Diseño e Implementación de un Framework Para Desarrollos Controladores PID, Medición de Parámetros de Estimación e Identificación Bajo Plataforma Rockwell y Plataformas de Procesos
120
0
0
Texto completo
(2) 2. Dedicatoria. Este proyecto está dedicado cada persona Que de forma directa en indirecta Pudieron contribuir con el proyecto A mi abuela por su infinito apoyo Y darme la oportunidad de llevar un proceso Académico.
(3) 3. Agradecimiento. A mi familia por su apoyo incondicional Siempre resultará difícil agradecer a todos aquellos que De una u otra manera nos han acompañado y apoyado En nuestra estadía en la Universidad. A nuestras familias por su apoyo incondicional A nuestro tutor por su disposición y ayuda En el desarrollo este proyecto..
(4) 4. RESUMEN Se realizó un Framework que permita estimular sistemas con las señales: paso, cuadrada y seudoaleatoria, los datos obtenidos son utilizados para identificación de la dinámica de la planta con el fin de obtener un controlador de topología PID que mejor se adapte a la misma, medición de parámetros en tiempo real e identificación en tiempo real, los objetivos del proyecto son exponer el procedimiento paso a paso y que sea una guía para el diseño y la implementación de controladores por medio de autómatas programables, optimizar la programación para el momento de generar cambios y hacer que el las modificaciones y el mantenimiento al código se realice de una forma más fácil.. Para ello el Framework y las librerías son hechas para RSlogix 5000, y la simulación de los sistemas son desarrolladas en Matlab (Matrix Laboratory), se dotan de unas prácticas que ayudaran al estudiante en aspectos básicos como el manejo de las librerías, una introducción al RSlogix 5000, comunicación OPC (Open Platform Communications) básica, manejo de identificación(Toolbox Ident y el realizado), parámetros de diseño y generación de controladores (PD(siglas), PI (siglas), PID (siglas)) ,ajuste y medición de parámetros..
(5) 5. Abstract a framework which can stimulate systems signals was performed: step, square or pseudo-random, the data obtained is used to identify the dynamics of the plant in order to obtain a PID controller topology best suited to it, the objectives are expose step and is a guide for the design and implementation of controllers through process automation systems, optimize programming time to create change and make the changes and maintaining the code carried out in an easier way.. For this, the Framework and libraries are made to RSLogix 5000, and simulation systems are developed in Matlab (Matrix Laboratory), they are provided with an internship to assist the student in basic issues such as the management of libraries, an introduction to RSLogix 5000 communication OPC (Open Platform communications) network, handling identification (Ident Toolbox and realized), design parameters and generation of controllers (PD (acronym), PI (short), PID (acronym)), adjustment and measurement parameter..
(6) 6. Contenido Introducción ................................................................................................................................ 11 1.1 Descripción ........................................................................................................................ 11 1.2 Planteamiento del problema ............................................................................................ 12 Objetivos ..................................................................................................................................... 13 2.1 Objetivo General ............................................................................................................... 13 2.2 Objetivos Específicos ......................................................................................................... 13 Antecedentes .............................................................................................................................. 14 3.1 Proyectos académicos en otros países.............................................................................. 14 3.2 Proyectos de grado en la Universidad Distrital ................................................................ 15 Modelos de identificación ........................................................................................................... 16 4.1 Ecuaciones en diferencias ................................................................................................. 16 4.2 Modelos lineales ............................................................................................................... 18 4.3 Estimación de parámetros en tiempo real ........................................................................ 20 4.4 Modelo de regresión por mínimos cuadrados .................................................................. 20 CONTROLADOR PID DIGITAL ....................................................................................................... 21 5.1 Controlador ....................................................................................................................... 21 5.2 Especificaciones de diseño ................................................................................................ 22 5.3 Acciones básicas de control ............................................................................................. 24 5.3.1 Acción proporcional (P) .............................................................................................. 24 5.3.2 Acción Integral (I) ...................................................................................................... 25 5.3.3 Acción Proporcional Integral (PI) ............................................................................... 26 5.3.4 Acción Proporcional Derivativo (PD) ......................................................................... 29 5.4 Métodos de discretización ................................................................................................ 31 Señales básicas de estimulo ........................................................................................................ 32 6.1 Ejemplo de un sistema de primer orden ........................................................................... 32 6.2 Llevar el sistema a un estado estable ............................................................................... 35 6.3 Experimento realizado con una señal paso....................................................................... 39 6.4 Experimento realizado con una señal cuadrada ............................................................... 45 6.5 Experimento realizado con una señal seudoaletoria ........................................................ 51 Acciones básicas de control Rockwell ......................................................................................... 58 7.1 Muestreo en PLCs de Rockwell ......................................................................................... 58.
(7) 7 7.2 Controlador proporcional ................................................................................................. 61 7.3 Controlador integral .......................................................................................................... 64 7.4 Acción derivativa. .............................................................................................................. 69 Controlador PID de Rockwell ...................................................................................................... 76 8.1 Controlador PID para Rockwell ......................................................................................... 76 8.2 Análisis de PID y polos ....................................................................................................... 81 8.3 Generar bloque que analice parámetros de desempeño en Rockwell ............................. 84 Framework para el manejo de bloques de rockwell ................................................................... 91 CONCLUSION ............................................................................................................................. 100 Bibliografia ................................................................................................................................ 101 ANEXOS ..................................................................................................................................... 104.
(8) 8. Lista de figuras Figura 1 : Modelo ARX ................................................................................................................. 18 Figura 2: Modelo ARMAX ............................................................................................................ 18 Figura 3: Modelo OE .................................................................................................................... 19 Figura 4:Modelo BJ ...................................................................................................................... 19 Figura 5: Análisis de un proceso .................................................................................................. 21 Figura 6: Especificaciones de diseño controlador ....................................................................... 22 Figura 7:Esquema general de proceso con controlador ............................................................. 23 Figura 8: Esquema general de proceso para hallar el error ........................................................ 23 Figura 9: Diagrama de bloques de controlador proporcional ..................................................... 24 Figura 10: Respuesta a distintas ganancias ................................................................................. 25 Figura 11: Diagrama de bloques de controlador PID .................................................................. 26 Figura 12: Respuesta a distintas ganancias integrales ................................................................ 26 Figura 13: Respuesta de controlador PI a distintas ganancias Kp ............................................... 27 Figura 14: Respuesta de controlador PI a distintas ganancias Ki ................................................ 28 Figura 15: Respuesta de controlador PI a distintas ganancias Ki y Kp ........................................ 28 Figura 16: Respuesta de Controlador PD a distintas ganancias Kp y Kd ..................................... 29 Figura 17: Respuesta de controlador PID .................................................................................... 31 Figura 18: Planta de nivel de cilindro acostado .......................................................................... 32 Figura 19: Funcion de transeferencia generada en simulink ...................................................... 34 Figura 20: Esquema de señal Step............................................................................................... 35 Figura 21: Diagrama de clases del Step ....................................................................................... 36 Figura 22 Diagrama de flujo de Step ........................................................................................... 37 Figura 23: Archivo de propiedades de Step generado en Rockwell............................................ 38 Figura 24: Bloque de funcion Step .............................................................................................. 38 Figura 25: Ladder de la función Step ........................................................................................... 39 Figura 26: Esquema de señal pasó .............................................................................................. 39 Figura 27: Diagrama de clases de la señal paso .......................................................................... 41 Figura 28: Diagrama de flujo de la señal paso ............................................................................ 42 Figura 29: Archivo de propiedades de paso generado en Rockwell ........................................... 43 Figura 30: Bloque de la señal paso .............................................................................................. 43 Figura 31: Ladder de la función paso .......................................................................................... 44 Figura 32: Esquema de estímulo del sistema .............................................................................. 44 Figura 33: Análisis de muestreo para sistema de primer orden ................................................. 44 Figura 34: Identificacion con señal paso ..................................................................................... 45 Figura 35: Esquema de la señal cuadrada ................................................................................... 46 Figura 36: Diagrama de clases de la señal cuadrada ................................................................... 47 Figura 37: Diagrama de flujo de la señal cuadrada ..................................................................... 48 Figura 38: Archivo de propiedades generado por Rockwell ....................................................... 49 Figura 39: Bloque de la señal cuadrada ...................................................................................... 49 Figura 40: Ladder de la señal cuadrada....................................................................................... 50.
