ESCUELA SUPERIOR DE INGENIER´IA MEC ´
ANICA Y EL´
ECTRICA
INGENIERIA EN COMUNICACIONES Y ELECTR ´ONICA
MODELADO Y AN ´ALISIS ELECTROMAGN´ETICO DE UNA ESTRUCTURA
GUIADA UTILIZANDO EL M´ETODO DE DIFERENCIAS FINITAS
EN EL DOMINIO DEL TIEMPO PARA TELECOMUNICACIONES
DE ALTA VELOCIDAD
Proyecto de Investigaci´on que presentan
Gerardo Allende Alba
Eduardo De los Santos Mendoza
Para Obtener el Grado de
Ingeniero en Comunicaciones y Electr´
onica
Director del Proyecto: Dr. Mauro Alberto Enciso Aguilar.
JUSTIFICACION
El aumento en la demanda de alta velocidad en las telecomunicaciones ha tra´ıdo
como consecuencia un incremento en la tasa de transferencia de datos requerida en
la comunicaci´on entre los dispositivos electr´onicos y por lo tanto de las frecuencias
de operaci´on de los mismos, que alcanzan e incluso sobrepasan aquellas del orden de
las microondas y de las ondas milim´etricas. Este fen´omeno representa un reto
impor-tante para las tecnolog´ıas de fabricaci´on de circuitos, debido a los efectos no deseados
e intr´ınsecos de los materiales empleados en su construcci´on y de las interconexiones
entre los dispositivos electr´onicos a altas frecuencias. En el presente trabajo se analiza
de forma cualitativa una propuesta de sustituci´on a las interconexiones electr´onicas
utilizadas actualmente, basada en una gu´ıa de onda de placas planas paralelas,
me-diante simulaciones y utilizando el m´etodo de diferencias finitas en el dominio del
OBJETIVO
Modelar una estructura guiada de placas paralelas con ´ındice de refracci´on variable
y simular la propagaci´on electromagn´etica en dicha estructura para emplearse en
tarjetas de circuito impreso a frecuencias de operaci´on superiores a 10 GHz.
OBJETIVOS PARTICULARES
Emplear el m´etodo de diferencias finitas en el dominio del tiempo para
dis-cretizar las ecuaciones de Maxwell y obtener la distribuci´on discreta de los
campos el´ectrico y magn´etico en una gu´ıa de onda placas planas paralelas.
Modelar la gu´ıa de onda de placas planas paralelas.
Analizar la propagaci´on electromagn´etica en la gu´ıa de onda de placas planas
paralelas en el modo transversal magn´etico 1.
Implementar en c´odigo computacional el m´etodo de diferencias finitas en el
dominio del tiempo para la estructura guiada propuesta.
Simular la propagaci´on electromagn´etica en la estructura guiada propuesta a
RESUMEN
En este trabajo se describe una aplicaci´on del m´etodo de diferencias finitas
en el dominio del tiempo para simular la propagaci´on electromagn´etica en una
estructura guiada inmersa en sustratos de ´ındices de refracci´on constante y
va-riable. Dicha estructura guiada es modelada tomando como base una gu´ıa de
onda de placas planas paralelas y es propuesta como una tecnolog´ıa alternativa
a las interconexiones electr´onicas en placas de circuito impreso cuya frecuencia
de operaci´on se encuentra por arriba de los 10 GHz. La estrategia del m´etodo
de diferencias finitas se basa en escribir las ecuaciones diferenciales de Maxwell
en una formulaci´on discreta en el espacio y tiempo para trasladar dicha
formu-laci´on a un algoritmo que pueda ser resuelto num´ericamente por medio de un
c´odigo computacional. Adem´as, este trabajo pretende motivar a los estudiantes
hacia la simulaci´on de fen´omenos electromagn´eticos ondulatorios. Por medio de
cualquier lenguaje computacional puede generarse un c´odigo que
posteriormen-te permita obposteriormen-tener animaciones que simulen las diferenposteriormen-tes condiciones de las
Padres
Hermanos
Amigos
Profesores
Instituto Polit´ecnico Nacional. . .
Agradecimientos
Agracedecemos de manera sincera a todas las personas que sin dudar nos
pro-porcionaron su ayuda en todo momento.
Agradecemos a nuestro asesor, Dr. Mauro Alberto Enciso Aguilar por sus valiosos
consejos y su siempre oportuna atenci´on para la realizaci´on de este trabajo,
adem´as de habernos brindado la confianza necesaria para seguir adelante. Al
Ing. Jos´e Ricardo Garc´ıa por su siempre atenta disposici´on para ayudarnos en
la soluci´on de varios problemas relacionados con el presente trabajo, as´ı como al
M. en C. Manuel Alberto Benavides cuyo trabajo estableci´o bases importantes
que hicieron posible la realizaci´on de este trabajo.
Agradecemos a todos los buenos profesores de nuestra escuela que, con una
labor docente excepcional, marcaron nuestras personas y nos proporcionaron
armas para continuar en nuestro camino.
Y, con profunda emoci´on, agradecemos a nuestras familias y amigos cuyo apoyo
incondicional nos ayud´o a mirar siempre hacia adelante a´un ante las vicisitudes
que se presenten.
Gerardo Allende Alba
Cada paso y cada triunfo en la vida han sido siempre gracias a ustedes:
Mar-garita y Artemio, mis m´as grandes soportes y el mejor ejemplo de trabajo. Todo
esto no ser´ıa sin ustedes.
Mi gratitud a mis abuelos, en cuyos senderos mis padres trazaron el suyo y que
han de marcar por siempre el m´ıo.
Gracias a mi luz, mi esperanza y mi fortaleza. El sost´en imbatible en cada uno
de mis d´ıas... Verenice.
Gracias a mis hermanos, mi apoyo incondicional ante todo.
Gracias a mis amigos y a mis buenos profesores, cuya influencia en m´ı me han
convertido en una mejor persona.
Mis gracias a la vida por darme la posibilidad de lograr una de mis metas m´as
importantes. Aqu´ı comienza todo.
Muchas son las personas que han contribuido en mi formaci´on y a quienes
quiero expresar mi gratitud por el apoyo y confianza que me han prestado de
forma desinteresada.
Todo este trabajo nunca hubiera sido posible sin el amparo incondicional de
mis padres: Donato y Felicia, por su ejemplo y constante apoyo. As´ı como mi
hermano Alejandro, gracias por tu comprensi´on y cari˜no. Esto es un logro del
fruto de su ense˜nanza y tambi´en es su premio.
No puedo olvidar a mis compa˜neros y amigos con los cuales he compartido
incontables horas de trabajo. Gracias por los buenos y malos momentos, por
aguantarme y por escucharme.
Gracias a la vida por dejarme vivir y orientar mis pasos hacia el ´exito.
Una gran filosof´ıa no es la que instala la ver-dad definitiva, es la que produce una inquietud.
