ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓNDISEÑO DE LA SUSPENSIÓN Y DIRECCIÓN
DE UN CARRO TODO TERRENO
TIPO SAE MINI BAJA
TESIS
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS EN INGENIERÍA MECÁNICA
P R E S E N T A :
ING. AARÓN ALEJANDRO AGUILAR ESPINOSA
DIRECTOR: DR. LUIS HECTOR HERNÁNDEZ GÓMEZ
Dedicatoria.
A mis padres :
Teresa Espinosa
y
Enrique Aguilar
Por su amor .... por su apoyo incondicional
en todos los proyectos e ideas
que he emprendido.
Gracias.
A:
Gabriela Sotomayor
Índice
Pág.
Índice I
Índice de Figuras V
Índice de Tablas VIII
Simbología IX Resumen XI
Abstract XI
Introducción XII
Justificación XIV
Alcance XV
Objetivos XV
Capítulo 1 Generalidades Sobre Suspensiones y Direcciones en Vehículos todo
Terreno.
1.1 La Historia del Automóvil en el Mundo 2
1.2 Evolución Histórica de los Sistemas de Suspensión y Dirección. 5
1.3 Importancia de las Masas Suspendidas 8
1.4 Cualidades y Características de Manejo de un Automóvil. 9
1.5 Importancia de las Suspensiones, respecto a la Salud Humana. 11
1.6 Vehículos Todo Terreno 12
1.6.1 Tipos de Vehículos Todo Terreno 13
1.7 Vehículos SAE Mini Baja. 15
1.8 Definición del Problema. 16
1.9 Referencias. 17
Capítulo 2 Aspectos Teóricos Sobre Suspensiones y Direcciones.
2.1 Aspectos teóricos sobre direcciones. 19
2.2 Geometría de la Dirección. 20
2.3 Cinemática de la Dirección. 22
2.3.1 Sistema Ackerman 23
2.3.2 Relación entre los Elementos del Trapecio de Jeantaud 25
2.3.2.2 Representación grafica entre los Ángulos de Viraje. 26 2.3.2.3 Relación entre los Elementos del Trapecio de Jeantaud 28
2.3.2.4 Representación grafica del valor de R. 30
2.4 Geometría de las Ruedas 30
2.4.1 Inclinación del Eje de Dirección y Radio de Pivotaje. 30
2.4.2 Convergencia. 32
2.4.3 Avance 33
2.4.4 Angulo de Caída y Huella de Contacto. 35
2.5 Resistencia a la Rodadura 35
2.6 Características de las Llantas. 37
2.6.1 Tracción 37
2.6.2 Tracción en la Llanta vs. Carga. 37
2.6.3 Factores de Llanta. 39
2.7 Prueba de Maniobrabilidad. 40
2.8 Tipos de Direcciones. 41
2.8.1 Dirección mediante Tornillo y Sector Dentado, Tornillo Sinfín y Rueda
Dentada 41
2.8.2 Dirección mediante Tornillo y Tuerca. 42
2.8.3 Dirección mediante Tornillo y Tuerca por Cremallera 42
2.8.5 Dirección mediante Tornillo y Rodillo 43
2.8.6 Dirección mediante Piñón y Cremallera. 43
2.9 Desmultiplicación de la Dirección. 44
2. 10 Aspectos Teóricos sobre Suspensiones 45
2.10.1 Fuerzas g. 45
2.10.2 Distribución del Peso
45
2.11 Sistemas de Suspensión. 46
2.12 Configuración de la Suspensión 46
2.13 Sistema de Coordenadas 47
2.14 Tipos de Suspensiones. 48
2.14.1 Suspensiones Delanteras. 49
2.14.2 Suspensiones Traseras. 55
2.15 Sistemas de Rigidez y Amortiguamiento. 58
2.15.1 Cálculo de la Rigidez de un Resorte Helicoidal. 59
2.15.2 Amortiguamiento de una Suspensión, Tipos de Amortiguamiento 60
2.15.3 Montaje de los Amortiguadores 61
2.15.4 Amortiguadores 62
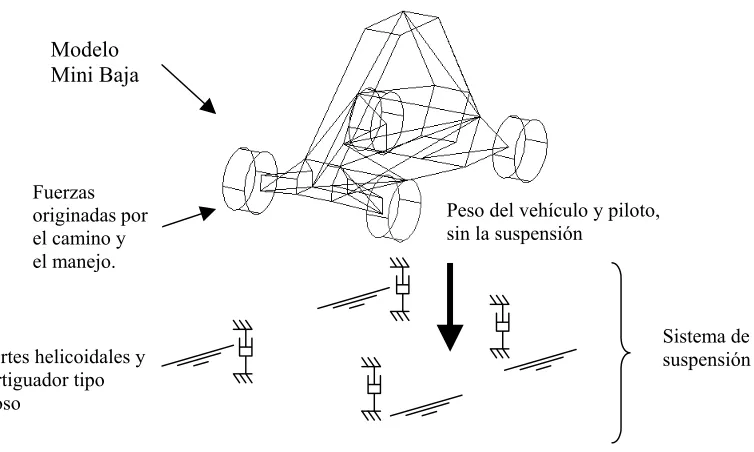
2.16 Concepto Empleado 64
2.17 Sumario 66
2.18 Referencias 66
Capítulo 3 Metodología de Análisis y Aplicación al Caso de Estudio.
3.2 Metodología de Diseño 70
3.2.1 La Metodología del Diseño Mecánico. 71
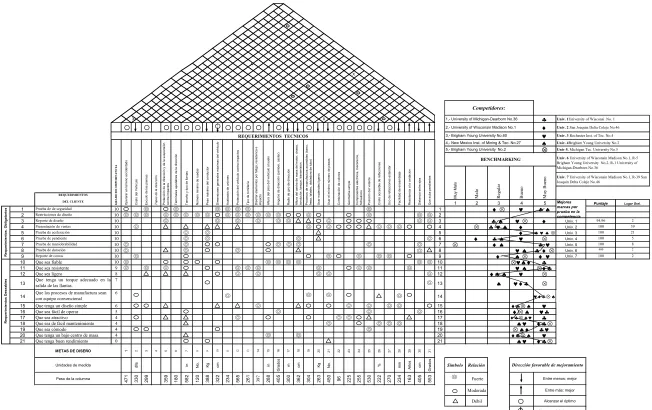
3.2.2 Despliegue de las Funciones de Calidad. 72
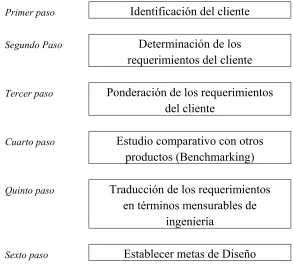
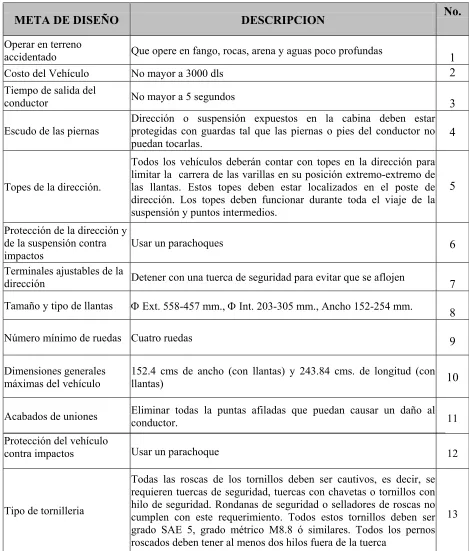
3.2.3 Establecimiento de Metas de Diseño 83
3.3 Diseño Conceptual. 88
3.3.1 Generación de conceptos. 88
3.3.2 Evaluación de Conceptos. 90
3.3.3 Conceptos del Sistema de Dirección. 92
3.3.4 Conceptos del Sistema de Suspensión Delantera. 94
3.3.5 Conceptos del Sistema de Suspensión Trasera. 95
3.4 Concepto de Diseño Adoptado. 97
3.5 Diseño de Detalle 101
3.5.1 Cálculo de la dirección 101
3.5.2 Trazo de la Suspensión. 107
3.5.3 Suspensión Delantera. 110
3.5.4 Caída, Avance, Inclinación del Eje de Dirección, Inclinación del Perno Rey, Radio de Pivotaje y Convergencia.
110
3.5.5 Cinemática de la Rueda Delantera. 111
3.5.6 Centro de giro de la llanta 114
3.5.7 Cojinetes de los Puntos de Pivote de los Brazos de Suspensión 115
3.5.8 Suspensión Trasera. 116
3.5.9 Cinemática de la rueda trasera 116
3.5.10 Cálculo de Rigidez y Amortiguamiento de la Suspensión 119
3.6 Sumario. 125
3.7 Referencias. 125
Capítulo 4 Evaluación de Resultados.
