E“CUELA “UPERIOR DE INGENIERÍA MECÁNICA Y ELECTRICA UNIDAD PROFE“IONAL ADOLFO LÓPEZ MATEO“
E“TUDIO“ DE FLUJO“ DE POTENCIA, CORTOCIRCUITO Y E“TABILIDAD TRAN“ITORIA, U“ANDO DO“ PROGRAMA“ DE COMPUTADORA
Y COMPARANDO “U“ RE“ULTADO“
TE“I“
QUE PARA OBTENER EL TITULO DE
INGENIERO ELECTRICI“TA
PRE“ENTAN:
ELIODT JAVIER CAMACHO “ANTIAGO
JUAN CARLO“ VEGA MENDOZA
A“E“ORE“:
ING. EVARI“TO VELÁZQUEZ CAZARE“
ING. RUBÉN DE JE“Ú“ NAVARRO BU“TO“
2
RESUMEN
La energía eléctrica es una de las formas más sencillas de la energía, de las que a mayores distancias es posible transportarla. Se puede obtener de una diversa variedad de fuentes primarias de energía, y es la que más usos, y aplicaciones ofrece en la vida cotidiana.
Sin embargo para que se cumpla lo anterior es indispensable disponer un sistema interconectado mediante el cual sea posible generar la energía, transportarla y distribuirla a todos los usuarios en forma eficaz, segura y con calidad. A este sistema lo llamamos SISTEMA ELECTRICO DE POTENCIA (S.E.P.). En este sistema la energía eléctrica, desde su generación hasta su entrega en los puntos de consumo, pasa por diferentes etapas de adaptación, transformación y maniobra.
Para la correcta operación del sistema son necesarios equipos que sean capaces de transformar, regular, maniobrar y proteger.
Para ayudar al ingeniero en esta planeación de los sistemas de potencia, se usan computadoras digitales y programas fuertemente desarrollados. Estos programas incluyen los de flujos de potencia, estabilidad, corrientes de falla y regímenes transitorios.
Con los programas de flujos de potencia se calculan las magnitudes de las tensiones, los ángulos de fase y los flujos de potencia en las líneas de transmisión para una red, para condiciones de operación de estado estacionario. También se dispone de programas interactivos para flujos de potencia, mediante los cuales los resultados de flujos se despliegan sobre las pantallas de las computadoras en forma de diagramas unifilares.
3
Los programas de estabilidad se usan para estudiar los sistemas de potencia bajo condiciones de perturbación, con el fin de determinar si los generadores y motores síncronos permanecen en sincronismo. Las perturbaciones en el sistema son causadas por la pérdida repentina de un generador o de una línea de transmisión, por aumentos o disminuciones súbitos en la carga y por corto circuitos y operaciones de conexión/desconexión de elementos.
4
AGRADECIMIENTOS
Gracias a mis padres, por haberme apoyado siempre, por tantas noches de desvelo y tanto sacrificio para que cada día de mi trayectoria escolar estuviera sentado en una butaca tomando clases, por sus sabios consejos, por enseñarme a creer en mí, por el cariño y amor que me han brindado siempre, a mi hermano por compartir conmigo cada día, por apoyarme de igual forma y escucharme cuando lo necesitaba, a mis abuelos por darme su apoyo incondicional y animarme siempre a seguir adelante, a mis profesores por llevarme de la mano al camino del conocimiento, en especial al Ing. Evaristo Velázquez Cazarez por su paciencia, dedicación y apoyo en la realización de este proyecto, por sus consejos y ser paciencia al resolver mis dudas, a mis amigos por su apoyo y consejos durante mi carrera, al Instituto Politécnico Nacional por ser mi alma mater y darme la oportunidad de creer como persona, a dios por permitirme cumplir mis metas y despertar cada día con la intención de conocer algo nuevo y permitir darme cuenta que soy muy pequeño ante un universo de conocimiento, pero que sin embargo mientras exista humildad y anhelos poder seguir adelante.
5
No me queda más que agradecer a Dios por permitirme tener a todas las personas que a continuación mencionaré, los cuales siempre estarán en mi mente y corazón, donde sus valores y consejos, suenan y resonaran siempre en cada decisión de mi vida.
A mis padres (Javier Camacho Guerra y Silvia Santiago López) por a ver estado en cada momento de vida, por el sacrificio que con amor hicieron y siguen realizando para que mis hermanos y yo, tengamos estos momentos de dicha y gozo. Este tipo de sacrificios estoy seguro que nunca se los podre pagar, pero serán mi ejemplo para cuando me toque estar en su lugar.
A mis abuelitos paternos y maternos, por cada consejo que me dieron y los valores que me transmitieron, estoy seguro que nunca dejare de ser el nieto que formaron.
A mis tíos: Luis Camacho Guerra, Ángeles Camacho Guerra y Rosa Santiago López, que siempre estuvieron al pendiente de mí, como un hijo más, su apoyo incondicional me servirá de ejemplo como parte personal y profesional.
Al Ing. Evaristo Velázquez Cazares e Ing. Rubén de Jesús Navarro Bustos, por ser unos ingenieros de gran ejemplo de disciplina y que con amor al trabajo se pueden lograr muchas cosas que el dinero no podrá dar, más que el puro amor al conocimiento de aprender y seguir aprendiendo.
La lista de agradecimientos es larga pero cada familiar, amigo que este leyendo este trabajo, gracias por tomarse el tiempo y seguramente forman parte especial de mi vida.
6
ÍNDICE PÁG.
CAPÍTULO I. INTRODUCCIÓN ... 10
1.1 OBJETIVO: ... 10
1.2 ANTECEDENTES: ... 10
1.3 JUSTIFICACIÓN: ... 11
1.4 PLANTEAMIENTO DEL PROBLEMA: ... 12
1.5 ALCANCE: ... 13
CAPÍTULO II. FLUJOS DE POTENCIA ... 15
CONTROL DE FLUJOS DE POTENCIA ... 16
2.1 EL PROBLEMA DE FLUJO DE POTENCIA ... 16
2.2 CANTIDADES POR UNIDAD ... 18
2.2.1 CAMBIO DE BASE DE CANTIDADES POR UNIDAD ... 22
2.2.2 VENTAJAS DE LOS CALCULOS EN POR UNIDAD ... 22
2.3 SOLUCIONES DIRECTAS DE ECUACIONES ALGEBRAICAS LINEALES: ELIMINACIÓN DE GAUSS ... 24
2.4 SOLUCIONES ITERATIVAS DE ECUACIONES ALGEBRAICAS LINEALES: JACOBI Y GAUSS-SEIDEL... 27
2.5 SOLUCIONES ITERATIVAS DE ECUACIONES ALGEBRAICAS NO LINEALES: NEWTON-RAPHSON... 29
2.6 SOLUCIÓN DE FLUJOS DE POTENCIA MEDIANTE EL MÉTODO DE GAUSS-SEIDEL ... 31
2.7 SOLUCIÓN DE FLUJOS DE POTENCIA POR EL MÉTODO DE NEWTON-RAPHSON 33 2.8 TÉCNICAS DE DISPERSIDAD ... 37
2.9 FLUJOS DE POTENCIA POR EL MÉTODO DESACOPLADO RÁPIDO... 40
2.10 POTENCIA COMPLEJA ... 41
2.10.1TRIANGULO DE POTENCIA ... 41
2.10.2 DIRECCION DE FLUJO DE POTENCIA ... 42
CAPITULO III. CORTO CIRCUITO/FALLAS SIMETRICAS ... 46
3.1 CORTO CIRCUITO TRIFASICO: MÁQUINA SINCRONA SIN CARGA ... 46
3.2 CORTO CIRCUITOS TRIFASICOS EN SISTEMAS DE POTENCIA ... 48
3.3 COMPONENTES SIMETRICAS ... 49
3.3.1 OPERADORES: ... 51
7
3.3.3 POTENCIA EN FUNCION DE LAS COMPONENTES SIMETRICAS ... 55
3.4 REDES DE SECUENCIA ... 57
3.4.1 POSITIVA Y NEGATIVA ... 57
3.4.2 REDES DE SECUENCIA CERO ... 58
3.4.3 REGLAS Y RESTRICCIONES ... 58
3.4.4 TRANSFORMADORES ... 61
3.4.5 LÍNEAS AÉREAS ... 62
3.5 PRESENTACIÓN DEL SISTEMA. ... 64
3.5.1 FALLA SIMPLE LÍNEA A TIERRA ... 66
3.5.2 FALLA DE LÍNEA A LÍNEA ... 68
3.5.3 FALLA DE DOBLE LÍNEA A TIERRA ... 70
3.6 MATRIZ DE IMPEDANCIA DE BUS/barra... 72
3.7 MATRICES DE IMPEDANCIAS DE SECUENCIA DE BUS/barra ... 74
CAPÍTULO IV. ESTABLIDAD TRANSITORIA ... 78
4.1 ESTUDIOS DE ESTABILIDAD ... 78
