ESCUELA SUPERIOR DE INGENIERIA
MECÁNICA Y ELÉCTRICA
INTERPRETACIÓN DEL MOVIMIENTO HUMANO
POR SISTEMAS MICROELECTROMECÁNICOS
T E S I S
QUE PARA OBTENER EL TITULO DE
INGENIERO EN COMUNICACIONES Y ELECTRONICA
P R E S E N T A N
CAMACHO BARCENAS JUAN CARLOS
GEIJO DOMINGUEZ ANTONIO
ASESOR:
M. EN C. EDUARDO GABRIEL BALDERAS
Resumen... 3
Glosario técnico. ... 4
Objetivos. ... 8
Objetivo general. ... 9
Objetivos particulares. ... 10
Introducción. ... 11
I.1. Antecedentes sobre la importancia de la mano. ... 12
I.2. Problema. ... 12
I.3. Análisis y alcance. ... 12
I.4. Justificación. ... 12
Marco referencial ... 14
II.2. Interpretación del movimiento mediante sensores de aceleración. ... 16
II.2.i. Sensores. ... 16
II.2.ii. Microcontroladores. ... 17
II.2.iii. Sistema de comunicación digital. ... 18
II.2.iv. Motores de corriente directa. ... 19
Desarrollo del proyecto. ... 20
III.1. Aplicación del acelerómetro. ... 21
III.2. Manejo del microcontrolador ATmega8. ... 23
III.3. Transmisión y recepción de la señal. ... 41
III.4. Interpretación e implementación de la señal. ... 46
III.5. Diseño de los circuitos. ... 56
Resultados de desarrollo... 66
Justificación económica. ... 71
Conclusiones y Recomendaciones. ... 75
Consultas. ... 78
Resumen.
En el presente proyecto es sensado el movimiento humano de la muñeca de una persona, para el control de un pequeño vehículo electrónico.
Para ello se realiza un sistema electromecánico dirigido por tecnología MEMS, para realizar el sensado mecánico a electrónico.
Para lograr un óptimo desempeño en el funcionamiento del sistema se utiliza un par de microcontroladores ATmega8 que por sus características técnicas
resultaron ser adecuados.
Aceleración La aceleración es una magnitud vectorial, es decir, tiene un módulo y una dirección. El módulo define el "tamaño" que tiene la aceleración, mientras que la dirección define hacia donde apunta esa aceleración.
Memoria Flash Es un tipo de memoria interna permanente de algún dispositivo que puede ser borrada y reprogramada eléctricamente. Son denominadas no volátiles, ya que conservan los datos aún cuando no se encuentran conectadas a la corriente eléctrica.
.
Memoria EEPROM Son las siglas de Electrically-Erasable Programmable Read-Only Memory (ROM programable y borrable eléctricamente). Es un tipo de memoria ROM que puede ser programado, borrado y reprogramado eléctricamente. Son memorias no volátiles.
Microcontrolador Es un circuito integrado que incluye las tres unidades básicas de una computadora: unidad central de procesos (CPU), memoria y unidades de salida y entrada (I/O).
Receptor Un receptor es una persona o un equipo que recibe una señal, código o mensaje emitido por un transmisor.
Motor de C.D. El motor de corriente directa o continua es una máquina que convierte la energía eléctrica en mecánica, principalmente mediante el movimiento rotatorio.
Stack Pointer Apuntador de pila, se para señalar el último elemento de una pila, almacena direcciones de regreso después de interrupciones o llamadas a subrutinas. El apuntador de pila siempre señala la parte más alta de la pila de datos de la memoria SRAM.
Status Register Registro de estado, es el registro de un microcontrolador que contiene información acerca de las operaciones aritméticas realizadas más recientemente. Esta información puede ser utilizada para alterar el flujo del programa o realizar operaciones condicionales.
UART Por sus siglas en inglés "Universal Asynchronous Receiver-Transmitter" (en español, "Transmisor-Receptor Asíncrono Universal"). Es un dispositivo programable en el que se establecen las condiciones para la transmisión como los son: velocidad, paridad, longitud y bits de parada. Este controla los puertos y dispositivos serie.
VSWR (Voltage
Standing Wave
Ratio)
Objetivo general.
Objetivos particulares.
Conocer los procedimientos en la fisioterapia de rehabilitación para lesiones de la mano y muñeca.
Analizar el control de sistemas electromecánicos mediante sensores de aceleración.
I.1. Antecedentes sobre la importancia de la mano.
La a o es el le guaje de u hos ho res,
y el órga o i dispe sa le para asegurar su i depe de ia .
Manuel Blanco Arguelles, Médico rehabilitador.
La mano en cuanto anatomía y funcionalidad, se estudia integrada al miembro superior, el hombro permite orientar la extremidad superior en los tres planos del espacio (sagital, transversal y frontal).
I.2. Problema.
La fisioterapia resulta ser en la mayoría de los hospitales tediosa, la cual se agudiza en niños, que les es difícil mantenerse quietos por periodos largos de tiempo.
I.3. Análisis y alcance.
El trabajo se enfoca en un dispositivo de sensado general aplicado exclusivamente a la muñeca del individuo. Por lo que estrictamente nuestro alcance se limita a esta sección del cuerpo y a su aplicación.
I.4. Justificación.
ejercicios recomendados por los médicos especializados, sin la necesidad de asistir a las sesiones de fisioterapia en los hospitales.
II.1. Procedimientos de fisioterapia en extremidades superiores.
Existen diversos males dentro de la fisioterapia los cuales impiden un adecuado desarrollo articular. Algunos de ellos son:
Tetraplejía. Término que describe la disminución o pérdida de la función motora y/o sensitiva en los segmentos cervicales, debido a una lesión de los elementos neutrales dentro del canal medular. La tetraplejía se caracteriza por la disminución de la función de los brazos, tronco y piernas.
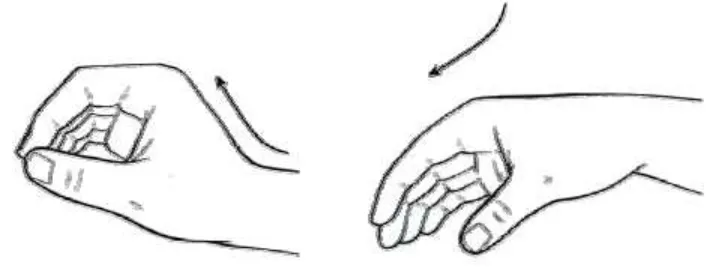
[image:17.612.128.484.424.558.2]La terapia para personas con tetraplejía consiste en preparar las extremidades superiores, en especial, las manos de la persona para que en la medida de lo posible recuperen su funcionalidad. Para lograr este fin hay que prevenir limitaciones articulares manteniendo las manos en posiciones determinadas que las favorezcan, como el uso intercalado de férulas, manoplas y rodillos, y mantener los balances articulares libres, figura II.1.1.
II.2. Interpretación del movimiento mediante sensores de aceleración.
II.2.i. Sensores.
Un sensor es un dispositivo capaz de transformar magnitudes físicas, llamadas variables de instrumentación, en magnitudes eléctricas. Las variables pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, pH, etc.
Características que debe cumplir un sensor:
Intervalo de medida: dominio en la magnitud medida en el que puede aplicarse el sensor.
Precisión: es el máximo error esperado en la medida.
Offset o desviación de cero: valor de la variable de salida cuando la variable de entrada es nula. Si el intervalo de medida no llega a valores nulos de la variable de entrada, habitualmente se establece otro punto de referencia para definir el offset.
Linealidad o correlación lineal.
