Instituto Politécnico Nacional
Escuela Superior de Ingeniería Mecánica y Eléctrica
Departamento de Posgrado
Estudio del campo de esfuerzos en materiales compuestos
sujetos a excitaciones dinámicas mediante el método de
elementos frontera.
T E S I S
Para obtener el grado de Maestro en Ciencias en Ingeniería Mecánica
Presenta
Ing. Adrián Hernández García
Directores de Tesis
Dr. Didier Samayoa Ochoa
Dr. Alejandro Rodríguez Castellanos
Resumen
Abstract
Antecedentes
Este trabajo surgió como la inquietud de la ingeniería de obtener nuevas técnicas de caracterización de materiales y de detección de defectos, ya que el correcto entendimiento del fenómeno de las ondas de interfase permitiría su implementación practica con el fin de poder ser aplicado a la rama que quiera ser aplicado, por ejemplo esta es una técnica que permitiría caracterizar hidrocarburos en lechos marinos, o detección de grietas en ductos y tuberías, o también puede ser utilizada para obtener imágenes biomédicas.
Objetivo
El Objetivo de este trabajo es la generación de tecnología de alto valor para la ingeniería en base a un modelo numérico que simula el comportamiento dinámico de materiales que se encuentran unidos y que comparten una interfase entre ellos. Específicamente este trabajo trata acerca de la caracterización y el estudio del comportamiento de materiales diversos tales como metales y polímeros entre otros. Pero para alcanzar este objetivo se requiere resolver varias componentes críticas:
1. Desarrollar un modelo numérico que permita el adecuado estudio del fenómeno e implementarlo por medio de un lenguaje computacional. Esta componente involucra por facilidad adoptar algún desarrollo similar y adaptarlo a las condiciones de operación que más se ajusten a nuestras necesidades.
2. Entendimiento físico de los desplazamientos del fenómeno ondulatorio mecánico en función del estado de esfuerzos, dentro de la el marco de referencia de la teoría desarrollada alrededor de las ecuaciones de Movimiento.
3. Selección y desarrollo de casos de estudio que nos permitan llegar a una descripción adecuada del fenómeno ondulatorio en interfases, y que además no permitan generar análisis adecuados y que permitan generar conclusiones asertivas y productivas.
4. Analizar de forma coherente y amplia los resultados obtenidos con el fin de generar conocimiento de alto valor para la ingeniería.
Justificación
Contenido
Resumen ... 4
Abstract ... 5
Antecedentes ... 6
Objetivo ... 6
Justificación ... 6
1. Estado del arte en interfases ante excitaciones dinámicas. ... 11
1.1 Introducción ... 11
1.2 Aplicaciones del fenómeno de las ondas ... 12
1.3 Marco Histórico ... 13
1.4 Estado del arte ... 14
2. Marco teórico Conceptual ... 16
2.1 Ondas elásticas ... 16
2.2 Ecuaciones de movimiento ... 17
2.2.1 Fuerzas de Superficie e Internas. ... 17
2.2.2 Ecuaciones de Equilibrio y Ecuación de Movimiento. ... 19
2.3 La ecuación de Navier ... 22
2.4 La ecuación de onda ... 24
2.5 Ondas de interfase ... 28
2.6 Ondas de Rayleigh ... 30
2.7 Ondas de Stoneley ... 30
2.8 Ondas de Scholte ... 30
3. El Método Indirecto de Elementos Frontera ... 31
3.1 Generalidades del método ... 31
3.2 Representaciones integrales ... 32
3.3 Funciones de Green para espacios completos ... 33
3.4 Casos de estudio ... 35
3.4.1 Planteamiento del problema ... 35
3.4.2 Condiciones de frontera ... 35
3.4.4 Sistema de ecuaciones integrales ... 39
3.5 La Transformada Discreta de Fourier ... 45
4 Ejemplos Numéricos ... 51
4.1 Selección de ejemplos numéricos ... 51
4.2 Análisis de resultados en el dominio de la frecuencia ... 55
4.3 Análisis de resultados en el dominio del tiempo ... 72
5 Conclusiones y Recomendaciones ... 88
5.4 Conclusiones ... 88
5.5 Recomendaciones ... 89
5.6 Trabajo futuro ... 89
Bibliografía ... 90
Anexo A ... 93
Anexo B ... 95
Anexo C ... 96
Tabla de Figuras
FIGURA 1ONDAS DE COMPRESIÓN. ... 16
FIGURA 2ONDAS DE CORTE. ... 17
FIGURA 3 COMPORTAMIENTO ELÍPTICO Y RETROGRADA DE LAS ONDAS DE RAYLEIGH ... 17
FIGURA 4FUERZAS INTERNAS EN UN CUERPO. ... 18
FIGURA 5LA FUNCIÓN EN EL TIEMPO Y ... 26
FIGURA 6SEMI-ESPACIO ELÁSTICO ... 27
FIGURA 7DOS SEMI-ESPACIOS DE UN MATERIAL ELÁSTICO UNIDOS ... 28
FIGURA 8(A)ONDA INCIDENTE.(B)ONDA REFRACTADA Y DIFRACTADA. ... 29
FIGURA 9MODELOS CANÓNICOS INTERFASE QUE SE DEBEN RESOLVER POR MEDIO DEL MÉTODO INDIRECTO DE ELEMENTOS FRONTERA. A)LA INTERFASE VACÍO-SÓLIDO, B) LA INTERFASE SÓLIDO-SÓLIDO, Y C) DE LA INTERFASE LÍQUIDO-SÓLIDO. ... 31
FIGURA 10DEFINICIÓN GRAFICA DE C EN UN SEMIESPACIO Y DOS SEMIESPACIOS ... 33
FIGURA 11CONDICIONES DE FRONTERA PARA LAS TRES INTERFASES ... 36
FIGURA 12MALLADO DE LOS ELEMENTOS FRONTERA ... 38
FIGURA 13SISTEMA DE ECUACIONES A RESOLVER PARA LA INTERFACE VACÍO-SÓLIDO. ... 41
FIGURA 14SISTEMA DE ECUACIONES A RESOLVER PARA LA INTERFACE SOLIDO-SOLIDO ... 42
FIGURA 15SISTEMA DE ECUACIONES A RESOLVER PARA LA INTERFASE FLUIDO-SÓLIDO ... 42
FIGURA 16DIAGRAMA DE FLUJO DEL PROGRAMA COMPUTACIONAL PARA RESOLVER EL SISTEMA DE ECUACIONES INTEGRALES. ... 43
FIGURA 17DIAGRAMA DE FLUJO DE LA RUTINA SISTEQ ... 44
FIGURA 18TRES ETAPAS EN EL CÁLCULO DE LA TDF DE 8 PUNTOS ... 50
FIGURA 198PUNTOS DE ELIMINACIÓN EN TIEMPO DE LA TDF ... 50
FIGURA 20CONDICIONES PARA LA SIMULACIÓN NUMÉRICA DE LA INTERFASE VACÍO-SÓLIDO. ... 53
FIGURA 21CONDICIONES PARA LA SIMULACIÓN PARA LA INTERFASE SÓLIDO-SÓLIDO. ... 54
FIGURA 22CONDICIONES DE SIMULACIÓN PARA LA INTERFASE FLUIDO-SÓLIDO. ... 54
FIGURA 23ESPECTROS DE DESPLAZAMIENTO HORIZONTAL Y VERTICAL PARA LOS TRES MODELOS DE INTERFASE DEL CASO 1. ... 56
FIGURA 24ESPECTROS DE DESPLAZAMIENTO HORIZONTAL Y VERTICAL PARA LOS TRES MODELOS DE INTERFASE DEL CASO 2. ... 58
FIGURA 25ESPECTROS DE DESPLAZAMIENTO HORIZONTAL Y VERTICAL PARA LOS TRES MODELOS DE INTERFASE DEL CASO 3. ... 60
FIGURA 26ESPECTROS DE DESPLAZAMIENTO HORIZONTAL Y VERTICAL PARA LOS TRES MODELOS DE INTERFASE DEL CASO 4. ... 62
FIGURA 27COMPONENTES DE DESPLAZAMIENTO DE LAS ONDAS DE RAYLEIGH. ... 63
FIGURA 28COMPONENTES DE DEPLAZAMIENTO HORIZONTAL Y VERTICAL PARA LAS ONDAS DE RAYLEIGH EN DIVERSAS CONFIGURACIONES DE FUENTE. ... 65
FIGURA 29COMPONENTES DE DEPLAZAMIENTO HORIZONTAL Y VERTICAL PARA LAS ONDAS DE SCHOLTE EN DIVERSAS CONFIGURACIONES DE FUENTE. ... 67
FIGURA 30COMPONENTES DE DEPLAZAMIENTO HORIZONTAL Y VERTICAL PARA LAS ONDAS DE STONELEY EN DIVERSAS CONFIGURACIONES DE FUENTE. ... 69
FIGURA 31COMPARATIVA DE LAS ONDAS DE RAYLEIGH,SCHOLTE Y STONELEY CONTRA LA ONDA ANALÍTICA DE RAYLEIGH ... 71
FIGURA 32SISMOGRAMAS SINTÉTICOS PARA TRES MODELOS DE INTERFASE DEL CASO DE ANÁLISIS 1 DEL LADO IZQUIERDO SE ENCUENTRA LA COMPONENTE HORIZONTAL Y DEL LADO DERECHO LA COMPONENTE VERTICAL. ... 73
FIGURA 34SISMOGRAMAS SINTÉTICOS PARA TRES MODELOS DE INTERFASE DEL CASO DE ANÁLISIS 2 DEL LADO IZQUIERDO SE
ENCUENTRA LA COMPONENTE HORIZONTAL Y DEL LADO DERECHO LA COMPONENTE VERTICAL. ... 76
FIGURA 35COMPONENTES HORIZONTAL Y VERTICAL DE DESPLAZAMIENTO DEL ÚLTIMO RECEPTOR PARA LOS TRES MODELOS DE
INTERFASE PARA EL CASO DE ANÁLISIS 2. ... 77
FIGURA 36SISMOGRAMAS SINTÉTICOS PARA TRES MODELOS DE INTERFASE DEL CASO DE ANÁLISIS 3 DEL LADO IZQUIERDO SE
ENCUENTRA LA COMPONENTE HORIZONTAL Y DEL LADO DERECHO LA COMPONENTE VERTICAL. ... 79
FIGURA 37COMPONENTES HORIZONTAL Y VERTICAL DE DESPLAZAMIENTO DEL ÚLTIMO RECEPTOR PARA LOS TRES MODELOS DE
INTERFASE PARA EL CASO DE ANÁLISIS 3. ... 80
FIGURA 38SISMOGRAMAS SINTÉTICOS PARA TRES MODELOS DE INTERFASE DEL CASO DE ANÁLISIS 4 DEL LADO IZQUIERDO SE
ENCUENTRA LA COMPONENTE HORIZONTAL Y DEL LADO DERECHO LA COMPONENTE VERTICAL. ... 82
FIGURA 39COMPONENTES HORIZONTAL Y VERTICAL DE DESPLAZAMIENTO DEL ÚLTIMO RECEPTOR PARA LOS TRES MODELOS DE
INTERFASE PARA EL CASO DE ANÁLISIS 4. ... 83
FIGURA 40SNAPSHOTS PARA LA INTERFASE VACÍO-CONCRETO EN UNA MALLA DE 51X51 RECEPTORES, LA COLUMNA DE LA
IZQUIERDA REPRESENTA EL DESPLAZAMIENTO HORIZONTAL Y LA COLUMNA DE LA DERECHA EL DESPLAZAMIENTO VERTICAL.
