INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
UNIDAD ZACATENCO
“IMPLEMENTAR
UNA RED DEVICENET PARA LA
AUTOMATIZACIÓN DE UN SISTEMA DE BANDAS
TRANSPORTADORAS”
T E S I S
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
P R E S E N T A N
JONATHAN ISRAEL GARCÍA RUÍZ
JORDI ALEJANDRO LORENZANA SÁNCHEZ
RAÚL RICARDO SALINAS JUÁREZ
A S E S O R E S
M. EN C. PEDRO FRANCISCO HUERTA GONZÁLEZ
ING. JOSÉ LUIS AGUILAR JUÁREZ
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELECTRICA
UNIDAD PROFESIONAL "ADOLFO LÓPEZ MATEOS"
TEMA DE TESIS
QUE PARA OBTENER EL TITULO DE INGENIERO EN CONTROL Y AUTOMATIZACIÓN
POR LA OPCIÓN DE TITULACIÓN TESIS COLECTIVA Y EXAMEN ORAL INDIVIDUAL DEBERA(N) DESARROLLAR C. JONATHAN ISRAEL GARCÍA RUÍZ
C. JORDI ALEJANDRO LORENZANA SÁNCHEZ C. RAÚL RICARDO SALINAS JUÁREZ
"IMPLEMENTAR UNA RED DEVICENET PARA LA AUTOMATIZACIÓN DE UN SISTEMA DE BANDAS TRANSPORTADORAS"
IMPLEMENTAR UNA RED DE COMUNICACIÓN DEVICENET PARA LA AUTOMATIZACIÓN DE DOS BANDAS ' TRANSPORTADORAS PARA USARSE EN EL LABORATORIO DE COMUNICACIONES INDUSTRIALES.
セ@ INTRÓDUCCIÓN.
セ@ MARCO TEÓRICO.
セ@ INTEGRACIÓN DEL SISTEMA.
セ@ CONFIGURACIÓN Y PROGRAMACIÓN DEL SISTEMA.
セ@ CONCLUSIONES Y RECOMENDACIONES.
MÉXICO D.F., 10 DE FEBRERO DE 2014.
ASESORES
, \\\\it M I!.?{l.:,
M. EN C. PEDRO RANCISCO HUERTA GONZALEZ セセセ _@ ' . ""_•.. c... . . . .セ⦅Lセ@ ILARJUÁREZ
[j@ セ@
(]v
J
セU@ ーGセM。イ@
DRA. LANCA MA'A:RITA
JE セdel DEPARTAMENTO . r 1 " ' . r 1 . & 1 . L J u .. . . . ' "
Página I
RESUMEN.
En el presente trabajo de tesis, se estudia, se diseña, se integra y se realiza la puesta en marcha de una red DeviceNet para la automatización de un par de bandas transportadoras del laboratorio B08 de laboratorios pesados de I.C.A. de la ESIME unidad Zacatenco, con el fin de tener un prototipo experimental enfocado a apoyar el aprendizaje de los alumnos de la carrera, brindándoles una visión práctica sobre el funcionamiento de una red industrial, tomando como ejemplo el protocolo mencionado.
En el desarrollo de esta tesis, se abordan por separado, los aspectos teóricos referentes a la topología de red DeviceNet, teoría acerca de controladores autómatas programables (PAC´s), características y funcionamiento de sensores inductivos, fotoeléctricos y de final de carrera, variadores de frecuencia ajustable y la forma en que estos manipulan motores de inducción de C.A., con los cuáles se mueven las bandas transportadoras.
En lo referente al diseño, se analizan las cargas de los dispositivos con el fin de poder dimensionar adecuadamente la alimentación para la red, tomando en cuenta las recomendaciones que plantean los manuales de planificación e instalación de redes DeviceNet, también se considera la longitud del troncal y de las líneas de derivación, para definir adecuadamente las velocidades de transmisión de datos en las cuáles puede funcionar la red.
Página II
Contenido
RESUMEN. ... I INDICE DE FIGURAS ... IV INDICE DE TABLAS ... VI
CAPÍTULO 1 INTRODUCCIÓN ... 1
1.1 INTRODUCCION Y GENERALIDADES ... 2
1.2 OBJETIVOS ... 3
1.3 JUSTIFICACIÓN... 4
1.4 ANTECEDENTES. ... 4
CAPÍTULO 2 MARCO TEÓRICO ... 6
2.1 PAC ... 7
2.1.1 ELEMENTOS DE HARDWARE DE UN PAC ... 7
A) FUENTE DE ALIMENTACIÓN ... 7
B) UNIDAD DE PROCESAMIENTO CENTRAL (CPU) ... 8
C) MÓDULOS O INTERFACES DE ENTRADAS Y SALIDAS ... 8
2.1.2 UNIDAD DE PROGRAMACIÓN PARA UN PAC ... 8
2.1.3 TÉCNICAS DE PROGRAMACIÓN DEL CONTROLADOR ... 9
2.2 BUS DE CAMPO ... 9
2.2.1 BUSES DE ALTA VELOCIDAD Y FUNCIONALIDAD MEDIA ... 11
2.3 PROTOCOLO DE COMUNICACIÓN DEVICENET ... 11
2.4 MOTOR ELÉCTRICO ... 12
2.4.1 MOTOR DE INDUCCIÓN ... 13
2.4.2 MOTOR DE INDUCCIÓN DE JAULA DE ARDILLA ... 14
2.5 VARIACIÓN DE VELOCIDAD DE MOTORES DE INDUCCIÓN ... 14
2.5.1 VARIACIÓN DE VELOCIDAD MEDIANTE RELACIÓN VOLTAJE/FRECUENCIA ... 14
2.5.2VARIADORES DE VELOCIDAD PARA MOTORES DE C.A. ... 16
2.6 VARIADORES DE FRECUENCIA ... 16
2.7 BANDAS TRANSPORTADORAS ... 17
2.8 SENSORES ... 18
2.8.1 SENSORES FOTOELÉCTRICOS ... 18
2.8.2 SENSORES INDUCTIVOS ... 18
2.8.3 SENSORES DE FINAL DE CARRERA MECÁNICOS ... 19
CAPÍTULO 3 INTEGRACIÓN DEL SISTEMA ... 20
3.1 TOPOLOGIA TIPO BUS UTILIZADA EN LA RED DEVICENET ... 21
3.2 DISEÑO DE LA TOPOLOGIA DE RED ... 22
3.2.1 LONGITUD MÁXIMA DE LA LÍNEA TRONCAL ... 23
3.2.2 LONGITUD ACUMULATIVA DE LA LÍNEA DE DERIVACIÓN ... 24
3.2.3 SELECCIÓN DE FUENTE DE ALIMENTACIÓN ... 25
A) CORRIENTE DE ALIMENTACIÓN REQUERIDA ... 25
B) INFORMACIÓN SOBRE LAS CAPACIDADES DE ALIMENTACIÓN ... 26
Página III
3.3 CABLES Y CONECTORES UTILIZADOS PARA LA COMUNICACIÓN DE LA RED ... 28
3.3.1 POWER TAP ... 29
3.3.2 TERMINACIONES EN LA RED... 30
3.3.4 CONECTORES CON AISLAMIENTO DESPLAZABLE (IDC) KWIKLINK. ... 30
3.3.5 CONECTORES. ... 30
3.4 DESCRIPCION DE LOS DISPOSITIVOS DEL SISTEMA ... 31
3.4.1 ESPECIFICACIONES DEL PAC CONTROLLOGIX 1756 SERIES ... 31
A) CHASIS 1756-A7 B ... 33
B) MÓDULO 1756-DNB/C DEVICENET ESCÁNER (NODO 0) ... 34
C) MÓDULO 1756-ENBT/A RED ETHERNET/IP ... 36
D) MÓDULOS DE ENTRADAS/SALIDAS, DIGITALES/ANALÓGICAS ... 38
3.4.2 VARIADOR DE VELOCIDAD DE C.A. DE FRECUENCIA AJUSTABLE POWERFLEX 40 (NODO 1) ... 38
A) BLOQUE DE TERMINALES DE ALIMENTACIÓN ELÉCTRICA. ... 39
3.4.3 VARIADOR DE VELOCIDAD DE C.A. DE FRECUENCIA AJUSTABLE POWERFLEX 4 (NODO 8) ... 40
A) BLOQUE DE TERMINALES DE ALIMENTACIÓN ELÉCTRICA. ... 40
B) TECLADO INTEGRAL DE LOS VARIADORES DE VELOCIDAD POWERFLEX ... 41
3.4.4 ADAPTADOR DEVICENET 22-COMM-D ... 43
A) CARACTERÍSTICAS PRINCIPALES DEL ADAPTADOR 22-COMM-D ... 43
B) MENSAJERÍA DE E/S ... 43
C) MENSAJERÍA EXPLICITA ... 44
3.4.5 DSI KIT EXTERNO DE COMUNICACIÓN ... 44
3.4.6 SENSORES DE LA RED ... 46
3.4.7 RIGHTSIGHT DEVICENET (NODO 5,6) ... 46
A) ESPECIFICACIONES ... 46
3.4.8 SENSOR 871TM DEVICENET (NODO 4) ... 48
3.4.9 SENSOR 802DN (NODO 3) ... 49
3.4.10 ESTACIÓN DE BOTONES 800E DEVICENET (NODO 7) ... 50
