I
NSTITUTO
P
OLITÉCNICO
N
ACIONAL
E
SCUELAS
UPERIOR DEI
NGENIERÍAM
ECÁNICA YE
LÉCTRICAU
NIDADZACATENCO
Ó
RTESIS
ACTIVA
PARA
LA
REHABILITACIÓN
DE
LESIÓN
MEDULAR
DE
MIEMBRO
INFERIOR
PROYECTO TERMINAL
Q
UE PARAO
BTENER ELT
ÍTULO DEDIRIGIDA POR:
Dr. CHRISTOPHER RENÉ TORRES SAN MIGUEL Dr. RAFAEL RODRÍGUEZ MARTINEZ
P R E S E N T A N:
SERGIO CORTÉS RAMÍREZ ADRIÁN DUARTE MONDRAGÓN
MÉXICO,D.F.AGOSTO DEL 2013
INGENIERO EN
UNIDAD PROFESIONAL "ADOLFO LÓPEZ MATEOS"
TEMA
DE TESIS
QUE PARA OBTENER EL TITULO DE INGENIERO EN CONTROL Y AUTOMATIZACION POR LA OPCIÓN DE TITU LACIÓN PROYECTO DE INVESTIGACIÓN SIP20120564 DEBERA(N) DESARROLLAR
C. SERGIO CORTÉS RAMÍREZ C. ADRIÁN DUARTE MONDRAGÓN
"ÓRTESIS ACTIVA PARA LA REHABILITACIÓN DE LESIÓN MEDULAR DE MIEMBRO INFERIOR"
DISEÑAR UN EXOESQUELETO PARA EL CONTROL DE LOS MOVIMIENTOS DEL MIEMBRO INFERIOR, QUE MEDIANTE ACTUADORES Y DISPOSITIVOS ELECTRÓNICOS DIVERSOS, REGISTREN PARÁMETROS DE POSICIÓN Y DESPLAZAMIENTO PARA PROPORCIONAR MOVIMIENTOS DE FLEXIÓN Y EXTENSIÓN AL TOBILLO
Y RODILLA, CON LA FINALIDAD DE ESTABLECER UN PROTOCOLO DE REHABILITACIÓN PARA LA MARCHA
HUMANA.
};> ANTECEDENTES GENERALES DE LAS ÓRTESIS y EXOESQUELETOS. };> BIOMECÁNICA DEL MIEMBRO INFERIOR.
};> DISPOSITIVOS DE ADQUISICIÓN DE DATOS. };> MECÁNICA. ELECTRÓNICA Y CONTROL. };> PRESUPUESTO.
};> ANÁLISIS DE RESULTADOS, CONCLUSIONES Y TRABAJOS A FUTURO.
MÉXICO D. F., A 01 DE AGOSTO DE 2013.
ASESORES
GUEZ MARTÍNEZ DR. CHRISTOPHER RENÉ TORRES SAN MIGUEL
DRA.
~ÁN~lTA
r>.r<TTr>...,.JEFA fiEL DEPARTAMENTO .n.'-'.n. ...
INGENIERÍA EN CONTROL YzyxwvutsrqponmlkjihgfedcbaZYXWVUTSRQPONMLKJIHGFEDCBA
¡ P N
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ÓRTESIS ACTIVA PARA REHABILITACION
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. i
Contenido
Índice General i
Índice de Figuras iii
Índice de Tablas v
Resumen vi
Abstract vi
Objetivo General vii
Objetivos Específicos vii
Justificación viii
Capítulo I. Antecedentes generales de las Órtesis y Exoesqueletos
I.1 Reseña histórica de la rehabilitación 2
I.2 Órtesis y Exoesqueletos 3
I.2.1 Órtesis Pasivas 3
I.2.2 Órtesis Activas 4
I.3 Lesión medular 6
I.3.1 Datos estadísticos 6
I.3.2 Tratamiento de lesión medular 7
I.4 Estado del arte 7
I.5 Planteamiento del problema 22
Capítulo II. Biomecánica del Miembro Inferior
II.1 Biomecánica 24
II.2 Consideraciones anatómicas 24
II.2.1 Anatomía de la cadera 24
II.2.2 Anatomía de la rodilla 25
II.2.3 Anatomía del tobillo 26
II.2.4 Anatomía del pie 27
II.3 Análisis de la biomecánica de la marcha 28
II.3.1 El ciclo de la marcha 31
II.3.2 Parámetros de la marcha 33
II.3.3 El centro de gravedad durante la marcha 33
II.3.4 Determinantes de la marcha 33
II.3.5 Fases de la marcha 34
II.3.5.1 Fase de apoyo 34
II.3.5.2 Contacto o apoyo del talón 35
II.3.5.3 Posición media 35
II.3.5.4 Propulsión o despegue digital 36
II.3.5.5 Fase de balanceo 36
II.3.6 Comportamiento del miembro inferior en la marcha 37
II.3.6.1 Contacto inicial 38
II.3.6.2 Respuesta a la carga 38
II.3.6.3 Apoyo medio 38
II.3.6.4 Apoyo final 38
II.3.6.5 Pre balanceo 39
II.3.6.6 Balanceo inicial 39
II.3.6.7 Segundo balanceo 39
II.4 Sumario 40
Capítulo III. Análisis de la cinemática de la marcha
III.1 Metodología 42
III.2 Análisis de las fuerzas actuantes en la marcha 42
III.3 Análisis cinemático del desplazamiento de las articulaciones 47
III.3.1 Representación de Denavit – Hartenberg 47
III.3.2 Metodología de los parámetros de D-H 50
III.4 Dispositivo y pruebas de marcha 55
III.4.1 Circuito electrónico para dispositivo 55
III.4.2 Desarrollo del programa 56
III.4.3 Desarrollo de cinturones para medir los ángulos del miembro inferior 58
III.4.4 Resultados obtenidos 59
III.5 Sumario 60
Capítulo IV. Diseño y control de la órtesis de rehabilitación
IV.1 Arquitectura para el control de la órtesis 62
IV.1.1 Servo motor 62
IV.1.2 Controlador del motor 64
IV.1.3 Material del prototipo 65
IV.2 Diseño físico de la órtesis 65
IV.3 Análisis estructural de la órtesis de miembro inferior 70 IV.4 Sumario 70
Capítulo V. Costos
V.1 Presupuesto 82
V.2 Mano de obra 82
Capítulo VI. Análisis de resultados, conclusiones y trabajos a futuro
VI.1 Resultados 84
VI.2 Conclusiones 84
VI.3 Trabajos futuros 85
Referencias 86
Glosario 91
Anexos 93
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ÓRTESIS ACTIVA PARA REHABILITACION
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. iii
Índice de Figuras
Figura I.1 Masaje egipcio 2
Figura I.2 Masaje Ayur-Veda tradicional 2
Figura I.3 Órtesis pasiva 4
Figura I.4 Órtesis activa 5
Figura I.5 Estructura mecánica del exoesqueleto BLEEX 7
Figura I.6 Prototipo final 8
Figura I.7 Representación del mecanismo 9
Figura I.8 Dispositivo de rehabilitación motora 10
Figura I.9 Diagrama de cuerpo libre de fuerza sobre las piernas 11
Figura I.10 Ejemplos de exoesqueletos de ayuda para cargas 11
Figura I.11 Modelo esquemático del sistema 12
Figura I.12 Versión final del WOTAS 12
Figura I.13 Diseño estructural de la órtesis 13
Figura I.14 Modelo con dos grados de libertad 14
Figura I.15 Estructura final del exoesqueleto 15
Figura I.16 Grafica de los movimientos en la interfaz 15
Figura I.17 Brazo humano con siete grados de libertad 16
Figura I.18 Prototipo del exoesqueleto 16
Figura I.19 Prototipo del exoesqueleto 17
Figura I.20 Prototipo final del exoesqueleto para apoyar la rodilla 18
Figura I.21 Etapas de bloqueo y actuación en un ciclo de marcha 19
Figura I.22 Órtesis comercial sin modificar 19
Figura I.23 Prototipo del exoesqueleto 20
Figura II.1 Anatomía de la cadera 24
Figura II.2 Anatomía de la articulación de la cadera 25
Figura II.3 Anatomía de la rodilla 25
Figura II.4 Anatomía del tobillo 26
Figura II.5 Anatomía del pie 27
Figura II.6 Ejes y grados de libertad de la cadera 28
Figura II.7 Ejes y grados de libertad de la rodilla 29
Figura II.8 Movimientos del tobillo 30
Figura II.9 Alineaciones del miembro inferior 30
Figura II.10 El mecanismo “windlass” 31
Figura II.11 Esquema de las fases de la marcha 32
Figura II.12 Fase de apoyo 32
Figura II.13 Fase de balanceo u oscilación 32
Figura II.14 Fase de apoyo o contacto del talón 35
Figura II.15 Posición media 36
Figura II.16 Propulsión o despegue digital 36
Figura II.17 Fase de balanceo 37
Figura II.18 Fases del ciclo de la marcha 37
Figura III.1 Ciclo de la marcha 42
Figura III.2 Contacto inicial derecho 44
Figura III.3 Despegue antepie derecho 44
Figura III.5 Fase de oscilación izquierda 45
Figura III.6 Contacto inicial derecho 45
Figura III.7 Despegue antepie derecho 46