(9) 9 Figura 42: Identificación estimulada con señal cuadrada ........................................................... 50 Figura 43: Esquema de la señal seudoaleatoria .......................................................................... 51 Figura 44: Diagrama de clases de la señal seudoaleatoria.......................................................... 53 Figura 45: Diagrama de flujo de la señal seudoaleatoria ............................................................ 54 Figura 47: Archivo de propiedades de seudoaleatoria generado por Rockwell ........................ 55 Figura 48: Bloque de seudoaleatoria .......................................................................................... 55 Figura 49: Ladder de seudoaleatoria........................................................................................... 56 Figura 50: Identificación al estímulo con seudoaleatoria ........................................................... 56 Figura 51: Esquema de controlador generado por autómata..................................................... 58 Figura 52: Generar nueva rutina en Rockwell ............................................................................. 59 Figura 53: Seleccionar el periodo de muestreo en Rockwell ...................................................... 59 Figura 54: Análisis de un retraso ................................................................................................. 60 Figura 55: Diagrama de flujo de retardo ..................................................................................... 60 Figura 56: Esquema general de controlador proporcional ......................................................... 61 Figura 57: Archivo de propiedades de controlador proporcional generado por ROCKWELL ..... 63 Figura 58: Bloque de Ganancia.................................................................................................... 63 Figura 59: Ladder de ganancia .................................................................................................... 64 Figura 60: Diagrama de bloques de integrador........................................................................... 65 Figura 61: Diagrama de flujo de integrador ................................................................................ 65 Figura 62: Diagrama general de integrador ................................................................................ 66 Figura 63: Archivo de propiedades de Integral generado por Rockwell ..................................... 68 Figura 64: Bloque de integral ...................................................................................................... 68 Figura 65: Ladder de integral ...................................................................................................... 69 Figura 66: Diagrama de bloques de derivador ............................................................................ 70 Figura 67: Diagrama de flujo de derivador.................................................................................. 71 Figura 68: Diagrama general de derivador.................................................................................. 72 Figura 69: Archivo de propiedades derivador generado por Rockwell ....................................... 74 Figura 70: Bloque derivador ........................................................................................................ 74 Figura 71: Ladder de derivador ................................................................................................... 75 Figura 72: Diagrama de bloques de PID ...................................................................................... 76 Figura 73: Diagrama de bloque Pid con multiples entradas ....................................................... 77 Figura 74: Diagrama de clases de controlador PID ..................................................................... 78 Figura 75: Diagrama general de entrada del bloque PID ............................................................ 79 Figura 76: Diagrama general de salida del bloque PID................................................................ 80 Figura 77: Diagrama de bloques PID ........................................................................................... 82 Figura 78: Parámetros de desempeño ........................................................................................ 84 Figura 79: Máximo sobre impulso ascendente ........................................................................... 85 Figura 80: Máximo sobre impulso descendente ......................................................................... 86 Figura 81: Diagrama de flujo de Maximo sobre impulso ............................................................ 87 Figura 82: Análisis de tiempo de estabilización .......................................................................... 88 Figura 83: Diagrama de flujo de tiempo de estabilización .......................................................... 89 Figura 84: Bloque de parámetros ................................................................................................ 90 Figura 85: Ladder de parametros ................................................................................................ 90 Figura 86: Diagrama de OPC........................................................................................................ 91 Figura 87: OPC matlab ................................................................................................................. 92.
(10) 10 Figura 88: OPC RSlinx .................................................................................................................. 93 Figura 89: Comunicación por RSlinx ............................................................................................ 94 Figura 90: Template ganancia proporcional ............................................................................... 94 Figura 91: Template de la ganacia integral ................................................................................. 95 Figura 92: Template de Ganancia Derivativa ............................................................................. 95 Figura 93: Template con propiedades de controlador................................................................ 96 Figura 94: Template para parametros de diseño ........................................................................ 96 Figura 95: Template con propiedades de la señal pasó .............................................................. 97 Figura 96: Template con propiedades de la señal cuadrada ...................................................... 97 Figura 97: Template con propiedades de la señal seudoaleatoria ............................................. 98 Figura 98: Template visualizar señal de estimulo ....................................................................... 98 Figura 99: Template de identificación ......................................................................................... 99.
(11) 11. Introducción 1.1 Descripción. La implementación de controladores PID es una de las más usadas a nivel industrial en el control de proceso, los primeros PID se hacían de forma análoga con circuitos integrados, resistencias variables, condensadores, etc… los cuales dependiendo del entorno podrían generar complicaciones a la hora de aplicarse ya que los montajes pueden volverse robustos, ruido electromagnético, un complejo ajuste y dificultades para aplicarse en ciertos sistemas por una infinidad de motivos. A medida que la electrónica digital ha empezado a evolucionar por medio de sistema programables se han remplazar los PID análogos a PID digitales ya que suelen ser mucho más factibles y más versátiles a la hora de su realización y su implementación, también los montajes se reducen bastante.. Se realiza un Framework que permita estimular sistemas con las señales (paso, cuadrada y seudoaleatoria) correspondiente se identificación para por ultimo con estos datos aplicar un controlador de topología PID que mejor se adecue , la idea de este proyecto es hacer las pautas y que sea el camino para la realización de controladores por medio de autómatas programables , como se debe realizar la programación de la mejor manera para el momento de generar cambios y hacer mantenimiento al código se haga de una forma más fácil. Para esto el Framework y las librerías son hechas para rslogix 5000, y la simulación de los sistemas son hechas en Matlab, también se dotan de unas prácticas que ayudaran al estudiante en aspectos básicos, el manejo de las librerías, una introducción RSlogix 5000, comunicación OPC básica, manejo de identificación, parámetros de diseño y generación de controladores (PD, PI, PID) y medición de parámetros..
(12) 12. 1.2 Planteamiento del problema La implementación de controladores PID se tienden a realizar e implementar con unas prácticas de diseño deficientes y con una mala optimización, la idea es hacer una herramienta fácil de aplicar, con mantenimiento simple, que pueda ser ajustada caliente si el sistema lo permite, enfocada a que los estudiantes puedan aplicar sistemas de control digital de la forma más adecuada para cualquier tipo de proceso.
(13) 13. Objetivos 2.1 Objetivo General Diseñar e implementar controladores PID digitales por medio de herramientas de desarrollo de PLCs para múltiples lazos de control.. 2.2 Objetivos Específicos . Generar las señales básicas de estimulación de sistemas SISO las cuales son (señal paso, señal cuadrada y señal seudoaleatoria).. . Generar modelos estimados de primer y segundo orden por medio de un PLC.. . Generar acciones básicas de control, ganancia proporcional, ganancia integral y ganancia derivativa.. . Crear un bloque PID con las siguientes características (Funcione en paralelo o serie PID simple optimizado, medición de parámetros de desempeño: tiempo de estabilización, máximo sobre impulso y error de estado estacionario.. . Framework para la implementación de los bloques del PLC.
(14) 14. Antecedentes 3.1 Proyectos académicos en otros países Título: “Auto-tuning of PID Parameters with Programmable Logic Controller ”, Autoajuste de parámetros de PID con controlador lógico programable “.[1]. . . Autor: Dilsad Engin ,Department of Control and Automation Technology Ege University ,and Mustafa Engin , ,Department of Control and Automation Technology Ege University. . Año 2013. . Descripción : Diseño de PID que se ajusta automáticamente por Ziegles –Nichols por medio de la herramienta Simulink de Matlab para ayudar a los programadores en la programación de PLCs. Título : “Study of PID Control System For Ant Colony Algorithm” Estudio de sistemas de control PID para un algoritmo de colonia de hormigas [2] . Autor : Hong He ,Tianjin University of Technology ,Fang Liu , Tianjin University of Technology, Li Li , Tianjin University of Technology , Yi Wu , Tianjin University of Technology , JinRong Yang , Tianjin Key Laboratory For Control Theory and Application in Complicated System ,Lei Su, and Tianjin Key Laboratory For Control Theory and Application in Complicated System.. . Año : 2009. . Descripción: Propone soluciones de sistemas de control PID basado en el algoritmo de colonia de hormigas, ya que los parámetros de PID no tienen forma de auto adaptarse..
(15) 15. 3.2 Proyectos de grado en la Universidad Distrital Título : “Implementación de PID Discreta ”[3] . Autor: Eder Leandro Cuesta Calderón, Universidad Distrital Francisco José de Caldas.. . Año : 2010. . Descripción: Adaptar Bloques de PID y toolbox IDENT para mejorar aplicaciones y que se adapten a las dinámicas de los estudiante.
