ÍNDICE
Número Tema Página
Objetivo general. I
Objetivos Específicos. I
Justificación. II
1 CAPÍTULO I: Introducción y evolución de los sistemas de comunicación móviles
1.1 Introducción. 1
1.2 Primera generación. 3
1.3 Segunda generación. 5
1.4 Generación 2.5. 7
1.5 Tercera generación. 8
1.6 Cuarta generación. 10
2 CAPÍTULO II: Radio definido por software
2.1 Introducción. 12
2.2 Radio definido por software. 12
2.2.1 Arquitectura de Transmisiones de Radio Tradicional. 13
2.2.2 Arquitectura Ideal de Transmisores de Radio Basados en Software. 14
2.2.3 Principio de Funcionamiento de un Receptor RDS. 16
2.2.4 Conversión de Frecuencia. 17
2.3 Modulación. 17
2.3.1 Tipos de Modulación Analógica y Digital. 18
2.3.2 Demodulación. 20
2.4 Transmisión por Desplazamiento de Fase Binaria (BPSK). 20
2.4.1 Transmisor BPSK. 20
2.4.2 Receptor BPSK. 22
2.5 Codificación. 23
2.5.1 Códigos de Paridad. 23
2.5.2 Códigos m entre n. 23
2.6 Códigos de Bloque Lineales Sistemáticos. 24
2.7 Código de Hamming. 27
2.8 Decodificación Hamming. 29
2.9 Códigos Convolucionales. 30
3 CAPÍTULO III: Dispositivos de lógica programable
3.1 Introducción. 31
3.2 PLDs (Programmable Logic Devices). 32
3.3 ASPLDs (Application Specific Programmable Logic Devices). 33
3.4 PAL (Programmable Array Logic). 33
Número Tema Página
3.5.1 Estructura General de la FPGA. 35
3.5.2 Lenguajes para programar en fpgas. 37
4 CAPÍTULO IV: Simulación e implementación en fpga
4.1 Introducción. 41
4.2 Modulador BPSK. 41
4.3 Demodulador BPSK. 44
4.4 Codificador Hamming 7,4. 45
4.5 Decodificador Hamming 7,4. 47
4.6 Generar Proyecto ISE para grabar la tarjeta FPGA. 54
4.7 Grabación de la tarjeta FPGA. 56
Conclusiones 64
Recomendaciones para trabajos futuros 64
Glosario 65
Apéndice A 67
Apéndice B 68
Número Tema Página
ÍNDICE DE TABLAS
CAPÍTULO I
1.1 Rangos de frecuencias a las que se trabajaban para eliminar interferencias que llegaran a surgir. 2
1.2 Características de la primera generación. 5
1.3 Características de la segunda generación. 7
1.4 Los principales estándares de comunicación móvil y su evolución de cada uno. 10
CAPÍTULO IV
4.1 Tabla para determinar las salidas trt dependiendo el número de error 50
ÍNDICE DE FIGURAS
CAPÍTULO I
1.1
Figura 1.1 Áreas en formas hexagonales, con su estación móvil y los usuarios que se encuentra adentro de cada una
de ellas. 3
CAPÍTULO II
2.1 Arquitectura Tradicional de Transmisores de Radio. 13
2.2 Arquitectura ideal de Transmisores de Radio Basados en Software. 15
2.3 Combinación de dos señales (fa y fo) mediante un mezclador. 17
2.4 Ejemplo de Modulación. 18
