INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
“DETECCIÓN DE DEFECTOS MEDIANTE EL
USO DE REDES NEURONALES
ARTIFICIALES Y OPTIMIZACIÓN DE
RESULTADOS CON LÓGICA NEURO
DIFUSA”
T E S I S
QUE PARA OBTENER EL GRADO DE
:
DOCTOR EN CIENCIAS
CON LA ESPECIALIDAD EN
INGENIERÍA MECÁNICA
P R E S E N T A
ALEJANDRO LUNA AVILÉS
DIRECTOR:
DR. LUIS HÉCTOR HERNÁNDEZ GÓMEZ
INSTITUTO
POLITECNICO
NACIONA
L
SECRETARiA DE INVESTIGACION Y POSGRADO
E n la Ciu d a d d e M e x ic o, D. F. s ie n d o la s 12 : 0 0 h o r a s d e l d ia 2 4 de l m e s de N ov ie m b r e del 2 00 9 se r e u n ie r o n lo s m ie m b r o s d e la C o m is i6n R e vis o r a d e T e s is d e s ignada
p o r el Cole gio de P r o f e s o r e s d e E s t u d io s d e P o s g r a d o e In v e s t ig a c i6 n d e E. S. I. M. E.
p a ra e xa m in a r la t e s is d e t it u la d a:
"DETECCION DE DEFECTOS MEDIANTE EL
usa
DE REDES NEURONALESARTIFICIALES Y OPTIMIZACION DE RESULTADOS CON LOGICA NEURO DIFUSA". Pre s en t ad a p o r e l a lu m n o :
LUNA Ap ellido p aterno
AVILES
Apellido m a t erno
C on r e g ist r o:
DOCTOR EN CIENCIAS
D e s p u es d e in terca m b ia r o p in io n e s lo s m ie m bro s d e laC o m is i6 n m a n if e s t aro n SU APROBACION DE LA TESIS, e n vir t u d d e q u e s a tis f a c e lo s r e q u is it o s s e r ia la d o s p o r la s d is p o sic io n e s r e g la m e n t a rias
Agradecimientos.
AGRADECIMIENTOS.
Al Instituto Politécnico Nacional – Sección de Estudios de Posgrado e Investigación – Escuela Superior de Ingeniería Mecánica y Eléctrica.
Por abrirme sus puertas y confiar en mi trabajo como alumno de esta honorable institución.
Al Doctor Luis Héctor Hernández Gómez.
Por su apoyo, ayuda, amistad y confianza durante la realización de mis estudios y la elaboración del presente trabajo.
Al Consejo Nacional de Ciencia y Tecnología.
Por el apoyo brindado durante la realización de mis estudios.
A Ramiro Luna Martínez.
Mi Padre, por estar siempre conmigo, brindarme su apoyo incondicional, ayuda y consejo.
A Natividad Avilés Cerón.
Mi Madre, por sus cuidados, cariño y consejos.
A María del Rocío García Gómez.
Mi Esposa, por su ayuda, cariño, amor y paciencia en todo momento.
A mi familia.
Por ser un soporte fundamental.
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
i
RESUMEN.
Se plantea una metodología para la localización y clasificación de defectos a través de frecuencias naturales y análisis inversos con ayuda de las redes neuronales artificiales (RNA) y un programa de simulación numérica (ANSYS). Posteriormente, se desarrolla la optimización de los resultados obtenidos. Además, se establece la semejanza entre las redes neuronales biológicas y las artificiales, procurando resaltar los términos que son compartidos y sus significados. Se muestran algunas aplicaciones de las RNA en diferentes campos de la ciencia, aplicaciones industriales, detección de defectos a través de técnicas experimentales (no destructivas) y numéricas. Se establecen las bases matemáticas de las redes neuronales, con particular énfasis en las de retropropagación. Además, se muestran los teoremas y axiomas matemáticos de los sistemas difusos y posteriormente los neuro difusos. Se establece la importancia y características de los análisis a través de las frecuencias naturales. Por último se muestran los casos de estudio planteados y los resultados obtenidos.
Los casos de estudio están desarrollados en el dominio de la frecuencia. Una parte innovadora del presente trabajo es el uso de sistemas neuro difusos que permiten optimizar los resultados obtenidos a partir de la simulación numérica con las redes neuronales artificiales de retropropagación.
El primer caso de estudio (únicamente localización) se desarrolla con el siguiente procedimiento: Se simula el modelo físico con el programa ANSYS de elementos finitos, obteniéndose un pseudo código y posteriormente, con una instrucción preprogramada, se estudian doscientos casos. En cada uno de ellos se evalúan las cinco primeras frecuencias naturales de la placa con un solo defecto postulado a la vez. La información sintética obtenida integra una base de datos y se divide en dos partes. La primera consta de ciento cincuenta casos, que se emplea como patrón de referencia para entrenar una red neuronal de varias capas con el algoritmo de retropropagación, cuyas principales características son: red robusta poco sensible al ruido, se utiliza un arreglo con la siguiente estructura 5-25-2 de neuronas por capa. La información de entrada son las cinco primeras frecuencias, los datos de salida son las coordenadas de los defectos. La segunda parte consta de cincuenta casos que se sirven para verificar la precisión de la red neuronal propuesta, con la que se estima la localización de los defectos. Los resultados obtenidos se analizan estadísticamente. En general no muestran una dispersión grande. El procedimiento descrito con anterioridad es sencillo de implementar y permite una localización rápida de defectos. En forma general y en términos estadísticos, hay un buen grado de precisión en la localización de los defectos.
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
iii
ABSTRACT.
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
vi
ÍNDICE.
SIP 14. i
Derechos. ii
Resumen. iv
Abstract. v
Índice. vi
Índice de figuras. viii
Índice de tablas. xi
Justificación. xiv
Hipótesis. xvi
Objetivo general. xvii
Objetivos particulares. xviii
Introducción. xix
Capítulo I. Antecedentes Generales sobre las Redes Neuronales Artificiales.
1.1. Semejanza Biológico – Numérica. 4
1.2. Redes Neuronales Artificiales, Lógica Difusa y Lógica
Neuro Difusa. 8
1.3. Aplicación de las Redes Neuronales Artificiales en
problemas de ingeniería. 11
1.4. Antecedentes en la Localización y Clasificación de
Defectos Utilizando Redes Neuronales Artificiales. 15 1.4.1. Localización y Clasificación de Defectos: Redes
Neuronales Artificiales – Frecuencias Naturales. 17 1.5 Descripción de los Sistemas de Digitalización de Datos. 18
1.6. Planteamiento del Caso de Estudio. 21
1.7. Sumario. 23
1.8. Referencias. 23
Capítulo II. Fundamentos Teóricos sobre Redes Neuronales Artificiales de Retropropagación.
2.1. Formulación matemática. 29
2.2. Métodos de aprendizaje de las Redes Neuronales
Artificiales. 32
2.3. Características de las Redes Neuronales Artificiales. 33 2.4. Paradigmas de las Redes Neuronales Artificiales. 34
2.5. Algoritmo de retropropagación. 36
2.5.1. Cálculo del gradiente para una red neuronal con una capa oculta.
39
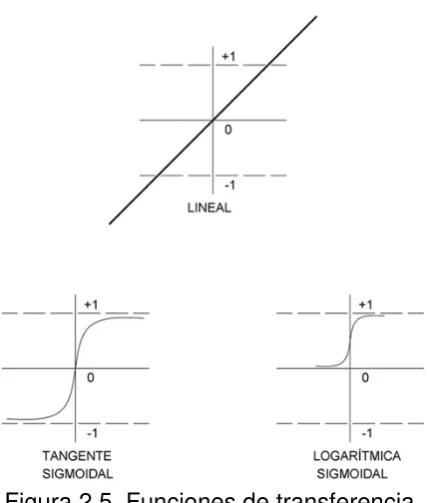
2.5.2. Funciones de transferencia. 41
2.6. Sumario. 43
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
vii
Capítulo III. Fundamentos Teóricos sobre Lógica Neuro - Difusa.
