“Implementación y Evaluación de un Sistema
Virtual de Medición de Ruido”
TESIS
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
PRESENTA:
LAURA SALVADOR VELAZQUEZ
ASESORES:
M. EN C. SERGIO GARCIA BERISTAIN
FIS. NUC. MIGUEL F. ROCHA BARAJAS
MEXICO D.F., SEPTIEMBRE DE 2009.
INSTITUTO POLITÉCNICO NACIONAL
I
Resumen
En el campo de la acústica, las investigaciones sobre ruido involucran mediciones que requieren el uso de equipo sofisticado, de alto costo económico y con un diseño y funcionalidad definidos por el fabricante. El uso de instrumentos virtuales se perfila como una solución al diseño rígido de los instrumentos tradicionales ya que es posible cambiar fácilmente la apariencia, funciones y parámetros mediante cambios en instrucciones programadas y sin las desventajas que implicaría el rediseño en un circuito físico. Actualmente es posible encontrar aplicaciones libres “online” que son capaces de determinar el espectro de frecuencia de señales de ruido y realizar mediciones de nivel de presión sonora, sin embargo, surge la pregunta sobre las condiciones y elementos influyentes en el adecuado desempeño de estas aplicaciones de instrumentación virtual. Con el objetivo de contestar esta cuestión, en esta investigación se realiza la modificación, estudio y evaluación, en plataforma Windows, de una de estas aplicaciones disponibles.
La aplicación, nombrada SLM_AC ( Sound Level Meter, con ponderación A y C), emplea la transformada rápida de Fourier para la determinación del espectro de frecuencia de una ventana de muestras, el tamaño de la ventana es elegido de acuerdo con el tipo de respuesta (fast, 8192 muestras y slow, 65536 muestras), después se aplica el filtro (función de transferencia) de ponderación en frecuencia y finalmente se realiza la estimación de la energía en el dominio de frecuencia mediante el teorema de Parseval para proceder a la obtención del nivel en dB de la señal.
II
! ! "
# " $ %" &
" ' ( " " (" ) * & !
+ ! *
*
"
, +
+
III
C
C
OONNTTEENNIIDDOOINTRODUCCIÓN ... 1
CAPÍTULO 1 ELEMENTOS BÁSICOS DE UN SISTEMA DE MEDICIÓN BASADO EN PC 3 1.1 ¿QUÉ ES UN SISTEMA DE MEDICIÓN? ... 4
1.2 FUNCIONES DEL SISTEMA ... 4
1.3 EL SISTEMA DE MEDICIÓN BASADO EN PC ... 5
1.4 ADQUISICIÓN DE LA SEÑAL ... 6
1.4.1 Sensores ... 6
1.4.2 Hardware de acondicionamiento de señal ... 7
1.4.3 Hardware de adquisición de datos: Tarjetas de adquisición ... 7
El Subsistema de Entrada Analógica ... 9
Configuración de los canales analógicos... 9
Digitalización o conversión analógica digital ... 9
Muestreo ... 9
Cuantificación... 12
Codificación ... 15
1.4.4 La computadora ...15
1.5 PROCESAMIENTO DE DATOS ...16
El software de instrumentación ...16
1.6 PRESENTACIÓN DE DATOS ...17
1.7 ESPECIFICACIONES DEL SISTEMA ...18
1.7.1 Características estáticas ...18
Curva de Calibración / Sensibilidad ... 18
Margen de medida / Alcance... 19
Exactitud y precisión ... 20
Repetitividad / Reproducibilidad ... 22
Resolución ... 23
1.7.2 Características dinámicas ...23
1.8 ERRORES DE MEDICIÓN ...24
1.9 CALIBRACIÓN ...25
Métodos de calibración ... 25
CAPÍTULO 2 EL SONIDO: ENTENDIENDO LA SEÑAL A MEDIR ...26
2.1 ¿QUÉ ES EL SONIDO? ...27
2.1.1 Características de las ondas sonoras ...27
2.1.2 Espectro de frecuencia ...28
2.1.3 Propagación del sonido ...28
2.1.4 Niveles Sonoros: El decibel ...30
2.2 RESPUESTA DEL SISTEMA AUDITIVO ...33
2.3. ¿QUÉ ES EL RUIDO? ...34
2.4 MIDIENDO EL RUIDO: EL SONÓMETRO ...35
2.4.1 Tipos de sonómetros ...35
2.4.2 Principio de Operación del Sonómetro ...35
Micrófono ... 36
Amplificador ... 37
Ponderación en frecuencia ... 37
Ecuaciones de los filtros de ponderación ... 39
Conversión a valor medio (RMS) ... 41
Ponderación temporal ... 41
Representación de la señal captada ... 42
2.5 ¿QUÉ MEDIR? DESCRIPTORES EN LA MEDICIÓN DE RUIDO ...42
IV
CAPÍTULO 3 DISEÑO E IMPLEMENTACIÓN DEL SONÓMETRO VIRTUAL ...44
3.1 DESCRIPCIÓN DEL SISTEMA DE MEDICIÓN ...45
3.2 LAS FUNCIONES DEL SISTEMA ...46
3.2.1 Adquisición de la señal ...46
La computadora ... 46
El sensor ... 47
La tarjeta de adquisición ... 47
Detalles de la adquisición de datos con MATLAB ... 49
3.2.2 Procesamiento de la señal ...52
Determinación del espectro de frecuencia ... 52
Filtros de ponderación ... 53
Cálculo del nivel sonoro en dB ... 55
3.2.3 Presentación de datos ...56
3.2.4 Detalles de Implementación ...57
CAPÍTULO 4 RESULTADOS EXPERIMENTALES ...59
4.1 CALIBRACIÓN ...60
4.2. SENSIBILIDAD ...62
4.3 MARGEN DE MEDIDA / ALCANCE ...64
4.4 EXACTITUD ...66
4.5 PRECISIÓN ...67
4.6 REPETITIVIDAD / REPRODUCIBILIDAD ...67
4.7 RESOLUCIÓN ...68
4.8 ERRORES EN EL PROCESAMIENTO DE LA SEÑAL ...69
4.9 ANÁLISIS DE COSTOS ...73
Costo Económico ...73
Costo Computacional ...73
CONCLUSIONES ...75
REFERENCIAS ...78
ANEXOS ...81
A. TEOREMA DE NYQUIST ...81
B. LA TRANSFORMADA DISCRETA DE FOURIER (DFT) ...81
C. LA TRANSFORMADA RÁPIDA DE FOURIER (FFT) ...83
D. ENVENTANADO ...83
E. TOLERANCIAS PARA CONDICIONES DE CAMPO LIBRE SEGÚN LA NOMRAAR59R1978 ...85
F. CÓDIGO SLM_AC ...86
1
El ruido actualmente representa un problema serio de contaminación en las grandes ciudades, en nuestra vida diaria, un día cotidiano al trabajo o la escuela está lleno del pitar de autos, de los motores del transporte colectivo y de carga, del sonido que produce un avión al pasar, de los gritos de los vendedores ambulantes anunciando su mercancía, de la música estridente en alguna tienda anunciando sus ofertas, del ruido emitido por la maquinaria en fábricas, en fin, tantos sonidos como puedan percibirse en medio de una comunidad específica, todos estos sonidos en conjunto constituyen lo que se denomina ruido ambiental. Estamos tan habituados a todos estos sonidos que solemos afirmar que nos hemos acostumbrado, que no nos importa o negamos la existencia del problema porque
“aún oímos bien”.
Y es que el ruido aparenta ser inofensivo, debido a que solo es posible percibirlo mediante el sentido del oído, y, ocasionalmente, en presencia de grandes niveles de presión sonora, por el tacto (vibraciones), mientras que otros agentes contaminantes son captados por varios sentidos, causando un nivel de molestia instantáneo, a diferencia del ruido, cuyos efectos son a largo plazo y acumulativos.
En general, los daños producidos por este agente contaminante pueden agruparse en: R Daños Fisiológicos. Entre los que se encuentran pérdida auditiva, hipertensión,
enfermedades cardiacas, ulceras, colitis, desórdenes endócrinos y bioquímicos, nausea, jaqueca y mareos.