4.1 El Modelo Sinérgico 127
4.2 Resultados Obtenidos en la Suspensión y Dirección 129
4.2.1 Modificaciones Realizadas 132
4.3 Simulación Dinámica de la Suspensión y Dirección 136
4.3.1 Generalidades para el Análisis Dinámico en ADAMS 136
4.4 Descripción de las Pruebas 139
4.4.1 Características estáticas del carro con la suspensión integrada 139 4.4.2 Características dinámicas del carro con la suspensión integrada 144
4.5 Frecuencia de oscilación de la masa no suspendida. 146
4.6 Sumario 148
Conclusiones
Trabajos a Futuro
Anexo 1 Cálculo de Cojinetes de Pivotes entre Chasis y Brazos de Suspensión. Anexo 2 Cálculo de Piñón y Cremallera.
Anexo 3 Dibujos de Detalle de Suspensión Trasera. Anexo 4 Dibujos de Detalle de Suspensión Delantera Anexo 5 Ensamble de Suspensión y dirección
Anexo 6 Selección y Montaje de Rodamientos
Anexo 7 Características Finales de la Suspensión y Dirección.
Índice de Figuras
Pág.
Fig. 1.1 Vehículo con tres ruedas, impulsado con vapor, con el propósito de transportar piezas de artillería
2
Fig. 1.2 Ford T, fabricado en E U. a principios del siglo XX 3 Fig. 1.3 Ejemplo de los llamados SUV (Sport Utility Vehicle) 3 Fig. 1.4 Automóvil dotado de motor, fabricado en 1886 por Gottlieb Daimler 6
Fig. 1.5 Coche Holandés; Spyker de 4 cilindros, 1904 7
Fig. 1.6 Carro de carreras tipo todo terreno, categoría Baja Mil. 14 Fig. 1.7 Ejemplo de los primeros vehículos todo terreno de uso militar. 14
Fig. 2.1 Geometría de las ruedas delanteras. 21
Fig. 2.2 Trayectoria de ruedas delanteras durante un viraje de 360° 21 Fig. 2.3 Sistema de dirección; a) rueda única, b)eje rígido, c) Eje partido. 22
Fig. 2.4 Sistema de dirección basado en geometría Ackerman 23
Fig. 2.5 Sistema de dirección de ejes directrices 25
Fig. 2.6 Representación gráfica entre ángulos de viraje. 27
Fig. 2.7 Relación entre los elementos del trapecio de Jeantaud. 28
Fig. 2.8 Eje de pivotamiento de rueda delantera. 31
Fig. 2.9 Inclinación del eje de pivotamiento. 32
Fig. 2.10 Angulo de avance positivo de la llanta. 33
Fig. 2.11 Efecto direccional del caster en la dirección del vehículo. 34 Fig. 2.12 Efecto del camber en el área del parche de contacto. 35 Fig. 2.13 Esquema de la resistencia a la rodadura de una rueda delantera 36 Fig. 2.14 Relación entre carga vertical y tracción para cualquier llanta 38 Fig. 2.15 cajas de dirección de a)tornillo y sector dentado y b) tornillo sin fin y
rueda dentada.
41
Fig. 2.16 Sistema de dirección por tornillo y tuerca 42
Fig. 2.17 Sistema de dirección por tornillo y tuerca por cremallera 42
Fig. 2.18 Sistema de dirección por tornillo y rodillo 43
Fig. 2.19 Sistema de dirección de piñón y cremallera. 43
Fig. 2.20 Elementos básicos de la suspensión. 47
Fig. 2.21 Vehículo sujeto a diferentes componentes de movimiento 41
Fig. 2.22 Suspensión delantera de eje rígido. 49
Fig. 2.23 Suspensión delantera independiente tipo eje de giro. 50 Fig. 2.24 Suspensión delantera independiente tipo barras de arrastre. 51 Fig. 2.25 Suspensión delantera independiente tipo MacPherson. 52 Fig. 2.26 Suspensión independiente de brazos dobles tipo “A” de igual longitud. 53 Fig. 2.27 Suspensión independiente de brazos dobles tipo “A” de diferente
longitud.
Fig. 2.28 Centro de giro de una suspensión delantera de brazos dobles tipo “A” 55
Fig. 2.29 Suspensión trasera de eje vivo 56
Fig. 2.30 Suspensión trasera a) independiente y b) de eje vivo. 57 Fig. 2.31 Tipos de amortiguamiento presentes en una suspensión. 60 Fig. 2.32 Factor de carga vertical para diferentes ángulos de montaje en
amortiguadores.
61
Fig. 2.33 Ciclo de histéresis en materiales elásticos. 63
Fig. 2.34. Partes de un amortiguador a) cilindro doble, b) mono-tubo. 64
Fig. 2.35 Elementos que conforman el sistema. 65
Fig. 3.1 Etapas principales de la Metodología de Diseño. 71
Fig. 3.2 Metodología del Q 72
Fig. 3.3 Concepto de diseño para la suspensión delantera. 98
Fig. 3.4 Concepto de diseño para la suspensión trasera. 99
Fig. 3.5 Sistema de dirección de piñón y cremallera. 100
Fig. 3.6 Ángulos descritos por llantas delanteras en un viraje máximo a la izquierda
101
Fig. 3.7 Longitud del brazo de dirección y su ángulo con respecto a la línea de unión entre pivotes de dirección.
102
Fig. 3.8 Obtención gráfica de los valores de R y λ. 103
Fig. 3.9 Dirección en posición de línea recta. (vista superior). 104
Fig. 3.10 Dirección virando a la derecha (vista superior). 105
Fig. 3.11 Dirección virando a la izquierda (vista superior). 106 Fig. 3.12 Medidas generales del carro donde se colocará la suspensión y
dirección
108
Fig. 3.13 Medida del ancho máximo permitido por el reglamento SAE Mini Baja 2002
109
Fig. 3.14 Medida del largo máximo permitido por el reglamento SAE Mini Baja 2002
109
Fig. 3.15 Sistema propuesto de suspensión delantera. 110
Fig. 3.16 Representación del sistema de suspensión por un mecanismo de cuatro barras.
112
Fig. 3.17 Posición de la suspensión en reposo 112
Fig. 3.18 Posición en su punto más alto. (12.5 cms. de desplazamiento vertical) 113 Fig. 3.19 Posición en su punto más bajo. (12.5 cms. de desplazamiento vertical) 113 Fig. 3.20 Posición de la suspensión en su punto más bajo.
(5 cms. De desplazamiento vertical.)
114
Fig. 3.21 Localización del centro de giro de la rueda 115
Fig. 3.22 Sistema propuesto de suspensión trasera. 116
Fig. 3.23 Centro de giro de la suspensión trasera, a)dibujo en miniatura, b) dibujo ampliado.
117
Fig. 3.24 Posición de la suspensión trasera en reposo 118
Fig. 3.26 Suspensión trasera en su posición hacia arriba. 118
Fig. 3.27 Análisis de fuerzas en suspensión delantera. 120
Fig. 3.28 Análisis de fuerzas en suspensión trasera. 121
Fig. 4.1 Resumen de las actividades realizadas en el proyecto 128
Fig. 4.2 Brazo de dirección 130
Fig. 4.3 Zona de concentración de esfuerzos en el primer brazo de dirección 131 Fig. 4.4 Zona de concentración de esfuerzos en el segundo brazo de dirección 131 Fig. 4.5 Suspensión delantera. a) primer diseño, b) segundo diseño 132 Fig. 4.6 Comparación entre diseño preliminar y diseño final del poste de
dirección.
133
Fig. 4.7 Prueba de paso sobre rocas. 134
Fig. 4.8 Diferencia de altura entre suspensiones. a) primer diseño, b) segundo diseño.
134
Fig. 4.9 Suspensión trasera. a) primer diseño, b) segundo diseño 135 Fig. 4.10 Suspensión de dirección. a) unidad de piñón y cremallera, b) rótulas y
biela
135
Fig. 4.11 Ángulos de convergencia de las llantas cuándo la suspensión viaja a lo largo de toda su carrera.
137
Fig. 4.12 Ángulos de viraje de las llantas cuándo la suspensión viaja a lo largo de toda su carrera.
137
Fig. 4.13 Angulo de ataque del carro, a) modelado, b) en prueba de pendiente 139 Fig. 4.14 Angulo ventral del carro, a) modelado, b) pasando una pendiente 140 Fig. 4.15 Angulo de salida a)saliendo de la pendiente, b) bajando la pendiente. 140 Fig. 4.16 Altura del carro, a) modelado, b) prototipo construido. 141
Fig. 4.17 Distancia entre ejes, a) modelado, b) prototipo. 141
Fig. 4.18 Ancho entre centro de llantas del carro. 142
Fig. 4.19 Profundidad de vadeo. 143
Fig. 4.20 Angulo de volcadura, a) modelado, b) pasando prueba sobre rocas. 143 Fig. 4.21 Ángulos de volcadura, a) inseguro, b) en equilibrio, c)seguro 144 Fig. 4.22 Volcadura en recorrido de maniobrabilidad., a) primer impacto, b)
posición final
146
Índice de Tablas
Pág.