(16) 16. Modelos de identificación 4.1 Ecuaciones en diferencias Una ecuación en diferencias se encuentra definida por el modelo del siguiente tipo [4][5][6][7] .. ( ). ( ). ( )/. ( ). ( )). (1.1). Donde ( ). Y. (. ( ). (1.2). ) Es un vector de valores arbitrarios para una función no lineal.. Otra forma de escribir una ecuación diferencial para un sistema de primer orden es introduciendo un numero de variables internas .La expresión para este tipo de variables internas se da de la siguiente forma. ( ). ( ). (1.3). E introducimos en un vector ( ) ( ). (1.4) (. ( )). La ecuación en diferencias escrita para un sistema de primer orden es ̇( ) Donde (. ( ( ) ( )). (1.5). ) es una función vectorial con n componentes ( (. ). ). (1.6) ( (. Puede hacerse de la siguiente expresión. )).
(17) 17. ̇ ( ) ̇ ( ). ̇ ( ). ( ( ) ( ( ). ( ( ). ( ) ( ) . . .. ( ) ( ). ( )) ( )) (1.7). ( ). ( ). ( )). Las salidas del modelo se calculan a partir de las variables internas ( ): entradas ( ). ( ( ) ( )). ( ) y las. (1.8). Puede hacerse de la siguiente expresión ( ) ( ). ( ). ( ( ) ( ( ). ( ( ). ( ) ( ) . . .. ( ) ( ). ( )) ( )) (1.9). ( ). ( ). ( )). Al final los modelos del (1.6) y los modelos del (1.9) siguientes ecuaciones en tiempo discreto. (. ) ( ). ( ( ) ( )) ( ( ) ( )). corresponden a las. (1.10a) (1.10b).
(18) 18. 4.2 Modelos lineales Existen sistemas y subsistemas que no pueden ser modelados en base a percepciones físicas. La razón puede ser que la función que representa el sistema no puede ser identificada por variables físicas o no se pueden relacionar. Es entonces posible utilizar modelos estándar que por experiencia son capaces de manejar una amplia gama de sistemas dinámicos. Los sistemas lineales constituyen la clase más común de modelos estándar. Estos modelos nos dicen su tamaño (orden del sistema) y pueden ser ajustados con valores del sistema (datos)[8] . El modelo ARX es de la forma ( ). ( ). ( ). (2.1). Que puede ser representado. e(t). U(t). ∑. B. Y(t). 1/A. Figura 1 : Modelo ARX. . El modelo ARMAX está representado de la forma ( ). ( ). ( ). (2.2). Que puede ser representado e(t). C. U(t). B. ∑. Figura 2: Modelo ARMAX. 1/A. Y(t).
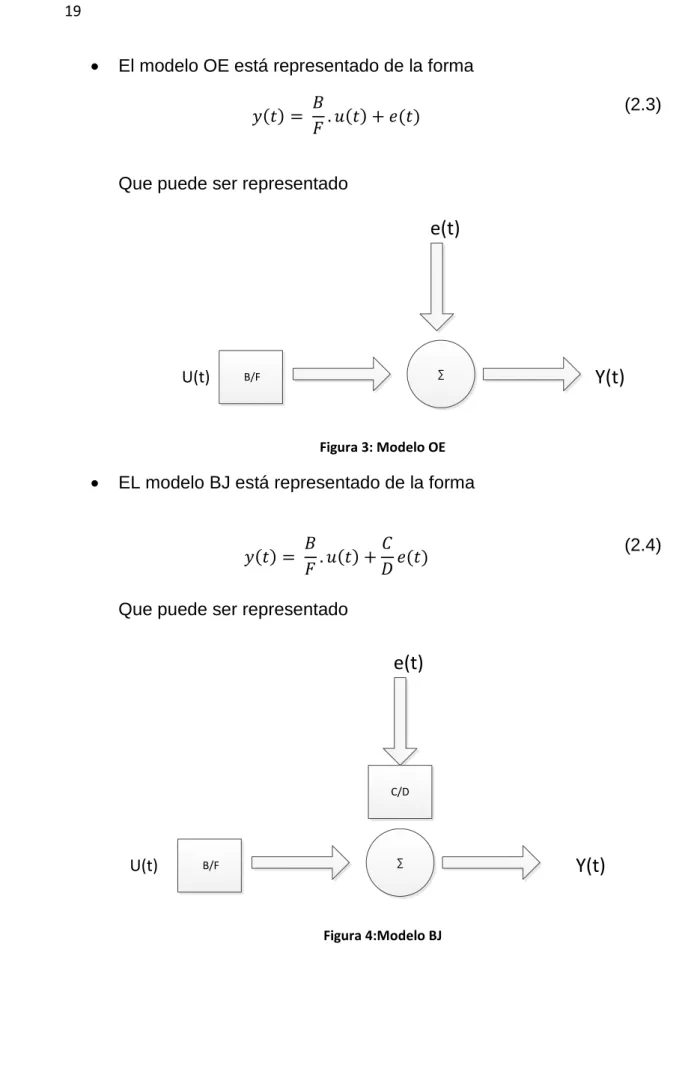
(19) 19. . El modelo OE está representado de la forma ( ). ( ). (2.3). ( ). Que puede ser representado. e(t). U(t). ∑. B/F. Y(t). Figura 3: Modelo OE. . EL modelo BJ está representado de la forma. ( ). ( ). (2.4). ( ). Que puede ser representado. e(t). C/D. U(t). B/F. ∑. Figura 4:Modelo BJ. Y(t).
(20) 20. 4.3 Estimación de parámetros en tiempo real Uno de los modelos más utilizados a la hora de realizar una identificación son los modelos de regresión por mínimos cuadrados y llevarlo a uno de los modelos lineales que se representan de la siguiente forma[9] (). (). (). (). (). (). (). (). (). (5.1). Donde es la variable observada que en términos de control es el valor de salida de un proceso en un instante donde son los parámetros del modelo para ser determinados y son funciones conocidas que quizás depende de otras funciones conocidas. Definiendo los parámetros de modelo en el vector (). ,. -. (5.2). Definiendo las funciones de salida en el vector (). ,. -. (5.3). El modelo es utilizado en unas variables de muestras que en este caso son ( ) , es el instante en el que se toma el dato. La variable ( ) son llamadas variables de regresión las variables * ( ) ( ) + son obtenidas en un experimento. 4.4 Modelo de regresión por mínimos cuadrados Para hallar un resultado apropiado para ecuación (5.1) nos guiamos por la solución de mínimos cuadrados (. ). ∑( ( ). (). ). (5.4). Donde las soluciones del sistema están dadas por. ( ). , ( ). ( ). ( )-. (5.5). El error estimado de las muestras está dado por. ( ). , ( ). ( ). ( )-. El vector que define la ecuación en diferencias está dada.. (5.6).
(21) 21. ( ) (5.7) ( )]. [. Donde la representación del sistema está dada (5.8) ( ( )). (∑. (). ( )). Donde el error residual está dado por (). (). (). (5.9). La ecuación de mínimos cuadrados está representada del siguiente modo. (. ). (5.10). Donde los parámetros del modelo vienen especificados del siguiente modo (. ). (5.11). CONTROLADOR PID DIGITAL 5.1 Controlador El objetivo de los controladores en un sistema es el siguiente.[10]. y(n) PROCESO CONTROLADO. Figura 5: Análisis de un proceso. . Determine que debe hacer el sistema y cómo hacerlo (especificaciones de diseño).
(22) 22. . Determine la configuración del compensador o controlador relativa a como está conectado el proceso del controlador. Determine los valores de los parámetros del controlador para alcanzar los objetivos de diseño.. 5.2 Especificaciones de diseño Especificaciones de diseño Maximo sobreimpulso. VP 1.4. 1.2 Region de establidad 1. VF Region de establidad. Valor (V). 0.8. 0.6 DS 0.4. 0.2. 0 VI Tiempo de estabilizacion. -0.2 0. 5. 10. 15. 20. 25 30 Dominio del tiempo (s). 35. 40. 45. Figura 6: Especificaciones de diseño controlador. Donde los criterios de desempeño están datos por los siguientes parámetros [11][12][13] Máximo sobre impulso está dado por: (6.1). Donde el tiempo de estabilización está dado por el tiempo en que le toma a la señal llegar a la región de estabilidad. Donde el error de estado estacionario está dado por. 50.
(23) 23. <r>. <e>. +. <sc> CONTROLADOR. <y> PROCESO. -. Figura 7:Esquema general de proceso con controlador. Donde el error se define. ( ( ). ( )). (6.2). ( ). ( ). (6.3). ( ). ( ). (6.4). Donde ( ). ( ). ( ). ( ). ( ). ( ). (6.5). Ahora podemos representar el sistema de la siguiente manera.. <r>. <y>. <e>. +. T. C*P. Figura 8: Esquema general de proceso para hallar el error. Ahora la salida queda de la siguiente manera ( ). Definimos el error. ( ). ( ). (6.6).