R Daños Psicológicos. Tales como insomnio, irritación, miedo, estrés y dificultades de aprendizaje.
R Otros. Peligro de la seguridad (accidentes), interferencia en la comunicación, interferencia en el sueño, falta de concentración y también compromete la privacidad y el disfrute de actividades de ocio.
De aquí parte la preocupación por la medición y evaluación del ruido en una comunidad, de acuerdo con las regulaciones vigentes, y por la búsqueda de alternativas accesibles, en cuanto a aparatos de medición se refiere, para estudiantes y en general para cualquier persona interesada en el problema de ruido.
2
Un instrumento virtual es una aplicación software que simula los aspectos funcionales del instrumento real basándose en un dispositivo físico accesible para la computadora (tarjetas de adquisición de datos, instrumentos controlados vía IEEER488, instrumentos controlados vía RSR232 e instrumentos VXI). El entorno al que se debe enfrentar el usuario del sistema de instrumentación es una representación gráfica del instrumento homólogo físico, los indicadores y botones de control son virtuales.
En lo que se refiere al software de instrumentación, los programas especializados en este campo son LabVIEW, AgilentRVEE (antes HPRVEE), Cyber Tools, Beta Instruments Manager, LabWindows/CVI, HPVEE, MATLAB. Estos programas son capaces de soportar los 3 aspectos o funciones básicas de un sistema de instrumentación convencional:
1. Adquisición de datos 2. Análisis de señales
3. Presentación de datos o resultados
A lo largo de esta tesis se realiza el estudio de los aspectos necesarios para el diseño, implementación y evaluación de un medidor virtual de nivel de presión sonora con análisis de frecuencia en tiempo real.
En el Capítulo 1 se describen las funciones y elementos básicos de un sistema de medición basado en una computadora. Se revisan detalles de la adquisición de datos tales como el muestreo, cuantificación y codificación. También se repasan las características estáticas y dinámicas de los sistemas de medición así como el concepto y técnicas de calibración.
El Capítulo 2 presenta la teoría concerniente a las características, propagación y medición del sonido.
El capítulo 3 expone los elementos y consideraciones necesarias para el diseño e implementación del medidor virtual desarrollado en plataforma Windows con MATLAB como software de instrumentación.
1.1 ¿Qué es un sist
Se denomina sistema a necesarias para realizar una la asignación objetiva y emp evento, de tal forma que independiente del observado forma que exista una corresp las propiedades descritas.Un sistema de medición de un proceso físico o quím observador o a otro sistema sistema de medición.
Figura
1.2 Funciones del s
Las tres principales funci 1. Adquisición de la seconvertida en una s prestaciones del siste una señal eléctrica m adecuadamente. Con características que la nivel, espectro grand etapa de acondiciona
2. Procesamiento de da 3. Presentación de d
almacenado o transm Los elementos de un sis éstos comprenden la adquisi presentación de datos.
4
istema de medición?
ema a la combinación de dos o más elementos, sub r una o varias funciones. En los sistemas de medid y empírica de un número de propiedades o cualid que la describa. Es decir, el resultado de la ervador (objetiva), basada en la experimentación ( correspondencia entre las relaciones numéricas y la
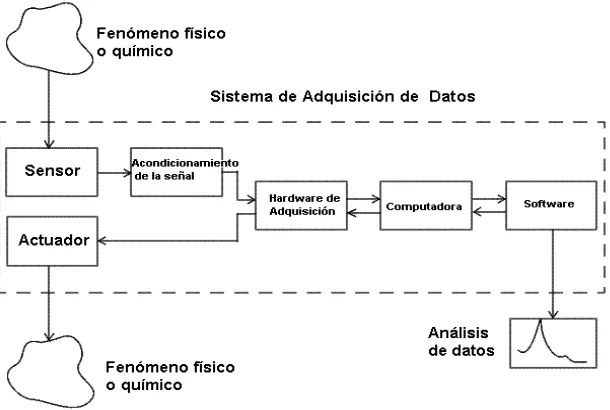
edición es aquel equipo cuya finalidad es obtener i químico y presentar dicha información en la for stema técnico de control. La figura 1R1 muestra de
igura 1=1 Diagrama general de un sistema de medición
l sistema
s funciones de un sistema de medición son:
e la señal. La información de las magnitudes físi una señal eléctrica. De esta etapa dependerán e l sistema de medida. La variable del mundo físico trica mediante un dispositivo sensor a fin de po
. Con frecuencia, la señal procedente del que la hacen poco adecuada para ser procesada: grande, falta de linealidad, etc. Estas funciones
ionamiento de la señal.
de datos. Procesamiento, selección y manipulació de datos. El valor medido puede ser visua ransmitido para su uso en otras aplicaciones.
un sistema de medición se presentan a continuació dquisición de la señal, el procesamiento de los da
s, subconjuntos y partes medida, esta función es cualidad de un objeto o e la medida debe ser: ción (empírica), y de tal as y las relaciones entre
tener información acerca la forma adecuada a un stra de forma general un
dición
es físicas es adquirida y erán en buena parte las físico es convertida en poder ser procesada sensor tiene unas sada: señal de pequeño ciones se realizan en la
ulación de los datos. visualizado solamente,
Fig
[image:11.595.153.458.441.646.2]1.3 El Sistema de m
Las funciones de adqu en detalle en los siguientes t sistemas de medición basado un sistema de instrumentació de adquisición de datos y a además de otros elementos actuadores (sistemas con conFigura 1
5
Figura 1=2 Funciones de un sistema de medición
e medición basado en PC
e adquisición, procesamiento y presentación de da entes temas de este capítulo. La descripción se enc basados en PC o de Instrumentación Virtual. La
entación virtual con los 3 componentes fundamen os y acondicionamiento de la señal, 2) computad entos esenciales en la adquisición de la señal com on control), y cables conectores.
=3 Diagrama de un sistema de medición basado en
de datos son explicadas se encuentra enfocada a La figura 1R3 muestra amentales: 1) hardware
putadora y 3) software, al como los sensores y
6
1.4 Adquisición de la señal
Antes de poner en marcha un sistema de adquisición de datos es necesario entender primero las cantidades físicas que se van a medir, las características de esas cantidades físicas o químicas, el sensor y el hardware apropiados para medir el fenómeno.
En un sistema basado en PC esta función se encuentra representada por el hardware
de adquisición de datos y acondicionamiento de la señal. Además, es necesario considerar otros elementos como sensores y cables de conexión.
1.4.1 Sensores
Un sensor es aquel elemento que permite transformar una variable física o forma de energía en una señal o variable eléctrica para facilitar su procesamiento. Así por ejemplo hay dispositivos que cambian su resistividad de acuerdo a una variable física como la temperatura o luminosidad. Otros dispositivos cambian sus propiedades de resistividad al momento de aplicarles un esfuerzo que produzca en ellos una deformación como en el caso de las galgas extensiométricas. Las variables eléctricas más comunes son la resistividad, capacitancia, inductancia o flujo magnético, y su variación se refleja en cambios de voltaje, corriente y resistencia.
La conversión de una cantidad física en una señal eléctrica es conocida como transducción.
Un transductor es un dispositivo que convierte una forma de energía a otra, un sensor convierte un parámetro físico a una salida eléctrica, la diferencia entre ambos términos es muy pequeña, ambos realizan una transducción. La diferencia recae en la eficiencia de la conversión de energía, el propósito de un sensor es detectar y medir sin importar si su eficiencia es del 5% o del 0.1%, en un transductor, cuyo propósito es la conversión de energía, la eficiencia es muy importante.
El actuador, también llamado transductor de salida o excitador, es el dispositivo opuesto al sensor, convierte una señal (usualmente eléctrica) en alguna acción, la mayoría de las veces mecánica.
Tipos de sensores
La clasificación de los sensores se hace convencionalmente de acuerdo con su principio de conversión, el tipo de variable física a medir, la tecnología usada o la aplicación. Existen varios criterios de clasificación, a continuación se muestran algunos de ellos:
1. Alimentación (tipo de excitación)
R Activos o generadores: Ellos mismos generan una tensión o corriente. No necesitan ninguna alimentación externa.
