57^1
C5
/,/.j3
5Lr%,.na /
UNIVERSIDAD TECNICA PARTICULAR DE
LOJA
dr
ESCUELA DE ELECTRONICA Y
TELECOMUNICACIONES
INFORME DE TESIS
Radio definido por Software - Estudio del estado del
arte y planificación de diseño de un Sistema de
Transmisión Digital
AUTORES:
Maria de los Angeles Arboleda Lascano
Johanna Soledad Ruque Chamba
DIRECTOR:
Ing. Carlos Carrion B.
CONTENIDO GENERAL
Certificación... Cesiónde Derechos... AutorIa... ...
Listade acrónimos ... iv
Listade figuras... OBJETIVOS... 1
RESUMEN...2
ORGANIZACIONDE LA TESIS ...3
PARTE I: ESTUDIO DEL ESTADO DEL ARTE CAPITULO I: Aspectos generales 1.1. Introducción... 1.2. Historia... 1,3. Conceptualización ... 6
1.4. Ventajas y limitaciones de la tecnologIa RDS...6
1.4.1. Ventajas ...6
1.4.2. Limitaciones...7
1.4.3. Aplicaciones...7
1.5. Situación actual y perspectiva de la tecnologia...7
CAPITULO II: Formas de implementación de RDS 2.1. Dispositivos ...9
2.1.1. PCs...9
2.1.2. DSP... 2.1.3. FPGA ...10
2.2. Comparación ... 10
PARTE II: LtNEA BASE PARA UN SISTEMA DE TRANSMISION DIGITAL CAPITULO III: Sistema de transmisiónlrecepción basado en RDS 3.1. Arquitectura para RDS ... 12
3.2. Partes del sistema de transmisiónlrecepción ... 13
3.2.1. Front End ...13
3.2.2. A DCs yDA Cs ... 14
3.2.3. Digital Down/Up Converter... 15
3.2.4. Corrección de errores...16
3.2.5. ModulaciOn!Demodulación ...16
CAPITULO IV: Diseflo de un modulador QAM 4.1. Diseño ... 17
4.2. Herramientas...18
4.3. Simulación ... 21
4.3.1. Modulador 16-QAM...22
4.3.2. Canal de Tx...23
4.3.3. Demodulador 16-QAM...24
4.3.4. Down-Converter ...26
4.4. Resultados .29
4.4.1. Digital Up-Converter y Down-Converter...29
4.4.2. Sistema 16-QAM...32
CAPITULO V: Conclusiones y recomendaciones 5.1. Conclusiones...43
5.2.
Recomendaciones ...44Referencias...46
Bibliografia... 48
ANEXO1... 51
ANEXO 2... 52
ANEXO 3... 53
ANEXO 4...
55
ANEXO
5...
57
ANEXO 6... 61
ANEXO 7... 62
CERTIFICACION
Ing. Carlos Enrique Carrion Betancourt
DOCENTE DE LA CARRERA DE ELECTRONICA Y TELECOMUNICACIONES DE LA UN1VERSIDAD TECNICA PARTICULAR DE LOJA
CERTIFICA:
Que La tesis titulada "RADIO DEF1NIDO POR SOFTWARE - ESTUDIO DEL ESTADO DEL ARTE Y PLANIFICACION DE DISEI14O DE UN SISTEMA DE TRANSMISION DIGITAL" presentada por las Srta. Maria de los Angeles Arboleda Lascano y la Srta. Johanna Soledad Ruque Chamba, cumple con los requisitos metodológicos y con los aspectos de forma y fondos exigidos en las Normas Generales previas a La obtención del TItulo de Ingeniero en Electrónica y Telecomunicaciones, vigentes en la Universidad Técnica Particular de Loja y de manera especial en la Escuela de Electrónica y Telecomunicaciones, por lo que luego de haberla revisado minuciosamente autorizo su presentación.
Loja, 29 de Enero de 2008
Ing. Betancourt
CESION DE DERECHOS
Nosotras, Maria de los Angeles Arboleda Lascano y Johanna Soledad Ruque Chamba, declararnos conocer y aceptar la disposición del Art. 67 del Estatuto Orgánico de la Universidad Técnica Particular de Loja, que en su parte pertinente textualmente dice: "Forman parte del patrimonio de la Universidad la propiedad intelectual de las investigaciones, trabajos cientificos o técnicos y tesis de grado que se realicen a través o con el apoyo financiero, académico o institucional (operativo) de la Universidad"
Ma. Angeles Ar1eda Lascano Johanna Ruque Chamba
TESISTA TESISTA
AUTORIA:
Las opiniones, análisis de resultados, conclusiones y recomendaciones de la presente
tesis son de exciusiva responsabilidad de los autores.
Los autores
Ma. Angeles Arboleda Lascano Pijiiu
F",
(W PIJ.rTTESISTA TESISTA
LISTA DE ACRONIMOS ADC ALU AGC ANSI ASIC ASK BB BER BPF DAC DDC DCD DSP DSL DUC FCC FEC IF FPGA
Conversor Analógico a Digital Analog-Digital Converter
Unidad Aritmético-LOgica Aritmetic Logic Unit
Control automático de ganancia Automatic Gain Control
Instituto Americano Nacional de Estándares American National Standards Institute
Circuito Integrado de aplicaciOn especifica Application Specific Integrated Circuit
Modulación por desplazamiento de Amplitud Amplitude Shift Keying
Banda Base Base Band
Tasa de bits errados Bit Error Rate
Filtro pasa bandas Band Pass Filter
Conversor Digital a AnalOgico Digital-Analog Converter
Desplazador digital de frecuencia hacia arriba Digital Down-Converter
Detector de portadora Data Carrier Detect
Procesador digital de seflales Digital Signal Processor
Linea digital de Abonados Digital Subscriber Line
Desplazador digital de frecuencia hacia arriba Digital Up-Converter
Federal Commission of Communication ComisiOn Federal de Comunicaciones
CorrecciOn de errores Forward Error Correction
Frecuencia Intermedia Intermediate Frequency
Arreglo de Compuertas Programadas por el usuario Field Programming Gate Arrays
FSK GPP MDL HPF 'SI ITU JTRS LNA LO LPF LUTs MAC MMJTS NARA NCO PC PSK QAM QPSK RC
ModulaciOn por desplazamiento de frecuencia Frequency Shift Keying
Procesador de propósito general General Purpose Processor
Lenguaje de Descripción de Hardware Hardware Description Language
Filtro pasa altos High pass filter
Interferencia inter-sImbolos Inter Symbol Interference
UniOn Internacional de Telecomunicaciones International Telecommunication Union
Sistema conj unto de radio táctica Join Tactical Radio System
Amplificador de bajo ruido Low Noise Amplifier
Oscilador Local Local oscillator
Filtro pasa bajas Low pass filter
Localidad de memoria Look Up table
Media Access Control Control de acceso a! medio
Sistema modular multifunciOn de transferencia de informaciOn Modular Multifunction Information Transference System
National Associations Radio Amateur Asociación Nacional para radio-aficionados
Oscilador Controlado Numéricamente Numerically Controlled Oscillator
Computador Personal Personal Computer
ModulaciOn por desplazamiento de fase Phase Shift Keying
ModulaciOn por amplitud en cuadratura Quadrature Amplitude Modulation
ModulaciOn por desplazamiento de fase en cuadratura Quadrature Phase Shift Keying
Radio Cognitiva Cognitive Radio
RDS Radio Definido por Software Software Defined Radio
RF Radio Frecuencia
Radio Frequency
RS Radio Software
Software Radio
Rx RecepciOn
SCA Arquitectura de Software Comunicaciones Software Communications Architecture
SDR Forum Software Defined Radio Forum Foro Radio Definido por Software
XSG Herramienta System Generator de Xilinx Xiiinx System Generator
Tx TransmisiOn
INDICE DE FIGURAS
Figura 1. Arquitectura General para un sistema RDS ...12
Figura2. Front end de RF...14
Figura 3. Digital Down Converter...15
Figura 4. Esquema de un modulador QAM...18
Figura 5. Virtex-11 Pro Board ...20
Figura 6. Sistema de transmisión 16-QAM...21
Figura7. Modulador 16-QAM...22
Figura 8. Canal de Transmisión ... 23
Figura 9. Vista intema del demodulador 16-QAM...24
Figura 10. Vista interna del ecualizador adaptativo ...25
Figura 11. Vista interna del bloque recuperación de portadora...25
Figura 12. Vista interna del detector de fase ...26
Figura 13. Digital down-converter...27
Figura 14. Digital up-converter...28
Figura 15. Espectro de componente I: a) en BB y b) en IF ...29
Figura 16. Espectro de componente I: a) en BB y b) en IF ...30
Figura 17. Espectro de componente I: a) en BB y b) en IF ...30
Figura 18. Espectro de componente I: a) en IF y b) en BB ...31
Figura 19. Espectro de componente I: a) en IF y b) en BB ...31
Figura 20. Espectro de componente I: a) en IF y b) en BB ...32
Figura 21. ConstelaciOn resultado de un modulador 1 6-QAM hecho en simulink para un tiempo de simulación de a) 3000 y b) 6000 muestras...33
Figura 22. Constelación resultado de un modulador 16-QAM simulado en XSG para un tiempo de simulación de a) 3000 y b) 6000 muestras...33
Figura 23. Constelación resultado de un modulador 16-QAM implementado en XSG para un tiempo de simulación de a) 3000 y b) 6000 muestras...34
Figura 24. Nivel de error en recepción para un modulador 16-QAM a) hecho en simulink, b) simulado en XSG y c) implementado en la FPGA...36
Figura 25.Formas de onda de la componenete I a) Tx simulada, b)Tx implementada, c)Rx simulada y d) Rx implementada...37
Figura 26. Formas de onda de la componenete Q a) Tx simulada, b)Tx implementada, c)Rx simulada y d) Rx implementada...37
Figura 27. Formas de onda de la seña QAM simulada: a) I_Tx vs I_Rx, b) Q_Tx vs Q Rxy c) bits _Tx vs bits _Rx ...38
Figura 28. Formas de onda de la sefla QAM implementada: a) I_Tx vs I_Rx, b) Q_Tx vsQRx y c) bits _Tx vs bits _Rx ... 39
Figura 29. Estimación de recursos del sistema 1 6-QAM ...40
Figura 30. Estimación de recursos: a) modulador 16-QAM, b) DUC, c) DDC y d) demoduladorI 6—QAM...42
FiguraA. Sistema 16-QAM...53
FiguraB. Modulador 16-QAM...54
Figura C. Digital Up-converter...54
Figura D. Digital Down-converter...54
FiguraE. Sistema 16-QAM...57
Figura F. Constelación resultado de un modulador 16-QAM simulado en Matlab para un tiempo de sirnulación de a) 3000 y b) 6000 muestras...58
Figura G. Resultados en frecuencia de la Componente I en: a) BB en Tx, b) IF y c) BB enRx... Figura H. Nivel de error en recepción para un modulador 16-QAM simulado en
Matiab. ... 60
Figura I. Tasa de bits errados para ci diseflo I 6-QAM simulado en Matlab . ... 60
Figura J. Implementación del sistema de transmisión 16-QAM ...61
FiguraK. Demodulador M-QAM...62
Figura L. Vista interna de uno de los bloques del modulador M-QAM...62
Figura M. Resuitados constelación Rx modulador 8-QAM ...63
Figura N. Resultados constelación Rx modulador 1 6-QAM...63
Figura 0. Resultados constelaciOn Rx modulador 32-QAM...63
Figura P. Resultados constelación Rx modulador 64-QAM...64
OBJET! VOS
General
- Contribuir con el desarrollo de un Sistema de Radio definido por software para la
Universidad Técnica Particular de Loja, abriendo el campo de investigación de sistemas de comunicaciones digitales.