(24) 24. ( ). ( ). ( ). ( ). (6.7). Al final la definición que de la siguiente manera ( ). ( ) ( ). (6.8). El error queda del siguiente modo. ( ) ( ). ( ). (6.9). 5.3 Acciones básicas de control En los sistemas de control la acción básica es un amplificador simple con ganancia constante K, ese tipo de acción se le conoce formalmente como control proporcional, ya que la señal de control a la salida está relacionada con la entrada del controlador mediante una constante proporcional. Pero para poder alcanzar otros parámetros de diseño se debe integrar y derivar el sistema para generar el comportamiento deseado [14][2][6][15] 5.3.1 Acción proporcional (P) La acción proporcional está dado por. <r>. <e>. +. Kp. Kp.<e>. P. <y>. -. Figura 9: Diagrama de bloques de controlador proporcional. Donde la respuesta del sistema se puede analizar de la siguiente manera..
(25) 25. Respuesta a distintas ganancias. 1. 0.8 referencia Valores con ganancia de 1 Valores con ganancia de 10 Valores con ganancia de 100. Valor (V). 0.6. 0.4. 0.2. 0. 0. 5. 10. 15. 20. 25 Tiempo (s). 30. 35. 40. 45. Figura 10: Respuesta a distintas ganancias. Ventajas . Fácil Aplicación Puede controlar cualquier planta estable. Desventajas . Error de estado de estacionario La falta de inmunidad al ruido. 5.3.2 Acción Integral (I) La acción integral está dada por una proporcional al error acumulado.. ( ). ∫ ( ). ( ). (7.1). 50.
(26) 26. <r>. <e>. +. Ki/s. Ki/s.<e>. <y>. P. -. Figura 11: Diagrama de bloques de controlador PID. Donde la respuesta del sistema se puede dar Respuesta de integrador a distintas ganancias referencia Valores con ganancia de 1 Valores con ganancia de 10 Valores con ganancia de 100. 1.8. 1.6. 1.4. Valor (V). 1.2. 1. 0.8. 0.6. 0.4. 0.2. 0 0. 5. 10. 15. 20. 25 Tiempo (s). 30. 35. Figura 12: Respuesta a distintas ganancias integrales. Ventajas . Error de estado estacionario es 0. Desventajas . Genera sobre impulso en el sistema Genera oscilaciones sobre la referencia. 5.3.3 Acción Proporcional Integral (PI). 40. 45. 50.
(27) 27. Se puede clasificar de dos formas dependiente e independiente La dependiente esta descrita por ( ). ( ). ∫ ( ). ( ). (. ). (7.2). Donde Ti se demonima tiempo integral y es quien ajusta la acción integral O la independiente ( ). ( ). ∫ ( ). (7.3). ( ). Donde cada parte tiene ganancias independientes Respuesta del PI independiente para distintos valores de Kp. Respuesta del PI a distintas ganancias Kp 1.5 referencia Kp = 1 , Ki =1 Kp = 10 , Ki = 1 Kp = 100 , Ki =1. Valor(V). 1. 0.5. 0. 0. 5. 10. 15. 20. 25 Tiempo (s). 30. 35. Figura 13: Respuesta de controlador PI a distintas ganancias Kp. Respuesta del PI independiente para distintos valores de Ki. 40. 45. 50.
(28) 28. Respuesta PI a distintas ganancias Ki = 100 1.8 referencia Kp = 1 , Ki =1 Kp = 1 , Ki = 10 Kp = 1 , Ki =100. 1.6. 1.4. 1.2. Valor (V). 1. 0.8. 0.6. 0.4. 0.2. 0 0. 5. 10. 15. 20. 25 Tiempo (s). 30. 35. 40. 45. 50. Figura 14: Respuesta de controlador PI a distintas ganancias Ki. Respuesta del PI independiente para distintos valores de Ki y Kp Respuesta de PI a varias ganancias Kp y Ki referencia Kp = 1 , Ki =1 Kp = 10 , Ki = 10 Kp = 100 , Ki =100. 1.2. 1. Valor (V). 0.8. 0.6. 0.4. 0.2. 0. 0. 5. 10. 15. 20. 25 Tiempo (s). 30. 35. 40. 45. Figura 15: Respuesta de controlador PI a distintas ganancias Ki y Kp. Con el control proporcional es necesario que exista error para tener una acción de control distinta cero. Con acción integral, un error pequeño positivo siempre nos dará una acción de control creciente y si fuera negativa la señal de control será decreciente. Este razonamiento sencillo nos muestra que el error en régimen permanente siempre será cero. 50.
(29) 29. . Genera oscilaciones sobre la referencia. 5.3.4 Acción Proporcional Derivativo (PD) Se puede clasificar de dos formas dependiente e independiente La dependiente esta descrita por ( ). ( ). ( ). ( ). (. ). (7.4). Donde Td se denomina tiempo Derivativo y es quien ajusta la acción derivativo O la independiente ( ). ( ). ( ). (7.5). ( ). Donde cada parte tiene ganancias independientes Respuesta de PD a distintos ganacias Kp y Kd referencia Kp = 1 , Kd =1 Kp = 10 , Kd = 10 1.2. 1. Valor (V). 0.8. 0.6. 0.4. 0.2. 0. 0. 10. 20. 30. 40. 50 Tiempo(s). 60. 70. 80. 90. Figura 16: Respuesta de Controlador PD a distintas ganancias Kp y Kd. Ventajas . La acción derivativa es anticipada , es decir adelanta la acción de control frente a la aparición de una tendencia de error ,eso tiende a estabilizar el sistema puesto que los retardos en el controlador lo tienden a inestabilizar.. 100.
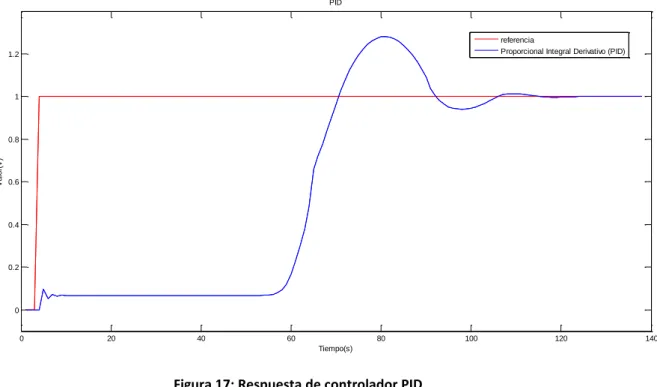
(30) 30. Desventajas . La acción derivativa es prácticamente inaplicable a la presencia de ruido este hace que la variable tome valores contra puestos, cuando la dependiente de ruido entra en señal de error.. Aplicando el filtro de orden uno pasa bajos las ecuaciones quedan de la siguiente manera La dependiente esta descrita por (7.6) ( ). (. ). Donde Td se denomina tiempo Derivativo y es quien ajusta la acción derivativo O la independiente (7.7). ( ). Acción de control Proporcional –Integral –derivativo (PID) Esta acción combinada reúne las ventajas de las tres acciones de control individuales. La ecuación de un controlador con esta acción combinada se obtiene mediante. ( ). ( ). ( ). ∫ ( ). ( ). (. (7.4). ). O la independiente ( ). ( ). ( ). ∫ ( ) ( )(. ). (7.4).
(31) 31. PID. referencia Proporcional Integral Derivativo (PID). 1.2. 1. Valor(V). 0.8. 0.6. 0.4. 0.2. 0. 0. 20. 40. 60. 80. 100. 120. Tiempo(s). Figura 17: Respuesta de controlador PID. 5.4 Métodos de discretización El esquema de PID analógico ha sido usado de manera exitosa en muchos sistemas de control industrial por más de medio siglo El esquema básico de un diseño de control digital está dado por. Tenemos la función de transferencia con propósito de filtrado y control está dada por: ( ) ( ). (7.4). Donde a y b son para mucho controladores digitales coeficientes reales (alguno de estos pueden ser cero) podemos representar. 140.