LA ONDA DE RAYLEIGH SE PUEDE OBSERVAR EN EL SEMICÍRCULO PUNTEADO ... 85
FIGURA 41SNAPSHOTS PARA LA INTERFASE ACERO-CONCRETO EN UNA MALLA DE 51X51 RECEPTORES, LA COLUMNA DE LA
IZQUIERDA REPRESENTA EL DESPLAZAMIENTO HORIZONTAL Y LA COLUMNA DE LA DERECHA EL DESPLAZAMIENTO VERTICAL.
LA ONDA DE STONELEY SE PUEDE OBSERVAR EN EL SEMICÍRCULO PUNTEADO. ... 86
FIGURA 42SNAPSHOTS PARA LA INTERFASE AGUA-CONCRETO EN UNA MALLA DE 51X51 RECEPTORES, LA COLUMNA DE LA
IZQUIERDA REPRESENTA EL DESPLAZAMIENTO HORIZONTAL Y LA COLUMNA DE LA DERECHA EL DESPLAZAMIENTO VERTICAL.
1.
Estado del arte en interfases ante excitaciones dinámicas.
1.1 Introducción
Para mucha gente la palabra “onda” trae a la mente una descripción de un océano, con las olas barriendo la playa, procedentes del mar abierto. Si se ha examinado y pensado sobre ese fenómeno puede que se saque la apreciación de que a pesar de toda su grandeza contiene un elemento de contradicción. Al ver las crestas cabalgando, se adquiere un cierto sentido de asalto masivo por el agua sobre la tierra, y verdaderamente las ondas pueden hacer un gran daño, lo que equivale a decir que son portadoras de energía, pero a pesar de todo, cuando las ondas u olas han roto y vuelto hacia atrás, el agua está prácticamente en el mismo sitio respecto a la playa que estaba antes. La avalancha hacia adelante no significa un movimiento físico del agua. Las olas largas del mar abierto se mueven rápidamente y van muy lejos. Las olas que alcanzan la costa de California tienen sus orígenes en las tormentas del pacifico del sur a una distancia superior a los 15,000 Km y han recorrido esta distancia a una velocidad de 60 Km por hora o más aún. Evidentemente el mismo mar no se ha movido de este modo espectacular; simplemente ha jugado el papel de agente mediante el cual se transmite un cierto efecto. Y aquí tenemos la característica principal de lo que se denomina movimiento ondulatorio. Se transmite una propiedad de un lugar a otro por medio de un medio, pero el medio en sí mismo no se transporta. Puede relacionarse un efecto local a una causa distante y existe una diferencia de tiempo entre la causa y el efecto que depende de las propiedades del medio y encuentra su expresión en la velocidad de la onda. Todos los medios materiales, sólidos, líquidos y gases, pueden transportar energía e información por medio de ondas.
Los terremotos son detectados y estudiados al medir las ondas que crean. Las ondas son transmitidas a través de la tierra y pueden emplearse para detectar depósitos de petróleo y gas, además de estudiar la estructura geológica de la tierra. Las propiedades de los materiales pueden ser determinadas al medir el comportamiento de las ondas transmitidas sobre ellos. En los últimos años, las ondas elásticas transmitidas a través del cuerpo humano han sido utilizadas para diagnóstico y terapia.
La razón de este cambio es en primer lugar como resultado del desarrollo de técnicas electrónicas, ondas elásticas a altas frecuencias pueden ser producidas y detectadas fácilmente, en segundo lugar el desarrollo de nuevos materiales como los polímeros ha incrementado el interés en el comportamiento mecánico de materiales imperfectos y el estudio de las ondas elásticas proporcionan una excelente herramienta para estudiar las propiedades mecánicas de estas substancias, además el estudio de las propiedades mecánicas a de los materiales sometidos a cargas cíclicas es extremadamente importante desde el punto de vista de la ingeniería.
1.2 Aplicaciones del fenómeno de las ondas
Las aplicaciones prácticas del fenómeno de las ondas se remontan a la historia temprana del hombre. Por ejemplo en la fabricación de herramientas de piedra consiste en golpear cuidadosamente los bordes de un pedernal. En este caso las ondas de esfuerzo resultantes en el “cono de percusión” rompen fragmentos de roca en patrones específicos. Desde este punto de la historia podríamos decir que el interés en los fenómenos ondulatorios ha crecido.
Actualmente las motivaciones para estudiar el fenómeno son muchas aplicaciones en la industria y en la ciencia. En el área de estructuras por ejemplo, el interés es principalmente en respuesta a las cargas de impacto. Bajo cargas transitorias de fuerza moderada, condiciones totalmente elásticas en toda la estructura, la teoría de ondas elásticas es suficiente para predecir todos los aspectos de la respuesta de la estructura. Bajo cargas más severas, deformación local permanente, fractura, o perforación. La teoría de las ondas elásticas es capaz de predecir la respuesta de la estructura fuera del área de impacto.
El comportamiento de materiales estructurales bajo cargas suficientemente severas para causar daño permanente es un área de gran interés. Estudios en esta área generalmente caen en la categoría de propagación de ondas inelásticas. Algunas de las técnicas de estudio de estas propiedades usan ondas elásticas. Tales como ondas de gran fuerza en barras de acero, para probar dinámicamente especímenes de materiales más débiles. La mayoría de las aplicaciones en esta área son en varios aspectos de tecnología militar y espacial. Aunque existen una gran cantidad de procesos de conformado de metal como el conformado explosivo, conformado de alta eficiencia energética, el remachado sónico.
general un pulso mecánico. La detección es concretada cuando el pulso mecánico choca con un cristal piezoeléctrico y genera una señal eléctrica.
1.3 Marco Histórico
La historia del estudio de los fenómenos de las ondas y de las vibraciones se remonta a cientos de años. La mayoría de estos estudios eran más observacionales que cuantitativos y frecuentemente se referían a la música o a las ondas en el agua, dos de las más comunes asociaciones con el movimiento de ondas. Desde el tiempo de Galileo, la ciencia de las vibraciones y de las ondas progresa rápidamente en asociación con los desarrollos en estática de sólidos. Algunos de los desarrollos más importantes están cronológicamente ordenados a continuación.
Siglo XI a.c. Pitágoras estudio el origen del sonido musical y la vibración de las cuerdas.
1638: Galileo describió la vibración de péndulos, el fenómeno de la resonancia, y los factores de influencia en la vibración de cuerdas.
1638: Robert Hooke formulo la ley de proporcionalidad entre el esfuerzo y la deformación para cuerpos elásticos. Esta ley es la base para la teoría dinámica y estática de la elasticidad.
1686: Newton Investiga la velocidad de las ondas en el agua y la velocidad del sonido en el aire.
1744: Leonard Euler (1744) y Daniel Bernoulli (1751) desarrollaron la ecuación para la vibración de vigas y obtuvieron los modos normales para diversas condiciones de frontera.