Sensitividad de un sensor: relación entre la variación de la magnitud de salida y la variación de la magnitud de entrada.
Resolución: mínima variación de la magnitud de entrada que puede apreciarse a la salida.
Rapidez de respuesta: puede ser un tiempo fijo o depender de cuánto varíe la magnitud a medir. Depende de la capacidad del sistema para seguir las variaciones de la magnitud de entrada.
II.2.i.a. MEMS (Sistemas Microelectromecánicos).
Los sistemas microelectromecánicos (MEMS): son la integración de elementos mecánicos, sensores, actuadores y electrónicos junto con la tecnología de la micro fabricación, para un único dispositivo de silicio.
Los MEMS hacen posible la realización de varias etapas de algún proceso en un encapsulado completo, esto debido a que reúnen capacidades de control por medio de sensores, que recopilan la información por medio de fenómenos mecánicos, termales, químicos, ópticos y magnéticos de la medición, para que posteriormente su electrónica procese esta información y ordene los actuadores (microsensores y microactuadores), para que regulen, coloquen, filtren, el resultado deseado.
II.2.ii. Microcontroladores.
Un microcontrolador es un circuito integrado que ofrece las características de una computadora. En su interior se encuentran las tres unidades principales de una computadora, CPU (Unidad de Procesamiento Central), memoria y dispositivos de entrada y salida.
II.2.ii.a. Familia de microcontroladores AVR de Atmel.
Son dispositivos CMOS de 8,16 y 32 bits basados en tecnología RISC, capaces de ejecutar la mayoría de sus instrucciones en cada ciclo de reloj y una estructura de I/O. Poseen osciladores internos, temporizadores, USART, SPI, PWM, ADC, comparadores analógicos, entre otras cosas:
Soportan programación en ensamblador y lenguaje C.
Demodulador
Alto desempeño y bajo consume de energía (menos de 1uA en estado apagado, y 1.1mA en activo).
Cuentan con una gama de instrucciones sencillas en lenguaje ensamblador.
Cuenta con 32 registros de propósito general.
II.2.iii. Sistema de comunicación digital.
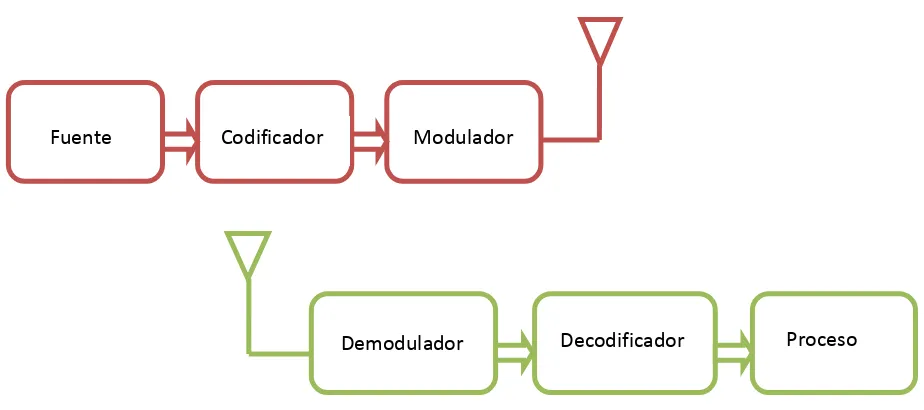
[image:20.612.77.539.371.576.2]Es un conjunto de dispositivos electrónicos que intervienen en un proceso de intercambio de información de un lugar a otro. En la figura 1 se muestra el diagrama a bloques de un sistema de comunicación digital.
Figura 1.- Diagrama a bloques de un sistema de comunicación digital. Modulador
Codificador Fuente
II.2.iv. Motores de corriente directa.
El motor de corriente continua es una máquina que convierte la energía eléctrica en mecánica mediante el movimiento rotatorio.
Una motor de corriente continua se compone de dos partes, un estator que da soporte mecánico al aparato y tiene un hueco en el centro generalmente de forma cilíndrica. En el estator además se encuentran los polos, que pueden ser de imanes permanentes o devanados con hilo de cobre sobre núcleo de hierro. El rotor es generalmente de forma cilíndrica, también devanado y con núcleo, al que llega la corriente mediante dos escobillas.
III.1. Aplicación del acelerómetro.
El MMA2260D es un acelerómetro lineal compacto de bajo consumo de energía (5 Volts) que incluye un elemento de sensado y una interfaz integrada capaz de tomar la información del elemento de sensado y proveer una señal analógica de salida.
Teoría de operación.
El funcionamiento de este dispositivo se observa en la figura III.1.1, este consta de tres placas denominadas m, n y p, que forman entre ellas dos capacitores Ca y Cb, a este conjunto de elementos se le denomina g-cell. Las placas m y p se mantienen fijas en el sistema, mientras que la placa n se mueve horizontalmente entre estas dos.
Al someter el sistema a un movimiento, existe un cambio de distancias entre las placas m-n y n-p, causando que exista un cambio en el valor de capacitancias de Ca y Cb, este cambio de valores resulta como un nivel alto de voltaje a la salida, que es medible y proporcional a la aceleración.
El valor de capacitancia para Ca y Cb con respecto al movimiento cambia de valor para cada capacitor, de acuerdo con la siguiente ecuación.
Donde:
A= Área del lado de la viga.
N= Número de vigas.
Ɛ= Constante dieléctrica del material.
D= Distancia entre las vigas.
Descripción de las terminales del acelerómetro MMA2260D.
La descripción de las terminales del MMA2260D se muestra en la tabla III.1.1.
Pin Nombre Función
1-3 VSS Sin conexión.
4 VOUT Voltaje de salida del acelerómetro.
5 STATUS Terminal de salida lógica que indica algún error.
6 VDD Fuente de alimentación
7 VSS Tierra eléctrica.
8 ST Terminal de entrada lógica para iniciar auto-prueba.
9-13 Trimp pins. Sin conexión.
14-16 NC Sin conexión
El fabricante del acelerómetro recomienda un circuito esquemático para su correcta aplicación, este circuito fue adoptado en el presente proyecto y se muestra en la figura III.1.2.
Figura III.1.2- Circuito esquemático y orientación del acelerómetro MMA2260D.
III.2. Manejo del microcontrolador ATmega8.
Arquitectura de los microcontroladores AVR de Atmel
Esta sección describe acerca de la arquitectura de los microcontroladores AVR. La función principal del CPU es asegurar la correcta ejecución del programa, por lo tanto, deberá acceder a las memorias, realizar operaciones, controlar periféricos y manejar interrupciones.
En el Anexo 1 se encuentra el diagrama a bloques de la arquitectura de los microcontroladores AVR de Atmel.
Status Register.- El registro de estado del AVR está compuesto por los siguientes bits con valor inicial cero y habilitados para lectura y escritura:
Bit 7.- (I) Habilitación global de interrupciones.
Bit 6.- (T) Almacenamiento del bit copia.
Bit 5.- (H) Bandera de medio acarreo.
Bit 4.- (S) Bandera de signo.
Bit 3.- (V) Bandera de sobreflujo de complemento a dos.
Bit 2.- (N) Bandera negativa.
Bit 1.- (Z) Bandera de cero.
Bit 0.- (C) Bandera de acarreo.
[image:26.612.164.450.381.651.2]Registros de propósito general.- Los registros de propósito general de los microcontroladores AVR se muestran en la figura III.2.1.
Fuentes de interrupción y reset.
La base de una interrupción es la necesidad de un dispositivo periférico de enviar información al procesador principal del sistema.