Tabla 1.1 Clasificación de autos todo terreno según su uso. 4
Tabla 2.1 Relación de la carga vertical con la eficiencia en curvas. 39 Tabla 2.2 Relación de peso y compresión de un típico resorte trasero 59
Tabla 3.1 Listado de requerimientos a ponderar 76
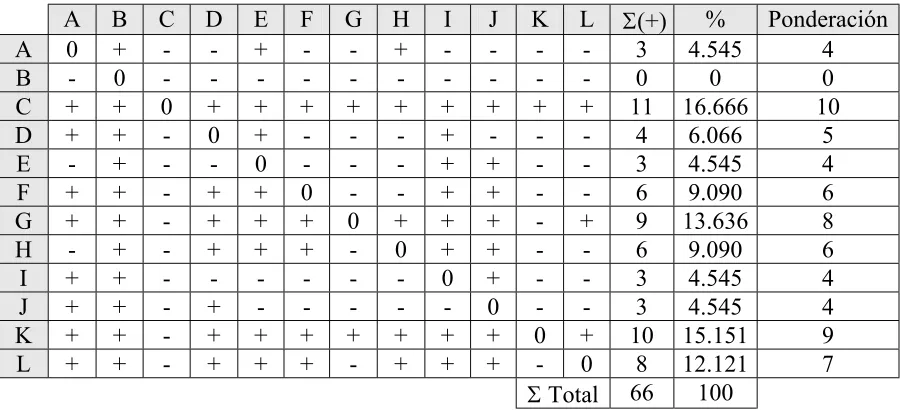
Tabla 3.2 Ponderación de requerimientos deseables 77
Tabla 3.3 Resultado de la ponderación de requerimientos deseables por orden de importancia.
77
Tabla 3.4 Estudio comparativo con sistemas de suspensión y dirección de carros SAE Mini Baja
79
Tabla 3.5 Traducción de los requerimientos del cliente en términos mensurables de ingeniería.
82
Tabla 3.6 Establecimiento de las metas de diseño. 84
Tabla 3.7 Despliegue de funciones de calidad 87
Tabla 3.8 Evaluación de conceptos utilizando las técnicas de Ullman 91
Tabla 3.9 Valor de R en función de λ 104
Tabla 3.10 Valores obtenidos en ADAMS/View 105
Tabla 3.11 Ángulos de Dirección. 111
Tabla 4.1 Ángulos teóricos y reales de viraje a la izquierda Posición extremo-extremo de la dirección.
138
Tabla 4.2 Valores obtenidos en ADAMS/View 138
Simbología
α Angulo de viraje, rueda derecha
β Angulo de viraje, rueda izquierda
g´s Gravedad 9.81 m/seg2 o 386 pulgadas/seg2
π Relación constante entre el diámetro y a la circunferencia (3.14159)
n
f Frecuencia natural no amortiguada en Hertz
s
ζ Relación de amortiguamiento
γ Angulo que forman el brazo de dirección y la línea entre puntos de pivote.
η Angulo de viraje, rueda izquierda
µ Angulo de viraje, rueda derecha
Σ Sumatoria
Φ Diámetro
“i” Inclinación del eje de pivotamiento, salida o King-Pin. 2a Distancia entre puntos de pivote de ruedas delanteras.
a Brazo de palanca que tenderá a abrir la parte delantera de la rueda hacia fuera. cg Centro de gravedad
Cs Coeficiente de amortiguamiento de la suspensión
d Diámetro del alambre de un resorte (metros)
D Diámetro medio de la espira (metros) D Diámetro de paso del piñón de cremallera
ϖ d Frecuencia natural con amortiguamiento
e Distancia entre centros de ejes de llantas.
Fr Fuerza equivalente a la resistencia a la rodadura de la rueda FR Fuerza en el resorte
G Módulo torsional (Pascales) Hz Hertz
in. Pulgadas.
k1 Constante de rigidez de resorte 1
k2 Constante de rigidez de resorte 2
k3 Constante de rigidez de resorte 3
k4 Constante de rigidez de resorte 4
Keq Constante de rigidez equivalente
Ks Rigidez de la suspensión
Kt Rigidez de la llanta
L Longitud del desplazamiento total de la cremallera m Metros
M Masa de la masa suspendida.
N Número de espiras del resorte
ϖ n Frecuencia natural no amortiguada en radianes por segundo.
p Velocidad de giro alrededor del eje x psi. Libras sobre pulgada cuadrada
PV Relación presión-velocidad para materiales de Poliamida. q Velocidad de inclinación alrededor del eje y
R Radio de giro
R Longitud, en metros, de las palancas o brazos de dirección r Velocidad de derrape alrededor del eje z
r Relación piñón diámetro RR Rango de rigidez
T Tiempo en segundos
V Velocidad vertical de la masa suspendida
x Eje longitudinal de simetría y en dirección del movimiento al frente del carro. y Eje en el plano transversal y del lado derecho del vehículo
Resumen
Este trabajo contiene el diseño de la suspensión y dirección de un automóvil de competencia SAE Mini Baja. Se hace el estudio completo de los ángulos de dirección y suspensión, para obtener los ángulos óptimos que proporcionen un excelente manejo y control del carro. Se presentan los dibujos de detalle para la fabricación total de los componentes teniendo en consideración fabricarlos con métodos convencionales.
El proyecto se complemento con la fabricación del prototipo y la participación en tres carreras; dos nacionales y una internacional. Se considera también hacer pruebas al prototipo para comparar los cálculos teóricos.
Abstract
This document is about the design of suspension and steering Mini Baja all terrain car. This thesis studies the angles of direction and steering to get the best angles that give the car an excellent ride and control. It show the detail drawings to make the components, but thinking on make them with conventional methods.
Introducción.
Uno de los aspectos primordiales que se sienten al momento de manejar un automóvil es la suspensión y dirección, pues es a través de estos sistemas que el conductor y pasajeros sienten en cierta medida las condiciones del camino.
La comodidad, confort así como la salud de los pasajeros dependerá de que tan bien aísle la suspensión, las irregularidades del camino. Es bien conocida la diferencia entre viajar en un auto con suspensión dura como en el caso de camiones y camionetas, a viajar en autos de lujo cuya suspensión aísla muy bien a los ocupantes de las asperezas del camino.
La suspensión en un carro todo terreno se puede decir que es el sistema más importante que actúa durante el recorrido y es por ello que se debe poner mucha atención y cuidado en su diseño.
La dirección también es un sistema de suma importancia, ya que es a través de éste, que se tiene el control de la dirección del vehículo; una dirección suave y que proporcione buena respuesta, no causará fatiga ni estrés al conductor, además de ser más segura.
La presente tesis trata sobre el diseño de la suspensión y dirección de un auto de competencia todo terreno. Lo que se pretende es hacer un trabajo formal que incluya todos los análisis necesarios para que el vehículo pueda desempeñarse sin ningún contratiempo.
Paralelo al desarrollo de esta tesis, se diseñó y fabricó el prototipo, y durante ese tiempo, se adquirió cierta experiencia en cuanto al desempeño general de estos carros. El realizar un prototipo tiene la ventaja de conocer aspectos de diseño que no se contemplan al realizar un estudio puramente teórico. Para diseñar y construir el carro se consultaron diferentes fuentes, el criterio de diseño se basó en el estudio de las características generales en un automóvil, análisis de geometrías y estética general. Los cálculos se generaron a partir de la literatura existente. Se hace uso paquete de análisis dinámico ADAMS/View V.11 para facilitar el estudio de las geometrías y cinemática de ambos sistemas.
Este vehículo se diseño para competir en las carreras organizadas por SAE (Society of Automotive Engineers), el trazo de las pistas se hace sobre terrenos bastante irregulares, que incluyen pendientes muy pronunciadas, terrenos rocosos, zonas de arbustos, tierra suelta, lodo, topes, planicies, vueltas muy cerraras, etc.
Es común observar en este tipo de competencias que los autos se averían en la primera etapa de la carrera por no contar con un buen diseño de su suspensión y en ocasiones por falta de pericia de los pilotos que por ser estudiantes, la mayoría de ellos no cuentan con la experiencia necesaria para manejar en este tipo de caminos.