1747: D’Alambert derivo la ecuación de movimiento de la cuerda y resolvió el problema de valor inicial.
1821: Navier investigo las ecuaciones generales de equilibrio y vibración de solidos elásticos. Aunque no todos los desarrollos de su trabajo tuvieron una aceptación general, representa uno de los desarrollos más importantes en la mecánica.
1822: Cauchy desarrollo la mayoría de los aspectos de la teoría de la elasticidad incluyendo las ecuaciones dinámicas del movimiento de un sólido. Poisson (1829) también investigo sobre las ecuaciones generales.
1828: Poisson investigo sobre la propagación de las ondas a través de solidos elásticos. El encontró que existen dos tipos de ondas elásticas las ondas transversales y las ondas longitudinales. Cauchy en 1830 encontró un resultado similar.
1887: Rayleigh investigo la propagación de ondas de superficie sobre un sólido.
1904: Lamb desarrollo la primera investigación acerca de la propagación de un pulso sobre un espacio semi-infinito.
1.4 Estado del arte
El estudio de las ondas de interfase siempre ha atraído el interés de la comunidad científica debido a su importancia y complejidad de las ondas que se propagan en tales interfases. Por ejemplo, las ondas de Rayleigh son uno de los tres tipos de ondas de interfase, las cuales viajan en interfases que se forman entre vacío-solido. En solidos isotrópicos el movimiento de las partículas es elíptico y retrograda, para profundidades cerca de la superficie, con respecto a la dirección de propagación (1). En la actualidad muchos estudios ingenieriles y sismológicos ( (2) y (3)) están enfocados en entender las ondas de Rayleigh, trabajos recientes concernientes a las ondas de Rayleigh llevaron a pruebas no destructivas para detectar defectos.
Las ondas de Stoneley ocurren entre la interface de dos sólidos (4). La mayor cantidad energía así como en las ondas de Rayleigh se encuentra presente en la interface y se encuentra presente en la superficie y muestra un decaimiento exponencial lejos de la interfase importantes aplicaciones alrededor de este tipo de interfase se encuentran en (5) y (6).
Las ondas de Scholte se encuentran presentes en la interfase fluido-solido [ (7), (8)]. Similarmente la mayoría de la energía en este tipo de onda está presente en la interface y decae exponencialmente en el medio sólido y en el fluido también. Algunas aplicaciones especialmente aplicadas a lechos marinos, pueden ser vistas en (9) , (10) y (11).
Para modelar problemas realísticos y geometrías complejas, los métodos numéricos son buena opción. Métodos como el elemento finito (12), diferencias finitas (13), elemento frontera [ (14), (15)], elementos espectrales y pseudoespectrales [ (16), (17) ] han sido extensivamente usados.
Particularmente, el método del elemento frontera (BEM) ha sido útil para tratar problemas de interfases. Por ejemplo, basado en el BEM, un modelo acoplado fue desarrollado para investigar la interacción dinámica entre una estructura marina, un lecho marino poroso, y el agua de mar cuando están sometidos a una semi-onda de Stoneley a lo largo de la interface entre el lecho marino y el agua de mar (18). Se encontró que la máxima presión en los poros del lecho marino usualmente ocurre en la región cercana a las interfases entre el lecho marino y el agua de mar.
La caracterización de grietas superficiales usando ondas de Rayleigh fue posible por el método indirecto de elementos frontera. La variación de las tasas espectrales entre las ondas transmitidas e incidentes es estudiada como función de la profundidad de la grieta. Esto puede ser utilizado para determinar un método eficiente para determinar la profundidad de las grietas (20).
Las formulaciones del BEM también han sido utilizadas para estudiar la dispersión de las ondas de Rayleigh en cavidades (21). Aún más, métodos del BEM han sido desarrollados para estudiar la reflexión y transmisión de las ondas superficiales de Rayleigh en una coyuntura normal a la superficie libre, entre materiales idénticos o diferentes (22).
La propagación de una onda de Scholte en un orificio perforado lleno de agua, en un medio isotrópico es estudiado por medio de un método frontera con dominio en el tiempo (23), donde la identificación e interpretación de los frentes de onda acústicos y elásticos a lo largo de la interface fluido solido son identificados con precisión.
2.
Marco teórico Conceptual
2.1
Ondas elásticas
Las ondas elásticas son vibraciones mecánicas. Cuando una onda elástica pasa a través de una substancia, causa cambios locales en la densidad lo cual está relacionado con los desplazamientos locales de masa en relación a las posiciones de reposo de las partículas de la substancia. Este desplazamiento lleva a la formación de fuerzas que actúan para restaurar la densidad a su estado de equilibrio, moviendo las partículas a su estado de reposo. El medio puede ser un gas, un líquido, o un sólido.
Existen dos tipos fundamentales de ondas: las ondas de cuerpo y las ondas superficiales. Las ondas de cuerpo viajan a través del interior. Siguen caminos curvos debido a la variada densidad y composición del interior de la substancia. Este efecto es similar al de refracción de ondas de luz. Las ondas de cuerpo transmiten los temblores preliminares de un terremoto pero poseen poco poder destructivo. Las ondas de cuerpo son divididas en dos grupos: ondas de compresión (P) y ondas corte (S).
Ondas de compresión (Ondas P): Estas consisten en la transmisión de compresiones y rarefacciones como en el caso de la transmisión del sonido; en este caso las partículas del medio se mueven en el mismo sentido en que se propaga la onda.
Figura 1 Ondas de Compresión.
Figura 2 Ondas de Corte.
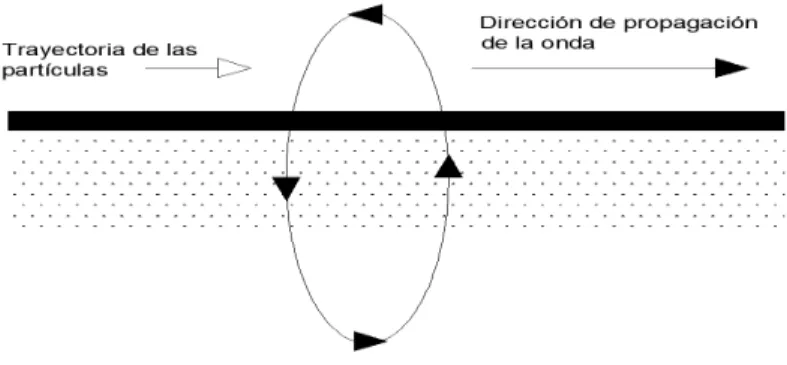
Ondas de superficie estas se generan cuando un sólido posee una superficie libre, como la superficie de la Tierra, pueden generarse ondas que viajan a lo largo de la superficie. Estas ondas tienen su máxima amplitud en la superficie libre, la cual decrece exponencialmente con la profundidad, y son conocidas como ondas de Rayleigh en honor al científico que predijo su existencia. La trayectoria que describen las partículas del medio al propagarse la onda es elíptica y retrógrada y ocurre en el plano de propagación de las ondas como se muestra en la Figura 3.
Figura 3 comportamiento elíptico y retrograda de las ondas de Rayleigh
2.2
Ecuaciones de movimiento
2.2.1
Fuerzas de Superficie e Internas.
Figura 4 Fuerzas internas en un cuerpo.
Y si definimos a ∆ como un área muy pequeña localizada en el plano de corte hipotético y a ∆ la fuerza resultante que actúa en el área ∆ , entonces podemos definir a como el vector de tracción (o de fuerzas que actúan sobre esa área como:
= lim∆ → ∆∆ 2.2.1-1 Donde es el vector unitario normal a ∆ .
Para el caso en que ∆ es tal que cuyo vector unitario normal coincide con los ejes coordenados (cuyos vectores unitarios son , , como se mostró en la Figura 4 entonces el vector de tracción puede escribirse para cada componente como:
= + + 2.2.1-2
= + + 2.2.1-3
= + + 2.2.1-4
= = ! 2.2.1-5
Por lo tanto la expresión (2) a (4) pueden expresarse como:
" # = ! ! = " # 2.2.1-6
Por otro lado cuando se tiene un plano de corte hipotético con una orientación diferente a los ejes coordenados, el vector unitario normal puede escribirse como:
= + + 2.2.1-7
Para este caso el vector de esfuerzo se representa como:
= $+ %+ & 2.2.1-8 O también:
= ' + + ( + ' + + ( + ( + + ) 2.2.1-9 En notación tensorial podemos escribir la ecuación 9 Como:
= +, + , 2.2.1-10 Y sus componentes como:
, = +, + 2.2.1-11
2.2.2
Ecuaciones de Equilibrio y Ecuación de Movimiento.
Si se tiene un volumen V como el de la Figura 4, delimitado por su frontera S, sujeto a un sistema de fuerzas de superficie, se dice que dicho cuerpo estará en equilibrio estático si se tiene que:
- = . 2.2.2-1
- = / / ,
0
1-2.2.2-2
. = / / / ,
2 13
2.2.2-3
Por condiciones de equilibrio entonces la ecuación 2.2.1-1 puede escribirse como:
/ / ,
0 1- + / / /2 ,13 = 0
2.2.2-4
Para poder sumar las integrales de la ecuación 2.2.2-4 es necesario emplear el Teorema de la divergencia de Gauss1 el cual de manera muy simple podríamos definir como:
Definamos a 5 como un campo vectorial continúo y tiene primera derivada continúa en 3, es válida la siguiente igualdad:
/ / 5
1-6
= / / / ∇ ∙ 519
2
2.2.2-5
O mediante notación indicial el teorema de Gauss puede escribirse como:
/ / 5,+ + 1-6
= / / / 5,+⋅+ 19 2
2.2.2-6
Primeramente expresamos la integral de superficie sobre sus componentes.