Figura III.8 Apoyo monopodal izquierdo 46
Figura III.9 Fase oscilación derecho 46
Figura III.10 Contacto inicial izquierdo 47
Figura III.11 Posición inicial 48
Figura III.12 Eslabones involucrados 48
Figura III.13 Articulaciones del sistema del miembro inferior 48
Figura III.14 Designación de los sistemas de coordenadas en cada articulación 50
Figura III.15 Circuito electrónico del dispositivo 55
Figura III.16 Diagrama de flujo del algoritmo 56
Figura III.17 Simulación del circuito electrónico mediante ISIS 57
Figura III.18 Datos enviados del microcontrolador al ordenador 58
Figura III.19 Cinturón con potenciómetro de precisión 58
Figura III.20 Evolución de los ángulos en cada articulación (Prueba 1) 59
Figura III.21 Evolución de los ángulos en cada articulación (Prueba 2) 59
Figura IV.1 Servo motor 62
Figura IV.2 Arquitectura Dinamyxel RX-64 63
Figura IV.3 Controlador Dinamyxel 64
Figura IV.4 Ejemplo de conexión 64
Figura IV.5 Material en polvo ABS 65
Figura IV.6 Prototipo de órtesis 66
Figura IV.7 Plano sección superior derecha 67
Figura IV.8 Plano sección media derecha 67
Figura IV.9 Plano sección inferior derecha 68
Figura IV.10 Plano sección superior izquierda 68
Figura IV.11 Plano sección media izquierda 69
Figura IV.12 Plano sección inferior izquierda 69
Figura IV.13 Plano general de la órtesis de miembro inferior 70
Figura IV.14 Aplicación de fuerzas y presiones sobre órtesis con sujeción superior 73
Figura IV.15 Flexión de material de órtesis con sujeción superior 73
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ÓRTESIS ACTIVA PARA REHABILITACION
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. v
Índice de Tablas
Tabla I.1 Causas de lesión medular 6
Tabla I.2 Cronología trabajos existentes 21
Tabla III.1 Tabla de Denavit-Hartenberg 51
Tabla IV.1 Características del servo RX-64 64
Tabla IV.2 Tabla de las propiedades del material 71
Tabla IV.3 Propiedades mecánicas por elemento 71
Tabla IV.4 Sujeciones 74
Tabla IV.5 Fuerzas aplicadas a la órtesis 74
Tabla IV.6 Información de malla 74
Tabla IV.7 Información de fuerzas resultantes 75
Tabla IV.8 Resultado del estudio de tensiones con sujeción superior 76
Tabla IV.9 Resultado del estudio de desplazamiento con sujeción superior 76
Tabla IV.10 Resultado del estudio de deformaciones unitarias con sujeción superior 77
Tabla IV.11 Resultado del estudio de tensiones con sujeción inferior 77
Tabla IV.12 Resultado del estudio de desplazamiento con sujeción inferior 78
Resumen.
En el presente trabajo se muestra el diseño de un prototipo robótico para la rehabilitación del miembro inferior afectado por lesión medular. Este exoesqueleto tendrá la capacidad de aplicar fuerzas estáticas para la estabilización de la rodilla. Este diseño permite aplicar diferentes estrategias de control para la articulación de la rodilla en movimientos de flexo-extensión.
Por otra parte, se realizaron estudios para determinar parámetros esenciales de la marcha humana, siendo estos, la base de diseño y funcionamiento de la órtesis. Para la fuerza de interacción entre la órtesis y el miembro inferior, el dispositivo consta de actuadores eléctricos, y para la obtención de parámetros dinámicos como posición, velocidad y aceleración se utilizan sensores analógicos.
Abstract.
This thesis shown the design of a robotic prototype for the rehabilitation of lower limb affected by spinal cord injury. The exoskeleton will have the ability to apply statics forces to stabilize the knee. The design allows for different control strategies for the knee joint to get flexion and extension movements
The studies were conducted to determine the essential parameters of human gait, these being the base of design and operation of the orthesis. For the interaction force between the orthesis and the leg, the device consists of actuators, and to obtain dynamic parameters such as position, velocity and
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ÓRTESIS ACTIVA PARA REHABILITACION
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. vii
Objetivo General.
Diseñar una órtesis para el control de los movimientos del miembro inferior, que mediante actuadores y dispositivos electrónicos reproduzcan parámetros de posición y desplazamiento que proporcionen movimientos de flexión y extensión de rodilla, con la finalidad de establecer un protocolo de rehabilitación para la marcha humana causada por lesión medular.
Objetivos Específicos:
Seleccionar los materiales adecuados para la realización de la órtesis.
Seleccionar un actuador que cumpla con los requisitos de movimiento.
Diseñar un dispositivo que proporcione un diagnóstico de la marcha del ser humano.
Justificación.
Las piernas son extremidades indispensables para el ser humano, para poder trasladarse de un lugar a otro, realizar actividades deportivas, o simplemente para caminar, sin embargo es muy común que las personas estén expuestas a situaciones lamentables como accidentes automovilísticos, laborales o de cualquier índole.
CAPÍTULO
I
“A
NTECEDENTES GENERALES DE LAS
ORTESIS Y EXOESQUELETOS”
I.1 Reseña histórica de la rehabilitación
La historia de la fisioterapia, se remonta a las civilizaciones más antiguas, ya que utilizaban métodos y técnicas naturales de movimiento corporal, masajes y ejercicios para combatir enfermedades.
En Egipto (siglo XVII a. C.), se aplicaban masajes terapéuticos y estéticos, con fricciones tonificantes, aceites y ungüentos para embellecer, como se observa en la figura I.1, de hecho la cultura egipcia fue la responsable de extender esta práctica de tratamientos terapéuticos en las culturas griega, romana y persa. [16]
Figura I.1 Masaje egipcio. [16]
En la India y Tailandia antiguas, el masaje era importante para el tratamiento de las zonas dolorosas, de hecho el famoso masaje Ayur-Veda, figura I.2, creado por estas civilizaciones, aun es practicado en la actualidad, también fue manifestado con gran interés el realizar técnicas especiales para realizar ejercicios respiratorios y de circulación. [16]
Figura I.2 Masaje Ayur-Veda tradicional. [16]
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. 3
Así mismo a los luchadores y gladiadores se les recomendaba la maso terapia por fricción. Cecilio Aurelio introdujo la gimnasia acuática y la terapia con pesas y poleas. Aristóteles estudio la marcha humana, y realizo experiencias de tratamiento con descargas eléctricas de pez torpedo que se aplicaba en los ataques de gota, que posteriormente tuviera auge entre los romanos.