3.4.11 DESCRIPCION DE LAS BANDAS TRANSPORTADORAS ... 51
CAPÍTULO 4 CONFIGURACIÓN Y PROGRAMACIÓN ... 59
4.1 COMUNICACIÓN DEL PAC CON LA PC POR MEDIO DE ETHERNET ... 60
4.2 CONFIGURACIÓN DEL PAC EN EL SOFTWARE RSLOGIX 5000 ... 63
. CONFIGURACION DE LA RED POR “OFTWARE R“NETWORX FOR DEVICENET ... 69
4.4 GENERACIÓN DE TAGS CON EL SOFTWARE DEVICENET TAG GENERATOR ... 78
4.5 CONFIGURACION DE LOS NODOS Y PROGRAMACION DEL PAC ... 84
4.6 DESCRIPCIÓN DEL PROGRAMA ... 90
4.6.1 PROGRAMA PRINCIPAL. ... 90
4.6.2 SUBRUTINA 1 ... 92
4.6.3 SUBRUTINA 2 ... 95
4.6.4 TAGS UTILIZADOS PARA LA CREACION DEL PROGRAMA ... 99
Página IV
5.1 CONCLUSIONES ... 101
5.2 RECOMENDACIONES ... 101
5.3 REFERENCIAS ... 102
INDICE DE FIGURAS
FIGURA 2.1RELACIÓN ENTRE EL PAC Y EL DISPOSITIVO DE PROGRAMACIÓN ... 8FIGURA 2.2CURVA PAR-VELOCIDAD DE UN MOTOR DE INDUCCIÓN DE C.A.[11] ... 13
FIGURA 2.3CURVAS PAR-VELOCIDAD PARA VELOCIDADES POR DEBAJO DE LA VELOCIDAD BASE [12] ... 15
FIGURA 2.4CURVAS CARACTERÍSTICAS PAR-VELOCIDAD PARA TODAS LAS FRECUENCIAS.[12] ... 16
FIGURA 2.5ESTRUCTURA DEL VARIADOR DE FRECUENCIA.[13] ... 17
FIGURA 3.1INTEGRACIÓN DE LA RED DEVICENET. ... 21
FIGURA 3.2TOPOLOGÍA DE BUS. ... 23
FIGURA 3.3ALIMENTACIÓN DE LA SEÑAL DE POTENCIA. ... 27
FIGURA 3.4PUESTA A TIERRA DE LA RED. ... 28
FIGURA 3.5CABLE PLANO KWIKLINK ... 29
FIGURA 3.6CARACTERÍSTICAS DEL CONECTOR POWER TAP. ... 29
FIGURA 3.7RESISTENCIAS DE TERMINACIÓN DE CABLE PLANO. ... 30
FIGURA 3.8CONECTORES CON AISLAMIENTO DESPLAZABLE. ... 30
FIGURA 3.9CONFIGURACIÓN DE CONECTORES. ... 31
FIGURA 3.10DIMENSIONES DEL CONTROLLOGIX 1756. ... 34
FIGURA 3.11CARACTERÍSTICAS FÍSICAS DEL MÓDULO DEVICENET [20] ... 35
FIGURA 3.12CARACTERÍSTICAS FÍSICAS DEL MÓDULO ETHERNET [22] ... 37
FIGURA 3.13BORNES DE CONEXIÓN DEL POWERFLEX 40. ... 39
FIGURA 3.14BORNES DE CONEXIÓN DEL POWERFLEX 4 ... 40
FIGURA 3.15TECLADO INTEGRAL DEL VARIADOR Y MENÚS DE ACCESO. ... 41
FIGURA3.16 IDENTIFICACIÓN DE LOS COMPONENTES ... 45
FIGURA 3.17MODO DE DETECCIÓN DEL SENSOR FOTOELÉCTRICO ... 48
FIGURA.3.18INTERRUPTORES GIRATORIOS DE LA BOTONERA 800E ... 50
FIGURA 3.19DIMENSIONES PRINCIPALES DE LAS BANDAS TRANSPORTADORAS ... 51
FIGURA 3.20VISTA SUPERIOR DE LAS BANDAS TRANSPORTADORAS. ... 52
FIGURA 3.22DISTRIBUCIÓN DE LOS TABLEROS DEL SISTEMA ... 56
FIGURA 3.23RESULTADO DE LA COLOCACIÓN DE LOS DISPOSITIVOS DEL SISTEMA. ... 58
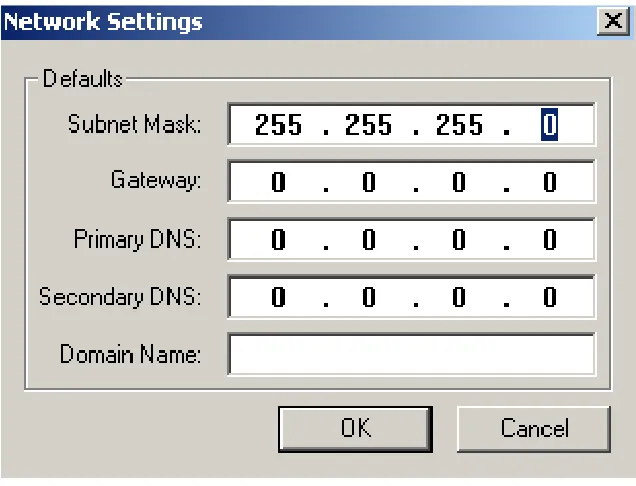
FIGURA 4.1ASIGNACIÓN DE MASCARA DE SUBRED. ... 60
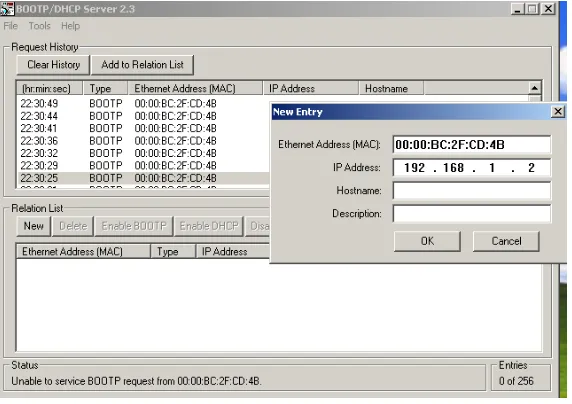
FIGURA 4.2ASIGNACIÓN DE IP AL PAC ... 61
FIGURA 4.3ELECCIÓN DEL DRIVER ETHERNET/IP ... 62
FIGURA 4.4RECONOCIMIENTO DE LA IP DE LA PC ... 62
FIGURA 4.5VERIFICACIÓN DE UNA CORRECTA COMUNICACIÓN ENTRE LA PC Y EL PAC ... 63
FIGURA 4.6SELECCIÓN DE CPU Y CHASIS. ... 64
FIGURA 4.7ÁRBOL DE PROYECTO. ... 64
FIGURA 4.18SELECCIÓN DE LOS MÓDULOS DEL PAC. ... 65
FIGURA 4.9SELECCIÓN DEL ESCÁNER DEVICENET. ... 65
FIGURA 4.10ASIGNACIÓN DE NOMBRE Y NÚMERO DE RANURA AL ESCÁNER. ... 66
FIGURA 4.11SELECCIÓN DEL MÓDULO ETHERNET. ... 67
FIGURA 4.12RECONOCIMIENTO DE LOS MÓDULOS EN EL ÁRBOL DE PROYECTO ... 68
Página V
FIGURA 4.14CREAR ARCHIVO DE CONFIGURACIÓN. ... 69
FIGURA 4.15SELECCIONAR ESCÁNER DEVICENET ... 70
FIGURA 4.16SELECCIONAR VARIADOR DE VELOCIDAD POWERFLEX 40. ... 70
FIGURA 4.17SELECCIÓN DE RELÉ DE SOBRECARGA ... 71
FIGURA 4.18SELECCIÓN DEL SENSOR FINAL DE CARRERA. ... 71
FIGURA 4.19SELECCIÓN DEL SENSOR INDUCTIVO. ... 72
FIGURA 4.20SELECCIÓN DEL SENSOR FOTOELÉCTRICO. ... 72
FIGURA 4.21SELECCIÓN DE LA ESTACIÓN DE BOTONES ... 73
FIGURA 4.22SELECCIÓN DEL VARIADOR DE VELOCIDAD POWERFLEX 4. ... 73
FIGURA 4.23IR LÍNEA CON LOS DISPOSITIVOS. ... 74
FIGURA 4.24SELECCIÓN DE COMUNICACIÓN POR DEVICENET. ... 74
FIGURA 4.25 DETECCIÓN DE ERRORES EN LOS DISPOSITIVOS. ... 75
FIGURA 4.26CARGAR INFORMACIÓN DE DISPOSITIVOS. ... 76
FIGURA 4.27ACTUALIZAR INFORMACIÓN DEL ESCÁNER. ... 76
FIGURA 4.28DESCARGAR PARÁMETROS DESDE LOS DISPOSITIVOS... 77
FIGURA 4.29CAMBIO DE DIRECCIÓN DE NODO. ... 77
FIGURA 4.30SELECCIONAR DISPOSITIVO PARA CAMBIO DE NODO. ... 78
FIGURA 4.31CARGAR PROYECTO PARA LA GENERACIÓN DE ETIQUETAS. ... 79
FIGURA 4.32PASO 2, SELECCIONAR ESCÁNER. ... 79
FIGURA 4.33PASO 3, SELECCIONAR PROYECTO EN RSNETWORX. ... 80
FIGURA 4.34PASO 4, SELECCIONAR EL NODO DEL ESCÁNER. ... 80
FIGURA 4.35PASO 5, CONFIRMACIÓN DE LA GENERACIÓN DE ETIQUETAS. ... 81
FIGURA 4.36VISTA DE ERRORES EN LA GENERACIÓN DE TAGS. ... 81
FIGURA 4.37ETIQUETAS GENERADAS... 82
FIGURA 4.38BIT DE START PF40 EN RSNETWORX. ... 83
FIGURA 4.39ETIQUETA ASIGNADA AL BIT DE START PF40 EN RSLOGIX 5000. ... 83
FIGURA 4.40CONFIGURACIÓN DEL POWERFLEX 40, ... 84
FIGURA 4.41CONFIGURACIÓN DE LA FRECUENCIA INTERNA DEL POWERFLEX 40 ... 85
FIGURA 4.42DESCARGA DE LA CONFIGURACIÓN AL DISPOSITIVO. ... 85
FIGURA 4.43CONFIGURACIÓN DEL POWERFLEX 4. ... 86
FIGURA 4.44CONFIGURACIÓN DE LA FRECUENCIA INTERNA DEL POWERFLEX 4. ... 87
FIGURA 4.45CONFIGURACIÓN DE NODO 5, SENSOR FOTOELÉCTRICO. ... 87
FIGURA 4.46CONFIGURACIÓN DE NODO 6, SENSOR FOTOELÉCTRICO. ... 88
FIGURA 4.47CONFIGURACIÓN DE NODO 7, ESTACIÓN DE BOTONES. ... 88
FIGURA 4.48CONFIGURACIÓN DE NODO 3, INTERRUPTOR DE LÍMITE. ... 89
FIGURA 4.49CONFIGURACIÓN DE NODO 4, SENSOR INDUCTIVO. ... 89
FIGURA 4.50SELECCIÓN DE LA OPCIÓN DISABLE KEYING . ... 90
FIGURA4.51PROGRAMA PRINCIPAL, LLAMADA A SUBRUTINAS. ... 91
FIGURA4.52(A),(B),(C)DIAGRAMA DE ESCALERA, SUBRUTINA 1. ... 95
FIGURA 4.53DIAGRAMA DE ESCALERA, SUBRUTINA 2(A)(B)(C). ... 98
FIGURA 4.54PONER AL ESCÁNER EN RUN. ... 98
Página VI
INDICE DE TABLAS
TABLA 2.1PRINCIPALES CARACTERÍSTICAS DE DEVICENET ... 12
TABLA 3.1DISPOSITIVOS DE LA RED ... 21
TABLA 3.2VELOCIDAD DE TRANSMISIÓN EN RELACIÓN A LA LONGITUD DEL CABLE.[27] ... 24
TABLA 3.3LONGITUD ACUMULATIVA DE LA LÍNEA DE DERIVACIÓN.[27] ... 24
