de la camisa y transmite su movimiento hacia afuera a través del vástago.
El desplazamiento hacia adelante y atrás del cilindro se llama "carrera". La carrera de empuje se observa en la, Fig.A y la de tracción o retracción en la Fig. 2.3.0-B.
La presión ejercida por el aire comprimido o el fluido hidráulico sobre el pistón se manifiesta sobre cada unidad de superficie del mismo como se ilustra en la figura 2.3.0.1.
B)
Figura 2.3.0. -A) Carrera de avance del pistón,-B) Carrera de retroceso del pistón.
Por ejemplo si nuestro manómetro indica Kg. /cm2, la regla para hallar la fuerza total de empuje de un determinado cilindro es: "El empuje es igual a la presión manométrica multiplicada por la superficie total del pistón", o:
F (Kg.) = P (Kg./cm²) x A (cm²)
Dónde:
F= Es la fuerza de empuje lograda por nuestro actuador y está dada en Kg. P= Es la presión manométrica y está dada en Kg/cm2 y
A= Area de la sección transversal del pistó que está dada en cm2.
Importante: La fuerza de retracción del pistón de la figura 2.3.0-B está dada por la presión multiplicada por el área "neta" del pistón. El área neta es el área total del pistón menos el área del vástago.
II.3.1. Dimensionando un Cilindro.
Un cilindro neumático debe ser dimensionado para tener un empuje mayor que el requerido para contrarrestar la carga.
El monto de sobredimensionamiento, está gobernado por la velocidad deseada para ese movimiento; cuando mayor es la sobredimensión más rápida va a realizarse la carrera bajo carga.
En la figura 2.3.1.1, el cilindro neumático soporta una carga con un peso de 450 Kg., su diámetro es de 4", y la presión de línea es de 5,5505397414 Kg./cm2. El cilindro en estas condiciones ejerce un empuje exactamente igual a 450 Kg., en estas circunstancias el cilindro permanecerá estacionario soportando la carga, pero sin moverla.
II.3.2. Sobre dimensionamiento de cilindros.
Esto depende de muchos factores, se sugiere aplicar la siguiente regla para usos generales cuando la velocidad de desplazamiento no es importante, seleccione un cilindro con una fuerza de empuje en 25% superior a lo necesario para altas velocidades sobredimensione en un 100%.
II.3.3. Velocidad de un Cilindro.
La velocidad de desplazamiento de un cilindro hidráulico es fácil de calcular si se emplea una bomba de desplazamiento positivo.
En la figura 2.3.3.1, mostramos un ejemplo típico, con un caudal de 40 litros por minuto ingresando al cilindro hidráulico.
Figura 2.3.3.1.- Velocidad de desplazamiento del pistón de un cilindro.
El área del pistón es de 78 cm², para encontrar la velocidad de desplazamiento primero convertiremos los litros en cm³ por minuto es decir:
min . /
Luego dividimos este valor por el área del pistón obteniendo la velocidad:
min
min . /
Sin embargo existen diversos tipos de actuadores para distintas aplicaciones, en el caso de esta tesis solo utilizara los actuadores neumáticos, por ser más baratos y fáciles de utilizar y construir.
II.4 ELEMENTOS DE CONTROL
II.4.1 Contactores
Son actuadores que sirven de interface entre los mandos de control y los actuadores eléctricos de mayor potencia. Por medio de la excitación eléctrica de una bobina, el magnetismo creado por ella, atrae un dispositivo mecánico que a su vez conmuta uno o varios interruptores mecánicos que pueden manejar corrientes elevadas.
Los contactores más comunes poseen bobinas de control a 110 o 220 volts y contienen un juego de 4 interruptores conmutables, uno como auxiliar y los otros tres utilizados para las fases de la corriente trifásica utilizada comúnmente en la industria.
Son mecanismos electromagnéticos, que conmutan uno o varios contactos eléctricos por medio de la fuerza electromagnética, generada por paso de la corriente de control a través de su bobina.
II.5 El control en la manipulación de robots
Existen numerosos factores que deben considerarse en lo que concierne al control del robot tales como las acciones a realizarse, características estructurales y dinámicas del robot y el equipo existente para la realización del control. Como en muchos otros sistemas el control del robot puede ser realizado por técnicas análogas, híbridas o con la utilización de microprocesadores.