(32) 32. Señales básicas de estimulo Para generar una identificación se deben buscar las señales de perturbación del sistema de la forma más indicada, La construcción de un modelo para señales de perturbación depende en cierta media de si se trata por separado y si es medible. La respuestas más apropiadas para hallar la respuesta del sistema se debe llevar a un valor estable y su comportamiento al cambio, y ver cómo se comporta en un nivel de energía, luego si el sistema durante su proceso tiene cambios significativos se debe llevar a cabo un estímulo aleatorio con periodo de estabilización del sistema para esto el proceso se deben hallar los siguiente experimentos.[16] . Experimento realizado con una señal paso. Experimento llevado con una señal cuadrada. Experimento con una señal seudoaleatoria.. 6.1 Ejemplo de un sistema de primer orden Para dar una explicación de cómo implementar una identificación apropiada nos basaremos en el modelo de una planta nivel de un cilidro acostado como se muestra en la figura.[17][18][19] Primero las pruebas las hacemos sobre la simulación de una planta de nivel de un cilindro acostado.. Figura 18: Planta de nivel de cilindro acostado. Donde.
(33) 33. = Es el caudal del líquido, Altura del fluido en el tanque = Longitud del tanque Radio de tanque (8.1). = La resistencia del flujo de líquido que está definida como el cambio necesario en la diferencia de nivel líquido para producir un cambio de unidad en la velocidad de flujo. , √. (. (8.2). ). El cambio en la altura del sistema está representado por la ecuación diferencial a partir de la suposición de que el sistema es lineal (. ). (8.3). Donde C equivale a la capacitancia del tanque. (8.4). (. √. ). (8.4). Donde el cambio de nivel de fluido respecto al tiempo se puede representar por (. √. ). (. ). (8.5). (. ). (8.6).
(34) 34. Luego hacemos la ecuación en diferencias en Simulink la cual queda de la siguiente manera.. Figura 19: Funcion de transeferencia generada en simulink. Donde los parámetros L, RH y r son configurables dependiendo de el tipo de modelo del sistema que se quiere. . L : Longitud del tanque r Radio del tanque Rh Resistencia hidráulica del sistema. Para el caso de lo que queremos hacer los valore de L = 15 , r = 5 , Rh un valor de 1..
(35) 35. 6.2 Llevar el sistema a un estado estable El primer paso es llevar el sistema a un estado estable para esto generamos un señal con las siguientes características valor paso. valor inicial tiempo inicial. Figura 20: Esquema de señal Step. En este caso usaremos Rslogix 5000 con el que se genera una señal con esas características, antes de ponernos a trabajar en el código debemos definir los datos de entrada y de salida de salida del sistema.[20][21][22] Los datos de entrada son los que debemos ingresar para saber qué debemos ingresar sobre la rutina que vamos a hacer en este caso son las siguientes. . Habilitar: Esta variable define si está habilitado funcione y reinicia el programa permite un mayor asequibilidad para aplicaciones. Propiedades_step : El cual es un tipo de variable que contiene los datos que queremos modificar del sistema. Los datos de propiedades son relacionados de la siguiente manera . Valor inicial : Es el valor en el que se inicia la señal de estímulo ,en muchos casos se inicia en cero como lo es para este ejercicio ,pero hay sistemas que solo pueden iniciar en ciertos límites para eso se usa esta entrada. . Tiempo inicial: Es un ciclo en el que tarda en pasar del valor inicial al valor de paso este se debe usar dependiendo de las condiciones del sistema..
(36) 36. . Valor Paso: Es el valor al cual se desea estimular para llevar a un modo estable.. Los datos de salida son los datos que queremos obtener de la rutina. . Salida: La señal de estímulo que queremos representar. Bandera Timmer : No sirve para generar banderas para utilizar como herencia en los otros procesos. La lógica de programación que usamos para este tipo de desarrollo es la lógica orientada objetos si realizamos un diagrama de clases nos quedaría del siguiente modo, como en Rslogix las librerías no permiten realizar varios métodos por cada uno se diría que el procedimiento queda comprendido del siguiente modo.. STEP. + valor inicio ; real + valor paso ;real + Tiempo paso ;Dint + Salida ; Real + Bandera timmer ; Boolean. Figura 21: Diagrama de clases del Step. Donde el diagrama de flujo de la función la podemos definir de la siguiente manera..
(37) 37. Habilitar. Esta habilitado. Reiniciar Contador y variables. no. si contado la cantidad de veces que debe estar en el tiempo inicial. Contador > Tiempo inicial. no. si. Salida = valor_paso. Bandera_timmer = True. Figura 22 Diagrama de flujo de Step. Salida = Valor_Inicio.
(38) 38. Donde el archivo de propiedades en Rslogix se genera de la siguiente manera. Figura 23: Archivo de propiedades de Step generado en Rockwell. Ahora generamos el bloque sobre la descripción del diagrama de flujo el cual que da la siguiente manera. Para realizar sobre programación por función de bloques. Figura 24: Bloque de funcion Step.
(39) 39. Para realizar programación por Ladder. Figura 25: Ladder de la función Step. O para realizar programación por texto estructurado STEP(STEP,Habilitar,Salida,propiedades,bandera_timmer); Ahora utilizamos el bloque al sistema explicado anteriormente podemos visualizar lo siguiente. 6.3 Experimento realizado con una señal paso Ahora ya conociendo un punto mínimo de referencia ahora si vemos la respuesta del sistema a un estímulo, para esto generamos una señal paso real la cual tiene la siguiente característica.. Figura 26: Esquema de señal pasó.
(40) 40. Definimos los datos de entrada y de salida de salida del sistema. . Habilitar: Esta variable define si está habilitado funcione y reinicia el programa permite un mayor asequibilidad para aplicaciones. Propiedades_paso : El cual es un tipo de variable que contiene los datos que queremos modificar del sistema. Los datos de propiedades son relacionados de la siguiente manera . Valor inicial : Es el valor en el que se inicia la señal de estímulo ,en muchos casos se inicia en cero como lo es para este ejercicio ,pero hay sistemas que solo pueden iniciar en ciertos límites para eso se usa esta entrada. . Tiempo inicial: Es un ciclo en el que tarda en pasar del valor inicial al valor de paso este se debe usar dependiendo de las condiciones del sistema.. . Valor Paso: Es el valor al cual se desea estimular para llevar a un modo estable.. . Tiempo Paso: Es un ciclo en el que tarda en pasar del valor paso al valor final este se debe usar dependiendo de las condiciones del sistema.. . Valor Final: Es el valor que generamos para estimular el sistema y poder realizar identificación. Los datos de salida son los datos que queremos obtener de la rutina. . Salida: La señal de estímulo que queremos representar.. Donde el diagrama de clases que implementamos esta de la siguiente manera.
(41) 41. STEP + valor inicio ; real + valor paso ;real + Tiempo inicio ;Dint + Salida ; Real + Bandera timmer ; Boolean. PASO. + valor final ; real + Tiempo paso ;Dint + Salida ; Real. Figura 27: Diagrama de clases de la señal paso. Ahora realizamos un diagrama de flujo del proceso..
(42) 42. Habilitar. Esta habilitado. Reiniciar Contador y variables. no. si contado la cantidad de veces que debe estar en el tiempo inicial. Contador > Tiempo inicial. no. Salida = Valor_Inicio. si. Salida = valor_paso. contado la cantidad de veces que debe estar en el tiempo inicial. Contador2 > Tiempo paso. no. Salida = Valor_paso. si. Salida = valor_final. Figura 28: Diagrama de flujo de la señal paso.
(43) 43. Donde el archivo de propiedades en Rslogix se genera de la siguiente manera. Figura 29: Archivo de propiedades de paso generado en Rockwell. Ahora generamos el bloque sobre la descripción del diagrama de flujo el cual que da la siguiente manera. Para realizar sobre programación por función de bloques. Figura 30: Bloque de la señal paso. Para realizar programación por Ladder.
(44) 44. Figura 31: Ladder de la función paso. O para realizar programación por texto estructurado. PASO(PASO,Habilitar,Salida,propiedades); Ahora procedemos a estimular el sistema para posteriormente realizar identificación. Señal estimulo. Planta. Figura 32: Esquema de estímulo del sistema Analisis de respuesta a señal paso 1.2. 1 Referencia Planta estimulada 0.8. Valor (V). 0.6. 0.4. 0.2. -0.2. 2T. T. 0. 0. 5. 10. 3T. 15. 4T. 5T. 20. 25 Tiempo (s). 30. 35. Figura 33: Análisis de muestreo para sistema de primer orden. 40. 45. 50.
