“DISEÑO
DE
UN
GABINETE
DE
CONTROL
PARA
UN
SISTEMA
DE
CONTROL
DISTRIBUIDO”
TESIS
QUE
PARA
OBTENER
EL
TITULO
DE:
INGENIERO
EN
COMUNICACIONES
Y
ELECTRONICA
PRESENTA:
DULCE
TRINIDAD
SALINAS
LUNA
ASESOR:
ING.
FERNANDO
L.
SÁNCHEZ
MARTÍNEZ
INDICE
INTRODUCCIÓN ……….………..03
1. PANORAMA GENERAL DE UN SISTEMA DE CONTROL ………….…05
1.1 Sistemas de Control ……….………..05
1.1.2 Diferencias entre Control a Lazo Cerrado y Control a Lazo Abierto…………...06
1.2 Sistemas de Control Moderno ……….………..06
1. Control Centralizado o Control Digital Directo (DDC)………07
2. Control Supervisorio ……….………..08
3. Control Distribuido ……….………..11
1.3 Características Generales y Aspectos Históricos del Control Distribuido ……….………..12
1.3.1 Descripción y Características de la Arquitectura y Anillo de control ……14
2. SISTEMAS DE COMUNICACIONES EN UN SISTEMA DE CONTROL DISTRIBUIDO ………19
2.1 Comunicación entre los Diferentes Niveles de un Sistema de Control Distribuido ………19
2.1.2 Redes de Área Local en Aplicaciones Industriales ………..20
2.1.3 Ethernet TCP/IP ………..22
2.2 Entradas y Salidas de un Bus de Campo ………23
2.2.1 Field Bus: Definición y Características Generales ………..26
2.2.2 Modelo OSI/ISO ………28
2.2.3 Clasificación de Field Bus ………32
3 Planteamiento ………40
3.1 Autocad y Autocad Electrical ………40
3.2 Normas NEMA ………45
3.2.1 Protecciones NEMA ………46
3.3 Planteamiento del Problema ………...46
3.4 Diseño de los Gabinetes ………53
3.4.1 Gabinete 1: Controlador del Proceso ………54
3.4.2 Gabinete 2: Turbo Generador ………55
3.4.3 Gabinete 3: Gobernador ………55
3.4 Cableado del Gabinete ………56
Conclusiones ………57
ANEXOS Fotografías ………58
Tablas de Señales ………61
Plano 1-Plano 21 ………65
INTRODUCCION
El desarrollo industrial en los últimos años ha tenido por lo menos 2 características particulares:
- El desarrollo de procesos a gran escala. - El uso de procesadores.
Ambos desarrollos están relacionados con el control de procesos industriales y tanto la complejidad como el tamaño de los procesos se han ido incrementando de tal manera que para realizar el control de los procesos se tenido la necesidad del uso de los controladores basados en procesadores.
Los controladores deben de ser capaces de trabajar en tiempo real y responder de manera eficiente a los cambios, alteraciones e interrupciones que se presenten durante el proceso; así mismo deben de contar con entradas y salidas, análogas y digitales que puedan ser conectadas al sistema.
De acuerdo a las características y al tamaño del proceso, es el tipo de control que se realiza, siendo los Sistemas de control Distribuido el tipo de control más utilizado. Bajo esta denominación englobamos aquellos sistemas destinados al control de grandes o pequeñas plantas de procesos, fundamentalmente de tipo continuo (papeleras, cementeras, petroquímicas, energía, siderurgia...), con capacidad de llevar a cabo el control integral de la planta. Se caracterizan por un fuerte componente informático y una estructura jerarquizada.
Al realizar un sistema de control distribuido es necesario que de acuerdo a las características del proceso y una vez definidas el tipo y la cantidad de señales se pueda establecer el tipo de controladores a utilizar, así como los módulos esclavos, las fuentes de alimentación de los módulos y los controladores, así como el sistema de comunicación entre dispositivos de campo, módulos esclavos y controladores; también es necesario contar con el espacio en donde serán colocados todos estos elementos.
Para esto hacemos uso de los gabinetes de control. Estos elementos forman una de las partes más importantes en el control distribuido, pues dicho elemento será el encargado de albergar a los controladores, esclavos, dispositivos de comunicación, fuentes de alimentación y todos y cada uno de los elementos que realicen control y/o adquisición o envío de información.
considerar que el lugar en donde se coloca el gabinete no siempre responden a las necesidades del proceso y por ello no siempre esta en el lugar más protegido de las condiciones antes mencionadas.
El diseño de gabinetes, deberá estar basado no solo en los componentes que lo integran (módulos, fuentes, etc.); el diseño deberá estar también bajo un estricto control de normas y estándares que permitan al cliente encontrar el diseño de gabinetes que se adapte mejor al proceso que el necesita, para este caso se cuentan con los estándares NEMA (Nacional Electrical Manufacturers Association), que son los encargados de regular la fabricación de los gabinetes de control.
Gráficamente el diseño de los gabinetes de control puede ser realizado por software propios de las empresas dedicadas hacer el control distribuido gabinetes de control, o bien por software de propósitos generales como lo es Autocad, que permiten visualizar al cliente no solo el arreglo de los gabinetes, si no también las medidas y las configuraciones de los módulos de control que operan en el sistema.
1. PANORAMA GENERAL DE UN SISTEMA DE CONTROL
OBJETIVO: Para realizar un sistema de control de procesos, es necesario conocer los conceptos específicos del tipo de sistema de control que queremos realizar, así como la parte del proceso del proceso de control, sobre la que vamos a trabajar.
En este capítulo se hace un resumen de los distintos sistemas de control que se pueden implementar en un proceso industrial, con el fin de conocer los elementos que serán tomados en cuenta para la construcción de un gabinete de control, que es el objetivo final del presente trabajo.
1.1 Sistemas de Control
Los sistemas de control de procesos se definen como los encargados de vigilar los procesos de la planta a través de redes de controladores (computadoras, microprocesadores, microcontroladores, etc.) interconectados que permiten mantener las condiciones necesarias para evitar o regular las perturbaciones que puedan ocurrirle al proceso.
El sistema de control es responsable de tareas tales como el monitoreo y corrección, de los errores que presenten las señales que conforman el proceso.
Básicamente existen dos tipos de sistemas de control:
¾ Sistema de control a lazo abierto.
En este tipo de sistemas, el control del proceso, solo actúa sobre la señal de entrada del sistema, dando como resultado una señal de salida independiente en la cual no hay una forma de verificar si la salida del proceso es correcta.
¾ Sistema de control a lazo cerrado.
[image:7.595.109.478.215.285.2]En este tipo de sistemas, existe una relación entre la señal de entrada y la señal de salida, por lo que la acción de control está en función de la diferencia de ambas señales.
Fig.1.2 Diagrama a bloques de un sistema de control en lazo cerrado
1.1.2 Diferencias entre Control a Lazo Cerrado y Control a Lazo Abierto
Una ventaja del sistema de control en lazo cerrado, es que la retroalimentación, retorna la respuesta del sistema sensible a las perturbaciones externas y a las variaciones internas en los parámetros del sistema, ya que la acción de control se realiza directamente sobre la diferencia que hay entre las señales de entrada y salida, buscando siempre que esta diferencia tienda a ser cero. Esta diferencia es conocida como el error.
Desde el punto de vista de la estabilidad, el sistema de control en lazo abierto es más fácil de desarrollar, por que la estabilidad del sistema no es un problema importante, por otra parte, la estabilidad es una función principal en el sistema de control en lazo cerrado, lo cual puede conducir a corregir el exceso de error que producen las variaciones en las señales del sistema.
1.2 Sistemas de Control Moderno
En la actualidad, se manejan distintas técnicas de control, que responden a las necesidades de los procesos industriales que se desarrollan hoy en día. La mayoría de estos sistemas incluyen el uso de procesadores digitales como controladores del proceso, y el uso de cada modelo de control es elegido de acuerdo a las características del proceso y a los costos de implementación.