3.1. Introducción a la lógica difusa y neuro difusa. 45 3.2. Análisis bibliográfico sobre el uso de la lógica Neuro –
Difusa. 46
3.3. Fundamentos teóricos de la lógica difusa. 47 3.4. Fundamentos teóricos de lógica neuro difusa. 52
3.5. Sumario. 55
3.6. Referencias. 55
Capítulo IV. Análisis Dinámicos.
4.1. Consideraciones de modelos de sistemas dinámicos. 58
4.2. Importancia del análisis modal. 60
4.3. Ecuación del movimiento. 61
4.4. Formulación matemática para el cálculo de frecuencias
naturales en una viga en cantiléver. 64
4.5. Sumario. 66
4.6. Referencias. 66
Capítulo V. Consideraciones para el Modelo Experimental.
5.1. Consideraciones. 68
5.2. Comparación de valores. 76
5.3. Sumario. 79
5.4. Referencias. 79
Capítulo VI. Aplicación de las Redes Neuronales Artificiales a la Detección y Clasificación de Defectos.
6.1. Resumen de la Metodología y Casos de Estudio. 81
6.2. Localización Caso A. 83
6.3. Localización y Clasificación Caso B. 85
6.4. Localización, Clasificación y Análisis de Ruido Caso C. 87
6.5. Localización y Clasificación Caso D. 90
6.6. Sumario 93
6.7. Referencias 93
Capítulo VII. Evaluación de Resultados.
7.1. Resumen de Resultados. 96
7.2. Breve Descripción de la Técnica Estadística. 97
7.3. Resultados Obtenidos del Caso A. 98
7.3.1. Placa sin muesca. 99
7.3.2. Placa con muesca. 102
7.4. Resultados Obtenidos del Caso B. 104
7.4.1. Barra plana. 104
7.4.2. Barra con muesca. 112
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
viii
7.5.1. Ruido artificial. 129
7.6. Comparación de casos de estudio A, B y C. 132
7.7. Resultados Obtenidos del Caso D. 133
7.7.1. Barra plana. 133
7.7.2. Barra con muesca. 140
7.8 Sumario. 147
7.9 Referencias. 147
Conclusiones. 148
Recomendaciones. 151
Artículo aceptado. 153
Anexos. 160
ÍNDICE DE FIGURAS.
Figura 1.1. Neurona biológica con sus componentes. 4 Figura 1.2. Esquema de una Red Neuronal Artificial (RNA). 7
Figura 2.1. Modelo de una neurona básica. 30
Figura 2.2. Trabajo desarrollado por una neurona. 30
Figura 2.3. Funciones no lineales típicas. 31
Figura 2.4. Esquema del funcionamiento del algoritmo de retropropagación.
37
Figura 2.5. Funciones de transferencia. 42
Figura 3.1. Transición gradual entre conjuntos. 48
Figura 3.2. Gráfica de la función GBELLMF. 52
Figura 3.3. Arquitectura de un sistema neuro difuso. 53 Figura 4.1. Modelo dinámico de un grado de libertad. 58 Figura 4.2. Modelo típico de un sistema con un grado de libertad. 61 Figura 4.3. Descripción física de los conceptos de vibración. 64 Figura 5.1. Frecuencia típica de algunos tipos de sujeción (a) tipo
de sujeción, (b) frecuencia 73
Figura 5.2 Diagrama del espécimen experimental. 76
Figura 5.3 Modelo de elementos finitos. 77
Figura 5.4 Montaje experimental. 79
Figura 6.1. Resumen de la metodología propuesta. 81
Figura 6.2. Resumen de los casos propuestos. 82
Figura 6.3. Resumen de casos y defectos considerados. 82 Figura 6.4. Esquema de las barras analizadas: (A) barra plana
sencilla, (B) barra plana con muesca. 83
Figura 6.5. Modelo de simulación numérica, con detalle del defecto
postulado y condiciones de frontera. 84
Figura 6.6. Dimensiones de la barra analizada (A) Barra plana; (B)
Barra con muesca. 86
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
ix Barra plana; (B) Barra con muesca.
Figura 6.8. Dimensiones y características del modelo utilizado. 88 Figura 6.9. Red de elementos finitos del modelo de simulación
numérica. 88
Figura 6.10. Dimensiones de la barra analizada (A) Barra plana;
(B) Barra con muesca. 91
Figura 6.11. Malla de elementos finitos de las barras analizadas
(A) Barra plana; (B) Barra con muesca. 92
Figura 7.1. Histograma de residuos: placa sin muesca coordenada
X. 100
Figura 7.2. Errores absolutos: placa sin muesca coordenada X. 100 Figura 7.3. Histograma de residuos: placa sin muesca coordenada
Y. 101
Figura 7.4. Errores absolutos: placa sin muesca coordenada Y. 101 Figura 7.5. Histograma de residuos: placa con muesca coordenada
X. 102
Figura 7.6. Errores absolutos: placa con muesca coordenada X. 103 Figura 7.7. Histograma de residuos: placa con muesca coordenada
Y. 104
Figura 7.8. Errores absolutos: placa con muesca coordenada Y. 104 Figura 7.9. Comparación de 10 puntos tomados al azar del
conjunto de datos resultantes (barra plana). 105
Figura 7.10. Clasificación de los defectos (barra plana). 106 Figura 7.11. Error absoluto de diez puntos tomados al azar (barra
plana). 107
Figura 7.12. Comparación de 10 puntos tomados al azar del
conjunto de datos resultantes (barra con muesca). 108 Figura 7.13. Clasificación de los defectos (barra con muesca). 108 Figura 7.14. Error absoluto de diez puntos tomados al azar (barra
con muesca). 109
Figura 7.15. Histograma de residuos: localización con análisis
neuro difuso barra plana coordenada Y. 110
Figura 7.16. Histograma de residuos: clasificación con RNA barra
plana. 111
Figura 7.17. Histograma de residuos: clasificación con análisis
neuro difuso barra plana. 111
Figura 7.18. Comparación de 10 puntos tomados al azar del
conjunto de datos resultantes (barra con muesca). 112 Figura 7.19. Clasificación de los defectos (barra con muesca). 113 Figura 7.20. Error absoluto de diez puntos tomados al azar (barra
con muesca). 114
Figura 7.21. Histograma de residuos: localización con RNA barra
con muesca coordenada X. 115
Figura 7.22. Histograma de residuos: localización con análisis
neuro difuso barra con muesca coordenada X. 115
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
x con muesca coordenada Y.