7
2. Magnitudes a medir
Este criterio de clasificación tiene en cuenta el tipo de información que el sensor es capaz de transformar, de acuerdo con esto se tienen 2 tipos de sensores:
Físicos R Detectan cambios en parámetros físicos: temperatura, fuerza, presión, nivel, posición, luminosidad, flujo, velocidad, aceleración, desplazamiento, humedad etc.
Químicos & Detectan cambios de pH, concentración, composición, etc.
3. Señal de salida
Digitales. Producen una señal de salida que es una representación digital de la señal de entrada, esta señal tiene valores discretos de magnitud medidos en tiempo discreto. Un sensor digital tiene niveles lógicos de salida que son compatibles con el receptor digital (p.e. TTL).
Analógicos. La señal de salida es analógica que es directamente proporcional a la señal de entrada y es continua en magnitud y tiempo.
El ancho de banda del sensor está determinado por el rango de frecuencias presentes en la señal medida. Para realizar una medición adecuada del fenómeno físico de interés es necesario elegir un sensor con ancho de banda compatible con el de la variable física.
Es importante recalcar que el término sensor debe ser diferenciado del de transductor: éste último convierte un tipo de energía en otra mientras que el sensor convierte un tipo de energía en eléctrica. Los transductores pueden formar parte de un sensor complejo, por ejemplo, un sensor químico puede contar de un transductor que convierta la energía de una reacción química en calor (termopila) y otro que convierta el calor en una señal eléctrica, la combinación de ambos transductores conforma un sensor químico.
1.4.2 Hardware de acondicionamiento de señal
El hardware de acondicionamiento de señal permite acondicionar la señal eléctrica proporcionada por el sensor, la etapa de acondicionamiento incluye la amplificación, aislamiento, filtrado, aislamiento eléctrico y multiplexaje de la señal además de la excitación del sensor como podría ser un micrófono electret o una galga extensiométrica. También permite definir el número de canales de adquisición disponibles.
1.4.3 Hardware de adquisición de datos: Tarjetas de adquisición
8
Se pueden encontrar 4 tipos de hardware utilizados en la instrumentación virtual: tarjetas de adquisición de datos, instrumentos controlados vía RSR232, instrumentos controlados vía IEEER488 e instrumentos VXI. Lo más común, es el uso de tarjetas de adquisición debido a las prestaciones que proporcionan los convertidores analógicosR digitales y los accesorios de acondicionamiento de la señal incluidos en las mismas, los instrumentos IEEER488 y VXI son utilizados en mediciones sofisticadas y los instrumentos controlados vía RSR232 normalmente se utilizan en sistemas más simples y para control de subsistemas remotos de adquisición de datos.
A lo largo de este trabajo se centrará la atención en las tarjetas de adquisición ya que es el tipo de hardware que mejor se adapta al desarrollo del diseño de un sonómetro, debido a que se conectan directamente al bus de la computadora y permiten la adquisición y el procesamiento de datos en tiempo real.
El hardware de adquisición se encuentra caracterizado por los subsistemas
(componentes hardware que realizan tareas específicas) que tenga. Aquellos sistemas que contienen múltiples subsistemas se denominan tarjetas multifunción. Los subsistemas más comunes son:
Subsistemas de Entrada Analógica = Referidos como subsistemas AI (Analog Input), convertidores A/D o ADC’s. Estos subsistemas convierten (digitalizan) las señales de entrada analógicas provenientes del sensor en bits que pueden ser leídos por la computadora. Es uno de los subsistemas más comunes con múltiples canales de adquisición con una resolución de 12 o 16 bits.
Subsistemas de Salida Analógica = Los datos digitales almacenados en la computadora son convertidos en una señal analógica. Estos subsistemas realizan la función inversa de los subsistemas de entrada analógica. También son referidos como subsistemas AO (Analog Output), convertidores D/A o DAC’s.
Subsistemas de Entrada/Salida Digital = Estos subsistemas (DIO, Digital Input/Output) están diseñados para recibir y enviar valores digitales (valores lógicos). Para la ejecución de operaciones complejas de Entrada/Salida digital es necesario contar con una tarjeta de adquisición de datos especializada, ya que de lo contrario la capacidad de la tarjeta estará limitada a operaciones sencillas.
9
El Subsistema de Entrada Analógica
La salida de los sensores generalmente es analógica, esta señal es digitalizada para facilitar su procesamiento operación realizada por el subsistema de entrada analógica.
La tarjeta de adquisición tiene que especificar el número de canales de entrada analógicos, la velocidad máxima de muestreo, la resolución, rangos dinámicos de entrada, ruido, no linealidades, precisión y todos los aspectos que puedan afectar la calidad de la señal digitalizada.
Configuración de los canales analógicos
El número de canales de entrada analógicos tiene que distinguir los que permiten entrada diferencial de los de entrada unipolar. Las entradas unipolares están referenciadas a una tierra común y se utilizan en el caso de trabajar con señales de alto nivel (amplitud superior a 1 V), que provienen de fuentes que se encuentran a poca distancia del centro de adquisición (aproximadamente a 5 metros) y que tienen la misma referencia. Cuando se trabaja con señales que no cumplen estos criterios es conveniente utilizar las entradas diferenciales. En este caso, cada entrada tiene su propia referencia y el posible ruido en modo común que se añade queda eliminado.
Digitalización o conversión analógica digital
La conversión A/D comprende tres pasos: muestreo, cuantificación y codificación.
Muestreo
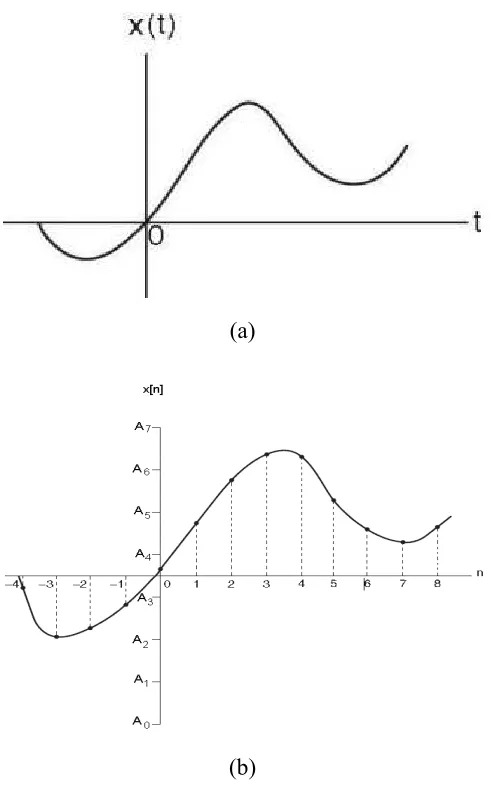
El muestreo consiste en tomar muestras de la amplitud de una señal continua x(t), figura 1R4 (a), con un intervalo de tiempo regular, por ejemplo cada segundo o cada 2 ms, la señal resultante x[n], como se muestra en la figura 1R4 (b), es discreta; la velocidad de muestreo se elige de acuerdo con el teorema de muestreo de Nyquist que establece que una señal debe ser muestreada al menos al doble de la componente en frecuencia más alta.
10 (a)
[image:16.595.189.434.99.504.2](b)
Figura 1=4 (a) Señal analógica, (b) Señal muestreada
En la mayoría de los ADC, el muestreo es realizado por un circuito de muestreo y retención (circuito S/H), este circuito consta de un buffer seguido de un interruptor electrónico conectado a un capacitor. El proceso de muestreo, ilustrado en la figura 1R5, consiste en los pasos siguientes:
1. En un instante determinado el interruptor conecta al buffer y al capacitor con un canal de entrada.
2. El capacitor se carga de acuerdo con la entrada de voltaje. 3. La carga es retenida hasta que el ADC digitaliza la señal.