En América, los aztecas también practicaron tratamientos terapéuticos basados en el agua con baños de vapor llamados temazcalli, y los mayas con su baño de sudor llamado zumpulche, implementaron técnicas de tratamiento que perduran a la fecha y se le han agregado rituales.
En la época moderna se desarrollan los descubrimientos científicos en los laboratorios de las universidades ampliándose los conocimientos de anatomía, fisiología y de los medios físicos y técnicas de aplicación.
A mediados del siglo XX después de las guerras mundiales queda gran cantidad de enfermos lesionados, discapacitados, amputados, a los que se les programaban tratamientos de fisioterapia para su pronta recuperación y reincorporación al campo de batalla, algunos otros pacientes quedaron con invalidez, a los cuales se les mantenía con tratamientos a largo plazo.
A consecuencia de la revolución industrial, los accidentes laborales producen discapacidades y esto hace que se propongan tratamientos de fisioterapia para la recuperación e integración laboral. Después de una epidemia de poliomielitis entre 1942-1953, se les dio atención de fisioterapia a muchos niños afectados, quedando enfermos con discapacidades. [16]
I.2 Órtesis y Exoesqueletos
Un enfoque que actualmente es desarrollado para minimizar las limitaciones motrices es el uso de órtesis, definidas por la Organización Internacional de Estándares como un aparato usado para modificar las características funcionales o estructurales del sistema neuronal-muscular-esquelético, o como un dispositivo o aparato utilizado para soportar, alinear, prevenir, corregir deformidades o mejorar el movimiento de alguna parte del cuerpo.
Dicho de otra forma, una órtesis es la combinación e integración, entre las partes del cuerpo y una pieza de ingeniería, donde el resultado de esa integración es una unidad que obedece las leyes de la física y logra efectos o beneficios biomecánicos. [10]
I.2.1 Órtesis Pasivas
algunas de las articulaciones tenga movimiento, este es realizado sin utilizar ningún tipo de actuador. La órtesis pasiva de mayor uso es la de marcha recíproca, la cual aprovecha la extensión de la cadera derecha, para inducir la abducción de la cadera izquierda y viceversa.
Por lo general, este tipo de órtesis mantiene asegurada las articulaciones de rodilla, es decir, el seguro mecánico que mantiene fija la articulación de rodilla se libera manualmente solo para permitir que el usuario se siente o se reincorpore. Una órtesis pasiva de marcha consta de tres partes: armazón para piernas y cinturón pélvico, a partir de este esquema básico se pueden desarrollar algunas variantes, como se observa en la figura I.3, dependiendo de las necesidades del paciente y de la manera de abordar y resolver aspecto del diseño mecánico.
Dependiendo del diseño, se pueden clasificar en tres tipos:
La órtesis que no permite movimiento en ninguna de las articulaciones, con está, el individuo parapléjico desarrolla una locomoción con la ayuda de un par de muletas, este tipo de movimiento es denominado, locomoción con tres puntos de apoyo, en algunos casos es posible reemplazar las muletas por una andadera o un marco metálico.
La órtesis con movimiento de cadera, la locomoción también es realizada con la ayuda de muletas o andadera, la diferencia en la locomoción con este tipo de órtesis, es que la marcha puede ser desarrollada alternando los pies, es decir, el sujeto podrá mantener durante su traslación, tres puntos de apoyo, con esto se reduce en gran parte la carga de trabajo para la parte superior del cuerpo. Sin embargo, este tipo de órtesis no incluye flexión de la articulación de la rodilla.
La órtesis de balanceo reciproco de la cadera, este tipo de órtesis aprovecha la extensión de la cadera y da estabilidad a la parte superior del cuerpo mediante una conexión rígida entre la cadera y el torso, cabe mencionar que es la alternativa más usada por pacientes parapléjicos. [30]
Figura I.3 Órtesis pasiva.
I.2.2 Órtesis Activas
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. 5
humano que emula. El contacto entre el usuario y el exoesqueleto permite transferir potencia mecánica y señales de información.
Estos dispositivos son sistemas mecatrónicos que utilizan actuadores para proveer la fuerza y la movilidad de las articulaciones, por lo general son controlados por una unidad de procesamiento a la que se le conectan sensores y actuadores. [10]
Las órtesis activas, figura I.4, a diferencia de las pasivas, es que estas últimas, utilizan actuadores para la generación de los movimientos de las articulaciones, el uso de estás reduce la complejidad de la locomoción al imponer restricciones cinemáticas que habilitan en cierto grado un lazo de control cerrado, al aprovechar la información proveniente de los sensores, por otro lado la órtesis activa ayuda a reducir el costo metabólico, al permitir la flexión controlada de la rodilla en la fase de apoyo.
Por otro lado, en el proceso de la marcha artificial, los actuadores generan los movimientos de las articulaciones, aunque generalmente las articulaciones de tobillo quedan fijas o semifijas, en el diseño y fabricación de una órtesis activa el volumen y el peso son factores a considerar.
Para realizar el diseño, desarrollo e implementación del uso de las órtesis activas, se han empleado actuadores eléctricos, neumáticos, hidráulicos, así como, frenos magnéticos, dispositivos elásticos y resortes eléctricos.
El problema con los actuadores hidráulicos y neumáticos, es que a pesar de su capacidad de transmitir grandes energías a las partes móviles, tienen la desventaja del tamaño y uso de dispositivos periféricos asociados con su operación.
Por otro lado, los frenos magnéticos han mostrado patrones de marcha uniforme, reproducible y consistente, además de ser elementos limpios, silenciosos y de alta disponibilidad comercial. Fáciles de controlar y en el caso de los embragues no consumen energía cuando se encuentran en su fase pasiva.
Las características de dispositivos como este, permiten asegurar la articulación de la rodilla durante la fase de apoyo y permitir un libre desplazamiento durante la fase de oscilación, además un control electrónico que permite de manera relativamente simple ejecutar las flexiones en las magnitudes y tiempo que se determinen. [30]
I.3 Lesión medular
La lesión medular, es una conmoción o sección de la medula que produce una pérdida de la función neurológica por debajo de la lesión, el daño puede implicar la ausencia del control voluntario de los músculos esqueléticos, la perdida de sensación y la perdida de función autonómica. El alcance de tales perdidas depende del nivel de la lesión y de la cantidad de daño neural residual.
Es por ello que las consecuencias de la lesión medular afectan en todos los ámbitos de la vida del paciente, tanto física como psicológica y socialmente. Las secuelas físicas y neurológicas pueden alterar la movilidad voluntaria, el control de esfínteres, la sensibilidad, la respuesta sexual y el funcionamiento del sistema autonómico, según el nivel de la lesión.
Cabe mencionar que las variables psicosociales en juego, los cambios en el estilo de vida y su influencia en la dinámica familiar y social, que exigen al individuo grandes esfuerzos de afrontamiento y de adaptación a la nueva realidad. [19]
Al padecer de una lesión medular de miembro inferior, se abre la opción de atacar el problema con el uso de una prótesis, en este caso una órtesis activa con la cual es posible reducir el problema en parte o en su totalidad dependiendo del problema del usuario.
I.3.1 Datos estadísticos
Se calcula que la incidencia anual de lesión medular en México es de 18.1 por millón de habitantes y ocurre con más frecuencia en hombres en edad productiva, es decir, de 16 a 35 años de edad. Es probable que dichos datos estén subestimados, ya que no se registran los casos en los cuales la victima muere inmediatamente después de la lesión.
Se considera, además, que otras 20 víctimas por cada millón de habitantes, mueren antes de llegar al hospital y que el costo anual del tratamiento de los pacientes que no mueren de inmediato se aproxima a los 130 mil millones de pesos. [21]
El 82% de los pacientes con lesión medular es del sexo masculino y que la edad promedio de los lesionados es de 31 años. En la tabla I.1 se muestran los lesionados medulares por sexo. [22]
Tabla I.1 Causas de lesión medular.