Figura 7.24. Histograma de residuos: localización con análisis
neuro difuso barra con muesca coordenada Y. 117
Figura 7.25. Histograma de residuos: clasificación con RNA barra
con muesca. 118
Figura 7.26. Histograma de residuos: clasificación con análisis
neuro difuso barra con muesca. 118
Figura 7.27. Comparación de diez puntos tomados al azar para las
coordenadas X, Y. 120
Figura 7.28. Clasificación de defectos. 120
Figura 7.29. Error absoluto de diez puntos tomados al azar. 121 Figura 7.30. Histograma de residuos: localización con RNA placa
con dos muescas coordenada X. 122
Figura 7.31. Histograma de residuos: localización con análisis
neuro difuso placa con dos muescas coordenada X. 123 Figura 7.32. Histograma de residuos: localización con RNA placa
con dos muescas coordenada Y. 124
Figura 7.32A. Histograma de residuos: localización con análisis
neuro difuso placa con dos muescas coordenada Y. 124 Figura 7.33. Histograma de residuos: clasificación con RNA placa
con dos muescas. 125
Figura 7.34. Histograma de residuos: clasificación con análisis
neuro difuso placa sin muesca. 126
Figura 7.35. Histograma de residuos: localización con RNA placa
con dos muescas coordenada X. 127
Figura 7.36. Histograma de residuos: localización con análisis
neuro difuso placa con dos muescas coordenada X. 128 Figura 7.37. Histograma de residuos: localización con RNA placa
con dos muescas coordenada Y. 129
Figura 7.38. Histograma de residuos: localización con análisis
neuro difuso placa con dos muescas coordenada Y. 130 Figura 7.39. Histograma de residuos: clasificación con RNA placa
con dos muescas. 131
Figura 7.40. Histograma de residuos: clasificación con análisis
neuro difuso placa sin muesca. 131
Figura 7.41. Comparación de 10 puntos tomados al azar del
conjunto de datos resultantes (barra plana). 134
Figura 7.42. Clasificación de los defectos (barra plana). 134 Figura 7.43. Error absoluto de diez puntos tomados al azar (barra
plana). 135
Figura 7.44. Histograma de residuos: localización con RNA barra
plana coordenada X. 136
Figura 7.45. Histograma de residuos: localización con análisis
neuro difuso barra plana coordenada X. 137
Figura 7.46. Histograma de residuos: localización con RNA barra
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xi Figura 7.47. Histograma de residuos: localización con análisis
neuro difuso barra plana coordenada Y. 138
Figura 7.48. Histograma de residuos: clasificación con RNA barra
plana. 139
Figura 7.49. Histograma de residuos: clasificación con análisis
neuro difuso barra plana. 140
Figura 7.50. Comparación de 10 puntos tomados al azar del
conjunto de datos resultantes (barra con muesca). 141 Figura 7.51. Clasificación de los defectos (barra con muesca). 141 Figura 7.52. Error absoluto de diez puntos tomados al azar (barra
con muesca). 142
Figura 7.53. Histograma de residuos: localización con RNA barra
con muesca coordenada X. 143
Figura 7.54. Histograma de residuos: localización con análisis
neuro difuso barra con muesca coordenada X. 144
Figura 7.55. Histograma de residuos: localización con RNA barra
con muesca coordenada Y. 145
Figura 7.56. Histograma de residuos: localización con análisis
neuro difuso barra con muesca coordenada Y. 145
Figura 7.57. Histograma de residuos: clasificación con RNA barra
con muesca. 146
Figura 7.58. Histograma de residuos: clasificación con análisis
neuro difuso barra con muesca. 147
ÍNDICE DE TABLAS.
Tabla 1.1. Elementos constituyentes de la computación blanda. 9 Tabla 1.2. Desarrollo histórico de la computación blanda. 10 Tabla 3.1. Identidades básicas en operaciones de conjuntos. 49
Tabla 5.1 Valores de la constante C 78
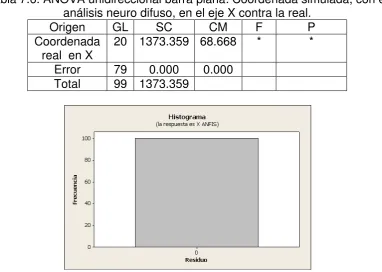
Tabla 7.1. ANOVA unidireccional placa sin muesca: Coordenada
simulada en el eje X contra la real. 99
Tabla 7.2. ANOVA unidireccional placa sin muesca: Coordenada
simulada en el eje Y contra la real. 100
Tabla 7.3. ANOVA unidireccional placa con muesca: Coordenada
simulada en el eje X contra la real. 102
Tabla 7.4. ANOVA unidireccional placa con muesca: Coordenada
simulada en el eje Y contra la real. 103
Tabla 7.5. ANOVA unidireccional barra plana: Coordenada
simulada, con la RNA, en el eje X contra la real. 107 Tabla 7.6. ANOVA unidireccional barra plana: Coordenada
simulada, con el análisis neuro difuso, en el eje X contra la real. 108 Tabla 7.7. ANOVA unidireccional barra plana: Coordenada
simulada, con la RNA, en el eje Y contra la real. 109 Tabla 7.8. ANOVA unidireccional barra plana: Coordenada
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xii Tabla 7.9. ANOVA unidireccional barra plana: Coordenada
simulada, con la RNA, para la clasificación. 110
Tabla 7.10. ANOVA unidireccional barra plana: Coordenada
simulada, con el análisis neuro difuso, para la clasificación. 111 Tabla 7.11. ANOVA unidireccional barra con muesca: Coordenada
simulada, con la RNA, en el eje X contra la real. 114 Tabla 7.12. ANOVA unidireccional barra con muesca: Coordenada
simulada, con el análisis neuro difuso, en el eje X contra la real. 115 Tabla 7.13. ANOVA unidireccional barra con muesca: Coordenada
simulada, con la RNA, en el eje Y contra la real. 116 Tabla 7.14. ANOVA unidireccional barra con muesca: Coordenada
simulada, con el análisis neuro difuso, en el eje Y contra la real. 116 Tabla 7.15. ANOVA unidireccional barra con muesca: Coordenada
simulada, con la RNA, para la clasificación. 117
Tabla 7.16. ANOVA unidireccional barra con muesca: Coordenada
simulada, con el análisis neuro difuso, para la clasificación. 118 Tabla 7.17. Análisis de errores absolutos coordenada X, Y. 120 Tabla 7.18. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con la RNA, en el eje X contra la real. 121 Tabla 7.19. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con el análisis neuro difuso, en el eje X contra la real.
122
Tabla 7.20. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con la RNA, en el eje Y contra la real. 123 Tabla 7.21. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con el análisis neuro difuso, en el eje Y contra la real.
124
Tabla 7.22. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con la RNA, para la clasificación. 125 Tabla 7.23. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con el análisis neuro difuso, para la clasificación.
126
Tabla 7.24. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con la RNA, en el eje X contra la real. 127 Tabla 7.25. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con el análisis neuro difuso, en el eje X contra la real.
128
Tabla 7.26. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con la RNA, en el eje Y contra la real. 128 Tabla 7.27. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con el análisis neuro difuso, en el eje Y contra la real.
129
Tabla 7.28. ANOVA unidireccional placa con dos muescas:
Coordenada simulada, con la RNA, para la clasificación. 130 Tabla 7.29. ANOVA unidireccional placa con dos muescas:
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xiii clasificación.