El prototipo se corrió en dos carreras organizadas en México. (Toluca; noviembre 2 002 y Querétaro; febrero 2003). En estas carreras se adquirió mayor experiencia sobre el tipo de pistas y los detalles que se deben cuidar en el diseño y construcción del carro. Estas dos carreras propiciaron que se realizaran modificaciones a algunos elementos que presentaron fallas, o que a criterio, se supuso que podrían suceder.
Justificación
Este trabajo se justifica por lo siguiente:
Proporcionara experiencia en carreras SAE Mini Baja a la SEPI y en especial al área de Ingeniería del Transporte
Aportará un prototipo de un carro SAE Mini Baja a la SEPI ESIME ZAC.
Se diseñaran conjuntamente los sistemas de chasis, dirección, suspensión, y transmisión
Se representará al IPN como institución, así como al país en la carrera internacional SAE Mini Baja 2003.
Se propone el diseño de cada sistema utilizando la técnica del QFD
Es un proyecto de aplicación teórica, practica y organizacional
Puede servir de inspiración a quien desee iniciar una empresa en la fabricación de este tipo de carros.
Generará bastante información en cuanto al diseño, análisis y construcción de sistemas automotrices, quedando esto, como acervo de la SEPI – ESIME
ALCANCE
En este trabajo se realiza el diseño completo de los sistemas de suspensión y dirección de un carro SAE Mini Baja, así como su construcción. Se hace también análisis dinámico para medir los ángulos de las llantas y mecanismo de dirección, cuando la llanta viaja verticalmente.
Se estiman tiempos para el diseño, construcción y pruebas con el prototipo para validar el cálculo teórico.
OBJETIVO
C
C
a
a
p
p
í
í
t
t
u
u
l
l
o
o
1
1
G
G
e
e
n
n
e
e
r
r
a
a
l
l
i
i
d
d
a
a
d
d
e
e
s
s
s
s
o
o
b
b
r
r
e
e
S
S
u
u
s
s
p
p
e
e
n
n
s
s
i
i
o
o
n
n
e
e
s
s
y
y
D
D
i
i
r
r
e
e
c
c
c
c
i
i
o
o
n
n
e
e
s
s
e
e
n
n
V
V
e
e
h
h
í
í
c
c
u
u
l
l
o
o
s
s
T
T
o
o
d
d
o
o
T
T
e
e
r
r
r
r
e
e
n
n
o
o
.
“La máquina “automovile”, como concepto de desplazamiento es un sentimiento permanente en la sociedad y su futuro está asegurado en el horizonte de la humanidad.”
Juan F. Dols Ruiz.
1.1 La Historia del Automóvil en el Mundo.
El comienzo de los primeros vehículos con motor ocurrió alrededor de 1769, cuando el ingeniero militar francés, Nicholas Joseph Cugnot (1725-1801) construyó un vehículo con tres ruedas impulsado con vapor, tal como se muestra en la Fig. 1.1. Este carro consistía de un armazón formado por vigas y ruedas de madera recubiertas por una lámina de hierro, era pesada y no contaba con sistema de suspensión. El propósito de este carro fue transportar piezas de artillería. Pocos años después un modelo mejorado fue construido, pero no duró mucho porque durante sus pruebas se estrelló contra la pared causando el primer accidente automotriz. Éste fue seguido por un vehículo de vapor construido en 1784 por el ingeniero, James Watt (1736-1819).
Fig. 1.1 Vehículo con tres ruedas, impulsado con vapor, con el propósito de transportar piezas de artillería
Para 1802, Richard Trevithich (1771-1833) de nacionalidad inglesa, desarrolló un carruaje de vapor que viajaba de Cornwall a Londres. Este encontró su fin cuando se quemó una noche después de que Trevithich olvidó apagar el fuego de la caldera. Sin embargo, el
la competencia con los ferrocarriles y leyes más estrictas en contra de la velocidad, produjo el fin de los carruajes de vapor.
El primer automóvil impulsado por un motor a gasolina se produjo en 1886 dándole el crédito a Kart Benz (1844-1929) y Gottlieb Daimler (1834-1900) trabajando independientemente. A finales del siglo XIX los automóviles fueron desarrollados por otros pioneros como fueron Rene Panhard, Emile Lavassor, Armand Peugeot, Frank y Charles Duryea, Henry Ford y Ransom Olds entre otros. Para 1908 la industria automotriz se estableció en los Estados Unidos con Henry Ford, fabricando su famoso modelo T mostrado en la figura 1.2 y la General Motors Corporation fue fundada. En Europa las compañías familiares como Daimler, Opel. Renaul, Benz y Peugeot fueron reconocidas como productoras de automóviles. Es importante observar que para el año de 1909, alrededor de 600 marcas de automóviles americanos han sido identificados. [1.1]
Fig. 1.2 Ford T, fabricado en E. U. Fig. 1.3 Ejemplo de los llamados SUV a principios del siglo XX (Sport Utility Vehicle)
La cronología de los automóviles es muy extensa y existen varias clasificaciones según los deseos del autor por querer resaltar alguna aplicación o característica particular, tales como, por su uso, tamaño, número de pasajeros, sistemas de propulsión, tipo de combustible, número de ruedas, carrocería empleada etc. Para el estudio de este capítulo, en el cuadro 1,1 se hace una clasificación a grandes rasgos para mostrar las aplicaciones de los vehículos todo terreno y especialmente para ubicar en qué categoría se encuentran los vehículos SAE Mini Baja.
Tabla 1.1 Clasificación de autos todo terreno según su uso.
Tipo de uso Ejemplos
Pick-ups 4x4
Vehículos para nieve
Para trabajo Vehículos de rescate
Patrullas fronterizas
Tractores agrícolas
Vehículos para vías de ferrocarril
Carreras 4 x 4
París - Dakar
Deportivo y Rallys
recreativo Baja mil
Exhibiciones todo terreno
SAE Mini Baja
Anfibios
Militares Tanques
Transporte de soldados
Jeeps
Doméstico y uso Camionetas de lujo.
diario Sedanes
Uso especial Vehículos lunares
1.2 Evolución
Histórica de los Sistemas de Suspensión y Dirección.
La historia de las suspensiones es tan antigua como la de los carruajes egipcios, por ejemplo, una forma primitiva de muelle se utilizó en el carro de guerra del faraón egipcio Tutankhamen hacia el año 1350 a. JC. El piso estaba formado por tiras de cuero entrecruzadas, que seguramente absorberían parte de las sacudidas de la incómoda marcha.
Mas adelante, en la edad media, viajar sobre ruedas resultaba incómodo y lento, por lo que los vehículos de pasajeros eran escasos, los pobres iban a pie y los pudientes montaban a caballo o mulas. Sólo la realeza o damas de alcurnia, o los que no podían montar a caballo a causa de la edad o enfermedad, se permitían el “lujo” de viajar en un carro cubierto, muy almohadillado pero lento y sin suspensión.
Para maniobrar un carruaje, el eje delantero giraba sobre un pivote central, lo cual, además de poco seguro, reducía el radio de giro. La solución más eficaz consistía en colocar las ruedas delanteras en un dispositivo, separado y giratorio, hasta que el austriaco Georg Lenkensperger introdujo su sistema de dirección en el siglo XIX. Este permitía que las ruedas delanteras girasen solidarias en los extremos de un eje fijo, este sistema se usa aún en las suspensiones de eje rígido.
Los muelles metálicos más antiguos fueron los de ballesta, inventados para los carruajes del siglo XVI, pero no adoptados extensamente hasta mediados del XVIII. La ballesta consta de una serie de láminas o flejes estrechos y ligeramente curvos, de igual anchura pero distinta longitud, sujetos con láminas más cortas en el centro. Los extremos curvos de los flejes más largos se articulaban con los bordes de la carrocería del vehículo , y el centro de la ballesta, que es la parte más gruesa, iba unido al eje de la rueda. Con esto se conseguía un arco flexible, capaz de absorber las oscilaciones. Las ballestas se usan todavía en los camiones y en algunos automóviles de eje rígido.
Desde la remota antigüedad se sabía que los materiales elásticos resisten tanto a la torsión como a la flexión. Uno de los primeros usos del caucho, descubierto a principios del siglo XIX, fue precisamente para sustituir los muelles. En 1826, el inglés H. C. Lacy patentó unos cubos de caucho para reemplazar los muelles de acero que se usaban en los coches particulares, y en 1845 se empezaron a usar amortiguadores de caucho en los topes de los vagones ferroviarios.