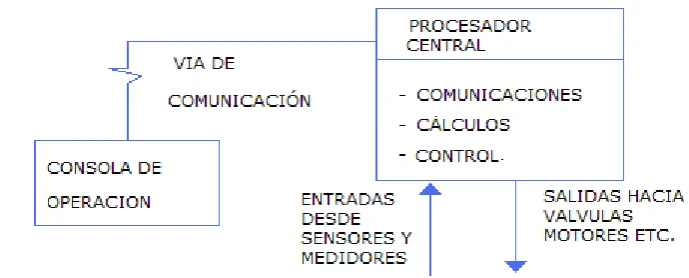
1. Control Centralizado o Control Digital Directo (DDC):
[image:8.595.118.463.293.432.2]Un sistema basado en este modo de control, está estructurado en torno a un procesador digital que recibe todas las entradas del proceso (variables), ejecuta los cálculos apropiados y produce salidas que se dirigen hacia los actuadores o dispositivos finales de control. El procesador digital puede controlar un elevado número de lazos y variables, además de ejecutar estrategias de control. En la figura 1.3 se muestra un diagrama de control centralizado.
Fig. 1.3 Sistema de control digital directo
El manejo de todas las comunicaciones y de las funciones de control para cada uno de los lazos del proceso, impone unas estrictas condiciones a la capacidad de procesamiento del procesador, así como a su velocidad. Si lo anterior fuera poco, el procesador central también deberá adquirir datos, visualizarlos en pantallas, ejecutar software que permita optimizar los esquemas y otras tareas más. Como consecuencia de todo esto el control centralizado mediante un procesador requiere un equipo grande que ofrezca el compromiso entre respuesta en tiempo real (velocidad) y capacidad de almacenamiento.
Finalmente, la ampliación de un sistema de control DDC suele resultar costosa, de ahí que inicialmente se debe instalar un equipo sobredimensionado, ya que de otro modo pronto habría que adquirirse un procesador de mayor capacidad. Además cada una de las entradas y salidas que se añadan habrán de ser cableadas hasta el procesador central, o como mínimo hasta un punto próximo a él, a todo ello habría que unir el hecho de que el software deberá reescribirse para incorporar estas ampliaciones/modificaciones.
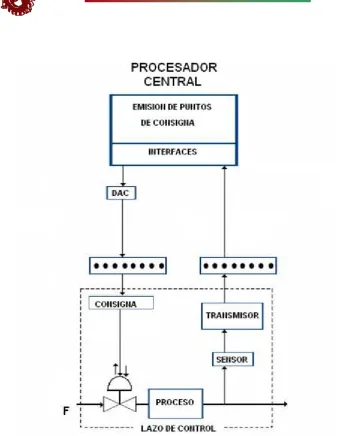
2. Control de Supervisorio
Para dar a los sistemas de control centralizado un nivel de seguridad adecuado y evitar que una “caída” de este paralice todo el sistema, se empezaron a utilizar controladores analógicos vinculados directamente al proceso, esto es, optimizados para la variable que deben de controlar. Estos controladores serán los que realmente controlen el proceso, dejando al procesador central la función de los cambios de puntos de consigna, es decir, el valor de referencia con el que se ha de comparar la variable controlada para mantenerla siempre optimizada.
Fig. 1.4 Componentes de un sistema de control de supervisión
Aunque el control supervisión permite que el control básico del proceso continúe a pesar del posible fallo del procesador central, sigue siendo necesaria una ampliación del cableado y un software adicional en caso de querer ampliar el número de entradas y/o salidas.
analizar las señales de entrada y salida del proceso, para así poder enviar la consigna correspondiente para mantener al proceso en un funcionamiento correcto.
Dado que los sistemas de control de supervisión, pueden estar formado por distintos sistemas de control, en los que se manejan niveles administrativos, y nuestro objetivo es solo la parte del proceso industrial, es necesario conocer los sistemas de control que pueden incluirse dentro del sistema supervisión.
¾ Sistemas SCADA: Viene de las siglas “Supervisory Control And Data Adquisition”, es decir adquisición de datos y control de supervisión. Se trata de una aplicación especialmente diseñada para funcionar sobre procesadores en el control de la producción, proporcionando comunicación con los dispositivos de campo y controlando el proceso de forma automática desde la estación de trabajo.
¾ Controlador Lógico Programable (PLC). Se trata de un dispositivo electrónico que como su nombre lo indica, esta diseñado para programar y controlar procesos secuenciales en tiempo real.
En todo caso, independientemente del tipo de control utilizado, los objetivos del control de procesos pueden resumirse en:
a) Operar en forma segura y estable.
b) Diseñar sistemas de control que el operador pueda vigilar, comprender y cuando sea necesario, manipular.
c) Evitar desviaciones importantes de la señal de salida, respecto a la señal de entrada, durante las perturbaciones.
d) Permitir que el operador cambie un valor deseado o punto de consigna (valor de referencia) sin perturbar el proceso.
e) Evitar cambios considerables y rápidos en variables manipuladas que podrían incumplir restricciones de operación, o perturbar unidades integradas o situadas en lazos de control inferiores al lazo principal.
3. Control Distribuido (DCS):
Es un sistema de control de procesos dinámicos, en los cuales se tiene una serie de controladores realizando el control a un nivel de área local (módulos esclavos), y cuya información es procesada por un controlador central (maestro), colocado en un nivel jerárquico superior.
El control distribuido es el paso siguiente en la evolución de los sistemas de control que se han expuesto en el punto anterior. Así en los sistemas centralizados, su potencial se concentra en un único elemento (el procesador central), mientras que en el control distribuido la potencia de tratamiento de la información se encuentra repartida en el espacio. Podríamos decir que los sistemas de control distribuido fueron desarrollados para proporcionar las ventajas del control centralizado pero con más seguridad y flexibilidad.
En esencia, la diferencia entre el control distribuido y el control clásico puede compararse a la existente entre una máquina cuya configuración se hace mediante el cambio de cables y otra donde cualquier modificación se hace por software y a distancia. En este aspecto un procesador personal (PC) es un elemento fundamental, tanto a nivel de planta como en niveles superiores y permite la visualización de las señales de múltiples variables, el diagnostico de cada lazo de control, el acceso a los datos básicos de calibración y a los datos de configuración de los transmisores.
Estos algoritmos pueden configurarse y en caso de avería, en las unidades de control que se encuentran en un nivel jerárquico superior a los esclavos (maestros), el control que ejercerá el regulador digital será el correspondiente al último algoritmo configurado: tipo de control (directo, inverso, etc.), tipo de señal de entrada (lineal, exponencial, etc.), alarmas a generar, sensores a muestrear, etc. Como vemos en este controlador básico se establece ya el primer paso en la dotación de cierta autonomía a los diferentes elementos de un control distribuido.
La red de comunicación externa suministra los datos necesarios que definen el comportamiento del controlador. Estos datos externos junto a los propios de proceso se optimizan, obteniéndose primero los parámetros que se introducen en el algoritmo de regulación y en función de la señal de referencia, permitirán enviar al proceso la actualización correspondiente.
Normalmente la optimización suele ser un acondicionamiento de señal más o menos complejo: ADC/DAC, conversión V/F, variación de nivel, comparación, etc.
Controlador Esclavo: Es un dispositivo de entradas y salidas utilizado para recolectar y accionar las señales de proceso de los elementos finales de control
Utiliza en su programación un lenguaje de alto nivel y permite controlar procesos complejos. El controlador esclavo suele estar constituido por un procesador digital con elevada capacidad operativa y de comunicación.
1.3 Características Generales y Aspectos Históricos del Control Distribuido
En el pasado un sistema de control era considerado como una caja negra, aislada física y temporalmente de la adquisición de datos, procesamiento de la información, y del sector de administración y toma de decisiones de la empresa.
El sistema de control distribuido debe de proponer una arquitectura que permita integrar el control del proceso con el sector de administración de la empresa. Esto facilita la aplicación de técnicas avanzadas de gestión (Planificación-Organización y Control) que implican la adquisición (en tiempo real) de datos del proceso, la integración con otros datos propios de la administración y la posterior toma de decisiones en función de estos últimos.
La aplicación de estándares industriales en el diseño del sistema, debe de facilitar la creación de poderosas herramientas en gestión, y la incorporación de sistemas existentes.