/ / ,
1-6
= / / ,, + 1-6
2.2.2-7
De esta manera ya es posible aplicar el teorema de Gauss a la ecuación 2.2.2-4 como se muestra a continuación:
/ / , 1-6
= / / ,, + 1-6
= / / / +,,+ 19 2
2.2.2-8
Dado que las dos integrales son ahora del mismo tipo entonces
1
/ / , 1-6
+ / / / , 19 2
= / / / +,⋅+ 19 2
+ / / / , 19 2
= / / /' +,,++ ,(19 = 0 2
2.2.2-9
Debido a que la ecuación 2.2.2-9 debe ser válida para cualquier volumen 3 entonces
+,,++ ,= 0 2.2.2-10
Expresando 2.2.2-10 en forma escalar se tienen las ecuaciones de equilibrio:
<=>
< + <?>@
< +<?<>A+ = 0
2.2.2-11 B BC + B BD + B
BE + = 0
2.2.2-12
<?A>
< + <?A@
< +<=<A+ = 0
2.2.2-13
Si el cuerpo se encuentra en movimiento debe entonces cumplirse el principio de d´Alembert2
para establecer las condiciones de equilibrio. Para esto se incluye las fuerzas de inercia y se incorporan a las ecuaciones de equilibrio, esto es:
/ / ,
1-6
+ / / / , 19 2
− / / / G B 5BH 19,
2
= 0 2.2.2-14
Donde G es la densidad del material.
Con un desarrollo similar al presentado anteriormente se llega a la siguiente ecuación que representa a la segunda ley de Newton.
B I,
BJI + ,= G
B 5,
BH
2.2.2-15
Y en forma escalar
2
B BC +
B BD +
B
BE + = G B 5
BH 2.2.2-16
B
BC +BBD +BBE + = G B 5BH 2.2.2-17 B
BC + B
BD +BBE + = G B 5BH 2.2.2-18
La ecuación 2.2.2-16 a 2.2.2-18 representa la ecuación de movimiento.
2.3
La ecuación de Navier
Para la deducción de la ecuación de Navier partiremos de la 2da ley de Newton la cual se puede escribir de la forma:
B I,
BJI + , = G
B 5,
BH 2.3-1
La forma generalizada de la ley de Hooke en notación indicial se define como sigue.
,+= K IIL,++ 2N ,+ 2.3-2
El tensor de deformaciones infinitesimales de Cauchy se define de la siguiente manera
,+=12 PB5BC, ++
B5+
BC,Q 2.3-3
Si substituimos el tensor de deformaciones infinitesimales en la forma generalizada de la ley de Hooke se tiene lo siguiente:
,+= K12 RB5BCI I +
B5I
BCIS L,++ 2N
1
2 PB5BC+,+
B5+
BC,Q 2.3-4
Reduciendo términos
,+= K RB5BCI
IS L,++ N P
B5,
BC++
B5+
BC,Q 2.3-5
Si ponemos la expresión anterior en términos de TU
I, = K PB5BC+
+Q LI,+ N R
B5I
BC, +
B5,
BCIS 2.3-6
B I,
BJI = K P
B 5+
BC+BCIQ LI,+ N P
B 5I
BC,BCI+
B 5,
BCIBCIQ 2.3-7
Ahora si substituimos la ecuación 2.3-7 en la ecuación 2.3-1
K PBCB 5+
+BCIQ LI,+ N P
B 5I
BC,BCI+
B 5,
BCIBCIQ + V, = G
B 5,
BH 2.3-8
Desarrollando la expresión se tiene que
K PBCB 5+
+BCIQ LI,+ N
B 5I
BC,BCI+ N
B 5,
BCIBCI+ V, = G
B 5,
BH 2.3-9
Agrupando en función de K y N y ya que LI, = 1 si T = U
(K + N)BCB 5I
,BCI+ N
B 5,
BCIBCI+ V,= G
B 5,
BH 2.3-10
La expresión anterior corresponde a la ecuación de Navier la cual puede ser expresada de la siguiente manera también.
(K + N)∇(∇ ∙ 5) + N∇ 5 + V = GB 5BH 2.3-11 Pero existe una identidad del cálculo vectorial que corresponde a lo siguiente:
WXY = W(W ∙ Y) − WZ(WZY)
Entonces en general podemos expresar la ecuación de Navier de la siguiente manera:
(K + 2N)∇(∇ ∙ 5) − N∇C(∇C5) + V = GB 5BH 2.3-12
2.4
La ecuación de onda
Para llegar a la ecuación de onda hemos de partir de una identidad fundamental que es la identidad de Helmholtz la cual se puede enunciar de la siguiente manera: el desplazamiento de un material esta expresado como la suma del gradiente del potencial escalar [ y el rotacional del vector potencial \.
5 = ∇[ + ∇C\ 2.4-1
Se tiene también del cálculo vectorial la siguiente identidad:
]XY = ](] ∙ Y) − ]Z(]ZY)
Aplicando ambos conceptos a la ecuación de Navier se llega a la siguiente expresión
∇ PGB [BH − (K + 2N)∇ [Q + ∇C PGB \BH − N∇ \Q = 0 2.4-2
Podemos ver que la ecuación 2.4-2 se satisface si los potenciales [ y \ satisfacen las siguientes ecuaciones.
B [
BH = ^ ∇ [ 2.4-3 B \
BH = _ ∇ \ 2.4-4
A estas dos ecuaciones se le conoce como la ecuación de onda para una dimensión, donde las constantes ^ y _ están definidas por
^ = RK + 2NG S / _ = RNGS /
La ecuación de onda para una dimensión se puede definir como:
B 5
BH = ^ B 5BC 2.4-5
La cual es una ecuación diferencial parcial de segundo orden con una variable dependiente 5 y dos variables independientes H y C. Y el término ^ es una constante. Esta ecuación tiene la propiedad de que su solución general puede ser obtenida en términos de las variables independientes
a = C − ^H y b = C + ^H. Esto es la variable dependiente 5 puede ser expresada también como función de las variables H y C o de las variables a y a:
Al usar la regla de la cadena, podemos escribir la derivada parcial de 5 con respecto a H como:
B5
BH =BaBHB5cBa +BbBHB5cBb = −^B5cBa + ^B5cBb 2.4-7
Entonces al aplicar la regla de la cadena nuevamente
B 5
BH =BH R−^B B5cBa + ^B5cBbS B 5
BH =BaBHBa R−^B B5cBa + ^BbS +B5c BbBHBb R−^B B5cBa + ^B5cBbS B 5
BH = ^ PB 5cBa − 2BaBb +B 5c B 5cBb Q
La segunda derivada parcial de 5 con respecto a C en términos de las derivadas con respecto a a y
a pueden ser obtenidas de la misma manera. El resultado es:
B 5
BC =B 5cBa + 2BaBb +B 5c B 5cBb 2.4-8
Substituyendo estas dos expresiones en la ecuación 2.4-5 obtenemos la ecuación de onda para una dimensión de la forma.
B 5c
BaBb = 0 2.4-9
Podemos integrar 2 veces esta ecuación para obtener su solución general. Integrando con respecto a b, obtenemos:
B5c
Ba = ℎ(a) 2.4-10
Donde ℎ(a) es una función arbitraria de a. Entonces si integramos esta ecuación con respecto a a, obtenemos la solución.
5 = / ℎ(a)1a + e(b) 2.4-11
V(a) = / ℎ(a)1a 2.4-12 Podemos escribir la solución en la forma.
5 = V(a) + e(b) 2.4-13
Donde V(a) y e(b) son funciones arbitrarias derivables dos veces. A esto se le llama la solución de d’Alembert de la ecuación de onda de una dimensión. Consideremos que la función V(a) =
V(C − ^H) y supongamos que en un tiempo particular H la gráfica de la función V(C − ^H ) es descrita por la curva en la Figura 5(a). Nuestro objetivo es mostrar que conforme el tiempo se incrementa la gráfica de la función V(a) como función de C permanece sin cambio en su forma, pero se traslada en la dirección positiva del eje C con velocidad ^
Figura 5 La función ( ) en el tiempo y
El valor de la función (Z − f ) a una posición particular Z es (Z − f ). La grafica de ( ) al tiempo > como se muestra en la figura 5(b). Su valor (Z − f ) a una posición Z es igual al valor (Z − f ) si Z − f = Z − f , o escrito de otra manera
C = C − ^(H − H ) 2.4-14
Esta expresión muestra que durante el intervalo de tiempo desde a H, la gráfica de la función
V(a) se traslada a una distancia f(H − ) en la dirección positiva del eje Z con una velocidad constante f. Usando el mismo argumento podemos mostrar que la gráfica de la función e(b) como función de Z se traslada en la dirección negativa de Z con velocidad constante f. El comportamiento de V(a) y e(b) coincide con nuestra noción intuitiva de onda.
Figura 6 Semi-espacio Elástico
Ahora debemos asumir que el movimiento del material está dado por el campo de desplazamiento.