(45) 45. Ahora podemos a estimular el proceso el cual hemos calculado anteriormente la cual nos da un respuesta del siguiente tipo.. Figura 34: Identificacion con señal paso. El cual por medio del toolbox de Matlab no entrega una función de transferencia del siguiente modo. (9.1). Por el método de identificación para un móldelo de primer orden el cual podemos evidenciar. 6.4 Experimento realizado con una señal cuadrada. Ya que el periodo en que el sistema llega a su estado más alto ahora podemos evidenciar la respuesta a un aumento en nivel y una disminución del nivel para evidenciar cómo se comporta tanto las subidas de energía como de las bajadas para esto generamos una señal de la siguiente forma..
(46) 46. tiempo cuadrada tiempo paso valor cuadrada valor cuadrada. valor paso valor inicial tiempo inicial. Figura 35: Esquema de la señal cuadrada. Definimos los datos de entrada y de salida de salida del sistema. . Habilitar: Esta variable define si está habilitado funcione y reinicia el programa permite un mayor asequibilidad para aplicaciones. Propiedades_cuadrada : El cual es un tipo de variable que contiene los datos que queremos modificar del sistema. Los datos de propiedades son relacionados de la siguiente manera . Valor inicial : Es el valor en el que se inicia la señal de estímulo ,en muchos casos se inicia en cero como lo es para este ejercicio ,pero hay sistemas que solo pueden iniciar en ciertos límites para eso se usa esta entrada. . Tiempo inicial: Es un ciclo en el que tarda en pasar del valor inicial al valor de paso este se debe usar dependiendo de las condiciones del sistema.. . Valor Paso: Es el valor al cual se desea estimular para llevar a un modo estable.. . Tiempo Paso: Es un ciclo en el que tarda en pasar del valor paso al valor final este se debe usar dependiendo de las condiciones del sistema.. . Valor Cuadrada: Es el valor que generamos para decir que tanto sube y baja con respecto a la referencia..
(47) 47. . Tiempo Cuadrada: Valor en el que toma un valor mayor o menor a la referencia.. Los datos de salida son los datos que queremos obtener de la rutina. . Salida: La señal de estímulo que queremos representar.. Donde el diagrama de clases que implementamos esta de la siguiente manera. STEP + valor inicio ; real + valor paso ;real + Tiempo inicio ;Dint + Salida ; Real + Bandera timmer ; Boolean. CUADRADA. + valor Cuadrada ; real + Tiempo paso ;Dint + Tiempo_cuadrada ; Dint + Salida ; Real. Figura 36: Diagrama de clases de la señal cuadrada.
(48) 48. Ahora realizamos un diagrama de flujo del proceso Habilitar. Esta habilitado. no. Reiniciar Contador y variables. Si. STEP1 con las siguentes propiedades. Valor_inicial = valor inicial Valor_paso = valor paso Tiempo_inicial = tiempo_inicial. No. Bandera_timmer1. Si Valor_inicial = valor paso Valor_paso = valor cuadrada + valor paso Tiempo_inicial = tiempo_paso. STEP2 con las siguentes propiedades No. Bandera_timmer2. Si. STEP3 con las siguentes propiedades. Valor_inicial = Valor_paso + valor cuadrada Tiempo_inicial = tiempo_cuadrada. Bandera_timmer3. Valor_cuadrada =(valor cuadrado* -1) Bandera_timmer3 = False. Figura 37: Diagrama de flujo de la señal cuadrada.
(49) 49. Donde el archivo de propiedades en Rslogix se genera de la siguiente manera. Figura 38: Archivo de propiedades generado por Rockwell. Ahora generamos el bloque sobre la descripción del diagrama de flujo el cual que da la siguiente manera. Para realizar sobre programación por función de bloques. Figura 39: Bloque de la señal cuadrada.
(50) 50. Para realizar programación por Ladder. Figura 40: Ladder de la señal cuadrada. O para realizar programación por texto estructurado CUADRADA(CUADRADA,habilitar,salida,propiedades,setpoint); Ahora procedemos a estimular el sistema para posteriormente realizar identificación. Señal estimulo. Planta. Figura 41: Esquema de estímulo con señal cuadrada. Ahora podemos a estimular el proceso el cual hemos calculado anteriormente la cual nos da un respuesta del siguiente tipo.. Figura 42: Identificación estimulada con señal cuadrada.
(51) 51. El cual por medio del toolbox de Matlab no entrega una función de transferencia del siguiente modo.. (9.2). Por el método de identificación para un móldelo de primer orden el cual podemos evidenciar. 6.5 Experimento realizado con una señal seudoaletoria. Este estimulo se genera para probar todas las respuestas estables del sistema y hacer una identificación en un rango de acción indicado, teniendo en cuenta el teorema de muestreo y de estabilidad.. tiempo Histeresis tiempo paso valor Histeresis valor Histeresis. valor paso valor inicial tiempo inicial. Figura 43: Esquema de la señal seudoaleatoria. Definimos los datos de entrada y de salida de salida del sistema. . Habilitar: Esta variable define si está habilitado funcione y reinicia el programa permite un mayor asequibilidad para aplicaciones.. . Propiedades_cuadrada : El cual es un tipo de variable que contiene los datos que queremos modificar del sistema.
(52) 52. Los datos de propiedades son relacionados de la siguiente manera . Valor inicial : Es el valor en el que se inicia la señal de estímulo ,en muchos casos se inicia en cero como lo es para este ejercicio ,pero hay sistemas que solo pueden iniciar en ciertos límites para eso se usa esta entrada. . Tiempo inicial: Es un ciclo en el que tarda en pasar del valor inicial al valor de paso este se debe usar dependiendo de las condiciones del sistema.. . Valor Paso: Es el valor al cual se desea estimular para llevar a un modo estable.. . Tiempo Paso: Es un ciclo en el que tarda en pasar del valor paso al valor final este se debe usar dependiendo de las condiciones del sistema.. . Valor Histéresis: Es el valor que generamos para decir que tanto sube y baja con respecto a la referencia de forma aleatoria entre esos rangos.. . Tiempo Histéresis minimo: Valor en el que toma un valor menor a la referencia de forma aleatoria entre esos rangos.. . Tiempo Histéresis Maximo: Valor en el que toma un valor maximo a la referencia de forma aleatoria entre esos rangos.. Los datos de salida son los datos que queremos obtener de la rutina. . Salida: La señal de estímulo que queremos representar.. Donde el diagrama de clases que implementamos esta de la siguiente manera.
(53) 53. RANDOM. CUADRADA +valor inicial ; Real + valor paso ; Real + valor Cuadrada ; Real + Tiempo inicial ; Dint + Tiempo paso ;Dint + Tiempo cuadrada ; Dint. + fRndxxxxx ; Real. + Salida ; Real. SEUDOALETORIA. +Tiempo histeresis ; Real + Valor histeresis ; Dint. Figura 44: Diagrama de clases de la señal seudoaleatoria. Ahora realizamos un diagrama de flujo del proceso.
(54) 54. Habilitar. Esta habilitado. Generamos numero aleatorio para el valor. no. Reiniciar Contador y variables. Generar numero aleatorio para el tiempo entre valores mínimos y valores máximos. Se generan numeros. Generar señal cudrada con las siguiente propiedades. cuadrada.tiempo_inicial:=.tiempo_inicial; cuadrada.tiempo_paso:=tiempo_paso; cuadrada.tiempo_cuadrada:=propiedades.tiempo_histeresis_inicial + ((.tiempo_histeresis_final -.tiempo_histeresis_inicial)*aleatorio tiempo); cuadrada.valor_inicial:=.valor_inicial; cuadrada.valor_paso:=propiedades.valor_paso; cuadrada.valor_cuadrada:=.valor_histeresis*aleatorio; cuadrada.paso_automatico:=.paso_automatico;. Figura 45: Diagrama de flujo de la señal seudoaleatoria. Ahora procedemos a estimular el sistema para posteriormente realizar identificación. Señal estimulo. Planta. Figura 46: Diagrama Estimulo con señal seudoaleatoria. Ahora podemos a estimular el proceso el cual hemos calculado anteriormente la cual nos da un respuesta del siguiente tipo..
(55) 55. Donde el archivo de propiedades en Rslogix se genera de la siguiente manera. Figura 47: Archivo de propiedades de seudoaleatoria generado por Rockwell. Ahora generamos el bloque sobre la descripción del diagrama de flujo el cual que da la siguiente manera. Para realizar sobre programación por función de bloques. Figura 48: Bloque de seudoaleatoria.
(56) 56. Para realizar programación por Ladder. Figura 49: Ladder de seudoaleatoria. O para realizar programación por texto estructurado SEUDOALEATORIA(SEUDOALEATORIA,habilitar,salida,propiedades, setpoint); Ahora podemos a estimular el proceso el cual hemos calculado anteriormente la cual nos da un respuesta del siguiente tipo.. Figura 50: Identificación al estímulo con seudoaleatoria.