EspecIficos
- Realizar un trabajo de investigación que brinde una perspectiva de la factibilidad,
ventajas y desventajas de la implementación de un sistema Radio definido por software, su campo de aplicación y sus formas de implementación.
- Presentar una arquitectura en base a la cual serIa posible la implementación de un sistema de Radio definido por software sobre dispositivos reprogramables FPGAs.
- Desarrollar etapas de un sistema de transmisiOn digital basadas en herrarnientas propias para la tecnologf a RDS, demostrando las capacidades y funcionalidades de las herramientas de software.
- Simulación e implementación de uno de los mOdulos que conforman un sistema de transmisión digital.
RESUMEN
La presente tesis presenta una vision general de la tecnologIa Radio definida por software (RDS), su situación actual y perspectiva a flituro; aqul se analizan algunos
aspectos generales de la tecnologIa tales como: historia, evolución, ventajas, limitaciones y aplicaciones, además de las formas de implementación de RDS.
Tarnbién se presenta el diseño de una ilnea base para un sistema de transmisión digital M-QAM basado en FPGAs, utilizando herramientas orientada a la simulación y a la implementaciOn como XSG de Xilinx. Para el desarrollo de la linea base se presenta: la arquitectura que utiliza esta tecnologIa asI como los diferentes bloques funcionales que conforman este tipo de sistemas digitales. El diseño presenta un sistema de transmisiOn I 6-QAM, en base al cual se brinda un patrOn que puede ser modificado para que trabaje en cualquier variaciOn de esta modulaciOn. Finalmente se presentan Los resultados obtenidos con sus respectivas conclusiones.
ORGANIZACION DE LA TESIS
Como primera parte de esta tesis se realiza el Estudio del Estado del Arte de RDS organizado de la siguiente manera: en el CapItulo I se tratan aspectos generales como 1.1 Introducción a la tecnologia en donde se destaca La importancia de la misma; su historia y cómo ha ido evolucionando se presenta en el apartado 1.2; en 1.3 se presenta cómo ha sido conceptualizada esta tecnologia por los diferentes organismos competentes; en 1.4 se presenta una recopilación de sus principales ventajas y limitaciones dentro de las distintas areas en las que puede incursionar; las distintas aplicaciones a las que se puede orientar RDS y las que actualmente están en uso se presentan en el apartado 1.5; y, para finalizar el capItulo I, en ci apartado 1.6 se trata
sobre la situaciOn actual y perspectiva de RDS con la finalidad de presentar la factibilidad o no del uso de esta tecnologIa. En el capItulo II se hace referencia a las distintas formas de Implementación de RDS brindando las distintas altemativas en las que se puede implementar un diseflo dependiendo de Las herramientas y dispositivos que se tengan disponibles como: PCs, DSPs, FPGAs. En el apartado 2.2 se hace una comparación entre las principales caracterIsticas de los dispositivos comünmente usados en el desarrollo de este tipo de aplicaciones.
La segunda parte está enfocada al diseflo de una lInea base para un sistema de transmisión digital, es asI que en el capItulo III se brindan las bases teóricas a considerar en un sistema de transmisiónlrecepción basado en RDS. En 3.1 se realiza una revision de la arquitectura para RDS, tema importante a considerar antes de empezar el diseflo de cualquier aplicaciOn; en 3.2 se presentan los bloques funcionales que forman parte de un sistema de transmisión digital como son: Front End, ADCs y DACs, digital Down/Up Converter, corrección de errores y modulaciónldemodulación.
El diseflo del modulador QAM se presenta en el capItulo IV cuyo esquema a seguir se presenta en el apartado 4.1; en 4.2 se realiza una breve revision de las posibles herramientas utilizables en la simulación e implementación del diseflo en mención; en 4.3 se presenta el trabajo realizado en base a la simulación del modelo propuesto divido en 5 módulos funcionales que son: modulador 1 6-QAM, canal de Tx, demodulador
16-QAM, down-converter y up-converter. Para finalizar este capItulo, en 4.4 se presenta los resuitados obtenidos de la simulaciOn e implementación tanto del DUC y DDC como del sistema I 6-QAM en su totalidad.
Finaimente en el capItulo 5 se presentan las conciusiones y recomendaciones brindadas
una vez presentados los resuitados.
PARTE I
CAPITULO I
Aspectos generales
1.1. Introducción
Desde algunas décadas atrãs, las transmisiones de radio han sido vistas y utilizadas como una de las mejores formas de comunicación entre dos o varios lugares remotos. Sus inicios se dieron en tomo a dispositivos analOgicos, lo que dio origen a la era analógica; pero debido a las limitaciones en recursos y aplicaciones alcanzables por medio de este tipo de comunicaciones se vio la necesidad de migrar a nuevos sistemas de transmisión, de donde surgen las comunicaciones digitales que, aunque han alcanzado su auge, aán siguen siendo mejoradas con el ãnimo de satisfacer las necesidades del cada vez más exigente mercado de las telecomunicaciones mundiales. Estas causas y su rápida proliferación a nivel de usuarios han contribuido con el desarrollo de nuevas y cada vez mejores tecnologias inalámbricas cuyo uso se ye limitado al tipo de dispositivos, bandas de espectro, especificaciones técnicas y aplicaciones de la tecnologIa a tratarse.
Junto con La aparición de nuevas y mejores tecnologIas surge la necesidad de lograr la compatibilidad entre las mismas e incluso de poder conseguir diversidad de tecnologIas en un solo dispositivo, lo que se conoce como interoperabilidad'. Para lograr este objetivo se requiere que los sistemas existentes tengan que migrar a una tecnologIa que facilite la interoperabilidad lo que representa una inversion económica significativa.
Una de las alternativas que apuntan a Lograr la convergencia tecnológica es el uso de dispositivos que cuenten con caracterIsticas de reconfigurabilidad 2 en sI mismos de tal forma que sea posible disminuir costos en la adaptación de las nuevas técnicas de transmisión y recepción (TxIRx), objetivo en el cual se encuentran trabajando varios grupos de fabricantes3.
La tan ansiada convergencia de tecnologIas y la masificaciOn en el uso del computador, sistemas informáticos y procesadores digitales de seflales provocaron que en la ddcada de los 90 apareciera "Radio Software (RS)", término usado para referirse a toda clase de dispositivos reconfigurables y reprogramables 4 por software que pueden ser utilizados en sistemas de comunicaciOn. La tecnologia RS reemplaza a los componentes analógicos usados en radios tradicionales por el uso de programas de software con el objetivo de igualar las caracteristicas implementadas en dicho hardware pero con La flexibilidad del software, es decir, las caracterIsticas del funcionamiento de sus diversos bloques pueden ser modificados con cambios en el software logrando asI significativos cambios en el comportamiento del hardware.
I Interoperabilidad: es Ia condiciOn mediante la cual sisternas heterogéneos pueden intercambiar procesos o datos. Tornado de: http://es.wikipedia.org/wiki/IflterODerab1I@4
2 Reconfigurabilidad: es la capacidad para adaptarse a cambios de requerirnientos en la comunicaciOn, de manera automática. Tornado de: J. Estudillo, R. Cumplido " Integracion de Redes y Protocolos con SDR", 2005; http://ccc.inaoep.mx/Reportes/CCC-05-004.pdf
Para ver grupo de fabricantes referirse al Anexo I.