2.5 Gráficas de la modulación en amplitud y en frecuencia. 19
2.6 Demodulación. 20
2.7 Diagrama de un Transmisor BPSK. 21
2.8 Diagrama Fasorial y de Constelación del Modulador BPSK. 21
2.9 Fase de salida contra la relación de tiempo para una forma de onda BPSK. 22
2.10 Diagrama de un Receptor BPSK. 23
CAPÍTULO III
3.1 Estructura interna de un PLD. 32
3.2 Estructura interna de un PAL. 34
3.3 Estructura interna de una FPGA. 36
3.4 Estructura del LUT de un bloque lógico. 37
3.5 Programación de una tarjeta FPGA a pasos. 38
3.6 Tarjeta FPGA Xilinx Spartan-3 200000-puerta. 39
CAPÍTULO IV
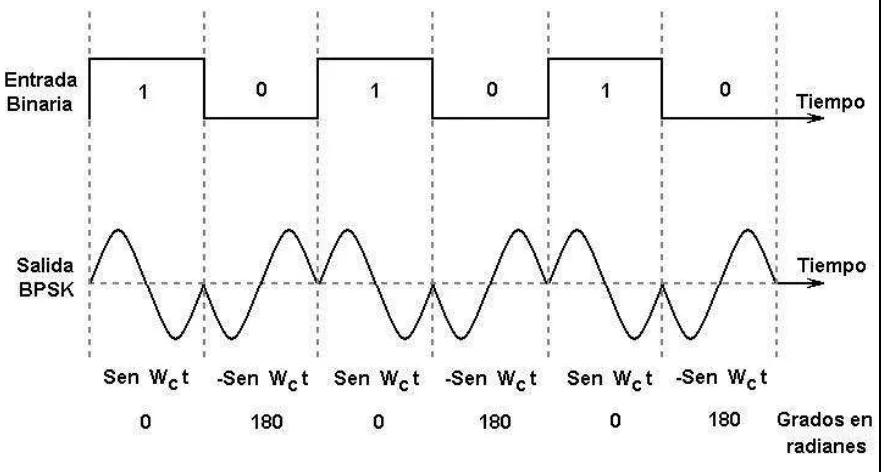
4.1 Fase de salida contra la relación de tiempo para una forma de onda BPSK. 41
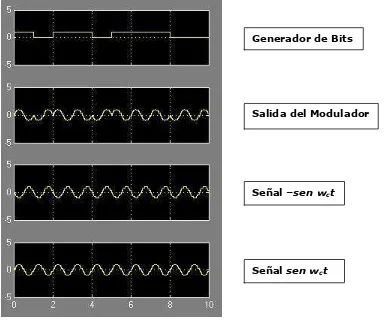
4.2 Diagrama del modulador BPSK. 42
4.3 Subsistema generador de bits. 42
Número Tema Página
4.5 Diagrama del demodulador BPSK. 44
4.6 Resultados obtenidos del demodulador BPSK. 44
4.7 Diagrama del codificador implementado con compuertas AND y XOR. 46
4.8 Bloque de entrada y salida del codificador. 46
4.9 Subsistema generador de bits. 47
4.10 Resultado obtenido de la simulación del codificador. 47
4.11 Esquema del decodificador hamming. 48
4.12 Subsistema Hamming Decoder. 48
4.13 Diagrama del subsistema syndrome implementado con compuertas AND y XOR. 49
4.14 Entradas y salidas del subsistema syndrome para obtener el número de errores. 50
4.15 Diagrama del subsistema Err loc implementado con compuertas AND y NOT. 51
4.16 Entradas y salidas del subsistema Err loc. 52
4.17
Diagrama de la decodificación, el mensaje original sale por Out2 y los bits de paridad que se le quitan al mensaje por
Out1. 52
4.18 Mensaje codificado. 53
4.19 Resultado obtenido de la simulación del decodificador el mensaje original se muestra por el display2. 53
4.20 Ventana del bloque System Generator para crear proyecto ISE. 54
4.21 Ventana del bloque System Generator generando proyecto ISE. 55
4.22 Archivos generados por System Genrator. 55
4.23 Tarjeta FPGA Spartan 3 Starter Kit. 56
4.24 Conexión del cable JTAG. 56
4.25 Entorno Xilinx ISE. 57
4.26 Ventana del código VHD generado por system generator. 58
4.27 Ventana Xilinx PACE. 59
4.28 Ventana Process Properties – Startup Options. 60
4.29 Ventana iMPACT. 60
4.30 Abriendo el archivo .bit que se va a grabar en el FPGA. 61
4.31 Después de cargar el archivo .bit se abre otra ventana para seleccionar otro archivo. 62
4.32 Ventana Device Programming Properties. 62
[image:22.612.96.507.76.314.2]
15
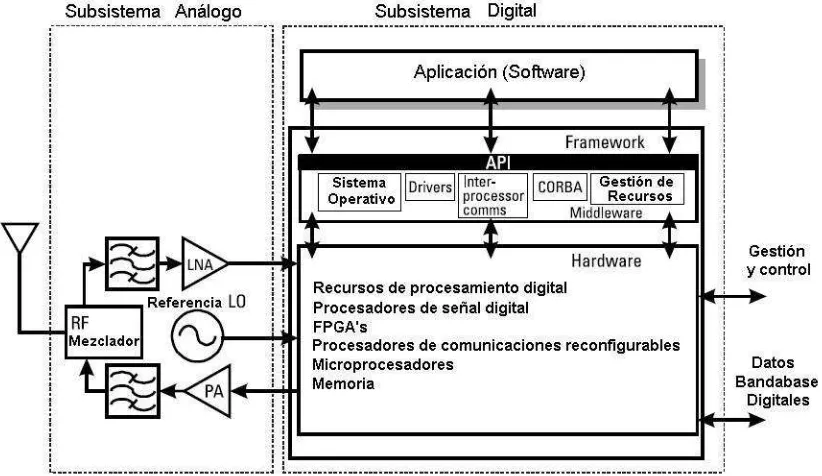
Figura 2.2. Arquitectura ideal de Transmisores de Radio Basados en Software.