La comunicación entre la unidad de control del robot y el usuario se realiza ya sea a través de una terminal o una “caja técnica”. La caja técnica es un método más simple pero no permite sistemas de control muy complejos. Por otra parte el sistema de control recibe la información a través de los sensores y éste la transforma para que pueda utilizarse dentro de la trayectoria del robot a nivel estratégico de control. En el nivel táctico de control el movimiento asignado al brazo es mapeado dentro de las trayectorias de unión del robot. La ejecución de este mapeo generalmente requiere numerosos cálculos matemáticos. Cuando la posición y velocidad deseada se determina, ésta se realiza en el nivel ejecutivo. Este nivel permanentemente genera señales a las entradas de los actuadores cuya labor es colocar las uniones del robot en la posición deseada.
microcomputadores reciben la información del estado instantáneo de la unión del robot de los sensores a través de convertidores analógico-digital y a través de convertidores digital analógico envía la dirección deseada a los actuadores.
Además de esto el control directo digital de los robots permite el desarrollo de controladores a nivel general que puede aplicarse a diferentes tipos de robots con diferentes estructuras lo cual no puede lograrse por medio de la técnica análoga. Sin embargo, la ley de control utilizada a nivel ejecutivo siempre debe ser aquella que de la manera más simple posible pueda satisfacer los requerimientos deseados de tal manera que se evitan largos procesos en paralelo.
II.5.1 Tipos de trayectorias.
Para realizar una tarea determinada el robot debe moverse desde un punto inicial a un punto final. Este movimiento puede ser realizado según infinitas trayectorias espaciales. De todas ellas hay algunas que, bien por su sencillez de implementación por parte del control cinemático o bien por su utilidad y aplicación a diversas tareas, son las que en la práctica incorporan los robots comerciales. De este modo, puede encontrarse que los robots dispongan de trayectorias punto a punto, coordinadas y continúas.
II.5.2 Trayectorias punto - punto.
En este tipo de trayectorias cada articulación evoluciona desde su posición inicial a la final sin realizar consideración alguna sobre el estado o evolución de las demás articulaciones. Normalmente, cada actuador trata de llevar a su articulación al punto de destino en el menor tiempo posible, pudiéndose distinguir dos casos: movimiento eje a eje y movimiento simultáneo de ejes.
Sólo se mueve un eje cada vez. Comenzará a moverse la primera articulación, y una vez que ésta haya alcanzado su punto final lo hará la segunda, y así sucesivamente. Este tipo de movimiento da obviamente como resultado un mayor tiempo de ciclo, teniendo como única ventaja un menor consumo de potencia instantánea por parte de los actuadores.
Movimiento simultáneo de ejes
En este caso todos los actuadores comienzan simultáneamente a mover las articulaciones del robot a una velocidad específica para cada una de ellas. Dado que la distancia a recorrer y las velocidades serán en general diferentes, cada una acabará su movimiento en un instante diferente.
El movimiento del robot no acabará hasta que se alcance definitivamente el punto final, lo que se producirá cuando el eje que más tarde concluya su movimiento. De esta manera, el tiempo total invertido en el movimiento coincidirá con el del eje que más tiempo emplee en realizar su movimiento particular, pudiéndose dar la circunstancia de que el resto de los actuadores hayan forzado su movimiento a una velocidad y aceleración elevada, viéndose obligados finalmente a esperar a la articulación más lenta.
Por los motivos expuestos, las trayectorias punto a punto no están implementadas salvo en robots muy simples o con unidades de control muy limitadas.
II.6 Subsistemas.
Figura 2.6.- Subsistemadelazo abierto con exclusión de la unidad del control.
II.6.1 Transmisiones.
La función de las transmisiones es en general darse cuenta que la adaptación de impedancias mecánicas como las crucetas son para transmitir los momentos de torsión engendrados por los actuadores a las coyunturas de los motores convencionales de corriente continua y que son usados debido a que sus velocidades de eje son generalmente mucho más altas que las que el de coyunturas requeridas, mientras sus momentos de torsión nominales son demasiado bajos. Las transmisiones se diseñan para aumentar el momento de torsión disponible en las coyunturas, y reducir la velocidad angular o “razón de transmisión”.
Las transmisiones por lo tanto son responsables de una proporción grande de los disturbios internos no-lineales en un sistema de robótica. Además, estos disturbios son a menudo los modelos no-inmóviles, y “razonables” que están raramente disponibles. Las consecuencias principales de esta situación son: una pérdida de la precisión y la generación de vibraciones que dirigen a la fatiga mecánica, o a problemas de estabilidad.
II.6.2 Sensores.