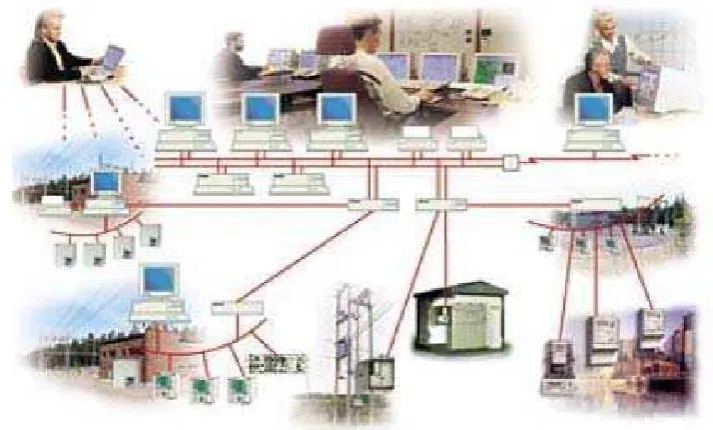
[image:14.595.115.472.391.606.2]Así mismo el sistema de control distribuido de acuerdo a las necesidades de la empresa, debe contar con una avanzada tecnología para la fabricación de software y hardware.
Fig. 1.5 Ejemplo de un sistema de control distribuido
Dentro de los esfuerzos de investigación dedicados a la resolución del problema de control, y teniendo en cuenta el desarrollo de los procesadores digitales (microprocesadores y micro controladores) por un lado y el rápido avance en los procesos industriales por otro, se ha llegado a las siguientes conclusiones generales:
controlar individualmente un cierto número de variables, para así “distribuir”, el riesgo del control único.
b) La velocidad en la adquisición de datos y su salida hacia los actuadores debe ser en “tiempo real”, lo que obliga a utilizar la tecnología más avanzada en procesadores digitales.
c) Para comunicar entre si los transmisores de campo (que suministran datos) los controladores y las interfaces para la comunicación con el operador de la planta se han creado distintos protocolos de comunicación que se utilizan de acuerdo al tipo de proceso y al presupuesto del proyecto de control.
d) El panel clásico requerido por el control tradicional, se ve reflejado por una o varias estacione de monitoreo llamadas HMI (Human Machine Interfaz), en los cuales, el operador con la ayuda de una computadora, podrá examinar las variables de proceso, las características de control, las alarmas, etc., sin perturbar el control de la planta y con la opción de poder cambiar cualquiera de las características de control, en las variables de proceso. La norma de ISA establece que las pantallas deben ser de pantalla táctil y ahora son lo que llamamos instrumentación virtual
e) Para albergar a los controladores, esclavos y fuentes de alimentación que actúan en el control, se cuenta con los gabinetes de control, estos aíslan a los componentes de cualquier perturbación que pueda dañar al proceso o a los componentes, así mismo se cuenta con protocolos y normas que rigen su construcción.
Con la combinación de las características anteriores, el Primer Sistema de Control distribuido para la industria, apareció en noviembre de 1975, bajo el nombre de TDC 2000 y pertenecía a Honeywell.
1.3.1 Descripción y Características de la Arquitectura y Anillo de Control
En la parte operativa (Control y Administración de la Planta) tenemos los dispositivos de hardware y software que brindan la información necesaria para llevar acabo las operaciones de la planta, con una interfase entendible para el operador.
Fig. 1.6 Arquitectura típica de un sistema de control distribuido
En la parte de control (Control y Mantenimiento del Área) encontramos a los dispositivos de control (microprocesadores, sensores, actuadores, PLC´s que permiten el proceso se lleve acabo.
Combinando los conceptos de lazo de control y comunicaciones industriales, un sistema de control distribuido (DCS) consta de uno o más niveles de control, los cuales, están vinculados con el fin de ejecutar conjuntamente tareas complejas con un máximo de efectividad y una elevada optimización en el uso de recursos.
encontramos a los elementos encargados de controlar y ajustar el proceso, así como los sistemas de comunicación entre el proceso y el operador.
[image:17.595.100.484.255.574.2]Siguiendo esta estructura, podemos dividir la arquitectura de un DCS en los 4 niveles que mostramos a continuación. Cada nivel está diseñado de forma tal que optimiza las prestaciones al proceso y asegura la integridad de la información procesada.
Fig. 1.7 Niveles, conexiones y elementos que intervienen en un sistema de control distribuido
1. Dirección de la Producción (Sistemas de Comunicación e interfase con el Operador)
2. Mando de Grupos (Controladores maestros, PLC)
¾ NIVEL 1
En este nivel y a través de una red informática de comunicación se realiza el intercambio de información entre los nodos del sistema de control que cumplen con las diferentes funciones a realizar:
- Nodos donde se encuentran las estrategias de control (Unidad Controladora del Proceso).
- Nodos de interfase con el operador (Sistema de Interfase con el Operador) - Nodos de oficina técnica para configuración y mantenimiento del sistema
(Estación de Ingeniería) Nodo de sistemas de terceros
Por último, es necesario destacar que el sistema de comunicaciones deberá estar basado en el modelo de comunicaciones ISO-OSI, con especial énfasis en la integridad de datos.
¾ NIVEL 2
Suele denominarse generalmente de control y regulación. En este nivel se encuentra
la interfase de operaciones de cada uno de los procesos controlados.
El sistema debe de contar con una gran variedad de módulos inteligentes, utilizados para implementar las estrategias de control. Los módulos pueden ser programados en diferentes lenguajes tales como bloques de funciones, lenguaje C, Basic, y otros desarrollados especialmente para aplicaciones particulares.
La mayoría de sistemas de control distribuido tienen la posibilidad de realizar configuraciones redundantes, con lo cual se aumenta la confiabilidad del sistema.
¾ NIVEL 3
Los módulos esclavos realizan las tareas de conversión analógica/digital y acondicionamiento de señales, poniendo las mismas a disposición del nivel superior.
¾ NIVEL 4
los controladores. La comunicación entre ellos también debe de responder a estándares y normas ya establecidos para este tipo de dispositivos.
Entre los dispositivos de control más comunes que se manejan se encuentran los Termómetro bimetálicos, o termopares, las resistencias termodinámicas, etc., para medir temperatura. Se cuentan con sensores electrónicos, diafragmas, manómetros, entre otros, para medir presión. Bombas dosificadoras, Tubos venturi, Placas de Orificio, etc., para medir flujo.
2 SISTEMAS DE COMUNICACIÓN EN UN DCS
OBJETIVO: En la actualidad el diseño de cualquier sistema de control se hace tomando en cuenta los protocolos de comunicación que se utilizaran en el proceso, pues estos también añaden costos y materiales extras al proyecto. En el presente capitulo se presentan los protocolos más utilizados en el diseño de control de procesos industriales
2.1 Comunicación entre los Diferentes Niveles de un Sistema de Control Distribuido
Como se ha podido ver a lo largo de los puntos desarrollados hasta aquí, los sistemas de control distribuido (DCS) dependen de la comunicación entre los diferentes equipos y dispositivos, situados en muchos casos en diferentes niveles de control. Cualquier nivel superior a los esclavos debe ser capaz de interrogar y dirigir dispositivos de niveles inferiores y comunicarse eficazmente con dispositivos situados al mismo nivel o superior. Con todo ello, lo que se pretende es dar la certeza de que todos los componentes de un DCS están conectados sobre una única vía de comunicación aunque en la realidad se haga uso de puertas de enlace a la red (gateways) que
comunican los distintos niveles y elementos.
Un sistema de control distribuido no tiene por que constar siempre de una estructura de cuatro niveles, como se comento anteriormente, ya que su complejidad dependerá, esencialmente, de los procesos a controlar y de la complejidad de estos. El utilizar una o varias rutas de datos (redes de comunicación industrial) estará condicionado por los aspectos comentados anteriormente y por cuestiones como la antigüedad de los equipos que deben coexistir, ámbito de cobertura del DCS, grado de automatización de la planta, etc. En todo caso, no debemos olvidar las ventajas de comunicar todos estos equipos en lo que constituye un DCS y que son, esencialmente, las siguientes:
A) Posibilidad de intercambio de información entre equipos y módulos electrónicos que controlan fases sucesivas de un mismo proceso global.
del operador humano en forma interactiva a través de una terminal con teclado y monitor de pantalla táctil.