La arquitectura empuja la etapa de conversión analógica hacia la
derecha lo más cerca posible de la antena, en este caso se prioriza al
amplificador de potencia (PA) en el transmisor y después al amplificador
de bajo ruido (LNA) en el receptor. La separación de portadoras y la
conversión de frecuencias altas y bajas a banda base es mejorada por
los medios de procesamiento digital. De igual manera la codificación del
canal y las funciones de modulación son mejoradas digitalmente en
banda base por los mismos medios de procesamiento. El software para
una arquitectura ideal es en capas entonces el hardware es
completamente abstracto de la aplicación de software. Una capa
intermedia logra esa funcionalidad cubriendo los elementos del
hardware como objetos y proveyendo servicios que permiten a los
objetos comunicarse unos con otros mediante interfases estándar, por
ejemplo Common Object Request Broker Architecture (CORBA). La capa
intermedia incluye: sistema operativo, controladores del hardware,
recursos de administración y otras aplicaciones no específicas de
software. La combinación del hardware y la capa intermedia
frecuentemente se llama framework.
[image:25.612.118.508.95.319.2]
18
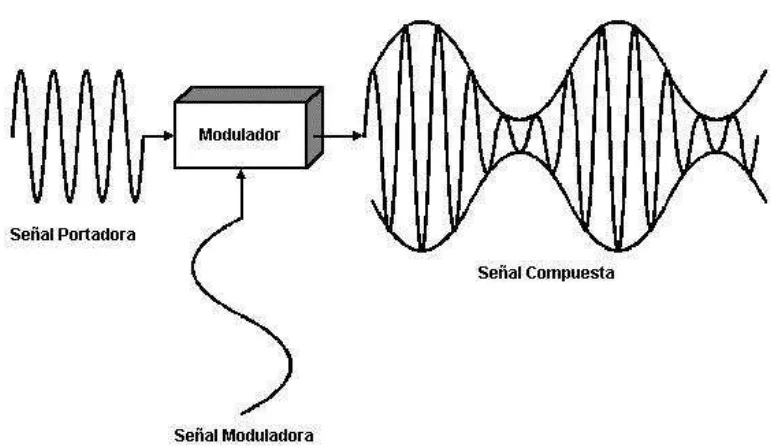
Figura 2.4. Ejemplo de Modulación.
Existen varios motivos por los que se modula una señal:
Para facilitar la propagación de la señal de información ya sea por
medios alámbricos o inalámbricos.
Ordena el radioespectro, distribuyendo canales a cada tipo de
información.
Disminuye dimensiones de antenas.
Optimiza el ancho de banda de cada canal.
Evita interferencias entre canales.
Protege la información contra degradaciones por ruido.
Define la calidad de la información transmitida [11].
2.3.1 TIPOS DE MODULACIÓN ANALÓGICA Y DIGITAL
Existen 2 tipos de modulación básicas; la analógica que se realiza a
partir de señales de información como: la voz, audio y video en su
forma eléctrica y la modulación digital que se realiza a partir de señales
generadas por fuentes digitales como una PC.
19
Tipos de modulación digital: Modulación en Amplitud, Apagado
Encendido (ASK), Modulación por Desviación de Frecuencia (FSK),
Modulación por Desviación de Fase (PSK), Modulación de Amplitud en
Cuadratura (QAM) [11].