4. Cuando se muestrean varios canales a la vez se repiten los pasos anteriores para cada canal.
11
Figura 1=5 Sistema de muestreo
Sistemas de multiplexado
El hardware puede ser clasificado en 2 categorías dependiendo de la forma de realizar el muestreo: muestreo continuo (scanning hardware), el cual muestrea las señales secuencialmente, y muestreo y retención simultáneos, que muestrea todas las señales al mismo tiempo.
Muestreo continuo
Se muestrea una señal, se convierte el valor obtenido en uno digital y se repite el proceso para cada canal usado. Los canales son muestreados secuencialmente tal como se muestra en la figura 1R6.
Figura 1=6 Muestreo continuo
La desventaja de este sistema surge cuando se están muestreando muchos canales, ya que no pueden ser muestreados al mismo tiempo existe un intervalo de tiempo entre las muestras de los diferentes canales que es llamado channel skew. La máxima tasa de muestreo por canal se ve afectada de acuerdo con la siguiente relación:
[image:17.595.146.480.475.607.2]Muestreo y retención s
Todos los canales se m diferencia de nanosegundos necesaria en el caso de aná porque son importantes las re
Cuantificación
Se define como el proc continua en una secuencia predeterminados de ampli
cuantificación.
Los niveles de decisión
de acuerdo con el nivel de d tomadas a un nivel permitid encima del nivel de decisió muestra se encuentra por cuantificación inferior más c
La cantidad de bits emp ADC. Las tarjetas de adquis de cuantificación está determ
Ni
Así, para un ADC de 16 valor máximo que se puede r representable es igual a 0. cuando el espacio entre nivel
W es llamada tamaño de
este caso se tiene un cuantifi
12
ón simultáneos
s se muestrean al mismo tiempo, como en la fig undos, cada canal tiene su circuito de muestreo de análisis de fase de señales analógicas en el d s las relaciones de tiempo de cada señal con las dem
Figura 1=7 Muestreo y retención simultáneos
el proceso de transformar una secuencia de entrad uencia con valores de amplitud finitos, se e amplitud a intervalos equidistantes denomina
isión están situados a la mitad entre los niveles el de decisión se realiza el ajuste de las magnitud ermitido: si el valor de la amplitud de la muestra decisión se ajusta hasta el siguiente nivel de cu por debajo del nivel de decisión, se ajusta h más cercano. Este procedimiento es ejemplificado its empleado para la cuantificar la señal determina dquisición normalmente emplean 12 y 16 bits, e determinado por el número de bits usados para la co
Niveles de cuantificación = 2Número de bits
de 16 bits el número de niveles de cuantifiación e uede representar es igual a 2Número de bits – 1 = 6553
a 0. La cuantificación puede estar espaciada uni e niveles de cuantificación es igual se tiene:
< = A1 – A0
o del escalón de cuantificación o resolución del antificador uniforme o lineal.
figura 1R7, con una uestreo. Esta opción es n el dominio temporal, las demás.
entrada x(t) de amplitud e establecen niveles ominados niveles de
eles de cuantificación, gnitudes de las muestras
uestra se encuentra por cuantificación, si la justa hasta el nivel de
icado en la figura 1R8. rmina la resolución del its, el número de niveles ra la conversión A/D.
ción es 216 = 65536, y el
5535, el valor mínimo da uniformemente o no,
13
Figura 1=8 Señal cuantificada con un ADC de 3 bits, la señal analógica es representada con 8 (23) niveles de cuantificación.
Ruido de cuantificación
14
Figura 1=9 Error de cuantificación
Rango de entrada
El rango de entrada del subsistema de entrada analógica es la diferencia entre el valor máximo y mínimo de la señal de entrada que el convertidor puede cuantificar. Es posible cambiar el rango de entrada seleccionando una ganancia diferente, muchas tarjetas incluyen un amplificador de ganancia programable que permite modificar la ganancia a través de
software. En general las tarjetas de adquisición especifican las características de entrada en términos de ganancia y voltaje de entrada.
Considérese dos ADC de 8 y 16 bits con un rango de entrada de ± 1 V. El rango de entrada, la resolución (W o tamaño del escalón de cuantificación) y la ganancia de la tarjeta de adquisición (G) determinan la variación de la señal más pequeña detectable, esta variación representa 1 LSB (least significant bit, bit menos significativo) del valor digital y se expresa como:
LSB ó ∆ = Rango de entrada / G B 2Número de Bits
∆ ADC de 8 bits = 2 / 1B28 = 7.812 mV
∆ ADC de 16 bits = 2 / 1B216 = 30.527 GV
Esto produce errores que pueden ser de hasta (±7.812mV)/2=3.906mV y (±30.517ZV)/2 = ±15.258 ZV.
15
resolución del convertidor de 3 bits a 8 o 16 bits, así, el número de intervalos pasaría de 8 a 256 o 65536. De esta forma es posible obtener una representación digital muy aproximada a la señal analógica ya que entre mayor sea el número de bits del ADC el error de cuantificación se reduce y la resolución aumenta.
Polaridad
Los subsistemas de entrada analógica pueden convertir señales unipolares y bipolares, es decir, señales con valores positivos solamente y señales con valores positivos y negativos, esta suele ser una característica del sensor así que debe configurarse el rango de entrada para que coincida con la polaridad requerida.
Codificación
Después de la cuantificación el siguiente paso es la codificación que consiste en la asignación de código binario (palabra código) a los niveles de cuantificación, si se tiene un ADC de 3 bits resulta en 8 niveles de cuantificación, se puede usar cualquier asignación de códigos, Tabla 1R1 a), existen muchos esquemas de asignación de códigos pero la mayoría de sistemas utilizan la representación con complemento a 2, Tabla 1R1 b), donde el bit más significativo indica el signo indica el signo del valor representado.
Nivel de cuantificación
Código binario
Nivel de cuantificación
Código binario Complemento a 2
A0 000 0.75 011
A1 001 0.5 010
A2 010 0.25 001
A3 011 0 000
A4 100 =0.25 111
A5 101 =0.5 110
A6 110 =0.75 101
A7 111 =1 100
(a) (b)
Tabla 1R1 Codificación con 3 bits
Otro elemento importante del hardware son los cables de conexión entre etapas del sistema, estos deben cumplir condiciones de compatibilidad que aseguren la transmisión de la señal sin degradarla. Los cables conectores con aislamiento garantizan mayor inmunidad al ruido permitiendo una conexión robusta mientras que los cables planos, de bajo costo, son menos robustos y más propensos al ruido.
1.4.4 La computadora
16
diferente la velocidad de adquisición de la señal y en general de todo el sistema. Aplicaciones que requieran procesamiento en tiempo real de señales de alta frecuencia necesitarán computadoras con procesadores más potentes.
La computadora provee un procesador, un reloj de sistema, un bus de transferencia de datos y una memoria y espacio en disco para almacenar datos. El procesador controla la rapidez de la conversión analógica digital. El reloj de sistema provee información de tiempo acerca de los datos adquiridos.
Los datos son transferidos desde el hardware al sistema de memoria por medio de acceso dinámico a la memoria (dynamic memory Access,DMA) o interrupciones.
1.5 Procesamiento de datos
Consiste en la selección y manipulación de los datos.
Con respecto a la instrumentación virtual, en esta etapa debe tenerse presente la arquitectura de la computadora así como las características del hardware de adquisición para escoger el sistema operativo y el software de instrumentación adecuados para el desarrollo del sistema.
El software de instrumentación
El software de instrumentación es el elemento que coordina a la computadora, el
hardware de adquisición y el de acondicionamiento de señales y los conjunta en un sistema completo de adquisición, análisis, procesamiento y visualización de datos. De aquí la importancia de observar las siguientes consideraciones al momento de elegir el software
para desarrollar una aplicación de instrumentación virtual:
R Compatibilidad con el hardware de adquisición y acondicionamiento. R Capacidad de los drivers para manejar un hardware determinado. R Sistema operativo sobre el cual va a correr la aplicación.
R Flexibilidad y potenciabilidad.
R Dificultad y complejidad en la programación.