Tabla 7.30. Comparativo de datos localizados y clasificados (±5%
de error). 132
Tabla 7.31. Comparativo de datos localizados y clasificados con
perturbación entre 0 y 2% (Rango de precisión ±10%). 133 Tabla 7.32. ANOVA unidireccional barra plana: Coordenada
simulada, con la RNA, en el eje X contra la real. 136 Tabla 7.33. ANOVA unidireccional barra plana: Coordenada
simulada, con el análisis neuro difuso, en el eje X contra la real. 136 Tabla 7.34. ANOVA unidireccional barra plana: Coordenada
simulada, con la RNA, en el eje Y contra la real. 137 Tabla 7.35. ANOVA unidireccional barra plana: Coordenada
simulada, con el análisis neuro difuso, en el eje Y contra la real. 138 Tabla 7.36. ANOVA unidireccional barra plana: Coordenada
simulada, con la RNA, para la clasificación. 139
Tabla 7.37. ANOVA unidireccional barra plana: Coordenada
simulada, con el análisis neuro difuso, para la clasificación. 139 Tabla 7.38. ANOVA unidireccional barra con muesca: Coordenada
simulada, con la RNA, en el eje X contra la real. 143 Tabla 7.39. ANOVA unidireccional barra con muesca: Coordenada
simulada, con el análisis neuro difuso, en el eje X contra la real. 143 Tabla 7.40. ANOVA unidireccional barra con muesca: Coordenada
simulada, con la RNA, en el eje Y contra la real. 144 Tabla 7.41. ANOVA unidireccional barra con muesca: Coordenada
simulada, con el análisis neuro difuso, en el eje Y contra la real. 145 Tabla 7.42. ANOVA unidireccional barra con muesca: Coordenada
simulada, con la RNA, para la clasificación. 146
Tabla 7.43. ANOVA unidireccional barra con muesca: Coordenada
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xi
JUSTIFICACIÓN.
Los avances en las ciencias computacionales, han permitido a la humanidad desarrollarse en áreas del conocimiento que antes se pensaban inalcanzables, nuevas técnicas y herramientas numéricas permiten desarrollos rápidos, precisos y confiables.
Bajo este esquema se pueden enunciar técnicas como el Método del Elemento Finito, Método de las Diferencias Finitas, Método del Elemento Frontera, Método del Elemento Banda, entre otros; permitiendo desarrollar distintas aplicaciones en diversos campos de la física a través de la solución de ecuaciones diferenciales en derivadas parciales, con condiciones iniciales y finales definidas.
Es así que de manera importante, los programas centralizados como ANSYS, CATIA, NASTRAM, UNIGRAPHICS, etc. han ayudado en la labor antes mencionada. Sin embargo, tienen restricciones debido a que siguen reglas estrictas que no se pueden omitir, además en ocasiones los propios analistas no entienden la relación que existe entre un fenómeno físico y un conjunto de variables asociadas a él. Los métodos mencionados con anterioridad siguen una estructura lógica, ordenada y secuencial (dada por el programador) para alcanzar sus fines. Sin embargo, la información que proviene del mundo real es masiva, redundante e imprecisa. El cerebro, es capaz de percibir y recibir toda esa información a través de los órganos sensoriales, analizarla, procesarla y emitir una respuesta o solución a partir de ella. Tomando en consideración esa capacidad los investigadores se han dado a la tarea de desarrollar programas de cálculo que emulen ese proceso descentralizado, paralelo, no lineal, auto-organizado, etc. para resolver problemas.
Unas décadas atrás, se comenzó el desarrollo de las Redes Neuronales Artificiales (RNA) y su aplicación en diferentes áreas del conocimiento se ha incrementado con el paso de los años, como ejemplo se puede citar la detección de defectos, predicción de características geológicas, control de autómatas, diseño de sistemas expertos, por mencionar algunos de ellos. Las RNA, como los perceptrones, al contrario de otros métodos numéricos, no utilizan algoritmos de cálculo secuenciales. Sino que aprenden o se auto-organizan a través de los datos que se le suministran y son capaces de emitir una respuesta o establecer un patrón de análisis, con o sin ayuda de un
algoritmo supervisor llamado “maestro”.
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xii por entender la forma en que están relacionados los defectos, fallas o fracturas con el medio ambiente y todos los factores que en un momento dado pueden estar involucrados.
Una de las técnicas que se ha desarrollado para lograr la comprensión antes mencionada son los análisis inversos que de manera general plantean el uso de la respuesta mecánica de un cuerpo para llegar a las características físicas que ocasionaron ese comportamiento.
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xiii
HIPÓTESIS.
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xiv
OBJETIVO GENERAL.
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xv
OBJETIVOS PARTICULARES.
Generar bases de datos sintéticas, que contienen los datos de las cinco primeras frecuencias naturales, con ayuda de ANSYS.
Crear bases de datos hibridas con ayuda de sistemas de adquisición de datos y ANSYS.
Observar los elementos que constituyen el diseño de una RNA de retropropagación, dentro de MATLAB, para seleccionar los que mejor se adecuen a los problemas planteados.
Analizar la cantidad de datos necesaria para lograr la correcta localización de defectos en barras con y sin muesca.
Definir los parámetros de los análisis estadísticos de varianza para establecer el nivel de error obtenido en la localización de defectos a través de RNA de retropropagación.
Localizar y clasificar defectos en barras con y sin muesca a través de RNA de retropropagación y establecer el nivel de error a través del contraste directo de valores.
Optimizar los datos de localización y clasificación obtenidos de la simulación con RNA de retropropagación a través de un análisis neuro difuso (ANFIS).
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xvi
INTRODUCCIÓN.
Los análisis directos, entre los que se pueden mencionar métodos numéricos como el método del elemento finito, el método del elemento frontera, el método del elemento banda, el método de las diferencias finitas, etc. en la solución de problemas de ingeniería juegan un papel protagónico, ya que ofrecen una alternativa viable en aquellos casos que son complejos o requieren para su solución una cantidad de ecuaciones que no es posible manejar con métodos analíticos convencionales.
Por otra parte se tienen los análisis inversos, que implementan el uso de técnicas como las redes neuronales artificiales, los algoritmos genéticos, la lógica difusa, la lógica neuro difusa, etc. Su propósito final es el mismo que los directos, es decir nos permiten encontrar soluciones a problemas complejos.
En la actualidad dichos análisis se pueden clasificar en: (1) estructurados, como el método del elemento finito, y (2) los que asemejan a los procesos biológicos observados en la naturaleza, como las redes neuronales artificiales, en ambos casos se utilizan secuencias denominadas algoritmos de solución.
En el primer caso, los programas contienen una serie de instrucciones secuenciales, es decir, siempre se sigue el mismo proceso para obtener la solución del problema. En este caso, los programas utilizados son rígidos y no permiten variaciones en el proceso de cálculo. Las fórmulas utilizadas están perfectamente definidas y siempre se resuelven una a consecución de la otra sin crear un vínculo o interactuar entre ellas. Si falta algún dato o es inexistente, no se puede obtener la solución. En este contexto se encuentran, entre otros, el método de las diferencias finitas, el método del elemento finito, el método del elemento frontera, etc.
En el segundo caso, los programas son más flexibles y pueden asimilar diversas variantes. Se retroalimentan y generan un “auto aprendizaje” con los datos que se les suministran. Las secuencias de ecuaciones se desarrollan en forma paralela y permiten ajustes durante el proceso, no necesitan todos los datos del problema o que estén perfectamente acotados para llegar a una solución. En este enfoque se encuentran las redes neuronales artificiales, los algoritmos genéticos, los sistemas difusos, sistemas neuro difusos, entre otros. Otras ventajas son que no requieren un elevado número de recursos de cómputo, obteniéndose resultados rápidamente.
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xvii se puede encontrar inmerso, la interrelación con los operarios u otras maquinas, herramientas o dispositivos, etc. Por lo que depende de la experiencia del analista seleccionar las variables más representativas o de interés para un estudio en particular.