5 = 5 (C , C , H) 5 = 0 5 = 5 (C , C , H)
De este modo el movimiento es en dos dimensiones, y no depende del marco de referencia normal al plano en la Figura 6, y la componente de desplazamiento normal al plano es cero. Este tipo de movimiento es llamado, deformación de un plano. Usando la descomposición de Helmholtz podemos expresar las componentes de desplazamiento en términos de dos potenciales escalares.
5 =BC −B[ B\BC 2.4-15
5 =BC −B[ B\BC 2.4-16
Donde [ = [(C , C , H) y \ = \ (C , C , H). El escalar \ es la componente C del vector de potencial \. Para simplificar nuestra notación, quitaremos el subíndice 2 y escribiremos el escalar
\ como \.
Entonces los potenciales [ y \ son gobernados por la ecuaciones
B [
BH = ^ (B [BC +B [BC ) 2.4-17
B \ BH = _ (
B \ BC +
B \
BC ) 2.4-18
Donde las velocidades de la onda de compresión y de corte ^ y _ están definidas en términos de las constantes de Lamé K y _ y la densidad G del material.
^ = RK + 2NG S / _ = RNGS /
2.5
Ondas de interfase
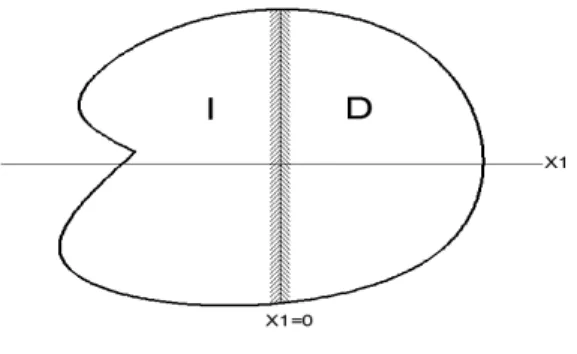
Hemos mostrado que en un sólido que no posee fronteras pueden existir 2 tipos de ondas las ondas de compresión y las ondas de corte, pero en un material que posee una frontera con otro material ya sea liquido o solido se presentan otros tipos de ondas. Supongamos que tenemos dos materiales elásticos unidos como en la Figura 7, llamemos al material que se encuentra a la izquierda I y al material que se encuentra a la derecha D. La interfase entre los dos materiales se encuentra en J1 = 0 .
Figura 7 Dos semi-espacios de un material elástico unidos
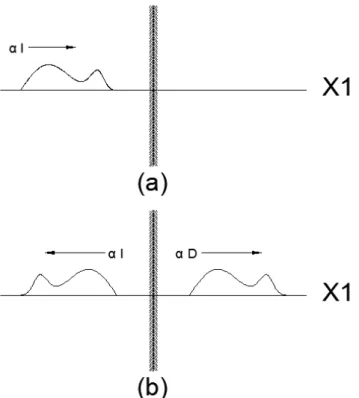
Figura 8 (a) Onda incidente. (b) Onda refractada y difractada.
Todos los objetos tienen fronteras (superficies). Este hecho modifica fuertemente el comportamiento de las ondas elásticas en todo el volumen y también resulta en un nuevo fenómeno ondulatorio cerca de las superficies.
Uno de los efectos de las fronteras sobre las ondas es familiar a nuestra experiencia diaria de la refracción y difracción de la luz. Estos efectos nacen por las diversas condiciones que deben de ser satisfechas en la frontera (frecuentemente se asume suave pero en realidad es rígida). Para las ondas elásticas, estas dependen en la naturaleza de la interfase mecánica entre los dos materiales en contacto existen cuatro posibilidades (24).
i. Si un sólido está en contacto con el vacío, la superficie debe de estar libre de esfuerzo. ii. Si un sólido está en contacto con un fluido, el esfuerzo cortante en la interfase debe ser
cero (los fluidos no soportan esfuerzos cortantes) pero la componente normal del esfuerzo debe ser continua.
iii. Si dos solidos están unidos firmemente, el movimiento de las partículas en la superficie de los dos materiales deben ser iguales; el esfuerzo en las superficies de los dos materiales está dado por la relación de sus impedancias elásticas mecánicas G., donde G es la densidad y . es la velocidad de la onda elástica.
2.6
Ondas de Rayleigh
Las ondas elásticas superficiales fueron descubiertas por lord Rayleigh en 1885. En un medio elástico infinito, las ondas de compresión y de corte (Ondas P y S respectivamente) son independientes y se propagan con diferentes velocidades, pero en las ondas superficiales las ondas de compresión y de corte se encuentran “acopladas”. Las ondas superficiales también difieren de las ondas P y de las ondas S en su velocidad de propagación. La onda de Rayleigh es alrededor de 5 a 13% menor en velocidad en relación a la onda de compresión (25). La velocidad depende principalmente de la relación de Poisson (26). En el problema de propagación bidimensional que contiene una superficie libre, las ondas de Rayleigh son más dominantes que las ondas P ó S. Esto es debido al movimiento retrograda natural de las ondas de Rayleigh. Este tipo de movimiento es la causa principal de tantos daños (por ejemplo los movimientos sísmicos). Una característica muy importante en las ondas de Rayleigh es que toda la energía está localizada cerca de la superficie libre a una profundidad cercana de una longitud de onda.
2.7
Ondas de Stoneley
En 1924, Stoneley encontró teóricamente que en una interfase entre dos sólidos en perfecto contacto puede existir una onda de interfase elástica localizada. Este tipo de onda desde entonces ha sido llamado la onda de Stoneley. (4) La naturaleza de la onda es similar a la onda de Rayleigh que se propaga a través de una superficie libre. En trabajos posteriores (27), se ha demostrado que solo una rara combinación, de densidades y propiedades elásticas de los dos medios, permiten la aparición de una onda de propagación de Stoneley, en la mayoría de los casos la onda de Stoneley se “pierde” debido a que su velocidad es más grande que la velocidad de las ondas de corte de uno de los semiespacios, de este modo al propagarse la onda de Stoneley esta decae exponencialmente.
2.8
Ondas de Scholte
3.
El Método Indirecto de Elementos Frontera
3.1
Generalidades del método
Para los tres modelos de interfase estudiados en este trabajo, el estado resultante de tracciones, desplazamientos y presiones en cualquier punto de los modelos se puede expresar como la suma de un campo incidente y uno difractado. Todos los modelos de la interfase, el vacío-sólido, sólido-sólido, líquido-sólido-sólido, son considerados como la unión de dos espacios o regiones. La fuente se genera, en la región donde actúa, un campo incidente de tracciones y desplazamientos para el fluido o un campo incidente de tracciones y el desplazamiento de los sólidos. En la región donde la fuente no se aplica solamente campos difractados son esperados.
Para el caso de una interfase líquido-sólido utilizando una fuente en el fluido, que fue representada por una función de Hankel de segunda clase y de orden cero, esta. Sin embargo, con el propósito de hacer comparaciones entre los tres modelos de interfase, la fuente se aplica en el sólido h1, como se muestra en la figura 9.
Figura 9 Modelos canónicos interfase que se deben resolver por medio del Método Indirecto de Elementos Frontera. a) La interfase vacío-sólido, b) la interfase sólido-sólido, y c) de la interfase líquido-sólido.
Por lo tanto, para cada modelo, el campo total de la región h1 se puede expresar como
56$(Z) = 5ij$
(Z) + 5kj$
(Z) 3.1-2
Para los desplazamientos. Las regiones S y F sólo tienen campos difractados de onda, porque no hay fuentes se aplican en esas regiones. Los superíndices l y 1 representan el campo de la onda incidente y el campo de la onda difractada, respectivamente.
3.2
Representaciones integrales
El campo de onda difractada de desplazamientos y tracciones para el sólido elástico S 1 puede expresarse por medio de:
5,kj$(Z) = / m,+6$(Z, a)[+6$(a)1hn <6$
3.2-1
Y
H,kj$
(Z) = . [,6$(C) + / ,+6$(Z, a)
<6$ [+
6$
(a)1hn 3.2-2
Donde
u
i( )
x
representa la componente i-esimadel desplazamiento en el puntox
,G
ij( )
x;
ξ
representa la función de Green, que es el desplazamiento producido en la direccióni enx
debido a la aplicación de una fuerza unitaria en la dirección j en el punto ξ yφ
j( )
ξ
es ladensidad de fuerza en la dirección j en el punto p ξ . Esta representación integral puede obtenerse a partir de la identidad de Somigliana (30).
t
i( )
x
es la i-ésima componente detracción,,
c
1=
0
.
5
six
tiende a la frontera S "desde adentro" de la región,c
1=
−
0
.
5
six
tiende a la región S "desde fuera" de la región yc
1=
0
six
no está en S, lo cual se ilustramejor en la
T
ij( )
x;
ξ
es la función de tracción de Green, es decir, la tracción en la dirección i en un puntox
, asociado al vector ni(x), debido a la aplicación de una fuerza deFigura 10 Definición grafica de c en un semiespacio y dos semiespacios
Para la región F (líquido en la Figura 9 (c)), los campos difractados para desplazamientos y presiones se escriben como:
5ko(Z) = . \(Z) + 1 Gpq /
Bmp(Z, a)\(a)1h n B
<p
3.2-3
rko(C) = / mp(Z, a)\(a)1hn <p
3.2-4
donde,
mp(C, a) =Gq
4U t( )(qu.p) 3.2-5
( )
•Ψ Representa la densidad de fuerza para el fluido, F
( )
•G es la función de Green para el fluido, y . define la orientación de la región y puede tener un valor de -0,5, 0 o 0,5 (véase la explicación de c1 , citado más arriba). G es la densidad de masa y q representa la frecuencia circular, y t( ) es la función de Hankel de Segundo tipo y orden cero .