Los microcontroladores AVR proveen diferentes fuentes de interrupción, localizadas en vectores de interrupciones. Estas interrupciones y la función de reset, tienen un vector de programación distinto localizado en la memoria flash del dispositivo. Todas las interrupciones son habilitadas de forma individual en sus registros asociados correspondientes y adicionalmente escribiendo un uno lógico a la variable global de interrupciones en el registro de estado (terminal 7).
Las direcciones de menor valor en el espacio de memoria flash de la programación, están designadas para el vector de reset. El tiene la mayor prioridad, seguida de la interrupción externa cero (INT0).
Cuando ocurre una interrupción, la terminal 7 del registro de estado se “limpia”, colocando un cero lógico como valor y todas las interrupciones se deshabilitan.
Cuando el AVR acaba la secuencia de interrupción, regresará siempre al programa principal y ejecutará la siguiente instrucción a la interrupción. En caso de que el reset ocurra, el programa se regresa a la primera instrucción.
Para activar el circuito de reset de nuestro proyecto, únicamente es necesario activar las interrupciones globales con un comando de la tecnología RISC:
Circuito de reset.
El circuito de reset es aquel que permite regresar todos los registros de entradas y salidas a sus valores iniciales después de empezar a ejecutar el programa del vector de reset.
Cuando una fuente de reset se activa, todos los puertos de entradas y salidas regresan a sus estados iniciales en el mismo ciclo de reloj.
[image:28.612.215.390.344.486.2]El circuito de reset utilizado en este trabajo se muestra en la figura III.2.2.
Figura. III.2.2.- Circuito de reset.
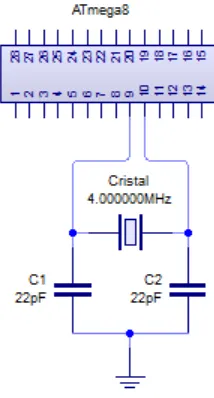
Circuito de reloj.
Para la sincronización de instrucciones dentro del microcontrolador es necesario una fuente de reloj de pulsos, en este caso se utilizo un cristal de 4 MHz.
Una fuente de reloj externa confiable es un cristal o un oscilador. La conexión de un cristal como fuente de reloj en el AVR utilizado en este trabajo, se muestra en la figura III.2.3.
Figura. III.2.3.- Circuito de cristal como fuente de reloj.
Puertos de entrada y salida en el microcontrolador ATmega8.
Todos los puertos incluidos en el AVR tienen una función de lectura – modificación-escritura cuando son utilizados como puertos digitales. Esto quiere decir que la función de un puerto puede ser cambiada sin cambiar la dirección de este. Si se configura como una salida, se pueden tener distintos valores de resultado o se puede habilitar o deshabilitar los resistores de entrada, llamado resistor de pull-up.
Registro DDRx.- El registro DDRx configura la dirección. Escribir un uno a un bit de este registro, configura la terminal como una salida; al escribir un cero, se le convierte en entrada.
Registro PINx.- Lee el estado de PORTx, independientemente del estado de DDRx. Básicamente sirve para leer el estado de la terminal del puerto cuando este se ha configurado como entrada.
Registro PORTx.- Si la terminal está configurada como salida, escribir un uno o un cero en el bit correspondiente de este registro, ocasiona que la salida en esta terminal sea uno o cero.
Si la terminal está configurada como entrada, escribir un uno en el bit correspondiente de este registro, habilita el resistor de pull-up. Escribir un cero, estando configurado como entrada, deshabilita el resistor de pull-up.
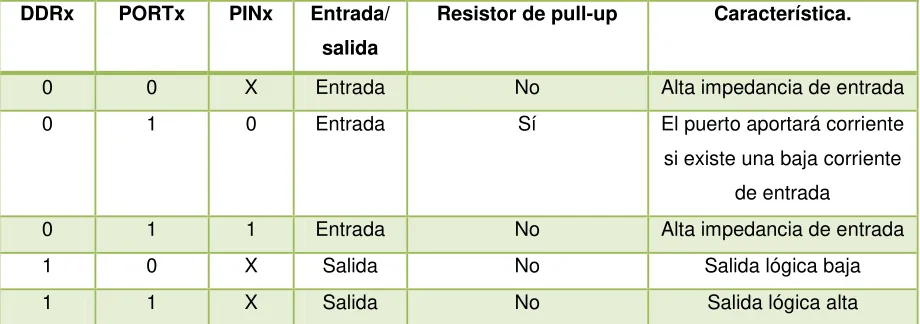
Se puede observar la configuración en los puertos en la tabla III.2.4.
DDRx PORTx PINx Entrada/ salida
Resistor de pull-up Característica.
0 0 X Entrada No Alta impedancia de entrada 0 1 0 Entrada Sí El puerto aportará corriente si existe una baja corriente
de entrada
0 1 1 Entrada No Alta impedancia de entrada
1 0 X Salida No Salida lógica baja
[image:30.612.80.540.517.679.2]1 1 X Salida No Salida lógica alta
Los puertos de entrada / salida tienen también otras funciones, las ocupadas en este trabajo fueron las referentes a los puertos B como salidas digitales, puerto C en su configuración como convertidores analógico-digitales y el puerto D en su configuración como lectura y escritura de la USART.
Convertidor analógico-digital en el microcontrolador ATmega8.
Un convertidor analógico-digital (ADC) es un dispositivo capaz de convertir un nivel de voltaje analógico en un determinado valor binario (valor digital).
Un ADC establece una relación entre su entrada y salida, dependiendo de la resolución con que este cuente. El valor de la resolución se obtiene, si sabemos el valor máximo de entrada y la cantidad máxima de salida en dígitos binarios.
El convertidor del ATmega8 posee una resolución de 10 bits, si se trabaja entre 50 KHz y 200 KHz. Utiliza el método de aproximaciones sucesivas. El ADC está conectado a un multiplexor analógico de 8 canales que permite ocho entradas del puerto C, dependiendo del tipo de encapsulado.
El ADC contiene un circuito de muestreo y retención el cuál asegura que el voltaje introducido en el ADC se mantenga durante toda la conversión.
El ADC contiene una fuente separada de voltaje analógico llamado AVcc, el
cual debe ser más o menos 0.3 Volts de Vcc para evitar ruido en la conversión. También se puede emplear una referencia de voltaje interna de 2.56 Volts.
El ADC convierte una entrada analógica a un valor digital de 10 bits por método de aproximaciones sucesivas. El mínimo valor representa tierra y el máximo valor representa AREF (Voltaje de referencia) menos el bit de menor peso o LSB (Less Significant Bit). Se pueden conectar de manera opcional AVcc o
referencia al escribir un uno en los bits de referencia en el registro del multiplexado del convertidor analógico-digital ADMUX.
Para utilizar de mejor manera el convertidor analógico-digital del AVR ATmega8, se debe de tener presente las siguientes consideraciones.
Circuito para una entrada analógica en el convertidor analógico-digital del microcontrolador ATmega8.
[image:32.612.130.471.362.524.2]Cualquier señal analógica aplicada en alguna entrada del convertidor, está sujeta a la capacitancia presentada por la terminal y la corriente de fuga de la misma. Cuando se selecciona un canal de entrada, la señal debe pasar por el capacitor de muestreo y retención (S/H) y la resistencia en serie del mismo.
Fig. III.2.4 circuito para una entrada analógica.
De igual forma se debe tomar en cuenta el teorema de Nyquist (Frecuencia
de Salida ≤ ½ frecuencia de muestreo) para evitar cualquier distorsión.
Tiempo de conversión.