Los muelles helicoidales, aparecidos a mediados del siglo XVIII; son probablemente los más usados, especialmente en sillones y colchones. Hacia 1950, la compañía francesa Citroën introdujo la suspensión hidráulica, en la que amortiguadores hidroneumáticos utilizan un fluido y gas nitrógeno para absorber las sacudidas.
de caballos, los primeros constructores transfirieron la técnica de la suspensión de los carruajes a los coches. Estas técnicas preveían dos ejes rígidos unidos a la caja del vehículo mediante ballestas longitudinales o transversales. Las ruedas estaban forradas de hierro y faltaban los amortiguadores verdaderos. No obstante, el rozamiento de las hojas de las ballestas entre sí facilitaba un cierto amortiguamiento.
El estado de las carreteras, la escasa adherencia ofrecida por las ruedas y la limitada velocidad (consecuencia de los dos primeros factores, más que de la potencia de los motores) no exigieron las sofisticaciones alcanzadas por otros órganos del vehículo en los primeros años del siglo XX. A pesar de que las primeras suspensiones independientes aparecieron alrededor de 1903, la gran masa de los constructores se orientó hacia soluciones estándar (en general, ejes rígidos con ballestas y asentamiento con notable ángulo de caída (positivo delantero), que se mantuvieron en vigor hasta los años 30, cuando no tuvieron ya una justificación clara.
La primera gran revolución, sobre todo respecto al confort de marcha, fue el neumático, que obligó a una puesta al día de las suspensiones alrededor de 1920, cuando se introdujo el tipo balón. Los 100 años de evolución de las suspensiones del automóvil se pueden dividir en tres fases, cada una caracterizada por una fisonomía particular. [1.2]
De 1885 a 1920: El paso del diseño de los carruajes hacia técnicas más adecuadas, por principios de construcción y por prestaciones, a un vehículo de motor. Los esquemas de construcción permanecieron, aunque fueron innumerables los intentos de otras soluciones. La figura 1.4 muestra uno de los primeros automóviles movidos por motor de explosión. El sistema de suspensión era similar al utilizado en los carruajes tirados por caballos.
Nótese en la figura 1.4, que la suspensión solo consistía de muelles elípticas, y el sistema de dirección era solo un manubrio unido al eje delantero, con la cuál el conductor hacia girar ambas ruedas. El inconveniente era que la dirección era muy inestable y el radio resultaba amplio.
Con la constante búsqueda de mejoras en los automóviles, el sistema de dirección se mejoró y se empezaron a usar volantes y sistemas de palancas que permitían una dirección mejor controlada aunque un poco dura. Los sistemas de suspensión solo variaron un poco, ya que el uso de muelles elípticas y en forma de “C” continuaron en uso. La figura 1.5 muestra un auto con dirección controlada por volante y palancas. Nótese el uso de muelles elípticas y el sistema de ruedas directrices, pivotadas en forma independiente sobre un eje rígido.
Fig. 1.5 Coche Holandés; Spyker de 4 cilindros, 1904 [1.3]
De 1920 a 1955: Búsqueda de soluciones con prestaciones presentes y una estabilidad, que hacía poco, se había convertido en una exigencia fundamental. En este periodo fue cuando se produjo la progresiva diferenciación de los esquemas de las suspensiones en función del tipo de coche (posición del motor, tipo de propulsión, condiciones de carga, etc.). En el sector de los coches de prestigio y de competencia se produjo el desarrollo de esquemas nuevos, más complejos, en búsqueda del confort y las prestaciones más sofisticadas.
costo, mayor fiabilidad, menor mantenimiento). Con mismos objetivos se actuó en busca de soluciones nuevas. También se propusieron algunos esquemas antiguos originales, como el De Dion, el tipo Rover, de las suspensiones intercomunicadas, etc. Desde el punto de vista propagandístico, las soluciones de reclamo encuentran justificación en las tecnologías que permiten ahora una notable reducción de los costos, siendo utilizadas en coches de prestigio, o bien ante la necesidad de ofrecerlas al público, que todavía es atraído por la complejidad técnica.
Desde el punto de vista funcional, es necesario subrayar que un cierto esquema de suspensión difícilmente tiene de por sí, unas dotes de estabilidad y de confort superiores a cualquier otro tipo, en el sentido de que el diseño de aplicación de cada esquema y otros numerosos factores (asentamiento, elasticidad, amortiguadores y, sobre todo, la geometría) pueden modificar completamente el comportamiento. Por ejemplo, una buena suspensión de puente rígido puede comportarse mejor, en cuanto a estabilidad, que una sofisticada pero mal realizada suspensión De Dion.
1.3 Importancia de las Masas Suspendidas
Un elemento muy importante que está por encima de la investigación cinemática y dinámica de las suspensiones, es el representado por la relación que existe entre las masas suspendidas y las no suspendidas que posee el vehículo, cuanto más ligeros son todos los elementos relacionados con contacto con el terreno (neumáticos, frenos, órganos de elasticidad, y parte de los amortiguadores) respecto a la carga que gravita sobre cada rueda (chasis, carrocería motor, transmisión, pasajeros), tanto menores resultan los rebotes del neumático sobre la superficie del camino, y se debe tener presente que, cuanto más tiempo está el neumático en contacto con el suelo, respecto al tiempo que no lo está, más aumenta su adherencia al piso y por lo tanto se tiene un mejor control del carro.
En los carros de turismo, en comparación con los coches de competencia, se puede decir que debe ofrecer sobre todo confort y seguridad de marcha en todas las posiciones y terrenos, además de una dirección rigurosamente precisa. En las curvas se exige una notable estabilidad, mientras que la adherencia en la carretera puede ser limitada a aceleraciones
laterales de 0.6 – 0.7 g, y una conducción ligera y no fatigable, cualidades ligadas a los
parámetros característicos de suspensiones; en cambio, en un coche de carreras se exige una gran adherencia en todas las posiciones, gran velocidad en las curvas y elevadas aceleraciones
laterales (con valores del orden de 1.45 – 1.6 g, además de una gran precisión de conducción,
aunque el coche resulte duro, rígido y poco confortable. Todo esto se consigue con suspensiones de rótulas esféricas o articulaciones metálicas, gran rigidez de los elementos de las suspensiones y del bastidor, un mecanismo de la dirección muy sencillo, y una barra estabilizadora muy eficaz y muy rígida.
En los más avanzados esquemas de las suspensiones, se busca obtener la llamada "flexibilidad variable", o sea, un progresivo endurecimiento al incrementarse la carga, independientemente de las características elásticas del muelle. El resultado obtenido mediante oportunos mecanismos cinemáticos, permite obtener un comportamiento relativamente blando para pequeños desplazamientos y un endurecimiento para las solicitaciones mayores.
Desde el punto de vista del comportamiento en marcha, este sistema permite una buena aptitud para absorber las pequeñas irregularidades del terreno, sin tener desplazamientos elevados como consecuencia de transferencias de carga en aceleraciones, frenados y en las curvas, todo lo cual contribuye eficazmente al confort de marcha.
1.4 Cualidades y Características de Manejo de un Automóvil.
Una característica de suma importancia para que el vehículo posea cualidades de manejo y viraje, es que debe mantener rigidez en cualquier dirección, ya que al girar las ruedas en el sentido deseado el vehículo no debe resistirse
El resorte o las muelles son el lazo de unión en lo que se conoce como masas suspendidas (piezas que se encuentran arriba de los ejes) y las masas no suspendidas (ejes, llantas, elementos de sujeción, etc.
Las muelles de hojas dan elasticidad en el plano vertical, rigidez y resistencia a la flexión en el plano horizontal. Con estas características se puede asumir que se puede realizar la unión entre las masas suspendidas y las no suspendidas, transmitir fuerzas de tracción, frenado, torsión, conducción, impacto, etc.
El permitir que las ruedas se muevan hacia arriba y hacia abajo con respecto a las masas suspendidas es la función básica de la suspensión. Al golpear un borde de 8 cm de altura a 50 km/h, sin muelles que disipen la fuerza de la aceleración, se ha medido una fuerza de 7.5 g, lo cual da una idea de las dimensiones y tipos de materiales que se necesitan para diseñar y seleccionar en un vehículo. Además sería imposible que los pasajeros resistieran impactos de esta magnitud. Con lo expuesto se da una idea de la importancia de la suspensión.
Lo que hace la muelle al flexionarse cuando recibe carga, es absorber gran parte de la carga y disiparla en forma de energía calorífica, así mismo como alargar el tiempo en que la carga aplicada a la muelle se aplica a su vez al resto del vehículo. Recordando el ejemplo del borde de 8 cm a 50 km/h, la muelle absorbería el impacto en un octavo de seg., en vez de un dieciseisavo que una rueda rígida (sin muelles), la aceleración vertical aplicada se ve reducida a 1 g que son valores aceptables para el cuerpo humano.