C) Adquisición de datos de sensores y procesamiento de los mismos con vistas al control de calidad, gestión, estadística u otros propósitos.
D) Facilidad de cambios, o lo que es lo mismo, flexibilidad en las áreas de fabricación para adaptarse a la evolución y a la diversificación de los productos. Como ejemplo típico basta pensar en la industria del automóvil, sometida a una continua evolución de modelos y variantes.
E) Posibilidad de utilizar lenguajes de alto nivel, que permitan tratar bajo un mismo entorno todas y cada una de las áreas automatizadas, desde la fase de diseño hasta la fase de explotación y gestión.
La clave para llegar a obtener todas estas ventajas está en un sistema de comunicación poderoso, robusto, y a la vez flexible, que permita integrar en él dispositivos de cualquier fabricante, siempre que cumpla con alguno de los estándares abiertos. Aparte de los sistemas de comunicación específicamente industriales, las redes de área local tienen mucho que decir en éste sentido.
2.1.2 Redes de Área Local en Aplicaciones Industriales
En cualquier sistema de automatización es necesario un intercambio de datos, la mayoría de las veces este intercambio debe realizarse entre dispositivos de diferentes fabricantes o de diferente fabricación por tecnología.
La tendencia actual de la fabricación de DCS se encamina hacia una integración de tal forma que, en ningún momento, los equipos que la componen sean considerados como aislados, si no que todos estén capacitados para poder realizar un intercambio de información de tal forma que se pueda realizar un análisis estadístico de producción, horas de funcionamiento de cada una de las máquinas, realización de mantenimientos preventivos, etc. Dicho de otra forma, hoy en día todo sistema de control por pequeño que sea contiene como elemento adicional una PC o un monitor en el que es posible observar todos los datos antes mencionados.
nivel de jerarquía de comunicación sea suficiente para conseguir óptimos resultados; pero si hablamos de sistemas más complejos y por tanto de plantas extensas, la tendencia de comunicación vendrán dada por un sistema de niveles de control.
Pues bien, la redes de área local industriales (LAN Local Área Network), intentanque la comunicación entre todos los niveles sea completa, es decir, que los niveles más altos puedan saber en todo momento que es lo que están realizando los niveles más bajos, y en caso necesario poder dar órdenes hacia ellos. Para ello es necesaria una red única que recorra todos los niveles implicados.
En la figura 2.1 se muestra la solución dada en este sentido por la empresa alemana Siemens mediante su red Ethernet TCP/IP desarrollada para facilitar la interconexión tanto de equipos propios como de otros fabricantes dentro de los niveles superiores de un DCS.
Fig. 2.1 Estructura de comunicaciones entre los niveles de un DCS propuesta por SIEMENS.
El MAP fue un primer intento de estandarización a nivel global impulsado por General Motors y que a la larga se convirtió en un modelo que han ido adoptando múltiples fabricantes de equipos de control y automatización.
El MAP es un protocolo pensado para redes más o menos grandes, pero sobre todo usando redes LAN, por lo que resulta excesivamente caro y complejo para aplicaciones pequeñas.
2.1.3 Ethernet TCP/IP
Ethernet TCP/IP se encuentra dentro de los estándares de la IEEE (Instituto de Ingenieros de Electricidad y Electrónica) como la especificación 802.3.
En el estándar IEEE, los dispositivos de red se definen como equipos terminales de datos (DTE). Cada terminal de datos conectado a la red Ethernet debe de estar equipado con una interfaz de red que permita una conexión con el canal de comunicación. Esta terminal contiene los componentes electrónicos y el software necesario para realizar las funciones necesarias para enviar una trama Ethernet a través de la red.
Una de las ventajas principales de Ethernet TCP/IP frente a otras redes es que "es estándar, y no está basado en estándares”. Este sistema utiliza hardware estándar basado en conmutadores estándar con herramientas de administración estándar. Otros protocolos emplean tecnología estandarizada, pero cuanto más se baja en la infraestructura, menos estándar es y más propiedades exclusivas encontramos. Gracias a esta arquitectura estándar, Ethernet TCP/IP facilita la combinación de controles industriales comerciales, empresariales y en tiempo real en la misma red, y resuelve problemas con componentes estándar cuando otras soluciones imponen terminales personalizadas.
El medio de transporte para las señales entre los dispositivos que estén conectados es el cable par trenzado y la fibra óptica dependiendo del tipo de Ethernet al que nos vamos a conectar. Siendo mediante par trenzado con terminal UTP par Ethernet 10Mbits y fibra óptica con terminal ST o SC para Ethernet de 10Gbits.
Las redes Ethernet deben ser conectadas en topología de estrella para dar mayor seguridad al manejo de la información y no haya pérdida de información si falla alguno de los dispositivos que están conectados a la red.
2.2 Entradas y Salidas de un Bus de Campo
permita enlazar periféricos de bajo nivel a un controlador maestro. Este, a su vez, puede disponer de un interfaz de enlace con una red LAN. Esta red local de nivel inferior se denomina Bus de Campo (FieldBus).
El bus de campo constituye el nivel más simple y próximo al proceso dentro de la estructura de comunicaciones industriales. Está basado en procesadores simples y utiliza un protocolo mínimo para gestionar el enlace entre ellos. Como veremos a continuación, este último hecho no le resta la fiabilidad y posibilidades de expansión necesarias a este nivel, pues de hecho, los buses propuestos más recientemente contemplan la posible integración del bus a una estructura de comunicaciones jerárquicamente superior y más potente, tal como se requiere en los sistemas de control distribuido.
Con la aparición de los buses de campo el esquema se simplifica considerablemente y el añadir un nuevo elemento de campo tan sólo supone efectuar una simple conexión
[image:25.595.93.517.468.692.2]a dicho bus, que normalmente estará próximo al citado elemento. Esto puede observarse en la figura 2.2.
Fig. 2.2 Topología de un bus de campo (Nivel de Planta o Proceso)
* Reparto de la capacidad de proceso a nivel de planta, facilitando la comunicación de datos entre dispositivos de elevada funcionalidad (PLC’s, controladores, etc.)
* Un sistema digital de transmisión de señal que incrementa la seguridad y confiabilidad ante pequeñas señales procedentes de transductores y que están sometidas al ruido eléctrico típico de los ambientes industriales.
* Una interfase que unifica la heterogeneidad de dispositivos, bien por su naturaleza, bien por su procedencia. Una especificación (estándar) de bus soportada por distintos fabricantes, permitirá la interconexión de sus equipos.
A las ventajas anteriores se pueden añadir otras que resultarán más o menos tangibles para el usuario, pero que si el bus de campo es seleccionado correctamente para adecuarse a la aplicación, se manifestarán siempre de forma positiva, tanto en términos productivos como de costos:
* Reducción de la complejidad del sistema de control en términos de
necesidades de hardware, ya que el número de controladores lógicos, PLC’s, módulos de E/S, etc. se verá reducido, por lo que el área requerida para el montaje del hardware será menor.
* Instalación y mantenimiento. Al reducirse los requerimientos de hardware
también se reducen los costos y tiempos de instalación, mantenimiento y mano de obra. Afrontar nuevas instalaciones es mucho más rápido, sencillo y seguro, así como las tareas de diagnóstico y verificación de errores de conexión.
* Proyecto y diseño. Como consecuencia de la disminución de la complejidad
del sistema de control, el proyecto y diseño resulta mucho más sencillo, rápido y barato, reduciéndose drásticamente el número de elementos que aparecen en los diagramas y esquemas: instrumentos, cajas de conexión y terminales, cableados, etc.
* Posteriores modificaciones, ampliaciones y rediseños se llevan a cabo con
mayor facilidad y economía.
* La selección de un bus de extendido reconocimiento y aceptación, permite
intercambiar equipos de planta entre dispositivos de diferentes fabricantes, sin
* Los tiempos de mantenimiento y pérdidas de producción son reducidos,
debido a la existencia de procedimientos y herramientas de alto nivel para diagnóstico y búsqueda de errores.