Existen 3 opciones de programación del hardware de adquisición de datos:
a) Lenguaje ensamblador, se realiza programación directa de los registros, es una opción muy flexible desde el punto de vista del diseñador, pero es una opción de alto costo debido al tiempo requerido y al conocimiento necesario del sistema requerido para realizar tal programación.
b) Drivers, son programas que son usados por la computadora para comunicarse con el
hardware o dispositivos de entrada o salida. Entre las funciones que realizan están: R Envío y recepción de de datos en la tarjeta de adquisición.
R Integración del (interrupciones, R Integración del
la señal.
R Acceso a múltiple R Acceso a múltiple Aportan funcione programación con
c) Software de aplicaci
drivers, permite integ estándares GPIB (Ge
comunicaciones RS muestra en la figura MATLAB. Las funci R Reporte de inform
[image:23.595.165.451.402.604.2]como la tasa de m R Generación de ev R Administración d R Acondicionar una R Graficar los datos
Figura 1=10
1.6 Presentación d
En esta función el valo o indicador), almacenado en medida o de control.17
del hardware de adquisición con los recursos d nes, memoria).
hardware de adquisición con hardware de co
últiples subsistemas en una tarjeta de adquisición. últiples tarjetas de adquisición.
nciones de alto nivel que pueden ser usadas por ón convencionales (por ejemplo C, C++).
icación, añade alta capacidad de análisis y de integrar el control de instrumentos con los buses d
General Purpose Instrumentation Bus) y VXI s RSR232, el esquema básico para aplicaciones figura 1R10. Ejemplo de este tipo de software lo funciones básicas del software de aplicación son: información relevante, por ejemplo las condicion a de muestreo y el número de muestras obtenidas. de eventos.
ción de información almacenada en la memoria de ar una señal.
datos adquiridos.
10 Control de instrumentos mediante software de aplic
de datos
l valor medido puede ser presentado al usuario (m ado en un disco o chip de memoria o transmitido
rsos de la computadora
de condicionamiento de
ición.
as por los lenguajes de
y de presentación a los uses de instrumentación VXI y con el puerto de ciones de este tipo se lo son LabVIEW y son:
diciones de adquisición idas.
ria de la computadora.
e aplicación.
18
El software de instrumentación brinda una opción para el diseño del instrumento virtual mediante las GUI’s (Graphical User Interace, Interfaz Gráfica de usuario). Una interfaz gráfica es el vínculo entre el usuario y un programa computacional, se encuentra constituida por un conjunto controles o componentes que hacen posible la interacción del usuario, facilitando la entrada y salida de datos e información. Las interfaces gráficas tienen una gran importancia para usuarios inexpertos de cualquier programa ya que facilita su uso.
1.7 Especificaciones del sistema
Las principales especificaciones de cualquier sistema de medición se dividen en características estáticas y dinámicas, tal como se muestra en la tabla 1R2.
Características estáticas Características dinámicas Curva de calibración / Sensibilidad Respuesta temporal (Tiempo de respuesta)
Exactitud / Precisión /Error Constante de tiempo Margen de medida / Alcance Tiempo de establecimiento Repetitividad / Reproducibilidad Sobreoscilación
Linealidad Respuesta frecuencial
Resolución Ancho de banda
Histéresis Frecuencias de corte Distorsión armónica total Tabla 1R2 Características estáticas y dinámicas en un sistema de medición.
1.7.1 Características estáticas
Describen la actuación del sensor en régimen permanente o con cambios muy lentos de la variable a medir. A continuación se presenta un resumen de algunas de estas características que serán retomadas más adelante, en la evaluación del sistema de medición implementado.
Curva de Calibración / Sensibilidad
La curva de calibración de un sensor o de un sistema de medida es la línea que une los puntos obtenidos en el valor de salida del instrumento al aplicar sucesivos valores de la magnitud de entrada. Los valores de entrada deben determinarse con un sistema de medida de calidad superior al que se está calibrando.
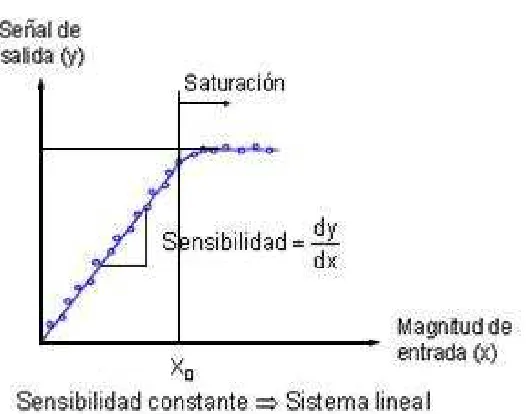
La sensibilidad (sensitivity) es la pendiente de la curva de calibración. En otras palabras es la variación en la salida del instrumento por unidad de variación de la variable del proceso (entrada).
19
Figura 1=11 Curva de Calibración
En la figura 1R11 se muestra una respuesta lineal para valores de la variable de entrada menores que X0. Para valores mayores que X0, la curva de calibración se hace menos sensible hasta que alcanza un valor límite para la señal de salida. Este comportamiento se conoce como saturación e indica que el empleo de instrumento para medir valores mayores a X0 no es adecuado.
Es normal que los puntos no estén localizados exactamente sobre la línea, por el contrario, se localizarán a cualquier lado de ella. La magnitud de las desviaciones de los puntos a la línea dibujada dependerá de la magnitud de los errores aleatorios de la medición.
Margen de medida / Alcance
Para definir la curva de calibración adecuadamente es necesario indicar su forma y sus límites. Estos últimos se especifican con algunos de los siguientes parámetros:
R Campo o margen de medida: También llamado rango, es el conjunto de valores comprendidos (20R120 dB) entre los límites superior e inferior entre los cuales es capaz de medir el instrumento con una exactitud definida.
R Alcance o fondo de escala (span, input full scale): es la diferencia (100 dB) entre los valores máximo y mínimo de la variable que se pueden medir de forma fiable. No confundir este término con el límite superior de medida, ya que solo coinciden si el límite inferior es cero.
20
[image:26.595.163.457.146.399.2]En la figura 1R12 se ilustran los conceptos de margen de medida y fondo de escala o alcance.
Figura 1=12 Rango y fondo de escala (span: xs – x1).
Exactitud y precisión
La exactitud es la cualidad que caracteriza la capacidad de un instrumento de medida de dar indicaciones que se aproximen al verdadero valor de la magnitud medida. Indica el máximo error que puede existir en la medición, de tal forma que en algunas ocasiones se utiliza, con el mismo significado, la frase incertidumbre de la medición.
Es posible definir la exactitud de un instrumento o dispositivo como el grado de concordancia, error o la diferencia entre el valor indicado y el verdadero valor de la magnitud medida. A este valor también se le denomina errorabsoluto.
Error absoluto= Valor medido – Verdadero valor
Sin embargo, lo más común es especificar el error como cociente entre el error absoluto y el verdadero valor de la magnitud medida, cociente que se denomina error relativo. Éste suele tener dos términos: uno dado como porcentaje (tanto por ciento) de la lectura, y otro constante, que puede estar especificado como porcentaje del fondo de escala o un umbral, o un número de "cuentas" en el caso de instrumentos digitales.
21
[image:27.595.176.447.214.484.2]La precisión o fidelidad es la cualidad que caracteriza la capacidad de un instrumento de medida de dar el mismo valor de la magnitud medida, al medir varias veces en unas mismas condiciones determinadas (ambientales, operador, etc.), prescindiendo de su concordancia o discrepancia con el valor real de dicha magnitud. La fidelidad implica que se tenga simultáneamente una conformidad en las sucesivas lecturas y un número alto de cifras significativas y es, por tanto, una condición necesaria pero no suficiente para la exactitud. La diferencia entre exactitud y precisión es mostrada en la figura 1R13.
Figura 1=13 Diferencia entre exactitud y precisión
Una indicación de la precisión de una medida es mediante el número de cifras significativas con las que se expresa un resultado. En el caso de un instrumento digital se habla de número de dígitos significativos.
En el caso del hardware de adquisición de datos, la exactitud frecuentemente se expresa como un porcentaje o una fracción del bit menos significativo (least significant bit, LSB). Bajo condiciones ideales, la exactitud de la placa es típicamente ± 0.5 LSB. De esta forma, un convertidor de 12 bits tiene tan solo 11 bits útiles.