3.3
Funciones de Green para espacios completos
En un medio isotrópico, elástico, y sin fronteras, el tensor de Green bidimensional es el responsable de los desplazamientos y tracciones, si en cierta localización C se aplica una carga unitaria que se encuentra a lo largo de una línea en a. Las expresiones exactas del tensor de Green se proporcionan a continuación
m,+(C; a) = L,+− {(2|,|+− L,+) 3.3-1
De otra manera, las tracciones en C en la dirección de U para cierto vector unitario , normal a h. Cuando la carga unitaria es aplicada a a en la dirección y puede ser expresada como:
,+=Nu }~−4 { + K•(qu/^)2N^ € |+ ,+ ~−4{ +•(qu/_)2_ € × ‚|, ++ |I IL,+ƒ„ +Nu …(† + 16{)|,|+|I Iˆ
3.3-2
Para las ecuaciones anteriores definiremos
=U8G 1 t( )(qu/^)^ +t( )(qu/_)_ ! 3.3-3
{ =U8G 1 t( )(qu/^)^ +t( )(qu/_)_ ! 3.3-4
† =•(qu/^)2^ −•(qu/_)2_ 3.3-5
•(r) =2G rtU ( )(r) 3.3-6
Donde K y N son las constantes de Lamé, G es la densidad, ^ = Š(K + 2N)/G y _ = ŠN/G son las velocidades de las ondas P y S respectivamente, u = Š(C − a ) + (C − a ) , |+= 'C+− a+(/u,
L,+ es la delta de Kronecker (1 -U U = y, 0 -U U ≠ y) y tŒ( )(∙) es la función de Hankel de segundo
3.4
Casos de estudio
3.4.1
Planteamiento del problema
Desde el primer sismograma sintético calculado por Lamb (1904) de han sentado las bases para calcular sismogramas. Con el avance vertiginoso de la tecnología en computación se ha podido acceder a técnicas discretas de cálculo que permiten obtener sismogramas más precisos. Bouchon y Aki. K. (31) propusieron el cálculo de sismogramas sintéticos utilizando la suma de ondas planas homogéneas e inhomogéneas para obtener señales en tiempo. El problema de propagación de ondas en un medio estratificado ha sido ampliamente estudiado (ver por ejemplo Kennett, 1983 (32)). En este contexto se puede enunciar que el objetivo principal de este trabajo consiste en calcular sismogramas sintéticos para 3 modelos canónicos de interfase es decir Vacío-Solido, Solido-Solido y Fluido-Vacío-Solido, en los cuales las sustancias de las cuales están compuestas estas interfases se consideran lineales, isótropas y homogéneas
3.4.2
Condiciones de frontera
Las condiciones de contorno para cada uno de los modelos presentados en la Figura 9 se establecen como sigue:
Interfase Vacío – Sólido
H,6$
(Z) = 0, ∀Z ∈ Bh 3.4.2-1
Esta condición de frontera establece que todos las tracciones o esfuerzos entre la interfase Vacío-Sólido son cero ya que no existe interacción con ninguna substancia.
Interfase Sólido - Sólido
H,6$
(Z) = H,6%(Z), ∀Z ∈ Bh , Bh 3.4.2-2
5,6$(Z) = 5,6%(Z), ∀Z ∈ Bh , Bh 3.4.2-3
Interfase Fluido – Sólido
5p(Z) = 56$
(Z), ∀Z ∈ Bh , B 3.4.2-4
H6$
(Z) = 0, ∀Z ∈ Bh 3.4.2-5
H6$
(Z) = −rp, ∀Z ∈ Bh , B 3.4.2-6
En esta interfase se establece que no existe traccion horizontal en el sólido y la traccion Vertical del sólido debe de ser igual a la presión del fluido, ademas de que el desplazamiento vertical tanto en el fluido como en el solido debe ser el mismo.
Figura 11 Condiciones de frontera para las tres interfases
3.4.3
Discretización del dominio
Para la interfase formada por Vacío solido caso (a) de la Figura 9 se tiene de manera análoga que la condición de frontera 3.4.2-1 debe ser respetada en toda la frontera entonces la suma del campo difractado e incidente debe establecerse como:
H,k•(Z) + H,i•(Z) = 0 3.4.3-1
O como
H,k•(Z) = −H
,i•(Z), ∀C ∈ Bh 3.4.3-2
Entonces la representación integral de la ecuación para la interface Vacío-Solido se define de la siguiente manera:
. [,6 (Z) + / ,+6 (Z, a)
<6$ [+
6 (a)1h
n=−H,ij (Z), ∀C ∈ Bh 3.4.3-3
En general podemos decir que el campo total de desplazamiento y tracciones puede ser expresado como la suma de un campo incidente y uno difractado “o” y “d” respectivamente, el procedimiento de discretización para las ecuaciones correspondientes a la interfase de la Figura 9 (b) se ilustra, tal interfase está relacionado con la aparición y propagación de las ondas de Stoneley, que existen en la interfase entre dos sólidos elásticos. Luego, a partir de las ecuaciones de continuidad 3.4.2-2 y 3.4.2-3 se puede decir que los estados de tracción y el desplazamiento se puede expresar, respectivamente, como:
H,ij$
(Z) + H,kj$(Z) = H,kj%(Z), ∀Z ∈ Bh , Bh 3.4.3-4
Y
5,ij$(Z) + 5,kj$(Z) = 5,kj%(Z), ∀Z ∈ Bh , Bh 3.4.3-5
Reordenando estas dos ecuaciones se tiene entonces que:
H,ij$(Z) − H,kj%(Z) = −H,ij$(Z), ∀Z ∈ Bh , Bh 3.4.3-6
Y
5,kj$(Z) − 5,kj%(Z) = −5,ij$(Z), ∀Z ∈ Bh , Bh 3.4.3-7
. [,6$(Z) + / ,+6$(Z, a)
<6$ [+
6$(a)1h
n− . [,6%(Z) − / ,+6%(Z, a)
<6% [+
6%(a)1h
n= −H,ij$(Z), ∀C ∈ Bh , Bh
3.4.3-8
Y
/ m,+6$
(Z, a)[+6$(a)1hn
<6$ − / m,+
6%
(Z, a)[+6%(a)1hn
<6% = −5,
ij$
(Z), ∀C ∈ Bh , Bh
3.4.3-9
Donde H,ij$ y 5,ij$ representan, respectivamente, los campos de esfuerzo y desplazamiento producidos por la fuente, ambos aplicados a la región h .
En general, la interfase entre dos solidos puede ser discretizada de acuerdo al siguiente esquema:
Figura 12 Mallado de los elementos frontera
Para el caso de la interfase Fluido-Sólido se tiene que de acuerdo a las condiciones de frontera
3.4.2-4, 3.4.2-5, 3.4.2-6 , que hacen referencia a los desplazamientos y tracciones en la interfase
Fluido-Sólido, tenemos que la fuente se va a colocar en el sólido solo tenemos un campo de presión difractada como se puede observar en la ecuación 3.2-4 y un campo de desplazamiento difractado como se puede observar en la ecuación 3.2-3 . El desplazamiento en el sólido en este caso se define como:
/ m,+6$(Z, a)[+6$(a)1hn
<6$ = 5,
kj$
(Z), ∀C ∈ Bh 3.4.3-10
Y el campo de tracciones para el sólido se define como:
. [,6$(Z) + / ,+6$(Z, a)
<6$ [+
6$(a)1h
n= H,kj$(Z), ∀C ∈ Bh 3.4.3-11
5kj$
(Z) − 5ko
(Z) = −5ij$
(Z), ∀Z ∈ Bh , 3.4.3-12 La representación integral de esta ecuación se define como:
/ m6+$
(Z, a)[+6$
(a)1hn
<6$ − . \(Z) −
1 Gpq /
Bmp(Z, a)\(a)1hn
B
<p = −5
ij$ 3.4.3-13
También se tiene que la condición de tracción horizontal cero se puede expresar de la siguiente manera.