2.2.1 Field Bus: Definición y Características Generales
El field bus (en inglés) es la suma de un protocolo y una tecnología de comunicación cuyo resultado es una red industrial de carácter digital y que transporta información. El
protocolo, la corta longitud de los datos y la velocidad de transmisión que alcanza (1Mbit/s) le hace ideal para comunicar dispositivos y equipos de campo en tiempo real.
Así, inicialmente era utilizado como medio de comunicación entre sensores, actuadores, controladores digitales básicos y PLC’s de clase baja; pero debido a la mejora en la velocidad de transmisión y la mínima tasa de errores, el bus de campo ha pasado a ser considerado como una red local en los entornos de planta, por lo que
suele verse haciendo funciones que antes correspondían exclusivamente a las redes LAN.
Dando por hecho que un bus de campo aporta a las comunicaciones industriales todo lo anteriormente citado, se le debe exigir, además:
- Interconectividad: equipos de diferentes fabricantes pueden ser conectados
físicamente a un mismo bus.
- Interoperabilidad: posibilidad de intercambiar con éxito información entre
equipos de diferentes fabricantes.
- Intercambiabilidad: equipos de cualquier fabricante pueden ser reemplazados
por equipos funcionalmente equivalentes de otros fabricantes.
El mejor aval para que un bus de campo cumpla con los requisitos anteriores será respetar la estructura de niveles OSI (Open Systems Interconnection)
las grandes redes. Todo ello no debe suponer una pérdida importante de velocidad, ni tampoco un incremento de precio y complejidad no justificables.
Las características generales más comunes de los buses de campo son las siguientes:
[image:28.595.114.388.344.601.2]- Los estándares de comunicación a nivel de bus de campo suelen cubrir sólo una parte del modelo OSI, concretamente los niveles 1 (físico), 2 (enlace) y en algunos casos el 7 (aplicación). El resto de niveles no son imprescindibles para una red de tipo muy local, donde los medios de conexión son de uso exclusivo y la estructura lógica es única. Sólo algunas funciones que se podrían considerar propias de los niveles 3 (red) y 5 (sesión) se añaden a los niveles 2 y 7 para enlazarlos entre sí. (Figura 2.3).
Fig. 2.3 Fieldbus según el modelo de niveles o capas ISO/OSI
En general, las especificaciones de un determinado bus admiten más de un tipo de conexión física de entre las normalizadas.
Lo que realmente define el tipo de bus y le da nombre, son los dos grupos en que se dividen las tareas asignadas al nivel de enlace de datos del modelo OSI (nivel 2): MAC
(Control de Acceso al Medio) y LLC (Control de Enlace Lógico). Dicho protocolo suele incluir también un soporte, más o menos rudimentario, para la capa o nivel de
NIVEL 7 APLICACIÓN
Funciones y Librerías estándar
Microprocesador/Microcontrolador
NIVELES 3-6
NIVEL 2 LLC: Control de Enlace Lógico MAC: Control de Acceso al Medio
NIVEL 1 FÍSICO
aplicación (7), que consiste en la definición de una serie de funciones y servicios de la red mediante códigos de operación estándar.
El nivel de aplicación (7), dirigido al usuario, suele ser propio de cada fabricante, apoyándose en las funciones estándar antes mencionadas para crear programas de gestión y presentación casi siempre dedicados a una gama específica de productos. A lo sumo, el software de aplicación es abierto y permite la programación en un lenguaje estándar para que cada usuario pueda configurar el nivel de presentación a su conveniencia, basándose en librerías estándar.
En la mayor parte de los buses de campo, el protocolo está previsto para gestionar una red con estructura lógica de tipo maestro-esclavo, donde el control de la red lo tiene siempre el maestro.
Poseen mecanismos de control de errores muy optimizados y redundancia para evitar fallos que dejen al bus fuera de servicio.
2.2.2 Modelo OSI/ISO
En el modelo OSI se consideran siete niveles, en cada uno de ellos se procesan unidades de información denominadas PDU (Unidad de datos de protocolo). En los procesadores emisores las PDU se transmiten del nivel superior al inferior, y en cada uno de ellos se añade información de control. En los procesadores receptores la información se procesa desde el nivel inferior, comprobando y eliminando en cada nivel las terminales de cada PDU correspondiente a dicho nivel.
Las funciones de cada nivel son:
• TELNET: Es una aplicación que permite desde nuestro sitio y con el teclado y la pantalla del procesador, conectarnos a otro procesador remoto a través de la red.
• FTP: Es una herramienta que te permite, a través de la red, copiar ficheros de un procesador a otro.
• SMTP: Es un servicio de correo a través de servidores, usando un protocolo estándar para enviar y para recibir el correo.
• POP3: Protocolo POP (Protocolo de oficina de correos), permite recoger el
correo electrónico en un servidor remoto.
• DNS: El servicio permite, una vez configurado, que tu web y tu correo electrónico sean localizados desde cualquier lugar del mundo mediante tu nombre de dominio.
• RTP: (Real-Time Transfer Protocol) se utiliza para encapsular VoIP paquetes de datos dentro de paquetes UDP.
• HTTP: Protocolo de Transmisión Hipertexto. Protocolo de comunicaciones utilizado por los programas clientes y servidores de WWW para comunicarse entre sí.
¾ Nivel 6: Capa de presentación. Trata de homogeneizar los formatos de representación de los datos entre equipos de la red.
Para homogeneizar la representación de datos (Textos, Sonidos, imágenes, valores numéricos, instrucciones), la capa de presentación interpreta las estructuras de las informaciones intercambiadas por los procesos de la aplicación y las transforma convenientemente.
Puede realizar transformaciones para conseguir mayor eficacia en la red (compresión de texto y cifrado de seguridad). Los programas del nivel 6 suelen incluirse en el propio Sistema Operativo.
¾ CAPA 5: Capa de sesión. Cuando se realiza una transferencia entre dos procesadores se establece una sesión de comunicaciones entre ambos. La capa de sesión es responsable de:
• Actuar de interfaz entre el usuario y la red, gestionando el establecimiento de la conexión entre procesos remotos.
• Establecer un dialogo entre dos equipos remotos para controlar la forma en que se intercambian los datos.
• Identificar los usuarios de procesos remotos
Cuando se corta la conexión de forma anormal, en la capa de transporte o en inferiores, la capa de sesión puede encargarse de restablecer la sesión de forma transparente al usuario.
Su función es aumentar la fiabilidad de la comunicación obtenible por las capas inferiores, proporcionando el control de la comunicación entre aplicaciones al establecer, gestionar y cerrar sesiones o conexiones entre las aplicaciones que se comunican.
¾ CAPA 4: Capa de Transporte. Se encarga del transporte de la información, desde la fuente al destino, a través de la red.
¾ CAPA 3: Capa de la Red.
• Se encarga de Fragmentar los segmentos que se transmiten entre dos equipos de datos en unidades denominadas paquetes. En el procesador receptor se efectúa el proceso inverso: los paquetes se ensamblan en segmentos.
• Realizar el enrutamiento de los paquetes. Se encargará de realizar algoritmos eficientes para la elección de la ruta más adecuada en cada momento, para reexpedir los paquetes en cada uno de los nodos de la red que deba atravesar.
• Prevenir la producción de bloqueos así como la congestión en los nodos de la red de transporte que pudiesen producirse en horas pico por la llegada de paquetes en forma masiva.
¾ CAPA 2: Capa de enlace de datos. Descompone los mensajes que recibe del nivel superior en tramas o bloques de información, en las que añade una terminal de control e información redundante para control de errores. La terminal de control suele contener información de direcciones de origen y destino, ruta que va a seguir la trama, etc. También se encarga de transmitir sin error las tramas entre cada enlace que conecte directamente dos puntos físicos (nodos) adyacentes de la red, y desconectar el enlace de datos sin pérdidas de información.
¾ CAPA 1: Capa Física. Es donde se especifican los parámetros mecánicos (grosor de los cables, tipo de conectores), eléctricos (temporizador de las señales, niveles de tensión) de las conexiones físicas.