(57) 57. El cual por medio del toolbox de Matlab no entrega una función de transferencia del siguiente modo. (9.3). Por el método de identificación para un móldelo de primer orden el cual podemos evidenciar..
(58) 58. Acciones básicas de control Rockwell Para este capítulo, la idea es dar una noción de cómo se trabaja una ecuación en diferencia por medio de autómatas programables, con se trabaja una función en transferencia y lo que se debe tener en cuenta a la hora de muestrear un sensor, como generar un retardo[23]. Las acciones básicas de control son . Controlador Proporcional Controlador Integral Controlador Derivativo. 7.1 Muestreo en PLCs de Rockwell. Un controlador está dado por el siguiente esquema. A/D. CONVERSOR ANALOGO -DIGITAL. CONTROL. PROCESO. D/A. CONVERSOR DIGITAL -ANALOGO. Figura 51: Esquema de controlador generado por autómata. Como se ha explicado en capítulos anteriores se sabe que conversor análogodigital trabaja dependiendo del periodo de muestreo, por medio de la identificación realizada anteriormente se puede conocer el periodo de muestreo más indicado dependiendo del proceso.[24] En el caso de Rockwell se debe generar una tarea que se ejecute en definición con el periodo de muestreo.
(59) 59. Figura 52: Generar nueva rutina en Rockwell. Seleccionamos la mejor forma de que el sistema se adapte. Figura 53: Seleccionar el periodo de muestreo en Rockwell.
(60) 60. Ahora para el caso de generar los retrasos el sistema funciona de una forma diferente, a continuación se explica una forma de cómo generar retrasos en un PLC.. [0 1 2 3 4] .... [ 0 0 1 2 3 4] .... Buffer. Z. Figura 54: Análisis de un retraso. Con este diagrama de flujo se explica de una forma sencilla.. TOMAR DATO. GUARDAR EN MERIA. ENVIAR VALOR DE SALIDA Y GENERAR RETARDO. No. RETARDO > CONTADOR. SI. SALIDA = DATO DE ENTRADA. Figura 55: Diagrama de flujo de retardo.
(61) 61. 7.2 Controlador proporcional El esquema general de un controlador proporcional. Figura 56: Esquema general de controlador proporcional.
(62) 62. Con esto podemos ver las entrada y salidas del sistema . Habilitar: Esta variable define si está habilitado funcione y reinicia el programa permite un mayor asequibilidad para aplicaciones.. . Entrada: Señal o estímulo a generar ganancia, por lo general es el error o la salida de proceso.. . Propiedades_proporcional : El cual es un tipo de variable que contiene los datos que queremos modificar del sistema. Los datos de propiedades son relacionados de la siguiente manera . Ganancia proporcional: Valor de la ganancia Kp.. . Valor máximo entrada: Limitar la entrada del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento.. . Valor mínimo Entradas: Limitar la entrada del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento.. . Valor máximo salida : Limitar la salida del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento del actuador del proceso. . Valor minimo salida : Limitar la salida del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento del actuador del proceso. Los datos de salida son los datos que queremos obtener de la rutina. . Salida: La señal de estímulo que queremos representar. .. Donde el archivo de propiedades en Rslogix se genera de la siguiente manera.
(63) 63. Figura 57: Archivo de propiedades de controlador proporcional generado por ROCKWELL. Ahora generamos el bloque sobre la descripción del diagrama de flujo el cual que da la siguiente manera. Para realizar sobre programación por función de bloques. Figura 58: Bloque de Ganancia.
(64) 64. Para realizar programación por Ladder. Figura 59: Ladder de ganancia. O para realizar programación por texto estructurado GANANCIA(GANANCIA,habilitar,entrada,salida,propiedades);. 7.3 Controlador integral. La entrada integral está dada por ( ). ∫ ( ). ( ). (10.1). El método de discretización que vamos a utilizar es el método bilineal de Tustin de esta forma tenemos la siguiente relación (10.2). Donde Ts es el periodo de muestreo. Entonces podemos representar el integrador de la siguiente forma (10.3). Ahora procedemos a resolver la ecuación en diferencias ( ) ( ). (10.4).
(65) 65. ( )(. ). ( ). (. (10.5). ). Aplicamos transformada inversa. ( ). (. ( ). , ( ). ). , ( ). (. )-. (. (. )-. (10.6). ). (10.7). Ahora generamos el diagrama de bloques. Ki.Ts/2. Entrada. Z. + +. + +. Figura 60: Diagrama de bloques de integrador. Ahora generamos el diagrama de flujo. Habilitar. Esta habilitado. no. Suma = (Entrada + retraso entrada) * (Ki.TS/2) Salida =suma + salida Generar retraso dependiendo de Ts. Figura 61: Diagrama de flujo de integrador. Reiniciar Contador y variables.
(66) 66. Ya teniendo el diagrama del controlador ahora podemos generar el diagrama general de funcionamiento.. Figura 62: Diagrama general de integrador.
(67) 67. Con esto podemos ver las entrada y salidas del sistema . Habilitar: Esta variable define si está habilitado funcione y reinicia el programa permite un mayor asequibilidad para aplicaciones.. . Entrada: Señal o estímulo a generar ganancia, por lo general es el error o la salida de proceso.. . Propiedades_proporcional : El cual es un tipo de variable que contiene los datos que queremos modificar del sistema. Los datos de propiedades son relacionados de la siguiente manera . Ganancia integral: Valor de la ganacia Ki. . Periodo de muestreo: Define el periodo de muestreo , la ganancia general y retardo en la función de transferencia. . Valor máximo entrada: Limitar la entrada del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento.. . . Valor minimo Entradas: Limitar la entrada del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento.. . Valor máximo salida : Limitar la salida del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento del actuador del proceso. . Valor minimo salida : Limitar la salida del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento del actuador del proceso. Los datos de salida son los datos que queremos obtener de la rutina. . Salida: La señal de estímulo que queremos representar.. Donde el archivo de propiedades en Rslogix se genera de la siguiente manera.
(68) 68. Figura 63: Archivo de propiedades de Integral generado por Rockwell. Ahora generamos el bloque sobre la descripción del diagrama de flujo el cual que da la siguiente manera. Para realizar sobre programación por función de bloques. Figura 64: Bloque de integral. Para realizar programación por Ladder.
(69) 69. Figura 65: Ladder de integral. O para realizar programación por texto estructurado INTEGRAL(INTEGRAL,habilitar,entrada,salida,propiedades); 7.4 Acción derivativa. La entrada derivativa está dada por. (11.1). ( ). El método de discretizacion que vamos a utilizar es el método bilineal de Tustin de esta forma tenemos la siguiente relación (11.2). Donde Ts es el periodo de muestreo. Primero definimos la transformada del filtro el cual se establece del siguiente modo.. .. ( ). (. /. ) (. (11.3) ). Ahora con esto definimos el derivador completo ( Si reducimos la ecuación tenemos. ( ). ) (. (11.4) ).
(70) 70. (. ). (11.5). . / Ahora procedemos a resolver la ecuación en diferencias ( ) ( ) ( ) . /. (11.6). Despejamos los términos ( )[. (. ). ]. ( ). (. )-. [(. ). (11.7). ). Aplicamos transformada z inversa ( ). , ( ). (. (. )]. (11.8). Ahora generamos el diagrama de bloques. Z. + -. + -. Ts -2.N /Ts +2.N. 2.Kd/(2.N + Ts). Entrada. Figura 66: Diagrama de bloques de derivador. Ahora generamos el diagrama de flujo.
(71) 71. Habilitar. Esta habilitado. no. Reiniciar Contador y variables. Suma = (Entrada - retraso entrada) * (Kd.2/(2.N+Ts)) Salida =suma – (salida * (Ts -2.N /Ts +2N) Generar retraso dependiendo de Ts. Figura 67: Diagrama de flujo de derivador. Ya teniendo el diagrama del controlador ahora podemos generar el diagrama general de funcionamiento..
(72) 72. Figura 68: Diagrama general de derivador.