Debido a que los resortes se deforman al aplicarse una fuerza y al cesar esta, su oscilación es teóricamente infinita, esta ley se cumple en las muelles, por lo cual hubo que desarrollar un elemento que permitiera absorber las ondulaciones. Ya que las masas suspendidas se sujetan en las muelles, la carrocería oscila, sin embargo con los amortiguadores se controla y reduce al mínimo los niveles de vibración. La frecuencia de la mayoría de los sistemas de suspensión modernos es entre 70 -80 c/min. - 1.16 a 1.33 Hz.
La amplitud de las oscilaciones es usualmente entre 30 - 80 mm., aunque varía mucho con las condiciones del camino y velocidad de operación del vehículo.
Cuando el vehículo en marcha tropieza con algún obstáculo, las muelles del sistema absorben la energía y la disipan para devolver a las masas suspendidas a su posición original; la función del amortiguador es absorber gran parte de esa energía y disiparla en forma de calor y trabajo mecánico. (movimiento de fluidos), resultando con esto un retorno más lento a la posición estable y sobre todo con un menor número de ciclos y cada ciclo a su vez de menor amplitud. El amortiguador hidráulico es definido como un dispositivo hidro-mecánico que absorbe, transforma y disipa la energía de un sistema vibratorio.
Basándose en el principio de la conservación de la energía se puede establecer lo siguiente :
La energía proporcionada por la vibración de masas en el sistema se convierte en energía mecánica en forma de movimiento relativo entre el cuerpo del amortiguador y el embolo del mismo y en compresión y dilatación de los bujes de hule en los soportes y conexiones del amortiguador al sistema. En estos últimos, la energía se disipa en forma de energía calorífica, en tanto que en el interior de un amortiguador se manifiesta como:
-Energía mecánica por movimiento de fluidos
-Energía mecánica por movimiento de válvulas y componentes -Energía térmica por fricciones mecánicas
-Energía térmica por movimiento de fluidos y turbulencias -Energía térmica por fricciones intermoleculares
-Energía acústica por fluidos y turbulencias -Energía acústica por fricción.
Un vehículo sustentado en sus resortes y llantas, es un sistema sumamente complicado, en él se encuentran las masas suspendidas, las no suspendidas y ocho diferentes resortes (4 muelles, 4 llantas).
1.- Mecimiento con respecto al eje longitudinal 2.- Balanceo con respecto al eje transversal 3.- El vaivén con respecto al eje vertical
Puesto que un vehículo es un cuerpo en el espacio, presenta 18 grados de libertad; sin embargo, gran parte de ellos carecen de importancia, los más importantes son:
1.- El vaivén hacia arriba y hacia abajo de las masas suspendidas 2.- El balanceo de las masas suspendidas
3.- El vaivén hacia arriba y hacia abajo de los ejes 4.- El mecimiento de los ejes.
Los elementos elásticos del sistema de suspensión se pueden dividir en dos grupos, en función de las características de rigidez de estos. El primer grupo lo componen aquellos elementos con característica lineal y el segundo grupo aquellos en que su característica de rigidez es no lineal. Sin embargo, pueden existir una combinación de ambos.
Para el caso de resortes helicoidales el comportamiento de su rigidez es lineal, por lo que el análisis de una suspensión de este tipo, es más sencillo que el de una suspensión de aire, la cual es no lineal.
1.5 Importancia de las Suspensiones, respecto a la Salud Humana.
Uno de los más importantes aspectos en el diseño de un vehículo es la suspensión. Con esta palabra se abarca no solo los resortes u otros medios mediante los cuales la carrocería es protegida de los impactos a los que las ruedas se ven inevitablemente sujetas, estos impactos son generados por la reacción del camino sobre el tren de rodaje, desbalance de las masas del motor y piezas del sistema de transmisión. Estos impactos producen vibraciones mecánicas y las mismas son la causa principal de cansancio en las personas y fracturas en partes mecánicas y estructurales. Para disminuir el efecto de los impactos sobre las personas que ocupan cualquier tipo de vehículo, se coloca el llamado sistema de suspensión, abarcando amortiguadores, barras estabilizadoras, barras de torsión y otros dispositivos que por lo general están escondidos debajo del vehículo, pero que tienen un efecto directo y fundamental sobre la conducción.
El cuerpo humano, reacciona a las vibraciones de diferentes formas dependiendo de la posición en que se encuentre: parado, sentado, acostado, etc., así como a la posición del eje de vibraciones: transversal, vertical, etc. La persona sentada percibe más intensamente el efecto de las vibraciones verticales de baja frecuencia en el rango de 0 -100 Hz. [1.5]
Las investigaciones realizadas mediante vibradores especiales y aparatos de rayos "x" sobre personas sometidas a vibraciones verticales, han dado por resultado, entre otros, que las vibraciones más perceptibles por el hombre son las de 5 -20 Hz. con estas frecuencias entran en resonancia la cabeza y los órganos internos del hombre. [1.5]
Uno de los primeros y en la actualidad muy usado, es el criterio de la menor frecuencia libre sin amortiguamiento sobre la carrocería. Este criterio se basa en que si esta frecuencia corresponde con el número de impulsos que percibe una persona caminando, entonces los ocupantes de un vehículo en movimiento no sentirán una sensación desagradable. El número de impulsos que recibe una persona caminando, depende de la longitud de su paso y de la velocidad con que se mueve. Debido a que la velocidad promedio del hombre caminando oscila entre 3 - 4 km/hr. con un paso de 0.75 m, las frecuencias libres sin amortiguamiento son entre 65 -90 ciclos/min. – 1 a 1.5 Hz.
1.6 Vehiculos Todo Terreno
El presente trabajo se enfoca en características de un carro todo terreno, por lo que ahora se explicará el porque surgió la necesidad de diseñar este tipo de vehículos y cuales son sus principales características.
La mayoría de automóviles se diseñan pensando en que la mayor parte del tiempo que estarán en uso, se conducirán por caminos pavimentados, de terrecería o por lo menos de una superficie regular. Debido a la necesidad de transitar por lugares en donde aún no existen caminos, o los que existen presentan gran deterioro como para poder ser atravesados por un auto de características normales, se pensó en hacer carros que pudieran librar todos aquellos obstáculos que otros no lo podían hacer.
En los inicios de los automóviles se pensó no solo en utilizarlos en ciudades y
carreteras, si no también para el trabajo en granjas, como es el caso de los tractores o para hacer expediciones. Por lo tanto, el propósito inicial de los vehículos todo terreno fue el de poder circular por lugares en donde los carros normales no pueden hacerlo.
otros vehículos denominados todo terreno, han ido evolucionando, así como los aditamentos y equipo para circular por caminos cada vez más difíciles.
Una característica de casi todos los vehículos todo terreno fabricados en serie es que cuentan con un sistema de tracción en las cuatro ruedas; llamado doble tracción, lo que es diferente a los autos normales que solo cuentan con transmisión en dos ruedas, ya sea en las delanteras o en las traseras. Algunas de estas características se añaden no solo a automóviles de serie, sino también a los de exhibición y competencia.
Desde sus inicios, los fabricantes de automóviles y agrupaciones de ellos han creado competencias para comparar las características y adelantos de sus carros. Esto dio origen a un deporte conocido como automovilismo y dentro de este existen varias categorías, así como diferentes tipos de competencia. Una de las clasificaciones es la de carreras de autos tipo todo terreno, la que a su vez, tiene diferentes categorías y tipos.
1.6.1 Tipos de Vehiculos Todo Terreno
Existen numerosos tipos de esta clase de carros, casi cada marca tiene algún modelo todo terreno. Las características que ofrecen estos vehículos van desde los puramente funcionales, es decir, específicamente para transitar por este tipo de caminos como los Jeeps o Hummbies del ejercito, hasta los que son de lujo como es el caso de los llamados SUV (Sport Utility Vehicle), que cuentan con sistemas completos de aire acondicionado, computadora de viaje, equipo de sonido, suspensiones y direcciones asistidas, etc.
Las características principales de estos vehículos son que cuentan con suspensiones especiales, ya sea independientes o de eje rígido, transmisión en las cuatro ruedas, son altos, y de construcción más robusta que los automóviles normales, su precio es elevado debido a que cuentan con un mayor equipamiento en la transmisión y suspensión.
Existen también los carros de competencia, los cuales varían aún más que los de línea porque son diseñados y construidos especialmente para las condiciones de la pista en donde correrán. Un ejemplo de estos son los construidos para competencias internacionales que se corren en nuestro país, tales como la Baja Mil, o la Baja 500, la figura 1.6 muestra un carro de competencia de este tipo de eventos.
En México se realizan varias competencias de carros todo terreno en cada una de
ellas participan carros de diferentes tipos, algunos de ellos son vehículos de serie arreglados
Fig. 1.6 Carro de carreras tipo todo terreno, categoría Baja Mil.