2.2.3 Clasificación de Field bus
Al ser el control de procesos industriales un mercado que genera unas grandes expectativas económicas, todos los fabricantes de equipos para este sector intentan acaparar una parte de dicho mercado para, posteriormente, intentar mantenerlo e incrementarlo por (casi) cualquier medio. Precisamente una de las formas de evitar la pérdida de clientes es creando un sistema de comunicaciones propio en el entorno industrial, optimizado perfectamente para sus equipos y prestando unos servicios excelentes: confiable, rendimiento, etc. Todo lo anterior nos sitúa ante un mercado con más de cien buses de campo, prácticamente incompatibles unos con otros, lo cual ha llevado a plantear la necesidad de crear un bus de campo estándar o normalizado. Para ello, un primer paso importante es clasificar los buses de campo en propietarios y abiertos.
Los buses de campo propietarios reciben este nombre por ser propiedad intelectual de
una compañía particular, por lo cual no se puede hacer mucho con ellos a no ser que se adquiera una licencia, las cuales son controladas a discreción del propietario, sometidas a restricciones de uso y a elevados pagos de derechos.
Los buses de campo abiertos se caracterizan por seguir criterios opuestos a los
anteriores:
- Sus especificaciones completas deben estar publicadas y disponibles a precios razonables para cualquiera que desee adquirirlas.
- Sus componentes críticos deben estar disponibles en las mismas condiciones. - Los procedimientos de validación y homologación deben estar bien definidos y abiertos a cualquiera.
Todo ello se traduce en un bus de campo que cualquiera puede utilizarlo o desarrollar productos basados en él, a un costo y esfuerzo razonable.
bastante genéricas, constituyendo esto un punto de partida importante para acercarse al tan deseado estándar.
Las condiciones fijadas como marco por el IEC son las siguientes:
1.- Nivel físico. Bus serie controlado por un maestro.
2.- Velocidades. Dos alternativas: 1 Mbit/s para distancias cortas o valores
inferiores, entre 250 Kbits/s a 64 Kbits/s, para distancias largas.
3.- Longitudes. Dos alternativas: 40 m para la máxima velocidad y 350 m para
velocidades más bajas.
4.- Número de periféricos. Máximo de 30 nodos, con posibles derivaciones,
hasta un máximo de 60 elementos.
5.- Tipo de cable. Pares de cables trenzados y pantalla (tipo de blindaje del
cable).
6.- Conectores. Bornes de tipo industrial o conectores tipo DB9
7.- Conexión/desconexión “on line”. La conexión y/o desconexión de algún
nodo o derivación no debe interferir el tráfico de datos.
8.- Topología. Bus físico con posibles derivaciones hacia los nodos o
periféricos.
9.- Longitud de derivaciones. Máxima longitud de las derivaciones de 10 m.
10.- Aislamientos. 500 VAC permanentes entre elementos de campo y bus.
Tensión de prueba 1500 VAC./1 min.
11.- Seguridad intrínseca. Opción a conectar elementos de campo con
tensiones reducidas para atmósferas explosivas, evitado así daños a los dispositivos de la red, ya sea por interferencias, temperaturas y tensiones superiores a las que pueda soportar el dispositivo, etc.
12.- Alimentación. Opción de alimentar los elementos de campo a través del
bus.
13.- Longitud de mensajes. Mínimo 16 bytes por mensaje
14.- Transmisión de mensajes. Posibilidad de dialogo entre cualquier par de
nodos sin repetidor. Esto no excluye, sin embargo, la posibilidad de que la comunicación se haga a través de un maestro ni tampoco excluye el empleo de repetidores transparentes para incrementar las distancias de transmisión.
16.- Implementación de protocolo. Los circuitos integrados que implementen el
protocolo (tranceivers o transceptores) deben estar disponibles comercialmente y ser de dominio público (no protegidos por patentes de exclusividad).
Se puede observar que las especificaciones son bastante detalladas a nivel físico, pero deja muy abierto los niveles de enlace y aplicación (no se especifica la trama del mensaje ni las funciones disponibles), con lo cual y desde el punto de vista del usuario, es probable que dos nodos que cumplan las recomendaciones marco del IEC no puedan siquiera intercambiar caracteres entre sí y casi seguro que no serán capaces de intercambiar información, a menos que la estación “maestra” ejerza las funciones de pasarela. Esto es algo parecido a lo que ocurre con los canales RS-232 que se intercambian bits a nivel físico, pero que son incapaces cada uno de interpretar los mensajes del otro.
2.2.3.1 Field bus en el Mercado
A continuación se presenta una breve descripción de los buses de campo más representativos, ya sea por su volumen de implementación o bien por sus características y usos particulares.
A) PROFIBUS: Profibus (PROcess FIeld BUS) fue un proyecto conjunto financiado por el Ministerio Federal de Investigación y Tecnología de Alemania en el que participaron 18 empresas alemanas para especificar, desarrollar y probar un nuevo bus de campo digital para instrumentos y dispositivos de control en el nivel más bajo de la jerarquía de automatización y control. Sin embargo, hoy en día Profibus es un modelo de comunicación industrial de carácter internacional, estando presente en multitud de plantas distribuidas por todo el mundo. Por ello se hace necesario una gestión eficaz y rigurosa de todo lo referente a este bus de campo. Sin duda alguna, la entidad que más peso tiene para el desarrollo de éste estándar de comunicación es
Profibus Internacional, que reúne a todas las asociaciones de usuarios de Profibus y
ha establecido una certificación cualificada de los sistemas y equipos mediante un test de interoperatividad. (interconectividad + interoperabilidad + intercambiabilidad).
En los datos técnicos podemos observar la versatilidad de Profibus y el abanico de posibilidades que cubre para adaptarse a las necesidades de la comunicación
[image:36.595.83.522.191.373.2]industrial.
Fig. 2.4 Anillo de control, para profibus
¾ Datos técnicos de Profibus
Estándar: PROFIBUS según EN 50 170 Método de acceso:
Velocidad de Transmisión: 9.6 Kbits/s-12 Mbits/s
Medio de transmisión Eléctrico: Cable de 2 hilos (Coaxial). Óptico: Cables de fibra óptica (Cristal y plástico).
Sin hilos: Infrarojo.
Máximo No. De Nodos: 127
Tamaño de la Red: Eléctrica: Máx 9.6 Km (depende de la velocidad). Óptica: 150 Km (depende de la velocidad)
Topologías: Bus, árbol, estrella, anillo, anillo redundante Aplicaciones: Comunicación de proceso, campo o datos
Distancia ampliable entre repetidores hasta 10km (para el cable).
En el método de acceso podemos distinguir entre dos casos: en el primero, mediante derivaciones especiales (testigos) en el bus, las estaciones tipo master se van
estación principal o master se hace con el bus. Durante este tiempo, se encargará de
consultar a sus estaciones esclavas a la máxima velocidad posible.
¾ Perfiles de Profibus
Profibus nos ofrece tres perfiles, cada uno de ellos adaptado a unas necesidades concretas de comunicación en la planta. Así, tenemos:
Para tareas universales de comunicación: Profibus-FMS: - Comunicaciones Multimaster
- Amplia gama de comunicaciones
Para intercambio de datos rápido y cíclico: Profibus-DP - Plug & Play
- Eficiente y rentable
Para automatización de procesos en áreas con riesgo de explosión: Profibus-PA
- Alimentación vía bus - Seguridad intrínseca
B) HART: El protocolo o bus de campo Hart (Highway addressable Remote Transducer) nace con la idea de hacer compatibles modelos tradicionales en la comunicación de campo (4@20mA) con modelos mas actualizados que permitan llevar a cabo control distribuido de los procesos, es decir buses de campo. Así, aun sabiendo que estos ofrecen las máximas perspectivas en el futuro, los usuarios de numerosas plantas que todavía utilizan señales análogas de 4@ 20mA contemplan la posibilidad de grandes cambios estructurales.
De este modo se obtienen importantes beneficios:
- Se mantienen las estrategias de control actuales y los lazos de control convencionales (generalmente 4-20mA). Esto último permite mantener el cableado existente.