4.2 EL PROBLEMA DE LA ESTABILIDAD ... 80
4.2.1 “ESTADO ESTABδE Y ESTADO DINÁεICO” ... 80
4.3 ESTABLECIMIENTO DEL PROBLEMA ... 81
4.4 CLASIFICACION DE LOS ESTUDIOS DE ESTABILIDAD... 82
4.4.1 METODOS DE SOLUCION ... 83
4.5 ESTABILIDAD TRANSITORIA ... 84
4.6 ECUACION DE OSCILACIÓN ... 85
4.7 MODELO DE MÁQUINA SINCRONA SIMPLIFICADO Y EQUIVALENTES DEL SISTEMA ... 87
4.8 CRITERIO DE LAS ÁREAS IGUALES ... 89
4.9 INTEGRACIÓN DE LA ECUACIÓN DE OSCILACIÓN ... 92
4.10 ESTABILIDAD DE VARIAS MAQUINAS... 95
4.11 MÉTODOS DE DISEÑO PARA MEJORAR LA ESTABILIDAD TRANSITORIA...100
CAPITULO V. DESARROLLO DEL S.E.P. É INTRODUCCIÓN DE PROGRAMAS ...102
5.1 DISEÑO DEL SISTEMA ELECTRICO DE POTENCIA EN PROGRAMAS DE COMPUTADORA ...103
8
5.3 ESTUDIO DE CORTO CIRCUITO (CORRIENTES DE FALLA) EN PROGRAMAS DE
COMPUTADORA ...126
5.4 ESTUDIO DE ESTABILIDAD TRANSITORIA, EN PROGRAMAS DE COMPUTADORA ...133
CAPITULO VI. CONCLUSIONES Y RECOMENDACIONES ...147
6.1 ANALISIS DE RESULTADOS PROGRAMAS...147
6.2 CONTRUCCION DEL SISTEMA ELECTRICO DE POTENCIA. ...148
6.3 SIMULACIÓN DE FLUJOS DE POTENCIA ...151
6.4 SIMULACION DE CORRIENTES DE FALLA. ...152
6.5 SIMULACION ESTABILIDAD TRANSITORIA ...152
NOMENCLATURA ...154
ÍNDICE DE ILUSTRACIONES ...156
ÍNDICE DE TABLAS ...160
BIBLIOGRAFÍA ...160
10
CAPÍTULO I. INTRODUCCIÓN
1.1
OBJETIVO:
Conocer y aplicar los estudios de Flujos de Potencia, corrientes de falla y Estabilidad Transitoria, para el análisis y diseño de un Sistema Eléctrico de Potencia, mediante programas computacionales.
1.2 ANTECEDENTES:
Las redes eléctricas toman un papel importante en la distribución de la energía eléctrica en nuestro país y alrededor del mundo, de su óptimo funcionamiento depende la continuidad en el servicio y el desarrollo a nivel industrial, empresarial y local en las casa habitación, ya que muchas máquinas y aparatos funcionan con corriente alterna, existen factores que pueden alterar el buen funcionamiento de las redes, tales como descargas atmosféricas, fallas en los generadores, corrientes de falla etc., mismas que en la actualidad gracias al desarrollo de los algoritmos y programas computacionales podemos simular y estimar la magnitud de las fallas para así prevenirlas con el uso adecuado de dispositivos de protección como relevadores.
11
1.3 JUSTIFICACIÓN:
A medida que el tamaño de las compañías eléctricas ha aumentado y se ha incrementado el número de interconexiones, la planeación de la expansión futura se vuelve cada vez más compleja. El crecimiento y las modificaciones ha hecho que las compañías consideren una gama de posibilidades de diseño y realicen estudios detallados de los efectos sobre el sistema de cada alternativa, con base en varias suposiciones: condiciones normales y anormales de operación, cargas punta y fuera de punta. También deben reunirse y manejarse con exactitud un gran número de datos de las redes.
Los ingenieros electricistas se ocupan de cada paso del proceso de generación, transmisión, distribución y utilización de la energía eléctrica. Es probable que la industria eléctrica sea la más grande y compleja del mundo. El ingeniero electricista que trabaje en esa industria encontrara problemas retadores al diseñar futuros sistemas de potencia para suministrar cantidades elevadas de energía eléctrica de manera segura, continua y económica.
12
1.4 PLANTEAMIENTO DEL PROBLEMA:
El sistema eléctrico debe cumplir con la tarea de generar energía eléctrica en los lugares más idóneos para tal fin, transformar esa electricidad a unas características propias para transportarla grandes distancias, transformarla nuevamente para poder ser distribuida en los centros de consumo y finalmente adaptarla a valores aptos para los usuarios.
Actualmente los sistemas operan con energía eléctrica en forma de corrientes alternas trifásicas, esto debido a su facilidad para transformarse, a comparación con la corriente directa. A parte de que requieren menores niveles de aislamiento que la corriente directa, lo que implica ahorro en aislamiento y en general equipos menos brumosos. Otra razón para el uso de corrientes alternas trifásicas es la simplicidad de los generadores y transformadores que trabajan con este tipo de corrientes, así mismo resulta también más sencilla y económica la transmisión y la distribución de este tipo de corrientes.
13
1.5 ALCANCE:
15
CAPÍTULO II. FLUJOS DE POTENCIA
Para tener una correcta operación de los sistemas de potencia en condiciones normales balanceadas de estado estable trifásico, se requiere lo siguiente:
1. La generación abastece la demanda.
2. Las magnitudes de tensión en las barras permanecen cercanas a sus valores
nominales.
3. Los generadores operan dentro de límites especificados de potencia real.
4. Las líneas de transmisión y los transformadores no están sobrecargados.
Los primeros algoritmos de solución se basan en el método de Gauss-Seidel, que hizo posible, por primera vez, resolver el problema de flujo de carga para sistemas relativamente grandes. Sin embargo, adolecía de relativamente malas características de convergencia. Luego se desarrollo el algoritmo de Newton para mejorar la convergencia del método de Gauss-Seidel, pero al principio se pensó que era impráctico para sistemas de dimensiones reales debido a los problemas de cálculo con redes grandes. El problema subyacente para el método iterativo de Newton es la solución de una ecuación matricial de gran dimensión. La matriz por ser muy grande, era también muy dispersa. Esta observación dio lugar al desarrollo de los métodos de dispersidad. El concepto hizo posible aplicar el método Newton a sistemas de tamaño arbitrario, para obtener por primera vez, tanto velocidad como características excelentes de convergencia. A continuación se numeran las soluciones antes descritas y como se conocen actualmente para la solución de flujos de potencia:
1) Soluciones directas de ecuaciones algebraicas lineales: eliminación de Gauss.
2) Soluciones iterativas de ecuaciones algebraicas lineales: Jacobi y Gauss-Seidel
3) Soluciones iterativas de ecuaciones algebraicas no lineales: Newton-Raphson
4) Solución de flujos de potencia mediante el método Gauss-Seidel
5) Solución de flujos de potencia por el método de Newton-Raphson
16
CONTROL DE FLUJOS DE POTENCIA
Los siguientes medios de utilizan para controlar los flujos de potencia del sistema:
1. Control del primo motor y de excitación de generadores.
2. Conexión de los bancos de capacitores, reactores y sistemas estáticos de VAr.
3. Control de transformadores de regulación y con cambiador de derivaciones.
2.1 EL PROBLEMA DE FLUJO DE POTENCIA
El problema de flujo de potencia es calcular la magnitud de tensión y el ángulo de fase en cada bus/barra de un sistema de potencia en condiciones de estado estable trifásico. Como subproducto de este cálculo, se pueden calcular flujos de potencia real y reactiva en equipo como líneas de transmisión y transformadores, así como pérdidas de equipo.