Tomando en consideración lo anterior, es claro que un algoritmo rígido, como sucede con el método del elemento finito no puede por sí solo, desarrollar un análisis inverso, por el simple hecho de que las variables inmersas en el proceso no están totalmente definidas. Sin embargo, se encuentra involucrado en el proceso. Debido a que a través de él se puede construir la base de datos sintética y con ayuda de los programas flexibles por ejemplo las redes neuronales artificiales permite encontrar la solución completa al problema planteado.
El presente desarrollo se centra en el uso de redes neuronales artificiales, en específico el paradigma de retropropagación, y el empleo de la técnica de análisis inversos para proponer una metodología en la localización y clasificación de defectos a través del uso de frecuencias naturales, que se evalúan a través del método del elemento finito. Una vez obtenidos los resultados, se implementa la optimización de los mismos a través de la aplicación de análisis neuro difusos y se evalúa el nivel de error empleando dos técnicas.
A continuación se describe brevemente el contenido de cada capítulo.
Capítulo 1. Se establece la semejanza biológica numérica de los modelos de redes neuronales. Se enuncian diversas aplicaciones, a través de la revisión bibliográfica, para la solución de problemas de ingeniería. Se desarrolla la misma revisión, en lo referente a la localización y clasificación de defectos. Además, se muestra el uso de los análisis neuro difusos en diferentes campos de la ciencia. Al final se plantean los casos de estudio a resolver.
Capítulo 2. Se muestran los fundamentos teóricos y matemáticos referentes a las redes neuronales artificiales. Se definen algunas técnicas de aprendizaje, paradigmas y características. A demás, se hace particular énfasis en la técnica de retropropagación.
Capítulo 3. Se definen los fundamentos teóricos y matemáticos sobre la lógica difusa y posteriormente la neuro difusa. Se muestran algunas funciones de membrecía relacionadas con el problema planteado.
DETECCIÓN DE DEFECTOS MEDIANTE EL USO DE REDES NEURONALES ARTIFICIALES Y OPTIMIZACIÓN DE RESULTADOS CON LÓGICA NEURO DIFUSA
xviii Capítulo 5. Se aplican las redes neuronales artificiales para localizar y clasificar defectos utilizando la respuesta mecánica de un cuerpo en el dominio de la frecuencia. Además, se emplea la lógica neuro difusa para optimizar los resultados obtenidos.
Capítulo 6. Se evalúan los resultados a través de dos técnicas 1. Análisis de varianza y 2. Por comparación directa de los valores reales contra los simulados de la red neuronal y los optimizados de la lógica neuro difusa. A demás, se postula la aplicación de la técnica desarrollada hacia diferentes campos de la ciencia.
Los aspectos más importantes que se deben mencionar en el desarrollo del presente documento son:
1. Las redes neuronales artificiales de retropropagación logarítmica sigmoidal, son utilizadas para localizar y clasificar defectos utilizando únicamente una arquitectura multicapa.
2. Los sistemas de inferencia neuro difuso, se implementan como instrumento de optimización logrando una mejora sustantiva en los resultados obtenidos.
3. Las bases de datos empleadas son sintéticas y se utilizan de tal forma que se da solución al problema inverso que se plantea. En términos muy generales es: determinar el tipo y posición de defectos a través de la respuesta mecánica de un cuerpo en el dominio de la frecuencia.
De los puntos enunciados con anterioridad el elemento innovador y de aporte científico se ubica en la posición dos, debido a que durante la revisión bibliográfica (de ese periodo de tiempo) no se encontró un desarrollo similar al planteado. Esto permitió la publicación de un artículo a nivel internacional en la revista Applied Mechanics and Materials Vols. 13-14 durante el 2008 (ver anexo)
Otros trabajos que se pueden mencionar, desarrollados en el Instituto Politécnico Nacional, y que están vinculados al presente trabajo son:
Proyecto: Análisis de Esfuerzos Numéricos y Experimental en Sistemas Prótesis – Vértebra. Registro: 20060497.
Proyecto: Análisis de Esfuerzos Numéricos y Experimental en Sistemas Prótesis – Vértebra. Registro: 20070479.
Proyecto: Aplicación de Redes Neuronales en la Solución de Problemas de Biomecánica. Registro: 20080663.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 3
Capítulo I: Antecedentes
Generales sobre las
Redes Neuronales
Artificiales.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 4
1.1. Semejanza Biológico – Numérica.
Antes de iniciar el estudio de las redes neuronales artificiales es conveniente exponer algunos conceptos básicos de los sistemas neuronales biológicos, para establecer más fácilmente el paralelismo que existe entre ellos.
En 1852 nace en Navarra, España, el científico Santiago Ramón y Cajal, es conocido por descubrir los mecanismos que gobiernan la morfología y los procesos conectivos de las células nerviosas. Por dicho descubrimiento recibe el Premio Nobel en 1906, muere en Madrid en 1934. En su obra “TEXTURA” realiza un monumental estudio y descripción en detalle del sistema nervioso de los vertebrados.
[image:25.595.100.496.430.733.2]Una neurona (del griego: célula nerviosa), figura 1.1, es por definición fisiológica, la unidad anatómico-funcional del sistema nervioso. Está constituida por un cuerpo celular que presenta varias prolongaciones; a la más larga se le llama cilindroeje, y a las otras más cortas se les da el nombre de dendritas. El primero se encuentra cubierto por una vaina aislante que tiene en su interior una sustancia llamada mielina, ésta recibe el nombre de vaina de Schwann. El cuerpo neuronal es el lugar donde ocurre la información funcional que genera un estímulo o lo registra, el cilindro-eje sirve de guía de conducción a los estímulos. En la transmisión de los impulsos regulares toman parte varias neuronas.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 5
La neurona es una unidad de procesamiento simple y se comunica con otras neuronas a través de formas filamentarias llamadas dendritas (del griego: ramificaciones). Estas abarcan zonas extensas en formas ramificadas y están conectadas al soma (del griego: cuerpo) de la célula nerviosa, que tiene una forma piramidal o cilíndrica. La superficie exterior de la neurona está cubierta por la membrana. Así como el interior y exterior de la célula por fluido intra y extra celular respectivamente. Cuando la neurona es excitada, a un nivel determinado, se activa y transmite una señal eléctrica a lo largo del axón. Este último termina en ramificaciones filamentarias llamadas final del axón que están conectadas con dendritas de otras neuronas, a esta conexión se le denomina sinapsis (del griego: contacto). Una sola neurona puede tener entre 1000 y 10000 contactos, que a su vez estimulan alrededor de 1000 neuronas. Cuando el estímulo llega al final del axón se liberan mensajeros químicos conocidos como neurotransmisores, estos últimos, son transportados en pequeñas formas esféricas llamadas versículos, los anteriores, son los responsables de la comunicación efectiva entre las neuronas.
Los neurotransmisores pueden ser excitadores, si la carga eléctrica es más positiva, o inhibidores si ocurre lo opuesto. La decodificación de las señales se puede llevar a cabo de dos maneras: suma temporal, ocurre a través de funciones de impulso como los dientes de sierra o la forma escalón unitario, y la suma espacio temporal, es la integración de todos los estímulos recibidos por las neuronas. Ejemplo de la primera es la reacción del cuerpo a un estímulo doloroso y la segunda se puede especificar como un proceso de toma de decisión. La transmisión de las señales es a través del axón, esté último está cubierto por una sustancia llamada mielina que está segmentada. Tiene el propósito de reducir la capacitancia de la membrana para incrementar la velocidad de propagación y los espacios libres, conocidos como nodos de Ranvier, funcionan como amplificadores de la señal. Este proceso es efectivo y puede transmitir un estímulo a más de 1m de distancia.