22
estabilización está definido como el tiempo requerido por el amplificador de instrumentación para estabilizarse en una exactitud determinada.
El número de bits usados para representar una señal analógica determinan la precisión (resolución) del dispositivo. Mientras mayor sea el número de bits usados, la precisión de la medición será mayor. Un dispositivo con alta precisión y alta resolución divide el rango de entrada en muchas más divisiones permitiendo así un valor de voltaje detectable más pequeño. Asimismo, dispositivos con baja precisión y baja resolución dividen el rango de entrada en pocas divisiones disminuyendo así el valor mínimo de voltaje detectable.
La precisión total de un sistema de adquisición de datos es determinada por el convertidor A/D y está especificada por el número de bits usados para representar la señal analógica. La mayoría de tarjetas utilizan 12 o 16 bits. La precisión de la medición está dada por:
Precisión = Una parte en 2número de bits
La precisión en volts está dada por:
Precisión = Rango de voltaje /Ganancia B 2número de bits
Por ejemplo, si se usa un convertidor A/D de 16 bits configurado para un rango de voltaje de 5 volts, con una ganancia de 20 dB (10 veces) entonces:
Precisión = 5 volts / 10 B 216
Esto significa que el convertidor puede detectar diferencias de voltaje a un nivel de 7.629 ZV.
Repetitividad / Reproducibilidad
La repetitividad es el grado de concordancia entre los resultados de mediciones sucesivas de la misma variable, realizadas bajo las mismas condiciones de medida en un periodo corto de tiempo.
La reproducibilidad es el grado de concordancia entre los resultados de mediciones sucesivas de la misma variable, realizadas bajo diferentes condiciones de medida. Las medidas pueden realizarse a largo plazo, por personas distintas, con aparatos distintos o en distintos laboratorios.
Un detalle muy importante de esto es que se debe exigir que la medición se debe realizar con la variable en sentido creciente o decreciente pero no en ambos sentidos, pues en ese caso deja de ser repetitividad para ser HISTÉRESIS.
23
encuentra, con una probabilidad especificada, el valor absoluto de la diferencia entre dos resultados individuales obtenidos en las condiciones anteriores. Si no se dice lo contrario, la probabilidad que se toma es del 95%.
Repetitividad / Reproducibilidad = |Resultado Prueba1 –Resultado prueba 2|
Como otros parámetros de especificación de los instrumentos se acostumbra a especificar la repetitividad como un valor porcentual de la medición o bien del fondo de escala del instrumento.
Resolución
La resolución o discriminación es el incremento mínimo de la entrada capaz de producir un cambio medible en la salida. Cuando el incremento de la entrada se produce a partir de cero, se habla de umbral. Se expresa en general como un porcentaje del límite superior de medición del instrumento (valor a fondo de escala del mismo).
Para sensores con salida digital la resolución es el número de bits de la palabra de datos.
12 bits = 1 parte en 4096
4 ½ dígitos = 1 parte en 20000 cuentas (00000 a 19999)
En los sensores con formato de salida digital la resolución se expresa en bits. En los instrumentos con salida digital la resolución puede expresarse como dígitos o número de cuentas. Por ejemplo un multímetro de 4 ½ dígitos tiene una resolución de 1 parte en 20000 cuentas (00000 a 19999). La terminología ½ dígito significa que el dígito más significante puede tomar valores de 0 ó 1. Si la resolución fuera de 43/4 dígitos significaría que el dígito más significativo puede tener los valores 0, 1, 2 ó 3.
En la práctica, el factor último que limita la resolución es el ruido eléctrico.
1.7.2 Características dinámicas
Estas características son aquellas que se evalúan en comportamiento dinámico, es decir, en el comportamiento que el instrumento presenta cuando la magnitud medida varía a lo largo del tiempo o en estado transitorio. El tipo de entrada puede ser transitoria (impulso, escalón, rampa), periódica (senoidal) o aleatoria (ruido blanco). La elección de una u otra depende del tipo de sensor.
Respuesta temporal: Entre éstas se encuentra la constante de tiempo, el tiempo de establecimiento y la sobreoscilación.
24
1.8 Errores de medición
En un sistema de medición se espera realizar mediciones con el menor error posible, sin embargo, siempre existe un grado de incertidumbre puesto que es imposible realizar una medición sin modificar en mayor o en menor grado aquello que se mide. En cualquier sistema es posible encontrar 2 clasificaciones de error: sistemáticos y aleatorios.
Un error sistemático es aquel que en el curso de varias medidas de una magnitud de un determinado valor, hechas en las mismas condiciones, permanece constante en valor absoluto y signo ó varía de acuerdo con una ley definida cuando cambian las condiciones de medida. Este tipo de errores se pueden prever, calcular y eliminar mediante calibraciones y compensaciones.
La presencia de errores sistemáticos puede descubrirse midiendo la misma magnitud con dos aparatos distintos, o con dos métodos distintos, o dando las lecturas dos operarios distintos, o cambiando de forma ordenada las condiciones de medida y viendo su efecto en el resultado.
Para juzgar sobre la consistencia de los resultados obtenidos hay que recurrir a criterios estadísticos. Siempre existe el riesgo de que un error sistemático pase inadvertido, incluso en mediciones de alta calidad. El objetivo es reducir el riesgo de que haya errores grandes no detectados.
Los errores aleatorios, accidentales o fortuitos son aquellos cuyas causas son comunes o inherentes a las mediciones (aleatorias, debidas al azar o no asignables). Estos errores son inevitables, no pueden ser previstos, reducidos o eliminados.
Se manifiestan cuando se mide repetidamente la misma magnitud, con el mismo instrumento y el mismo método, y se presentan las situaciones siguientes:
R Los errores aleatorios positivos y negativos de igual valor absoluto tienen la misma probabilidad de producirse.
R Los errores aleatorios son tanto menos probables cuanto mayor sea su valor.
R Al aumentar el número de medidas, la media aritmética de los errores aleatorios de una muestra – conjunto de medidas – tiende a cero.
R Para un método de medida determinado, los errores aleatorios no exceden de cierto valor. Las medidas que lo superan deben repetirse y, en su caso, estudiarse por separado.
25
1.9 Calibración
La calibración consiste en la comparación de la exactitud de un instrumento con un patrón conocido.
Existen diversos factores, tales como el paso del tiempo, las condiciones medioambientales (temperatura, presión, humedad), que influyen en el aumento de la inexactitud e incertidumbre y posicionan al instrumento fuera de las especificaciones o tolerancias establecidas.
Mediante la calibración de un instrumento se determina la desviación de éste respecto del patrón. Es posible mejorar la exactitud, reduciendo la desviación y devolviendo el instrumento a las especificaciones definidas por el fabricante si se dispone de un sistema de ajuste. La calibración tiene ventajas como:
• Reducción de errores de medida • Aseguramiento de la medida • Repetitividad de las medidas • Transferencia de procesos • Intercambio de instrumentos
• Cumplir con los requerimientos establecidos en las normas ISOR9000.
Métodos de calibración
Calibración a un punto: se actúa sobre el sistema de medida de forma que para un punto concreto (por ejemplo el cero) la salida sea lo más exacta posible.
2.1 ¿Qué es el soni
El sonido se puede defi (gas, líquido ó sólido) produ pueden ser percibidas por el La onda producto de est desplazamiento de masa, un un estanque, si se observa el que el movimiento de la mism2.1.1 Características
Las ondas sonoras se a onda sonora, indicadas en la
Figu
Amplitud (A): Es la se equilibrio. La amplitud de o Cuanto más grande sea la am
Velocidad de propagac
valor depende de las propie [m/s].