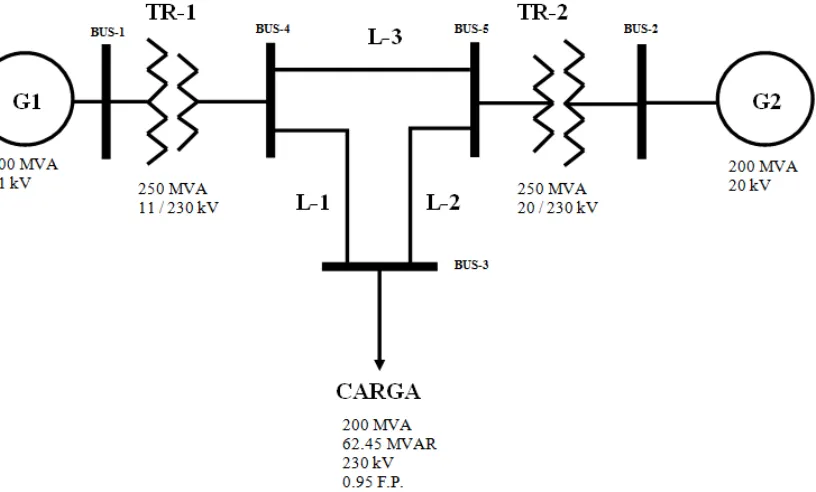
El punto de partida para un problema de flujo de potencia es un diagrama unifilar del sistema de potencia, a partir del cual se pueden obtener los datos de entrada para las soluciones por computadora. Los datos de entrada consisten en datos de buses/barras, datos de las líneas de transmisión y de los transformadores.
FIGURA 2.1 Comportamiento de potencia activa y real, en tipo generación y carga.
Las cuatro variantes siguientes están asociadas con cada bus/barra k: magnitud de tensión
, angulo de fase , potencia neta real y potencia activa abastecida al bus/barra.
17
son incógnitas que se calcularan mediante algún programa, dicho programa puede calcular y entregar las 4 variables. Por conveniencia, la potencia entregada al bus/barra k se separa en generación y carga.
Es decir:
Cada bus/barra k se clasifica en uno de los tres tipos siguientes:
1. Bus/barra compensador: Solo hay un bus/barra compensador, que por conveniencia
en este texto se le asigna el numero 1. El bus/barra compensador es una referencia para la cual , por lo común 1.0 por unidad, es un dato de entrada. Los programas de flujo de potencia calcula P1 y Q1.
2. Bus/barra de carga: y son datos de entrada. Los programas de flujo de
potencia calcula y . La mayor parte de los buses/barras en un programa
normal de flujo de potencia son de carga.
3. Bus/barra de tensión controlado: y son datos de entrada. El programa de flujo
de potencia calcula y . Como ejemplo están los buses/barras a los que están
conectados los generadores, capacitores en derivación desconectables, o sistemas
compensadores estáticos VARs. Los límites de VARs máximo y mínimo y
que este equipo puede suministrar son también datos de entrada. Otro
ejemplo es un bus/barras al que está conectado un transformador con cambiador de derivaciones; el programa de flujo de potencia calcula entonces la posición del cambiador.
Hay que observar que cuando el bus/barras k en un bus/barra de carga sin ninguna
generación, es negativo; es decir que la potencia real suministrada al bus/barra
18
Las líneas de transmisión están representadas por el circuito π equivalente. Los
transformadores también se representan por circuitos equivalentes, para un transformador de dos devanados.
δos datos de entrada para cada línea de transmisión son la impedancia serie Z’ y la admitancia de derivación Y’ del circuito π equivalente por unidad, los dos buses/barras a los que está conectada la línea y la capacidad máxima en MVA. De manera similar, los datos de entrada para cada transformador son las impedancias de devanados por unidad Z, la admitancia de la rama de excitación por unidad Y, los buses/barras a los que están conectados los devanados y las capacidades máximas en MVA. Los datos de entrada para los transformadores con cambiador de derivación incluyen también las posiciones máximas del cambiador.
La matriz de admitancia de bus/barra se puede construir a partir de los datos de
entrada de transformadores y líneas. Los elementos de son:
Elementos de la diagonal: suma de las admitancias conectadas al bus/barra k
Elementos fuera de la diagonal (suma de admitancias conectadas a los
buses/barras k y n)
2.2 CANTIDADES POR UNIDAD
19
sobre el método por ciento y es que el producto de dos magnitudes expresadas por unidad, vienen, a su vez, expresado por unidad, en tanto que el producto de dos magnitudes en por ciento, tiene que dividirse por 100 para obtener el resultado en por ciento.
Las tensiones, corrientes, potencias y reactancias, están relacionadas entre sí, de tal forma que la elección de valores base para dos cualesquiera determinar los valores base de las otras dos. Si se especifican los valores básicos de la corriente y la tensión, son determinados: la impedancia base y las potencias base. La impedancia base es aquella que da lugar, a lo largo de ella, a una caída de tensión igual a la tensión base, cuando la corriente que circula por dicha impedancia sea igual valor básico de la corriente. Las potencias base, en sistemas monofásicos, son el producto de la tensión base en kV por la corriente base en amperes. Normalmente, las magnitudes elegidas para seleccionar la base son los kVA y la tensión de kV. En sistemas monofásicos o en sistemas trifásicos en los que el término “corriente” se refiere a la corriente de línea, el término tensión se refiere a la tensión, respecto al neutro y las potencias son en kVA por fase, relacionándose las diversas magnitudes por las formulas siguientes:
(2.2.1)
(2.2.2)
(2.2.3)
(2.2.4)
Potencia base en
Potencia base en
20
En estas ecuaciones los subíndices y LN indican “por fase” y “líneas a neutro”
respectivamente, donde las ecuaciones se apliquen a circuitos trifásicos. Si las ecuaciones se emplean para un circuito monofásico, significa el tensión a través de la línea monofásica o línea a tierra si un lado de la línea esta a tierra.
Como los circuitos trifásicos se resuelven como una línea simple con neutro, las bases para las magnitudes del diagrama de impedancias son kVA por fase y kV de línea a neutro. Los datos se dan normalmente como kVA totales trifásicos o MVA y kV entre líneas. A causa de esta costumbre de especificar la tensión de línea y los kVA o MVA totales, puede originarse una confusión sobre la relación existente entre el valor por unidad de la tensión de línea y el valor por unidad de la tensión fase. Como base de una tensión de línea, la tensión en el circuito monofásico, necesitara para la resolución, es la tensión respecto al neutro. La tensión básica, respecto al neutro, es la tensión básica entre líneas dividida por
. Dado que este es también el valor de la relación entre las tensiones de línea y respecto
al neutro en un sistema trifásico equilibrado, el valor por unidad de una tensión de línea a neutro, con tensión base de línea a neutro, es igual al valor por unidad de la tensión de línea en el mismo punto, con tensión base de línea, si el sistema está equilibrado. De igual forma, los kVA trifásicos son tres veces lo kVA por fase y los kVA base trifásica son tres veces los kVA base por fase. Por tanto, el valor por unidad de los kVA, con kVA trifásicos base, es idéntico al valor por unidad de los kVA por fase con kVA por fase básicos.