TABLA 3.4 VALORES DE CORRIENTE DE CONSUMO DE CADA ELEMENTO. ... 25
TABLA 3.5CORRIENTE MÁXIMA DE LA LÍNEA DE DERIVACIÓN. ... 26
TABLA 3.6CABLES UTILIZADOS EN LA RED.[27] ... 28
TABLA 3.7CABLE DE DERIVACIÓN. ... 29
TABLA 3.8CLASIFICACIÓN DE CONECTORES. ... 31
TABLA 3.9CARACTERÍSTICAS DEL PACCONTROLLOGIX 1756-L61.[18] ... 32
TABLA 3.10MÓDULOS DE ENTRADAS/SALIDAS DEL PAC.[18] ... 32
TABLA 3.11MÓDULOS DE COMUNICACIÓN DEL PAC. ... 33
TABLA 3.12CARACTERÍSTICAS PRINCIPALES DEL CHASIS. ... 33
TABLA 3.13DATOS TÉCNICOS DEL MÓDULO 1756-DNB[20] ... 36
TABLA 3.14ESPECIFICACIONES DEL MÓDULO 1756-ENBT[22] ... 37
TABLA 3.15VARIADOR DE FRECUENCIA AJUSTABLE.[28] ... 39
TABLA 3.16REFERENCIA DE LOS BORNES DE CONEXIÓN.[28] ... 39
TABLA 3.17VARIADOR DE FRECUENCIA AJUSTABLE POWERFLEX 4.[30] ... 40
TABLA 3.18ESTADO DE LOS LED´S INDICADORES.[28] ... 41
TABLA 3.19COMPARACIÓN ENTRE VARIADORES ... 42
TABLA 3.20ESPECIFICACIONES, ADAPTADOR DEVICENET 22-COMM-D. ... 44
TABLA 3.21ESPECIFICACIONES DEL ADAPTADOR DSI. ... 45
TABLA 3.22 IDENTIFICACIÓN DE LOS COMPONENTES. ... 45
TABLA 3.23ESPECIFICACIONES ÓPTICAS DEL SENSOR FOTOELÉCTRICO [33] ... 46
TABLA 3.24ESPECIFICACIONES ELÉCTRICAS DEL SENSOR FOTOELÉCTRICO ... 47
TABLA 3.25ESPECIFICACIONES DE COMUNICACIÓN DEL SENSOR FOTOELÉCTRICO ... 47
TABLA 3.26ESPECIACIONES DE INTERFACE DE USUARIO DEL SENSOR FOTOELÉCTRICO ... 47
TABLA 3.27 ESPECIFICACIONES TÉCNICAS DEL SENSOR 871TM DEVICENET [34] ... 48
TABLA 3.28INDICADORES DE ESTADO ... 49
TABLA 3.29CARACTERÍSTICAS FÍSICAS SENSOR FINAL DE CARRERA ... 50
TABLA 3.30ALIMENTACIÓN DE LA ESTACIÓN DE BOTONES... 51
TABLA 3.31ESPECIFICACIONES DE ENTRADA EXTERNA ... 51
TABLA 3.32ESPECIFICACIONES DE SALIDA EXTERNA. ... 51
TABLA 3.33PLACA DE DATOS DE LOS MOTORES DE INDUCCIÓN. ... 52
TABLA 3.34PLACA DE DATOS DE LA CAJA REDUCTORA ... 53
Página 1
CAPÍTULO 1 INTRODUCCIÓN
Página 2
1.1 INTRODUCCIÓN Y GENERALIDADES
El protocolo de comunicación DeviceNet originalmente fue desarrollado por Rockwell Automation (Allen-Bradley), una organización que proporciona soluciones de control e información de automatización industrial, en el año de 1993, DeviceNet es una de las redes de dispositivos más populares y de mayor penetración en el mercado americano, cubriendo en EUA cerca del 60% de las redes de su tipo, encontrándose en las más diversas aplicaciones en la industria nacional, desde la gran minería hasta la industria salmonera y alimenticia, sin olvidar la importancia en la industria de la celulosa.
En México, está presente en las industrias, principalmente en las americanas, debido a la cercanía y relación con EUA, de esto no existe gran información pero en experiencias laborales, en el país existen fabricantes y vendedores de esta red de campo como industrias que lo adquieren, empresas como Schneider Electric, Omron, General Electric, ABB, Emerson Electric Company, Allen Bradley son ejemplo de algunas empresas que distribuyen soluciones con este protocolo de comunicación a empresas como PEMEX, CFE, Grupo Modelo, Fabricas de Jabón la Corona, Holcim Apasco, por mencionar algunas.
Esta plataforma fue adoptada por la Open DeviceNet Vendor Association, OVDA, una organización no lucrativa fundada en 1995 para apoyar mundialmente la evolución de sus especificaciones, agrupando a más de 300 proveedores de dispositivos de control para automatización de plantas. Su misión es la de promover la normalización de este protocolo en todo el mundo y propiciar la mejoría de las funcionalidades de la norma con el fin de satisfacer las necesidades de conectividad de la planta moderna basándose en tecnologías del CIP (Common Industrial Protocol). [1]
La red DeviceNet es un protocolo de comunicación que proporciona conexión en red de control e información abierta a nivel de dispositivo para dispositivos industriales simples. Admite la comunicación entre sensores, actuadores y dispositivos como controladores programables y computadoras. Tiene la ventaja que mediante un sólo cable con 4 hilos es posible establecer alimentación eléctrica y el envío de señales a los dispositivos involucrados en la red, admite aplicaciones estándar y de seguridad en el cable referido. Ofrece opciones de cableado simples y rentables. [2]
Página 3
reducir el tiempo improductivo, con la detección temprana de problemas de rendimiento del sistema. [3]
Esta red se desarrolló a fin de satisfacer las necesidades de la industria de contar con un medio de comunicación que fuera aceptado universalmente y que tuviera la capacidad de aceptar la mayoría de los dispositivos empleados a nivel campo. Además de leer el estado de los dispositivos conectados a la red, tiene la capacidad de reportar distintos tipos de información, por ejemplo temperaturas, leer la corriente de carga en un arrancador de motor, cambiar la velocidad del impulsor de un motor o contar el número de envases que han pasado en una banda transportadora. Esta red es comúnmente utilizada en la industria para aplicaciones como ensamblado de piezas, máquinas de soldadura, captaciones de sensores distribuidos, sensores inteligentes, válvulas neumáticas, lectores de códigos de barras, interfaces de operador, etc.
1.2 OBJETIVOS
El objetivo general del presente trabajo de tesis es:
Implementar una red de comunicación DeviceNet para la automatización de dos bandas transportadoras para usarse en el laboratorio de comunicaciónes industriales en el área de laboratorios pesados 1 de la ESIME unidad Zacatenco.
En lo particular, el presente trabajo, busca satisfacer los objetivos específicos que se plantean a continuación.
Integrar un sistema de dos bandas transportadoras cuyo movimiento será manipulado por motores de inducción mediante variadores de velocidad.
Implementar la red DeviceNet para comunicar a los dispositivos de campo como son los sensores, variadores y el PAC.