Para realizar adecuadamente una conversión, la frecuencia del circuito de aproximaciones sucesivas debe de estar entre 50 KHz y 200 KHz para una resolución de 10 bits. Si se requiere una resolución menor, se pueden utilizar frecuencias superiores a 200 KHz.
Para obtener las frecuencias de trabajo del ADC dentro del intervalo mencionado, el módulo del mismo emplea el circuito de pre-escala.
Una vez que se inicia una conversión, al ADC le toma 13 ciclos de reloj de, llevar a cabo una conversión; exceptuando la primera que le toma 25 ciclos de reloj.
Referencias de voltaje.
El voltaje en la terminal AREF indica el intervalo de voltaje de la conversión. Las referencias de voltaje pueden ser seleccionadas entre AVcc, una referencia
interna de 2.56 Volts o el voltaje en la terminal externa AREF, se recomienda conectar un capacitor entre esta terminal y tierra para aumentar la inmunidad al ruido del ADC.
Configuración del convertidor analógico-digital en el AVR ATmega8.
Registro de convertidor analógico-digital (ADC).-
Cuando una conversión analógico-digital se ha completado, el resultado es colocado en este par de registros. Cuando se lee ADCL, el registro no se actualiza hasta leer ADCH, si el resultado es ajustado a la izquierda y no se requieren más de 8 bits de resolución, se puede leer solamente ADCH. De otra forma se debe leer primero el registro ADCL, después ADCH.
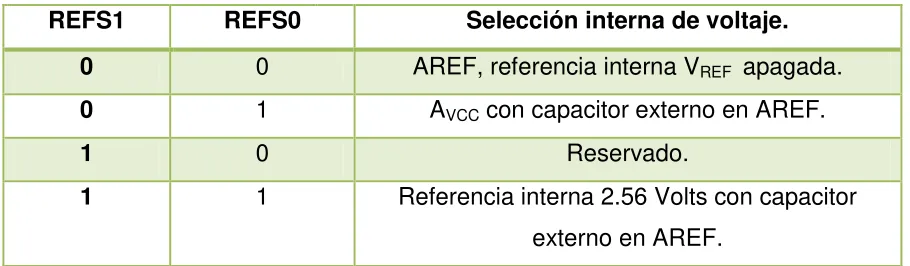
Registro de selección del multiplexor (ADMUX).
Bit 7:6 (REFS1: REFS0) Bits de selección de referencia. Seleccionan la referencia de voltaje para el ADC. La opción de referencia de voltaje interna no debe utilizarse si se tiene conectado el pin AREF. Ver tabla III.2.5.
Bit 5 (ADLAR) Resultado de alineado a la izquierda del ADC.
Bit 4 - Reservado
Bit 3:0 (MUX3:MUX0) Selección de canal analógico. Selecciona que canal del ADC se utilizará. Ver tabla III.2.6.
REFS1 REFS0 Selección interna de voltaje.
0 0 AREF, referencia interna VREF apagada.
0 1 AVCC con capacitor externo en AREF.
1 0 Reservado.
1 1 Referencia interna 2.56 Volts con capacitor
[image:34.612.78.533.527.660.2]externo en AREF.
MUX3 MUX2 MUX1 MUX0 Entrada
0 0 0 0 ADC0
0 0 0 1 ADC1
0 0 1 0 ADC2
0 0 1 1 ADC3
0 1 0 0 ADC4
[image:35.612.79.528.95.250.2]0 1 0 1 ADC5
TABLA III.2.6.- Selección de canal analógico.
Registro de control y estado A (ADCSRA).-
Bit 7 (ADEN) Habilitación de ADC. Escribir un uno a este bit, activa el ADC.
Bit 6 (ADSC) Iniciar conversión. Modo de una sola conversión, escribir este bit a uno, inicia cada conversión. Permanece en uno mientras dure la conversión.
Bit 5 (ADFR) Habilitar modo free – running. Si se activa este bit, el ADC realiza conversiones y actualizaciones al registro ADC continuamente.
Bit 4 (ADIF) Bandera de interrupción por conversión del ADC. Se activa esta bandera cuando una conversión del ADC se completo.
activa y también esta activado el bit I del Registro de Estado General.
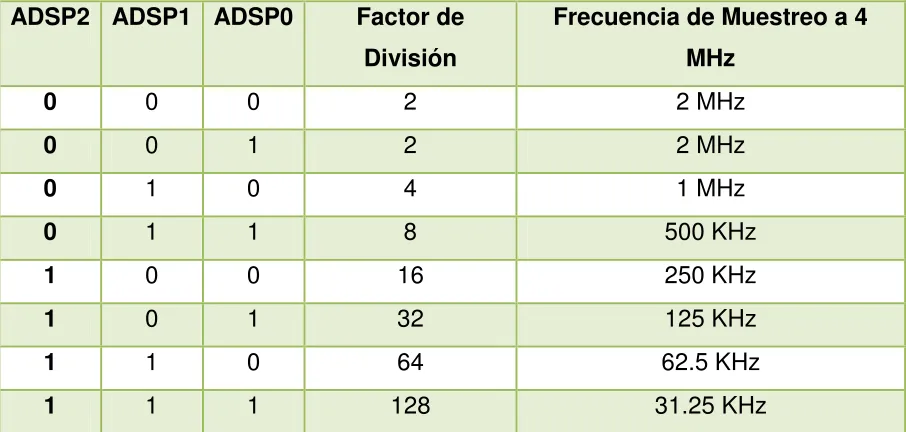
Bit 2:0 (ADPS2:ADPS0) Pre-escala del reloj del ADC. Ver tabla III.2.7.
ADSP2 ADSP1 ADSP0 Factor de
División
Frecuencia de Muestreo a 4
MHz
0 0 0 2 2 MHz
0 0 1 2 2 MHz
0 1 0 4 1 MHz
0 1 1 8 500 KHz
1 0 0 16 250 KHz
1 0 1 32 125 KHz
1 1 0 64 62.5 KHz
[image:36.612.80.533.239.455.2]1 1 1 128 31.25 KHz
Tabla III.2.7.- Pre-escala de reloj para el ADC.
Transmisor y receptor serial asíncrono universal en el
microcontrolador ATmega8.
El transmisor y receptor serial asíncrono y síncrono universal o USART (Universal Synchronous and Asynchronous Serial Reciever and Transmitter) es una unidad de comunicación periférica flexible, que en el microcontrolador ATmega8, permite, entre otras funciones:
Operación síncrona y asíncrona.
Operación en modo maestro y esclavo con reloj síncrono.
Soporta tramas de 5, 6, 7, 8 y 9 bits de datos y 1 o 2 bits de parada.
Generador de paridad par o impar.
Detección de errores.
Filtrado de ruido (inicio falso, filtro digital).
Generación de interrupciones por transmisión completa, por recepción completa o por registro de datos de transmisión vacío.
Comunicación entre multiprocesadores.
Doblador de velocidades en modo de comunicación asíncrona.
Configuración de la USART en el microcontrolador ATmega8
Registro de entrada / salida de datos de la USART (UDR).-
Es el registro donde se escriben los datos a transmitir (TXB) y de donde se leen los datos recibidos (RXB). Sólo se pude escribir en este registro cuando el bit UDRE (USART Data Register Empty) esté en estado lógico alto; los datos escritos en este registro mientras el UDRE esté en cero, serán ignorados.
Registro de control y estado A de la USART (UCSRA).-
Bit 6 (TXC) Transmisión completa. Este bit se activa cuando se han enviado todos los datos del buffer de transmisión.
Bit 5 (UDRE) Registro de datos de la USART vacío. Indica que el buffer UDR está listo para recibir nuevos datos.