1.. El m´etodo de diferencias finitas en el dominio del tiempo . . 6
1.1. Introducci´on . . . 6
1.2. Formaci´on de las ecuaciones de diferencia . . . 8
1.2.1. Serie de Taylor . . . 10
1.3. Notaci´on en diferencia finita . . . 12
1.4. Resumen . . . 15
2.. Expresi´on de las ecuaciones de Maxwell mediante el m´etodo DFDT . . . 16
2.1. Ecuaciones de Maxwell en forma diferencial . . . 16
2.1.1. Formulaci´on en tres dimensiones . . . 19
2.2. An´alisis de propagaci´on electromagn´etica en una dimensi´on uti-lizando el m´etodo DFDT . . . 20
2.3. Algoritmo de Yee . . . 25
2.4. Formulaci´on en el espacio libre para tres dimensiones . . . 27
2.5. Determinaci´on del tama˜no de la celda espacial . . . 29
2.6. Estabilidad num´erica . . . 30
2.6.1. Ejemplo del calculo del l´ımite de estabilidad . . . 32
2.6.2. Dispersi´on num´erica . . . 34
2.7. Condiciones de frontera de absorc´ıon . . . 34
2.8. Fuentes num´ericas . . . 37
2.8.1. Funcionalidad de la fuente . . . 38
2.8.2. Fuente dura . . . 39
2.9. Recursos Computacionales . . . 40
2.10. Resumen . . . 40
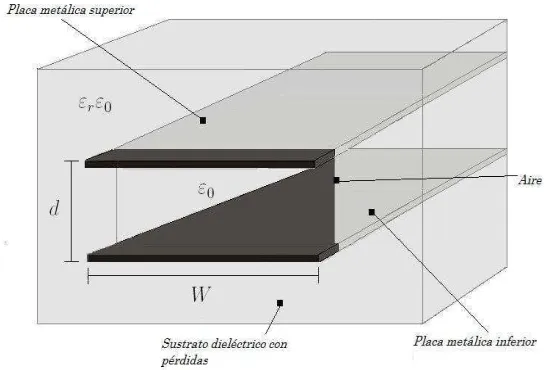
3.. Modelado de una estructura guiada inmersa en diel´ectrico con p´erdidas . . . 42
3.1. Introducci´on . . . 42
3.2. Gu´ıa de onda de placas planas paralelas . . . 44
3.2.1. Modo Transversal Magn´etico (TM) . . . 47
3.2.2. Modo Transversal El´ectrico (TE) . . . 52
3.3. Propagaci´on electromagn´etica en un medio diel´ectrico con p´erdidas 54 3.3.1. Modelado de un medio diel´ectrico con p´erdidas . . . 54
3.3.2. Discretizaci´on del modelo de un medio diel´ectrico con p´erdidas . . . 59
3.4. Caracter´ısticas de una estructura guiada inmersa en material diel´ectrico . . . 61
3.4.1. An´alisis de reflexi´on y transmisi´on de energ´ıa electro-magn´etica . . . 64
3.5. Resumen . . . 68
4.. Simulaci´on mediante el m´etodo DFDT . . . 69
4.1. An´alisis de propagaci´on electromagn´etica en la estructura guiada mediante el m´etodo DFDT . . . 69
4.2. Implementaci´on del m´etodo, experimentaci´on y resultados . . . 73
4.2.1. Experimentaci´on con sustrato diel´ectrico de ´ındice de re-fracci´on constante . . . 74
4.2.2. Experimentaci´on con sustrato diel´ectrico de ´ındice de re-fracci´on variable . . . 79
4.3. An´alisis de resultados . . . 85
4.4. Resumen . . . 86
5.. Conclusiones y trabajos futuros . . . 88
Ap´endice 91
A.. Unidades Gaussianas . . . 92
1.1. Definici´on de una derivada discreta . . . 10
1.2. Cuadr´ıcula basada en nodos de una dimensi´on . . . 13
1.3. Cuadr´ıcula basada en nodos de dos dimensiones . . . 13
1.4. Cuadr´ıcula basada en nodos de tres dimensiones . . . 14
2.1. Escalonamiento de las componentes de campo en la direcci´on z. 21 2.2. Representaci´on de las componentes Ex y Hy en forma discreta espacial. . . 22
2.3. C´alculo deHn+1 y (k+1/2) yExn+1/2(k) a partir de sus vecinos m´as cercanos en espacio y tiempo . . . 24
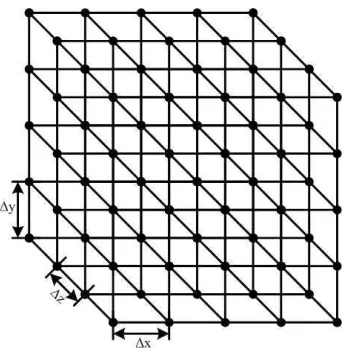
2.4. Posici´on de las componentes vectoriales de campo el´ectrico y magn´etico en una unidad de c´elula c´ubica de una malla espa-cial de Yee de dimensiones ∆x por ∆y por ∆z [4]. . . 26
3.1. Geometr´ıa de una gu´ıa de onda de placas planas paralelas . . . 48
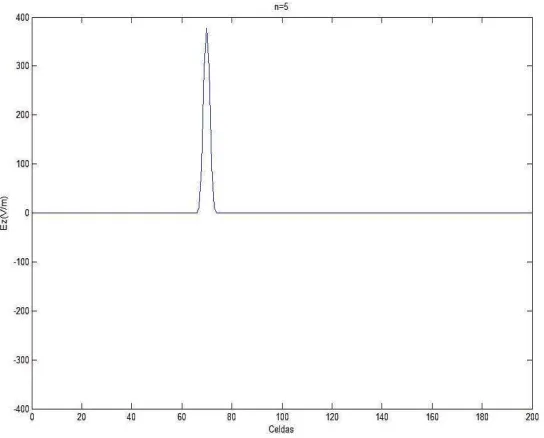
3.2. Esquema de una estructura guiada basada en una gu´ıa de onda de placas planas paralelas inmersa en sustrato diel´ectrico con p´erdidas 62 4.1. Componente Ez vista en 1D en la iteraci´on 5 al comienzo de la propagaci´on. . . 75
4.2. Componente Ez vista en 1D en la iteraci´on 78 al incidir sobre el medio diel´ectrico. . . 76
4.3. Componente Ez vista en 2D con corte en x=43 en la gu´ıa de onda inmersa en Rogers RT/Duroid 5880 en la iteraci´on 1300. N´otese la inexistencia de propagaci´on . . . 77
4.5. Componente Ey vista en 2D con corte en x=66 en la gu´ıa de onda inmersa en Rogers RT/Duroid 5880 en la iteraci´on 1000. . 79
4.6. Componente Ez vista en 3D con corte en x=66 en la gu´ıa de onda inmersa en Rogers RT/Duroid 5880 en la iteraci´on . . . 80
4.7. Variaci´on gradual del ´ındice de refracci´on . . . 81
4.8. Componente Ez vista en 1D a 386 iteraciones. . . 82
4.9. Componente Ez vista en 2D, con corte en x=67 en la gu´ıa de onda inmersa en diel´ectrico de ´ındice de refracci´on variable en la iteraci´on 1000, con f = 11 GHz . . . 83
4.10. Componente Ey vista en 3D con corte en x=52 en la gu´ıa de onda inmersa en diel´ectrico de ´ındice de refracci´on variable en la iteraci´on 1300, con f = 55 GHz . . . 84
4.11. Componente Hx en vista 3D con corte en x=52 en la gu´ıa de onda inmersa en diel´ectrico de ´ındice de refracci´on variable en la iteraci´on 1300, con f = 55 GHz. . . 85
4.12. Componente Ez vista en 2D con corte en x=52 en la gu´ıa de onda inmersa en diel´ectrico de ´ındice de refracci´on variable en la iteraci´on 1300, con f = 55 GHz . . . 86
DOMINIO DEL TIEMPO
1.1. Introducci´on
Cient´ıficos e ingenieros disponen de tres m´etodos para encontrar la descripci´on
de fen´omenos electromagn´eticos. Estos m´etodos se clasifican en: experimental,
an´alitico y n´umerico. El m´etodo experimental consume tiempo, recursos y en
general no permite gran flexibilidad en la variaci´on de par´ametros. El m´etodo
an´alitico da soluci´on a ciertos fen´omenos electromagn´eticos mediante distintas
t´ecnicas, i.e., separaci´on de variable y aplicando condiciones de frontera aunque
desafortunadamente la complejidad del procedimiento se incrementa a la par de
la geometr´ıa que se est´e describiendo. Una alternativa bastante eficiente para
resolver una amplia gama de problemas es a trav´es de los m´etodos n´
umeri-cos. Uno de ´estos es el m´etodo de diferencias finitas en el dominio del tiempo
(DFDT).
En el an´alisis electromagn´etico de la propagaci´on en gu´ıas de onda, las
ecua-ciones de Maxwell proporcionan un m´etodo anal´ıtico para la soluci´on de la
distribuci´on del campo electromagn´etico en dichos medios. El m´etodo DFDT
nos permite resolver num´ericamente las expresiones obtenidas de las ecuaciones
de Maxwell para esta problem´atica. Actualmente este m´etodo es ampliamente
utilizado para la descripci´on del campo electromagn´etico en diversas situaciones
f´ısicas. La posibilidad de poder resolver las ecuaciones anal´ıticas utilizando el
m´etodo de diferencias finitas en el dominio del tiempo nos permite a su vez
soluci´on de problemas de ciertas caracteristicas.
El m´etodo DFDT se emplea comunmente en la soluci´on de problemas
electro-magn´eticos transitorios utilizando diferencias finitas. Este m´etodo fue
desarro-llado por A.Thom [7] en la d´ecada de 1920 con el nombre de el m´etodo de
cuadrados cuyo prop´osito fue resolver ecuaciones no lineales de hidrodin´amica.
Desde entonces se ha empleado para resolver diferentes problemas en distintas
ramas del conocimiento. Por ejemplo, en el estudio de problemas de
compa-tibilidad electromagn´etica y en la verificaci´on del cumplimiento de normas de
exposici´on humana a campos electromagn´eticos en relaci´on con los tel´efonos
m´oviles. Adem´as facilita el an´alisis de materiales con propiedades complejas.
Sin embargo es importante resaltar a pesar de su gran respuesta en campos
cercanos, presenta limitaciones cuando se calculan campos en grandes
domi-nios espaciales. El m´etodo DFDT ofrece varias ventajas como herramienta de
modelado, simulaci´on y an´alisis. Entre sus capacidades se incluyen:
• Interacci´on con objetos de cualquier conductividad.
• Par´ametros dependientes de la frecuencia constituidos para el modelado
de materiales diel´ectricos disipativos, magn´eticos, y ferritas magnetizadas.
Este m´etodo se basa en aproximaciones que permiten sustituir ecuaciones
di-ferenciales por ecuaciones en diferencia finita. Tales expresiones son de forma
algebraica y relacionan la variable dependiente en un limitado n´umero de
pun-tos de la regi´on de soluci´on. Como soluci´on, la ecuaci´on diferencial que describe
el problema, se reemplaza por un n´umero finito de ecuaciones de diferencia, en
relaci´on a los t´erminos de la variable dependiente en puntos seleccionados de
la regi´on de soluci´on. Entonces las inc´ognitas pasan de una distribuci´on
espa-cial continua de la variable dependiente por puntos en la regi´on de soluci´on.
de frontera y/o condiciones iniciales predefinidas. La implementaci´on
computa-cional del m´etodo consume demasiados recursos, lo cual representa un gran
in-conveniente. Si el problema esta dado en geometr´ıas regulares y con una malla
poco densa las ecuaciones recurrentes anteriores son implementadas mediante
algoritmos secuenciales, mientras que si se incurren en geometr´ıas irregulares
o se requiere de una malla muy fina de soluciones es conveniente utilizar
al-goritmos paralelos con el prop´osito de aumentar la capacidad de memoria y
procesamiento y a la vez disminuir el tiempo de ejecuci´on del algoritmo. Dado
el desarrollo de computadores personales, los c´alculos se pueden obtener
me-diante programas de c´omputo ejecutandose en computadoras que soporten un
alto grado de procesamiento.