Página 4
1.3 JUSTIFICACIÓN
A fin de recalar la importancia que tienen las redes tipo bus dentro de la industria y en especifico para la automatización de procesos y la integración de dispositivos de gran variedad, se lleva a cabo la integración, implementación, programación y puesta en marcha de un prototipo experimental encaminado a la automatización de un sistema de bandas transportadoras por medio de una red DeviceNet, que es, como se explica más adelante una opción económica, fácil de implementar y a la cual se tiene acceso por las características de los dispositivos con los que cuenta el laboratorio de PAC´s.
En este prototipo experimental, es posible comprobar el enlace e intercambio de información que se logra entre sensores, variadores de velocidad, PAC´s, botoneras, también se realiza la programación de algunas rutinas para comprobar el correcto funcionamiento de la red de campo.
1.4 ANTECEDENTES.
En el año 2007, en la Universidad Austral de Chile, en la facultad de Ciencias de la Ingeniería, de la Escuela de Electricidad y Electrónica, se realizo un trabajo de tesis, enfocado al estudio de aplicación de los estándares DeviceNet y ControlNet como solución a comunicaciónes industriales de redes de campo y proceso en plantas industriales.
En dicho trabajo se resalta el auge y rápido desarrollo de este tipo de redes en la década de los 80´s dado como solución para aplicaciones de control dentro de la industria automotriz en el cual se buscaba la interconexión entre una amplia gama de dispositivos sencillos o de bajo nivel (sensores por ejemplo) y de alto nivel (controladores) para el intercambio de datos entre cada uno de ellos y una interoperación entre los dispositivos de varios fabricantes. [4]
En el trabajo de tesis se llego a la conclusión que tras la implementación de una red DeviceNet en una planta, existen beneficios como reducción en gastos de instalación, es menor el tiempo de la habilitación y puesta en marcha, además que ofrece resultados en reducción de tiempo improductivo de producción en comparación a lo que podían ofrecer la instalación de otro tipo de redes.
Página 5
También se concluyó que de las aplicaciones de una red DeviceNet, la principal es referente a redes de variadores de velocidad (dispositivos para el control de motores) debido a la inmunidad al ruido eléctrico con que cuenta, aunado a un costo razonable, es una efectiva solución de comunicación a nivel industrial.
Por lo tanto, este trabajo da pauta hacia el análisis, integración y puesta en marcha de una red de este tipo, objeto del presente trabajo de tesis.
En agosto de 2010, en Quito, Ecuador, en la Escuela Politécnica Nacional se presentó una tesis que plantea la construcción de un módulo didáctico para una red DeviceNet como apoyo para la asignatura de comunicaciónes industriales, su fin era controlar motores a través de variadores de velocidad conectados como esclavos, controlados por medio de un PLC con módulo escáner DeviceNet.
Parten de la necesidad existente en la industria de que los procesos de producción no pueden estar aislados de los procesos de planificación y gestión dentro de cualquier organización, las empresas hoy en día buscan implementar sistemas integrados de manufactura (CIM) con el fin de mejorar niveles de calidad y optimizar en todo aspecto los procesos, desde que ingresa la materia prima hasta que se comercializa el producto, por tanto, es necesario obtener la mayor información en tiempo real del estado de los procesos, que es en donde intervienen los buses de campo y donde se muestra la importancia que tienen. [5] Se concluye en dicho trabajo que frente a otras redes, DeviceNet se presenta como la primera opción para el desarrollo de sistemas de automatización, debido a su bajo costo y gran cantidad de dispositivos disponibles por ser un protocolo de comunicación abierto para el cual distintos fabricantes se han sumado al desarrollo de dispositivos y elementos.
La instalación y puesta en marcha de una red DeviceNet es rápida comparada con la de redes similares, tienen una velocidad aceptable de transmisión de datos. En septiembre de 2010, en Latacunga, Ecuador, en la escuela Politécnica del Ejército, se presentó un trabajo de tesis enfocado al diseño e implementación de un sistema de supervisión utilizando una red DeviceNet donde analizan el continuo avance en la industria con respecto al control y monitoreo de los procesos para obtener mejoras en cuanto a administración de la producción, lo que conlleva a la necesidad de instalar herramientas necesarias como una red DeviceNet para la supervisión cuidadosa y sistemática de la información. [6]
Página 6
CAPÍTULO 2 MARCO TEÓRICO
Página 7
2.1 PAC
Un controlador de automatización programable (PAC) es un equipo electrónico basado en un microprocesador o microcontrolador, que tiene generalmente una configuración modular, puede programarse en lenguaje no informático y está diseñado para controlar de una manera rápida y en ambiente industrial procesos que presentan un desarrollo secuencial, es una tecnología industrial orientada al control automático de procesos, sistemas o maquinas. [7]
El PAC surge con la propuesta de incluir procesadores rápidos, baratos, y tener una herramienta de programación potente. Las organizaciones pretendían un mejor manejo de datos y la posibilidad de crear redes con mayor facilidad así como contar con mayor opción para la comunicación con distintos dispositivos e intercambiar datos. Así nació el PAC, en los 90´s con mayor apertura, con mayor capacidad de comunicación, varios idiomas, permitiendo aplicaciones multi tarea en comparación a los PLC´s que hasta el momento se utilizaban. [10]
El PAC se refiere al conjunto formado por un controlador, módulos de entradas y salidas, y uno o múltiples buses de datos que interconectan diferentes tipos de dispositivos. Este controlador combina eficientemente la fiabilidad de control de un controlador lógico programable o PLC junto a la flexibilidad de monitorización y cálculo de una PC. A veces incluso se le une la velocidad y personalización de la microelectrónica. Los PAC´s son típicamente utilizados en el ámbito industrial, para control de máquinas y procesos. [7]
Los PAC´s se comunican usando los protocolos de red abiertos como TCP/IP, OPC, SMTP, puerto serie (con Modbus por ejemplo), etc., y es compatible con los privados (CAN, Profibus, etc.).
2.1.1 ELEMENTOS DE HARDWARE DE UN PAC
La estructura en cuanto a hardware de un PAC, es la siguiente:
A) FUENTE DE ALIMENTACIÓN
Página 8
B) UNIDAD DE PROCESAMIENTO CENTRAL (CPU)
Es el elemento más complejo e imprescindible del PAC, está diseñada a base de microprocesadores y memorias, contiene una unidad de control, su función es leer los estados de las señales de entradas, ejecutar el programa de control y gobernar las salidas, el procesamiento es permanente y a una gran velocidad, esto, dependiendo de las características del CPU con que se cuente.
C) MÓDULOS O INTERFACES DE ENTRADAS Y SALIDAS
Son los elementos que proporcionan el vínculo entre la CPU del PAC y los dispositivos de campo. A través de ellos se origina el intercambio de información, ya sea para la adquisición de datos o la del mando para el control de los dispositivos pertenecientes al proceso. Debido a la existencia de una gran variedad de dispositivos externos (sensores, actuadores), es posible utilizar para un PAC distintos tipos de módulos de entradas y salidas para manejar cierto tipo de señal, a determinados valores de tensión o corriente en C.D. o C.A. Estos módulos pueden ser:
Módulos de entradas/salidas analógicas.
Módulos de entradas/salidas digitales.
2.1.2 UNIDAD DE PROGRAMACIÓN PARA UN PAC
Es el medio de comunicación entre el hombre y el PAC, típicamente utiliza una computadora, que se conecta al controlador por medio de una interfaz, para el intercambio de datos.
La figura 2.1 muestra la relación de los elementos que componen a un controlador de automatización programable y el ciclo que atraviesa la información entre la unidad de programación y el controlador.
Página 9
2.1.3 TÉCNICAS DE PROGRAMACIÓN DEL CONTROLADOR
El dispositivo de programación, permite mediante las instrucciones del PAC, desarrollar el programa de usuario; posteriormente se transfiere a la memoria de programa de usuario. Una memoria típica permite almacenar miles de instrucciones con datos de bit, y es del tipo lectura/escritura, permitiendo la modificación del programa tantas veces como sea necesario, además el módulo del procesador, cuenta con una batería para mantener a salvo la programación si no se cuenta con alimentación de la red eléctrica. [7], [9]
La programación consiste en el establecimiento de una sucesión ordenada de instrucciones que están disponibles en el software de programación y que resuelven el control sobre un proceso determinado. No existe una descripción única para cada lenguaje, sino que cada fabricante utiliza una denominación particular para las diferentes instrucciones y una configuración también particular para representar las distintas variables externas o internas.
Para el desarrollo de este trabajo, se utiliza el lenguaje de programación en escalera, el cual es un lenguaje gráfico, derivado del lenguaje de relevadores, que mediante símbolos, representa contactos, solenoides, etc. Para las funciones lógicas más complejas (módulos de programación) como temporizadores, contadores, registros de desplazamiento, etc. Se emplea el formato de bloques. Estos no están normalizados, aunque guardan una gran similitud entre sí para distintos fabricantes. Su principal ventaja es que los símbolos básicos están normalizados según normas NEMA y son empleados por todos los fabricantes. Dichos símbolos se representan entre dos líneas verticales que simbolizan las líneas de alimentación.