Sensores internos: Estos sensores miden posiciones comunes y velocidades directamente. La medida de posiciones angulares (o lineales) es generalmente bastante fácil, con los potenciómetros, codificadores digitales y transformadores diferenciados.
Sensores externos: Estos sensores miden interacciones entre ellos mismos y el entorno. Una dificultad, al usar tales sensores, está al extraer y utilizar la parte de la información más útil a la aplicación.
II.6.2.1 Sensores de presencia.
Además de esta aplicación, los sensores de presencia se usan como sensores externos, siendo muy sencillos de incorporar al robot por su carácter binario y su costo reducido.
Los detectores inductivos permiten detectar la presencia o contar el número de objetos metálicos sin necesidad de contacto. Presientan el inconveniente de distinto comportamiento según del tipo de metal del que se trate.
El mismo tipo de aplicación tiene los detectores capacitivos, más voluminosos, aunque en este caso los objetos a detectar no precisan ser metálicos. En cambio presentan problemas de trabajo en condiciones húmedas y con puestas a tierra defectuosas.
CAPITULO III CARACTERISTICAS DEL EQUIPO
PROPUESTO, SOFTWARE Y DISEÑO DEL HARDWARE DEL
EQUIPO CONSTRUIR
En esta tesis para el diseño de las diferentes partes que integran el control total de las naves, se dividió en 3 sectores que son las características del equipo propuesto, marcando los elementos que se tienen que utilizar para elaborar y acondicionar las instalaciones destinadas a la producción de aves para consumo humano, así como el tipo de Software y el diseño del equipo propuesto; que enseguida se describirán.
III.0 Características del equipo propuesto.
Las características mencionadas a continuación están basada en la cantidad de aves que se van a alojar en las jaulas que son 25 aves:
i. Bebederos tipo niple ii. Comederos tipo tolva
iii. Extractores tipo turbina iv. 1 Pistón neumático por jaula v. 4 Sensores infrarrojos por
charola
vi. 1 Sensor infrarrojo para activación del motor con cepillo por jaula
vii. 1 Charolas de vidrio de 3mm* 90cm*60cm por jaula
viii. 1 motor con cepillo rotatorio por jaula para la limpieza de cuchilla ix. 1 cuchilla tipo espátula por
jaula
x. 1 Canaleta tipo V de 90cm por jaula
xi. Canaleta tipo V para acoplamiento entre jaulas de 25cm
xiii. 7 bandas de acrílico flexible para transporte de heces de 24.4Cm*.30m cada una para las naves de 15m*12m.
xiv. Tolva de recolección de heces de 1.5m*1m*1m por nave
xv. Un motor de CA de ½ de HP. Para las 6 y 7 bandas de recolección por nave.
xvi. 66 rodillos de acero galvanizado para las bandas transportadoras de la nave 1, 84 para las bandas de la nave y 84 para la nave 3. xvii. 6 rodillos de acero
galvanizado con eje fijo para acoplamiento con el motor de CA en la nave 1 y 7 para las naves 2 y 3.
xviii. 66 sensores con fototransistores por banda para la nave de 18m*10m
xix. 182 sensores con fototransistores por banda para las naves de 15m*12m
xx. 1 control de temperatura general por nave
xxi. 1 tarjetas de control para los sensores por nave.
xxii. 1 modulo Bluetooth para accionar la limpieza general por nave xxiii. 1 micro controlador
pic16F627A para acoplamiento del Bluetooth
por nave.
xxiv. 1 driver L293D para control de válvulas activadoras de los actuadores por nave
xxv. 3 válvulas neumáticas 1 entrada 2 salidas para acción de los actuadores por nave
xxvii. Carrete de manguera hecha de silicón para peces de 1km de longitud para conexión y distribución entre actuadores
xxviii. Pegamento industrial de alta resistencia para unión de conectores de manguera
xxix. Conectores para acoplar manguera
xxx. 3 fuentes de poder de 9v a 500mA para alimentación de tarjetas controladoras por nave xxxi. 1 fuentes de poder de 12v
a x A para acción de válvulas por nave
III.1 Diseño del software:
Primero que nada para la realización del software es necesario el análisis y la manera en cómo se lograría la recepción de los datos, a través de un módulo inalámbrico de Bluetooth conectado a un micro controlador con el código apropiado para la interpretación de los datos recibido, así como el diagrama de la secuencia en el que está basada la programación que llevara el micro controlador y el programa para él envió de datos por medio de una computadora o cualquier celular que tenga el programa adecuado para él envió de datos de manera inalámbrica por Bluetooth. Para realizar la solución se consideró la forma en cómo se van a interpretar los datos que se reciben, que tipo de micro controlador utilizaremos para almacenar nuestro código y el programa que transmitirá nuestros caracteres de control.