Etiología Hombres Mujeres Accidente automovilístico 32.8% 40.9%
Accidente laboral 25% 4.5%
Caída de altura 25% 22.7%
Golpe/deportes 5.2% 4.5%
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. 7
I.3.2 Tratamiento de lesión medular
La atención de la lesión incluye tratamientos de soporte y estabilización espinal; si existe subluxación o dislocación se realiza una descompresión cerrada o abierta. Posteriormente, se requiere un procedimiento de descompresión o estabilización quirúrgica.
De manera adicional, a pesar de que su beneficio es controversial, casi todos los individuos reciben metilprednisolona como inflamatorio. Una vez superada la fase aguda, el tratamiento lo dictamina sobre todo el equipo de rehabilitación. [21]
I.4 Estado del arte
H. Kazerooni [1] de la Universidad de California, presenta el exoesqueleto hibrido Berkeley, el cual sirve de ayuda al humano para llevar cargas pesadas a una velocidad media de 1.3 m/s, ya que permite soportar una carga de hasta 75 kg., sin obstaculizar la marcha. Como se observa en la figura I.5, el prototipo está compuesto de una órtesis con un actuador, que cubre la pierna derecha, el actuador es capaz de realizar la flexión de la rodilla y la extensión, así mismo contiene un motor adicional en la articulación de la rodilla.
Además, consta de una columna vertebral rígida, que sirve como un punto de unión a la carga y un punto adjunto al exoesqueleto a través de un arnés compatible, la pierna consta de un segmento de forma análoga hasta el muslo, la rodilla y el pie en paralelo a los segmentos de la pierna.
La columna vertebral lleva una servo-válvula, controlada por un cilindró que se extiende por cada par de segmentos, para proporcionar un par activo de la cadera en flexión y abducción, y en la rodilla y tobillo de cada pierna. Para el control es usado un sensor y un micro controlador.
Por otro lado, Weinberg B. [2] del Centro de Ingeniería de la Universidad del Noreste, presentó una órtesis de rehabilitación activa de rodilla, diseñada para entrenar a los pacientes con ictus para corregir la hiperextensión de la rodilla durante la postura y con las piernas rígidas, figura I.6, la rodillera proporciona variables de amortiguación controlada de manera que se emule la recuperación motora de pacientes con accidente cerebrovascular.
Se utiliza un amortiguador de resistencia variable, para facilitar la flexión de la rodilla, durante el apoyo y proporciona resistencia a la rodilla durante el apoyo.
Por otra parte, la rodillera se apoya con la ayuda en el control de la rodilla durante el swing, es decir, para permitir a los pacientes conseguir una adecuada flexión de la rodilla para el descanso de los pies y extensión de la rodilla adecuada en preparación para el golpe de talón.
Figura I.6 Prototipo final.[2]
Evangelos Papadopoulos [3] del Departamento de Ingeniería de la Universidad Técnica de Atenas, muestra el mecanismo de cuatro barras para el movimiento de la escápula y en particular el movimiento del humero con respecto a la escápula, se utiliza una férula humeral plástica, esto permitirá la rotación del brazo lateral de 0° a 180°, la mayor parte del dispositivo es de resina epóxica esto para minimizar el peso.
Como el propósito es diseñar un mecanismo portátil, figura I.7, ligero, preciso y autónomo energéticamente, se registraron tres grupos de medidas, cada una en un plano diferente; de un plano paralelo a la espalda humana, seguido por un movimiento a 45°, y uno a 90°, todas estas fueron tomadas en una aducción completa de brazo.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. 9
Fue diseñado en un programa de cómputo el diseño mecánico, con el fin de examinar su fuerza y de poder realizar una selección de materiales para fabricar el prototipo, dentro de los cuales se probaron PVC, acero grado médico y acero de baja resistencia.
Figura I.7 Representación del mecanismo.[3]
Ricardo Gutiérrez [4] del Programa de Ingeniería Mecatrónica de la Universidad Militar Nueva Granada, en su diseño, figura I.8, muestra una estructura con forma de exoesqueleto que se sujeta al brazo del paciente permitiéndole a este realizar movimientos combinados gracias a los tres grados de libertad que posee el dispositivo de rehabilitación.
El dispositivo es controlado por una interfaz de usuario que permite enviar las órdenes de movimiento al exoesqueleto a partir del puerto de la computadora, por lo tanto el terapeuta puede modificar la terapia que debe realizar el paciente realizando las trayectorias con el exoesqueleto.
Mediante un análisis biomecánico, identificando los cinco grados de libertad del miembro superior: abducción y aducción del hombro, flexión y extensión del hombro, rotación interna y externa del humero, flexión y extensión del codo, pronación y supinación de la mano.
Figura I.8 Dispositivo de rehabilitación motora. [4]
Aaron M. Dollar [5]Miembro de la IEEE, realizó el análisis de algunas de las diferentes órtesis y exoesqueletos que se han realizado, además de un análisis de la marcha humana, de igual manera muestra la descripción de los planos anatómicos humanos, así como un modelo cinemático de la pierna humana en el plano sagital, el cual, es el plano dominante de movimiento durante la locomoción humana, en la figura I.9, se observa el diagrama de cuerpo libre de las fuerzas que actúan sobre las piernas.
Por otra parte, se han desarrollado exoesqueletos para personas sanas, esto para realizar tareas que no serían posibles con la pura fuerza o habilidades humanas, estos se muestran en la Figura I.10. El esquema de control del exoesqueleto BLEEX [1], trata de minimizar el uso de la información sensorial de la interacción humano/exoesqueleto, al igual que un robot bípedo el exoesqueleto puede equilibrarse por sí mismo, así que el usuario solo debe guiar el sistema durante la marcha.
Este sistema de control, utiliza 8 codificadores y 16 acelerómetros lineales para la determinación de la velocidad angular y la aceleración de cada una de las juntas de accionamiento de interruptor de pie, y el sensor de distribución de la carga para determinar el contacto con el suelo. Al usar este dispositivo los usuarios pueden soportar fácilmente cargas de 75 kg y caminar a una velocidad de 1.3 m/s.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. 11
Figura I.9 Diagrama de cuerpo libre de fuerza sobre las piernas.
a) b) c) Figura I.10 Ejemplos de exoesqueletos de ayuda para cargas. [1]
Jasón Edwin Molina [6]de la Universidad Tecnológica de Pereira, propone un dispositivo que amplifique la fuerza del sistema muscular humano, sin perder el control natural de los movimientos, y por tanto la variable a controlar en este dispositivo es la fuerza ejercida por la persona para no perder la naturalidad de los movimientos.
Para ello fue necesario un sistema cuya salida sea el torque y la entrada sea el voltaje de control para el actuador, con esto se obtuvo un modelo de espacio de estado, para realizar el algoritmo de control por realimentación, de modo que el sistema de lazo cerrado sea estable y responda de forma rápida a las señales de comando.
Se diseñó, un observador digital del estado para la obtención de control, este permite controlar no solo la salida sino también el estado del sistema. El uso de este exoesqueleto de amplificación de fuerza, básicamente realiza la tarea de dar ganancia al momento neto que ejerce el humano sobre alguna carga,
Figura I.11 Modelo esquemático del sistema. [6]
E. Rocon [7] Miembro del Comité Español de Automática, en su diseño nos habla del objetivo de proporcionar una plataforma de evaluación de estrategias de control para la cancelación del temblor patológico por medio de un exoesqueleto robótico, en este caso un exoesqueleto WOTAS (Órtesis Portátiles para la Evaluación de los Temblores y la Supresión), este exoesqueleto es capaz de aplicar fuerzas internas dinámicas.
La plataforma WOTAS, figura I.12, está diseñada para permitir diferentes estrategias de control, tanto para las articulaciones del codo como de la muñeca, y de esta forma poder tener movimientos de flexo-extensión del codo y flexo-extensión de la muñeca, por este motivo el exoesqueleto debe ajustarse con el fin de alinear sus articulaciones con los centros de rotación de las articulaciones del codo y muñeca.