'I Reprogramabillidad: irnplica la posibilidad de programar o reprogramar el dispositivo que se encuentra ya en el circuito impreso al que va destinado. Tornado de:
ipi'/sener-die.a1c.upves/asinaturaS/LSED/2002M3/PLDs/We'o5CCPW.htm
Aunque la idea de RS parezca muy prometedora, existen importantes limitaciones en las que se encuentran aUn trabajando los diversos grupos de investigación para asi lograr su pronta evolución y aceptación a nivel cornercial. De ahI la importancia del estudio de temas afines en busca de una "convergencia" total para todas las partes involucradas en la provision de servicios de comunicaciones inalámbricas.
1.2. Historia
Los primeros equipos de transmisión y recepción estaban constituidos en su totalidad por dispositivos analogicos que formaban parte de circuitos sintonizadores, etapas de frecuencia intermedia, detectores y amplificadores de baja frecuencia. Luego se incorporan microprocesadores a estos equipos de tal forma que se hacla posible controlar las funciones internas de los mismos; esto permitla afiadir mayores prestaciones a los dispositivos pero no se podia evitar aiin el montar y desmontar los equipos en el lugar en donde se encontraran instalados para la reparación o modificación de cualquier problema técnico existente. Años después se introduce el uso de dispositivos Procesadores Digitales de Señal, conocidos como DSPs por sus siglas en inglés. Con esto se logra incorporar técnicas digitales de procesamiento como filtrado y supresión de ruidos, lo que permite mejorar la calidad de las transmisiones con respecto a la de los equipos que están basados en dispositivos analógicos. Hasta aquI este tipo de tecnologIas de transmisión son conocidas como "radio-hardware". [1]
Luego se introdujo la posibilidad de controlar los equipos de radio desde un ordenador añadiéndole puertos de comunicación o interfaces para la conexiOn a! mismo. Gracias a la inclusion de las Ultimas caracteristicas nombradas y debido a La actual necesidad de interoperabilidad entre los diversos estándares y tecnologias de radio comunicación aparece el concepto de RS "Radio software", término propuesto por Joe Mitola en 1991 para referirse a la clase de radios que puede ser re-programables o re-configurables. En el ámbito civil ésta tecnologia es conocida como 'Radio definido por software" RDS.
El primero en desarrollar esta tecnologIa fue el departamento de defensa de los Estados Unidos, con el objetivo de obtener un equipo que pueda comunicarse permanentemente en distintas bandas de frecuencia, brindando compatibilidad entre las diversas tecnologIas usadas en las distintas ramas del departamento como son: ejército, armada, fuerza aérea, entre otras. [2]
1.3. Conceptualización
RDS es una tecnologIa que incluye todo tipo de dispositivo capaz de ser reconfigurado extemamente, de forma parcial o total, mediante modificaciones de software, tanto en sus técnicas de modulación como en su frecuencia de operaciOn y potencia de transmisiónlrecepción, otorgandole a tales dispositivos caracteristicas de interoperabilidad a nivel de estándares y tecnologIa.
Joe Mitola, considerado el padre de Ia tecnologIa RDS, fue el primero en definirla formalmente en 1991 como:
- "Sistema de Radio substancialmente definido por el software en el que ci comportamiento funcional de la capa fisica puede alterarse significativamente por medio del software". [5]
Algunos organismos importantes definen también a la tecnologIa RDS como se puede apreciar en ci Anexo 2.
1.4. Ventajas y limitaciones de la tecnologIa RDS.
1.4.1. Ventajas
Dentro del area comercial RDS brinda las siguientes ventajas:
- Implementar diferentes estándares en una sola plataforma, resolviendo los problemas de interoperabilidad actualmente existentes.
- Actualizar permanentemente los sistemas evitando asI que el uso de esta tecnologIa se descontinñe ante la aparición de otras nuevas con caracteristicas superiores a las existentes.
- Permite sustituir hardware de propósito general por hardware de propósito especIfico, reduciéndose asi ci tamaño, peso y por ende costo de los dispositivos. - Permite compartir infraestructura, plataforma de hardware y recursos de canal entre
multiples usuarios y diferentes estándares de comunicación.
Con respecto a los administradores y operadores de redes inalámbricas:
- Brinda soluciones de monitoreo, administración y gestiOn del espectro. - Permite realizar actualizaciones remotamente.
- Permite que cada operador configure en su plataforma de hardware, segün las caracterIsticas de sus sistemas: el rango de capacidades, tamaflos, consumo de potencia, redundancia, condiciones medioambientales, etc.
A nivel de fabricantes y area de manufactura permite:
- La fácil incorporación de nuevas caracteristicas tecnolOgicas como: antenas inteligentes, gestión de potencia adaptativa, técnicas de modulación y procesamiento de sefiales.
- Continuar el avance tecnológico y el desarrollo de los departamentos de investigación y desarrollo en las empresas.
En lo relacionado al usuario final las ventajas que presenta ésta tecnologIa son:
- Facilidad de configuraciOn de terminales para introducir nuevos servicios y caracterIsticas de funcionalidad.
- Aumento del tiempo de vida de los dispositivos existentes mediante su actualización por software acorde a las crecientes tendencias tecnolOgicas y de mercado.
- Habilidad para incorporar aplicaciones de roaming entre los ilmites de los operadores.
1.4.2. Limitaciones
- Los dispositivos RDS requieren de una fuerte seguridad asI como también de la capacidad de mantener sus caracteristicas de comunicación ain en entornos hostiles. - Mayor consumo de energIa comparado con los sistemas de radio fijo.
- La inclusion de estos dispositivos en diversas aplicaciones supone un incremento en su potencia, lo que dificulta su utilización en dispositivos electrónicos de consumo masivo; esto afectarla su costo final a evaluarse siguiendo la relaciOn "Capacidad de proceso - consumo de energia - precio", dependiendo de la tecnologIa a utilizarse. - Las diferentes versiones de software a desarrollarse presentarlan cierto grado de
dificultad en su manejo especialmente por parte de los usuarios finales.
1.4.3. Aplicaciones
Debido a la versatilidad de RDS, ésta es ampliamente utilizada en:
- El area de defensa y seguridad civil frente a problemas catastrOficos como desastres geográficos en los cuales se requiere una comunicación simultánea, permanente, inmediata y estable entre los diversos organismos encargados del area.
- Aplicaciones militares y de seguridad nacional gracias a sus caracterIsticas multi-estándar y multi-modo.
- Empresas cuyos sistemas se encuentren en constante evolución tecnológica como: telefonla celular, detección por radar y sistemas de información geográfica facilitando la transición entre las mismas.
- El desarrollo investigativo de los grupos de radioaficionados por sus bajos costos de implementación.
- Proyectos de investigaciOn que permitan el desarrollo de aplicaciones basadas en radio cognitiva, inteligencia artificial, robOtica etc.
1.5. Situación actual y perspectiva de la tecnologia
RDS es una tecnologIa que se ha venido desarrollando en la iiltima década a nivel mundial. Al igual que en otras areas, la investigación de esta tecnologIa se ha profundizado en algunos palses, especialmente en los cuales se originó, siendo notorios
los proyectos realizados en palses europeos y norteamericanos; a nivel de Latinoamérica RDS es relativamente nuevo por lo que aün se encuentra en etapas de investigación.
Varios organismos e instituciones han logrado avances a favor de RDS dentro de su area de competencia, asI: los fabricantes y operadores han contribuido a nivel comercial, universidades y centros tecnológicos a nivel investigativo/educativo, y los entes reguladores a fivel de estandarización.
Con el creciente desarrollo del sector de las comunicaciones inalámbricas se avizora un prometedor futuro de La tecnologia RDS, que puede incursionar en un gran nümero de areas con un prometedor desempeflo. Una de estas areas es La investigativa, especialmente a nivel de universidades de las cuales se espera se logren obtener bases para alcanzar el desarrollo de tecnologIas aün mej ores.
Otra area en la que tiene un buen futuro es en la comercial como es el caso de la telefonIa celular, en la cual RDS, por ser de tercera generación, hace posible incorporar nuevas prestaciones a La tecnologIa celular y, además, por sus ventajas de bajo costo de rnigración va a lograr una masiva introducción en el mercado. [6] Otro caso dentro del desarrollo en el area comercia de RDS son los productos militares que han demostrado ofrecer comunicaciones realmente seguras, por lo que se espera una adaptación de Los mismos al ámbito civil.
Se espera que los organismos que ya se encuentran trabajando en normas, regulaciones y recomendaciones en esta tecnologia logren concluir su trabajo para su esperada estandarización y asI lograr su evolución y puesta en el mercado en un menor plazo de tiempo.
La migración entre tecnologIas implica una gran inversion económica, hecho que afectará de manera directa a cualquier tecnologia que se proponga migrar a RDS. La diferencia, en donde se marca la ventaja económica frente a tecnologIas anteriores es que, una vez que un sistema completo haya migrado a RDS, se necesitará de muy pocos recursos económicos para la interoperabilidad con otras tecnologias e incluso para una nueva actualización de las mismas.