[image:26.612.180.471.200.605.2]
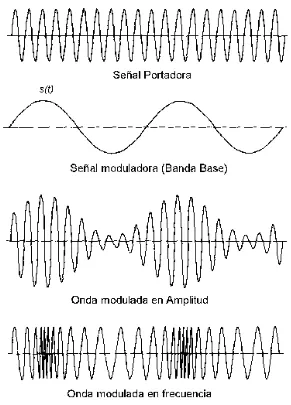
En la figura 2.5 se observa las gráficas de la modulación en amplitud y
en frecuencia.
[image:28.612.87.530.359.582.2]
21
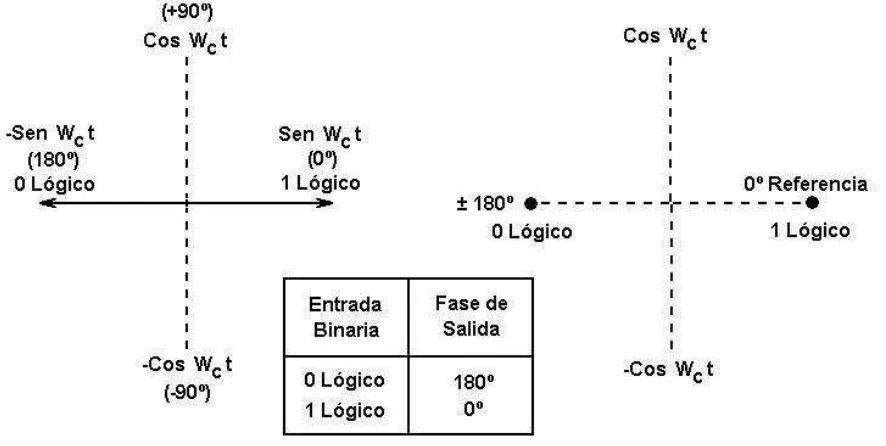
Figura 2.7. Diagrama de un Transmisor BPSK.
En la figura 2.8 se muestra el diagrama fasorial y el diagrama de
constelación o diagrama de espacio de estado de señal del modulador
BPSK.
Figura 2.8. Diagrama Fasorial y de Constelación del Modulador BPSK.
32
-
FPIC (Field Programmable Integrated Circuits)
Son chips que se programan por el usuario mediante programadores
comerciales, el término FPIC también incluye a los CI no destinados a
las aplicaciones lógicas, tienen aplicaciones de bajo costo y se clasifican
en PLD (Programmable Logic Device), las FPGA (Field Programmable
Gate Array) y los ASPLD (Aplication Specific Programmable Logic
Devices).
3.2 PLD
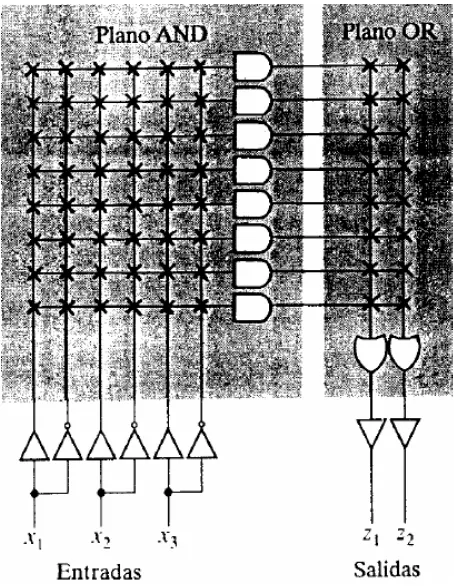
[image:39.612.193.420.346.639.2]
Los PLDs (Programmable Logic Devices) son pequeñas ASICs
configurables por el usuario capaces de realizar una determinada
función lógica. La mayoría de los PLD consisten en una matriz de
puertas AND seguida de otra matriz de puertas OR como se muestra en
la figura 3.1. Mediante esta estructura, puede realizarse cualquier
función como suma de términos productos.
Figura 3.1. Estructura interna de un PLD.