El diseño de la articulación del codo es sencillo, ya que es similar al de la rodilla y se asemeja a una articulación de rotación, esta presenta un centro de rotación variable pero es fácilmente modelada con una simple articulación de rotación con centro de rotación fijo. Por otro lado, para la muñeca es más compleja ya que no cuenta con un eje de rotación determinado.
Figura I.12 Versión final del WOTAS. [7]
Marcela V. Urdaniz [8] de la Universidad de Entre Rios, realizó el diseño de una órtesis robótica para la rehabilitación de la marcha, el objetivo principal a cumplir es hacer una recuperación más rápida y positiva del paciente. Este prototipo, consta de seis grados de libertad y actúa sobre cadera, rodilla, tobillo y pie, se utiliza con un sistema de soporte del peso del paciente y una cinta de sujeción.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. 13
se efectúa sobre una cinta rodante, el diseño se dirige a personas cuya función motora está alterada, pero que aún conservan el control del tronco y músculos abdominales.
También, se toman criterios sobre el diseño como la capacidad para personas de peso máximo de 135 kg., y alturas de 1.50m a 2.00 m. Se cuenta, con parámetros biomecánicos para conocer el funcionamiento normal de la marcha humana, algunas variables biomecánicas consideradas son: ángulo, velocidad angular, momento angular y potencia de las articulaciones tanto de la cadera, rodilla y tobillo.
El diseño estructural, es adaptable para el uso del mayor número de usuarios posible, para esto la órtesis cuenta con segmentos laterales de longitud regulable, estos corresponden a las partes de muslo y pierna. El segmento de la pierna mide 60cm x10 cm y el del muslo 55cm x 10 cm.
Los rangos angulares de las articulaciones, definen los valores sobre los que trabajarán los actuadores, además se cuenta con topes mecánicos para evitar luxaciones.
Se cuenta con actuadores, para el diseño mecánico, con características adecuadas como el ser livianos, silenciosos, rápidos, de bajo consumo, robustos en cuanto a control, confiables y seguros.
Se actúa sobre tres grados de libertad: extensión-flexión de la cadera, extensión-flexión de la rodilla, y flexión plantar y dorsal en el tobillo, esto debido a que los pares más exigentes durante la marcha se encuentran en el plano sagital.
Para el control de la órtesis, se propone un controlador de posición en el espacio de las juntas, con referencia en trayectorias que se basan en el patrón de la marcha normal humana. Este sistema de control realimentado, obtiene las señales de realimentación y genera el movimiento del exoesqueleto a través de los motores eléctricos. En la figura I.13 se muestra el diseño estructural del prototipo.
Figura I.13 Diseño estructural de la órtesis. [8]
movimientos que genera una pierna sana, este sistema se enfoca en asistir los movimientos rotacionales de la cadera y rodilla, dentro del plano sagital.
El exoesqueleto incorpora, en su sistema de control la intencionalidad de movimiento de la persona, para lo cual se realizó una monitorización de la actividad bioeléctrica de los principales músculos a la acción deseada.
El diseño mecánico, se conforma por un análisis biomecánico de la marcha, de la antropometría humana, y del diseño del mecanismo de actuación. El diseño del sistema de control está dado por el sistema de adquisición y procesamiento de señales, y por los algoritmos y programas de computación de mando y monitoreo.
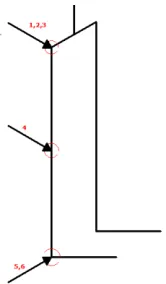
Para modelar el sistema de la pierna, como muestra la figura I.14, se asume como un sistema cinemático de dos eslabones y dos articulaciones rotacionales con pivote en la cadera.
También, fueron utilizados parámetros de longitudes y masas de los cuerpos en función de la altura y el peso total de la persona. Para imitar movimientos humanos, se definió el tipo de actuador y para ello se tomaron algunas características de los músculos humanos como: densidad de energía, velocidad de respuesta y porcentaje de recorrido.
Se utilizó un actuador con un elemento elástico, ya que se logran importantes ahorros de energía para el diseño del exoesqueleto. L estructura se construyó con aluminio por sus propiedades, además el exoesqueleto, figura I.15, consta de una estructura pasiva con sensores para grabar las trayectorias de una pierna, y de una estructura activa encargada de inducir dichos movimientos sobre la otra pierna con el uso de actuadores.
El programa de cómputo LEGXOS, consta de tres secciones: la primera es la encargada de la adquisición y digitalización de las señales. La segunda es una interfaz de usuario, la cual permite realizar cálculo de los ángulos, presentación de gráficas y animaciones y el control de los servomotores. La tercera consta de simulaciones y modelos 3D de los movimientos registrados, figura I.16.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. 15
Figura I.15 Estructura final del exoesqueleto. [9]
Figura I.16 Gráfica de los movimientos en la interfaz. [9]
D. Tibaduiza [10] de la Universidad Autónoma de Bucaramanga Colombia, diseñó un exoesqueleto formado por 15 sólidos geométricos simples, los cuales representan una parte del cuerpo. Se utilizan herramientas como el programa de computación screws, para tener un conocimiento físico del robot y de sus movimientos, en la figura I.17, se puede ver la descripción de los movimientos del brazo humano considerándose siete grados de libertad, tres en el hombro, dos en el codo y dos en la muñeca.
Para la obtener la cinemática se utilizaron además del cad screws, los parámetros de denavit-hartenberg, para tener un conocimiento físico del robot y de sus movimientos.
Figura I.17 Brazo humano con siete grados de libertad. [10]
Wang Shuang [11] de la Universidad de Beihang, diseño un exoesqueleto para la rehabilitación del dedo índice, en el cual se muestra un sistema de control cerrado que se utiliza para la realización del control de posición y compensación de los errores. Este dispositivo consta de 4 grados de libertad, un módulo de accionamiento y el modulo del exoesqueleto.
El exoesqueleto es accionado por motores de CC con un encoder como muestra la figura I.18, para reducir el peso que recae sobre la mano del paciente, el actuador se coloca lejos de la mano, el modulo del exoesqueleto se utiliza para transmitir fuerza y movimiento al exoesqueleto, un potenciómetro está instalado en el eje de articulación del exoesqueleto para medir el ángulo de rotación de la articulación PIP (articulación interfalángica proximal).
Para el modo de rehabilitación pasiva se incorpora un controlador de posición que permite la imposición de determinadas trayectorias, y para el control activo se incluye un controlador de fuerza que proporciona la retroalimentación de fuerza para el paciente.
Como se utilizan cables y vainas para la transmisión, y debido a su deformación elástica, el motor puede desviarse de la posición deseada y así llevar al error de la posición del motor, este error es compensado con el fin de controlar el movimiento con precisión.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. 17
Ju Wang [12] Miembro de la IEEE, diseñó un nuevo exoesqueleto, que puede realizar funciones de la siguiente manera:
1) La capacidad de actuación y control bidireccional en cada articulación.
2) Variedad de tamaños de punto a mano.
3) Variable de rango de movimiento (ROM).
4) La integración de sensores, para medir la fuerza ejercida en el dedo falange.
El exoesqueleto se monta en la parte de atrás de la mano, para no interferir con el movimiento de los dedos, se utilizan dos articulaciones prismáticas y una articulación de giro, la cual se adopta para constituir la articulación en paralelo, la transmisión por cable se utiliza para transmitir fuerza y movimiento.
El modulo actuador impulsa el sector bidireccional para realizar la flexión y extensión del dedo humano, el exoesqueleto se compone de cuatro módulos para el índice general, las bases de la distal y falange media por correas, los deslizadores de ranurado se pueden deslizar sobre la base de la falange media y el regulador se desliza sobre la falange distal.
El control deslizante, está relacionado con el sector rueda por medio de tornillos, y la rueda puede girar por las ranuras deslizantes, esto para que la rueda del sector se pueda traducir y girar al mismo tiempo con respecto a las bases de la falange distal y media falange. En la figura I.19 se observa el prototipo del exoesqueleto.