(73) 73. Con esto podemos ver las entrada y salidas del sistema . Habilitar: Esta variable define si está habilitado funcione y reinicia el programa permite un mayor asequibilidad para aplicaciones.. . Entrada: Señal o estímulo a generar ganancia, por lo general es el error o la salida de proceso.. . Propiedades_proporcional : El cual es un tipo de variable que contiene los datos que queremos modificar del sistema. Los datos de propiedades son relacionados de la siguiente manera . Ganancia integral: Valor de la ganacia Kd. . Polo del filtro : El valor del polo del filtró N que está comprendido entre 1<N<33. . Periodo de muestreo: Define el periodo de muestreo, la ganancia general y retardo en la función de transferencia. . Valor máximo entrada: Limitar la entrada del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento.. . . Valor minimo Entradas: Limitar la entrada del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento.. . Valor máximo salida : Limitar la salida del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento del actuador del proceso. . Valor minimo salida : Limitar la salida del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento del actuador del proceso. Los datos de salida son los datos que queremos obtener de la rutina. . Salida: La señal de estímulo que queremos representar..
(74) 74. Donde el archivo de propiedades en Rslogix se genera de la siguiente manera. Figura 69: Archivo de propiedades derivador generado por Rockwell. Para realizar sobre programación por función de bloques. Figura 70: Bloque derivador. Para realizar programación por Ladder.
(75) 75. Figura 71: Ladder de derivador. O para realizar programación por texto estructurado DERIVADOR(DERIVADOR,habilitar,entrada,salida,propiedades);.
(76) 76. Controlador PID de Rockwell Con el concepto de las acciones básicas de control ya podemos generar un controlador PID en paralelo para plataforma de Rslogix , se debe tener en cuenta de que el formato de este controlador es sobre el método de Tustin Bilineal ,pero esto puede servir de base para la creación otros modelos de controladores PID con entradas dependientes e independientes ,otros modelos de discretización y filtros de un orden superior que pueden ser realizados con la metodología de programación.[25][26][27] 8.1 Controlador PID para Rockwell El esquema básico de un proceso que se quiera controlar con PID es de la siguiente forma.. Proporcional. U(n). CV. e(n) Integrador. PV. Proceso. Derivador. Figura 72: Diagrama de bloques de PID. Pero podemos realizar la siguiente modificación para que sea aún más genérico.
(77) 77 Entrada proporcional Proporcional. U(n). CV. e(n) Integrador. Entrada Derivativa Derivador. Figura 73: Diagrama de bloque Pid con multiples entradas. Donde la entrada proporcional está dada de ocho formas 1. 2. 3. 4. 5. 6. 7. 8. 9.. u(n) – PV o e(n) PV –u(n) o –e(n) u(n) CV PV u(n) – CV CV –u(n) PV – CV CV –PV. Donde la entrada derivativa está dada por 1. 2. 3. 4. 5. 6. 7. 8. 9.. u(n) – PV o e(n) PV –u(n) o –e(n) u(n) CV PV u(n) – CV CV –u(n) PV – CV CV –PV. PV. Proceso.
(78) 78. Ahora generamos el diagrama de clases.. PROPORCIONAL. + HABILITAR : BOOLEAN +GANANCIA PROPORCIONAL ; REAL +MINIMA ENTRADA ; REAL +MAXIMA ENTRADA ;REAL +MINIMA SALIDA ; REAL +MAXIMA SALIDA ;REAL + ENTRADA ; REAL +SALIDA;REAL. INTERGAL. DERRIVADOR. + HABILITAR : BOOLEAN +GANANCIA INTEGRAL ; REAL +MINIMA ENTRADA ; REAL +MAXIMA ENTRADA ;REAL +MINIMA SALIDA ; REAL +MAXIMA SALIDA ;REAL +PERIODO MUESTREO :DINT +POLO FILTRO ; REAL + ENTRADA ; REAL +SALIDA;REAL. + HABILITAR : BOOLEAN +GANANCIA INTEGRAL ; REAL +MINIMA ENTRADA ; REAL +MAXIMA ENTRADA ;REAL +MINIMA SALIDA ; REAL +MAXIMA SALIDA ;REAL +PERIODO MUESTREO :DINT + ENTRADA ; REAL +SALIDA;REAL. PID. + HABILITAR : BOOLEAN + ENTRADA PROPORCIONAL +ENTRADA DERIVATIVA +MINIMA ENTRADA ; REAL +MAXIMA ENTRADA ;REAL +MINIMA REFERENCIA ; REAL +MAXIMA REFERENCIA ;REAL +MINIMA SALIDA ; REAL +MAXIMA SALIDA ;REAL + ENTRADA ; REAL +SALIDA;REAL. Figura 74: Diagrama de clases de controlador PID.
(79) 79. Con estos datos podemos hacer un esquema general de proceso ENTRADA = MAXIMO. HABILITAR. HABILITO?. ENTRADA. ENTRADA > MAXIMO. Reiniciar Contador y variables ENTRADA < MINIMO. ENTRADA = MINIMO. REFERENCIA = MAXIMO. REFERENCIA. REFERENCIA > MAXIMO. REFERENCIA < MINIMO. REFERENCIA = MINIMO. Figura 75: Diagrama general de entrada del bloque PID. ERROR.
(80) 80. SALIDA = MAXIMO ENTRADA PROPORCIONAL. PROPORCIONAL. SALIDA > MAXIMO. ERROR. INTEGRAL. SALIDA < MINIMO ENTRADA DERIVATIVA. DERIVADOR. SALIDA = MINIMO. Figura 76: Diagrama general de salida del bloque PID. Con esto podemos ver las entrada y salidas del sistema . Habilitar: Esta variable define si está habilitado funcione y reinicia el programa permite un mayor asequibilidad para aplicaciones.. . Entrada: Señal o estímulo a generar ganancia, por lo general es el error o la salida de proceso.. . Propiedades_PID : El cual es un tipo de variable que contiene los datos que queremos modificar del sistema. Los datos de propiedades son relacionados de la siguiente manera . Ganancia proporcional: Valor de la ganacia Kp.. . Ganancia integral: Valor de la ganacia Ki.. . Ganancia Derivativa: Valor de la ganacia Kd..
(81) 81. . Valor máximo entrada: Limitar la entrada del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento.. . Valor minimo Entradas: Limitar la entrada del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento.. . Valor máximo salida : Limitar la salida del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento del actuador del proceso. . Valor minimo salida : Limitar la salida del controlador por motivos de aplicación dependiendo del hadware del PLC tiene unos límites de funcionamiento del actuador del proceso. Los datos de salida son los datos que queremos obtener de la rutina. . Salida: La señal de estímulo que queremos representar.. . . Polo del filtro : El valor del polo del fltro N que está comprendido entre 1<N<33. . Periodo de muestreo: Define el periodo de muestreo, la ganancia general y retardo en la función de transferencia. 8.2 Análisis de PID y polos Si analizamos el siguiente diagrama, con el PID planteado en el fascículo 8.1 podemos hallar el valor de los polos..
(82) 82. Proporcional. CV. e(n). U(n). PV. Integrador. Proceso. Derivador. Figura 77: Diagrama de bloques PID. Para facilitar la resolución renombramos las constantes de la siguiente manera (12.1). Y aplicamos dizcretizacion al PID del siguiente modo ( ) ( ). (. ). (. (. ). .. /. (12.2) ). Si sustituimos la ecuación (12.1) en la ecuación (12.2) tenemos ( ) ( ). (. ). (. (. ). ). (12.3). Se puede ver que un sistema con estas características está dado por ( ) ( ). (12.4). Donde los polos del sistema están representados por (. )(. ). (. ). (12.5).
(83) 83. Y los ceros del sistema están dados por la ecuación cuadrática √. (12.6). Remplazamos la ecuación (12.3) para que quede de la forma que está en el (12.4) ( ) ( ) ,. (12.7) -. , (. ) (. ,. -. )(. -. 0. (. ) 1. ). Entonces podemos evidenciar lo siguiente (12.8). (. ). (. ,. ). -. (12.9). ). (12.10). (12.11).
Figure
+7



Documento similar
[r]
En este proyecto se utiliza para la implementaci´ on de la base de datos tanto para los usuarios del sistema como para los dispositivos asociados a dichos usuarios.. Adem´ as,
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
o Si dispone en su establecimiento de alguna silla de ruedas Jazz S50 o 708D cuyo nº de serie figura en el anexo 1 de esta nota informativa, consulte la nota de aviso de la
El objetivo de este escenario, es configurar una sesión BGP entre dos routers de diferente sistema autónomo, es decir, diferente ASN, este tipo de sesiones se establecen entre
Volviendo a la jurisprudencia del Tribunal de Justicia, conviene recor- dar que, con el tiempo, este órgano se vio en la necesidad de determinar si los actos de los Estados
[r]
[r]