1.2. Formaci´on de las ecuaciones de diferencia
El m´etodo DFDT es usado para tratar n´umericamente las ecuaciones
diferen-ciales pardiferen-ciales. La soluci´on diferenciable es aproximada por una funci´on de
malla, i.e, por una funci´on que est´a definida por un n´umero finito de puntos
de cuadr´ıcula subyacente en el dominio de la funci´on. Cada derivada presente
en una ecuaci´on diferencial parcial tiene que ser reemplazada por funciones de
diferencia finita al punto de la cuadr´ıcula seleccionado. Tales aproximaciones de
derivadas por f´ormulas de diferencias pueden ser generadas de varias maneras.
Por ejemplo, mediante la expansi´on de series de Taylor o por ecuaciones locales
balanceadas [2].
El m´etodo DFDT sigue los siguientes preceptos:
• El dominio dado por las ecuaciones diferenciales debe contener una
canti-dad suficientemente larga de puntos cuadriculares.
• Todas las derivadas requeridas en los puntos de la cuadr´ıcula ser´an
valores est´an representados por una cuadr´ıcula.
Puede comenzarse a hacer el an´alisis de las expresiones del m´etodo DFDT,
mediante la definici´on com´un de la derivada de primer orden de la funci´onf(x)
en una dimensi´on con respecto a x que es:
df(x)
dx = l´ım∆x→0
f(x)−f(x−∆x)
∆x (1.1)
df(x)
dx = l´ım∆x→0
f(x+ ∆x)−f(x)
∆x (1.2)
df(x)
dx = l´ım∆x→0
f(x+ ∆x)−f(x−∆x)
2∆x (1.3)
Estas expresiones son matem´aticamente equivalentes. La aproximaci´on converge
a la derivada cuando el l´ımite ∆x →0. Ahora el problema se resume a
deter-minar ∆x en su forma finita en lugar de poseer un tama˜no infinitesimal.
Por lo tanto, las ecuaciones (1.4)-(1.6) muestran los operadores utilizados en
diferencias finitas.
df(x)
dx ≈
f(x)−f(x−∆x)
∆x (1.4)
df(x)
dx ≈
f(x+ ∆x)−f(x)
∆x (1.5)
df(x)
dx ≈
f(x+ ∆x)−f(x−∆x)
La ecuaci´on (1.4) es el operador de diferencias finitas hacia atr´as. La ecuaci´on
(1.5) es el operador de diferencias finitas hacia adelante y la ecuaci´on (1.6) es
el operador de diferencias finitas central.
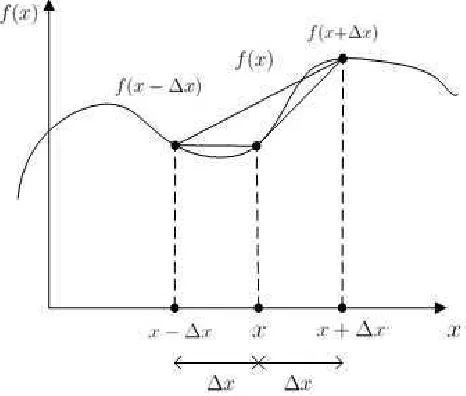
1.2.1. Serie de Taylor
La ´ıdea clave es expresar una funci´onf(x) en una distancia finita ∆x:f(x+∆x)
[image:20.595.197.430.236.434.2]mediante expansiones de la serie de Taylor, ve´ase figura 1.1.
Fig. 1.1: Definici´on de una derivada discreta
Dicha expansi´on puede escribirse como
f(x±∆x) =
∞ X
n=0 1
n!(±∆x)
ndnf(x)
dxn , (1.7)
Si se toma un desplazamiento positivo x+ ∆x en la ecuaci´on 1.7 y se expresa
en forma desarrollada, queda como
f(x+∆x) = f(x)+∆xdf(x)
dx +
(∆x)2 2!
d2f(x)
dx2 +
(∆x)3 3!
d3f(x)
dx3 +
(∆x)4 4!
d4f(x)
Para poder obtener una expresi´on en t´erminos de un operador de diferencias,
espec´ıficamente el operador de diferencias finitas hacia adelante, a la ecuaci´on
(1.8) se le resta f(x) y posteriormente se divide entre ∆x. Por lo tanto, dicha
ecuaci´on queda como
f(x+ ∆x)−f(x)
∆x =
df(x)
dx +
(∆x) 2!
d2f(x)
dx2 +
(∆x)2 3!
d3f(x)
dx3 +
(∆x)3 4!
d4f(x)
dx4 +O[(∆x) 4] (1.9)
De (1.9) se despeja el t´ermino df(x)/dx, quedando como
df(x)
dx =
f(x+ ∆x)−f(x)
∆x −
(∆x) 2!
d2f(x)
dx2 −
(∆x)2 3!
d3f(x)
dx3 −
(∆x)3 4!
d4f(x)
dx4 −O[(∆x) 4] (1.10)
de donde puede obtenerse
O[(∆x)] = −(∆x) 2!
d2f(x)
dx2 −
(∆x)2 3!
d3f(x)
dx3 −
(∆x)3 4!
d4f(x)
dx4 −O[(∆x)
4] (1.11)
que a su vez permite obtener
O[(∆x)2] =−(∆x) 2!
d2f(x)
dx2 −O[(∆x)
2] (1.12)
Se denota que O[(∆x)2] y O[(∆x)] son errores al momento de trucar la serie de expansi´on de Taylor. La exactitud de la aproximaci´on de diferencia finita
depende del ´ultimo t´ermino. El error de la diferencia hacia adelante y hacia
es de segundo orden, o sea O[(∆x)2]. Por lo tanto la definici´on completa de derivada en diferencia finita es la siguiente:
df(x)
dx =
f(x+ ∆x)−f(x)
∆x +O[(∆x)] (1.13)
Finalmente, se expresan los operadores de diferencia finita con un error de
trun-camiento en la serie de expansi´on de Taylor, quedando como
df(x)
dx =
f(x)−f(x−∆x)
∆x +O[(∆x)]≈
f(x)−f(x−∆x)
∆x (1.14)
df(x)
dx =
f(x+ ∆x)−f(x)
∆x +O[(∆x)]≈
f(x+ ∆x)−f(x)
∆x (1.15)
df(x)
dx =
f(x+ ∆x)−f(x−∆x)
2∆x +O[(∆x)
2]
≈ f(x+ ∆x)2∆−xf(x−∆x)
(1.16)
Una vez expresadas las derivadas de una funci´onf(x) en t´erminos de operadores
de diferencia finita, es importante especificar una notaci´on que permita expresar
de forma clara cualquier discretizaci´on sobre sistemas de ecuaciones diferenciales
que se realice.
1.3. Notaci´on en diferencia finita
Los sistemas de cuadr´ıcula empleados en DF dependen de la dimensi´on del nodo
utilizado, es decir, una dimensi´on (figura 1.2), dos dimensiones (figura 1.3) y tres
dimensiones (figura 1.4). Cada uno de los nodos tiene asignada una cantidad
Fig. 1.2: Cuadr´ıcula basada en nodos de una dimensi´on
Fig. 1.3: Cuadr´ıcula basada en nodos de dos dimensiones
Para lograr una notaci´on en t´erminos de dichas cuadr´ıculas de nodos, se plantea
un punto espacial en una malla rectangular de tres dimensiones uniforme, como
en la figura 1.4, donde:
(i, j, k) = (i∆x, j∆y, k∆z). (1.17)
Aqu´ı, ∆x, ∆yy ∆z son respectivamente, los incrementos espaciales en las
direc-ciones de coordenadasx,y y z, e i,j y k son enteros. Puede denotarse cualquier
funci´onu del espacio y tiempo evaluadas en un punto discreto de la cuadricula
y en un punto discreto de tiempo como
u(i∆x, j∆y, k∆z, n∆t) =un(i, j, k) (1.18)
Fig. 1.4: Cuadr´ıcula basada en nodos de tres dimensiones
uniforme, yn un entero.
Se puede obtener una expresi´on para la primera derivada parcial espacial de u
en la direcci´on x, evaluada a un tiempo fijo tn =n∆t denotada como
∂u
∂x(i∆x, j∆y, k∆z, n∆t) =
un(i+ 1/2, j, k)−un(i−1/2, j, k)
∆x +O[(∆x)
2] (1.19)
Se aprecia que un incremento de ±1/2 en el sub´ındice i (coordenada x) de
u, denota un espacio de diferencia finita sobre ±1/2∆x. Como complemento,
debe a˜nadirse una aproximaci´on n´umerica semejante a (1.19) para ∂u/∂y y
∂u/∂z que puedan ser escritas con el incremento de los sub´ındices j o k de u
por ±1/2∆y o ±1/2∆z, respectivamente. De forma similar, la expresi´on para
la primera derivada parcial temporal de u, evaluada en un punto espacial fijo
(i, j, k) se denota como
∂u
∂t(i∆x, j∆y, k∆z, n∆t) =
un+1/2(i, j, k)−un−1/2
(i, j, k)
∆t +O[(∆t)
N´otese que el±1/2 incremento en el super´ındice n (coordenada de tiempo) de
u, denota un tiempo de diferencia finita sobre ±1/2∆t.