Un ejemplo para comprender lo mencionado es lo siguiente:
Donde los subíndices y δδ significan “trifásico” y “línea a línea” respectivamente:
Y
21
Para una tensión de línea a línea de 108 kV, la tensión línea a neutro es
, y por lo cual:
Para la potencia trifásica total de 18,000 kW, la potencia por fase es 6,000 kW, y por lo tanto:
En el análisis anterior descrito, se pueden sustituir los valores en Megawatts y en Megavolamperes por los correspondientes en kilowatts y en kilovoltamperes. A menos que algo diferente se especifique, un valor dado de tensión base en un sistema trifásico es una tensión línea a línea, y un valor dado de kilovoltamperes o megavoltamperes base es el valor trifásico total.
La impedancia base y la corriente base se pueden calcular directamente desde valores trifásicos de los kilovolts y kilovoltamperes base. Si se interpretan los kilovoltamperes base y la tensión base en kilovolts como los kilovoltamperes totales de las tres fases y la tensión base de línea a línea, se encuentra que
(2.2.6)
Y de la ecuación
(2.2.7)
(2.2.8)
22
2.2.1 CAMBIO DE BASE DE CANTIDADES POR UNIDAD
En algunas ocasiones, la impedancia en por unidad de un componente del sistema se expresa sobre una base diferente de la seleccionada en el lugar donde la componente se localiza. Es necesario contar con medios para convertir las impedancias en por unidad de una base a otra, debido a que al hacer cálculos, todas las impedancias de un sistema se deben expresar sobre la misma impedancia base. Al sustituir la expresión para la impedancia base de la ecuación 2.2.8 en la ecuación 2.2.5 se tiene, para cualquier elemento del circuito que:
(2.2.10)
Lo cual muestra que la impedancia por unidad es directamente proporcional los kilovoltamperes base e inversamente proporcional al cuadrado de la tensión base. Por lo tanto, para cambiar la impedancia en por unidad sobre una base dada a impedancia en por unidad sobre una nueva base, se aplica la siguiente ecuación:
(2.2.11)
2.2.2 VENTAJAS DE LOS CALCULOS EN POR UNIDAD
23
Se deben de seguir los siguientes puntos:
1. Se eligen los kV y kA base en una parte del sistema. Se entiende que los valores
base para los sistemas trifásicos son los kV línea a línea y los kilo o megavoltamperes trifásicos.
2. Para otras partes del sistema, esto es, para los otros lados del transformador, se determinan los kilovolts base de cada parte de acuerdo con las relaciones de las tensiones de línea a línea de los trasformadores. Los kVA base serán los mismos en todo el sistema. Es de ayuda señalar los diferentes kV base de cada parte del sistema sobre el diagrama unifilar.
3. Generalmente, la información disponible sobre la impedancia de los
transformadores trifásicos esta en por unidad o por ciento sobre la base de sus valores nominales.
4. Para tres transformadores monofásicos conectados como una unidad trifásica, los
valores nominales trifásicos se determinan de los nominales monofásicos de cada transformador. La impedancia en por ciento de unidad trifásica es la misma que la de los transformadores individuales.
5. Se debe cambiar, mediante la ecuación 2.2.11, la impedancia en por unidad de un
elemento que se encuentra en una parte del sistema que tiene bases diferentes a las que se han seleccionado.
Hacer cálculos para los sistemas eléctricos en términos de valores en por unidad simplifica el trabajo en gran medida. La apreciación real del valor que tiene el método en por unidad viene con la práctica. Algunas de las ventajas del método se resumen brevemente a continuación:
1. Los fabricantes especifican la impedancia de una pieza de equipo en por ciento o en
por unidad sobre la base de los valores de placa nominales.
2. Las impedancias en por unidad de máquinas del mismo tipo y valores nominales
24
impedancia en por unidad que sea razonablemente correcta. La experiencia al trabajar con valores en por unidad, familiariza con los valores apropiados de impedancia en por unidad para los distintos tipos de equipos.
3. Cuando se especifica la impedancia en ohms en un circuito equivalente, cada
impedancia debe estar referida al mismo circuito multiplicándola por el cuadrado de la relación de las tensiones nominales de cada lado del transformador que conecta al circuito de referencia con el que contiene la impedancia. La impedancia en por unidad (una vez que se expresa sobre la base apropiada) es la misma independientemente del lado del transformador a la que este referida.
4. La manera en que se conectan los transformadores en circuitos trifásicos no afectan
a las impedancias en por unidad del circuito equivalente, aunque la conexión del transformador determine la relación entre las tensiones base en los dos lados del transformador.
2.3 SOLUCIONES DIRECTAS DE ECUACIONES
ALGEBRAICAS LINEALES: ELIMINACIÓN DE GAUSS
Considere el siguiente conjunto de ecuaciones algebraicas lineales en forma matricial
(2.3.1)
O bien,
(2.3.2)
Donde x y y son N vectores y A es una matriz cuadrada de N x N. Los componentes de x, y
y A podrían ser reales o complejos. Dadas A y y, se desea calcular x. Se supone que det(A)
25
La solución x se puede obtener fácilmente cuando A es una matriz triangular superior con
elementos distintos de cero en la diagonal principal. Entonces, la ecuación 2.3.1 tiene la forma:
(2.3.3)
Puesto que la ultima ecuación de 1.3.3, solo tiene que ver con :
(2.3.4)
Después de que se calcula , se puede resolver la penúltima ecuación:
(2.3.5)
En general, con ya calculadas, se puede resolver la siguiente
ecuación:
(2.3.6)
Este procedimiento para resolver la ecuación (2.3.3) se llama sustitución hacia atrás.
Si A no es triangular superior, la ecuación (2.3.1) se puede transformar en una ecuación
equivalente con matriz triangular superior. La transformación, llamada eliminación de Gauss, se describe mediante los (N-1) pasos siguientes. Durante el paso 1, se utiliza la
primera ecuación de 2.3.1 para eliminar a de las demás ecuaciones. Es decir, la ecuación
1 se multiplica por y luego se resta de la ecuación n, para n=2,3,…..N. Después de
26
(2.3.7)
La ecuación 2.3.7 tiene la forma siguiente:
(2.3.8)
Donde el superíndice (1) denota el paso 1 de la eliminación de Gauss.
Durante el paso 2 se utiliza la segunda ecuación en 2.3.8 para eliminar de las demás ecuaciones (tercera, cuarta, quinta, etcétera). Es decir, la ecuación 2 se multiplica
por y se resta de la ecuación n, para n=3,4,…, N. Después del paso 2, se tiene:
27
Durante el paso k, se empieza con . La primera k de estas ecuaciones, ya
triangularizada, se deja sin cambio. También, la ecuación k se multiplica por
y luego se resta de la ecuación n, para n=k+1, k+2,…, N.
Después de (N-1) pasos, se llega a la ecuación equivalente , donde
es triangular superior.
2.4 SOLUCIONES ITERATIVAS DE ECUACIONES
ALGEBRAICAS LINEALES: JACOBI Y GAUSS-SEIDEL
Una solución iterativa general para la ecuación 1.3.1, procede de la siguiente manera. Primero seleccione una suposición inicial x(0). Luego, utilice:
(2.4.1)
Donde x(i) es la i-ésima suposición y es un vector N de funciones que especifican el método de iteración. Se continúa con el procedimiento hasta que se satisfacen las siguientes condiciones de finalización:
para toda k= 1, 2, … , N (2.4.2)
Donde es el k-ésimo componente de x(i) y es un nivel de tolerancia especificado.
Es pertinente preguntarse:
1. ¿El procedimiento de iteración convergerá a la solución única?
2. ¿Cuál es la rapidez de convergencia (cuantas iteraciones se requieren)?
3. Cuando se utiliza una computadora digital, ¿Cuáles son los requerimientos de
almacenamiento y tiempo de computadora?
Estas preguntas se abordan para dos métodos iterativos específicos: Jacobi y Gauss-Seidel. El método de Jacobi se obtiene al considerar la k-ésima ecuación de 2.3.1, como sigue:
28
Despejando :
(2.4.4)
En el método de Jacobi se emplean los valores “viejos” de x(i) en la iteración i en el lado derecho de la ecuación 1.4.4, para generar el valor “nuevo” en el lado izquierdo de la ecuación 1.4.4, es decir:
(2.4.5)
El método de Jacobi dado por la ecuación 1.4.5, también se puede escribir en el siguiente formato matricial:
(2.4.6)
Donde:
(2.4.7)
Y por lo tanto tenemos:
(2.4.8)
Para Jacobi, D consiste en los elementos de la diagonal de la matriz A.