También existen otros lenguajes de programación que en este trabajo no son utilizados, sin embargo se mencionan a continuación:
Lenguaje en lista de instrucciones
Diagrama a bloques
Estructurado
Grafcet
2.2 BUS DE CAMPO
Página 10
conexiones punto a punto entre los elementos de campo y el equipo de control a través del tradicional bucle de corriente de 4-20mA. Un bus de campo es una red digital, bidireccional, multipunto, montada sobre un bus serie, que conecta
dispositivos de campo como PLC’s, transductores, actuadores y sensores. Cada
dispositivo de campo incorpora cierta capacidad de proceso, que lo convierte en un dispositivo inteligente, manteniendo siempre un bajo costo. Cada uno de estos elementos es capaz de ejecutar funciones simples de diagnóstico, control o mantenimiento y comunicarse bidireccionalmente a través del bus. [8]
El objetivo de un bus de campo es reemplazar los sistemas de control centralizados por redes de control distribuido mediante el cual permita mejorar la calidad del producto, reducir los costos y mejorar la eficiencia de los procesos. Para ello se basa en que la información que envían y/o reciben los dispositivos de campo es digital, lo que resulta mucho más preciso que si se recurre a métodos analógicos. Cada nodo de la red puede informar en caso de fallo del dispositivo asociado, y en general sobre cualquier anomalía asociada al dispositivo. Esta monitorización permite aumentar la eficiencia del sistema y reducir la cantidad de horas de mantenimiento necesarias.
Las principales ventajas de utilizar un bus de campo a diferencia de una red de comunicación punto a punto son las siguientes:
La reducción de costos.
El ahorro proviene fundamentalmente de tres fuentes: ahorro en costo de instalación, ahorro en el costo de mantenimiento y ahorros derivados de la mejora del funcionamiento del sistema. Una de las principales características de los buses de campo es su significativa reducción en el cableado necesario para el control de una instalación. Cada componente sólo requiere un cable para la conexión de los diversos nodos. Se estima que puede ofrecer una reducción de 5 a 1 en los costos de cableado, dispone de herramientas de administración que permiten la reducción del número de horas necesarias para la instalación y puesta en marcha.
Administración de la información
Página 11
Comunicación entre todos los elementos
Con la tecnología de los buses de campo, se permite la comunicación bidireccional entre los dispositivos de campo y el controlador, pero también entre los propios dispositivos de campo.
2.2.1 BUSES DE ALTA VELOCIDAD Y FUNCIONALIDAD MEDIA
Se basan en el diseño de una capa de enlace para el envío eficiente de bloques de datos de tamaño medio. Estos mensajes permiten que el dispositivo tenga mayor funcionalidad de modo que permite incluir aspectos como la configuración, calibración o programación del dispositivo. Son buses capaces de controlar dispositivos de campo complejos, de forma eficiente y a bajo costo. Normalmente incluyen la especificación completa de la capa de aplicación, lo que significa que se dispone de funciones utilizables desde programas basados en ordenadores para acceder, cambiar y controlar los diversos dispositivos que constituyen el sistema. Algunos incluyen funciones estándar para distintos tipos de dispositivos que facilitan la interoperabilidad de dispositivos de distintos fabricantes. Algunos ejemplos de este tipo de redes son:
DeviceNet: Desarrollado por Allen-Bradley, utiliza como base el bus CAN, e incorpora una capa de aplicación orientada a objetos.
LONWorks: Red desarrollada por Echelon.
BitBus: Red desarrollada por INTEL.
DIN MessBus: Estándar alemán de bus de instrumentación, basado en comunicación RS-232.
InterBus-S: Bus de campo alemán de uso común en aplicaciones medias. Como se menciona, DeviceNet es un bus de alta velocidad y funcionalidad media.
2.3 PROTOCOLO DE COMUNICACIÓN DEVICENET
Bus basado en el protocolo CAN. Su capa física y capa de enlace se basan en ISO 11898, y en la especificación de Bosch 2.0. DeviceNet define una de las más sofisticadas capas de aplicaciones industriales sobre bus CAN.
Página 12
Es posible la conexión de hasta 64 nodos con velocidades de 125 Kbps a 500 Kbps en distancias de 100 a 500 m.
Utiliza una definición basada en orientación a objetos para modelar los servicios de comunicación y el comportamiento externo de los nodos. Define mensajes y conexiones para funcionamiento maestro-esclavo, interrogación cíclica, "strobing" o lanzamiento de interrogación general de dispositivos, mensajes espontáneos de cambio de estado, comunicación uno-uno, modelo productor-consumidor, carga y descarga de bloques de datos y ficheros etc.
DeviceNet ha conseguido una significativa cuota de mercado. Existen más de 300 productos homologados y se indica que el número de nodos instalados superaba los 300.000 en 1998, Está soportado por numerosos fabricantes: Allen-Bradley, ABB, Danfoss, Crouzet, Bosch, Control Techniques, Festo, Omron, .etc. en la tabla 2.1 se muestra un resumen de las principales características de la red.
Tabla 2.1 Principales características de DeviceNet
Tamaño de la red 64 nodos
Longitud de la red 500 metros a 125 kbps 250 metros a 250 kbps 100 metros a 500 kbps
Medio físico Línea troncal y derivaciones con 4 hilos Paquetes de datos 0 a 8 bytes
Método de intercambio de información
Maestro/Esclavo. Multi maestro
2.4 MOTOR ELÉCTRICO
Un motor eléctrico es una máquina eléctrica que transforma energía eléctrica en energía mecánica por medio de interacciones electromagnéticas. Algunos de los motores eléctricos pueden transformar energía mecánica en energía eléctrica funcionando como generadores. Todo motor tiene que estar formado con polos alternados entre el estator y el rotor, ya que los polos magnéticos iguales se repelen, y polos magnéticos diferentes se atraen, produciendo así el movimiento de rotación.
Página 13
pasa a través de un conductor situado en el interior de un campo magnético, éste ejerce una fuerza mecánica o f.e.m. (fuerza electromotriz), sobre el conductor. Los motores de C.A. se dividen en general en los siguientes tipos: motores de inducción, motores de conmutación de series, motores síncronos, motores de estator o rotor alimentados y motores de polos conmutables. Los motores con los que cuentan las bandas transportadoras del presente trabajo, son motores de inducción de jaula de ardilla, por lo que se explica a continuación su funcionamiento y características. [12]
2.4.1 MOTOR DE INDUCCIÓN
El motor de inducción basa su funcionamiento en la acción de un flujo giratorio producido en el estator (bobinado primario). Éste flujo corta los conductores del bobinado del rotor (bobinado secundario) e induce fuerzas electromotrices, dando origen a corrientes en los conductores del rotor.
Es el más extensamente usado en maquinas de C.A. en aplicaciones de suministro eléctrico. Operan desde suministros multi-fase, este tipo de motores son robustos en su construcción y proporcionan características de par útil, un ejemplo de estos se muestra en la figura 2.2 haciendo esto eminentemente adecuado para un amplio rango de aplicaciones. [11]
Es usado como un componente de sistemas de velocidad variable, está limitado por el rendimiento fundamental de la maquina; como la velocidad de operación depende de la frecuencia suministrada, con el fin de emplear motores de inducción en aplicaciones que requieren velocidad variable es necesario alimentar el motor con alguna forma de frecuencia variable o emplear algún medio para cambiar el equilibrio de tensión interna.
Página 14
2.4.2 MOTOR DE INDUCCIÓN DE JAULA DE ARDILLA
Como el nombre implica el devanado del rotor de una máquina de jaula está construida a partir de conductores a base de barras de cobre, aluminio u otras aleaciones dispuestas alrededor del rotor en la forma de una jaula.
No hay conexión eléctrica entre el estator y el rotor, la corriente que fluye en el rotor no puede ser cambiada arbitrariamente desde afuera del motor. Por lo tanto es posible alterar la velocidad por el cambio de frecuencia, por cambio en el número de polos, por deslizamiento, por la variación en tensión o corriente.
2.5 VARIACIÓN DE VELOCIDAD DE MOTORES DE INDUCCIÓN
Existen sólo dos técnicas para variar la velocidad de un motor de inducción, una de las cuales consiste en variar la velocidad síncrona (velocidad de los campos magnéticos del rotor y estator) la cual está dada por la ecuación 1. La otra técnica consiste en variar el deslizamiento del motor para una carga dada. [11]
La velocidad síncrona de un motor de inducción está dada por:
Ecuación No. 1 Donde:
nsinc = numero de revoluciones por minuto. fe= frecuencia de línea.
P= número de polos.
Por tanto las únicas formas en que se puede variar la velocidad síncrona de la máquina son: cambiando la frecuencia eléctrica y cambiando el número de polos de la máquina.
2.5.1 VARIACIÓN DE VELOCIDAD MEDIANTE RELACIÓN VOLTAJE/FRECUENCIA
Página 15
(velocidad del motor en condiciones nominales) es necesario reducir el voltaje aplicado a las terminales del estator para obtener una operación adecuada.
El voltaje aplicado a las terminales del estator deberá disminuir linealmente con la disminución de la frecuencia en él. Este proceso se llama degradación. Si esto no se hace, se saturará el acero del núcleo del motor de inducción y fluirán corrientes de magnetización excesivas en la máquina. Si la frecuencia eléctrica aplicada al estator disminuye en 10% mientras que la magnitud del voltaje aplicado al estator permanece constante, el constante del flujo en el núcleo del motor se incrementará cerca del 10%, al igual que la corriente de magnetización. [12]
La figura 2.3 muestra una familia de curvas características par velocidad del motor de inducción para velocidades menores a la nominal, suponiendo que la magnitud del voltaje del estator varía linealmente con la frecuencia.
Figura 2.3 Curvas par-velocidad para velocidades por debajo de la velocidad base [12]
Cuando el voltaje aplicado a un motor de inducción varía linealmente con la frecuencia por debajo de la velocidad nominal, el flujo de campo magnético en el motor permanece aproximadamente constante.