1.4. Resumen
Las ecuaciones diferenciales parciales forman la base de varios modelos matem´aticos
que describen el comportameinto de fen´onemos f´ısicos, qu´ımicos y biol´ogicos y
m´as recientemente su aplicaci´on se extiende al campo econ´omico, financiero, y
metereol´ogico. Obtener las predicciones de los sistemas formados por las
ecua-ciones diferenciales parciales se realiza mediante aproximaecua-ciones n´umericas. La
estrategia del m´etodo radica en expresar las ecuaciones diferenciales parciales en
forma discreta a tr´aves de diferencias finitas. Posteriormente se puede crear un
algoritmo en base a la formulaci´on hecha y luego encontrar la soluci´on n´umerica
del problema descrito por medio de ecuaciones diferenciales parciales. Existen
tres m´etodos cl´asicos para hayar la soluci´on n´umerica de dichas ecuaciones.
Estos son el m´etodo de diferencias finitas, el m´etodo del elemento finito, y el
m´etodo del volumen finito. El m´etodo de diferencias finitas fue elegido por su
f´acil implementaci´on, entendimiento y flexibilidad. El concepto de los
funda-mentos presentados para tratar de forma discreta las ecuaciones diferenciales
parciales son aplicables a las ecuaciones de Mawell y abordar el problema de la
MAXWELL MEDIANTE EL M ´
ETODO DFDT
En el presente cap´ıtulo se desarrollan las ecuaciones de Maxwell en su forma
diferencial mediante el m´etodo DFDT as´ı como el uso del algoritmo de Yee cuyo
sost´en son las aproximaciones de diferencia finita de las derivadas espaciales y
temporales de las ecuaciones diferenciales de Maxwell. Adem´as, se cubren los
as-pectos de normalizaci´on de las ecuaciones en diferencia finita, dimensionamiento
de los escalones espaciales y temporales, para lo cual es necesario cumplir con
las condiciones de estabilidad de Courant [5],[9] en las ecuaciones discretizadas.
Tambi´en se da una introducci´on a los diferentes tipos de fuentes de excitaci´on
de ondas electromagn´eticas apropiados para el modelado de problemas de
inge-nier´ıa. Por ´ultimo se analizan las condiciones de frontera de absorci´on utilizado
para simular la propagaci´on de las ondas electromagn´eticas m´as all´a del ´area
de c´alculo.
2.1. Ecuaciones de Maxwell en forma diferencial
El comportamiento de los campos electromagn´eticos debe satisfacer las
ecua-ciones de Maxwell.Por ello, la importancia de estas ecuaecua-ciones radica en que
resumen todas las leyes electromagn´eticas conocidas hasta la fecha [26]. Antes
de proceder a desarrollar las ecuaciones de Maxwell mediante el m´etodo DFDT
en tres dimensiones, primero se har´a un an´alisis introductorio en una dimensi´on.
Se considera una regi´on del espacio, libre de fuentes donde existan materiales
pierde potencia debido a una mala conducci´on, fen´omeno que trae como
conse-cuencia calor disipado. Por ello se establece una densidad de corriente magn´etica
equivalente J~M para justificar el mecanismo de p´erdida magn´etica:
~
JM =σ
∗~
H (2.1)
y una densidad de corriente el´ectrica equivalenteJ~E para dar raz´on al
mecanis-mo de p´erdida el´ectrica:
~
JE =σ ~E (2.2)
En las ecuaciones (2.1) y (2.2), σ∗
es la resistividad magn´etica y σ es la
con-ductividad el´ectrica.
Las ecuaciones de Maxwell pueden expresarse tanto es su forma diferencial como
integral. La forma integral de las ecuaciones de Maxwell requiere definir
clara-mente la superficie de an´alisis, mientras la forma diferencial es la de uso com´un
en la resoluci´on de problemas, adem´as el m´etodo DFDT requiere ecuaciones
expresadas en forma diferencial. Por consiguiente, se escriben las ecuaciones de
Maxwell en su forma diferencial utilizando las unidades del sistema internacional
Ley de Faraday
∂ ~B
∂t =−∇ ×E −~ J~M (2.3)
Ley Amp`ere (corregida por Maxwell)
∂ ~D
∂t =∇ ×H −~ J~E (2.4)
Ley de Gauss para campos magn´eticos
Ley de Gauss
∇ ·D~ =ρv (2.6)
En un medio lineal, isotr´opico y homogeneo, las siguientes relaciones
constitu-tivas se mantienen entre las intensidades de campo el´ectrico y magn´etico y las
densidades de flujo:
~
B=µ ~H (2.7)
~
D=ε~E (2.8)
donde se establece adem´as:
ε: permitividad el´ectrica [F/m]
εr : permitividad relativa (adimensional)
ε0 : permitividad en el espacio libre (8,854×10−12) [F/m]
µ: permeabilidad magn´etica [H/m]
µr : permeabilidad relativa (adimensional)
µ0 : permeabilidad en el espacio libre (4π×10−7) [H/m]
Empleando las relaciones anteriores en las ecuaciones de Maxwell, se obtiene
∂ ~H
∂t =−
1
µ∇ ×E −~
1
µJ~M (2.9)
∂ ~E
∂t =
1
ε∇ ×H −~
1
εJ~E (2.10)
funciones reales de las coordenadas espaciales x, y, z, y variable en el tiempo t.
Estas cantidades est´an definidas como:
~
E es la intensidad de campo el´ectrico [V/m].
~
H es la intensidad de campo magn´etico [A/m].
~
D es la densidad de flujo el´ectrico [C/m2].
~
B es la densidad de flujo magn´etico [Wb/m2].
~
JM es la densidad de corriente magn´etica ficticia [V/m2].
~
JE es la densidad de corriente el´ectrica [A/m2].
ρv es la densidad de carga el´ectrica [C/m3].
2.1.1. Formulaci´on en tres dimensiones
Para continuar con el an´alisis, es importante que se escriban las componentes
vectoriales de los operadores diferenciales expresados en las ecuaciones (2.9) y
(2.10). En coordenadas cartesianas, el sistema de ecuaciones escalares queda
como ∂Hx ∂t = 1 µ( ∂Ey ∂z − ∂Ez
∂y −JM x) (2.11)
∂Hy ∂t = 1 µ( ∂Ez ∂x − ∂Ex
∂z −JM y) (2.12)
∂Hz ∂t = 1 µ( ∂Ex ∂y − ∂Ey
∂x −JM z) (2.13)
∂Ex ∂t = 1 µ( ∂Hz ∂y − ∂Hy
∂Ey
∂t =
1
µ( ∂Hx
∂z −
∂Hz
∂x −JEy) (2.15)
∂Ez
∂t =
1
µ( ∂Hy
∂x −
∂Hx
∂y −JEz) (2.16)
El enrejado del espacio de DFDT debe ser estructurado de tal forma que la
relaci´on de la ley de Gauss este impl´ıcita en las posiciones de los camposE~ yH~
en el enrejado, y en las operaciones derivadas del espacio n´umerico sobre estas
componentes que modelen el efecto del operador diferencial.
2.2. An´alisis de propagaci´on electromagn´etica en una dimensi´on
utilizando el m´etodo DFDT
Antes de abordar la formulaci´on en tres dimensiones del m´etodo DFDT, se
parte de la formulaci´on en una dimensi´on donde se tendr´a un conjunto de dos
ecuaciones en t´erminos deHy y Ex. Haciendo uso de las ecuaciones de Maxwell en el espacio libre se obtiene
∂Hy
∂t =−
1
µ0
∂Ex
∂z (2.17)
∂Ex
∂t =−
1
ε0
∂Hy
∂z (2.18)
Estas ecuaciones son de una onda plana con el campo el´ectrico orientado en la
direcci´on x, el campo magn´etico orientado en la direcci´on y, y viajando en la
direcci´on z.
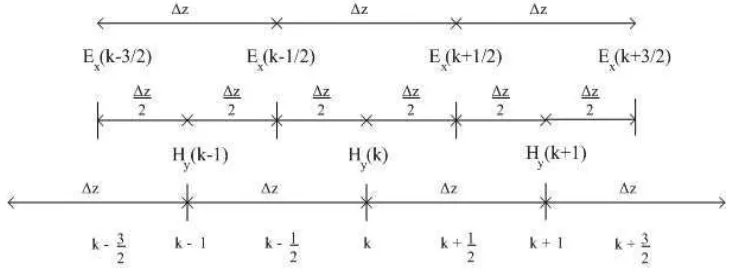
Para comenzar el proceso de discretizaci´on se toma la aproximaci´on de la
un escal´on de ∆x= ∆z/2 y de acuerdo con lo establecido por (1.14)-(1.16), se
tiene
Hy :z → ±k∆z, k = 1, . . . , Kz
Ex:z → ±(k+ 1/2)∆z, k = 1, . . . , Kz
La discretizaci´on espacial aplica para cualquiera de los ejes coordenados.
Dis-cretizando el primer t´ermino se tiene
∂Ex
∂z →
∂Ex
∂z |z =
1 ∆z
·
Ex(z+ ∆z/2)−Ex(z−∆z/2) +O[(∆z)2]
¸
(2.19)
El ´ındice dentro del par´entesis representa la variaci´on en el espacio coordenado
[image:31.595.230.387.430.522.2]z de la onda.