Se espera que RDS alcance su madurez tecnológica en la "radio cognitiva" 5 a donde apunta llegar. [7]
Radio Cognitiva RC: comunicación wireless en donde redes y nodos wireless cambian los parámetros particulares dc TxIRx para ejecutar su cometido de forma eficiente sin interferir con los usuarios
autorizados. Tornado de: p//es.wikipedia.org/wiki/RadiO cognitiva
CAPITULO II
Formas de implementación de RDS
2.1. Dispositivos
Al ser RDS una tecnologIa que permite reconfigurabilidad en los dispositivos en que se desarrolla, existen varias alternativas para la elección del hardware en el que puede ser implementada, tales dispositivos son computadoras personales (PC), procesadores digitales de señal (DSPs), arreglo de compuertas programables por el usuario (FPGAs) y procesadores de propósito general (GPP); equipos digitales que realizan tareas en base a programación y cuyas ventajas y usos dependen de la aplicación a la que se encuentren orientados.
2.1.1. PCs
Las aplicaciones basadas en computadores personales utilizan la tarjeta de sonido para las funciones relacionadas con la adquisición de datos, digitalización de la seflal entrante y funciones correspondientes al procesamiento digital de señales. Además del uso de las tarjetas de sonido mencionadas, se requiere del uso de software especializado durante todo el procesamiento de transmisión y recepción. [8]
Una de las limitaciones de una radio transmisión basada en PCs es la dependencia permanente de un procesador y sus componentes, lo que no permite una viable implementación de RDS a nivel comercial. Las caracteristicas de transmisión se encuentran definidas por el tipo de software utilizado para su desarrollo. Un ejemplo de proyectos que emplean PC para la implementación de RDS es el GNU Radio cuyo sistema se encuentra basado en Linux, Windows y MAC.
2.1.2. DSP
La posibilidad de manejar las senales digitales ha permitido la incursion de procesadores digitales de seflales que, como su nombre lo indica, se encargan de manipular las seflales digitales de manera eficiente. Tienen gran flexibilidad y facilidad de reprogramación por lo que pueden ser usados para cumplir diversas tareas como: filtros, DACs/ADCs, DUCs/DDCs, detección y correcciOn de errores, modulación y demodulación, etc. [9], dependiendo de la aplicación en la que vayan a ser utilizados.
Los DSPs permiten la fabricación de chips que soportan multiples funciones, y que además son de un tarnaño muy pequeño. Aplicados a SDR provocan que este dispositivo soporte multiples tecnologIas e interoperabilidad.
Los DSPs no cumplen los requerimientos de RDS debido al poco procesamiento paralelo (paralelismo6) que no permite alcanzar un buen desempeño, además deben ser programados en lenguaje de bajo nivel, lo que es una limitación debido a la falta de personas calificadas en el tema dificultando la fácil depuración de los programas. Las frecuencias a las que trabajan actualmente los DSPs no permiten cumplir con el alto procesamiento que demanda RDS [11].
2.1.3. FPGA
Para la implementación de un sistema RDS se requiere de dispositivos con los cuales se logre alcanzar velocidades de procesamiento muy elevadas y que a su vez permitan reconfigurabilidad. Los Arreglos de compuertas programables por el usuario, FPGAs, presentan corno una de sus caracterIsticas principales el paralelismo, cualidad que los hacen óptimo para su uso en sistemas de RDS.
El uso de estos dispositivos en este tipo de aplicaciones está orientado a: superar limitaciones de otros dispositivos a elevada tasa muestreo, lograr el proceso conversiOn digital hacia arribalabajo de frecuencia, aplicar técnicas para correcciOn de errores, aplicar algoritmos de compresión, ecualización, protocolos de manejo e incluye todo procesamiento digital de la seflal que requiera de modificaciones que le permitan ajustarse a las necesidades especIficas de un diseño.
Es asI que los fabricantes de FPGAs están orientando esfuerzos hacia la implementación de RDS en FPGAs. Este es el caso de Altera y Xilinx, los dos más grandes vendedores de FPGAs en el mundo que están proponiendo soluciones para RDS. [12]
2.2. Comparación
Para una mejor elección del dispositivo a ser utilizado en un sistema basado en RDS es necesario analizar las caracterIsticas con las que cuenta cada dispositivo segUn la aplicación a implementarse, de tat manera que la elecciOn de cualquiera de estos sea la más adecuada y no represente un gasto innecesario de recursos ya que estos ültimos determinan el costo en el mercado.
Las caracteristicas más relevantes de Los dispositivos nombrados anteriormente se presentan en La
tabla 1 [13]:
6 Paralelismo: conocido también como multiprocesarniento, consiste en ejecutar varias instrucciones de
procesamiento a la vez. Tornado de:
http:/iwww.rn jtecrioiogico.coiii/Main/ParaleliSmOMUltiPrOCesamiento
Tczbla 1. Caracterisficas de GPPs, DSPs, FPGA S
GPPs DSP FPGAs
Baja velocidad de procesamiento de Velocidad de procesamiento media lnterfaz externa moderna paquetcs
Complejo protocolo de capa MAC Filtrado deficicnte de sefiales a bajas Desplazamiento de frecuencia a
velocidades banda base
Opera con protocolos a nivel de capa Dccimaciónhinterpolaciôn de señales Desplazamiento de frecuencia a de red __________________________________ frecuencia intermedia
Codiflcación de paquetes en Modulación y demodulación a bajas Filtrado de señal
transmisión velocidades
DecodificaciOn de paquetes en AGC a bajas velocidades Decimación e intcrpolación de
recepciOn sefiales
EjecuciOn de algoritmos de control FEC a velocidades medias Modulación y demodulación a altas
de ]as seflales velocidades
Procesamiento de paquetes a AGC a altas velocidades velocidadcs medias
Protocolos simples en la capa MAC FEC a altas velocidades
Procesamientos de paquetes a altas velocidades
PARTE II
CAPITULO III
Sistema de transmisión/recepción basado en RDS
Para realizar un buen disefio de un sistema de TXIRX se debe tomar como base la arquitectura que sea considerada como más apropiada segün el sistema de cornunicaciones que se requiera implementar. Una vez definida La arquitectura a implementar es recomendable dividir el esquema en bloques funcionales, lo que facilitará tanto el diseflo como su simulación e implementación. Además, esto ayudará en la etapa de verificación y corrección de errores al momento de la optimización final. Para facilitar la implementación futura de un sistema de Tx/Rx basado en RDS sobre FPGAs se presenta una arquitectura y un detaLle de Las partes que conformarIan el sistema.
3.1. Arquitectura para RDS
Un sistema de RDS se encuentra sobre una A rquilectura del Software de Comunicaciones (ScA), la cual es una arquitectura base abierta que indica a los disefladores cómo se encuentran los elementos de hardware y software para operar en armonla en un Radio Definido por Software. La SCA está actualmente extendiendo su cobertura al hardware programable FPGA y DSP. [14]
La arquitectura base para un sistema RDS posee tres secciones muy bien delimitadas, tanto en transmisión como en recepción, como se puede apreciar en lajigura 1.
Transmisión
Sección Banda Base Section Frecuencia Intermedia
--- 1
Procesamiento I
—* digital en DAC DUC
Banda Base
SecciOn Radio Frecuencia
DesplazadorLna analógico
de frecuencia
PeendOn
Sección Banda Base Sección Frecuencia Intermedia
I---•1
Procesamiento I I
digital en -
H
DAC DUCBanda Base
Sección Radio Frecuencia
Desplazador ILna analógico
[image:26.575.78.491.443.679.2]de frecuencia
Figura I. A rquitectura General para un sistema RDS
Sección de Radio Frecuencia: conocida conic, Front-End RF, en la cual está contenido todo procesamiento de la sefial que se encuentra en radio frecuencia en la que es recibida o transrnitida, esto es:
- La transmisiónlrecepción de la seflal desde y hacia la antena por medio de un acoplador de impedancias cuando sea necesario.
- Convertidores de seflal de RF a IF y viceversa conocidos como down/up-converters analógicos respectivamente.
- Amplificación de la seflal en el lado de recepción.
Sección de Frecuencia Intermedia: que implica ci procesamiento de la seflal que se encuentra en IF. En esta etapa se encuentran:
- Convertidores Digital-Analógicos (DACs) y convertidores Analógico-Digitales (ADCs).
- Desplazadores digitales de frecuencia hacia arriba (DUCs), y hacia abajo (DDCs).
Sección Banda Base: en donde la seflal se encuentra en su frecuencia original conocida como "señal de banda base". AquI se realiza todo procesamiento digital de la seflal tanto para la adecuación de la sefial a ser transmitida, como para la recuperación de la información de la seflal recibida. Esta etapa o sección consta de:
- Generación de portadora /Recuperación de portadora. - Modulación!Demodulación.
- CodificaciónlDecodificación. - Corrección de errores en ci receptor.
Para aplicaciones sobre FPGAs Altera y Xilinx, que son las empresas fabricantes de dispositivos FPGAs más grandes del mercado, presentan sus propios modelos para arquitecturas de sistemas RDS dentro de la arquitectura general indicada con anterioridad. El presente trabajo será implementado sobre dispositivos de La compañIa Xilinx, por lo que se considerarán sus modelos propuestos. Si se desea hacer una implementación en base a la arquitectura propuesta por la compañIa Altera refiéra.se a [15].
3.2. Partes del sistema de transmisión/recepción.
En la sección anterior se presentó la arquitectura de un sistema RDS. En este apartado se hard una descripción de los módulos principales a considerarse para una futura implementación.
3.2.1. Front End
Está formado por dispositivos electrónicos (hardware) que se encargan de adaptar el nivel de la seflal (RF) para que su frecuencia sea adecuada para la etapa que les antecede o les precede.
Un subsistema front-end analógico tiene una gran capacidad de banda ancha y está diseñado para despiazar un segmento entero del espectro a una frecuencia deseable de IF, que es previa a la frecuencia de digitalización.