[image:38.595.108.496.287.594.2]- La información digital adicional transmitida a través de este protocolo: variables, medidas, rango del instrumento, información del producto, etc., se pueden utilizar durante las fases de instalación, calibración, mantenimiento y operación.
Fig. 2.5 Permite trabajar con señales analógicas y digitales al mismo tiempo
C) Fieldbus. La organización Fieldbus Foundation está formada por 120 de los
principales fabricantes y usuarios finales de la automatización y control de procesos industriales. Trabajando juntas, estas empresas han definido de forma única una normalización del bus. Pertenecer a Fieldbus Foundation permite acceder a formación,
El protocolo definido por la organización Fieldbus Foundation se denomina FoundationFieldbus, y supone la evolución tecnológica hacia la comunicación digital
en la instrumentación y en el control de procesos. Se diferencia de cualquier otro protocolo en que está diseñado para aplicaciones de control de procesos y no solo para transmitir datos en modo digital. Este protocolo es abierto, esto significa que los fabricantes con certificado Foundation Fieldbus nos proporcionan dispositivos que
podrán funcionar junto con dispositivos de otros fabricantes también certificados. Esta flexibilidad en la elección del proveedor, en un mismo sistema, sin la perdida de la más mínima funcionalidad es una ventaja para todos los usuarios.
¾ Implementación de la tecnología fielbus
Foundation Fieldbus (FF) es un sistema de comunicación totalmente digital, serie,
bidireccional, que interconecta los equipos de planta como sensores, actuadores y controladores.
Fieldbus es una Red de área local (LAN) para elementos usados en automatización de la producción con la capacidad incorporada de distribuir el control a través de la red Los dispositivos FF se conectan a la red mediante segmentos H1 que presentan las siguientes características:
- Interconexión de hasta 32 dispositivos utilizando un único par de hilos. - Alimentación de los dispositivos a través del propio segmento.
- Utilización de cableado ya existente en planta.
- Disponer de la aplicación de control en los dispositivos de campo.
Los segmentos H1 se han optimizado para cumplir con los requerimientos anteriores, por ello trabajan a una velocidad moderada. Los dispositivos también pueden conectarse a través de Fibra Óptica a los segmentos H1 y se puede convertir cable a FO en cualquier punto del segmento H1. La única consideración es que la FO no permite alimentación en el propio bus del segmento.
Los segmentos H2 se han optimizado para concentrar comunicaciones de una gran cantidad de dispositivos y para la conexión de gran cantidad de señales de I/O sencillas a través de módulos múltiples de E/S.
Los segmentos H2 utilizan el estándar ampliamente difundido Ethernet de alta velocidad o HSE (High Speed Ethernet) en configuración redundante. Estos
[image:40.595.84.508.294.531.2]segmentos trabajan a 100 Mbit/s con un conexionado de pares de cables trenzados y apantallados (STP) o mediante Fibra óptica.
Fig. 2.6 Arquitectura de red de Fundation FieldBus
3 PLANTEAMIENTO
OBJETIVO: Diseñar un gabinete de control para un proceso de control distribuido.
Hasta el momento se ha hecho una explicación generalizada de los distintos tipos de sistemas de control que son utilizados en los procesos industriales, así como los protocolos de comunicación más utilizados en el ámbito industrial.
La existencia de los diferentes tipos de control se debe a que los procesos industriales son tan variados dependiendo de su objetivo, tamaño, y variables a controlar durante el proceso.
Y la existencia de los protocolos se debe a que es la forma de estandarizar algunos aspectos del proceso, de forma tal, que aunque sean diferentes fabricantes los encargados de realizar el proceso de control, existan normas que establezcan las pautas que se deben de seguir para llevar a cabo los procesos, ya sean de comunicación o de alguna otra índole.
Económicamente hablando, algunos protocolos solo son compatibles, entre los productos de un solo fabricante, lo que obliga al cliente a que todo el equipo necesario para su proceso sea adquirido con una solo empresa.
Así pues en este trabajo se pretende realizar el diseño del gabinete de control en un proceso de control distribuido para una unidad generadora de energía.
Para ello utilizando el programa de Autocad y Autocad Electrical se hará el diseño del arreglo del gabinete en el que se plasmaran los protocolos usados así como el equipo o hardware que interviene en el proceso de control.
3.1 AUTOCAD Y AUTOCAD ELECTRICAL
Fig.3.1 Autocad Auto desk
Al igual que otros programas de diseño, Autocad gestiona una base de datos de formas geométricas que se muestran en una pantalla grafica mediante el editor de dibujos. La interacción del usuario se realiza a través de comandos, de edición o dibujo, desde la línea de comandos, a la que el programa está fundamentalmente orientado.
Parte del programa AutoCAD está orientado a la producción de planos, empleando para ello los recursos tradicionales de grafismo en el dibujo, como color, grosor de líneas y texturas tramadas. AutoCad, utiliza el concepto de espacio modelo y espacio papel para separar las fases de diseño y dibujo en 2D y 3D, de las específicas para
Fig 3.2 Ambiente gráfico de 2 dimensiones de Autocad
Es por esta razón que para este trabajo se utiliza Autocad, ya que permite trabajar a escala con el equipo utilizado en el proceso, para de esta forma entregar al cliente los planos del diseño de los gabinetes de control y sepa en donde y como identificar el equipo utilizado en el proceso de control.
Fig.3.3 Ambiente grafico de Autocad en 3 dimensiones.
Fig.3.5 Ambiente gráfico de Autocad Electrical
3.2 Normas NEMA
Dado que en este trabajo se pretende realizar el diseño de un gabinete de control, es necesario hacer mención de las normas Nema.
La National Electrical Manufacturers Association (Asociación Nacional de Fabricantes Eléctricos es por sus siglas en ingles), una asociación industrial norteamericana
creada el 1 de septiembre de 1926 tras la fusión de la Associated Manufacturers of Electrical Supplies (Fabricantes de Suministros Eléctricos Asociados) y la Electric Power Club (Club de Potencia Eléctrica). Su sede principal está en Rosslyn, en
el responsable de numerosos estándares industriales comunes usados en el campo de la electricidad. Entre otros, la NEMA ha establecido una amplia gama de estándares para encapsulados de equipamientos eléctricos, publicados como NEMA Standards Publication 250.
3.2.1 Protecciones NEMA
Dependiendo de la aplicación industrial a la que va dirigido el gabinete, la NEMA define diferentes estándares, diseñados para cubrir el nivel de protección necesario atendiendo a diferentes condiciones ambientales. Un encapsulamiento NEMA típico puede responder a diferentes agentes ambientales tales como agua, polvo, aceites, refrigerantes, o atmósferas que contengan agentes agresivos como acetileno o gasolina. En la página de Internet www.nema.org puede consultarte una lista completa de dichos estándares.
En este caso, se hará mención de la norma NEMA utilizada en el momento de colocar el gabinete a usar para el diseño del mismo, esto es debido a que existen diferentes componentes eléctricos en uso, y que cada uno cumple con ciertos estándares establecidos por la NEMA, nos concentramos en verificar el Estándar que dará la protección final a todo el equipo concentrado dentro del gabinete.
3.3 Planteamiento del Problema
Los elementos que se encuentran dentro del gabinete se encargaran de realizar el control de una turbina-generador y del gobernador de una planta generadora de energía que está dividida en Turbina-Generador y Gobernador.
El gobernador de encargará del control de velocidad de la turbina-generador
Como este es un problema que está planteando por CFE para una de sus plantas, ellos están dando la cantidad y el tipo de señales a controlar, por lo que yo lo que mi trabajo es proponer el equipo y el diseño del gabinete de control, dejando a un lado el diseño lógico y la programación de los equipos, así como los gráficos que servirán de interfaces entre hombre-máquina, debido a que esos son temas que bien merecen ser tratados aparte debido a su complejidad.
El problema planteado por CFE es construir 3 gabinetes de control que contengan los elementos necesarios para controlar 120 señales digitales de entrada con protección de corriente limitativa, 40 señales de salida digitales, estas señales van conectadas a un relevador normalmente abierto cada una, 42 señales analógicas de entrada que van una resistencia variable o shunt, y 20 señales analógicas de salida.