No todas las neuronas hacen las mismas funciones, algunas son sensoriales, otras motoras y otras mucho más complejas. Estás últimas realizan la interpretación de las situaciones (tangibles o no) que se perciben como reales. Sin embargo, todas las redes neuronales muestran algunas propiedades en común:
1. Existen muchas conexiones en paralelo entre muchas neuronas. 2. Muchas conexiones en paralelo proporcionan retroalimentación a otras neuronas y a ellas mismas.
3. Algunas neuronas pueden excitar a otras mientras inhiben el estímulo a algunas más.
4. Algunas zonas de la red neuronal se pueden inhibir completamente y otras encontrarse en desarrollo.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 6
7. Las redes neuronales ejecutan programas que están completamente distribuidos y no secuencialmente definidos.
8. Las redes neuronales no poseen una unidad de procesamiento central, su modo de ejecutar alguna secuencia es distribuida.
Las redes neuronales poseen una arquitectura jerárquica, es así que pueden aprender, adaptarse, clasificar, almacenar, recordar, cruzar, interpolar y extrapolar la información.
Como se mencionó con anterioridad, al contacto de las neuronas entre sí se llama sinapsis, esto último permite el paso de los estímulos de una neurona a otra y es la responsable del desarrollo del biocomputo. En la naturaleza, la sinapsis compara patrones a través de un simple contraste, este proceso es comparable al armado de un rompecabezas. Por otro lado los computadores binarios, deben comparar bit por bit para establecer un patrón, de esta manera, se utilizan muchos recursos de cómputo y tiempo. Un hecho importante es que la señal transmitida por la sinapsis es digital, en el sentido de que existe o no, y todas ellas son de diferente magnitud.
Durante el desarrollo de un ser vivo, el cerebro se modela, de forma que existen muchas cualidades del individuo que no son innatas, sino que se adquieren por la influencia de la información que del medio externo proporcionan sus sensores (sentidos). Existen diferentes formas de modelar el sistema nervioso: por el establecimiento de nuevas conexiones, ruptura de otras, modelado de las intensidades sinápticas o incluso mediante la muerte y creación neuronal. Este tipo de acciones en especial, la modificación de las intensidades sinápticas serán las que utilicen los sistemas neuronales artificiales para llevar a cabo el aprendizaje.
El cerebro y el computador convencional son muy diferentes, el primero es un sistema complejo de procesamiento, no lineal, masivamente paralelo y adaptativo, muy eficiente desde el punto de vista energético, mientras que el segundo realiza operaciones en forma secuencial pudiendo manejar grandes masas de datos realizando operaciones en forma centralizada. Curiosamente, las neuronas son mucho más simples, lentas y menos fiables que un computador y a pesar de ello existen problemas difícilmente abordables por una computadora convencional, que el cerebro resuelve eficazmente.
Los actuales ordenadores son máquinas de Von Neumann, en esencia una máquina de procesamiento que actúa ejecutando en serie una secuencia de instrucciones (programa) que almacena en su memoria, el verdadero corazón del computador es el microprocesador.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 7
con eficiencia, puede resultar conveniente construir sistemas que copien en cierto modo, la estructura de las redes neuronales biológicas, con el fin de alcanzar una funcionalidad similar.
Los tres conceptos clave de los sistemas nerviosos, que se pretende simular en los artificiales son:
Paralelismo de cálculo. Memoria distribuida. Adaptabilidad.
Los elementos básicos de un sistema neuronal biológico son las neuronas, que se agrupan en conjuntos compuestos por millones de ellas, organizadas en capas (jerarquías), constituyendo un sistema con funcionalidad propia. En la realización de un sistema neuronal artificial puede establecerse una estructura jerárquica similar. El elemento esencial de partida será la neurona artificial, que se organizará en capas; varias de estas constituirán una red neuronal, junto con las interfaces de entrada y salida (sinapsis), más los módulos convencionales adicionales necesarios (funciones de transferencia, pesos, funciones de ajuste) constituirán el sistema global del proceso.
Una definición interesante de red neuronal hace uso del concepto matemático de GRAFO, objeto consistente en un conjunto de nodos, más un conjunto de conexiones establecidas entre ellos. En este caso, el grafo describe la arquitectura del sistema y proporciona los canales por los que puede ejecutarse su dinámica.
Figura 1.2. Esquema de una Red Neuronal Artificial.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 8
salientes. Las que no son, ni de entrada, ni de salida, se denominan neuronas ocultas. Una red es unidireccional cuando no presenta regresos cerrados de conexiones. Alternativamente, una red es recurrente cuando el flujo de información puede encontrar un regreso de adelante hacia atrás, es decir una retroalimentación.
1.2. Redes Neuronales Artificiales, Lógica Difusa y Lógica Neuro Difusa.
Recientemente, algunos investigadores han creando modelos, tanto en circuitos como en programas, que interpretan la actividad cerebral en un esfuerzo por producir una forma de inteligencia artificial (interpretación, comparación de patrones y toma de decisiones). Las redes neuronales artificiales (RNA) son utilizadas por primera vez en el año 1943, cuando McCulloch y Pitts [1.2] proponen el primer modelo simple de este tipo, muchas formas de RNA y tipos se han desarrollado desde entonces. Sin embargo, las investigaciones sobre este tema fueron retrasadas debido a la aparición de un libro que lleva por nombre “Perceptrones” publicado por Minsky y Papert [1.3]. En este, se describe la imposibilidad de una RNA para generalizar los resultados buscados y uno de los principales argumentos utilizados son las compuertas lógicas. Posteriormente, Kolmogorov [1.4] probó que una RNA de 3 capas era capaz de aprender y generalizar resultados previendo que esta tenga las suficientes neuronas por capa, de esta manera los trabajos de investigación se reactivaron.
Las RNA, están compuestas de muchos elementos sencillos que operan en paralelo, el diseño de la red está determinado mayormente por las conexiones entre sus elementos. Al igual que las sinapsis de las neuronas cerebrales. La idea de las redes neuronales fue concebida originalmente como un intento de modelar la biofisiología del cerebro humano, esto es, entender y explicar cómo funciona y opera el cerebro. La meta era crear un modelo capaz de emular el proceso humano de razonamiento. La mayor parte de los trabajos iniciales en redes neuronales fue realizada por fisiólogos y no por ingenieros.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 9
“La computación evolutiva es una aproximación que surge para calcular en forma paralela la habilidad de la mente humana de razonar y aprender en un ambiente de incertidumbre e imprecisión” [1.5]
La computación evolutiva incluye varios paradigmas, entre los que se encuentran: las redes neuronales artificiales, la teoría de conjuntos difusos, la inteligencia artificial, los algoritmos genéticos y la inteligencia artificial convencional. Cada uno de los mencionados con anterioridad posee fortalezas que son resumidas en la tabla 1.1.
Tabla 1.1. Elementos constituyentes de la computación evolutiva.