Bit 4 (FE) Error de trama. Se activa cuando existe un error en la trama de datos recibidos.
Bit 3 (DOR) Data overrun. Si el buffer de recepción está lleno y se detecta un nuevo bit de inicio.
Bit 2 (PE) Error de paridad. Si se activa la verificación de paridad (UPM1 = 1) y existe un error de paridad en la transmisión, este bit se activa.
Bit 1 (U2X) Doblador de velocidad. Sólo tiene efecto en modo asíncrono, reduce el divisor de baud rate de 16 a 8, lo que ocasiona que se duplique la velocidad de transmisión.
Bit 0 (MPCM) Modo de comunicación multiprocesador. Activa el modo de comunicación multiprocesador, todas las tramas recibidas que no contengan información de dirección serán ignoradas.
Registro de control y estado B de la USART (UCSRB).-
Bit 6 (TXCIE) Habilitación de interrupción por transmisión completa.
Bit 5 (UDRIE) Habilitación de Interrupción por registro de datos de USART vacío.
Bit 4 (RXEN) Habilita el receptor de la USART
Bit 3 (TXEN) Habilita el transmisor de la USART.
Bit 2 (UCSZ2) En conjunto con USCZ1:0, establecen el tamaño de bits de datos a utilizar.
Bit 1 (RXB8) Si se escoge una trama de datos de 9 bits, aquí se ubica el noveno bit recibido y debe ser leído antes de leer los 8 bits restantes.
Bit 0 (TXB8) Si se escoge una trama de 9 bits de datos, aquí se debe escribir el noveno bit de datos y debe escribirse antes de los ocho restantes.
Registro de control y estado C de la USART (UCSRC).-
Bit 7 (URSEL) Este bit selecciona si se accede al registro USCRC (URSEL = 1) o al registro UBRRH (URSEL = 0)
este bit, la USART opera en forma síncrona.
Bit 5:4 (UPM1:UPM0) Modo de paridad. Las posibles combinaciones para el modo de operación con paridad se muestran en la tabla III.2.8.
Bit 3 (USBS) Selección de bits de parada. USBS = 0 significa un bit de parada y USBS = 1, representa 2 bits de parada.
Bit 2:1 (UCSZ1:UCSZ0) En conjunto con UCSZ2, establecen el tamaño de bits de datos, de acuerdo con la tabla III.2.9.
Bit 0 (UCPOL) Polaridad de reloj. Sólo aplica en modo síncrono y determina la relación entre el cambio en la salida de datos y la entrada de datos y el reloj de sincronía (XCK), de acuerdo con la tabla III.2.10.
UPM1 UPM0 Modo de paridad
0 0 Desactivada
0 1 Reservado
1 0 Paridad par
[image:40.612.83.531.528.684.2]1 1 Paridad impar
.UCSZ2 UCSZ1 UCSZ0 Tamaño de datos
0 0 0 5 Bits
0 0 1 6 Bits
0 1 0 7 Bits
0 1 1 8 Bits
1 0 0 Reservado
1 0 1 Reservado
1 1 0 Reservado
1 1 1 9 Bits
Tabla. III.2.9.- Tamaño de tramas en la USART.
UCPOL Cambio de transmisión (TXD) Cambio de recepción (RXD)
0 Flanco de Subida en XCK Flanco de Bajada en XCK
[image:41.612.81.529.93.368.2]1 Flanco de Bajada en XCK Flanco de Subida en XCK
Tabla.III.2.10.- Configuración de sincronía en UCPOL en la USART.
Registros de selección de baud rate, UBRRH y UBRRL.
muestra en la tabla III.2.11.
Baud rate (bps) Frecuencia de oscilación 4 MHz
U2X = 0 U2X = 1
UBRR Error UBRR Error
2400 103 0.2% 207 0.2%
4800 51 0.2% 103 0.2%
9600 25 0.2% 51 0.2%
14.4 K 16 2.1% 34 0.8%
19.2 K 12 0.2% 25 0.2%
28.8 K 8 3.5% 16 2.1%
38.4 K 6 7% 12 0.2%
57.6 K 3 8.5% 8 3.5%
115.2 K 1 8.5% 3 8.5%
230.4 K 0 8.5% 1 8.5%
250 K 0 0% 1 0%
[image:43.612.165.448.95.304.2]Máximo 250 kbps - 0.5 Mbps -
Tabla III.2.11.- Configuración del registro UBRR de la USART.
III.3. Transmisión y recepción de la señal.
Transmisión de la señal de información.
Para la transmisión de información, se utiliza el RCT-433-AS, que es un dispositivo para aplicaciones a control remoto, se elige por varias razones, tanto características eléctricas como por su diseño compacto y su largo alcance (15 metros), además de su bajo costo (tan solo 2 dólares).
Algunas de las características del RCT-433-AS son:
433.92 MHz de frecuencia de operación. Corriente de consumo a 3 volts de 5 mA. 0 dBm de potencia a 3 volts.
Transmisión a 4800 bauds.
Teoría de operación.
Modulación OOK.- Es una modulación de amplitud en forma binaria. Cuando existe un cero lógico en la línea de datos, el transmisor se apaga, eliminando la portadora por completo. En este estado la corriente de consumo es menor a 1 mA. Cuando se envía un uno lógico, la portadora vuelve a ser “encendida” consumiendo una corriente de aproximadamente 4.5 mA con 3 Volts de alimentación.
OOK es un método de modulación para aplicaciones de control remoto de bajo consumo eléctrico. El intervalo de datos de la modulación OOK está limitado por el tiempo de encendido del oscilador. Los osciladores con alto coeficiente de calidad (Q) a frecuencias centrales, toman mucho tiempo de encendido a contrario de osciladores con bajo Q. El tiempo de encendido del oscilador determina el máximo intervalo de datos que pueden ser transmitidos.
Uso del RCT-433-AS con el UART del microcontrolador.
Para poder transmitir con este dispositivo a partir del microcontrolador, los datos que se desean transmitir se deben invertir para poder utilizar el UART del microcontrolador, puesto que el estado normal de UART es un 1 lógico que causa una transmisión constante. Se invierten los datos para que el transmisor esté apagado en un estado de apagado y esté encendido en un estado lógico 0, esto asegura que el transmisor estará encendido solamente cuando se envíen datos.
Oscilador Estabilizado SAW.
El transmisor funciona con una oscilación LC cuya frecuencia central es controlada por un resonador SAW (Surface Acoustic Wave) o superficie de onda acústica. Este modulo está diseñado para trabajar con una impedancia de 50Ω.
Intervalo de datos.
El tiempo de respuesta del oscilador es de aproximadamente 40 µs, lo que permite un máximo de transmisión de 4800 bits por segundo (Bauds).
Alimentación eléctrica.
Para un correcto funcionamiento, el módulo transmisor requiere de una fuente de alimentación libre de ruido, es por esto que se le colocaron capacitores de 4.7µF y de 10nF para dirigir al ruido adicional hacia tierra.
Salida a la antena.
El modulo transmisor RCT-433-AS es sensitivo a cargas desequilibradas, por lo que es necesario emplear un circuito atenuador T, el cual provee una impedancia bastante cercana a los 50Ω, El circuito T se muestra en la figura III.3.1.
Figura III.3.1. Circuito T de impedancia/atenuación para el módulo transmisor RCT-433-AS.
Recepción de la señal de información.
Para la recepción de la señal de información, se emplea el módulo receptor RCR-433-RP el cual hace una buena combinación con el transmisor, dado que son del mismo fabricante, y que no requiere de componentes externos de radiofrecuencia a excepción de la antena para trabajar adecuadamente. Algunas de las características del RCR-433-RP son:
Ancho de banda de 3 MHz.