El método de Gauss-Seidel está dado por:
29
El método de Gauss-Seidel es similar a Jacobi excepto porque durante cada iteración los valores “nuevos”.
El método de Gauss-Seidel de la ecuacion 2.4.9, también se puede escribir en forma de matriz de las ecuaciones 2.4.6 y 2.4.7, donde:
(2.4.10)
Para Gauss-Seidel, D en la ecuación 2.4.10, es la porción triangular inferior de A, en tanto
que para Jcobi, D en la ecuación 2.4.8 es la porción diagonal de A.
2.5 SOLUCIONES ITERATIVAS DE ECUACIONES
ALGEBRAICAS NO LINEALES: NEWTON-RAPHSON
Un conjunto de ecuaciones algebraicas no lineales en forma de matriz esta dado por:
(2.5.1)
Donde y y x son N vectores y f(x) es un vector N funciones. Sean y y f(x), y se desea
resolver para x. Los métodos iterativos descritos anteriormente se pueden ampliar a
ecuaciones no lineales como se muestra a continuación, describiendo la ecuación 2.5.1:
(2.5.2)
Sumando Dx a ambos lados de la ecuación 2.5.2, donde D es una matriz cuadrada invertible de N X N:
(2.5.3)
Premultiplicando por :
30
Los valores viejos de x(i) se utilizan en el lado derecho de la ecuación 2.5.4 para generar los nuevos valores x(i+1) en el lado izquierdo. Esto es:
(2.5.5)
Para las ecuaciones lineales, f(x)=Ax y la ecuación 2.5.5 se reduce a:
(2.5.6)
Que es idéntico a los métodos de Jacobi y Guss-Seidel de la ecuación 2.4.6. Para ecuaciones no lineales, se debe especificar la matriz D en la ecuación 2.5.5.
Un método para especificar D, llamado Newton-Raphson, se basa en el siguiente desarrollo en serie de Taylor de f(x) respecto a un punto de operación
(2.5.7)
Haciendo caso omiso de los términos de orden superior en la ecuación 2.5.7 y despejando x:
(2.5.8)
El método de Newton-Raphson sustituye por el valor viejo de x(i) y x por el nuevo valor
x(i+1) en la ecuación 2.5.8. por lo tanto:
(2.5.9)
Donde:
31
La matriz J de NxN, cuyos elementos son las derivadas parciales mostradas en la ecuación 2.5.10, se llama matriz jacobiana. El método de Newton-Raphson es similar al de Gauss-Seidel, excepto porque D en la ecuación 2.5.5 se sustituye por J en la ecuación 2.5.9.
La ecuación 2.5.9 contiene la matriz inversa . En lugar de calcular (2.5.9) se puede
rescribir como se muestra a continuación:
(2.5.11)
donde:
(2.5.12) y
(2.5.13)
Entonces, durante cada iteración, se completan los cuatro pasos siguientes: 1. Calcule Δy(i) de la ecuación (2.5.13).
2. Calcule J(i) de la ecuación (2.5.10).
3. Por medio de la eliminación de Gauss y la sustitución hacia a tras resuelva la
ecuación (2.5.11) para Δx(i).
4. Calcule x(i+1) de la ecuación (2.5.12).
2.6 SOLUCIÓN DE FLUJOS DE POTENCIA MEDIANTE EL
MÉTODO DE GAUSS-SEIDEL
Las ecuaciones nodales son un conjunto de ecuaciones análogas a y=Ax,
resueltas por el método de Gauss-Seidel. Puesto que los datos de los buses o barras de tensión controlada, las ecuaciones nodales no se ajustan directamente al formato de ecuación inicial; el vector I de las fuentes de corrientes es una incógnita y, en realidad, las
ecuaciones son no lineales. Para cada barra de carga, se puede calcular de la ecuación
2.5.5, y se obtiene:
32
Aplicando el método de Gauss-Seidel, ecuación (2.3.9), a las ecuaciones nodales, con el
valor dado arriba de se obtiene:
(2.6.2)
La ecuación 2.6.2 se puede aplicar dos veces durante cada iteración para las barras de
carga; primero se utiliza , y luego se sustituye por en el lado
derecho de la ecuación 2.6.2
Para un bus/barra de tensión controlado, es una incognita, pero se puede calcular de la
ecuación 2.5.11, y se obtiene:
(2.6.3)
También:
Si el valor calculado para no rebasa sus límites, entonces se emplea en la ecuación
2.6.2 para calcular . Luego, la magnitud se
cambia a , que el dato de entrada para el bus/barra de tensión controlado. Por lo tanto, se
utiliza la ecuación 2.6.2 para calcular solo el ángulo para los buses/barras de tensión controlado.
Si el valor calculado excede su límite durante cualquier iteración,
entonces el tipo de bus/barra se cambia de bus/barra de tensión controlado a bus/barra de carga, con fijado en su valor limite. En esta condición, el dispositivo controlador de tensión (banco de capacitores, compensador estático de VARs, etcétera) no es capaz de
mantener a como se especifica mediante los datos de entrada. El programa de flujos de
33
Para el bus/barra compensador, denotado como bus/barra son los datos de
entrada. Como tal, no se necesitan iteraciones para el bus/barra I. Después que converge el proceso de iteración, se puede llevar a cabo un paso por las ecuaciones 2.5.10 y 2.5.11 para
calcular .
2.7 SOLUCIÓN DE FLUJOS DE POTENCIA POR EL
MÉTODO DE NEWTON-RAPHSON
La ecuación 2.5.10 es análoga a la ecuación no lineal y= f(x), resulta que el método
Newton-Raphson. Definimos los vectores x, y y f para el problema de flujos de potencia
como:
(2.7.1)
Donde los términos V, P y Q están en por unidad y los términos están en radianes. Se
omiten las variables del bus/barra compensador en la ecuación 2.7.1, porque ya se
conocen. La ecuación 2.5.10 tiene la forma siguiente:
(2.7.2)
(2.7.3)
34
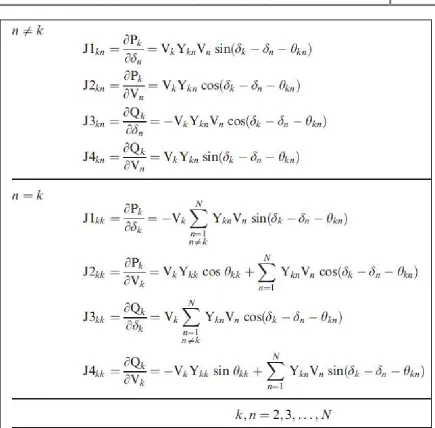
La matriz jacobiana de 2.4.10 tiene la forma:
(2.7.4)
La ecuación 2.7.4 se divide en cuatro bloques. Las derivadas de cada blouqe, obtenidas de las ecuaciones 2.7.2 y 2.7.3, se dan en la tabla 2.1.
Ahora se aplican al problema de flujos de potencia los cuatro pasos del método Newton-Raphson descritos en la sección 2.3, empezando con:
en la i-ésima iteración.
Pasó 1 Utilice las ecuaciones 1.7.2 y 1.7.3, para calcular:
(2.7.5)
Pasó 2 Emplee las ecuaciones de la tabla 2.1 para calcular la matriz jacobiana.
Pasó 3 Por medio de la eliminación de Gauss y la sustitución hacia atrás resuelva:
35
Pasó 4 Calcule:
(2.7.7)
Empezando con el valor inicial x(0), el procedimiento continua hasta que se obtiene la convergencia o hasta que el numero de iteraciones supera un máximo especificado.
Los criterios de convergencia con frecuencia se basan en Δy(i) (llamada desajustes de
potencia) y no en Δy(x) (desajustes de ángulos de fase y magnitudes de tensión).
Para cada bus/barra de tensión controlado, la magnitud ya se conoce, y la función
no es necesaria. Por consiguiente, se podrían omitir del vector x y del vector y.