Página 16
Figura 2.4 Curvas características par-velocidad para todas las frecuencias.[12]
2.5.2VARIADORES DE VELOCIDAD PARA MOTORES DE C.A.
Los motores eléctricos generalmente operan a velocidad constante, y con valores que dependen de la alimentación y de las características propias del motor, los cuales no se pueden modificar fácilmente. Para lograr regular la velocidad de los motores, se emplea un controlador especial que recibe el nombre de variador de velocidad. Los variadores de velocidad se emplean en una amplia gama de aplicaciones industriales, como en ventiladores y equipo de aire acondicionado, equipo de bombeo, bandas transportadoras, elevadores, llenadoras, tornos y fresadoras, etc. Un variador de velocidad puede consistir en la combinación de un motor eléctrico y el controlador que se emplea para regular la velocidad del mismo. [12]
El control de procesos y el ahorro de la energía son dos de las principales razones para el empleo de variadores de velocidad.
2.6 VARIADORES DE FRECUENCIA
Al ser el motor asíncrono una máquina donde la velocidad depende de la frecuencia, al modificar ésta, se consigue variar la velocidad. Los sistemas electrónicos que transforman la frecuencia de la red en otra frecuencia variable en el motor, se denominan sistemas inversores. Éstos están formados por:
Página 17
proporcionar a la entrada del inversor una tensión prácticamente continua, sin rizado.
Un inversor que transforma tensión C.D. Obtenida a la salida del bloque rectificador en tensión alterna, de frecuencia diferente a la de la red.
El circuito de control, es un circuito electrónico que se encarga de generar las tensiones de control y de referencia y, en función de éstas, abrir y cerrar los tiristores al ritmo que impone la frecuencia de la tensión de referencia. Este sistema permite obtener una amplia gama de frecuencias y niveles de tensión en el motor, y por tanto diferentes velocidades.
Los variadores de velocidad de motores asíncronos se presentan comercialmente en módulos, adaptables para diferentes campos de aplicación y entornos industriales. [13]
Están provistos de elementos de diálogo, pantallas de cristal líquido y teclado, Para visualizar las magnitudes de funcionamiento del motor; estado del variador y configuración del variador según la aplicación (frecuencia de trabajo, límites de velocidad, modos de parada, selección de ajustes). Se muestra la estructura interna de un variador de velocidad en la figura 2.5
Figura 2.5 Estructura del variador de frecuencia. [13]
2.7 BANDAS TRANSPORTADORAS
Página 18
Existen varios tipos de bandas transportadoras de acuerdo al material que se requiere movilizar, así pues se pueden encontrar bandas transportadoras de mercancías terminadas o en proceso dentro de una línea de producción como el ensamble de componentes automotrices o embotelladoras y empacadoras, también hay trayectorias curvas como las de reclamo de equipaje utilizadas en los aeropuertos. [14]
2.8 SENSORES
Un sensor es un dispositivo diseñado para recibir información de una magnitud del exterior y transformarla en otra magnitud, normalmente eléctrica, que pueda ser cuantificada y manipulada.
Podemos encontrar interruptores, pulsadores accionados de forma mecánica o manual contactos auxiliares de contactores activados por la bobina de un contador; contactos auxiliares de relés térmicos, relés tipo reed, colocados sobre las camisas de los cilindros neumáticos y activados por el embolo magnético del cilindro; finales de carrera activados por desplazamiento de piezas móviles, etc. [7] Los sensores que se utilizan en este trabajo, son descritos a continuación.
2.8.1 SENSORES FOTOELÉCTRICOS
El funcionamiento de los sensores fotoeléctricos está basado en la generación de un haz luminoso por parte de un fotodiodo emisor, que se proyecta bien sobre un foto receptor, o bien sobre un dispositivo reflectante.
La interrupción o reflexión del haz por parte del objeto a detectar, provoca el cambio de estado de la salida de la fotocélula. [8], [15], [16],
2.8.2 SENSORES INDUCTIVOS
Los sensores inductivos son interruptores electrónicos que trabajan sin contacto. Estos sensores no sólo proporcionan una señal ON/OFF (Detector), sino también una señal análoga proporcional a la distancia. [15], [16]
Página 19
entra en la zona del campo magnético cambiante, se generan pérdidas por corrientes circulantes en la pieza esto hace que el circuito en resonancia se altere.
2.8.3 SENSORES DE FINAL DE CARRERA MECÁNICOS
Estos sensores tienen dos tipos de funcionamiento: NO (normalmente abiertos) y NC (normalmente cerrado). la función de estos elementos o sensores es cortar o abrir paso de la corriente eléctrica ya que estos son utilizados para el control de elementos móviles; cuando este es accionado en su vástago internamente hace el cambio de posición.
Si este se encuentra conectado NO, cuando el vástago es accionado internamente permite el cambio y pasa a ser NC, permitiendo el flujo de corriente.
Si este se encuentra conectado NC, y el vástago es accionado este permite el cambio internamente y pasa hacer un contacto NO el cual corta el flujo de corriente.
Página 20
CAPÍTULO 3 INTEGRACIÓN DEL SISTEMA
Página 21
3.1 TOPOLOGIA TIPO BUS UTILIZADA EN LA RED DEVICENET
Para la integración del sistema para la automatización de las bandas transportadoras, se muestra en la figura 3.1 un diagrama en el cual se pretende representar como son conectados los dispositivos al bus de campo DeviceNet y este a su vez al escáner del PAC, que es el elemento encargado de mantener la comunicación de la red, además la interfaz Ethernet existente entre el PAC y la PC para la programación, puesta en marcha y pruebas del funcionamiento del sistema. Posteriormente en la tabla 3.1 se nombra el dispositivo al cual pertenece cada nodo
Figura 3.1 Integración de la red DeviceNet.
Tabla 3.1 Dispositivos de la red NODO DISPOSITIVO
Nodo 00 Escáner DeviceNet Nodo 01 PowerFlex 40
Nodo 02 Relevador de Sobrecarga
Nodo 03 Sensor final de carrera mecánico Nodo 04 Sensor inductivo
Nodo 05 Sensor Fotoeléctrico 1 Nodo 06 Sensor Fotoeléctrico 2
Nodo 07 Estación de Botones DeviceNet Nodo 08 PowerFlex 4
Página 22
Como se aprecia en la figura 3.1 el nodo 00 es el escáner, que se encuentra instalado como parte del PAC, los nodos del 01 al 08 son los demás elementos de la red, que se encuentran conectados directamente al bus de campo por medio de cables de derivación y conectores que son descritos más adelante. También se observa que en el uso de esta topología es necesario colocar resistencias de terminación (RT) en ambos extremos del troncal de 120 Ohms. El enlace entre la PC y el PAC está dado por medio de un módulo de comunicación Ethernet conectado al PAC junto con el módulo de DeviceNet con su respectiva interfaz.
Los demás elementos mostrados en la figura 3.1 son el CPU del PAC ControlLogix y la fuente de alimentación con que este cuenta, son importantes en la integración de la red de campo, porque en el CPU se efectúan cada una de las operaciones que se programan y la fuente se encarga de alimentar a los distintos módulos para que estos operen de manera correcta y funcione la red.
3.2 DISEÑO DE LA TOPOLOGIA DE RED
Página 23
Figura 3.2 Topología de bus.
3.2.1 LONGITUD MÁXIMA DE LA LÍNEA TRONCAL
Para el cálculo de la longitud máxima de la línea troncal se toma la distancia que hay entre la toma de derivación (3) al último dispositivo (10) porque es mayor que la distancia entre la toma de derivación (3) a la resistencia de terminación (8). Este mismo planteamiento se toma en cuenta para la última toma de derivación del lado derecho al último dispositivo (13). [27]
La longitud de la línea troncal se muestra en la figura 3.2. Conforme a las distancias mostradas en dicha figura, la longitud máxima es igual a la suma de todas las distancias. Queda de la siguiente manera.
Página 24
De acuerdo con el valor obtenido de la longitud máxima de la línea troncal es posible utilizar cualquier valor respecto a la velocidad transmisión específica contenidos en la tabla 3.2
Tabla 3.2 Velocidad de transmisión en relación a la longitud del cable. [27]
Velocidad de transmisión de datos
Longitud máxima (cable plano)
125 kbps 420 m (1.378 pies) 250 kbps 200 m (656 pies) 500 kbps 75 m (246 pies)
La velocidad de transmisión específica seleccionada es de 125 kbps.
3.2.2 LONGITUD ACUMULATIVA DE LA LÍNEA DE DERIVACIÓN
Se refiere a la suma de todas las líneas de derivación, del sistema de cables, respecto a las medidas especificadas en la figura 3.2 se determina la longitud acumulativa de la línea de derivación de la siguiente manera.
Se considera que el recorrido máximo del cable desde cualquier dispositivo en una línea de derivación a la línea troncal es 6 m (20 pies). [27]
Ecuación No. 3
Con base al resultado obtenido de la longitud acumulativa de la línea de derivación es posible determinar si esta dentro del límite en función a la velocidad de transmisión de datos elegida, se referencia a la tabla 3.3 que muestra la longitud acumulativa máxima en función a la velocidad de transmisión,
Tabla 3.3 Longitud acumulativa de la línea de derivación. [27]
Velocidad de transmisión de
datos Longitud acumulativa de la línea de derivación
Página 25
El valor de la longitud acumulativa obtenida esta dentro del la longitud máxima acumulativa mostrada en la tabal anterior, por tanto, la velocidad de transmisión es 125 kbps.