Compatibilidad con cualquier transmisor LC o SAW. Alimentación eléctrica de 5 Volts.
Teoría de Operación.
Recepción AM.- El módulo RCR-433-RP y el RCT-433-AS son compatibles con las modulaciones ASK y OOK.
El RCR-433-RP utiliza un detector AM súper regenerativo el cual demodula cualquier portadora de AM. Un detector súper regenerativo, es un detector con una ganancia mayor a la unidad; utiliza una constante de tiempo RC en la etapa de ganancia, por lo que, cuando la ganancia disminuye, la oscilación del detector cesa.
Cuando la oscilación cesa, lo hace también la corriente de la etapa de ganancia. Posteriormente al cargarse el circuito RC, se incrementa la ganancia y la oscilación, por lo que comienza de nuevo la oscilación. De esta forma, la oscilación de la etapa de ganancia se enciende y se apaga de manera intermitente determinada por la constante de tiempo RC.
La detección de portadora se logra midiendo la corriente del emisor que proporciona la etapa de ganancia. La señal de RF de entrada que tiene la frecuencia de la oscilación local ayuda a este a su reencendido. Si la amplitud de la señal de entrada crece, la oscilación del receptor permanece encendida por un periodo mayor de tiempo y la corriente del emisor es mayor; es por esto, que se puede detectar una señal de oscilación colocando un filtro pasa-bajas de la corriente del emisor.
Salida de datos.
Entrada de antena.
La terminal 1 del módulo receptor RCR-433-RP es la entrada de la antena de 50Ω.
III.4. Interpretación e implementación de la señal.
Cada movimiento realizado en la muñeca del individuo refleja un cambio de voltaje a las salidas de los acelerómetros, estas señales analógicas se convierten en señales digitales por medio del microcontrolador para ser procesada por el transmisor.
Los intervalos de voltaje que proporciona el acelerómetro son:
Punto hacia arriba: 3.7 Volts. Punto de paro: 2.5 Volts. Punto hacia abajo: 1.3 Volts.
Se mide en nivel de voltaje para cada cambio de posición en la muñeca, que es proporcionado por cada acelerómetro. Se realiza el siguiente programa de conversión analógica-digital para el microcontrolador.
Obtención de valores digitales para los movimientos de la mano.
#include <avr/io.h> //Llamada a librer“as #include <avr/interrupt.h>
void init_ADC(void) //Función inicio de registros de ADC
{
DDRB=0xFF; //Puerto B como salidas
ADMUX=0b00100001; // Canal ADC1, referencia externa +5V
// Alineación de resultados a la izquierda ADCH
// Habilitar interrupción por conversión completa
sei(); //Habilitación de interrupciones generales }
ISR(SIG_ADC) //Vector de interrupción por conversión de ADC completa
{
ADCL=0; //Registro ADCL=0
PORTB=ADCH; //Resultado de ADCH salida a Puerto B
}
int main(void) //Función principal
{
init_ADC(); //Llamada a function init_ADC
ADCSRA|=_BV(ADSC); //Iniciar conversión
while(1); //Realizar infinitamente
}
Por lo que los niveles de voltaje para la conversión del ADC en el microcontrolador se ajustan a los siguientes valores.
Para el acelerómetro canal X:
Valor en Volts. Valor en hexadecimal.
Derecha. 3.1 a 3.9 De: 10011110 (0x9E)
a: 11111111 (0xFF)
Paro. 1.7 a 3.0 De: 01011000 (0x58)
a: 10011101 (0x9D)
Izquierda. 0 a 1.6 De: 00000000 (0x00)
Para el acelerómetro canal Y:
Valor en Volts. Valor en hexadecimal.
Adelante. 3.1 a 3.9 De: 10101111 (0xAF)
a: 11111111 (0xFF)
Paro. 2.0 a 3.0 De: 01111111 (0x7F)
a: 10011111 (0x9F)
Atrás. 0 a 1.9 De: 00000000 (0x00)
a: 01011111 (0x5F)
El valor en hexadecimal es el valor digital que se le asigna a cada posición para que el vehículo responda exactamente a cada valor de voltaje. Con estos valores hexadecimales se ajustan parámetros para los programas del microcontrolador.
Con respecto a la transmisión y recepción de datos los programas correspondientes para los microcontrolador ATmega8, quedan de la siguiente manera:
Transmisión de datos:
//Interpretación del movimiento y transmisión:
#include<avr/io.h> // Llamada a librer“as
#include<avr/interrupt.h>
uint8_t move=0, canal=0, data=0; //Declaración de variables move,
//canal y data de 8 bits
void init_USART(void) //Función inicio de registros de USART
{
UBRRL=51; //4800 baudios de velocidad de transmisión
UCSRA=0; //Registro UCSRA = 0
UCSRB=0b00001000; //Habilitar transmisor
UCSRC=0b10110110; //Frame de 8 bits de datos, Modo as“ncrono //Paridad impar, 1 bit de parada
}
void init_ADCX(void)//Función inicio de registros de ADC para movimiento X
{
canal=1; //Variable canal = 1, canal x
ADMUX=0b00100001; // Canal ADC1, referencia externa +5V
// Alineación de resultados a la izquierda ADCH ADCSRA=0b10101111; //Muestreo de 31.25 Kmuestras por segundo, FreeRunning
// Habilitar interrupción por conversión completa
}
void init_ADCY(void) )//Función inicio de registros de ADC para movimiento Y
{
canal=2;//Variable canal = 2, canal y
ADMUX=0b00100011; // Canal ADC3, referencia externa +5V
// Alineación de resultados a la izquierda ADCH
ADCSRA=0b10101111; //Muestreo de 31.25 Kmuestras por segundo, FreeRunning
}
ISR (SIG_ADC) //Vector de interrupción por conversión de ADC completa {
ADCL=0; //Registro ADCL = 0
move=ADCH; //Variable move con valor de ADCH
if(canal==1)//Condición para movimiento X
{
if(move < 0x57)//Condición de parámetro de valor digital
{
data = 0xC3; //Atrás }
else
{
if(move > 0x9D) )//Condición de parámetro de valor digital
{
data = 0xAD; //Adelante
}
else
{
data = 0x00; //Detener canal X
}
}
init_ADCY();Llamada a función init_ADCY
}
else//Derecha Izquierda
{
if(move < 0x5F) )//Condición de parámetro de valor digital
{
data = 0x1B; //Izquierda
}
else
{
if(move > 0x9F) )//Condición de parámetro de valor digital
{
data = 0xDE; //Derecha
}
{
data = 0x00; //Detener canal Y
}
}
init_ADCX();//Llamada a función init_ADCX
}
UDR=0b11111010; //Byte de encendido y dirección
loop_until_bit_is_set(UCSRA,UDRE); //Enviar hasta que no existan bits
//en el registro UDRE
UDR=data; //Byte de información
loop_until_bit_is_set(UCSRA,UDRE); //Enviar hasta que no existan bits
//en el registro UDRE
data=0;//Variable data=0
ADCH=0;//Registro ADCH=0
ADCL=0;//Registro ADCL=0
ADCSRA|=_BV(ADSC);//Iniciar conversión
}
int main (void)//Función Principal
{
sei();//Habilitación de interrupciones generales
init_USART();//Llamada a function init_USART
init_ADCX();//Llamada a function ADCX
ADCSRA|=_BV(ADSC);//Iniciar conversión
while(1);//Realizar infinitamente
}
Recepción de datos:
//Recepción y salidas a actuadores
#include<avr/io.h> // Llamada a librer“as
#include<avr/interrupt.h>
uint8_t data=0, direcc=0; //Declaración de variable data y direcc de 8 bits