Asimismo, en la matriz jacobiana se podrían omitir la columna que corresponde a las
derivadas parciales con respecto a y el renglón correspondiente a las derivadas parciales
de . De otra manera, en la matriz jacobiana se podrían retener las filas y las columnas
que corresponden a los buses/barras de tensión controlado. Entonces, durante cada
iteración, la magnitud de tensión de cada bus/barra de tensión controlado se
establece de nuevo en , que es el dato de entrada para ese bus/barra.
Al final de cada iteración se calcula de la ecuación 2.7.3, y
para cada bus/barra de tensión controlada. Si el valor calculado de excede sus límites,
entonces se cambia el tipo de bus/barra a bus/barra de carga con fijado en su valor
36
37
2.8 TÉCNICAS DE DISPERSIDAD
Un sistema de potencia típico tiene un promedio de menos de tres líneas conectadas
a cada bus/barra. Como tal, cada fila de tiene un promedio de menos de cuatro
elementos distintos de cero, uno fuera de la diagonal para cada línea y la diagonal. Se dice
que una matriz que solo tiene algunos elementos distintos de cero es dispersa.
Los programas de flujo de potencia como el de Newton-Raphson utilizan las técnicas de matrices dispersas para reducir los requerimientos de almacenamiento y tiempo de
cómputo. Estas técnicas incluyen el almacenamiento compacto de y J(i) y el
reordenamiento de los buses/barras para evitar la ecuación de nuevos elementos no cero de J(i) durante los pasos de la eliminación de Gauss. Considere la siguiente matriz:
(2.8.1)
Un método para el almacenaje compacto de S consiste en los siguientes cuatro vectores:
DIAG= [1.0 2.0 3.0 4.0] (2.8.2)
OFFDIAG= [-1.1 -2.1 -3.1 -4.1 -5.1 -6.1 -7.1] (2.8.3)
COL= [2 3 4 1 4 1 1] (2.8.4)
ROW= [3 2 1 1] (2.8.5)
DIAG contiene los elementos ordenados de la diagonal y OFFDIAG contiene los
elementos distintos de cero que no pertenecen a la diagonal de S.COL contiene el numero
de columna de cada elemento de COL es 1, lo cual indica que el cuarto OFFDIAG, -4.1,
se localiza en la columna 1. ROW indica el número de elementos fuera de la diagonal
principal en cada fila de S. Por ejemplo, el primer elemento de ROW es 3, lo cual indica
38
elementos de OFFDIAG, -4.1 y -5.1, se localizan en la segunda fila. La matriz S se puede reconstruir por completo a partir de estos cuatro vectores. Observe que la dimensión de DIAG y ROW es igual al número de elementos de la diagonal de S, en tanto que la
dimensión de OFFDIAG y COL es igual el número de elementos fuera de la diagonal
distinto de cero.
Ahora suponga que los requerimientos de almacenamiento de la computadora son 4 bytes
para almacenar cada magnitud y 4 bytes para almacenar cada fase de los elementos de
en un sistema de potencia de N buses/barras. También, suponga que tiene un promedio
de 3N elementos fuera de la diagonal distintos de cero (tres líneas por bus/barra) junto con sus N diagonales. Usando la técnica de almacenamiento compacto anterior, necesitamos (4+4)3N= 24N bytes para OFFDIAG y (4+4)N= 8N para DIAG. Asimismo, suponiendo 2 bytes para almacenar cada entero, se requiere 6N bytes para ROW. La memoria total de computadora requerida es entonces (24+8+6+2)N= 40N bytes con almacenamiento
compacto de , comparada con 8 bytes sin almacenaje compacto. Para un sistema de
potencia de 1000 buses/barras, esto significa 40 en lugar de 8000 kilobytes para almacenar
. Se podría reducir más el almacenaje si se guarda solo la porción triangular superior de
la matriz simétrica .
La matriz jacobiana también es dispersa. De la tabla 2.1, siempre que , . El almacenamiento compacto de J para un sistema de potencia
de 30 000 buses/barras requiere menos de 10 megabytes con las suposiciones anteriores. La otra técnica de dispersidad es reordenar los buses/barras. Suponga que se utiliza la
eliminación Gauss para triangulizar S en la ecuación 2.8.1. Después de un paso en la
eliminación de Gauss, como se describió en la sección 2.3, se tiene:
(2.8.6)
39
Se puede ver que los ceros de las columnas 2, 3, y 4 de S son reemplazados con elementos
distintos de cero en . Se pierde el grado original de dispersidad.
Un método simple de reordenamiento es empezar con los buses/barras que tienen las ramas con menos conexiones y terminar con los que tienen las ramas mas conectadas. Por
ejemplo, S en la ecuación 2.8.1, tiene tres ramas conectadas al bus/barra 1 (tres elementos
fuera de la diagonal en la fila 1), dos ramas conectadas al bus/barra 2 y una rama conectada a los buses/barras 3 y 4. Recordando los buses/barras 4, 3, 2, 1 en lugar de 1, 2, 3, 4, se tiene:
(2.8.7)
Ahora bien, después de un paso en la eliminación de Gauss:
(2.8.8)
Observe que no se pierde el grado original de dispersidad en la ecuación 2.8.8.
El reordenamiento de los buses/barras según el número de ramas conectadas se efectuara una vez, antes que comience el proceso de eliminación de Gauss. De manera alternativa, se puede reenumerar los buses/barras durante cada paso de la eliminación de Gauss a fin de considerar los cambios durante el proceso de eliminación.
40
2.9 FLUJOS DE POTENCIA POR EL MÉTODO
DESACOPLADO RÁPIDO
Las contingencias son una preocupación importante en las operaciones de sistemas de potencia. Por ejemplo, el personal de operación necesita saber qué cambios de flujos de potencia ocurrirán debido a la falla de un generador particular o una línea de transmisión. La información de contingencia, cuando se obtiene en tiempo real, se puede utilizar para anticipar problemas causados por tales fallas, y se pueden usar para programar estrategias de operación que permitan superar los problemas.
Los algoritmos rápidos de flujos de potencia se crearon para dar soluciones en segundos o menos. Estos algoritmos se basan en la siguiente simplificación de la matriz jacobiana. Si
se ignoran , la ecuación 2.7.6 se reduce a dos conjuntos de ecuaciones
desacopladas:
(2.9.1)
(2.9.2)
El tiempo de computadora requerido para resolver las ecuaciones 2.9.1 y 2.9.2 es mucho menor que el necesario para resolver 2.7.6. Ademas, la reducción del tiempo de computadora se puede obtener a partir de la simplificación adicional de la matriz jacobiana.
Por ejemplo, supongamos que por unidad y . Entonces son
matrices de constantes cuyos elementos de la tabla 2.1 son los componentes imaginarios de
. Como tal, no tienen que calcularse de nuevo durante las iteraciones sucesivas.
Simplificaciones similares a estas permiten obtener soluciones rápidas de flujos de potencia. Para un número fijo de iteraciones, el algoritmo desacoplado rápido dado por las ecuaciones 2.9.1 y 2.9.2 no es tan preciso como el algoritmo exacto de Newton-Raphson. No obstante, los ahorros de tiempo de computadora se consideran más importantes.
41
2.10 POTENCIA COMPLEJA
Si se conocen las expresiones vectoriales para la tensión y corriente, se logra convenientemente el cálculo de potencia real y reactiva en forma compleja. Si la tensión a
través y la corriente en determinada carga o parte de un circuito se expresan por
e el producto de la tensión por el conjugado de la corriente es:
(2.10.1)
Esta cantidad, conocida como potencia compleja, comúnmente se designa por S. En forma rectangular:
(2.10.2)
Puesto que α-β, el ángulo de fase entre el tensión y la corriente, es θ en las ecuaciones anteriores,
(2.10.3)
La potencia reactiva Q es positiva cuando el ángulo de fase α-β, entre la tensión y la
corriente, es positiva, esto es cuando α > β, lo que significa que la corriente esta atrasando
la tensión. Alternativamente, Q es negativa para β > α, lo cual indica que la corriente adelanta la tensión. Esto está de acuerdo con la selección de un signo positivo para la potencia reactiva de un circuito inductivo y un signo negativo para la potencia reactiva de un circuito capacitivo. Para obtener el signo adecuado de Q, es necesario calcular S como
, en lugar de lo cual invierte el signo de Q.