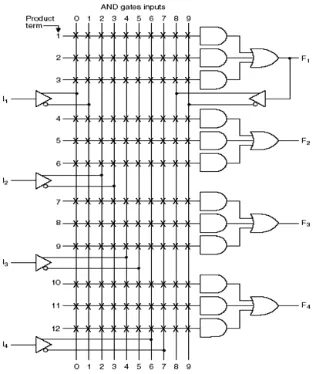
[image:41.612.148.461.68.442.2]
34
Figura 3.2. Estructura interna de una PAL.
3.5 FPGA
La FPGA (Field Programmable Gate Array) es un dispositivo que surgió a
mediados de los ochentas, fue una de las nuevas arquitecturas de los
circuitos integrados, ha sido consideraba como un circuito de lógica
programable.
Este dispositivo ayuda a los diseñadores de sistemas, a revolucionar la
implementación de sistemas digitales configurables ya que permite
manejar y modificar miles de compuertas lógicas que la componen de
esta forma ayuda a evolucionar y mejorar el funcionamiento de otros
sistemas electrónicos de control y de comunicaciones. En este capítulo
hablaremos sobre estas tarjetas.
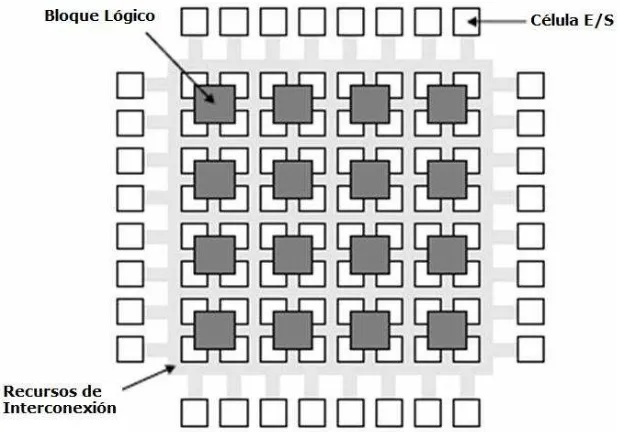
[image:43.612.152.462.70.286.2]
36
Figura 3.3. Estructura interna de una FPGA general
En la figura 3.3 se muestran los elementos básicos que contiene una
FPGA que son los siguientes:
-
Las células de entrada y salida.
-
Recursos de interconexión, cuya estructura y contenido se
denomina arquitectura de rutado.
-
Los bloques lógicos, los componentes que disponen cada uno
pueden variar de acuerdo al fabricante.
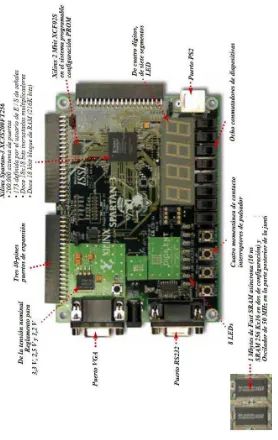
39
Utilizamos las FPGA ya que es una clase especial de chip para
implementar en hardware un código de aplicación, es como tener una
placa para implementar circuitería personalizada por medio de
hardware.
Para este proyecto estamos trabajando con la tarjeta Xilinx Spartan-3
200000-puerta Plataforma FPGA - XC3S200 como se muestra en la
figura 3.6.
[image:46.612.171.449.214.654.2]
41
CAPÍTULO IV: Simulación e implementación en FPGA,
pruebas y resultados.
4.1 INTRODUCCIÓN
En este capítulo se presenta el proceso de diseño, simulación e
implementación del Modulador, Demodulador BPSK, Codificador y
Decodificador Hamming 7,4. El entorno de desarrollo utilizado para
realizar la simulación es Simulink de Mathworks, además de
herramientas de Xilinx como System Generator para realizar los
diagramas a bloques, y Xilinx ISE para grabar la tarjeta FPGA Spartan-3
Starter Kit Board.
4.2 MODULADOR BPSK.
Como ya se ha mencionado en el capítulo 2, la modulación BPSK es una
modulación digital, por lo tanto trabaja con una señal de entrada digital
binaria y tiene 2 fases de salida dependiendo el estado de la señal de
entrada, cuando se tiene un estado alto “1” la portadora se transfiere a
la salida en fase y si es un estado bajo “0” se transfiere desfasada 180º.
[image:48.612.87.529.403.639.2]
En la figura 4.1 se muestra como se realiza la modulación.