Fig. 2.1: Escalonamiento de las componentes de campo en la direcci´onz.
Como resultado del uso de las diferenicas finitas en la discretizaci´on de los
t´erminos temporales, la ecuaci´on (2.17) puede escribirse como
∂Ht y(k)
∂t =−
1
µ0∆z
Fig. 2.2:Representaci´on de las componentes Ex yHy en forma discreta espacial.
Dicho desarrollo puede verse de forma m´as clara en la figura 2.2. Siguiendo el
mismo procedimiento se discretiza espacialmente la segunda ecuaci´on,
resultan-do en
∂Et
x(k+ 1/2)
∂t =−
1
ε0∆z
[Hyt(k+ 1)−Hyt(k)] (2.21)
Ahora, se debe determinar la forma de diferencia finita de las derivdas parciales
en tiempo de las ecuaciones (2.20) y (2.21). De 1.16 se procede a desarollar
las ecuaciones diferenciales parciales en tiempo en su forma discreta con un
∆ = ∆t/2
∂Ht y(k)
∂t =
Hn
y(k)−Hn
−1
y (k)
∆t +O[(∆t)
2] (2.22)
∂Et
x(k+ 1/2)
∂t =
En+1/2
x (k+ 1/2)−En
−1/2
x (k+ 1/2)
∆t +O[(∆t)
2] (2.23)
Finalmente se obtiene el conjunto de ecuaciones en su forma de diferencia finita,
Hn
y(k)−Hn
−1
y (k)
∆t =−
1
µ0∆z
[Ext(k+ 1/2)−Ext(k−1/2)] (2.24)
En+12
x (k+ 12)−En
−1
2
x (k+12)
∆t =−
1
ε0∆z
[Hyt(k+ 1)−Hyt(k)] (2.25)
Las ecuaciones (2.24) y (2.25) pueden ser reformuladas por un algoritmo
itera-tivo:
Exn+1/2(k) =En−1/2
x (k)− ∆t ε0·∆x
[Hyn(k+ 1/2)−Hyn(k−1/2)] (2.26)
Hyn+1(k+ 1/2) =Hyn(k+ 1/2)− ∆t
µ0·∆x
[Exn+1/2(k+ 1)−En−1/2
x (k)] (2.27)
Obs´ervese que los c´alculos est´an intercalados tanto en espacio y tiempo, es decir,
en las ecuaciones (2.26) y (2.27), el nuevo valor del campoEx se calcula a partir del valor anterior deEx y el valor presente de Hy como lo sugiere la figura 2.3. Este es el principal paradigma del m´etodo DFDT [4].
Las ecuaciones (2.26) y (2.27) son muy similares, pero debido a que ε0 y µ0 difieren por varios ordenes de magnitud, Ex y Hy, sus magnitudes tambi´en diferiran por mucho. Para ello se necesita hacer un cambio de variables [9], es
decir e E = s ε0 µ0 ~ E (2.28)
Por lo tanto, las ecuaciones de Maxwell se normalizan por la sustituci´on de
Fig. 2.3:C´alculo de Hyn+1(k+ 1/2) y Exn+1/2(k) a partir de sus vecinos m´as cercanos en
espacio y tiempo
frecuentemente usadas por f´ısicos (v´ease ap´endice A). El motivo de emplear esta
relaci´on es, adem´as, para simplificar las expresiones (2.26) y (2.27). Entonces
sustituyendo en las ecuaciones (2.26) y (2.27) se tiene
e
Exn+1/2(k) =Een−1/2
x (k)− 1
√ε
0µ0 ∆t
∆x[H
n
y(k+ 1/2)−Hyn(k−1/2)] (2.29)
Hyn+1(k+ 1/2) =Hyn(k+ 1/2)− √1
ε0µ0 ∆t
∆x[Ee
n+1/2
x (k+ 1)−Een
−1/2
x (k)] (2.30)
En las siguientes secciones se realiza una generalizaci´on sobre la discretizaci´on
de las ecuaciones de Maxwell en tres dimensiones a trav´es del llamadoalgoritmo
2.3. Algoritmo de Yee
En 1966, Kane Yee propuso un conjunto de ecuaciones de diferencia finita para el
sistema de ecuaciones (2.9)-(2.10) para el caso de materiales sin p´erdidaσ∗
= 0
y σ= 0 [4].
El algoritmo de Yee es de gran ´utilidad y provee varias ventajas debido a que
su base fundamental es muy robusta. Algunas de estas ventajas son:
1. El algoritmo de Yee resuelve para ambos campos el´ectrico y magn´etico en
tiempo y espacio el par de ecuaciones diferenciales de Maxwell a diferencia
de resolver el campo el´ectrico solamente (o el campo magn´etico solamente).
• Usando la informaci´on de ambos camposE~yH~, la soluci´on es m´as
ro-busta que usando solo uno. Las propiedades el´ectricas y magn´eticas de
los materiales pueden ser modelados de manera directa. Esto es
espe-cialmente importante cuando se modela la atenuaci´on de una secci´on
trasnversal de un radar.
2. El algoritmo de Yee centra sus componentes E y H en un espacio
tridi-mensional, cada componente E est´a rodeado por cuatro componentes
cir-culantes H, y cada componente H est´a rodeado por cuatro componentes
circulantes E como se sugiere en la figura 2.4. El arreglo espacial en la
figura 2.4 no es arbitrario puesto que ´este debe ser consistente con la ley
de Faraday y Amp`ere [9].
Adem´as, se tienen los siguientes atributos de la malla espacial de Yee:
• Las expresiones en diferencia finita para las derivadas espaciales
repre-sentadas por los operadores diferenciales son diferencias centrales por
naturaleza y de segundo orden.
• En la resoluci´on del problema, simplemente se especif´ıca la
Fig. 2.4:Posici´on de las componentes vectoriales de campo el´ectrico y magn´etico en una unidad de c´elula c´ubica de una malla espacial de Yee de dimensiones ∆x por ∆y
por ∆z [4].
permite tener una aproximaci´on de la superficie y geometr´ıa interna
de la estructura a modelar, con un espacio de resoluci´on establecida
por el tama˜no de celda.
• La malla de Yee est´a libre de divergencias con respecto a sus campos
~
E y H~ en la ausencia de cargas el´ectricas y magn´eticas.
3. El algoritmo de Yee tambi´en centra sus componentes E y H en tiempo
de acuerdo a los t´erminos de salto. Todos los c´alculos de E~ del espacio
modelado son completamente modelados y almacenados en la memoria en
un punto de tiempo particular empleando los datos de H~ previamente
al-macenados. Entonces todos los c´alculos H~ en el espacio son completados y
almacenados en la memoria usando los datos de E~ previamente
computa-dos. El ciclo comienza con el rec´alculo de las componentes de E~ basadas
en el nuevo arreglo H~. Este proceso continua hasta que es concluido las
iteraciones en tiempo.
• Las iteraciones de tiempo en el algoritmo no son disipativas. Esto es,
atenuan falsamente debido al artefacto de escalamiento en tiempo no
f´ısico del algoritmo.
• Los saltos en el escalamiento en tiempo son completamente explicitos,
por ello se evitan los problemas envueltos con ecuaciones simultaneas.
2.4. Formulaci´on en el espacio libre para tres dimensiones
Desarrollar el algoritmo en tres dimensiones llega a ser m´as complicado porque
su implementaci´on necesita un mayor n´umero de recursos computacionales el
cual precise el problema porque se manejaran todos los vectores de campo y
cada una de ellos en tres dimensiones.
Los camposE~y H~ estar´an dispuestos alrededor de intervalos de una celda cuyo
origen es el punto (i, j, k), ver figura 2.4. Cada campoE se localiza 1/2 ancho
de celda del origen en la direcci´on de su orientaci´on, mientras que cada campo
~
H se desplaza 1/2 de ancho en cada direcci´on excepto el de su orientaci´on.
Por lo tanto pueden ser constru´ıdas las Ecuaciones de Maxwell en tres
dimen-siones en diferencias finitas, quedan como
Exn+1/2(i+ 1/2, j, k) =En−1/2
x (i+ 1/2, j, k)+ ∆t
∆x·√ε0µ0
[Hzn(i+ 1/2, j+ 1/2, k)−Hzn(i+ 1/2, j−1/2, k)−
Hyn(i+ 1/2, j, k+ 1/2) +Hyn(i+ 1/2, j, k−1/2)] (2.31)
Hxn+1(i, j+ 1/2, k+ 1/2) =Hxn(i, j+ 1/2, k+ 1/2)− ∆t
∆x·√ε0µ0
[Eyn+1/2(i, j+ 1/2, k+ 1)−Eyn+1/2(i, j+ 1/2, k)−
Eyn+1/2(i, j+ 1/2, k) =En−1/2
y (i, j+ 1/2, k)+ ∆t
∆x·√ε0µ0
[Hxn(i, j+ 1/2, k+ 1/2)−Hxn(i, j+ 1/2, k−1/2)−
Hzn(i+ 1/2, j+ 1/2, k) +Hzn(i−1/2, j+ 1/2, k)] (2.33)
Hyn+1(i+ 1/2, j, k+ 1/2) =Hyn(i+ 1/2, j, k+ 1/2)− ∆t
∆x·√ε0µ0
[Ezn+1/2(i+ 1, j, k+ 1/2)−Ezn+1/2(i, j, k+ 1/2)−
Exn+1/2(i+ 1/2, j, k+ 1) +Exn+1/2(i+ 1/2, j, k)] (2.34)
Ezn+1/2(i, j, k+ 1/2) =En−1/2
z (i, j, k+ 1/2)+ ∆t
∆x·√ε0µ0 [Hn
y(i+ 1/2, j, k+ 1/2)−Hyn(i−1/2, j, k+ 1/2)−
Hxn(i, j+ 1/2, k+ 1/2) +Hxn(i, j−1/2, k+ 1/2)] (2.35)
Hzn+1(i+ 1/2, j+ 1/2, k) = Hzn(i+ 1/2, j+ 1/2, k)− ∆t
∆x·√ε0µ0
[Exn+1/2(i+ 1/2, j+ 1, k)−Exn+1/2(i+ 1/2, j, k)−
Eyn+1/2(i+ 1, j+ 1/2, k) +Eyn+1/2(i, j+ 1/2, k)] (2.36)
Dichas ecuaciones pueden ser implementadas en un algoritmo computacional.