Metodología Fortalezas
Red Neuronal Artificial Aprendizaje y adaptabilidad Teoría de los Conjuntos
Difusos
Representación de los conocimientos a través de las reglas difusas SI-ENTONCES
Algoritmos Genéticos Búsqueda sistemática aleatoria Inteligencia Artificial
Convencional
Manipulación simbólica
La sinergia entre las áreas mencionadas con anterioridad permite a la computación evolutiva incorporar el conocimiento humano en forma efectiva, a pesar de la incertidumbre e imprecisión, los algoritmos aprenden, se adaptan o modifican el ambiente hacia un mejor desempeño. En términos generales, la computación evolutiva no utiliza mucha manipulación simbólica, así que se puede establecer que es una nueva disciplina que complementa las aproximaciones de la inteligencia artificial convencional y viceversa.
Los humanos utilizamos variables lingüísticas para razonar y tomar decisiones. La inteligencia artificial convencional trata de imitar este proceso a través de reglas simbólicas, que son estructuradas en bases de conocimiento. Las anteriores son llamadas sistema hipotético de símbolos físicos, este sistema da las bases para el modelado de sistemas expertos, toda vez que el conocimiento esté disponible en forma explícita.
La combinación de inteligencia artificial convencional y la computación evolutiva se están integrando de tal manera que se ha empezado a utilizar el término inteligencia artificial moderna. Con el desarrollo de algoritmos inspirados en procesos biológicos y la tendencia descrita con anterioridad, la computación evolutiva tiende más hacia la cibernética (estudio de la información y control en máquinas y humanos).
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 10
Tabla 1.2. Desarrollo histórico de la computación evolutiva [1.6]. Año Inteligencia
Artificial
Redes Neuronales Artificiales
Lógica Difusa Algoritmos Genéticos 1940 1947
Cibernética
1943 Modelo de
Neurona de
McCulloch-Pitts 1950 1956
Inteligencia Artificial
1957 Perceptrón
1960 1960 Lenguaje silbante
1960 Adaline
Madaline
1965 Conjuntos difusos 1970 Mediados de
1970, sistemas expertos
1974 Algoritmo de retropropagación 1975 Cognitron Neocognitron
1974 Control difuso
1970 Algoritmos genéticos
1980 1980 Mapas de auto
organización
1982 Red de
Hopfield
1983 Máquina de Boltzmann
1986 Auge del
algoritmo de
retropropagación
1985 Modelado difuso
(modelo TSK)
Mediados de
1980 vida
artificial
1990 1990
Modelado Neuro Difuso 1991 ANFIS 1994 CANFIS 1990 Programación Genética
En una forma de interpretación simple, se puede decir que una red neuronal artificial es una aproximación no algorítmica que intenta simular un sistema dinámico no lineal en el espació tiempo continuo. Por otro lado, la lógica difusa provee un cálculo sistemático a través de variables lingüísticas y desarrolla procesos computacionales numéricos con el uso de etiquetas llamadas funciones de membrecía. Las reglas SI-ENTONCES son el componente básico y soporte de los sistemas de inferencia difusa, que en forma efectiva pueden modelar a un humano experto en un área específica. De esta manera, si se incorpora el concepto de aprendizaje de una red neuronal artificial en un sistema de inferencia difusa, resulta en un modelo neuro difuso. Esta última es una técnica fundamental en la computación evolutiva.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 11
1.3. Aplicación de las Redes Neuronales Artificiales en problemas de ingeniería.
Hasta hace algunos años, se pensaba que muchos problemas en ingeniería no poseían solución. La aparición de la computadora combinada con métodos numéricos, inteligencia artificial convencional, lógica difusa, redes neuronales artificiales, algoritmos genéticos, lógica neuro difusa, etc. permiten entender y analizar planteamientos complejos.
Yagawa y Okuda [1.8] desarrollan una revisión del estado del arte de aplicaciones de mecánica computacional en diferentes campos de la ciencia: evaluación cuantitativa no destructiva para la identificación estructural de daños, modelado de materiales visco-plásticos, análisis del crecimiento de grietas en especímenes soldados, diseño estructural, estimación de parámetros involucrados en el análisis no lineal a través del método de elementos finitos y solución de ecuaciones. En este documento se muestra claramente como la mecánica computacional se ha convertido en una herramienta indispensable en áreas experimentales y de aplicación práctica en campo. A continuación, se plantea una reflexión sobre la técnica de evaluación cuantitativa no destructiva por ser está la de mayor interés para el desarrollo del presente trabajo.
A través del uso de la evaluación no destructiva (ondas ultrasónicas, rayos X, polvos magnéticos, corrientes de Eddy, etc.) se puede saber si un dispositivo (herramienta, maquinaria, estructura, etc.) posee grietas o defectos. Esta información es crucial para la seguridad y consecución de los procesos productivos. Sin embargo, no identifican la localización, forma, posición y tamaño. Es en esta área donde la evaluación cuantitativa no destructiva, también llamada QNDE (del inglés Quantitative Nondestructive Evaluation) y las redes neuronales artificiales se unen para caracterizar un problema inverso.
Se puede decir que: los problemas inversos son tópicos matemáticos relacionados a diferentes áreas del conocimiento. Se pueden describir como problemas en los cuales se conoce la respuesta pero no la pregunta o bien donde se conocen los resultados y/o consecuencias, pero no las causas. Si se consideran, por ejemplo, los problemas de identificación de defectos a través de ondas ultrasónicas. Se pueden definir parámetros como el tamaño y la localización, considerando la respuesta dinámica del sólido. Este es un problema inverso. Por otro lado, si los parámetros del defecto son conocidos, la respuesta dinámica del sólido puede ser calculada a través de mecánica computacional (por ejemplo simulación con Método de Elementos Finitos). Este es un problema directo.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 12
1. Simulación de la respuesta dinámica de un sólido, que contiene defectos que pueden ser manipulados en parámetros como localización, forma, tamaño, profundidad, etc. A través del método de elementos finitos para obtener conjuntos de pares de datos (respuesta dinámica - parámetros).
2. La red neuronal artificial es entrenada con los datos colectados en la primera etapa. La respuesta dinámica son los datos de entrada y los parámetros del defecto son los datos objetivo.
3. La RNA entrenada es utilizada para identificar los parámetros del defecto a partir de la respuesta dinámica medida en un sólido a través de procesos de aplicación (ultrasonido, rayos X, martillo de impactos, etc.).
Un análisis inverso puede ser aplicado a cualquier problema inverso a través del uso de la simulación con mecánica computacional. Esta técnica es aplicable a varios campos de la ciencia.
Muchos problemas en ingeniería son medidos con la ayuda de sensores, sin embargo, los datos así obtenidos en ocasiones son excesivos y complicados de analizar. Corcoran [1.9] realiza una revisión de la interrelación que se puede dar entre los dispositivos antes mencionados y las redes neuronales artificiales. Mellit y Kalogirou [1.10] presentan una disertación sobre los sistemas fotovoltaicos y el uso de las RNA en tres principales áreas: (1) pronóstico y modelado de sistemas meteorológicos, (2) determinar el tamaño y forma de un sistema fotovoltaico y (3) simulación y control de sistemas fotovoltaicos. La información presentada muestra el gran potencial de aplicación de las RNA en este campo.
En la búsqueda de aplicaciones para la industria. Se puede citar, la investigación desarrollada por Casalino et. al. [1.11] donde se utiliza el modelado numérico (Método del Elemento Finito), las redes neuronales artificiales y los conjuntos difusos para determinar el mejor método de unión a través de soldadura por arco eléctrico y su posterior evaluación.
Li et. al. [1.12] presentan un método para identificar los defectos que produce un porta herramientas conforme se va descalibrando. Utilizando digitalización por laser, lógica difusa y redes neuronales para lograr este propósito.