asignaríamos al carácter “A”, es decir que al recibir un 1 en nuestro micro controlador corresponde a que la válvula A toma el valor de 1 (activado) y las válvulas B y C toman el valor de 0 (desactivado) y de forma contraria cuando se termine el proceso de limpieza de las naves de producción, esto con el fin de que las válvulas al recibir estas instrucciones harán que nuestro actuador de limpieza realice un avance y retroceso (limpiar y regresar a su posición de reposo), para ello se realizó un diagrama de flujo con las siguientes características:
1.- Se deben configurar los puertos RB1 y RB2 del micro controlador como entradas. 2.- Los puertos RB3 y RB4 se deben configurar como salidas.
3.- Una vez hecho esto se coloca una variable llamada START o inicio que le indicara al micro controlador que allí es donde comenzara la búsqueda y comparación de los caracteres que le lleguen desde los puertos de entrada con un dato cargado en la variable w que es 1, 2 y el carácter “A”.
SISTEMA DE CONTROL PARA UNA GRANJA DE
DE AVES PARA EL CONSUMO HUMANO.
CONFIGURACIÓN PUERTOS
RB1, RB2 ‐> ENTRADAS
RB3, RB4 ‐> SALIDAS
START
DATO W=1
NEXT
DATO W=2
NEXT1
DATO W=A
ENCIENDE INT1
RB4=1
ENCIENDE INT2
RB3=1
BARRAMOS PORTB
CLRF PORTB
NO
SI
SI
NO
SI
III.1.1 Modo de funcionamiento preliminar.
El sistema para su funcionamiento se basa en la utilización de grupos de 3 válvulas neumáticas conectadas a un driver L293D y a un arreglo con compuertas básicas NOT cuya finalidad es la de liberar el aire comprimido que se encuentra en las mangueras conectadas a sus terminales, de este modo se logra el accionamiento de avance y retroceso de los actuadores que realizaran la limpieza de las charolas. Las válvulas controladoras, se pueden controlar de forma independiente, mediante un puente H. de esta manera podemos realizar diversos trabajos, como realizar la limpieza de la nave1 o realizar la limpieza de las naves 2 y 3 al mismo tiempo.
III.1.2 Software transmisor
El transmisor se encuentra compuesto por una computadora con dispositivo Bluetooth el cual enviara los caracteres a través de un enlace de radiocomunicación con nuestro Bluetooth del hardware a diseñar, además se necesita el reconocimiento y emparejamiento previo entre los módulos inalámbrico de Bluetooth, una vez realizado el emparejamiento, a través de Hyper Terminal de Windows y el puerto proporcionado por la computadora (puerto COM x), se podrá realizar el envío de los caracteres correspondientes a las funciones que se requieren para dar acción a las válvulas a través del micro controlador PIC16F627 es decir teclear un 1 para limpiar la nave 1, teclear 2 para limpiar las naves 2 y 3, y finalmente teclear A para apagar y terminar la limpieza de las naves.
III.2 Diseño del hardware
tipo de modulo inalámbrico de Bluetooth adecuado para el micro controlador a utilizar, el tipo de direccionador para controlar las válvulas considerando que cuente con protección interna o externa y el tipo de fuente regulada o no regulada, estos aspectos son muy importantes ya que una mala elección de los componentes y una mala alimentación de los mismos, llevara a resultados erróneos e indeseables al momento de controlar el hardware que se diseñara .
III.2.1 Elección del módulo inalámbrico de Bluetooth:
Se eligió entonces un módulo capaz de alcanzar una distancia superior a la alcanzada por un teléfono celular o una computadora que es de aproximadamente 10m, para este caso el modulo seleccionado fue el Modulo inalámbrico de Bluetooth para Micro controladores de marca Roving Networks, que es capaz de alcanzar distancias largas de aproximadamente de 100m, sin obstáculos notorios que intervengan en la recepción errónea de los datos, además de tener una capacidad de acoplamiento adecuado y sobretodo su bajo consumo de energía que es de 5v.