Figura I.19 Prototipo del exoesqueleto. [12]
Christian Fleischer [13] de la Universidad Tecnológica de Berlín, presenta un esquema de control y el algoritmo de una órtesis de potencia, se basa en la evaluación real de señales EMG, registradas en los músculos de las piernas del operador, el movimiento se ejecuta con un controlador de torque para un actuador eléctrico lineal.
Como se observa en la figura I.20, el exoesqueleto se compone de una órtesis que cubre la pierna derecha y un actuador conectado a ella, este actuador es capaz de realizar la flexión de la rodilla y de extensión y apoyo con un motor adicional en la articulación de la rodilla.
Figura I.20 Prototipo final del exoesqueleto para apoyar la rodilla. [13]
J. M. Font-Llagunes [14] de la Universidad Politécnica de Catalunya, presenta el diseño de una órtesis activa de rodilla y tobillo, para la asistencia en la marcha de lesionados medulares incompletos, por el limitado control sobre la musculatura del tren inferior con el que cuentan estas personas.
Con la realización de estudios se caracterizó el movimiento de las articulaciones de la pierna durante la marcha, al mismo tiempo se determinaron, las fuerzas y los momentos que involucran este movimiento, los ángulos y momentos que se registran en la rodilla durante un ciclo de marcha.
El movimiento de flexión al inicio de la fase, no se toma en cuenta, ya que los pacientes tienen control de músculos en la cadera que en parte influye sobre este movimiento de la rodilla. En la figura I.21, se muestra un ciclo de las fases de marcha.
El módulo del tobillo está basado en una órtesis pasiva comercial, figura I.22, al cual se le adapta un encoder en la articulación, la órtesis se constituye de dos barras de aluminio, las cuales harán de soportes y se ajustarán a la pierna con cinta velcro.
También, cuenta con un mecanismo de bloqueo, de tal forma que restringe el movimiento de flexión del pie, en esta modificación se instaló un encoder que monitoriza la variación del ángulo en la articulación, este encoder es de tipo óptico incremental, cuyo eje de rotación es incorporado al eje de la articulación, con esto se registra la rotación del pie con respecto a la pierna.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. 19
Figura I.21 Etapas de bloqueo y actuación en un ciclo de marcha. [14]
Figura I.22 Órtesis comercial sin modificar.[14]
Shuang Wang [15] Miembro de la IEEE, realizó un exoesqueleto portátil para la rehabilitación del dedo índice, propone un método de control que puede realizar tres tipos de rehabilitación del movimiento; el movimiento de control activo se realiza con el algoritmo de control de la fuerza durante la cual la resistencia es compensada en el espacio libre y es la fuerza virtual que realimenta al dedo en el espacio de restricción.
El movimiento pasivo se realiza mediante el controlador de posición dado el movimiento de la trayectoria deseada. El movimiento de rehabilitación asistida se lleva a cabo en las posiciones a medida por el cambio entre movimientos activo y pasivo.
El sistema se compone, de la mano exoesqueleto, integrado con sensores de ángulo y fuerza, el control (controlador y conductor), y la parte virtual. La figura I.23, muestra el dispositivo que consta de 4 grados de libertad, modulo del actuador, la transmisión por cable Bowden y el exoesqueleto.
Para cada articulación del dedo, dos cables los cuales se encuentran cada uno en una vaina, sirven para transmitir la fuerza y el movimiento del actuador al exoesqueleto. En cada eje de articulación del exoesqueleto, se encuentra integrado, un potenciómetro para medir el ángulo de rotación de la articulación del dedo.
Los sensores de fuerza, se instalan en la parte inferior del módulo distal del exoesqueleto para medir la fuerza ejercida por la yema de los dedos, las fuerzas en tres puntos de contacto se suman para obtener la fuerza resultante que es ejercida por el dedo.
En el modo de movimiento pasivo, el dedo es impulsado por el exoesqueleto de la mano, por lo tanto el control debe llevar el dispositivo a la posición deseada, teniendo en cuenta la seguridad y la estabilidad, el controlador PID se adopta de forma independiente para cada articulación controlada.
Para mantener la posición en el control de posición, el potenciómetro se utiliza para medir el ángulo de la articulación del dedo en el exoesqueleto como retroalimentación de posición en el circuito cerrado.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR. 21
A continuación se presenta una cronología, tabla I.2, de los trabajos ya mencionados, donde se observa entre otras cosas, el tipo de control con que fueron controlados.
Tabla I.2 Cronología trabajos existentes.
Año Artículo Control/Electrónica Instituto/Universidad 2006 Hybrid Control of the Berkeley Lower
Extremity Exoskeleton (BLEEX) PD Departament of Mechanical Engineering, University of California
2007 Design Control and Human Testing of an Active Knee Rehabilitation Orthotic Device
PI-torque PID-velocidad
IEEE
2007 Design of an Exoskeleton Mechanism for
the Shoulder Joint National Technical University of Athens
2007 Exoesqueleto Mecatrónico para
Rehabilitación Motora Control difuso HMI Facultad de Ingeniería, Universidad Militar Nueva Granada
2008 Lower Extremity Exoskeletons and Active
Orthoses: Challenges and State-of-the-Art Análisis IEEE
2008 Desarrollo de un Sistema de Control de un Exoesqueleto para Asistencia del movimiento del Codo
Control de torque por realimentación de
estado
Universidad Tecnológica de Pereira
2008 Diseño, Desarrollo y Validación de Dispositivo Robótico para la Supresión del temblor Patológico
Control de velocidad repetitivo
Comité Español de automática
2009 Diseño y Simulación de una Órtesis
Robótica para Rehabilitación de la Marcha Controlador de posición Facultad de Ingeniería, Universidad Nacional de Entre Ríos
2009 Diseño Conceptual de un Exoesqueleto para Asistir la Rehabilitación de Miembro Inferior
Amplificación de sensibilidad. Neurodifuso
IEEE
2009 Diseño de un Exoesqueleto Mecatrónico de Brazo basado en Screws y Robots Paralelos
HMI
Cadscrews Universidad Autónoma de Bucaramanga, Colombia
2009 Active and Passive Control of an Exoskeleton with Cable Transmission for Hand Rehabilitation
Control de posición y compensación de
errores
Robotics Institute, Beihang University
2009 Design of an Exoskeleton for Index Finger
Rehabilitation Control bidireccional y sensores IEEE
2009 Torque Control of an Exoskeletal Knee
With EMG Signals Control de torque Señales EMG Berlin University of Technology Germany
2010 Diseño de una Órtesis Activa para ayuda a la Marcha de Lesionados Medulares
Control de bloqueo Universidad Politécnica de Catalunya
2011 Multiple Rehabilitation Motion Control for
1.5 Planteamiento del Problema
La lesión medular es una alteración física que puede provocar una pérdida de sensibilidad y/o de movilidad. Puede ser causada por traumas debidos a accidentes de automóvil o roturas de disco intervertebral, o bien por algunas enfermedades como la poliomielitis, la espina bífida, los tumos primarios o metastásicos, la ataxia de Friedreich o la osteítis hipertrófica de la columna.
Los efectos de una lesión de médula espinal pueden ser de tipo completo, en la que se pierde la funcionalidad motora por debajo del nivel de la lesión, o incompleto, en que la persona puede tener alguna sensibilidad por debajo del nivel de la lesión. Las personas con este tipo de lesión pueden ser capaces de mover más un miembro que otro, pueden sentir partes del cuerpo que no pueden mover o quizás pueden tener más funcionalidad en unas partes del cuerpo que en otras.
Actualmente, en México hay aproximadamente 40 000 personas afectadas por este tipo de lesión, cada año unas 1 200 personas la padecen, la mayoría por causa de accidentes automovilísticos[22].
Con este proyecto, se establece un protocolo de rehabilitación que regule la marcha, se diseñará una órtesis activa que involucre fuerzas y movimiento para la rehabilitación de problemas de lesión medular.