En este módulo las seflales se procesan a la frecuencia de transmisión o recepción. En el lado de transmisión se produce una amplificaciOn de la seflai entregada por las etapas anteriores hasta ci nivel de potencia suficiente para que sea transmitida por el medio fisico o canal de transmisión. En recepción la sefial Ilega con una gran atenuación, por
lo que su nivel debe incrementarse sin agregar demasiado ruido para que pueda ser procesada en los circuitos siguientes del receptor.
Esta etapa está compuesta generalmente por: up-converters analógicos, down-converters analógicos, amplificadores de bajo ruido (LNA), control automático de ganancia, como se puede apreciar en la fIgura
2.
R
4 F
Figura 2. Front end de RF
3.2.2. ADCs y DACs
Los convertidores digitales-analógicos convierten la información digitalizada a su forma analógica para que sea apta para la transmisión; Los convertidores analogicos-digitales realizan la funciOn inversa. Seleccionar el tipo de ADC/DAC a utilizar depende de la aplicación que se desee implementar; utilizar las modemas FPGAs para estos propósitos es una ventaja ya que perrniten manejar tasas de datos a altas velocidades como cualquier convertidor comercialmente disponible.
Debido a que RDS puede trabajar en grandes rangos de frecuencias, sin la necesidad de realizar eambios en el hardware disponible se requiere que Los convertidores utilizados puedan ser capaces de manejar grandes tasas de muestreo, altas frecuencias de operación y grandes anchos de banda con un alto desempeflo. Los ADCs son colocados lo más cerca posible a la antena, muestrean La seflal y luego La introducen en etapas siguientes para su procesado.
Los ADCsIDACs se han convertido en un factor crItico en el desarrollo de este tipo de aplicaciones por lo que los requerimientos que estos dispositivos deben ofrecer son altos, ya que éstos limitan y determinan la sensibilidad de todo el sistema de radio transmisión-recepción. La resoLución en estos dispositivos indica el niimero de valores discretos que pueden ser convertidos, usualmente es expresado en bits. [16] En el caso de la tarj eta Virtex IT-Pro, tarjeta a utilizarse, los convertidores ya vienen incorporados por lo cual se requerirla de profundizar en el conocimiento de estos7.
3.2.3. Digital Down/Up Converter
Los DDCs y DUCs son la etapa del receptor encargada de bajar la frecuencia de la sefial recibida para que pueda ser fácilmente procesada en etapas posteriores y de esa manera recuperar la información transmitida. Los DUCs son los encargados de subir la
Pam más informaciOn ver: Xilinx University Program Virtex-11 Pro Development System, "Hardware
Referente Manual
frecuencia de banda base a IF para que la seflal en el transmisor sea adaptada a RF y posteriormente sea transmitida.
Para RDS se elige diseñar los DDCs y DUCs en FPGAs ya que pueden alcanzar grandes tasas de muestreo y además ofrecen la facilidad de ser adaptados a requisitos particulares del disefio. Un ejemplo de diseflo e implementación de esta etapa es presentado en el apartado 4.2.
Una estructura interna básica de un down-converter es la mostrada en la Jigura 3, de
donde se puede divisar que está formado por un oscilador controlado numéricamente NCO, un LPF y un mezclador.[17] Con los mismos elementos se cuenta en un DUC a diferencia del filtro que debe ser un FIPF.
Señal Decimador
mod ul
Decimador
NCO
Figura 3. Digital Down Converter
El filtro paso-bajo es usado para reducir la tasa de muestreo para generar una seflal que pueda ser procesada utilizando recursos computacionales razonables. El NCO es el encargado de generar seflales senoidales y cosenoidales digitales cuya frecuencia de salida depende de la constante A en la ecuación (1), en donde FCLK es la frecuencia del reloj de la tarj eta y L es ci námero de bits procesados.
Fout=A"
(1)Se debe tomar en cuenta el nivel de ruido introducido en el diseflo de tal manera que no afecte a la fidelidad de los dispositivos. El nivel de ruido máximo introducido dependerá de la aplicación que se desee implementar asi como la tasa de muestreo que se podrIa alcanzar. El filtro tiene que ser normalmente un filtro de banda estrecha con un orden elevado. La necesidad de un filtro de orden elevado se traduce en un filtro costoso por la tasa de muestreo de la seflal de entrada. Una solución es diezmar la seflal para asI obtener una tasa de muestreo más baja, y luego filtrarla con un filtro que requiera una tasa de muestreo reducida y por lo tanto de menor orden. [18]
3.2.4. Corrección de errores
Debido a la presencia de errores en los bits de información en el receptor es necesario aplicar la técnica de detección de errores (FEC) que consiste en la codificación de los
datos para que sea ci receptor quien detecte y a su vez corrija los mencionados errores. Esto ayudará a mejorar la tasa de bits errados (BER).
El proceso de codificación se realiza agregando bits a la información. Estos codigos se clasifican en codigos de bloque y convolucionales. En la codificación por bloques la secuencia de datos a transmitir se divide en bloques de bits que se introducen juntos en el codificador, mientras que la codificación convolucional es una codificación continua y la secuencia de bits codificada depende de los bits previos. [19]
Como una subclase de los códigos de bloque se encuentran los codigos Reed-Solomon (RS), los cuales presentan una serie de aplicaciones en ci area de las telecomunicaciones y la seguridad, tales como en la telefonla móvil, comunicaciones por satélite digital, asI como en sistemas xDSL de comunicación por cable. [20] El uso de estos codigos en aplicaciones como las mencionadas nos da la idea del grado de confiabilidad que presentan.
Para futuras implementaciones de un sistema Radio-Software sobre FPGA, se recomiendan el uso de los cOdigos Reed-Solomon por sus ventajas y dado que para diseflos con herramientas de Xilinx existen modelos disponibles con ci software en
demos de Matiab en base a XSG para aplicaciones 1 6-QAM.
3.2.5. ModulaciónlDemodulaciófl
Para un sistema de RDS uno de los módulos de mayor importancia son ci modulador y demodulador es por ello que debe elegirse cuidadosamente ci tipo de modulador/demodulador a ser implementado.
Dependiendo de si se va a hacer una aplicación especIfica y de la complejidad de la misma, debe tomarse en cuenta la cantidad de recursos de ]a FPGA a utilizarse tratando siempre de evitar ci uso innecesario de recursos.
Existen algunos tipos de modulador/demodulador digitales que pueden ser utilizados, tal es el caso del modulador ASK, FSK, PSK y QAM.
La simulación e implementación del sistema de modulación 1 6-QAM, que se presentará posteriormente, será un ejemplo práctico del uso de los moduladores digitales para un sistema RDS y servirá como base para futuras implementaciones de sistemas de comunicación.
CAPTULO IV
Diseiio de un modulador QAM
La fuente de información en un sistema de transmisión digital puede ser analogica o digital, pero su procesamiento siempre es digital, por lo que se requerirIa de una adecuación previa en caso de que la información sea analógica. Las tdcnicas de modulación digita1 8 son una parte esencial dentro del procesamiento digital de las seflales y buscan mejorar la eficiencia espectral 9 de la seflal de tal manera que se pueda obtener una transmisión de mayor calidad que sea compatible con otros servicios digitales, lo que apunta a alcanzar el objetivo de RDS. Además se puede mejorar la seguridad en la transmisión.
Las técnicas de modulación digital más utilizadas son: ASK, FSK, PSK, QAM y OFDM, en las que la portadora puede variar su frecuencia, fase y amplitud entre un nUmero limitado de niveles. Los posibles sImbolos que puede generar un sistema de transmisión digital se pueden visualizar de manera práctica mediante un "espacio de seflal" o comttnmente conocido como constelaciOn, en el cual están asociados un valor tanto de amplitud como de fase.
4.1. Diseño
QAM es un esquema de modulación multinivel que permite tener distintas combinaciones de amplitud y fase para representar una mayor cantidad de bits; la información está contenida tanto en la fase como en la amplitud.
Un sistema RDS busca obtener la mayor eficiencia posible en cada uno de sus módulos de trabajo, por lo que QAM es una de las mejores opciones a nivel de técnicas de modulación para ser implementada en este tipo de tecnologia. QAM ofrece ventajas como: gran eficiencia espectral respecto de cualquier otra técnica de modulación digital, mayor tolerancia al ruido y por ende menor tasa de errores en el proceso TxIRx. Por estas y otras razones, gran cantidad de sistemas digitales como telefonla, video por demanda, tecnologIas de redes inalámbricas como WiFI y WiMAX, sistemas de transmisión de television, microondas y satélite, y otras aplicaciones, se encuentran incursionando en ésta técnica. La implementaciOn realizada del mOdulo 1 6-QAM es una parte fundamental del sistema de transmisiOn basado en RDS que se va a desanollar.
Esquema de Modulador de amplitud en cuadratura (QAM):
Un modulador/demodulador QAM puede tener diversas variaciones, que dependen del niimero de sImbolos a representarse en los distintos niveles de amplitud y fase, como
Moduiación digital: es ci proceso por el cual los simbolos digitales, bits, se transforman en forma de onda compatible con ci medio de transrnisión o, lo que es lo mismo, con las caracterIsticas del canal. Tornado de: "Técnicas de Ingenieria de Radio", Ediciones UPC, 2003. http://www.edicionsupc.es/ftppublic/pdfmostra/TL03202M.pdf
Eficiencia espectral: Relación entre la velocidad de informaciOn en b/s y ci ancho de banda necesario en Hz. Tornado de: "Métodos de Modulación Digital", http://www.eie.fccia.unr.edu.ar/ftP/RadiOeflIaceS/I5O2.pdf
por ejemplo: 8-QAM, 1 6-QAM, 32-QAM, 64-QAM y hasta 256-QAM, generalmente representados como M-QAM. Un diagrama básico de QAM se presenta en lajigura 4.