void retardo(void) //Función de Retardo {
uint16_t i=0;
for(i=0; i<15000; i++);
void init_io (void) //Función de inicio de registros de entradas y salidas {
DDRC=0x7F; //Puerto C como salidas
PORTC =0x00; //Salidas de puerto C en estado bajo
DDRB=0xFF; //Puerto B como salidas
}
void init_USART(void) //Función inicio de registros de USART
{
UBRRL=51; //4800 baudios de velocidad de transmisión UCSRA=0; //Registro UCSRA = 0
UCSRB=0b10010000; //Habilitar interrupcion por Rx Completa
// Habilitar receptor
UCSRC=0b10110110; //Frame de 8 bits de datos, Modo as“ncrono //Paridad impar, 1 bit de parada
}
ISR(SIG_UART_RECV) //Vector de interrupción por recepción completada
{
direcc=UDR; //Asignar primer valor de UDR a direcc
loop_until_bit_is_set(UCSRA,UDRE); //Enviar hasta que no existan bits
//en el registro UDRE
data=UDR; //Asignar Segundo valor de UDR a data
loop_until_bit_is_set(UCSRA,UDRE); //Enviar hasta que no existan bits
//en el registro UDRE
PORTC=0x7F;//Salidas de puerto C en estado alto
if(direcc==0b11111010)// Condición de valor de direcc
{
if(data==0xAD)//Condición para data valor ADELANTE {
PORTB=0x01; //Salida a actuador en puerto B
retardo(); // Llamada a función retardo
}
else
{
if(data==0x00) //Condición para data valor DETENER
{
}
else
{
if(data==0xC3)//Condición para data valor ATRAS
{
PORTB=0x02; //Salida a actuador en puerto B
retardo(); // Llamada a función retardo
}
else
{
if(data==0x1B) //Condición para data
//valor IZQUIERDA
{
PORTB=0x08; //Salida a actuador en
//puerto B
}
else
{
if(data==0xDE) //Condición para
//data valor DERECHA
{
PORTB=0x04; //Salida a
//actuador en puerto B
}
else//Condición para data
//valor DETENER
{
PORTB=0x00; //Salidas en
//estado bajo en puerto B
} } } } } }
else//Condición para data valor DETENER
{
PORTB=0x00; //Salidas en estado bajo en puerto B
}
int main (void) //Función principal {
while(1) //Realizar Infinitamente
{
data=0 //Variable data=0
sei(); //Activación de interrupciones generales init_io(); //Llamada a función init_io
init_USART(); //Llamada a función init_USART
}
}
III.5. Diseño de los circuitos.
Circuitos de transmisión y recepción.
[image:58.612.131.479.452.678.2]Se realiza el diagrama esquemático de los circuitos completos tanto transmisor y receptor.
Fig. III.5.2.- Diagrama esquemático para el circuito de receptor con actuadores.
Fig. III.5.3.- Diagrama esquemático para el módulo de transmisión RCT-433-AS.
Fig. III.5.4.- Diagrama esquemático para el módulo de recepción RCT-433-AS.
[image:60.612.98.517.373.564.2]Fig. III.5.5.- Diagrama para el circuito impreso del acelerómetro.
[image:61.612.138.477.391.646.2]Fig. III.5.7.- Diagrama para el circuito impreso del receptor.
[image:62.612.138.478.418.671.2]Construcción del Transmisor.
Fig. III.5.9. Caja con fuente de alimentación para el transmisor.
[image:63.612.88.528.456.620.2]
Fig. III.5.12. Transmisor.
Construcción del vehículo (circuito receptor).
Para la construcción del vehículo se utilizo el chasis de un juguete que ya se tenía. El juego de engranes para el movimiento adelante/atrás y derecha/izquierda está representado por la siguiente imagen.
Fig. III.5.14. Chasis del Vehículo.
Fig. III.5.16. Vehículo con circuito receptor y antena.
Pruebas de laboratorio
Se realizaron las siguientes pruebas de laboratorio.
Prueba 1.- Comprobación circuitería de las placas transmisión y recepción.
Parte 1a. Circuitería del microcontrolador.
Se programó el ATmega8 con una secuencia de salida en el puerto B, y con una punta de prueba se comprobó que realmente se tuviera la misma secuencia. Dado que se obtuvo la secuencia deseada en el puerto B, concluimos que la placa del circuito esta bien realizada.
#include <avr/io.h> //Librer“as de entrada y salida e interrupciones #include <avr/interrupt.h>
void config_io(void)
{
DDRB=0xFF; //Configuración de puerto b como Salida }
void retardo(void)
{
int16_t i; //Define entero de 16 bits
for(i=0;i<6000;i++); //Tiempo de retardo de aproximadamente 1 segundo
}
void secuencia1(void) //Secuencia de corrimiento en los primeros 4 pines del puerto b
}
int main(void) //Función principal {
config_io(); //Llamada a función config_io
sei(); //Habilitación de interrupciones generales while(1)
{
secuencia1(); //Llamada a secuencia1
}
}
Programa 1a. Secuencia en el puerto B, para el microcontrolador
Parte 1b. Circuitería del transmisión/recepción.
Para poder comprobar que las placas funcionan correctamente, se realizo el programa 1, para el microcontrolador que transmite un “1” constante.
Como en la recepción se obtuvo este 1 constante, se demuestra que las placas funcionan apropiadamente.
#include<avr/io.h> // Llamada a librer“as
#include<avr/interrupt.h>
uint8_t data=0; //Declaración de variable data de 8 bits
void init_USART(void) //Función inicio de registros de USART
{
UBRRL=51; //4800 baudios de velocidad de transmisión UCSRA=0; //Registro UCSRA = 0
UCSRB=0b01001000; //Habilitar interrupcion por Tx Completa
// Habilitar transmisor
UCSRC=0b10110110; //Frame de 8 bits de datos, Modo as“ncrono //Paridad impar, 1 bit de parada
void TX_USART(void) //Función de transmisión {
UDR=0b11110101; //Enviar byte de encendido y dirección
loop_until_bit_is_set(UCSRA,UDRE); //Enviar hasta que no existan bits
//en el registro UDRE
}
ISR(SIG_UART_TRANS) //Vector de interrupción por env“o completado {
data = 0b11001100; //Valor de dato a enviar
UDR=data; //Enviar data
loop_until_bit_is_set(UCSRA,UDRE); //Enviar hasta que no existan bits en el registro UDRE
}
int main (void) //Función principal
{
while(1) //Realizar Infinitamente
{
sei(); //Activación de interrupciones generales init_USART(); //Llamada a función init_USART TX_USART(); //Llamada a función TX_USART
}
}
Programa 1b. Para transmitir un 1 constante.
Transmisión de datos:
Los problemas que se tuvieron con respecto a la transmisión de datos fue que en primera instancia, no se colocaron los pulsos de sincronía para el receptor y esto genero que no hubiera comunicación.
registro para poder ser transmitida, es por esto que un principio no se transmitía nada.
El último problema que se tuvo fue que los cables que están conectados entre el acelerómetro y el circuito transmisor se desoldaron por el movimiento brusco en la muñeca, lo que no generaba señales de entrada para el convertidor ADC del microcontrolador.
Recepción de datos:
El presente capítulo justifica los costos de diseño y construcción del prototipo de interpretación del movimiento humano para su aplicación en fisioterapias de rehabilitación para su venta.