Sin embargo, es importante a´un tomar en cuenta otras consideraciones
con-secuencia de la discretizaci´on de las ecuaciones de Maxwell. En las siguientes
2.5. Determinaci´on del tama˜
no de la celda espacial
Antes de implementar las ecuaciones en diferencia finita es necesario determinar
el tama˜no de la celda, posteriormente se determinar´a el incremento de tiempo
con el que se logra la estabilidad num´erica. La selecci´on del tama˜no de la
cel-da usacel-da en el m´etodo DFDT depende del n´umero de muestras que deben ser
tomados para asegurar una buena representaci´on, este n´umero de puntos
de-pende de muchos factores [5],[9]. Entonces, el tama˜no de la cuadr´ıcula debe
ser una fracci´on de la longitud de onda de la mayor frecuencia contenida en el
espectro de frecuencias de excitaci´on para conseguir resultados significativos.
El teorema de muestreo de Nyquist menciona que se necesita una frecuencia
de muestreo igual o mayor al doble de la frecuencia mayor del espectro que se
utiliza, por ello se sugiere que el tama˜no de la celda ser´a menor que λu/2 para conseguir una variaci´on espacial de los campos. Dependiendo de la precisi´on de
los resultados deseados, se ha encontrado que el tama˜no de la celda debe ser
deλu/10 o si los recursos computacionales lo permiten de λu/20. Dependiendo de la geometr´ıa se dicta que tan peque˜no debe ser el tama˜no de la celda, por
ejemplo una celda de tama˜no λ/99 fue requerida para modelar cierto detalles
geometricos de una antena Vivaldi [24]. En general tendremos que centrarnos
en la frecuencia mayor que simularemos. Si solamente simulamos en el espacio
libre podremos escoger la siguiente relaci´on
∆x= λ0
10 = 7,5cm (2.37)
Aunque si se realiza una simulaci´on en un medio cuya constante diel´ectrica
relativa sea diferente de 1, tendremos que hayar la longitud de onda en el medio
corta. Entonces, se utilizara la siguiente f´ormula para obtener dicha longitud de
onda
λm =
c/√εr
f (2.38)
Adem´as del tama˜no de celda espacial, es importante hacer consideraciones sobre
la estabilidad num´erica del m´etodo, analizando el tama˜no adecuado de la celda
temporal.
2.6. Estabilidad num´erica
La selecci´on del incremento espacial ∆x y temporal ∆t pueden afectar la
ve-locidad de propagaci´on de las ondas num´ericas en una malla modelada por
diferencias finitas, por ello existe un error num´erico.
Primero considerese el caso de una dimensi´on. En un escal´on de tiempo, cualquier
punto de la onda no debe recorrer m´as que una celda porque durante un
es-cal´on de tiempo el algoritmo DFDT puede propagar la onda de una celda a su
m´as cercano vecino. Cualquier intento de usar un tiempo ligeramente mayor al
escal´on de tiempo provocara r´apidamente inestabilidad num´erica. Se tiene que
la condici´on para el caso de una dimensi´on es
∆t≤ ∆x
c (2.39)
Si empleamos el signo de igualdad, entonces nos estaremos refiriendo alescal´on
de tiempo m´agico de Taflove [9], es decirc∆t = ∆x.
Para iniciar el an´alisis de estabilidad num´erica se emplea una onda viajera
discretamente a (xI, yJ, zK, tn). Un vector de campo puede ser escrito como:
~
V|nI,J,K =V~0ej[(wereal+jweimag)n∆t
−ekxI∆x−ekyJ∆y−ekzK∆z]
(2.40)
~
V|nI,J,K =V~0e
−weimagn∆t
ej(werealn∆t−ekxI∆x−ekyJ∆y−ekzK∆z)
(2.41)
Aqu´ıke es el n´umero de la onda viajera num´erica sinusoidal. Se nota que se tiene
tres opciones (2.40): una amplitud de onda consante con tiempo (weimag = 0), una amplitud exponencial decreciente con tiempo (weimag >0), o una amplitud exponencial ceciente con tiempo (weimag <0). Con base en lo anterior, se procede a analizar la dispersi´on num´erica permitida para una frecuencia angular de valor
complejo:
[ 1 ∆tsen(
e
w∆t
2 )] 2
= [ 1 ∆xsen(
e
kx∆x 2 )]
2 + [ 1
∆ysen(
e
ky∆y 2 )]
2 + [ 1
∆zsen(
e
kz∆z 2 )]
2 (2.42)
Primero se resuelve (2.42) para we. Esto resulta en
e
w= 2
∆tsen
−1
(ξ) (2.43)
donde
ξ=c∆t
v u u t 1
(∆x)2sen2(
e
kx∆x 2 ) +
1
(∆y)2sen2(
e
ky∆y 2 ) +
1
(∆z)2sen2(
e
kz∆z
Se observa de (2.44) que
0≤ξ ≤c∆t
s
1 (∆x)2) +
1 (∆y)2) +
1
(∆z)2) ≡ξlsuperior (2.45)
El par´ametro ξlsuperior es obtenido cuando cada t´erminosen2(ek∆x2 ) dentro de la ra´ız, simult´aneamente alcanzan el valor de 1. Esto ocurre para la propagaci´on
num´erica teniendo como componentes vectoriales de onda.
e
kx =±
π
∆x; key =± π
∆y; kez =± π
∆z; (2.46)
Es claro queξlsuperior puede exceder 1 dependiendo de la selecci´on de ∆t. Esto puede resultar en valores complejos de sen−1
(ξ) en (2.43), por lo tanto valores
complejos parawe da como resultado inestabilidad num´erica.
2.6.1. Ejemplo del calculo del l´ımite de estabilidad
Considere el caso pr´actico de una celda c´ubica en un espacio enrejado de tres
dimensiones con ∆x = ∆y = ∆z = ∆. Definiremos el l´ımite de estabilidad de
Courant equivalente para el caso de una c´elula c´ubica:
Slestabilidad−3D =
1
√
3 (2.47)
De (2.46), el crecimiento de la exponencial dominante ocurre en la propagaci´on
de las ondas num´ericas a lo largo de las diagonales del enrejado. Los vectores
de onda relevantes son
e
~k = π
∆(±xˆ±yˆ±zˆ)→| ˜
~k |= π
√
3
∆ →λe =
³2√3
3
´
donde ˆx,yˆy ˆz son vectores unitarios definiendo los principales ejes del enrejado.
Adem´as, de (2.44) resulta en
ξlsuperior =c∆t
s
1 (∆)2 +
1 (∆)2 +
1 (∆)2 =
³c∆t
∆
´√
3 = S√3 (2.49)
Para garantizar una estabilidad num´erica en el caso general, la condici´on de
estabilidad de Courant[9],[5] establece
∆t≤ 1
cq 1
(∆x)2 +(∆y)1 2 + (∆z)1 2
(2.50)
En el caso de dos dimensiones, si ∆x= ∆y= ∆z = ∆s, (2.50) se reduce a
∆t ≤ ∆s
c√2 (2.51)
mientras que en el caso de tres dimensiones, (2.50) se reduce a
∆t ≤ ∆x
c√3 (2.52)
Examinando los valores mostrados arriba muestran que el n´umero m´ınimo de
escalones de tiempo requeridos para viajar en la m´axima dimension de una
unidad de celda es igual a la dimensionalidad de la celda. Por consiguiente, se
requieren por lo menos dos escalones de tiempo para atravesar la diagonal de
una celda cuadrada de dos dimensiones y al menos tres tiempo para atravesar
la diagonal de una celda c´ubica de tres dimensiones.
∆t= ∆x
2c (2.53)
dondec es la velocidad de la luz en el espacio libre. La ecuaci´on (2.53) cumple
con la condici´on de estabilidad de Courant y fue elegida adem´as por raz´on
de simplificaci´on del factor de ponderaci´on de las ecuaciones (2.29) y (2.30),
quedando como
1
√ε
0µ0 ∆t
∆x =c
∆x/2·c
∆x =
1
2 (2.54)
de donde se observa que dicha ponderaci´on engloba la determinaci´on de tama˜nos
de celda espacial y temporal adem´as de la normalizaci´on propuesta sobre las
ecuaciones de Maxwell.
2.6.2. Dispersi´on num´erica
Se le llama dispersi´on num´erica a la propagaci´on de diferentes longitudes de
on-da num´ericas con diferentes velocion-dades en la malla. En el caso de una dimensi´on
la dispersi´on es cero si es empleada la celda temporal adecuada. Generalmente,
la dispersi´on num´erica puede reducirse pero no eliminarse, reduciendo el tama˜no
de celda. El beneficio de disminuir el tama˜no de celda es aparente. Si es
demasia-do grande el tama˜no de celda (muy cercano al l´ımite de Nyquist) la onda dejara
de propagarse.