4Bits de entrada
t
DM,o,deBits
r DAC
Señal Multinivel
I
I
Señai MultinivelQ '
LPF LPF
Oscilador local Sumador lineal
k
I
BPFI
[image:32.575.150.423.106.332.2]Senal QAM
Figura 4. Esquema de un modulador QA M
La serie de bits de entrada es tomada por un divisor de bits que será el encargado de dirigir los bits asignados como bits de fase (I) o de cuadratura (Q) hacia sus respectivos DACs. Este DAC convierte la seflal de bits en una seflal multinivel que depende del nümero de bits asignados desde el divisor segin el tipo de QAM a implementarse, este proceso también es denominado mapeo. Esta ültima seflal es ingresada a un filtro pasa bajas que limita el ancho de banda de la seflal multinivel y además permite evitar la Interferencia inter-sImbolos ISI. La siguiente etapa consiste en un mezclador de seflales, que modula las seflales con un desfase de 900 entre ellas para su posterior sumatoria lineal, aqul la salida es una seflal M-QAM con variaciones tanto en amplitud como en fase. Finalmente, el filtro pasa bandas limita el espectro de la seflal para optimizar el uso del espectro radioeléctrico.
Para entender una notación QAM es necesario conocer los parárnetros que lo definen: n = nümero de bits a la entrada del DAC
N= 2 = nümero de niveles de La sefial multinivel
M = N = námero de sImbolos posibles de representación
Por ejemplo, para un sistema 16-QAM, n=2, N=4 y M16, de donde sale La notación M-QAM.
4.2. Herramientas
Para el diseño, simulación e implementación del sistema 16-QAM se utilizó herramientas de software: Matlab'°, Simulink" y System Generator' 2 (XSG) de Xilinx y de hardware: FPGAs.
Para ver más refiérase a www.mathworks.com , http://en.wikipedia.orglwiki/MATLAB ' Para ver más refirase a www.mathworkscQ!, p/en.wikipedia.org/wiki/MATLAB
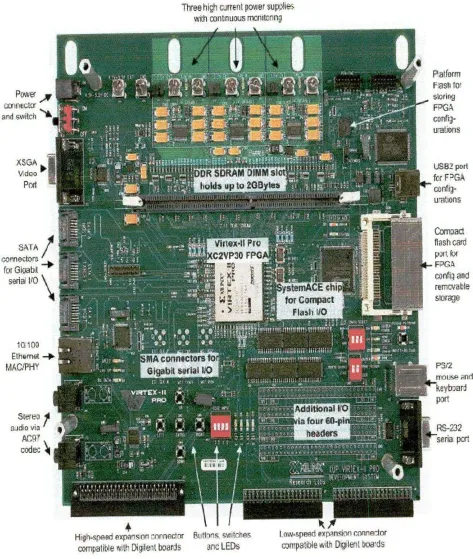
Para la implementación en FPGAs de cualquier diseflo elaborado en XSG se puede hacer uso de cualquier dispositivo de las distintas familias de FPGA de La compafiIa Xilinx' 3 por ejemplo: SpartanTM-3A DSP; Spartan-3A, AN; Spartan-3, 3E; Spartan-I!, TIE; VirtexTM5; Virtex-4; Virtex-11 Pro; Virtex-11; Virtex-E [21]. Las farnilias de dispositivos se diferencian entre si por sus caracteristicas de hardware; la elección de cualquiera de ellas se realiza en base al tipo de aplicación que se desee implementar y la cantidad de recursos que se requiera. El diseflo realizado fue implementado en la tarjeta Virtex-TI Pro por disponibilidad de la misma y porque los recursos de hardware que proporciona concuerdan con los requeridos por el diseflo.
Las tarjetas FPGAs disponibles son: Spartan-3 y Virtex-11 Pro por lo cual se mostrarán sus caracteristicas técnicas para una posterior comparación y elección de la tarj eta a utilizarse.
Spartan-3
La tab/a 2 muestra las caracterIsticas de los dispositivos X C3S50 y XC35200.
Tabla 2. CaracterIslicas de los dispositivos X C2 V P20 y X C2 V P30
Features XC3S50 XC3S200
System Gates 50K 200K
CLBs 192 480
Distributed RAM 12K 30K
Multiplier Blocks 4 12
Block RAMs 72K 216K
DCMs 2 4
Slices 768 1920
Virtex-11 Pro
La tabla 3 muestra las caracteristicas de los dispositivos XC2VP20 y XC2VP30 pertenecientes a La famiLia de tarjetas Virtex-11 Pr&4.
Tabla 3. CaracterIsticas de los dispositivos X C2 V P20 y X C2 V P30
Features XC2VP20 XC2VP30
Slices 9280 13969
Distributed RAM 290 Kb 428 Kb
Multiplier Blocks 88 136
Block RAMs 1584 Kb 2448 Kb
DCMs 8 8
PowerPC RISC Cores 2 2
Multi-Gigabit Transceivers 8 8
12 Para ver más reflérase a http://www.xilinx.com!ise/optional prod/systcm_generator.htni
13 Para ver mãs referirse a www.xilinx.com , http://es.wikipedia.orJwiki/Xi1inx 14
Para más informaciOn sobre Virtex-11 Pro referirse a Xilinx Inc., Virtex-11 Handbook,
http://www.xilnx.com/productsvirtex/handbooklifldex.htrn
Powe, wifltcttr and-witch
Pa.forrn
1:8911 to torny FPG CORfI?
wwws
4 ' I fl_
Hh-flt1 parc fw rwtr wTr1 l.i-Spfd flflWfl Crri'T.trtt
[image:34.575.43.516.102.661.2]compatit4e Dgte. brJs eric LEDs cripatiule wt DI liowds
Figura 5. V irtex-II Pro Board
. =
ct
ComDaCt flash card
FPGA confii and
rerncvable storage
js
keybr
RS-232
'4 seria pct ) ;:
for Gab E. sa O \
MA con 0 100
EDrn€t -4 MAC/PH V.
5tere udo vi
code; :
La JIgura 5 muestra una taijeta Virtex-11 Pro. Posee dos posibles variaciones de chip:
XC2VP20, XC2VP30 que difieren ünicamente en La capacidad de recursos disponibles.
Three hi crrnt pr suphe
wili nntUm.S ntrna / \.. ...
XS3A
Vdo frr EDGAUSB2 port
u8tU)flS
S/sterna de transmisiOn digital 16-QAM
orientado a "Radio definido por software" en FPGAs
tout
Traui,iulslón
yr
F^
11&411
System Resource Generator Estimator
Demo uor
Recepclóii
AnáUsis de Resuftados
_ _
I
Diagram rte oto]
_
Th-Olagrama de ojo LST
[(BIts_Th_sfl
FDATooI1
Bitl Biti I Siti
xO25tap Bst2I
—*Bit2 82j0_1F1trado
Bits
6it3 B13QL
I
61t3_Q
Q 25 tap yci
8440 Bft4_Q
Mapeo_Q Filtracrn 1
Sen e-P aralelo
I BB
1_BO_Mod
CMuItl I (constelaciori)
i5iii L(constelacion) 71 Q (constelacion) Out 4 DeIay2 Q_(constelacion) >x
x 3. Z-1 I Out
3. Q_B6_Mocl 0_SB
Serán tornados los bits de la señal de entrada de cuatro en cuatro, los dos primero bits de La serie serán asignados a la seflal de componente en fase (I) y los otros dos serán asignados a la sef'iai de componente en cuadratura (Q). Este proceso es realizado en el bloque denominado "serie-paralelo".
Una vez realizada la conversion serie-paralelo de los bits de entrada se seleccionará dos bits para ci bloque "mapeo I" y dos para "mapeo Q" . Recordemos que para 1 6-QAM se requieren señaLes de 4 niveles, razón por La que se tomó n = 2 bits. La salida de estos bloques es una señal multinivel mapeada a los valores 1, 113, -1/3 y -1. Luego se filtra Ia
seflal resultante para limitar el ancho de banda que al provenir de una señal rectangular seria muy grande, esto a su vez evitará posibles interferencias intersImboios (ISI).
Este modulador puede ser adaptado a sus distintas variaciones: 8/1 6/32/64-QAM con la asignaciOn adecuada del nümero de bits y tasas de muestreo en cada una de sus componentes de fase y cuadratura.
4.3.2. Canal de Tx
Los sistemas de comunicación usan para La transmisiOn de las seflales de informaciOn diversos medios o canales de comunicación que segün sus caracterIsticas introducen significantes niveles de ruido, distorsión e interferencia, que deben ser considerados en ci momento de simular cómo éstos influyen en el comportamiento de los sisternas de comunicaCiOfl.