Se implementarán las características primordiales de las órtesis activas, para regular el movimiento de las principales articulaciones afectadas por la lesión medular. Principalmente este trabajo se enfoca a la articulación de la rodilla, debido a que es la que presenta más irregularidades cuando se trata de lesiones medulares.
CAPÍTULO
II
“
BIOMECÁNICA DEL MIEMBRO
INFERIOR
”
II.1 Biomecánica
La biomecánica, estudia los efectos de las fuerzas mecánicas sobre los sistemas orgánicos de los seres vivos y sus estructuras, y de esta forma predice cambios por alteraciones y propone métodos de intervención artificial que mejoren el desempeño, cabe mencionar que las principales aplicaciones de la biomecánica están relacionadas con las áreas de medicina de rehabilitación ocupacional y deportiva.
II.2 Consideraciones anatómicas. II.2.1 Anatomía de la Cadera
La cadera está formada por dos huesos llamados iliacos o coxales, fuertemente soldados entre sí por delante y unidos hacia atrás por el sacro. También está rodeada de potentes músculos dotándola de una gran movilidad.
Las artrosis y las tendinitis son las enfermedades que se dan con mayor frecuencia. En la figura II.1 se muestran las principales partes de la cadera. [32]
Figura II.1 Anatomía de la cadera.
Se dice que el hueso iliaco es plano, y este articula con el sacro, el cual hace la función de cuña entre los dos iliacos. La unión de estos constituye el cinturón pélvico, donde están alojados órganos muy importantes para nuestras vidas.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR 25
Figura II.2 Anatomía de la articulación de la cadera.
II.2.2 Anatomía de la rodilla.
La rodilla es la articulación más grande del cuerpo humano y una de las más complejas. Sirve de unión entre el muslo y la pierna. Soporta la mayor parte del peso del cuerpo en posición de pie.
[image:35.612.215.394.83.212.2]Está compuesta por la acción conjunta de los huesos fémur, tibia, rótula y dos discos fibrocartilaginosos que son los meniscos. Fémur y tibia conforman el cuerpo principal de la articulación, mientras que la rótula actúa como una polea y sirve de inserción al tendón de los músculos cuádriceps y al tendón rotuliano cuya función es transmitir la fuerza generada cuando se contrae el cuádricep. En la figura II.3 se muestra la constitución de la rodilla. [33]
Figura II.3 Anatomía de la rodilla.
Es una articulación compuesta que está formada por dos articulaciones diferentes:
Articulación femorotibial. Es la más importante y pone en contacto las superficies de los cóndilos femorales con la tibia. Es una articulación bicondilea (con dos cóndilos).
Articulación femoropatelar. Está formada por la tróclea femoral y la parte posterior de la rótula. Es una diartrosis del género troclear.
El principal movimiento que realiza es de flexoextensión, aunque posee una pequeña capacidad de rotación cuando se encuentra en flexión. En los humanos es vulnerable a lesiones graves por traumatismos, muy frecuentemente ocurridos durante el desarrollo de actividades deportivas. También es habitual la existencia de osteoartrosis que puede ser muy incapacitante y precisar una intervención quirúrgica. [34]
II.2.3 Anatomía del tobillo.
La articulación del tobillo está formada por tres huesos: el peroné, la tibia y el astrágalo. Los dos primeros conforman una bóveda en la que encaja la cúpula del tercero. Permite, sobre todo, movimientos de giro hacia delante y hacia atrás, que son movimientos de flexo-extensión del pie.
En el sentido lateral, los topes del maléolo peroneo y maléolo tibial, que son los dos apéndices óseos que continúan peroné y tibia a ambos lados, impiden un movimiento completo de giro lateral aunque sí permiten una parte. [35] En la figura II.4 se muestran las partes del tobillo.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR 27
El astrágalo se apoya sobre el calcáneo formando una articulación bastante plana, sin gran movimiento. Esta articulación subastragalina es fuente de conflictos ya que soporta la transmisión de fuerzas del peso corporal y rige movimientos finos de estabilidad del pie. [36] Los ligamentos más importantes, ya que son los que le proporcionan estabilidad a la articulación, son:
Ligamento deltoideo: une el astrágalo y el calcáneo con la tibia y se encuentra al lado interno del tobillo.
Ligamentos laterales: son tres fascículos diferentes, que unen el astrágalo y el calcáneo con el peroné. Están en el lado externo.
Ligamentos de la sindesmosis: son los que mantienen la unión entre la tibia y el peroné.
II.2.4 Anatomía del pie
El pie contiene 26 huesos (28 si incluimos los dos huesos sesamoideos), que están divididos en tres secciones: pie delantero, pie medio y pie trasero. El pie delantero está compuesto por 5 metatarsos y 14 falanges. Los metatarsos forman un puente entre el pie medio y los dedos, y se extienden cuando el pie soporta peso. Cada uno de los huesos tiene una parte redondeada llamada cabeza metatarsal, que forman la planta del pie y soporta el peso del cuerpo.
Las falanges son los huesos de los dedos. El pie medio está compuesto por 5 de los 7 tarsos. Los tarsos del pie medio son el cuboides, el escafoides y 3 cuñas cuneiformes. En la Figura II.5 se puede observar cómo está constituido el pie humano. [34]
El pie trasero está compuesto por los otros dos tarsos: el calcáneo y el astrágalo. El astrágalo, o hueso del tobillo, está conectado con los dos huesos largos de la pierna inferior formando la articulación que permite al pie moverse hacia arriba y hacia abajo.
Una red de músculos, tendones y ligamentos mueven, soportan y mantienen en posición a los huesos del pie. Los músculos tienen varias funciones importantes. Mueven los pies, levantan los dedos, estabilizan los dedos en el suelo, controlan los movimientos del tobillo y soportan el arco.
Los tendones conectan los músculos con los huesos y las articulaciones. El más grande es el tendón de Aquiles, que se extiende desde el músculo de la pantorrilla hasta el talón y permite correr, saltar, subir escaleras y ponerse de puntillas. [33]
Los ligamentos mantienen los tendones en su lugar y estabilizan las articulaciones. El ligamento más largo del pie es la fascia plantar, que forma el arco entre el talón y los dedos y permite mantener el equilibrio y caminar. [34]
II.3 Análisis de la biomecánica de la marcha
Durante la marcha, el movimiento de la articulación coxofemoral, o cadera, es triaxial: la flexión-extensión tiene lugar alrededor de un eje medial lateral; la aducción-abducción tiene lugar sobre un eje anteroposterior; y las rotaciones interna y externa sobre un eje longitudinal.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
[image:39.612.279.349.73.231.2]DE LESIÓN MEDULAR DE MIEMBRO INFERIOR 29
Figura II.6 Ejes y grados de libertad de la cadera. [23]
En el caso de la rodilla, es posible encontrar tres grados de libertad de rotación angular durante la marcha, estos se muestran en la figura II.7. El movimiento principal es la flexión-extensión de la rodilla sobre un eje medial-lateral.
También pueden realizarse la rotación interna y externa de la rodilla y la aducción-abducción (varo-valgo), pero con menos consistencia y amplitud entre individuos sanos debido a restricciones del tejido blando y del hueso a estos movimientos. [20]
Figura II.7 Ejes y grados de libertad de la rodilla. [23]
El movimiento del tobillo está limitado por la morfología de la articulación tibioperonea-astragalina, que permite solo la flexión plantar (extensión) y la dorsiflexión (flexión).
[image:39.612.123.490.392.593.2]Los movimientos de las articulaciones del tobillo subastragalina, tarsiana, metatarsiana y falángicas contribuyen a una progresión uniforme del centro de gravedad a lo largo del espacio. Se producen constantes ajustes en estas articulaciones en respuesta a las características del terreno y a la actuación de los músculos que las cruzan, lo cual proporciona una interacción uniforme entre el cuerpo y la gran variedad de superficies que encontramos cuando caminamos como se muestra en la Figura II.8.