Longitud de onda (λ)
completar un ciclo. Su unida
Periodo (T): Es el tiem completa. Se mide en segund
27
nido?
e definir como una perturbación que se propaga en produciendo variaciones de presión o vibraciones por el oído humano o bien por instrumentos diseñ e esta perturbación viaja transportando energ sa, un ejemplo de esto puede ser visto cuando se ar rva el movimiento de una hoja sobre la superficie la misma es perpendicular al desplazamiento de la o
as de las ondas sonoras
se asocian a un movimiento sinusoidal. Las car en la figura 2R1, se describen a continuación:
Figura 2=1 Características de una onda sonora.
separación de un punto del medio con respect d de onda informa sobre la magnitud de las varia
la amplitud, más fuerte será el sonido.
agación (C): Es la rapidez a la que se desplaz propiedades del medio elástico, se mide en metr
(λ): Es la distancia que una onda debe viajar unidad de medida es el metro [m].
el tiempo que tarda un punto del medio en repe segundos [s].
aga en un medio elástico ciones de partículas que s diseñados para ese fin. energía sin que haya o se arroja una piedra en rficie del agua se notará de la onda.
as características de una
especto a su posición de variaciones de presión.
esplazan las ondas, éste n metros sobre segundo
iajar en el tiempo para
28
Frecuencia (f): Es el número de variaciones de presión por segundo, se mide en Hertz [Hz] o en ciclos por segundo. El oído humano puede responder a frecuencias desde 20 hasta 20000 Hz. Esta propiedad del sonido se asocia con el tonoo altura.
2.1.2 Espectro de frecuencia
Un sonido de una sola frecuencia se denomina tono puro, sin embargo, la mayoría de los sonidos naturales son complejos y, según la teoría desarrollada por Charles Fourier, es posible descomponer una onda compleja en múltiples ondas senoidales de diferentes frecuencias, amplitudes y relaciones de tiempo (fases).
En general, dependiendo del contenido en frecuencia (señales de diferente frecuencia que componen una onda compleja), se tienen los siguientes tipos de sonidos:
− Sonido puro: Sonido constituido por una sola frecuencia.
− Sonido armónico: Sonido constituido por una frecuencia fundamental y unos
armónicos. Los armónicos son frecuencias que son múltiplos enteros de la frecuencia fundamental.
− Sonido aleatorio: Sonido constituido por varias frecuencias relacionadas de forma aleatoria y no necesariamente múltiplos de la frecuencia fundamental.
Para representar gráficamente un sonido se utiliza el espectro en frecuencia, el cual muestra la distribución de energía en las diferentes frecuencias que componen la señal. Este espectro es obtenido mediante la transformada de Fourier.
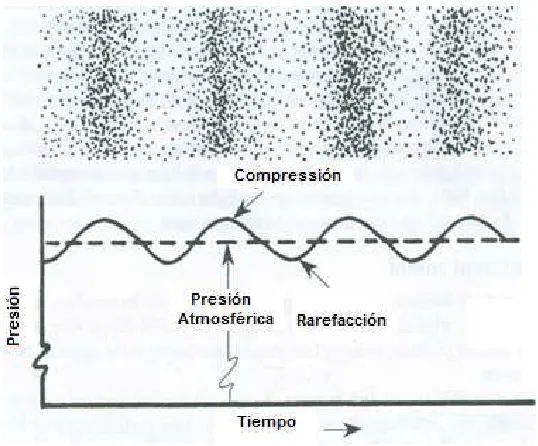
2.1.3 Propagación del sonido
29
Figura 2=2 Vista instantánea de las zonas de rarefacción y compresión en una onda de sonido en el aire, las regiones de compresión y rarefacción se encuentran ligeramente por encima y por debajo, respectivamente, del valor de la presión atmosférica.
Presión Sonora (P)
La presión atmosférica es la presión del aire ambiental en ausencia del sonido, es medida en Pascales [Pa] y se define como la fuerza de un Newton actuando sobre una superficie de 1 m2. De acuerdo con lo anterior, es posible definir la presión sonora como la diferencia entre la presión instantánea debida al sonido y la presión atmosférica. Como se mencionó anteriormente, la presión en las crestas y valles es mayor y menor respectivamente que la presión atmosférica, estas fluctuaciones de presión son muy pequeñas de tal forma que la presión mínima que el oído humano puede percibir es de 20ZPa (umbral de audición), esto es, 5000 millones de veces más pequeña que la presión atmosférica. La máxima presión soportada por el oído (umbral de dolor) sin experimentar un grave daño auditivo es de 20 Pa.
Potencia sonora (W)
Es la cantidad de energía sonora emitida por unidad de tiempo. Su valor depende sólo de la fuente sonora y no de su posición en el espacio. Se mide en Watts (W).
Intensidad sonora (I)
30 2.1.4 Niveles Sonoros: El decibel
Un cambio de un tono en una octava excita diferentes puntos de la corteza auditiva en posición lineal, esto quiere decir que si se tiene un tono de 250 Hz y se sube una octava (se duplica la frecuencia), el oído percibirá un cambio en la altura del sonido, similarmente, si un sonido de 1000 Hz se sube a 2000 Hz se notará un cambio en la altura de una octava; esta relación no es perfecta, sin embargo, es suficiente para asegurar que el oído tiene una respuesta logarítmica en frecuencia.
Un nivel se define como el logaritmo de una relación de 2 potencias. Cuando se calculan niveles de relaciones que no son potencias se deben observar las conversiones realizadas (intensidad, presión sonora, voltaje, corriente o cualquier otra unidad).
Nivel de Potencia Sonora
El nivel de potencia de W puede expresarse en términos de una potencia de referencia
Wref como sigue:
=
ref
W W
L log10 bels [B] (2.1)
Dado que el decibel, como su nombre lo dice, es 1/10 de bel (en honor de Alexander Graham Bell) el nivel en decibeles queda:
=
ref
W W
L 10log10 decibeles [dB] (2.2)
Donde:
W = Potencia medida en Watts
Wref = Potencia de referencia, usualmente 1 x10R12 W L= Nivel de potencia
La ecuación 2.2 se puede aplicar en forma similar para niveles de potencia sonora, eléctrica o cualquier otro tipo de potencia.
31 Parámetro = ref a a
L 10log10
= ref p a a L 20log10 Acústico
Potencia X
Intensidad X
Presión X
Eléctrico
Potencia X
Corriente X
Voltaje X
Tabla 2R1 Fórmulas usadas para la estimación de algunas magnitudes comunes
Nivel de Intensidad Sonora (NIS)
Se define mediante la expresión siguiente:
= = ref I I NIS
L log10 [dB] (2.3)
Donde:
I = Intensidad acústica en W/m2.
Iref= Intensidad acústica de referencia, establecida en 10R12 W/m2.
Nivel de Presión Sonora (NPS ó SPL)
El nivel de presión sonora (SPL, Sound Pressure Level) es usado para expresar el nivel de un sonido medido mediante un medidor de nivel sonoro. La presión sonora es lo que se mide en las evaluaciones de ruido, como el cuadrado de la presión sonora es proporcional a la potencia se puede denotar en decibeles, esto es:
c p m W I 2 2
2 = ρ
= (2.4)
Donde ρ0 es la densidad del medio de propagación y c es la velocidad del sonido (en el aire ρ0=1.21 y c= 340 m/s). Sustituyendo la ecuación 2.4 en la ecuación 2.3 se define el Nivel de Presión Sonora como:
=10log10 22
ref p
p p
=
p SP
L
Donde:
p = Presión acústica me
pref = Presión de r de audición.
En la figura 2R3 se mue nivel de presión sonora de l Los sonidos mayores a 120 además de ser bastante dolor El mínimo nivel de pre dinas/cm2), correspondientes
[image:38.595.231.391.346.594.2]audición. De la misma for máxima presión sonora sopo
Figura 2=3 Umbrales mín detectada por
El hecho de que la rela dolor) y la del sonido más evidencia la utilidad del man
32 = ref p p
SPL 20log10 [dB]
ica medida.
n de referencia de 2x10R5 N/m2, 20Z Pa, correspon
muestran los valores en intensidad y presión corr a de los sonidos audibles, los cuales van de los
120 dB pueden causar daños auditivos inmediat dolorosos para la mayoría de las personas.
de presión sonora detectable por el hombre es de ientes a 0 dB a una frecuencia de 1000Hz, se den
a forma está definido el umbral del dolor, cor a soportable por el oído humano, que es de 20 Pa.
mínimo y máximo de audición en intensidad presión. La da por el oído humano es de 20ZPa y corresponde a un nivel
la relación entre la presión sonora del sonido más i o más débil (umbral de audición) sea de alrede el manejo de una escala logarítmica.