2.10.1TRIANGULO DE POTENCIA
42
capacitiva tiene potencia, reactiva negativa y Q esta verticalmente hacia abajo. La figura
2.2, ilustra el triángulo de potencia compuesto de . Para una carga en atraso que
tiene un angulo de fase combinado con el triangulo de potencia compuesto de
, el cual es para una carga capacitiva con negativo. Estas dos cargas en
paralelo resultan en los lados del triangulo , y la hipotenusa . El
triangulo de fase entre tensión y corriente suministrado a la carga combinada es .
FIGURA 2.2 Triangulo de potencia para una carga inductiva.
2.10.2 DIRECCION DE FLUJO DE POTENCIA
La relación entre P, Q y la tensión de barra V, o tensión del generador E, con respecto a los signos P y Q es importante cuando se considera el flujo de potencia en un sistema. El problema implica la dirección del flujo de potencia, es decir, si se está generando o absorbiendo potencia cuando se especifica una tensión y una corriente.
43
Observando la figura 2.3 (b) con I circulando hacia la batería desde el terminal positivo al negativo, la carga de la batería parece ser la indicada, pero este es así solamente el caso en que E e I sean positivos, de modo que la potencia calculada como el producto de E por I sea positiva. Con estas relaciones entre E e I el signo positivo para la potencia se asigna a la carga de la batería.
Si en la figura 2.3 (a), la dirección de la flecha para I se invierte, la descarga de la batería se indica por un signo positivo para I y para la potencia. Así, el diagrama del circuito determina si un signo positivo es para la potencia está asociado con la carga o la descarga o la descarga de la batería. Esta explicación parece innecesaria pero suministra la base para interpretar las relaciones de los circuitos c.a.
FIGURA 2.3 Conexiones de: a) un Ampérmetro y un vóltmetro para medir corriente (I) y tensión (E) de c.d. de una batería; b) un wáttmetro para medir la potencia real absorbida por una fuente de tensión (E) de c.a. ideal.
Para un sistema c.a. La figura 2.3 (b), muestra una tensión generada, una fuente de tensión ideal (magnitud constante, frecuencia constante, impedancia cero), con señales de polaridad, las cuales, como es usual, indican el terminal que es positivo durante el medio ciclo de tensión positivo instantáneo. Por supuesto, el terminal señalado como positivo, efectivamente es el terminal negativo durante el medio ciclo negativo de tensión instantáneo. Analógicamente, la flecha indica la dirección durante el medio ciclo de corriente positiva. El wáttmetro de la figura 2.3 (b), tiene una bobina de corriente y una de
tensión que corresponden al amperímetro y al voltímetro , respectivamente. Las
44
(2.10.4)
Donde es el ángulo de fase por el que I atrasa a V. De aquí que si la lectura del wáttmetro
es positiva para las conexiones mostradas en la figura 2.3 (b), es positiva,
y la potencia real es absorbida por E. Si el wattmetro tiende a dar lecturas negativas,
entonces es negativa, e invertir las conexiones de la bobina de corriente o
de la bobina de tensión (pero no ambas) origina que la lectura sea positiva, lo que indica que la potencia positiva es suministrada por E a la caja. Esto es equivalente a decir que la potencia negativa es absorbida por E. Si se reemplaza el wáttmetro por un vóltmetro, se aplican consideraciones similares al signo de la potencia reactiva Q que es absorbida o suministrada por E. En general, se puede determinar la P y Q absorbida o suministrada por un circuito de corriente alterna, al considerar el circuito encerrado en una caja con la corriente I que entra y la tensión V teniendo la polaridad mostrada en la Figura 2.4.
46
CAPITULO III. CORTO CIRCUITO/FALLAS
SIMETRICAS
Los cortos circuitos o fallas simétricas, ocurren en los sistemas de potencia cuando falla el aislamiento del equipo, debido a sobretensiones del sistema por rayos o variaciones por maniobras de interruptores, la contaminación del aislamiento o a otras causas mecánicas. El corto circuito resultante o la corriente de “falla” se determina por las tensiones internos de las maquinas síncronas y por las impedancias del sistema entre las tensiones de máquina y falla. Las corrientes de corto circuito pueden ser mucho más grandes que las corrientes de operación normales y, si se les permite persistir, podrían causar daños térmicos al equipo. Los devanados y barras colectoras también podrían sufrir daño mecánico debido a altas fuerzas magnéticas durante las fallas. Por consiguiente, es necesario eliminar del servicio las secciones con falla de un sistema de potencia tan pronto sea posible. El equipo de protección estándar se diseña para eliminar las fallas dentro de 3 ciclos (50ms a 60 Hz).
3.1 CORTO CIRCUITO TRIFASICO: MÁQUINA SINCRONA
SIN CARGA
Un corto circuito trifásico en las terminales de una máquina síncrona es llevar a cabo una prueba en una máquina real. En la siguiente figura, se muestra un oscilograma de la corriente de falla de c.a. en una fase de una máquina síncrona sin carga durante tal prueba. La amplitud de la onda sinusoidal disminuye desde un valor inicial alto hasta un valor menor de régimen estable.
47
Una explicación física para este fenómeno es que el flujo magnético causado por las corrientes de armadura de falla simetrica inicialmente es forzado a fluir por las trayectorias de reluctancia alta que no unen el devanado de excitación o los circuitos de amortiguamiento de la máquina. Esto es resultado del teorema de enlaces de flujo constante, el cual establece que el flujo que enlaza un devanado cerrado no puede cambiar en forma instantánea. La inductancia de armadura, que es inversamente proporcional a la reluctancia, es por consiguiente, baja al inicio. A medida que el flujo se mueve hacia las trayectorias de menor reluctancia, se incrementa la inductancia de armadura.
El desplazamiento máximo de c.d. en cualquier fase, que ocurre cuando α=0, por lo tanto:
(3.1.1)
Donde:
Las reactancias de la máquina asi como las constantes de tiempo las
48
TABLA 3.1 Valores promedio típicos de las constantes de una maquina síncrona.
3.2 CORTO CIRCUITOS TRIFASICOS EN SISTEMAS DE
POTENCIA
A fin de calcular la corriente de falla subtransitoria para un corto circuito trifásico en un sistema de potencia, se hacen las suposiciones siguientes:
1. Los transformadores se representan por sus reactancias de dispersión. Se ignoran las
resistencias de devanados, las admitancias en derivación y los desfasamientos Δ-Y.
2. Las líneas de transmisión están representadas por sus reactancias equivalentes en
serie. Se ignoran las resistencias en serie y las admitancias en derivación.
3. Las maquinas síncronas están representadas por fuentes de tensión constante detrás
de las reactancias subtransitorias. Se ignora la resistencia en derivación.
49
5. Se ignoran los motores de inducción (en particular motores pequeños con capacidad
nominal debajo de 50 hp) o se representan de la misma manera que las maquinas síncrona.
Estas suposiciones se hacen para simplificar, y en la práctica no se deben hacer para todos los casos. En sistemas de distribución, las resistencias de las líneas de distribución primarias y secundarias en algunos casos podrían reducir significativamente las magnitudes de las corrientes de falla.
3.3 COMPONENTES SIMETRICAS
El método de componentes simétricas, es una técnica poderosa para analizar sistemas trifásicos desbalanceados. Se define como una transformación lineal a partir de componentes de fase a un conjunto de componentes llamadas componentes simétricas. La ventaja de esta transformación es que, para redes trifásicas balanceadas, los circuitos equivalentes obtenidos para componentes simétricas, denominadas redes de secuencia, se separan en tres redes desacopladas. Más aun, para sistemas trifásicos desbalanceados, las tres redes de secuencia están conectadas solo en puntos de desbalance. Como resultado, es relativamente fácil analizar las redes de secuencia para muchos casos de sistemas trifásicos desbalanceados. El método de componentes simétricas es básicamente una técnica de modelado que permite llevar a cabo análisis y diseños sistemáticos de sistemas trifásicos. Desacoplar una red trifásica detallada en tres redes de secuencia más simples presenta fenómenos complicados en términos menos complejos. Los resultados de la red de secuencia se pueden superponer para obtener resultados de red trifásica.