3.2.3 SELECCIÓN DE FUENTE DE ALIMENTACIÓN
Se considera sólo una fuente de alimentación que suministrara la tensión de 24 VCD y corriente necesaria en la parte de comunicación debido a la longitud máxima de la red y a la suma total de la corriente de consumo de todos los dispositivos conectados a la línea troncal, se parte del hecho de que el cable plano del troncal es de clase 1 y soporta una corriente máxima de 8A. [27]
A) CORRIENTE DE ALIMENTACIÓN REQUERIDA
Para efectuar este cálculo se considera la tabla de valores 3.4
Tabla 3.4 valores de corriente de consumo de cada elemento.
No. Dispositivos Dispositivo Corriente de consumo
2 RightSight (sensor fotoeléctrico) 65mA 1 802DN (final de carrera) 60mA 1 Botonera 800E 930mA 1 22B-A5P0N114 (PoweFlex 40) 60mA 1 871tm (sensor inductivo) 60mA 1 193-EC2AB (sobre carga) 60mA 1 1756-DNB/DeviceNet escáner 60mA 1 22 A-B012N104 (PowerFlex 4 DSI) 60mA
Ecuación No. 4
Se considera un 10 % adicional a este total para prever sobretensiones de corriente.
Ecuación No. 5
Página 26
B) INFORMACIÓN SOBRE LAS CAPACIDADES DE ALIMENTACIÓN
Las líneas de derivación, sean gruesas o delgadas, tienen una capacidad nominal máxima de 3 A, dependiendo de la longitud. La corriente máxima disminuye a medida que aumenta la longitud de la línea de derivación, esta relación se aprecia en la tabla 3.5.
Tabla 3.5 Corriente máxima de la línea de derivación. Longitud de línea de derivación Corriente permitida
1.5 m (5 pies) 3 A 2 m (6.6 pies) 2 A 3 m (10 pies) 1.5 A 4.5 m (15 pies) 1 A
6 m (20 pies) 0.75 A
Página 27
Figura 3.3 Alimentación de la señal de potencia.
C) CONEXIÓN DE LA RED A TIERRA
Página 28
La conexión a tierra de la red se conecta desde la fuente de alimentación previamente dimensionada, para ello la parte V- de la fuente de alimentación es conectada a tierra tal como se muestra en la figura 3.4
Figura 3.4 Puesta a tierra de la red.
3.3 CABLES Y CONECTORES UTILIZADOS PARA LA COMUNICACIÓN DE LA RED
En este trabajo de tesis los componentes son conectados mediante dos opciones de cable. En la tabla 3.6 se aprecian los diferentes tipos de cables utilizados.
Tabla 3.6 Cables utilizados en la red. [27]
Cable Para
Plano KwikLink La línea troncal de la red DeviceNet, con dimensiones de 19.3 mm x 5.3 mm
(0.76 pulg. x 0.21 pulg.). Es posible colocar conexiones libremente donde se necesitan.
Cable de derivación KwikLink Este es un cable de derivación de 4 conductores no blindado para uso exclusivo en sistemas KwikLink.
Página 29
Figura 3.5 Cable plano KwikLink
En la tabla 3.7 se muestra la configuración del cable de derivación.
Tabla 3.7 Cable de derivación.
Color de cable Identidad del cable Uso del cable plano
Blanco CAN_H Señal Azul CAN_L Señal Sin forro Tierra N/A
Negro V- Alimentación Rojo V+ Alimentación
3.3.1 POWER TAP
Se utiliza un conector con aislamiento desplazable o (IDC) de clase 1 con cable redondo para interconectar la fuente de alimentación para el cable plano, es mostrado en la figura 3.6
Página 30
3.3.2 TERMINACIONES EN LA RED
En ambos extremos de la línea troncal se tienen resistencias de terminación de 120 Ohms, 1/4 W en cada extremo conectadas directamente a través de los conductores azul y blanco del cable DeviceNet mostrado en la tabla 3.12 la finalidad de las resistencias de terminación es reducir las reflexiones de las señales de comunicación en la red. [27]
Debido a que se utiliza cable plano, la resistencia de 120 Ohms está contenida en una cubierta encajable para el conector base KwikLink. Se muestra en la figura 3.7
Figura 3.7 Resistencias de terminación de cable plano.
3.3.4 CONECTORES CON AISLAMIENTO DESPLAZABLE (IDC) KWIKLINK.
Los conectores con aislamiento desplazable (IDC) KwikLink interconectan cables de derivación y dispositivos a la línea troncal de cable plano, mostradas en la figura 3.8.
Figura 3.8 Conectores con aislamiento desplazable.
3.3.5 CONECTORES.
Página 31
Tabla 3.8 Clasificación de conectores.
Conector Descripción
Sellado Tipo mini: se conecta a tomas y a cable grueso y delgado.
Tipo micro: se conecta únicamente a cable delgado – tiene una capacidad nominal de corriente reducida
Conectores (sólo medio redondo) Mini/Micro instalables en el campo de desconexión rápida (sellado). La figura 3.9 muestra la configuración de los pines de los tipos de conectores.
Figura 3.9 Configuración de conectores.
3.4 DESCRIPCION DE LOS DISPOSITIVOS DEL SISTEMA
3.4.1 ESPECIFICACIONES DEL PAC CONTROLLOGIX 1756 SERIES
En el aula B08 del área de laboratorios pesados 1 de I.C.A de la ESIME unidad Zacatenco se cuenta con un PAC ControlLogix 1756 series para el desarrollo del sistema. El cuál tiene sus respectivos módulos de entradas, salidas, CPU, tarjetas de red, fuente y demás dispositivos, que son señalados a continuación. Para posteriormente describir cada uno de ellos.
Página 32
Tabla 3.9 Características del PAC ControlLogix 1756-L61. [18] ControlLogix 1756-L61
Característica 1756-L61 Memoria de usuario 2 MB
Tarjeta de memoria Compact Flash
Puertos incorporado 1 puerto RS-232 serial Opciones de comunicación EtherNet/IP
DeviceNet Conexiones de controlador 250 serial
Panel
o…60°C
Lenguajes de programación Escalera Estructurado
Diagrama a Bloques
Grafico Funcional Secuencial
Referente a los módulos que se encuentran conectados en el controlador, la tabla 3.10 muestra los módulos de entradas y salidas y la tabla 3.11 muestra los módulos de comunicación así como sus principales características.
Tabla 3.10 Módulos de entradas/salidas del PAC. [18] Módulos de Entradas/Salidas del ControlLogix 1756-L61
Módulo Catalogo No. De Descripción Categoría de Tensión
Rango de V. de Operación Entradas
Digitales 1756-IB16I 16 Entradas aisladas individualmente 12/24 CD sink/source 10…30 VCD
Salidas 1756- 16 Salidas aisladas 12/24 CD 10…30 VCD
Digitales OB16I individualmente sink/source Combinación Entradas/ Salidas Analógicas 1756-IF4FX0F2 F 4 Entradas diferenciales, alta
velocidad, Input: ± 10.5 V. submilisegundos 0-21 mA 2 Salidas de Tensión o
Página 33
Tabla 3.11 Módulos de comunicación del PAC. Módulos de comunicación del ControlLogix 1756-L61
Módulo No. De Catalogo Descripción Velocidad de Com. Con. TCP/IP Con. Lógicas Nodos EtherNet/I
P 1756-ENBT EtherNet/IP Puente, Cobre 10/100 Mbps 64 128 ControlNet 1756-CNB ControlNet Puente, Redundancia 5 Mbps 64 99 DeviceNet 1756-DNB DeviceNet Puente 125 Kbps (500 m) 64 250 kbps (250 m) 500 Kbps (100 m)
Para el presente trabajo de tesis, solo se describen a detalle en este capítulo los elementos necesarios para la integración de la red.
A) CHASIS 1756-A7 B
El ControlLogix es un sistema modular que requiere de un chasis clase 1756-A7, el cual cuenta con lugares para colocar cada módulo en su propia ranura. En su parte posterior está provisto de una pista de comunicación de alta velocidad entre los módulos, así como una distribución de alimentación para cada módulo dentro del mismo. El chasis está diseñado de manera horizontal para ser montado en panel, existen dos tipos de configuración del chasis, estándar o extendida, el chasis del controlador con que contamos, se encuentra en forma estándar. El chasis del controlador permite una comunicación de alta velocidad entre los módulos y una distribución de alimentación para cada módulo dentro del mismo. Sus principales características son mostradas en la tabla 3.12 a continuación. [18]
Tabla 3.12 Características principales del chasis. Tabla de Especificaciones Técnicas ControlLogix
Atributo 1756-A7 Pérdida de potencia máxima 4.5 W.
Ranuras 7
Tamaño del gabinete 50.8 x 60.9 x 20.3 cm. Peso aproximado 1.10 Kg.
Página 34
La figura 3.10 muestra las dimensiones del chasis del ControlLogix, al igual que la correcta distribución y espacio entre cada uno de sus módulos, además de considerar la fuente de alimentación, estos datos resultan sumamente importantes para su considerarlos al momento de su instalación y montaje en panel.
Figura 3.10 Dimensiones del ControlLogix 1756.
El chasis de este ControlLogix suele contar con una fuente de suministro eléctrico de 24 VCD directamente instalada en la parte posterior. Su número de catalogo es el 1756-PA72, la cual debe ser alimentada en un rango de 120/220 VCA.
B) MÓDULO 1756-DNB/C DEVICENET ESCÁNER (NODO 0)
El escáner DeviceNet sirve como interfaz entre los dispositivos conectados a la red y el CPU del controlador. Mediante este módulo es posible conectar de dos formas distintas la red DeviceNet.