Los "modeLos de canal" 15 son usados para representar la relación que existe entre La entrada y la salida de un canal de transmisión en forma matemática o de algoritmos computacionales. [22]
Debido a La aplicaciOn que tiene La tecnoLogfa RDS se escogió un modelo de canal multi-trayectoria para determinar cómo éste afectarla a un sistema de transmisión de este tipo. En este modelo se considera que los desvanecimientos de La seflal son producidos por N rutas de transmisiOn que provocan tanto atenuación como retrasos en La propagaciOn, asociados con las posibles componentes de multi-trayectoria que podria liegar a tener una seflal. Por lo tanto, la señal total recibida en ci receptor será una señal compleja, resuitado de La suma vectorial de un nOmero de componentes dispersos con fases y amplitudes aleatorias. Además, a La simulaciOn del canal se agrega ruido gaussiano que está presente en todo canal de transmisión. El modelo se presenta en La
figura 8. Esta sección no está destinada a la implementaciOn en La FPGA por lo que será
representada utilizando Onicamente herramientas de Simulink.
—Re(u) in
Chan—out
QAM_IF Ruido i QAM_Ruido
Efecto Gaussiaflo
MultitrayectOria
Figura 8. Canal de Transmisión
15 InformaciOn adicional acerca de modelamiento del canal en: "W. H. Tranter, K. S. Shanmugan, T. S.
Rappaport, K. L. Kosbar "Principles of Communication Systems Simulation with Wireless Applications", Prentice Hall, 2003.
4.3.3. Demodulador 16-QAM
Para la implementación de esta etapa nos basamos en el demo '1 6-QAM Demodulator for Software Defined Radio" elaborado por Xilinx, mismo que puede ser encontrado en ci archivo "sysgenQAMi 6.mdl ". A este diseflo se le ha agregado un bioque "demapeador" que permitirá obtener los bits que fueron transmitidos. Además, a este modelo se le puede agregar funcionalidades para que sea compatible con otras variaciones de moduladores QAM como por ejemplo: 32/64-QAM. En la figura 9 se
presenta el esquema del demodulador 1 6-QAM.
I BB
err_n
a Error
0_BE
symli
dhat_l
symO dhat 0
Adaptive Equalizer
sym_I
I (constelación) sym0 dhat_t
constellation_I
Q (constelaciOn)
constellation—0
consteflation11 dhat_0
Carrier
Recovery
Bits
constellation 01
i out V
-Ut Out
_in
[image:38.578.107.481.204.548.2]Demapper
Figura 9. V ista inlerna del dernodulador 16-QA M
Como se puede apreciar en la figura 9, los dos bloques esenciales que forman el
demodulador son: ci "ecualizador adaptativo" que se encarga de, en base a patrones definidos, mejorar la seflal recibida conforme avanza el tiempo y el bloque "recuperación de portadora" que se encarga de recuperar las componentes en cuadratura de la señal de información transmitida.
Internamente el subsistema del ecualizador adaptativo se muestra en la JIgura 10 y se encuentra conformado por "ALU" (unidad aritrnetico-logica) y "LMS Error Caic" (Algoritmo del cuadrado menos significativo para el cálculo del error).
La "ALU" está formada por dos bloques "PE ' que realizan el mismo procesamiento en paralelo con fines de eficiencia de implementación en hardware. El boque "cálculo del error LMS" en base al algoritmo LMS minimiza la diferencia entre la sefial de entrada y
dflat_Q -1 al br b_i Cmplx Mutt
la seflal ideal tomada desde el bloque "recuperación de portadora", los valores resultantes son retroalimentados hacia la "ALU".
xl xQ dhal err_I dhat_Q err, Q ALU cihat I muErr_I dhat_l dhat_Q muErr 0 det_I dhat_Q
err_n det_Q symil
err—n LMS symQ
[image:39.576.115.443.107.309.2]Error CaIc
Figura 10. V ista interna del ecualizador adaptativo
El subsistema de recuperación de portadora, mostrado en lajIgura 11, está formado por
los subsistemas "Cmplx Mult", "Phase Detector", "Cmplx Multi"," DPLL Loop Filter" y "DDS". El "Detector de fase" es uno de los bloques más importantes dentro de este subsistema debido a que es el encargado de quitar la modulación de la señal recibida y entregar una seflal proporcional a la diferencia de fase entre una seflal generada localmente y la recibida. Los bloques que realizan la rnultiplicación compleja se encargan de bajar la frecuencia de la seflal. El "filtro DPLL" es un filtro de segundo orden que en base al error de fase entregado por el "detector de fase" calcula los coeficientes. Dull ml Out2 DDS constellation_Q del I I_in det_Q pbs_err am detil - dat_Qi Phase Detector y pns_eri DPLL Loop Filter constellation Ii constellation-W1 p_r Cmpb Multi
Figura 11. V ista interna del bloque recuperación deportadora
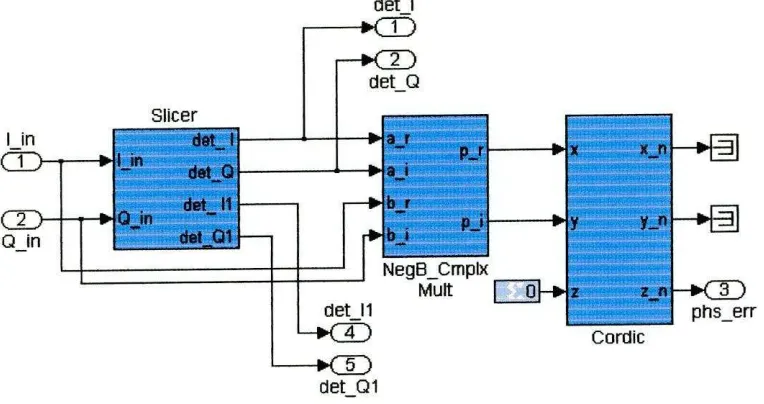
[image:39.576.95.462.494.737.2]El detector de fase mostrado en la figura 12 posee en su interior un "slicer" que es el bloque que cuantiza la seflal de entrada al valor más cercano en una constelaciOn
QAM.
El "multiplicador complejo negativo" que entrega La diferencia de fase entre la seflaL recibida y el sImbolo QAM para que sea procesado por el "Cordic" 6 de donde se obtiene el error de fase.det_Q
Slicer I
I_in dot ii
I
.
1a ________No
-1—in - - p_r
detOl 'jai
det Ii
Q_II1 dot Ol
I
I-1-
,
y
y_n
NegB_CmpIx
z_n
Mult F_01^ 2
det_Il pbs_err
Co rd Ic
[image:40.574.90.472.138.340.2]detQl
Figura 12. V ista interna del detector defase
Los retrasos en el procesamiento del demodulador son un punto crItico en el funcionamiento del mismo, pues la colocación de una latencia en un punto no adecuado, como es el caso de los bucles, provocaria la degradación total de la seflal demodulada.
4.3.4. Down-Converter
De acuerdo al diagrama de bloques de la/Igura 3, el diseflo implernentado está formado por cuatro etapas para el procesamiento de La señal IF de entrada. La primera de ellas es
la generación de un oscilador controlado numéricamente (NCO) 17 a una frecuencia de 30 MHz misma que servirá de portadora. La frecuencia del reloj de la tarj eta es la que define la frecuencia del NCO y el lImite de desplazamiento máximo de la seflal de BB a IF, asI como las frecuencias de corte de los filtros. En ci diseno realizado la maxima frecuencia del NCO a la que se puede trabajar es, segün ci teorema de Nyquist, 50 MHz menos el ancho de banda de la seflal en banda base.
La segunda etapa consiste en la multiplicación de la sefial de entrada por La portadora para bajar su frecuencia a banda base. Finalmente se utiliza un filtro LPF para obtener la seflal transmitida sin residuos de otras seflales. Este bloque requiere de un mInimo de Latencia, en este caso 14, para su implementaciOn. El subsistema se muestra en lafigura 13.
16 Mayor informaciOn sobre Cordic en: C. FL Dick "FPGA Implementation of Carrier Synchronization for
QAM Receivers", Xilinx, Inc., 2002
17
Delay
z6
Del ayi
sin
cos NCO
z3(ab)
Mult
z3(ab)
Multi
)l7tapy(
Filtrado4
J 17 tap
Filtrado5
FDATooI3
jRe(u)
c: QAMJF —lm(u)
In
I Ft down
liii
Q_FLdown
Delay4 OMulti Negate Down Sample
ut
I
I
x4 Q BB downDelay2 CMult Down Samplel
t I
c2-6
JuI
('4
a
01 I
IL
'-io'
IcrD
•I-1 Ia)
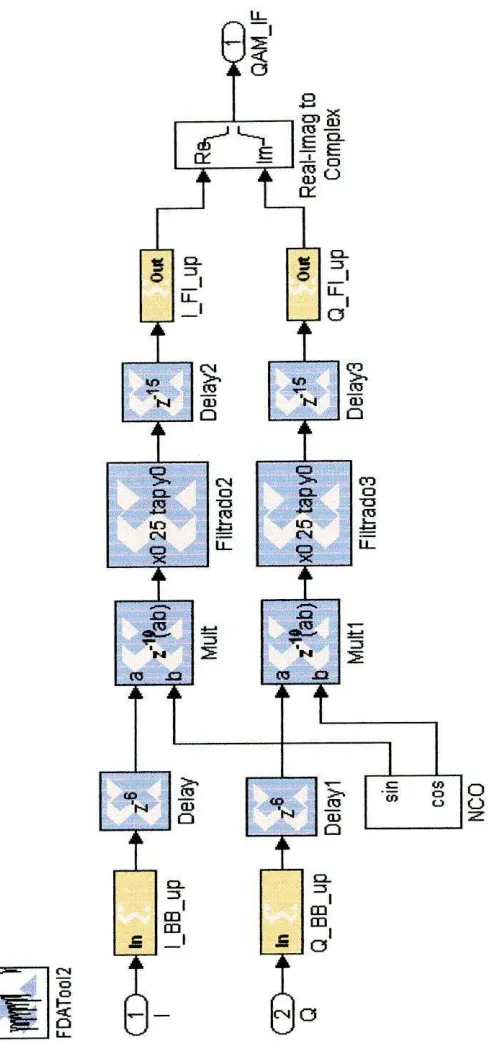
4.3.5. Up-Converter
El Up-converter, mostrado en la figura 14, está formado por tres etapas que son: el NCO, que genera una señal a la misma frecuencia que en el down-converter, la multiplicación de la portadora con la señal de banda base y el filtrado que, a diferencia del utilizado en el down-converter, es pasa-bandas y requiere una latencia de 16. Para el diseño del filtro empleado se utilizó la herramienta FDAToo1 que permite escoger: ci tipo, orden del filtro y la frecuencia de corte, en el bloque "Filtrado" es en donde Se
pueden escoger las opciones diezmado e interpolado.