Dini [1.13] establece una metodología para la predicción de la delaminación en el proceso de taladrado de fibras de vidrio reforzadas, para lograrlo utiliza dos RNA de retropropagación, una establece el nivel de daño y la otra indica el tamaño del defecto producido.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 13
artificiales. En éste estudio se interrelacionan dos variables, el material utilizado y los trabajadores involucrados en la producción. En este contexto se puede citar a Yarlagadda [1.15] que hace un estudio de los parámetros que pudieran afectar el moldeo por inyección, utiliza la velocidad y la presión involucradas en el proceso para entrenar dos tipos de redes neuronales artificiales. Los datos de entrenamiento se obtienen a partir de simulación numérica. Lázaro [1.16] propone una técnica con base en redes neuronales para clasificar las piezas producidas por fundición, en maquinables y no maquinables, considerando los datos obtenidos de una señal ultrasónica.
Muchas son las áreas donde las redes neuronales pueden ser de utilidad y ayudar a mejorar resultados en los procesos, no solo de producción también en la parte experimental y tener un buen nivel de confianza en los resultados obtenidos, como lo demuestra el análisis de las superficies de rodamientos sometidos a presión en flechas utilizando redes neuronales por Osman-Kurban [1.17]. En este desarrollo se muestra en forma experimental como se obtienen los datos de la distribución de las presiones sobre el rodamiento, a diferentes velocidades de trabajo y rugosidad en la superficie. Posteriormente, utilizando las redes neuronales, se optimizan los resultados para obtener la distribución real de la presión durante el proceso de lubricación.
En un documento presentado por Huber et. al. [1.18,1.19], se muestra una técnica para determinar la relación de Poisson, considerando la rigidez que se produce de la carga y descarga de un cuerpo. La ecuación que define la relación de Poisson puede ser invertida a través de dos RNA para identificar dicho parámetro con un alto nivel de precisión.
Artymiak et. al. [1.20] utilizan las redes neuronales para determinar las curvas de resistencia a la fatiga y limite de fatiga en especímenes que simulan componentes estructurales. Se muestra que este método es superior a los utilizados convencionalmente.
Seibi y Al-Alawi [1.21] emplean una RNA para predecir la resistencia promedio a la fractura de una aleación de aluminio. Involucran datos con base en la evaluación de valores críticos de la integral J, obtenidos en forma experimental. Además, exploran los efectos de la geometría de la grieta, temperatura y biaxialidad en la resistencia a la fractura.
Sablani [1.22] utilizan redes neuronales para calcular el coeficiente de fricción en tuberías, que transportan fluidos plásticos de Bingham, a través del número de Reynolds y la potencia efectiva de la bomba.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 14
evaluar la integridad estructural de marcos de carga, utilizados en infraestructuras civiles, a través de vibraciones libres inducidas por medidas de deformación. Utiliza una red neuronal para tal efecto y determina que el rango de precisión, de los resultados obtenidos, se encuentra dentro de 5%.
Kim et. al. [1.25] utilizó medidas de emisiones acústicas, en frecuencia cíclicas de carga de 1, 2 y 4 Hz, en una barra de acero estructural para determinar el factor de intensidad esfuerzos a través de una RNA con un arreglo 5-14-1, el desarrollo del modelo se usó para varios tipos de especímenes y condiciones cíclicas de carga.
El uso de la computadora e internet, permiten nuevos desarrollos como el propuesto por Chinnam y Mohan [1.26] que exponen un método en línea para estimar la confiabilidad (tiempo de vida útil) de los sistemas físicos, utilizan wavelets para facilitar examinar las señales degradadas en los dominios del tiempo y frecuencia (eliminar el ruido en la señal), mientras que la RNA se usa para reacomodar la señal recibida y estimar la vida útil del dispositivo. Guo [1.27] propone un método en línea para monitorear en tiempo real la deformación que produce una roladora. Utilizando una red neuronal, eliminan el ruido que recibe el sensor hecho de fibra óptica.
Si bien es cierto que las RNA ayudan a modelar, optimizar, reconocer patrones y en forma general a resolver problemas, también se debe mencionar que su diseño es un proceso heurístico. Algunos trabajos se han desarrollado para establecer un proceso metodológico concreto, entre ellos se puede mencionar el presentado por Staszewski [1.28] donde se muestra técnicas para el pre-procesamiento de datos que se utilizan en la detección de daño estructural en el dominio del tiempo. Siraj et. al. [1.29] muestran una técnica para mejorar la capacidad de generalización de una RNA a través de dos perceptrones discriminantes multicapa, estos últimos son construidos a partir de los patrones de prueba y entrenamiento. Kallassy [1.30] propone un método para diseñar una RNA a partir de un análisis de regresión y determinar el número óptimo de neuronas para un nivel de error deseado. Magoulas et. al. [1.31] mejora el algoritmo de retropropagación, enfocándose principalmente en el rango y características de convergencia. Yang et. al. [1.32] postula un nuevo algoritmo para el entrenamiento de perceptrones multicapa, la propuesta se fundamenta en la no inversión explicita de la información contenida en la matriz de Fisher.
Capítulo I: Antecedentes generales sobre las Redes Neuronales Artificiales.
Alejandro Luna Avilés 15
cada capa de sustrato. Otra aplicación geológica es presentada por Singh [1.34] al realizar un estudio de la vibración que se produce en el suelo debido a los procesos de excavación. Con ayuda de una red neuronal artificial plantea la posibilidad de predecir la magnitud (impacto adverso) de dicho fenómeno. Basheer [1.35] utiliza redes neuronales para caracterizar las propiedades mecánicas de muestras de suelo a través de procesos de histéresis, compara la efectividad de las teorías existentes y propuestas, además establece la posibilidad de generalizar los resultados obtenidos con la inserción de nuevos datos.
1.4. Antecedentes en la Localización y Clasificación de Defectos Utilizando Redes Neuronales Artificiales.
Una de las preocupaciones de la ingeniería se centra en la evaluación cuantitativa no destructiva de las fracturas y defectos en las estructuras y materiales utilizados en los procesos productivos. Achenbach [1.36] hace una revisión de las técnicas más importantes en este rubro y plantea el posible uso de la inteligencia artificial moderna, entre otros métodos, para la detección de fallas y análisis de fatiga. Como se mencionó con anterioridad, la QNDE es un conjunto de técnicas y metodologías utilizadas para evaluar la integridad estructural de un dispositivo. Para lograrlo emplea herramientas como ultrasonido, rayo laser, microscopios, etc. Una de las consideraciones más importantes en este tipo de desarrollos se fundamenta en el uso y construcción de modelos de simulación numérica (problema directo). Estos se utilizan principalmente como patrones de referencia, para la interpretación de datos experimentales y para reconocer características especificas (como propiedades mecánicas).
En ocasiones los datos obtenidos en forma experimental, por ejemplo los datos generados a través de las ondas de señales ultrasónicas colectadas con sensores, son difíciles de interpretar (discriminar entre datos útiles y ruido) en consecuencia se conocen los resultados finales pero no así las causas que dieron origen a estos (problema inverso). Es entonces cuando se debe aplicar un análisis inverso combinando las QNDE y las RNA.
A continuación se mencionan algunos documentos donde se mezclan técnicas numéricas, inteligencia artificial moderna y datos experimentales para la localización y detección de defectos.
![Figura 1.1. Neurona biológica con sus componentes [1.1].](https://thumb-us.123doks.com/thumbv2/123dok_es/4955119.74937/25.595.100.496.430.733/figura-neurona-biologica-componentes.webp)