La pérdida de movimiento o función muscular normal en estas articulaciones tiene un efecto directo no solo en el pie o en el tobillo sino también en las restantes articulaciones de la extremidad inferior. [23]
a) b)
Figura II.8 Movimientos del tobillo. [23]
La pelvis y el tórax pueden ser considerados por separado o como una unidad rígida que comprende la cabeza, las extremidades superiores y el tronco (pelvis y tórax), o segmento CBT, como se muestra en la Figura II.9.
Los estudios existentes indican que los movimientos del hombro son principalmente los de flexión-extensión y de rotación interna y externa en las articulaciones glenohumerales. Se producen así mismo la flexión-extensión del codo y la pronación-supinación del antebrazo.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
[image:41.612.260.346.70.268.2]DE LESIÓN MEDULAR DE MIEMBRO INFERIOR 31
Figura II.9 Alineaciones del miembro inferior. [23]
Existe otro mecanismo fundamental del miembro inferior, cuyas funciones permiten al
individuo lograr una gran cantidad de movimientos. El Mecanismo “Windlass” es la acción
coordinada de las capas del músculo, el tendón, el ligamento y la arquitectura ósea, para mantener la altura del arco y la estabilidad (rigidez) del pie. Sin un funcionamiento
“Windlass” correcto, el pie no se comportaría como una palanca eficiente, y no se podría lograr la fuerza efectiva de propulsión o empuje. También existe evidencia en literatura científica que comprueba que un retraso o una ausencia del comienzo del mecanismo
[image:41.612.206.382.448.613.2]“windlass” pueden llegar a jugar un importante papel en la incidencia de algunas lesiones. En la figura II.10a se observa el mecanismo durante la fase de despegue de talón, y en la Figura II.10b se observa en la fase plantar. [39]
a)
b)
Figura II.10 El mecanismo “windlass”
II.3.1 El ciclo de la marcha
en el contacto inicial con una fase de apoyo y avanza hacia una fase de balanceo de la marcha hasta que el ciclo termina con el siguiente contacto inicial de la extremidad. [37]
La marcha consta de varias fases o momentos. Desde que comienza el apoyo del pie hasta que despega del suelo, oscila por el aire y vuelve a apoyar. El ciclo de marcha suele descomponerse en los siguientes momentos o fases:
a) Apoyo talón
b) Apoyo plantar
c) Despegue del talón
d) Despegue de los dedos
[image:42.612.120.473.316.533.2]En un momento de la marcha ambos pies apoyan en el suelo. El esquema es entonces el mostrado en la Figura II.11:
Figura II.11 Esquema de las fases de la marcha.
Del esquema anterior, se observa dos grandes fases dentro del ciclo de la marcha:
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR 33
Figura II.12 Fase de apoyo.
b) Fase de oscilación, en que el pie (la extremidad inferior entera se desplaza en el aire) oscila, y representa un 40% aproximadamente del ciclo total (Figura II.13).
Figura II.13 Fase de balanceo u oscilación.
Si se tiene en cuenta la duración de cada una de las fases se observa, que sumando los ciclos que se están produciendo de manera simultánea en ambos miembros inferiores en algún momento los pies se encuentran en contacto con el suelo. A este nuevo periodo se le denomina fase de doble apoyo. [37]
II.3.2 Parámetros de la Marcha
Los siguientes parámetros de la marcha son modificados de persona en persona por factores como la talla, la edad, patologías o trastornos locomotores entre otros.
Largo de paso: Es la distancia entre el evento de un pie y el evento del subsecuente otro pie. Por ejemplo, cuando ambos pies están en contacto con el suelo, el largo de paso derecho es la distancia entre el talón del pie izquierdo y el talón del pie derecho.
Zancada o largo de ciclo: Es la distancia entre el contacto inicial de un pie hasta el próximo contacto inicial del mismo pie.
Cadencia: Es el número de pasos en una unidad de tiempo (generalmente es el minuto). [38]
II.3.3 El Centro de gravedad durante la marcha
Se consigue un mínimo gasto de energía cuando el cuerpo se mueve en línea recta sin que el centro de gravedad se desvíe. En este sentido, cuanto mayor sea el desplazamiento del centro de gravedad, mayor será el gasto de energía, por lo que gran parte de la dinámica de la marcha se supedita a este concepto, que permite repetir el ciclo de la marcha durante largos periodos sin excesivo esfuerzo. [38]
Los desplazamientos del centro de gravedad durante la marcha son dos:
Desplazamiento vertical: Con un rango de movimiento alrededor de 5cm.
Desplazamiento horizontal: Con un rango aproximado de 5cm de movimiento también.
II.3.4 Determinantes de la Marcha
En la marcha, existe una serie de momentos determinantes que permiten realizar movimientos de manera fisiológica y que, tras sufrir determinadas alteraciones, generarán patrones patológicos de la marcha. [38]
Algunos de estos determinantes son:
Rotación pélvica: Durante la marcha, la pelvis realiza movimientos relevantes en, al menos, dos direcciones. Por un lado, el miembro inferior que se adelanta, no sólo lo hace a expensas de una flexión de cadera, sino también por el adelantamiento de la hemipelvis homolateral, que ayuda al avance de dicho miembro inferior. De la misma forma, el miembro inferior que se encuentra posterior, no sólo presenta una extensión de la cadera, sino también desplazamiento posterior de la misma hemipelvis. La suma de ambos movimientos es lo que conocemos como rotación pélvica.
Inclinación pélvica: La hemipelvis del lado en fase de balanceo, sufre una caída o descenso respecto a la hemipelvis contralateral. Esta caída debe encontrarse en unos patrones determinados, pues si fuese exagerada podría ser patológica.
Flexión de la rodilla durante la fase de apoyo: Se mantiene en una flexión de 10° a 20° y permite la minimización del desplazamiento del centro de gravedad en sentido vertical.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
ORTESIS ACTIVA PARA REHABILITACIÓN
DE LESIÓN MEDULAR DE MIEMBRO INFERIOR 35
De igual manera, cuanto mayor sea el ancho de la base de sustentación, mayor será el desplazamiento del centro de gravedad (mayor gasto energético) y por ende mayor estabilidad.
Rotación recíproca de la cintura escapular: La coordinación de cintura escapular y cintura pélvica durante la marcha se produce a través de una rotación alternante. Eso permite conservar energía potencial que facilite el siguiente paso.
II.3.5 Fases de la marcha
Es sumamente necesario analizar cada una de las fases en las que consiste la marcha, ya que será una buena herramienta para realizar un diseño óptimo de un robot bípedo. Gracias a estas fases se obtendrá un bosquejo de cada movimiento que deberá realizar el prototipo.
II.3.5.1 Fase de apoyo
La fase de apoyo o llamada también portante, abarca el 60 % de la zancada y consta de dos periodos de doble apoyo del miembro (inicial y final), cuando el pie contralateral está en contacto con el suelo, y de un periodo intermedio de apoyo unipodal, cuando el miembro contralateral está inmerso en la fase oscilante. La fase portante se puede descomponer en tres hitos o periodos. [20]
II.3.5.2 Contacto o apoyo del talón
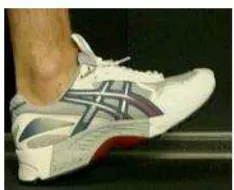
Contacto es la fase de amortiguación del ciclo de marcha. En este momento, la rodilla se flexiona antes que el pie golpee el suelo y éste prona o rota hacia adentro. Esto causa que el pie y la pierna funcionen juntos como un amortiguador de carro. El pie necesita estar con bastante movilidad en este momento para permitir cualquier desnivelación en el terreno (Figura II.14).

![Figura II.6 Ejes y grados de libertad de la cadera. [23]](https://thumb-us.123doks.com/thumbv2/123dok_es/4978714.76049/39.612.123.490.392.593/figura-ii-ejes-grados-libertad-cadera.webp)
![Figura II.10b se observa en la fase plantar. [39]](https://thumb-us.123doks.com/thumbv2/123dok_es/4978714.76049/41.612.206.382.448.613/figura-ii-b-se-observa-la-fase-plantar.webp)