En el Anexo 1 en la Tabla 1, se muestran los requerimientos de alimentación y estándares de las señales.
Una vez propuesta la cantidad de señales a controlar elegimos el equipo que será colocado en los gabinetes de control. Para ello tomando en cuenta costo funcionamiento y conocimiento del equipo propongo lo siguiente:
CONTROLADOR AC800M:
Fig. 3.6 Sistema de Control AC800M
El controlador AC 800M está formado por:
• Unidad de procesador
• Interfaces de comunicación para diferentes protocolos
• Fuentes de energía con distintos niveles de voltaje
• Unidad de batería de respaldo
Algunos beneficios de este procesador son:
• Flexible, el AC 800M puede ser montado según las necesidades del cliente.
• Puede trabajar de forma redundante para mayor confiabilidad.
• Cuenta con puertos de comunicación de Ethernet redundantes.
• Puertos de comunicación RS-232.
• Bajo consumo de energía
• Conexión flexible, usando entradas y salidas locales o buses de campo estándar (fieldbus).
• Hardware basado en estándares para óptima comunicación (Ethernet, Profibus DP).
• Soporte para Profibus DP fieldbus.
• Soporte para Foundation Fieldbus.
• Soporte para Dispositivos de campo e instrumentos basados en el protocolo HART.
• Soporte de conexión vía Gateway (Ethernet).
DI820 DIGITAL INPUT MODULE, 120V a.c./d.c.
El DI820 es un módulo digital de entrada de 8 canales del sistema S800 de productos de ABB para sistemas de potencia.
Todos los canales de entrada consisten de elementos de corriente limitativa, componentes de protección EMC, Led indicador de estado de señal de entrada, barrera óptica de aislamiento.
Los tres estados indicadores del led son: Fault (Rojo), Run (Verde) y Warning (amarillo) los estados del led y el estatus de los canales de entrada son tomados en cuenta para la configuración del equipo.
• Canales individuales aislados
• Supervisión de voltaje de energía de campo de entrada
• Filtrado de señal
• Protección EMC
• Rail para montaje
• 8 Canales de entrada para 120 V a.c/d.c
Se propone la utilización de 16 módulos DI820.
D0820: DIGITAL OUTPUT MODULE, Relay normalmente abierto.
El DO820 pertenece a la serie S800 de ABB y es un modulo de salidas digitales de relevador normalmente abierto. El máximo voltaje de salida es de 250 Va.c./d.c. y una corriente continua de salida máxima de 3 A. Todas las salidas están aisladas.
• 8 canales de salida para 230 V a.c/d.c Relevador normalmente abierto (NO)
• 8 canales aislados
• Indicadores de status de salida.
• Detector de error de salida
• Protección EMC
• Rail de montaje.
Se proponen utilizar 6 módulos DO820.
AI820: ANALOG INPUT MODULE, 0.4@20mA, 0.2@10V o 2 @10 V d.c.
El AI820 es un modulo de entradas análogas de 8 canales. Cada canal puede ser una entrada de voltaje o una entrada de corriente.
• 8 Canales de entrada unipolar para 0.4@20mA, 0.2@10V o 2 @10 V d.c.
• 1 grupo de 8 canales aislados de tierra.
• 12 bits de resolución
• Protección de entrada por una resistencia de desviación (shunt),
• Protección EMC
• Rail de montaje.
Se proponen 6 módulos AI810 para este proyecto.
AO820: Analog Output Module 0.4@20 mA.
El AO820 es un módulo de salidas analógicas encargado de supervisar la comunicación de los convertidores digitales–analógicos (D/A) a través de la verificación de lectura de los datos de retroalimentación. Los led´s son usados para el diagnostico sobre el funcionamiento del dispositivo.
• 8 Canales de salida de 0@20 mA, 4@20mA.
• Detector de error a la salida
• Protección EMC
• Rail de montaje.
Se proponen 3 módulos AO820 para este proyecto.
Fig. 3.7 Módulos Esclavos del Sistema AC 800M
Es importante mencionar que la interfase de comunicación denominada cluster, puede dar soporte hasta 12 módulos esclavos de forma tal que nuestro arreglo de gabinetes permitirá que si en un futuro son requeridos más módulos esclavos dentro del sistema, estos puedan ser añadidos dentro de nuestro arreglo de gabinetes.
PHOENIX CONTAC SOURCE: La fuente de alimentación Phoenix Contac QUIT es seleccionada tomando en cuenta los voltajes de alimentación de los procesadores y de los módulos esclavos utilizados en los gabinetes. En este caso es una fuente de 24VDC @ 20Amp. Con una tensión nominal de entrada de 100...240 V
[image:54.595.180.431.285.539.2]En la figura 3.8 podemos observar una imagen de este tipo de fuentes.
Fig. 3.9 Fuente de alimentación Phoenix Contact de 24 V @ 20Amp
3.4 Diseño de los Gabinetes
En el plano 1 se muestra los 3 Gabinetes de control que se van a utilizar, se están representando a escala desde la parte exterior. Aquí se ponen los 3 gabinetes de Rittal con medidas de 600x800x2200 mm con protección NEMA 12. Cabe mencionar que algunos de los dispositivos utilizados vienen en kit, que contienen bases u otros elementos necesarios para su funcionamiento.
van agregando para el correcto funcionamiento del gabinete, como son, la unidad de aire acondicionado y el puerto de programación de los módulos.
Los gabinetes aquí utilizados contienen bases para los montajes de los rieles en los que se colocarán los módulos esclavos y controladores.
3.4.1 Gabinete 1. Controlador del Proceso
Este gabinete será el encargado de albergar a los controladores del proceso. El diseño se muestra en el plano 3.
Lo que se propone para este gabinete es colocar un par de controladores, que funcionen de forma redundante, esto es que solo un controlador se encargue del proceso y que el otro trabaje a manera de respaldo, guardando un respaldo de toda la información que se maneje, así si en algún momento, el controlador principal falla, el que se encuentra en modo de respaldo, podrá retomar el control del proceso sin que haya una pérdida de la información. Para asegurarse de que ninguno de los 2 controladores falle, estos realizan pruebas periódicas el uno al otro, comprobando su funcionamiento
El gabinete controlador del proceso, por ser el gabinete que albergara a las fuentes de alimentación, contendrá los interruptores automáticos (breaker) los procesadores y lo módulos de comunicación, contará también con una unidad de aire acondicionado, lo que permitirá evitar un sobre calentamiento y que por tanto dará mayor protección a los dispositivos que albergue. Ver plano 3 para conocer el diseño y la lista de elementos que contiene el gabinete.
3.4.2 Gabinete 2. Turbo Generador
Este gabinete contendrá los módulos encargados de albergar los módulos esclavos encargados del control de la turbina-generador, para ello se nos ha proporcionado la información de que para el control de la turbina –generador, se han cuantificado las siguientes señales:
• 60 señale digitales de entrada => 9 DI820
• 18 señales digitales de salida => 3 DO820
• 18 señales análogas de entrada => 3 AI820
• 5 señales análogas de salida => 1 AO820
Estos módulos serán colocados en 2 rieles diferentes como se muestra en el plano 6. El riel A1 contendrá a los módulos de señales análogas y el riel A2 contendrá las señales digitales, estos módulos son colocados después del cluster o módulo de comunicación en el orden de señales de entrada, seguidos de la señales de salida,
En el plano 7, 8 se muestra a los rieles A1 y A2 respectivamente de forma que se puedan ver los elementos que lo conforman, en los planos 9, 10 y 11 se muestran las tablillas de alimentación correspondientes a los módulos esclavos, estas, serán de gran importancia, en el momento de realizar el cableado del gabinete.
3.4.3 Gabinete 3. Gobernador
Este gabinete será el encargado de albergar a los dispositivos encargados de realizar el control del gobernador de la turbina-generador, por lo que las señales de entrada y salida serán manejadas por los siguientes módulos.
• 48 señale digitales de entrada => 7 DI820
• 18 señales digitales de salida => 3 DO820
• 18 señales análogas de entrada => 3 AI820