2.7. Condiciones de frontera de absorc´ıon
Una consideraci´on b´asica del enfoque del m´etodo DFDT para resolver los
est´an definidas en regiones abiertas donde el dominio espacial del campo de
c´alculo no est´a limitado en una o mas direcciones de coordenadas. Es claro que
no se puede almacenar ilimitadamente una cantidad de datos, y por ello, el
do-minio del ´area de c´alculo debe estar limitado en tama˜no. El dominio de c´alculo
debe ser lo suficiente grande para encerrar la estructura de inter´es y contener las
condiciones de l´ımite adecuadas en el per´ımetro exterior del espacio de an´alisis
para simular la extensi´on hacia el infinito.
El rango din´amico del c´alculo del m´etodo FDTD est´a m´as limitado por la
dis-persi´on num´erica y la precisi´on de las definiciones de las estructuras a ser
mo-deladas que los mec´anismos empleados para evitar las reflexiones de las ondas
num´ericas en la superficie de los l´ımites del espacio de c´alculo.
La soluci´on m´as pr´actica de actualizar los valores de los campos en la superficie
de la malla es empleando las condiciones de frontera de absorci´on (CFA), algunas
veces llamadas como condiciones de frontera de radiaci´on (CFR). En el caso de
una dimension, la condici´on requerida es simple y exacta porque se utiliza un
onda plana normal que incide en los bordes de la malla. Para esto, el simple
retraso en la propagaci´on de las ondas electromagn´eticas pueden ser usadas. Sin
embargo, en el caso de dos y tres dimensiones el grado de dificultad aumenta
porque las ondas num´ericas no son normalmente incidentes al borde de la malla
por lo que las ondas no son planas como se indica en una dimensi´on.
Para el caso de una dimensi´on se simula un pulso en el espacio libre que se origina
en el centro y viaja hacia fuera; sin embargo, el m´etodo no prevee condiciones
de frontera que absorban el pulso y con ello evitar que los campos E~ y H~ sean
reflejados hacia el espacio de an´alisis. La problem´atica surge en la frontera si
se anulacen los campos de forma arbitraria para evitar posibles reflexiones. Es
decir, para el c´alculo del campo H~ es necesario conocer los valores cercanos
per´ımetro del espacio de an´alisis no contar´a con los datos de las componenetes
vecinos. Adem´as, se sabe que no hay fuentes externas al espacio del problema,
por lo que la tarea entonces, es determinar el tiempo que le toma una onda
en recorrer un intervalo de tiempo a la velocidad de la luz (c), para establecer
condiciones de frontera adecuadas. Dicho tiempo puede ser obtenido mediante
2∆t= ∆x (2.55)
Esencialmente esta ecuaci´on puede interpretarse como un frente de onda que le
toma dos periodos de tiempo para cruzar una celda. Conociendo esto, es f´acil
poder implementarlo. Calculando la condiciones de absorci´on paraklim, se debe almacenar el valorEx(klim−1) por dos periodos de tiempo y luego colocarlo en
Ex(klim). Estas condiciones deben establecerse en ambos lados del arreglo Ex , es decir
Exn(0) = En−2
x (1)Exn(klim) = Exn−2(klim−1) (2.56)
Sin embargo, como se estableci´o previamente, para el caso de tres dimensiones
las condiciones de frontera no son tan sencillas debido a la complejidad del
espacio de an´alisis.
Existen varios m´etodos para implementar dichas condiciones de frontera, la
may-or´ıa de ellos basados en un algoritmo general conocido como Perfect Matched
Layer(PML). Sin embargo, la complejidad en la implementaci´on de dicho
m´eto-do provocan un efecto negativo en el rendimiento y complejidad del programa.
Un algoritmo relativamente sencillo de implementar en un espacio de an´alisis
dicho algoritmo se basa en el c´alculo del promedio de las componentes cercanas
del campo tangencial a la frontera. Si consideramos un caso de modo de
propa-gaci´on transversal magn´etico (TM) con direcci´on de propapropa-gaci´on en el ejez, el
campo tangencial a la frontera es la componente de campo el´ectricoEz.
Es importante mencionar que este promedio de las celdas adyacentes es el
co-rrespondiente a dos intervalos de tiempo antes del momento actual. Por ejemplo
las condiciones de frontera en el plano k = 0 con 0 < i < ilim y 0< j < jlim,
estan dadas por:
En+1
z (i, j, k) = En
−1
z (i−1, j+ 1,1) +En
−1
z (i, j+ 1,1) +En
−1
z (i+ 1, j+ 1,1)
+En−1
z (i−1, j,1) +En
−1
z (i, j,1) +En
−1
z (i+ 1, j,1) +En−1
z (i−1, j−1,1) +En
−1
z (i, j−1,1) +En
−1
z (i+ 1, j−1,1)
9 (2.57)
A lo largo de toda la frontera, el promedio estar´a en funci´on del n´umero de
celdas vecinas en espacio y tiempo anteriores a aquella que se encuentra en la
frontera del espacio de an´alisis.
2.8. Fuentes num´ericas
El modelado de problemas de ingenier´ıa utilizando el m´etodo DFDT hace
nece-saria la introducci´on de fuentes num´ericas de excitaci´on que generen ondas
num´ericas que simulen ondas electromagn´eticas.
Las fuentes pueden clasificarse como duras o suaves [9]. Una fuente dura forza
al campo presente a adquirir un valor independiente de los campos vecinos, lo
cual significa que las ecuaciones actualizadas no pueden actualizar los valores
del campo en la posici´on de la fuente. Una fuente suave, a su vez, permite
2.8.1. Funcionalidad de la fuente
Un tipo de fuente com´unmente utilizada es aquella que genera una onda senoidal
continua de frecuencia f0, es decir
f(t) =E0sen(2πf0n∆t) (2.58)
Otro tipo de fuente provee un pulso gaussiano con un contenido espectral de
cd finito que esta centrado a un escal´on de tiempo n0 y tiene una factor de decaimiento de 1/e enndecaimiento escalones de tiempo:
f(t) = E0e[(n
−n0)/ndecaimiento]2
(2.59)
Un tercer tipo de fuente provee un contenido cero de cd, es una se˜nal seno
modulada (paso banda) por medio de un pulso gaussiano cuyo espectro de
frecuencia es simetrico respecto a f0. El pulso esta centrado en el escal´on de tiempo n0 y tiene una factor de decaimiento de 1/e en ndecaimiento escalones de tiempo:
f(t) =E0e[(n−n0)/ndecaimiento] 2
sen(2πf0(n−n0)∆t) (2.60)
Las ondas num´ericas se propagan simetricamente en todas direcciones desde la
2.8.2. Fuente dura
Una fuente dura puede establecerse mediante la asignaci´on de una funcion de
tiempo deseada en las componentes de campo magn´etico o el´ectrico espec´ıficos
en el enrejado del m´etodo FDTD. Por ejemplo, en una cuadr´ıcula de una
dimen-sion, una fuente dura en Ez puede ser establecida en el punto is para generar una onda sinusoidal continua que se apaga cuandon= 0, cuya expresi´on queda
como
Ez|nis =E0sen(2πf0n∆t) (2.61)
El campo el´ectrico en el punto is es forzado a contener el valor determinado por la fuente y es independiente de actualizar el conjunto de ecuaciones. Sin
embargo, existen varias dificultades al emplear esta fuente. Como el escalonado
de tiempo se obtiene continuamente, tanto el estado de equilibrio sinusoidal
como la respuesta al impulso despu´es de un tiempo, es notable que la onda
num´erica reflejada eventualmente regrese a la posici´on del cuadriculado de la
fuenteis. Y debido a que el campo el´ectrico total se espec´ıfica enis sin respecto a ninguna onda reflejada posible en el cuadriculado (de ah´ı el t´ermino fuente
dura), la fuente dura causa una retroreflecci´on de estas ondas en is hac´ıa atr´as del material de int´eres.
2.8.3. Fuente suave
Una manera sencilla de mitigar la naturaleza reflectiva de la fuente dura es
permitiendo un nuevo valor del campo el´ectrico en la posici´on de la fuente is para igualar el valor actualizado m´as el valor del campo el´ectrico descrito por
Ez|nis =Ez|
n−1
is +
∆t ε∆x
h
Hy|n
−1/2
is+1/2−Hy|
n−1/2
is−1/2+f(t) i
(2.62)
dondef(t) puede obtenerse de las ecuaciones (2.58)-(2.60). La relaci´on en (2.62)
es conceptualmente similar a la fuente resistiva de voltaje [9].
2.9. Recursos Computacionales
Cuando consideramos usar el m´etodo DFDT para resolver un problema en
par-ticular es pertinente considerar si los recursos computacionales disponibles son
suficientes para proveer una soluci´on al problema. Mientras se trabaje en el
dominio del tiempo, se debe considerar el tama˜no de la geometr´ıa de an´alisis
cuando se mide en t´erminos de la longitud de onda mas corta. Esto es porque
el tama˜no del objeto en t´erminos de longitudes de onda determina el n´umero
de celdas, lo cual determina la capacidad de almacenamiento computacional
requerido.