Y
D ()>. (14 > c.)
C 13 _C3 fu 1
c_.4 = =
u__ LI
•,i •'
- co .Q
g
U-
>-a)
U)
0
D ED
0)
-- 0
(c 0) C-) 0
N4 13
CL lED
$jI
[image:42.573.168.412.201.728.2]('10
Figura 14. Digital up-converter
Para el presente diseño los valores de las variables utilizadas en la ecuación (1) son: Fc1k100 MHz, L= 32 bits y A= 1288490189 para obtener una frecuencia de salida de 30 MHz.
4.4. Resultados
El resultado del trabajo realizado corresponde a un sistema 16-QAM orientado a su utilizaciOn en sistemas RDS en FPGAs. Su funcionamiento seth descrito en dos partes de acuerdo a sus parámetros de análisis. Para una comparaciOn eficiente se mostrarán los resultados de los mOdulos de un sistema de transmisión simulados utilizando herramientas de Simulink, diseño mostrado en el Anexo 3, que serán comparados con los resultados obtenidos utilizando herramientas de XSG para simulación e implementación. Para otra posible comparaciOn, en caso de requerirse, se presenta un cOdigo realizado en Matlab en el Anexo 4 y sus resultados se muestran en ci Anexo 5. El bloque de co-simulaciOn para la implementación realizada del sistema 16-QAM se presenta en el Anexo 6.
Cabe recalcar que Simulink trabaja en formato de datos punto flotante, mientras que XSG trabaja en punto fijo debido a que, como es una aproximación al funcionamiento en hardware, se debe considerar la minirnización del procesamiento para obtener optimización de recursos.
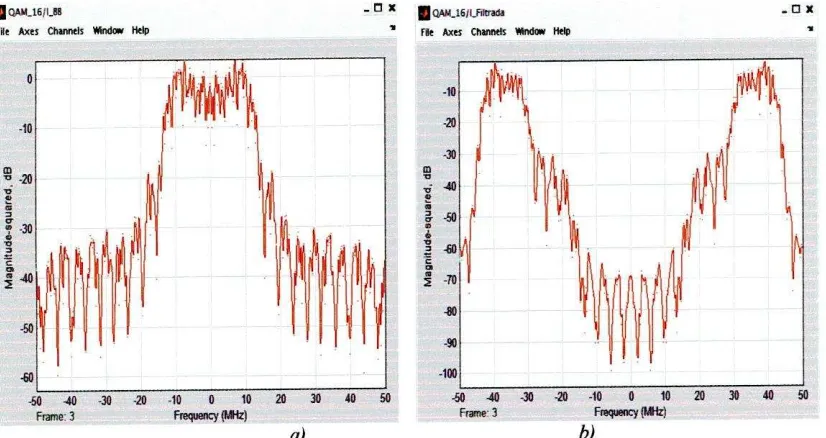
4.4.1. Digital Up-Converter y Down-Converter
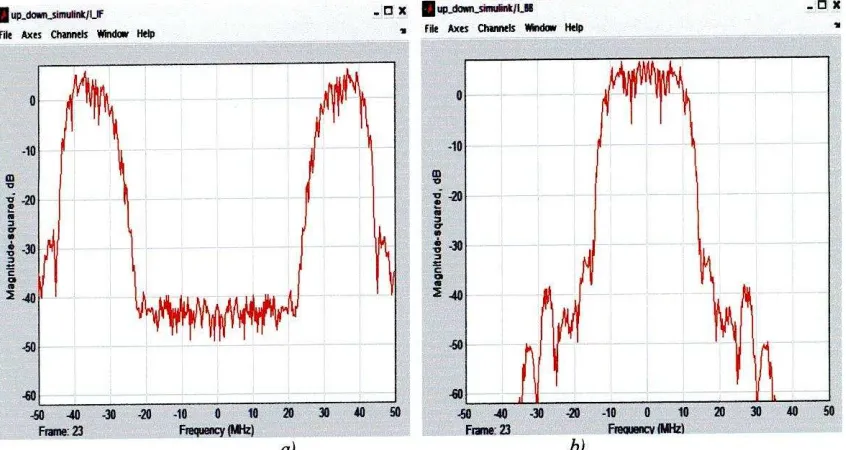
En lafigura 15 se muestra ci proceso de desplazamiento digital de la señal hacia IF para un sistema de transmisión hecho en Simulink. En la figura 16 y 17 se muestran los mismos resultados para un sistema hecho en XSG en simulación e implementaciOn respectivamente.
• xp_doxxr_simuliflk)l 0 X •sp_Ax,_siewIiHlUp_COflvr.lSieeolerkl/lFilt -13 X
File Axes Ctrsnnels Windw Atip • File Axes Ch.tsnels end Help
-Ia In -20 -30 S -40 -50 -60
'q40Frame 23
-30 -20 -ID 0 10 20 30 40 54 Frequency (MHz) -20 40 -100 -120 -6046 Frame 23 a)
Figura 15. Espectro de componente I: a) en BB y b) en IF
-30 -20 -ID 0 10 20 30 40 60 Frequency 1&lzl
b)
as as
0
T as
4
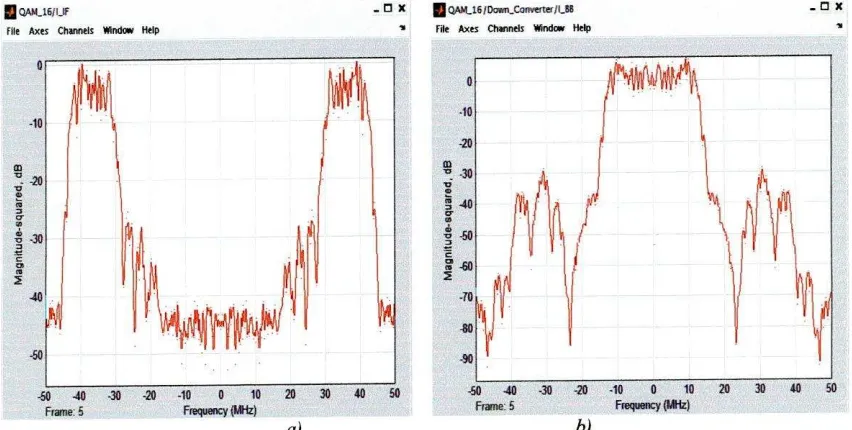
QAi&161 Up_Converter/LBS - X lQKMl4/pCoove'ter/IdrrnUv n X F/In Axes Channels Winden Kelp IFile Axes Channels Wirrden Help
-50 40 -30 -20 10 0 10 20 30 40 50 -50 40 -JO -JO -1U U IV LU .V vo Frame: 3 Frequency Hz) Frame 3 Frequency (SMz)
[image:44.573.66.487.59.271.2]a) b)
Figura 16 Especlro de componente I: a) en BB y b) en IF
Quhl_1511-88 -In X •QALI6I1-FdSnAAV 13 x
File Axes Channels Winden I-In/p Fie Axes Channels Window Help
-60 40 -30 -20 -10 0 10 20 30 40 50 -60 -40 -30 -20 -10 0 10 JO JO 415 50
Frame 3 Frequency (}-Sz) Frame 3 Frequency (P&k
a) b)
Figura 17. Espectro de componente I: a) en BB y b) en IF
Lajlgura 18 muestra el proceso de desplazamiento digital de la seflal hacia BB para un sistema de transmisión hecho en Simulink. Las figuras 19 y 20 muestran los mismos resultados para un sistema hecho en XSG tanto para la simulación como para la implementación.
[image:44.573.75.488.324.543.2]ID a
N
:3
C
a
0
:3
a
C
-50 A -30 -20 -10 0 10 20 30 40 50
Fm*: 23 FFeljency (P&1Z1
b)
ID
C
:3
ID
a
:3
C N
Iu
p doumimulIAec/LU - x •uJLdsiTnitiLU 0 FClilt Axes Channel5 WFndo Kelp vfill ?.XIS Ch1MeIS Wgxlcw Help
-50 -40 -30 -20 -10 0 10 20 30 40 50 Fm*: 23 Frecy
[image:45.574.68.491.101.326.2]a)
Fig-ura 18. Espectro de componenfe I: a) en IFy b) en BB
• - D x Ic16IJ 13
File Axes Cpainelt Wodow Help File kits Chainels tMndtw Help ID
a
C
a
-50 40 -30 -20 -10 0 10 20 30 40 50 -50 -40 -30 -20 -10 0 10 20 30 40 50
REIM S f.m,.:: 2
a) b)
Figura 19. Espectro de componente I: a) en IF b) en BB
[image:45.574.77.490.408.648.2]