III.2.2
Elección del micro controlador
Para el caso del micro controlador se eligió el PIC16f627A ya que tiene una estructura compacta y liviana, además de poseer característicascomo:
a) Posee dos módulos de captura, comparación y modulación por ancho de pulso, los cuales son necesarios para controlar de manera independiente la velocidad de motores según la variación del ciclo de trabajo.
c) Posee un módulo de comunicación, el cual es muy importante para esta tesis pues es el responsable de la comunicación entre el módulo de Bluetooth y el micro controlador, además se ha configurado de forma asíncrona para la recepción de los datos de manera serie uno por uno a una tasa de transmisión de 9600bps, sin paridad, al igual que el modulo inalámbrico de Bluetooth.
d) En específico el micro controlador PIC16F627A es el que controla la el encendido y apagado de las válvulas, el cual hace uso del módulo de comparación al momento de recibir los caracteres de control ya sea el 1, el 2 o el carácter “A” a través del módulo de Bluetooth.
III.2.3 Elección del direccionador.
Para este caso fue más sencilla su elección, pues entre los más conocidos en el mundo de la electrónica son el L293B y D. se eligió el tipo D ya que tiene protección interna, es decir tiene un diodo interior conectado a cada salida, a diferencia del L293B, al cual le tienes que agregar protección externa con diodos más grandes como el 1N4001 o el 1N4002, entre sus características más particulares y la forma en cómo lo utilizaremos se puede mencionar lo siguiente:
a) Posee circuitería de protección, el cual limitara la corriente que circula por las válvulas y el puente H, a fin de que el puente H ni las válvulas se lleguen a dañar por una sobrecarga de corriente.
III.2.4 Elección de los inversores
Se utilizaron compuertas básicas Not ya que necesitamos realizar una inversión de polaridad para poder lograr la acción de las válvulas, es decir para lograr el avance y el retroceso de nuestro actuador se necesita la siguiente información la cual puede ser realizada con compuertas básicas Not o simplemente con un relevador 1 polo 2 tiros que simplificaría el trabajo de las compuertas, ver figura 3.2.4.1.
figura 3.2.4.1.- diagrama de conexión de válvulas
Básicamente lo que se realizó primero fue el establecimiento de caracteres con los cuales podamos accionar nuestras válvulas, y para ello se eligió “1,2, y A”, donde 1 activa las válvulas de la nave de 18m. Y el 2 activa las válvulas de las naves 2 y 3 de 15m y finalmente A que es la que apaga el proceso de limpieza.
III.2.5 Conexión final del receptor
Para la conexión final de los dispositivos se tiene que considerar material extra como:
2 resistencias de 330ohms 1 resistencia de 10kohms
1 Protoboard o bien la placa impresa que es la que realizaremos como circuito final al terminar nuestras pruebas y alambre para protoboard.
En la figura 3.2.5,-A y –B, se puede apreciar el aspecto esquemático y la conexión de prueba sobre un protoboard del receptor de datos para el control de la limpieza de charolas de las naves de producción.
A) RA7/OSC1/CLKIN 16 RB0/INT 6 RB1/RX/DT 7 RB2/TX/CK 8 RB3/CCP1 9 RB4 10 RB5 11 RB6/T1OSO/T1CKI 12 RB7/T1OSI 13 RA0/AN0 17 RA1/AN1 18 RA2/AN2/VREF 1 RA3/AN3/CMP1 2 RA4/T0CKI/CMP2 3 RA6/OSC2/CLKOUT 15 RA5/MCLR 4 U1 PIC16F627A 1B 1 1C 16 2B 2 2C 15 3B 3 3C 14 4B
4 4C 13
5B
5 5C 12
6B
6 6C 11
7B
7 7C 10
COM 9
U2
ULN2003A
1B
1 1C 16
2B
2 2C 15
3B
3 3C 14
4B 4 4C 13 5B 5 5C 12 6B
6 6C 11
7B
7 7C 10
B)
Figura 3.2.5,-A) Esquema de interconexión del receptor de datos, B) Montaje del receptor sobre un protoboard.
El diagrama anterior muestra las conexiones para 2 diodos emisores de luz; sin embargo para el control de las válvulas los pines a utilizar RB3, RB4 se destinaran para el control de las válvulas neumáticas.
III.2.6 Detector de heces
Figura 3.2.6.1.- Diagrama de visión de los fototransistores.
Circuito excitador del fototransistor
Para el diseño de la tarjeta detectora de heces y de accionamiento de la banda transportadora así como la del cepillo limpiador, se utilizó material comercial como el mostrado en los diagramas siguientes, ver figura 3.2.6.2.
Medición de voltajes en capacitor