Definición de componentes simétricas:
Supongamos que se tiene un conjunto de tensiones trifásicos designados , , y
. Estas tensiones de fase separan en los siguientes tres conjuntos de componentes de secuencia.
1. Componentes de secuencia cero, que consisten en tres fasores con magnitudes
50
2. Componentes de secuencia positiva, que constan de tres fasores con magnitudes
iguales, desplazamiento de fase de ± 120° y secuencia positiva, como en la Figura
3.2 (b).
3. Componentes de secuencia negativa, que consisten en tres fasores con magnitudes
iguales, desplazamiento de fase ± 120° y secuencia negativa, como en la Figura 3.2
(c).
FIGURA 3.2 Desplazamiento de las componentes simétricas.
Cuando se resuelve un problema por componentes simétricas, se acostumbra a designar las tres fases de un sistema por las letras a, b y c, de tal forma, que la secuencia de fases de las tensiones y corrientes en el sistema sea abc. Por lo tanto, la secuencia de fases de los componentes de secuencia positiva de los vectores desequilibrados, es abc y la de los componentes de secuencia negativa, acb. Si los vectores originales son tensiones, pueden
designarse por y . Los tres conjuntos de componentes simetricos se designan con
el subíndice adicional 1 para los componentes de secuencia positiva, 2 para los componentes de secuencia negativa y 0 para los componentes de secuencia cero. Los
componentes de secuencia positiva de y , son y . De igual forma, los
componentes de secuencia negativa son y y los de secuencia cero, y
. Los vectores que representan corrientes se representan por I con los mismos
51
Como cada uno de los vectores desequilibrados originales es igual a la suma de sus componentes, los vectores originales expresados en función de sus componentes son:
(3.3.1)
(3.3.2)
(3.3.3)
Es conveniente, por los desplazamientos de fase de las componentes simétricas de las tensiones y las corrientes en un sistema trifásico, disponer de un método taquigráfico para indicar la rotación de un vector 120 °. El resultado de la multiplicación de dos números complejos, es igual al producto de sus módulos y a la suma de sus ángulos. Si el numero complejo, que representa a un vector, se multiplica por un vector, se multiplica por un numero complejo de modulo unidad y ángulo Ø, el numero complejo resultante representa a un vector igual al original, pero desplazado un ángulo Ø.
El numero complejo de modulo unidad y argumento Ø es un operador que gira, al vector a que se aplica un ángulo Ø.
3.3.1 OPERADORES:
Nos es ya familiar el operador j, que origina un giro de 90° y el operador -1, que hace girar
180°. Dos aplicaciones sucesivas del operador j, dan lugar a un giro de 90° + 90°, lo que
nos dice que, j x j equivale a una rotación de 180° y que, por tanto, es igual a -1. En
forma similar pueden hallarse las demás potencias de j.
La letra a se utiliza normalmente para designar al operador que origina una rotación de 120° en sentido contrario al movimiento de las agujas del reloj. Tal operador es un número complejo de modulo unidad y argumento de 120° y viene definido por las expresiones siguientes:
52
Es preciso hacer notar una importante diferencia entre los usos de los operadores j y a. El
operador j es de modulo unidad a 90° y –j significa que el numero complejo j se cambia en
un ángulo de 180° para dar un modulo unidad a 270°. Por tanto:
De aquí que a veces se diga que +j indica un giro de +90° y –j, de -90°. La afirmación es
correcta, pero no puede aplicarse una afirmación similar al operador a, puesto que,
53
3.3.2 COMPONENTES SIMETRICOS DE VECTORES ASIMETRICOS
Con referencia a las ecuaciones 3.3.1 y 3.3.2, examinemos de qué forma podemos descomponer tres vectores asimétricos en sus componentes simétricos.
Observamos que el número de magnitudes desconocidas puede reducirse, expresando cada
componente de y como el producto de una función del operador a y un componente
de . Por lo tanto se obtienen las relaciones siguientes:
(3.3.4)
Repitiendo la ecuación 3.3.1 y sustituyendo las ecuaciones 3.3.4, en las 3.3.2 y 3.3.3, obtenemos:
(3.3.5)
(3.3.6)
(3.3.7)
Se definen mediante la siguiente transformación matricial:
(3.3.8)
Por conveniencia hacemos:
54
Entonces, como puede comprobarse fácilmente:
(3.3.10)
Y premultiplicando ambos miembros de la ecuación 8, por la , tendrá:
(3.3.11)
Lo cual nos enseña como descomponer tres vectores asimétricos en sus componentes simétricas. Estas relaciones son tan importantes que las escribiremos por separado en la forma ordinaria. De la ecuación 3.3.11:
(3.3.12)
(3.3.13)
(3.3.14)
Si se necesitan, los componentes , , , , y se pueden determinar por
las ecuaciones 3.3.4.
La ecuación 3.3.12, demuestra que no hay componentes de secuencia cero si la suma de los vectores desequilibrados es cero. Como la suma de los vectores de tensión entre líneas en un sistema trifásico es siempre cero, los componentes de secuencia cero no existen nunca en las tensiones de línea y neutro no es necesariamente cero y, por lo tanto, las tensiones, respecto al neutro, pueden tener componentes de secuencia cero.
55
las tensiones. Pueden resolverse analítica o gráficamente. Las ecuaciones anteriores son tan fundamentales que conviene escribirlas para las corrientes:
(3.3.15)
(3.3.16)
(3.3.17)
(3.3.18)
(3.3.19)
(3.3.20)
En un sistema trifásico, la suma de las corrientes en las líneas, es igual a la corriente en
el retorno por el neutro. Por tanto:
(3.3.21)
Comparando las ecuaciones 18 y 21, se obtiene la ecuación 3.3.22:
(3.3.22)
Si no hay retorno por el neutro de un sistema trifásico, es cero y las corrientes en las
líneas no contienen componentes de secuencia cero. Una carga conectada en ∆ no tiene
retorno por el neutro y, por tanto, las corrientes que van a una carga conectada en ∆ no contienen componentes de secuencia cero.
3.3.3 POTENCIA EN FUNCION DE LAS COMPONENTES SIMETRICAS
Si se conocen los componentes simétricos de la corriente y la tensión, puede ser calculada directamente la potencia suministrada en un circuito trifásico a partir de los componentes.
56
La potencia total compleja transmitida en un circuito trifásico por tres líneas, a, b y c, vienen dada por:
(3.3.23)
En la que son las tensiones respecto al neutro en las terminales, e , las
corrientes que entran al circuito por las tres líneas. Puede existir o no neutro. Con la notación matricial:
(3.3.24)
En la que se sobreentiende que la conjugada de una matriz tiene sus elementos que son conjugados de los elementos correspondientes de la matriz original.
Para introducir los componentes simétricos de las tensiones y corrientes, haremos uso de las ecuaciones 3.3.8 y 3.3.9, dando como resultado:
(3.3.25)
Siendo:
(3.3.26)
La regla de la inversión del algebra matricial establece que la transpuesta del producto de dos matrices es igual al producto de las transpuestas de la matrices en orden inverso. De acuerdo con esta regla, tenemos:
57
Por lo tanto:
(3.3.28)
Observando que y que son conjugadas, obtenemos:
(3.3.29)
La potencia compleja es por tanto:
Ecu. (3.3.30)
Que muestra cómo puede calcularse la potencia compleja a partir de los componentes simétricos de las tensiones y las corrientes de un circuito trifásico equilibrado.
3.4 REDES DE SECUENCIA
3.4.1 POSITIVA Y NEGATIVA
El objetivo de obtener los valores de las impedancias de secuencia de un sistema de energía es hacer posible la construcción de las redes de secuencia de todo el sistema. La red de una secuencia particular muestra todos los caminos para la circulación de la corriente, de tal secuencia, en el sistema.