Los datos que son generados por los dispositivos conectados en la red, son transferidos al CPU de una manera sencilla, dichos datos pueden ser verificados dentro del software mediante la localización de los respectivos bits designados para este módulo. [20]
El módulo escáner DeviceNet puede ser instalado junto con algunos otros módulos de comunicación como ControlNet, módulos de entradas y salidas y algunos otros conectados al PAC siempre y cuando se respete la capacidad de la fuente de alimentación del chasis y la capacidad de memoria del CPU.
Página 35
Es capaz de transferir hasta 124 palabras dobles de datos de entrada y 123 palabras dobles de datos de salida
A continuación se presentan las características del módulo DeviceNet Scanner, comenzando por su reconocimiento físico, la figura 3.11 muestra sus principales características físicas.
Figura 3.11 Características físicas del módulo DeviceNet [20]
El módulo 1756-DBN soporta las siguientes velocidades de comunicación en red:
125 Kbps
250 Kbps
500 Kbps
Página 36
Tabla 3.13 Datos técnicos del módulo 1756-DNB [20]
Tabla de Especificaciones del módulo DeviceNet Scanner 1756-DNB
Atributo 1756-DNB
Localización en el Módulo Cualquier Ranura en el chasis del ControlLogix Velocidad de Comunicación 125 Kbps - 500 m
Máxima 250 Kbps - 250 m 500 Kbps - 100 m Corriente a 24 VCD 2 mA.
Corriente DeviceNet máx. 11…25 VCD (60 mA. Máx.)
Voltaje de aislamiento 30 V.
C) MÓDULO 1756-ENBT/A RED ETHERNET/IP
Este módulo de comunicación ayuda a configurar el sistema para intercambiar información entre redes y un rango amplio de dispositivos y plataformas. La red Ethernet es un protocolo de red industrial abierto estándar que permite el intercambio de información entre entradas y salidas. [22]
A continuación se presentan las características del módulo Ethernet, comenzando por su reconocimiento físico, la figura 3.12 muestra sus principales características físicas.
Página 37
Figura 3.12 Características físicas del módulo Ethernet [22]
El módulo Ethernet cuenta con una pantalla alfanumérica y LED indicadores para determinar su estado en conexión con la red, la alimentación del chasis, e indica la dirección MAC y dirección IP cuando es asignada apropiadamente. Las principales especificaciones para el funcionamiento de este módulo son mostradas en la tabla 3.14.
Tabla 3.14 Especificaciones del módulo 1756-ENBT [22] Tabla de Especificaciones del módulo Ethernet/IP 1756-ENBT
Atributo 1756-ENBT
Localización en el Módulo Cualquier Ranura en el chasis del ControlLogix Velocidad de Comunicación 10/100 Mbps
Conexiones Lógicas 128 Conexiones TCP/IP 64 Corriente a 24 VCD 3 mA. Voltaje de aislamiento 30 V. Disipación de potencia máx. 3.7 w.
Puerto 1 Ethernet RJ45 Categoría 5
Página 38
D) MÓDULOS DE ENTRADAS/SALIDAS, DIGITALES/ANALÓGICAS
En la tabla 3.2 se hace mención a los diferentes módulos de entradas y salidas con que cuenta el controlador en el cuál se llevará a cabo la implementación de la red de comunicación, a continuación se hace mención a ellos:
Módulo 1756-IB16I/A entradas digitales.
Módulo 1756-OB16I/A salidas digitales.
Módulo 1756-IF4FXOF2F/A entradas-salidas analógicas de alta velocidad.
Controlnet 1756 CNB
La arquitectura del ControlLogix proporciona un amplio rango de módulos de entradas y salidas para diferentes tipos de aplicaciones dentro del control de procesos. Estos permiten la detección y generación de estados de activación y desactivación produciendo información cuando es necesario, a la vez que pueden realizar funciones adicionales del sistema.
La manera en que manejan, procesan y manipulan estos módulos la información se puede consultar con detalle en las bibliografías que se mencionaron anteriormente, su principal función es interconectarse con dispositivos sensores, detectar su estado (activado o desactivado), convertir dichos estados a un nivel lógico apropiado para que lo pueda interpretar el procesador, utilizar dicha información y de acuerdo a la programación actuar sobre los dispositivos de campo tales como actuadores, solenoides, indicadores, alarmas, etc.
Estos diferentes módulos son apropiados para un sin fin de aplicaciones de automatización, en este caso son tomados en cuenta dentro del dimensionamiento para la fuente del controlador y se deben dar de alta por software para la programación de las rutinas del presente trabajo, no tendrán función alguna dentro de la red DeviceNet que aquí se plantea, sin embargo son parte de la red en la parte del alta del PAC.
3.4.2 VARIADOR DE VELOCIDAD DE C.A. DE FRECUENCIA AJUSTABLE POWERFLEX 40 (NODO 1)
Página 39
Tabla 3.15 Variador de frecuencia ajustable. [28] Modelo 22B-A5P0N114
código Significado
22B PowerFlex 40 A 240VCA - 1 fases 5P0 5A-1.0Hp
N Montaje en panel I-P20
1 Teclado integrado
A) BLOQUE DE TERMINALES DE ALIMENTACIÓN ELÉCTRICA.
Para el suministro de alimentación eléctrica el PowerFlex 40 cuenta con bornes de conexión y conexiones al motor, mostrados en la figura 3.13. [28]
Figura 3.13 Bornes de conexión del PowerFlex 40.
En la tabla3.16 Se referencia la función de cada borne de conexión.
Tabla 3.16 Referencia de los bornes de conexión. [28] Terminal Descripción
L1, L2 L3 Entrada Bifásica (L1,L2). Entrada trifásica (L1,L2.L3) T1 Conexiones al Motor T1
T2 Conexiones al Motor T2 T3 Conexiones al Motor T3 DC+, DC– Conexión de bus de CC
BR+, BR– Conexión de resistencia de freno dinámico
Página 40
3.4.3 VARIADOR DE VELOCIDAD DE C.A. DE FRECUENCIA AJUSTABLE POWERFLEX 4 (NODO 8)
Las características del variador de frecuencia ajustable PowerFlex 4 utilizado en este trabajo de tesis son mostradas en la tabla 3.17
Tabla 3.17 Variador de frecuencia ajustable PowerFlex 4. [30] Modelo 22A-B012N104
código Significado
22A PowerFlex 4 B 240VCA - 3 fases 012 12A - 3.0 Hp N Montaje en panel
I-P20
1 Teclado integrado
A) BLOQUE DE TERMINALES DE ALIMENTACIÓN ELÉCTRICA.
Para el suministro de alimentación eléctrica el PowerFlex 4 cuenta con bornes de conexión y conexiones al motor, mostrados en la figura 3.14 [30]
Figura 3.14 Bornes de conexión del PowerFlex 4
La función de cada borne de conexión es la misma que para el PowerFlex 40, por lo tanto están especificados en la tabla 3.15
Página 41
forma de operarlo es mediante comunicación (manera de operación en este trabajo de tesis). [28]
B) TECLADO INTEGRAL DE LOS VARIADORES DE VELOCIDAD POWERFLEX
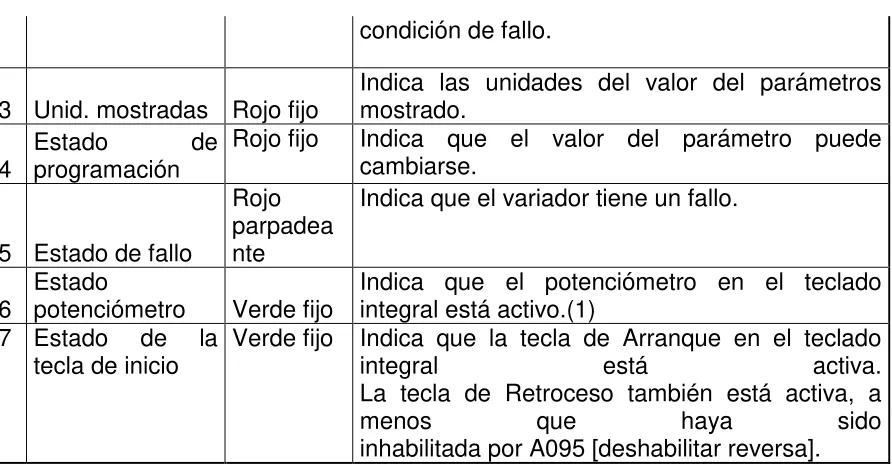
La figura 3.15 y tabla 3.18 ejemplifican las funciones del teclado integral y los menús de programación. Es importante mencionar la pantalla porque en ella se muestran los valores predeterminados desde comunicación así como visualizar algún tipo de fallo. [28]
Figura 3.15 Teclado integral del variador y menús de acceso.
Tabla 3.18 Estado de los LED´s indicadores. [28]
N
o. LED indicador
Estado de LED
indicador Descripción
1
Estado de
marcha/dirección
Rojo fijo Indica que el variador está funcionando y ha emitido la orden de dirección del motor. Rojo
parpadea nte
El variador ha recibido la orden de cambiar de dirección. Indica la dirección actual del motor mientras desacelera hasta cero.
2
Pantalla alfanumérica
Rojo fijo Indica el número de parám., el valor del parám. o el código de fallo. Rojo
parpadea nte

![Tabla 3.27 Especificaciones técnicas del sensor 871tm DeviceNet [34]](https://thumb-us.123doks.com/thumbv2/123dok_es/4977053.76007/56.612.225.381.116.272/tabla-especificaciones-tecnicas-sensor-tm-devicenet.webp)