También existen automóviles que se utilizan para trabajo y uso militar. Los carros de trabajo van desde tractores, camionetas pick up, jeeps, cuatrimotos, etc. Los carros de uso militar son de construcción aún más robusta y con sistemas de transmisión, suspensión y dirección especiales, estos abarcan desde tanques de guerra, camiones, anfibios, jeeps, hummbiees, etc.
Un ejemplo de carros de trabajo es el versátil carro alemán Unimog, fabricado por la firma Daimler – Benz, el cual es considerado como uno de los mejores vehículos todo terreno de uso rudo, este transporte es capaz de trabajar en condiciones extremas como rescate, industria ferroviaria y militar, la figura 1.7 muestra uno de los primeros vehículos Unimog usados a finales de la segunda guerra mundial.
1.7 Vehículos SAE Mini Baja.
Los carros SAE Mini Baja son creados por estudiantes de universidades de diferentes países, con el objetivo de aplicar sus conocimientos y habilidades adquiridos durante su formación profesional, así como propiciar la experiencia en proyectos reales de ingeniería. Los vehículos son diseñados bajo ciertas normas especificadas por SAE; el motor, medidas generales, y los aspectos de seguridad son estandarizados para todos los carros. Estos carros se prueban en eventos organizados anualmente en Estados Unidos y otros países como Brasil, Sudáfrica, Corea y México.
En vehículos SAE Mini Baja, las condiciones del terreno son determinantes para el diseño de los sistemas, en especial la suspensión, que es uno de que tienen mayor probabilidad de fallar, porque la prueba principal es una carrera de 4 horas de duración en condiciones extremas sobre lodo, nieve, rocas, troncos, vados con agua, pendientes muy pronunciadas, volcaduras, choques, etc.
Debido a que es un auto monoplaza y su tamaño está restringido por las normas de SAE Mini Baja, el carro es de dimensiones pequeñas; no mayores a 152.4 cms. (ancho total con todo y ruedas) x 243.84 cms. (largo total con todo y ruedas), esta ventaja hace posible tener una distancia corta entre ejes y por lo tanto puede atravesar por lugares con obstáculos grandes.
Para este tipo de competencias la suspensión y dirección deben reunir los siguientes aspectos fundamentales: buena altura con respecto al piso; mayor de 30 centímetros, amplio viaje de la suspensión; entre 12 y 20 centímetros es suficiente, llantas anchas, altas y con una presión de aire que le permita rebotar si es necesario, el radio de giro lo recomiendan diseñar no mayor a 2.5 metros
Para la competencia Mini Baja West, existe una prueba llamada “Paso sobre rocas”, la cual consiste en un circuito estrecho, formado por grandes rocas, vados y curvas El carro debe pasar por ellas en el mejor tiempo posible y sin tocar o derribar los conos que indican el recorrido, para demostrar el desempeño de su suspensión y potencia.
Si se desea conocer más información acerca de competencias Mini Baja se puede consultar las referencias. 1.6, 1.7 y 1.8.
1.8 Definición del Problema.
La suspensión de autos todo terreno, está sometida constantemente a cambios bruscos de fuerzas, durante un número elevado de ciclos tal que sus elementos están propensos a fallar en cualquier instante, de no contar con un buen análisis y diseño, los elementos más críticos son las rótulas, llantas, los brazos y el poste de dirección. Las llantas pueden fallar por un golpe fuerte sobre una roca, por elementos punzantes, o por una volcadura, la cual, puede dañar severamente al chasis, suspensión y transmisión.
Una de las piezas más importantes en la suspensión delantera es el poste de la dirección, llamada en ingles knuckle, la cual conjunta las rotulas de la suspensión, los rodamientos y soporte de la llanta, así como el brazo de dirección que lo hace girar alrededor del eje imaginario formado por las rótulas.
Por lo tanto, para el diseño de esta pieza se requiere el análisis de los esfuerzos a los que estará sometido, así como de la forma y dimensiones necesarias para trabajar correctamente en cada uno de los ángulos de dirección requeridos. En carreras Mini Baja es común que un mal diseño provoque que esta pieza falle por fractura o proporcione un mal funcionamiento a la dirección, ocasionando daño en las rótulas y varillaje.
El presente trabajo pretende hacer un análisis y diseño adecuado para cada elemento de los sistemas de suspensión y dirección, integrando todos los ángulos y dimensiones de estos sistemas, que sea de geometría sencilla para que su manufactura sea posible y su resistencia le permita terminar las carreras a las que asistirá, sin que sufra daños considerables, además de hacer una óptima selección de los componentes que vayan a ser comprados e integrarlos para así asegurar un buen desempeño de ellos.
También se estudiará la forma de que la suspensión no provoque oscilaciones que afecten la salud del conductor, durante una carrera de 4 horas, sometido a cambios constantes y aleatorios del camino.
Se pretende al terminar esta tesis, haber asistido a tres carreras en donde se pondrá a prueba el diseño de todo el carro, por lo que, el diseño de la suspensión y dirección tendrá que ser compatible con el diseño del chasis y transmisión.
1.9 Referencias.
1.1 Thomas D. Gillespie, Fundamentals of Vehicle Dynamics, SAE 400 Commonwealth Drive Warrendale, PA 15096-0001,.
1.2 José Font Mezquita, Juan F. Dols, Tratado sobre Automóviles, Tomo I, Universidad Politécnica de Valencia. Alfaomega 2001.
1.3 Selecciones; Inventos que cambiaron al mundo, Reader´s Digest de México, 1983.
1.4 Jesús Calvo Martín, Antonio Miravete de Marco, Mecánica del Automóvil Actualizada, Universidad de Zaragoza, 1997.
1.5 Daniel Amaro Barrera, Miguel A. Ponce García, Modelo Matemático Para el Diseño de una Suspensión con Muelles Elípticas, Instituto Tecnológico de Tlalnepantla, Centro de Graduados e Investigación, 2000.
1.6 www.sae.org
1.7 Plata Contreras Gerardo. Diseño, Análisis y Construcción de un carro SAE Mini Baja, Tesis de Maestría. SEPI-ESIME-IPN. México, 2003.
C
C
a
a
p
p
í
í
t
t
u
u
l
l
o
o
2
2
A
A
s
s
p
p
e
e
c
c
t
t
o
o
s
s
T
T
e
e
ó
ó
r
r
i
i
c
c
o
o
s
s
s
s
o
o
b
b
r
r
e
e
S
S
u
u
s
s
p
p
e
e
n
n
s
s
i
i
o
o
n
n
e
e
s
s
y
y
D
D
i
i
r
r
e
e
c
c
c
c
i
i
o
o
n
n
e
e
s
s
.
.
El diseño de la suspensión y dirección requiere de un estudio completo acerca de la cinemática, dinámica y geometrías necesarias para obtener un buen desempeño, sobretodo porque la suspensión es el sistema que soporta el carro y aísla a sus ocupantes de los impactos generados por las irregularidades del camino, además de que debe transmitir la menor cantidad de energía posible al chasis
“Si pude ver más lejos, es porque estuve parado sobre los hombros de gigantes”.
Isaac Newton.
2.1 Aspectos Teóricos sobre Direcciones.
La dirección es el conjunto de mecanismos que tiene como misión el permitir al conductor girar las ruedas delanteras según la voluntad, de forma que el vehículo tome la trayectoria deseada, haciendo así al vehículo virar en las curvas, evitar colisiones con otros vehículos y hacer maniobras en general.
Las principales características en el diseño de los mecanismos y elementos que integran la dirección del automóvil son lograr una reversibilidad controlada, es decir permitir al conductor la suficiente sensibilidad sobre la carretera, como para proporcionar un control efectivo del vehículo, sin que las irregularidades del terreno puedan repercutir negativamente en la fiabilidad de la dirección o en el confort de la conducción, además se debe buscar un mecanismo lo suficientemente suave como para permitir su accionamiento en maniobras a baja velocidad (como estacionar el vehículo), y a la vez, lo suficientemente robusta para asegurar una estabilidad aceptable en la trayectoria del vehículo en velocidades medias y altas.
Una dirección debe ser suave, es decir, permitir una buena maniobrabilidad sin necesidad de realizar grandes esfuerzos sobre el volante. Una forma de lograr esto es mediante un adecuado sistema desmultiplicador o bien mediante un mecanismo de servoasistencia.
De lo suave que resulte la dirección, dependerá que tan precisa sea al momento de ir por la trayectoria deseada, una dirección muy suave provocará perdida de precisión debido a que el volante se mueve ligeramente de un sentido a otro, provocando movimiento del vehículo de un lado a otro del camino, por otro lado, si la dirección fuera excesivamente dura, la conducción resultaría fatigosa e imprecisa.
Algunas causas que pueden provocar imprecisión en la dirección son:
• Excesivo juego en los órganos de la dirección
• El alabeo o abolladura de las llantas de las ruedas
• El desbalanceo de las ruedas y el zigzagueo que de él se deriva y que se transmite hasta el volante.