Hk•
(Z) = 0, ∀Z ∈ Bh 3.4.3-14 Con su forma integral definida como:
. [6$
(Z) + / 6+$(Z, a)
<6$ [+
6$
(a)1hn= 0,∀Z ∈ Bh1 3.4.3-15 La tercera condición de frontera se puede expresar como:
Hk•(Z) + rko= −Hi•(Z)∀Z ∈ Bh , 3.4.3-16 En su forma integral se define como:
. [6$(Z) + / + 6$(Z, a)
<6$ [+
6$(a)1hn+ / m (Z,a)\(a)1ha
B = −H3
l-(Z)∀Z ∈ Bh1, 3.4.3-17
3.4.4
Sistema de ecuaciones integrales
Si se asume que las densidades de fuerza [,(C) son constantes para cada elemento del solido S y la integración Gaussiana es realizada (o la integración analítica donde la función de Green es singular), se tiene entonces que la ecuación 3.4.3-3 puede describirse como:
’ [+6$
(a )H,+6$
“
”
(Z•, a ) = −H,ij$(Z•), – = 1, — 3.4.4-1
’ [+6$(a )H,+6$ “
”
(Z•, a ) − ’ [+6%(a )H,+6% “
”
(Z•, a ) = −H,ij$(Z•), – = 1, — 3.4.4-2
Y
’ [+6$
(a )e,+6$ “
”
(Z•, a ) − ’ [+6%(a )e,+6% “
”
(Z•, a ) = −5,ij$(Z•), – = 1, — 3.4.4-3
Donde:
H,+(Z•, a ) = . L,+L˜ + / ,+ ™6š
(Z•, a )1hn 3.4.4-4
Y
e,+(Z•, a ) = / m,+ ™6š
(Z•, a )1hn 3.4.4-5
Donde L,+ representa a la delta de Kronecker y Δh es la longitud de cada elemento frontera Las ecuaciones 3.4.4-2 y 3.4.4-3 representan el sistema de Fredholm de ecuaciones integrales que han de resolverse. Una vez que las incógnitas son resueltas, es posible determinar el estado de tracciones y desplazamientos en cualquier punto de las regiones h y h usando las ecuaciones
3.2-1 y 3.2-2, además del campo de onda incidente.
En el caso de la interfase Fluido-Solido se tiene que si se considera que las densidades de fuerza
ϕ•(x) y ψ•(x) son constantes en cada uno de los elementos de la frontera se tiene que el sistema
de ecuaciones integrales queda formado como:
’ [+6 (a )e + 6 “
”
(Z•, a ) − ’ \+p (a ) “
”
T = −5ij
(Z•), – = 1, — 3.4.4-6
’ [+6$(a )H6+ “
”
(Z•, a ) = 0, – = 1, — 3.4.4-7
’ [+6 (a )H6+ “
”
(Z•, a )+’ \+6 (a )ep “
”
Con
e,+(Z•, a ) = / m,+ ™6š
(Z•, a )1hn 3.4.4-9
Y
T = . L,+L˜ / Bm
p(Z, a)\(a)1h n
B
<p
3.4.4-10
El sistema de ecuaciones para la interface Vacío-Sólido puede ser descrito de manera adecuada de acuerdo a la ecuación 3.4.3-3 el cual se muestra en la Figura 13, las densidades de fuerza son las incógnitas a resolver para conocer los campos de desplazamientos y tracciones en el sólido, podemos observar que el sistema de ecuaciones resultante es de 2Nx2N (N=cantidad de elementos frontera)
Figura 13 Sistema de ecuaciones a resolver para la interface Vacío-Sólido.
Figura 14 Sistema de ecuaciones a resolver para la interface solido-solido
Para la interfase Fluido-Solido el sistema de ecuaciones descrito en 3.4.3-13, 3.4.3-15 y 3.4.3-17 puede ser descrito de la manera que se observa en la Figura 15 , donde se puede observar que el sistema a resolver posee 3Nx3N ecuaciones, donde las incógnitas son las densidades de fuerza de; fluido y del solido respectivamente, para conocer los campos de desplazamientos y tracciones de la interfase.
Figura 15 Sistema de ecuaciones a resolver para la interfase Fluido-Sólido
Figura 16 Diagrama de flujo del programa computacional para resolver el sistema de ecuaciones integrales.
3.5
La Transformada Discreta de Fourier
Consideremos una secuencia Cc( ) que es periódica con periodo N, de forma que Cc( ) = Cc( +
T—) para cualquier valor entero de k. Es posible representar a Cc( ) en términos de series de Fourier, esto es, por sumas de secuencias de senos y cosenos, o equivalentemente por secuencias de exponenciales complejas, con frecuencias que son múltiplos enteros de la frecuencia fundamental 2 ¡— asociada con la secuencia periódica. En contraste con las series de Fourier de funciones periódicas continuas, existen solamente — distintas exponenciales complejas que tienen un periodo que es un submúltiplo entero del periodo fundamental —. Esto es una consecuencia del hecho de que la exponencial compleja
I( ) = +¢
%£
¤¥ I 3.5-1
Es periódica en T con un periodo de —. Así, ( ) = “( ), ( ) = “¦ ( ), etc., y consecuentemente el conjunto de N exponenciales complejas en la ecuación (22) con T =
0,1,2, … . , — − 1 definen todas las exponenciales complejas distintas con frecuencias que son un múltiplo entero de ©
“. Así la representación en series de Fourier de una secuencia periódica,
Cc( ), necesita contener solo — de estas exponenciales complejas y por esta razón tiene la forma
Cc( ) =— ’ J1 ª(T) +¢%£¤¥ I
“«
I”
3.5-2
La constante multiplicativa
“ ha sido incluida por conveniencia y, por supuesto, no tiene un efecto
importante sobre la naturaleza de la representación. Para obtener los coeficientes Jª(T) a partir de la secuencia periódica Cc( ), se usa el hecho de que:
1
— ’ +¢
%£ ¤¥ I
“«
I”
= ¬1, r-u- u = •—,0 1 lHul •l1l1l 1 • - 5 H ul 3.5-3
Por lo tanto multiplicando ambos lados de la ecuación 3.5-2 por «+¢%£¤¥ ® y sumando de n=0 hasta
— − 1, se obtiene
’ Cc( ) «+¢%£¤¥ ®
“«
”
= ’ — ’ J1 ª(T) +¢%£¤¥(I«®)
“«
”
!
“«
”
Y usando la ecuación 3.5-3
’ Cc( ) «+¢%£¤¥ ®
“«
”
Por lo que los coeficientes Jª(T) de la ecuación 3.5-2se obtienen de la relación
Jª(T) = ’ Cc( ) «+¢%£¤¥ I
“«
”
3.5-4
Nótese que la secuencia Jª(T) dada por la ecuación 3.5-4 es periódica para un periodo de N; esto es, Jª(0) = Jª(—), Jª(1) = Jª(— + 1), etc. Esto es consistente por supuesto, consistente con el hecho de que las exponenciales complejas de la ecuación 3.5-1 son solamente distintas para
T = 0,1, … , — − 1 de este modo solo puede haber — coeficientes distintos en la representación en series de Fourier de una secuencia periódica.
Las ecuaciones 3.5-2y 3.5-4juntas pueden ser vistas como un par de transformación y se refieren como la representación en series discretas de Fourier (SDF) de una secuencia periódica. Por conveniencia en la notación de estas ecuaciones generalmente se escriben en términos de ¯“ definido como:
¯“= «+¢
%£ ¤¥
De esta forma el par de SDF de análisis y síntesis queda expresado como:
Jª(T) = ’ Cc( )¯“I “«
”
3.5-5
Cc( ) =— ’ J1 ª(T)¯“«I “«
I”
3.5-6
Una secuencia periódica puede ser representada por series de Fourier. Con la correcta interpretación, la misma representación puede ser aplicada a secuencias de duración finita. La representación de Fourier resultante para secuencias de duración finita es lo que se conoce como la transformada discreta de Fourier (TDF).
Se puede representar una secuencia de duración finita de largo — por una secuencia periódica con periodo —, un periodo de la cual es idéntica a la secuencia de duración finita.
Cc( ) = ’ C( + u—)
²
®”«²
3.5-7
Dado que C( ) es de largo finito — no hay sobrelapamiento entre los términos C( + u—) para valores diferentes de u. Así, la ecuación 3.5-7 puede ser escrita alternativamente como:
Cc( ) = ’ C( %—)
²
®”«²
3.5-8
Donde % indica la operación modulo. La secuencia de duración finita C( ) es obtenida a partir de
Cc( ) extrayendo un periodo:
C( ) = }Cc( ),0, 1 lHul •l1l0 ≤ ≤ (— − 1)
Por conveniencia en la notación, es útil definir la secuencia rectangular ´“( ) dada por
´“( ) = }1,0, 1 lHul •l1l0 ≤ ≤ (— − 1)
Con esta notación la ecuación de arriba puede escribirse como:
C( ) = Cc( )´“( )
Se sabe que los coeficientes de las series de Fourier discreta Jª(T) de la secuencia periódica Cc( ) son en sí mismas una secuencia periódica con periodo —. Para mantener una dualidad entre los dominios del tiempo y frecuencia, se escogerán los coeficientes de Fourier que se asocian con la secuencia de duración finita correspondiente a un periodo de Jª(T). Así, con J(T) denotando los coeficientes de Fourier que se asocian con C( ), J(T) y Jª(T).están relacionados por
Jª(T) = J(T%—) J(T) = Jª(T)´“(T)
Se sabe que Jª(T) y Cc(T) están relacionadas por
Jª(T) = ’ Cc( )¯“I “«
” 3.5-9
Cc(T) =— ’ J1 ª( )¯“«I “«
”
3.5-10
J(T) = µ’ Cc( )¯“I “«
”
, 0 ≤ T ≤ N − 1 0, 1 lHul •l1l
3.5-11
C(T) = µ— ’ J(T)¯1 “«I , 0 ≤ ≤ — − 1 “«
I”
0, 1 lHul •l1l
3.5-12
El par de transformadas dadas por las ecuaciones 3.5-11 y 3.5-12se conocen como la transformada discreta de Fourier (TDF), con la ecuación 3.5-11 representando la transformada de análisis y la ecuación 3.5-12 la transformada de síntesis.