2.10. Resumen
En este cap´ıtulo se introdujeron las ecuaciones de Maxwell en su forma
di-ferencial en el dominio del tiempo cuya importancia radica en que pueden ser
discretizadas empleando el operador de difrencia finita central de segundo orden.
Con la introducci´on de la c´elula de Yee se ubica cada una de las componentes
de campoE~ y H~ en una malla de tres dimensiones, que implica tanto un
inter-calamiento espacial y temporal de los valores de campo. Para obtener una mayor
precisi´on en los resultados, es necesario determinar un tama˜no de celda espacial
adecuado respecto a la longitud de onda manejada. La selecci´on del tama˜no
obtenido el taman˜no de celda espacial se establece el tama˜no de la celda
tempo-ral que garantice la estabilidad num´erica del m´etodo. La simulaci´on de diversos
problemas implican cumplir con estas condiciones y adem´as la implementaci´on
de condiciones de frontera de absorci´on en los l´ımites del espacio de an´alisis
del m´etodo para evitar reflexiones de amplitudes de energ´ıa electromagn´etica
INMERSA EN DIEL´
ECTRICO CON P´
ERDIDAS
En el presente cap´ıtulo se presenta una breve introducci´on sobre la problem´atica
existente en la elaboraci´on de circuitos para frecuencias elevadas. Adem´as, se
muestra el modelado de la estructura guiada propuesta a manera de alternativa
para las interconexiones electr´onicas en dichos circuitos.
3.1. Introducci´on
Como alguna vez fue vaticinado por G.E. Moore [3], el incremento en las
frecuen-cias de operaci´on de los microprocesadores ha crecido de manera exponencial
en los ´ultimos a˜nos. Este fen´omeno ha sido un reto importante que enfrentan
hoy d´ıa las tecnolog´ıas de fabricaci´on de circuitos integrados y de placas de
interconexi´on de dispositivos electr´onicos, problema que trae consigo un
incre-mento en las velocidades de transmisi´on para la conexi´on entre dichos
dispo-sitivos procesadores y los elementos electr´onicos perif´ericos. Esta problem´atica
es extensiva a cualquier equipo electr´onico cuyas frecuencias de operaci´on est´en
alcanzando, e incluso rebasando, aquellas del orden de las microondas, como los
equipos utilizados en telecomunicaciones.
La problem´atica consiste principalmente en los efectos intr´ınsecos de la
natura-leza de los materiales utilizados en la fabricaci´on de conexiones para las placas
de circuito impreso y dispositivos electr´onicos causados por frecuencias de
op-eraci´on elevadas (i.e.f >3GHz). Estos problemas consisten en la p´erdida de la
met´alicas [17].
Una alternativa interesante en la soluci´on a dicha problem´atica ser´ıa el uso de
la fot´onica de silicio. La fibra ´optica y los distintos elementos involucrados en
la transmisi´on y recepci´on de se˜nales ´opticas, han demostrado resultados
im-portantes que solventar´ıan necesidades en cuanto a ancho de banda y a tasas
de transferencia [23] en la interconexi´on de dispositivos electr´onicos,
propor-cionando adem´as, calidad en la se˜nal y una buena soluci´on para problemas de
interacomplamiento.
Sin embargo, la adopci´on de dicha vertiente tecnol´ogica como base para la
construcci´on de interconexiones electr´onicas implicar´ıa un complejo cambio de
paradigma que obligar´ıa a remplazar muchos elementos involucrados en el dise˜no
y elaboraci´on de dichas conexiones, lo que trae consigo un incremento en la
com-plejidad y los costos de producci´on de los elementos electr´onicos.
Desde principios de la d´ecada de 1950, ha habido un importante incremento en
las tecnolog´ıas de construcci´on de medios guiados para frecuencias del orden de
las microondas y de las ondas milim´etricas en gu´ıas hechas de diel´ectrico,
co-mo se cita en [10]. Particularmente la investigaci´on sobre l´ıneas de transimisi´on
planares y cuasiplanares a partir de la d´ecada de 1970 [11], [12] trajo consigo
un importante desarrollo en las t´ecnicas de construcci´on de circuitos para altas
frecuencias. Sin embargo, las gu´ıas de onda de diel´ectrico han recibido poca
aten-ci´on para el dise˜no de circuitos de microondas y de ondas milim´etricas debido a
que poseen problemas como p´erdidas por radiaci´on debida a discontinuidades y
dificultad en la transici´on modal hacia circuitos planares [10]. Dichos problemas
fueron parcialmente resueltos con la creaci´on de gu´ıas diel´ectricas no radiativas
[16]. No obstante, debido a los problemas a´un existentes en el uso de gu´ıas de
onda diel´ectricas, durante los primeros a˜nos de la presente d´ecada se han hecho
co-nexiones electr´onicas. Una vertiente tecnol´ogica importante sobre circuitos para
alta frecuencia es la de circuitos integrados en sustrato (SIC) [13]. Este concepto
unifica las integraciones monol´ıticas e h´ıbridas de varios circuitos planares y no
planares elaborados en sustrato simple y/o plataformas multicapa. Un tipo de
SIC es la gu´ıa de onda integrada en sustrato (SIW), sobre las cuales se han hecho
importantes investigaciones y se han obtenido resultados interesantes [15] que
plantean la posibilidad de migraci´on en las tecnolog´ıas de interconexi´on de alta
velocidad entre dispositivos electr´onicos a este esquema evolutivo de conexi´on.
En el presente cap´ıtulo se hace el modelado y el an´alisis electromagn´etico de
una estructura guiada basada en una gu´ıa de onda de placas planas paralelas
inmersa en sustratos diel´ectrico tanto de ´ındice de refracci´on constante como
variable, con lo que se pretende establecer bases para la experimentaci´on
me-diante simulaci´on y poder establecer esta vertiente como una alternativa en las
tecnolog´ıas de interconexi´on electr´onica de alta velocidad.
3.2. Gu´ıa de onda de placas planas paralelas
Este tipo de gu´ıa de onda est´a hecho de dos conductores planos paralelos con
un medio diel´ectrico llenando el espacio entre ambos conductores. El an´alisis
electromagn´etico de dicha gu´ıa de onda es la base sobre la cual se construye el
modelo de la estructura guiada propuesta para interconexiones electr´onicas de
alta velocidad.
Para comenzar el an´alisis, se asumen campos arm´onicos con una dependencia
de ejωt y una direcci´on de propagaci´on a lo largo del eje z. De esta forma los campos magn´etico y el´ectrico pueden ser escritos como
~
~
H(x, y, z) = [~h(x, y) + ˆzhz(x, y)]e
−jβz
, (3.2)
donde~e(x, y) y~h(x, y) representan los componentes de los campos transversos
(ˆx,yˆ) el´ectrico y magn´etico, mientras queez yhz son las componentes de campo longitudinales el´ectrico y magn´etico. En las ecuaciones (3.1) y (3.2) la onda se
est´a propagando en direcci´on +z. Es importante tambi´en mencionar que si
exis-ten p´erdidas por material conductor o diel´ectrico, la constante de propagaci´on
ser´a compleja, esto es,jβ ser´ıa reemplazada conγ =α+jβ, tema que se analiza
m´as adelante.
Asumiendo que la gu´ıa de onda se encuentra en una regi´on libre fuentes, las
ecuaciones de Maxwell en su forma arm´onica pueden ser escritas como
∇ ×E~ =−jωµ ~H, (3.3)
∇ ×H~ =jωε ~E. (3.4)
Con una dependencia dee−jβz
ˆ
z, las tres componentes de cada una de las
ecua-ciones vectoriales de arriba pueden ser reducidas a las siguientes
∂Ez
∂y +jβEy =−jωµHx, (3.5)
−jβEx−
∂Ez
∂x =−jωµHy, (3.6)
∂Ey
∂x −
∂Ex
∂Hz
∂y +jβHy =jωεEx, (3.8)
−jβHx−
∂Hz
∂x =jωεEy, (3.9)
∂Hy
∂x −
∂Hx
∂y =jωεEz. (3.10)
Las seis ecuaciones de arriba pueden ser resueltas para las cuatro componentes
de campo transversales en terminos deEz y Hz. Buscando la soluci´on para Hx utilizando las ecuaciones (3.5) y (3.9) se tiene
−jβHx−
∂Hz
∂x =ωε
"
1
β
Ã
−jωµHx−
∂Ez
∂y
!#
,
expresi´on que puede ser reducida a
−jβHx+
jω2εµH x β =− ωε β ∂Ez ∂x + ∂Hz ∂y .
Resolviendo paraHx
Hx =
Ã
jωε ω2εµ−β2
!
∂Ez
∂y −
Ã
jβ ω2εµ−β2
!
∂Hz
∂x .
Definiendok2
c =k2−β2 como el n´umero de onda de corte, donde k=ω√µεes el n´umero de onda del material que llena la gu´ıa de onda, la ecuaci´on de arriba
queda
Hx =
j k2
c
Ã
ωε∂Ez
∂y −β
∂Hz
∂x
!


![Fig. 2.4: Posici´on de las componentes vectoriales de campo el´ectrico y magn´etico en unaunidad de c´elula c´ubica de una malla espacial de Yee de dimensiones ∆x por ∆ypor ∆z [4].](https://thumb-us.123doks.com/thumbv2/123dok_es/4941773.74287/36.595.170.455.51.257/posici-componentes-vectoriales-ectrico-unaunidad-elula-espacial-dimensiones.webp)