Se consideran precios aproximados en pesos mexicanos y dólares norteamericanos con una tasa de cambio a la venta de $ 13.03 MXN al día jueves 19 de noviembre de 2009.
Presupuesto estimado para el diseño y elaboración del prototipo de interpretación del movimiento humano y venta.
Cantidad Descripción Precio (MXN) Precio (USD)
2 Salario a estudiantes de ingeniería en comunicaciones y electrónica (6 meses)
40000.00 3069.83
1 Prototipo de interpretación del movimiento humano 956.20 73.38
6 Pago de Servicios (Luz, agua, teléfono, internet) 16080.00 1234.07
1 Pago por depreciación de activos fijos 2819.00 216.34
TOTAL
59855.20+impuestos
4593.62 +impuestos
* Vigencia: Los precios tendrán una vigencia de 30 días naturales
Desglose del prototipo de interpretación del movimiento humano.
Cantidad Material Precio (MXN) Precio (USD)
Elementos Activos
2 Pilas de 9V 66.00 5.06
Elementos Pasivos
5 Resistor 10 KΩ a ¼ Watt. 5.00 0.38
5 Resistor 330 Ω a ¼ Watt. 5.00 0.38
5 Resistor 150 Ω a ¼ Watt. 5.00 0.38
5 Resistor 10 Ω a ¼ Watt. 5.00 0.38
1 Capacitor 10 µF de aluminio. 1.00 0.07
2 Capacitor 100 nF de tantalio. 4.00 0.30
4 Capacitor 100 nF cerámicos. 4.00 0.30
4 Capacitor 8.2 pF cerámicos. 4.00 0.30
4 Capacitor 100 pF cerámicos. 4.00 0.30
4 Inductor 18 nH a 5% de tolerancia (SMD). 22.50 1.72
2 Inductor de tipo Resistivo de 0.1mH. 20.00 1.53
Elementos piezoeléctricos.
2 Cristal de cuarzo a 4 MHz. 16.00 1.22
Elementos semiconductores.
2 Microcontroladores ATmega8 de Atmel. 94.00 7.21
2 LED de 20mA de consumo. 8.00 0.61
1 L293 CI amplificador de corriente. 12.00 0.92
2 C.I. 7805 regulador de tensión a 5V. 15.00 1.51
4 Diodos de propósito general. 4.00 0.30
2 Acelerómetro Motorola MMA2260D. 300.00 23.02
Sistemas Micro Electromecánicos (MEMS)
1 Acelerómetro MEMS LIS244ALH. 47.20 3.62
Elementos electromecánicos.
2 Motor DC a 9V. 48.00 3.68
Elementos de radiofrecuencia.
2 Antena de 50 Ω. 200.00 15.34
1 Módulo transmisor RCT-433-AS a 433.92MHz de Radiotronix.
22.50 1.72
1 Módulo receptor RCR-433-RP a 433.92MHz de Radiotronix.
40.00 3.06
TOTAL
956.20+impuestos
73.38 +impuestos
* Vigencia: Los precios tendrán una vigencia de 30 días naturales
Desglose del pago de servicios.
Cantidad Descripción Precio (MXN) Precio (USD)
6 Luz 1500.00 115.11
6 Agua 300.00 23.02
6 Internet 1200.00 92.09
6 Renta 13080.00 1003.83
TOTAL
16080.00+impuestos
* Vigencia: Los precios tendrán una vigencia de 30 días naturales
Desglose del pago por depreciación de activos fijos.
Cantidad Descripción Precio (MXN) Precio (USD)
2 Computadora 300.00 23.02
1 Cautín de Estación Weller 119.00 9.13
2 Grabador TITAN EX 200.00 15.34
2 Multímetro Digital 260.00 19.95
1 Muebles y Enseres 1940.00 148.88
TOTAL
2819.00+impuestos
216.34 +impuestos
* Vigencia: Los precios tendrán una vigencia de 30 días naturales
Estimando que el costo total del prototipo de interpretación del movimiento humano sea vendido en un aproximado de $ 59855.20 MXN o su equivalencia en dólares norteamericanos ($ 4593.62 USD).
Conclusiones.
Se logró el objetivo principal de este proyecto con una exitosa elaboración del prototipo de interpretación al movimiento humano, donde se concluyen los siguientes puntos:
Los sensores de aceleración elaborados con tecnología micromecánica, ya sea de material semiconductor (MEMS) o material capacitivo (G-CELL), otorgan una precisa respuesta que puede ser interpretada de manera digital por los microcontroladores.
Los microcontroladores ATMega8 resultaron ser confiables para el proceso de codificación y comunicación mediante el protocolo de la USART, para los circuitos de transmisión y recepción de datos.
Los circuitos RCR-433-RP, RCT-433-AS demostraron asegurar la comunicación por radiofrecuencia de los datos sin error alguno.
Las antenas mostraron su capacidad de alcance de transmisión y recepción de datos, por su impedancia de 50 ohms.
Recomendaciones:
El diseño de este prototipo puede ser ampliado aplicando más sensores MEMS, para las demás articulaciones que son codo y hombro del paciente, que representan una terapia de brazo completo.
El diseño de este prototipo puede ser utilizado también en la industria como un control para polipastos en zonas dañinas para la salud, ya que cuenta con todo el control para el movimiento de ello.
Bibliografía.
Joe Pardue. “C Programmingfor Microcontrollers”. Smiley Micros. 2005.
Mohamed Gad-el-Hak. “The MEMS Handbook”. CRC Press. 2001
Revistas y Conferencias (Abstracts)
“Implementation of accelerometer sensor module and fall detection monitoring system based on wireless sensor network”. Proceedings of the 29th Annual International. Conference of the IEEE EMBS. Cité Internacinale, Lyon, France. August 23-26, 2007.
“A 3-axis acceleration sensor data acquisition instrument system”. IMTC 2004-Instrumentation and Measurement. Technology Conference. Como Italy, 18-20 2004.
“Wireless Static Hand Gesture Recognition with Accelerometers - The Acceleration
Sensing Glove”. Seth Hollar, John Kangchun Perng, Kristofer S. J. Pister. Berkeley Sensor & Actuator Center. University of California, Berkeley.
Manuales y Hojas de Especificación.
RADIOTRONIX TM RCT-433-RP, RCT-433-AS.
http://www.radiotronix.com/products/proddb.asp?ProdID=189
http://www.radiotronix.com/products/proddb.asp?ProdID=148
MOTOROLA FREESCALE SEMICONDUCTOR, INC. ACELEROMETER MMA2260D.
MICROCONTROLADOR AVR ATmega8 de 8 bits con memoria Flash programable.
http://www.atmel.com/dyn/products/datasheets.asp?family_id=607#760
C.I. L293 Driver de 4 canales con diodos de protección.
http://www.datasheetcatalog.net/es/datasheets_pdf/L/2/9/3/L293.shtml
Páginas de Internet
www.atmel.com
www.radiotronix.com
www.motorola.com
www.st.com
http://www.educarm.es/templates/portal/images/ficheros/infantil/8/secciones/27/contenidos/8 20/edinfantilpsicomotricidad.pdf
http://www.csi-csif.es/andalucia/modules/mod_sevilla/archivos/revistaense/n26/26040245.pdf
http://www.deporteyescuela.com.ar/pdf15/juepsico.pdf
http://www.efisioterapia.net/descargas/pdfs/282.pdf
http://www.revistatog.com/num6/pdfs/revision1.pdf
http://www.uclm.es/profesorado/jmfernandez/fisioterapiatro.htm
Anexo I. Diagrama a bloques de la arquitectura de los microcontroladores AVR de