Para entender el mecanismo de la TDF consideremos una serie discreta de — = 2· puntos. Si dividimos la serie de — puntos en dos en otras palabras —/2 secuencias de puntos V ( ) y V ( ) correspondientes a los muestras de números nones y a los números pares respectivamente esto es:
V ( ) = C(2 )
V ( ) = C(2 + 1), = 0,1, … . . ,—2 − 1
Entonces V ( ) y V ( ) son obtenidas al reducir C( ) sobre un factor de 2, en consecuencia el algoritmo de TDF resultante es llamado eliminación en tiempo. Ahora la TDF de — puntos puede ser expresada en términos de la eliminación de tiempo es como sigue:
J(T) = ’ C( )¯“I “«
”
= ’ C( )¯“I ¸¹®
+ ’ C( )¯“I i
= ’ C(2•)¯“ŒI
¤ %«
Œ”
+ ’ C(2• + 1)¯“ŒI
¤ %«
Œ”
Pero ¯“ = ¯“/ . Con esta substitución, la ecuación puede ser expresada como:
J(T) = ’ V (•)¯¤ %
IŒ
¤ %«
Œ”
+ ’ V (•)¯¤ %
IŒ
¤ %«
Œ”
= (T) + ¯“I (T), T = 0,1, … , — − 1
Donde (T) y (T) son los “ puntos de la transformada discreta de Fourier de las secuencias
¢T + “¥ = (T) y ¢T + “¥ = (T) . Además tenemos que el factor ¯“I¦ ¤ % = −¯
“I.
Entonces la ecuación puede ser expresada como:
J(T) = (T) + ¯“I (T), T = 0,1, … ,—
2 − 1 J RT +—2S = (T) − ¯“I (T), T = 0,1, … ,—2 − 1
Podemos observar que el cálculo directo de (T) requiere ¢“¥ multiplicaciones complejas. Lo mismo aplica para el cálculo de (T). Además se necesitan “ multiplicaciones complejas adicionales para calcular ¯“I (T). Por lo tanto el cálculo de J(T) requiere 2 ¢“¥ +“=“%+“ multiplicaciones complejas. Este primer paso resulta en la reducción del número de multiplicaciones de — a “%+“, el cual está cerca de un factor de 2 para un largo de —.
Al calcular “
º puntos de la transformada discreta de Fourier, obtendremos “ puntos de la
transformada discreta de Fourier (T) y (T) de las relaciones.
(T) = "V (2 )# + ¯¤ %
I "V (2 + 1)#, T = 0,1, … ,—
4 − 1, = 0.1 … ,—4 − 1 RT +—4S = "V (2 )# − ¯¤
%
I "V (2 + 1)#, T = 0,1, … ,—
4 − 1, = 0.1 … ,—4 − 1 (T) = "V (2 )# + ¯¤
%
I "V (2 + 1)#, T = 0,1, … ,—
4 − 1, = 0.1 … ,—4 − 1 RT +—4S = "V (2 )# − ¯¤
%
I "V (2 + 1)#, T = 0,1, … ,—
4 − 1, = 0.1 … ,—4 − 1
La eliminación de la secuencia de datos puede ser repetida una y otra vez hasta que las secuencias resultantes sean reducidas a secuencias de un punto. Para — = 2·, esta eliminación puede ser realizada 9 = –le — veces. Aunque el número de multiplicaciones complejas es reducido a
(“)–le — \, y el número de sumas complejas es —–le —.
Figura 18 Tres etapas en el cálculo de la TDF de 8 puntos
4
Ejemplos Numéricos
4.1 Selección de ejemplos numéricos
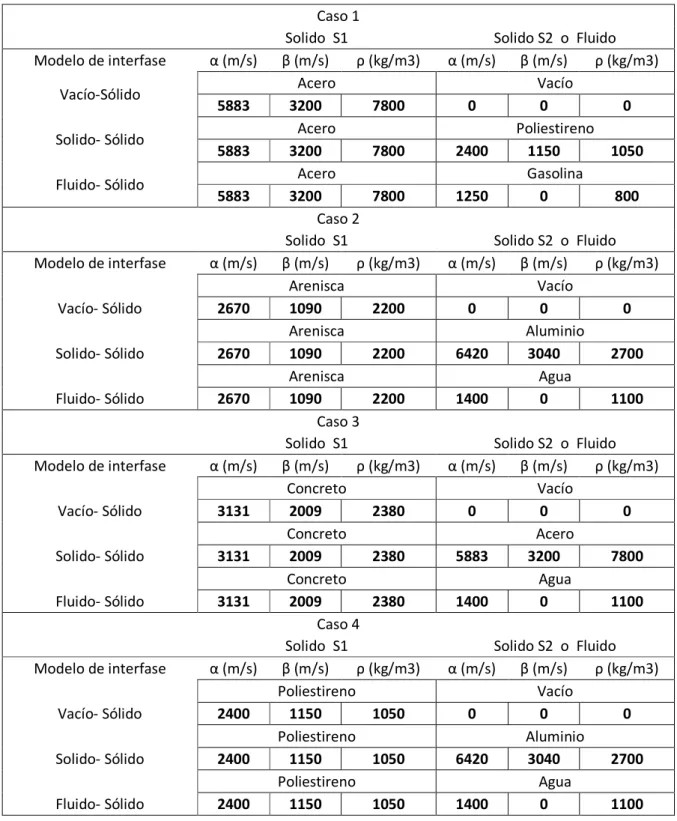
En esta sección, la simulación numérica para los tres modelos canónicos de interfase son desarrollados. Es importante mencionar que para los tres casos las interfases se consideran planas y sin ninguna discontinuidad de ningún tipo, debido a que el estudio de las discontinuidades en las interfases es motivo de otro estudio y requieren de una mayor complejidad. Las propiedades de los materiales que se utilizaron en el análisis se muestran en la siguiente Tabla 1, cabe mencionar que los materiales empleados en este análisis solo son representativos y no abarcan la gran cantidad de materiales empleados en la ingeniería.
Tabla 1 Propiedades de los materiales usados en las simulaciones numéricas
Caso 1
Solido S1 Solido S2 o Fluido
Modelo de interfase α (m/s) β (m/s) ρ (kg/m3) α (m/s) β (m/s) ρ (kg/m3)
Vacío-Sólido Acero Vacío
5883 3200 7800 0 0 0
Solido- Sólido Acero Poliestireno
5883 3200 7800 2400 1150 1050
Fluido- Sólido Acero Gasolina
5883 3200 7800 1250 0 800
Caso 2
Solido S1 Solido S2 o Fluido
Modelo de interfase α (m/s) β (m/s) ρ (kg/m3) α (m/s) β (m/s) ρ (kg/m3)
Arenisca Vacío
Vacío- Sólido 2670 1090 2200 0 0 0
Arenisca Aluminio
Solido- Sólido 2670 1090 2200 6420 3040 2700
Arenisca Agua
Fluido- Sólido 2670 1090 2200 1400 0 1100
Caso 3
Solido S1 Solido S2 o Fluido
Modelo de interfase α (m/s) β (m/s) ρ (kg/m3) α (m/s) β (m/s) ρ (kg/m3)
Concreto Vacío
Vacío- Sólido 3131 2009 2380 0 0 0
Concreto Acero
Solido- Sólido 3131 2009 2380 5883 3200 7800
Concreto Agua
Fluido- Sólido 3131 2009 2380 1400 0 1100
Caso 4
Solido S1 Solido S2 o Fluido
Modelo de interfase α (m/s) β (m/s) ρ (kg/m3) α (m/s) β (m/s) ρ (kg/m3)
Poliestireno Vacío
Vacío- Sólido 2400 1150 1050 0 0 0
Poliestireno Aluminio
Solido- Sólido 2400 1150 1050 6420 3040 2700
Poliestireno Agua
Para el caso de la interfase Vacío-Solido se realizaron las simulaciones bajo las siguientes condiciones que se muestran en la Figura 20,debemos resaltar que en este caso el Sólido S1 se considera un semi-espacio infinito por lo cual por debajo de la interfase solido vacío no existe frontera alguna, por lo cual no existe reflexión de ondas de ningún tipo, además se puede observar que la posición geométrica de la fuente es en origen y a una altura por debajo de esta de 0.1m, adicionalmente a la fuente se colocó una línea de 25 receptores sobre la interfase a una distancia horizontal de 2.0m de la fuente con una separación de 0.08m entre cada receptor, se consideró una interfase de longitud de 10.3 metros dividida en 250 elementos frontera
Figura 20 Condiciones para la simulación numérica de la interfase Vacío-Sólido.
Figura 21 Condiciones para la simulación para la interfase Sólido-Sólido.
Para la interfase Fluido-Sólido se tienen condiciones similares de simulación a los dos casos similares, de igual manera la fuente se colocó en el sólido S1 para tener una completa analogía completa con los otros dos sistemas, nuevamente se colocaron 25 receptores a una distancia horizontal de la fuente de 2.0 metros con un espaciamiento de 0.08 metros y también se simulo una frontera de 10.3 metros dividida en 250 elementos.