120 dB
• Presión 20 Pa • Intensidad 1 w/m2
100 dB • P = 2 Pa, I = 10 R2w/m2
80 dB • P = 0.2 Pa, I = 10 R4w/m2
60 dB • P = 0.02 Pa, I = 1Z w/m 2
40 dB • P = 2m Pa, I = 10 R8w/m2
20 dB • P = 200 ZPa, I = 10 R10w/m2
0 dB
• Presión 20ZPa • Intensidad 10R12w/m2
(2.5)
rrespondientes al umbral
n correspondientes a los 0 dB a los 120 dB. mediatos e irreversibles,
es de 20 ZPa (0.000204 se denomina umbral de
, correspondiente a la
ón. La mínima presión nivel de 0dB.
33
2.2 Respuesta del sistema auditivo
La caracterización y valoración del impacto de las fuentes de sonido sobre el ser humano requiere considerar la sensibilidad del oído a los distintos tipos de sonido ya que ésta no es la misma para cada uno de ellos. La sensibilidad del oído depende de la frecuencia del sonido, es decir, la sensibilidad del oído es más elevada para las frecuencias medias y altas y mucho menor para las bajas. A este fenómeno se le denomina sonoridad, que es una medida subjetiva de la intensidad con la que un sonido es percibido por el oído humano, depende de la intensidad del sonido, de la frecuencia, amplitud y de otras variables, como pueden ser la sensibilidad del oído de quien escucha y de la duración del sonido.
[image:39.595.119.484.321.616.2]La figura 2R4 muestra las curvas de MunsonRFletcher, también llamadas curvas isofónicas, que representan los niveles sonoros a cada frecuencia, en el intervalo de 20 Hz a 15 KHz, para los que la percepción del sonido (sonoridad) es la misma.
34
El nivel de sonoridad se mide en fon, un fon se define como la sonoridad de un tono de 1000 Hz con un nivel de presión sonora determinado, por ejemplo, los sonidos con una sonoridad igual a la de un tono de 1000 Hz a 40 dB tienen una sonoridad de 40 fon, un sonido con sonoridad igual a la de un tono de 1000 Hz a 70 dB tiene un nivel de sonoridad de 70 fon.
Basándose en las curvas isofónicas se definen las redes de ponderación o filtros usados en instrumentos de medición de ruido.
A través de estos filtros se pretende convertir el espectro del sonido captado mediante un instrumento en uno ajustado a la percepción del oído humano, esto se logra atenuando las frecuencias bajas y amplificando las componentes de frecuencia a las que el oído es más sensible, de acuerdo con el contorno de las curvas de sonoridad.
Las curvas de sonoridad muestran como aunque el nivel de presión sonora de dos sonidos distintos sea el mismo, uno de ellos puede juzgarse como más alto que el otro si el nivel de presión sonora del primero está concentrado en una región de frecuencias donde el oído es más sensible.
Con el propósito de simular la respuesta del oído a diferentes frecuencias los equipos de medición de nivel sonoro incluyen varios filtros de compensación o ponderación señalados en normas internacionales.
2.3. ¿Qué es el Ruido?
El ruido es un tipo de contaminación muy común en el mundo actual, puede definirse como cualquier sonido que sea calificado por quien lo percibe como algo molesto, indeseado, inoportuno o desagradable. Así, lo que es un sonido agradable para una persona, puede ser calificado como ruido por otra. En un sentido más amplio, ruido es todo sonido percibido no deseado por el receptor.
35
2.4 Midiendo el ruido: El Sonómetro
Entre los instrumentos para la medición y evaluación de ambientes ruidosos se encuentra el Medidor de Nivel Sonoro o Sonómetro (SLM, Sound Level Meter), que es un instrumento para medir niveles de presión sonora.
Un sonómetro debe cumplir con las normas que establece la International Electrotechnical Commission (IEC, Comisión Internacional Electrotécnica) para los instrumentos de medición, también es posible la observancia de otras normas tanto internacionales como nacionales. Sin importar la norma a la que se ajuste el medidor de nivel sonoro, se asocia, invariablemente, con el Tipo o Clase de sonómetro.
2.4.1 Tipos de sonómetros
El estándar ANSI S1.4R1983, American Nacional Standard Specification for Sound Level Meters, establece 4 tipos de medidores:
Tipo 0: Tiene las tolerancias más estrictas (±0.7 dB entre 100 Hz y 4000 Hz). Se utiliza en laboratorios. Sirve como referencia.
Tipo 1: Se emplea en mediciones de precisión en el terreno. Con tolerancias de ± 1 dB entre 100 Hz y 4000 Hz.
Tipo 2: Medidor de propósito general, las tolerancias son las mínimas aceptables (± 1.5 dB entre 100 Hz y 1250 Hz, ±3 dB hasta 4000 Hz) para monitoreo de ruido, utilizado en mediciones generales de campo.
Tipo 3: empleado para realizar reconocimientos. Mediciones aproximadas.
El instrumento puede ser de clase 0, 1, 2, 3. El empleo de uno u otro tipo depende de la exactitud buscada en las mediciones y del uso que se requiera del instrumento.
Los instrumentos de medición que no cumplen al menos con las tolerancias del tipo 2 son consideradas inaceptables para la medición de NPS.
2.4.2 Principio de Operación del Sonómetro
De forma general, un medidor genérico del nivel de presión sonora consta de los siguientes bloques:
36
Un SLM mide los cambios en la presión acústica de forma sistemática y reproducible, las presiones son comprimidas logarítmicamente de tal forma que el rango de 1 a 1x106 se expresa como 0R120 dB, el proceso para realizar esto se ajusta a la descripción siguiente.
El sonómetro mide la presión sonora detectada mediante el micrófono, la señal eléctrica obtenida es muy pequeña, así que se amplifica para poderla procesar en la siguiente etapa, después la señal es enviada a través del circuito de ponderación el cual aplica una compensación en frecuencia de acuerdo con la aplicación (A, B, C, D o U) que se esté contemplando. El siguiente paso es la obtención del valor cuadrático medio de la señaly finalmente la visualización.
Micrófono
Es el elemento transductor, se encarga de transformar las variaciones de presión acústica en una señal eléctrica. Los micrófonos a usar varían dependiendo de la aplicación del instrumento, a continuación se presentan los 3 tipos más usados de acuerdo con el tipo de elemento transductor empleado.
Cerámicos o piezoeléctricos: Operan bajo el principio de los materiales piezoeléctricos, los cuales generan un voltaje de acuerdo a los cambios de presión. Estos micrófonos son de bajo costo, robustos y presentan poco ruido eléctrico aunque son sensibles a vibraciones. Debido a que su respuesta en frecuencia no es plana son usados en sonómetros Tipo 2.
Condensador: Presentan una respuesta en frecuencia plana (la misma sensibilidadR relación de transformación de presión acústica en tensión eléctrica) en todo el rango de frecuencias (20 a 20000 Hz). Los micrófonos de condensador son muy frágiles y requieren protección en ambientes hostiles y húmedos. Presentan una impedancia de salida muy elevada, es por esto que es necesario el uso de un preamplificador cuya principal función es adaptar la impedancia del micrófono a la impedancia habitual de entrada de un equipo de audio (aprox. 100R150 d). En general requieren alimentación (micrófonos de condensador de aire polarizado), que en la mayoría de los casos, es suministrada por el propio equipo de medida, el caso opuesto son los micrófonos de condensador permanentemente cargados o
electret, los cuales ya se encuentran prepolarizados y no necesitan alimentación.
Al introducir un micrófono dentro de un campo acústico, se produce una alteración de las características del campo debido a la difracción producida sobre el micrófono para frecuencias cuya longitud de onda es comparable al tamaño del mismo. De acuerdo con la respuesta en frecuencia se encuentran tres tipos posibles de micrófonos.