• La inadecuada presión de inflado de las llantas, que si no es la misma en las dos ruedas directrices provocará que el vehículo tienda a irse hacia una de los lados.
La estabilidad es la característica básica de la dirección y se consigue como conjunción de todas las características anteriores y resulta fundamental para garantizar la seguridad de la conducción. Ésta depende también de los factores como la fiabilidad en el diseño del mecanismo, el proceso de fabricación, la calidad de los materiales empleados y un entrenamiento general adecuado en el manejo de un auto.
2.2 Geometría de la Dirección.
La dirección debe cumplir con cierta geometría para poder funcionar adecuadamente, esto no es otra cosa a que la posición relativa que tienen que cumplir los elementos que componen la dirección (elementos de mando, ruedas y suspensión), para determinar la posición de las ruedas en movimiento sobre el terreno y que influyen de forma determinante sobre el comportamiento dinámico del vehículo.
La geometría tiene que ver más que nada con los virajes, pues en cada uno, las llantas giran un ángulo diferente una de la otra, debido a que cada llanta tiene distinto radio de curvatura. Si la orientación de ambas ruedas fuera la misma en todo momento, cada una de ellas giraría con respecto a un centro de rotación distinto, lo que supondría que una de las ruedas sería arrastrada por la otra, puesto que las ruedas, al virar con centros de giro distintos, tenderían a variar la distancia entre ellas; dado que esto no se puede permitir debido a la rigidez de los mecanismos de tracción y dirección, se encontrará con que una de las ruedas (si no es que las dos) sufrirá un deslizamiento lateral que (además de suponer una mayor dificultad en el accionamiento y ajuste de la dirección) provocaría un desgaste inaceptable en el neumático acortando su vida de forma drástica.
Fig. 2.1 Geometría de las ruedas delanteras. [2.1]
Las ruedas traseras siguen la trayectoria curva, gracias al diferencial que permite dar a la rueda exterior, mayor número de vueltas que a la interior, pero como estas ruedas no son orientables y para seguir su trayectoria debe abrirse mas la rueda exterior, resulta de ello un cierto resbalamiento en curva, imposible de corregir, que origina una ligera pérdida de adherencia. La figura 2.2 muestra claramente la circunferencia descrita por las llantas delanteras de un automóvil.
Fig. 2.2 Trayectoria de ruedas delanteras durante un viraje de 360°
La rueda interior describe una circunferencia menor
La rueda exterior describe una circunferencia mayor
2.3 Cinemática de la Dirección.
Los primeros vehículos basaban su sistema de dirección en un eje delantero rígido que giraba de forma solidaria con las ruedas como respuesta al giro del volante por parte del conductor. La figura 2.3 muestra una dirección de eje rígido y una de eje partido. Nótese como en a) y b), las ruedas directrices describen el radio de giro adecuado, mientras que para el sistema de eje partido se tiene que hacer el arreglo de los brazos de dirección describan ángulos diferentes y a su vez tengan el mismo punto de radio de giro.
a) b) c)
Fig. 2.3 Sistema de dirección; a) rueda única, b)eje rígido, c) Eje partido.
Uno de los inconvenientes de la dirección de eje rígido, es que resultaba inestable porque cualquier irregularidad en el terreno influía en forma importante en la dirección, además es necesario un mayor esfuerzo para hacer girar el eje de las llantas, por lo que se requerían desmultiplicaciones junto con volantes de grandes dimensiones, para vehículos de un peso mayor (como los actuales).
Otros inconvenientes para este tipo de dirección era que el radio de giro resultaba excesivamente amplio, debido a que el eje delantero sólo podía ser girado hasta cierto punto, consecuentemente, la suspensión delantera para un vehículo de esos resulta muy compleja .
2.3.1 Sistema Ackerman.
Para evitar tener que girar todo el eje delantero, se optó por hacer girar las dos ruedas sobre puntos de pivotamiento distintos. El sistema de Ackerman reducía en gran medida el valor de par que era preciso aplicar a la tirantería de la dirección al reducirse de forma notable el valor del radio de pivotamiento de las ruedas. Esto permitía reducir en gran medida, el grado de desmultiplicación en el mecanismo de la dirección, y como consecuencia, aumentar la capacidad de maniobrabilidad de los vehículos.
El sistema de Ackerman evitaba todos los inconvenientes vistos para el eje rígido, pero involucraba un nuevo problema, al girar un mismo ángulo las dos ruedas directrices, las trayectorias recorridas por ambas no eran paralelas y, por lo tanto, las ruedas deslizaban en las curvas. La figura 2.4 muestra la geometría Ackerman.
Fig. 2.4 Sistema de dirección basado en geometría Ackerman [2.2]
Dirección de barras paralelas
Brazo de dirección
Barra de enlace
Brazo Pitman Brazo esclavo
Barra de enlace
Brazo de dirección Barra central
Para evitar el deslizamiento, y con el fin de que las ruedas recorran trayectorias paralelas concéntricas, es preciso disponer de un mecanismo que permita girar las dos ruedas delanteras según dos ángulos progresivamente diferentes. Aunque no existe ningún mecanismo simple que cumpla con esta condición geométrica de forma exacta, Jeantaud construyó en Francia en 1878 un mecanismo que satisface en forma bastante precisa a esta condición, para un intervalo de valores de ángulos girados por las ruedas comprendido entre 25° y 27°, para valores de ángulos menores las desviaciones en los valores son de un 2% aproximadamente, mientras que para ángulos mayores las desviaciones crecen en forma considerable. Jeantaud encontró que el viaje correcto se conseguía con bastante aproximación cuando la orientación de los brazos de la dirección era tal que sus prolongaciones se cortaban en la mitad del eje trasero. Estas desviaciones se ven también modificadas, en parte por el hecho de que las ruedas no se encuentran en un plano vertical y suelen presentar una ligera convergencia.
El sistema de Jeantaud se ha impuesto actualmente como solución cinemática de los sistemas de dirección de la práctica totalidad de los vehículos automóviles.
En un vehículo de dos ejes, de los cuales uno es director (Fig. 2.5 a), el dispositivo de mando de las ruedas debe ser tal que, si el conductor impone un ángulo de orientación o de viraje α a una de las ruedas, la otra rueda debe virar un ángulo β para que las perpendiculares a las trayectorias de las dos ruedas se corten en un punto l situado sobre la prolongación del eje no director.
Para obtener gráficamente los ángulos de orientación teóricos exactos, es suficiente construir un rectángulo (Fig. 2.5 b) cuya base sea la distancia 2a entre los ejes de giro o pivotes y como altura la distancia entre ejes e, para traer luego la recta DE que une el centro de la base A B con un vértice inferior del rectángulo. Las rectas que unen los puntos A y B con un punto F cualquiera de DE determinan dos ángulos de orientación correctos α y β para un viraje a la derecha.
La condición geométrica que debe cumplirse para conseguir ese efecto se traduce a:
e a
2 cot
cotβ− α = 2.1 [2.1]
a) b) c)
Fig. 2.5 Sistema de dirección de ejes directrices a) ángulos de orientación teóricos exactos b) y c) relación teórica que debe existir entre la distancia entre los ejes de giro o pivotes, la distancia entre ejes
y los ángulos de orientación de las dos ruedas. [1]
2.3.2 Relación entre los Elementos del Trapecio de Jeantaud.
La solución dada por Jeantaud sólo permite obtener un resultado satisfactorio para todos los ángulos de orientación, a condición de que la longitud R de las palancas de acoplamiento y el ángulo γ que forman estas palancas con el eje, sean adecuadamente elegidos (Fig. 2.5 c).
Para conocer la longitud R que corresponde a un ángulo γ, es suficiente construir un rectángulo ABCD (Fig. 2.5 c) cuya base sea la distancia 2a entre los ejes de giro o pivotes, y como altura la distancia entre ejes e, para trazar luego, a partir de un vértice A por ejemplo, una recta que forme un ángulo γ con la base AB, por lo tanto, la longitud R de la palanca de acoplamiento correspondiente al ángulo γ es igual a :
R = 2
HE
![Fig. 2.31 Tipos de amortiguamiento presentes en una suspensión. [2.5]](https://thumb-us.123doks.com/thumbv2/123dok_es/4976858.75997/79.612.198.480.310.577/fig-tipos-amortiguamiento-presentes-suspension.webp)
![Fig. 2.34. Partes de un amortiguador a) cilindro doble, b) mono-tubo. [2.7]](https://thumb-us.123doks.com/thumbv2/123dok_es/4976858.75997/83.612.98.533.93.371/fig-partes-amortiguador-cilindro-doble-b-mono-tubo.webp)