INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA
MECANICA Y ELECTRICA
IMPLEMENTACIÓN DE UN CONTROLADOR UNIVERSAL
PARA CONVERTIDORES DE ALTA FRECUENCIA DE
CONMUTACIÓN
TESIS
QUE PARA OBTENER EL TITULO DE INGENIERO EN
COMUNICACIONES Y ELECTRÓNICA
PRESENTA
CHRISTIAN CASTRO MORALES
ASESORES
DR. MARTHA C. GALAZ LARIOS
DR. DOMINGO DE JESÚS CORTES RODRÍGUEZ
Índice general
1. Objetivos y justificación 1
1.1. Objetivos . . . 1
1.1.1. Objetivo general . . . 1
1.1.2. Objetivos específicos . . . 1
1.2. Justificación . . . 1
2. Introducción 3 3. Antecedentes 7 3.1. Convertidores CD-CD . . . 7
3.2. Diseño de convertidores . . . 8
3.2.1. Diseño del convertidor reductor o buck . . . 9
3.2.2. Diseño del convertidor elevador o boost . . . 10
3.2.3. Diseño del convertidor reductor-elevador o buck-boost . . . 12
3.2.4. Diseño del convertidor cuck . . . 13
4. Controlador 17 4.1. Control por Modos Deslizantes . . . 17
4.2. Controlador General para convertidores de CD-CD . . . 18
5. Implementación 23 5.1. Generador de pulsos con frecuencia y ciclo de trabajo variables . . . 23
5.1.1. Introducción . . . 23
5.1.2. Desarrollo . . . 23
5.1.3. Ensamble . . . 23
5.2. Construcción de un generador de referencias senoidales . . . 26
5.2.1. Introducción . . . 26
5.2.2. Desarrollo . . . 26
5.2.3. Ensamble . . . 27
5.3. Implementación del convertidor buck . . . 28
5.3.1. Diseño del convertidor . . . 29
5.3.2. Ensamble . . . 30
5.4. Implementación del convertidor boost . . . 31
5.4.1. Diseño del convertidor . . . 31
5.4.2. Ensamble . . . 32
5.5. Implementación del convertidor buck-boost . . . 34
5.5.1. Diseño del convertidor . . . 34
5.5.2. Ensamble . . . 35
5.6. Implementación del controlador universal . . . 36
5.6.1. Cálculo de los valores de los componenetes. . . 41
5.6.2. Ensamble . . . 43
6. Evaluación 45
6.1. Convertidor buck . . . 45
6.1.1. Simulación . . . 45
6.1.2. Implementación . . . 46
6.2. Convertidor boost . . . 52
6.2.1. Simulación . . . 52
6.2.2. Implementación . . . 54
6.3. Convertidor buck-boost . . . 57
6.3.1. Simulación . . . 57
6.3.2. Implementación . . . 57
6.4. Evaluación de resultados . . . 60
7. Conclusiones 63 A. Apéndice 67 A.1. “A class of easy-to-implement sliding-mode controllers with constant switching frecuency for power converters” . . . 67
Capítulo 1
Objetivos y justificación
1.1. Objetivos
1.1.1. Objetivo general
Evaluar si un solo circuito puede servir para controlar los convertidores cd-cd básicos con tan solo cambiar los valores de los componentes.
1.1.2. Objetivos específicos
Proponer un control por modos deslizantes el cual va a ser utilizado para controlar los convertidores básicos reductor (buck), elevador (boost) y reductor-elevador (buck-boost).
Implementación del controlador propuesto en un circuto impreso con circuitos integrados de uso común.
Evaluar el controlador propuesto en lazo cerrado con el convertidor reductor
Evaluar el controlador propuesto en lazo cerrado con el convertidor elevador
Evaluar el controlador propuesto en lazo cerrado con el convertidor reductor-elevador
1.2. Justificación
El interés por aprovechar mejor la energía eléctrica debido a motivos económicos y ecológicos motiva a emplear cada día aparátos mas eficientes, es decir que desperdicien menos energía. Por otra parte los nuevos dispositivos son menos tolerantes ante sobrecargas y deben ser alimentados dentro de un rango específico y de mínimas variaciones. Esto hace que los circuitos que los alimenten tengan especificaciones más restrictivas en comparación con los de antaño.
Conjuntamente con el desarrollo de nuevas topologías, se requiere de nuevos algoritmos de control, los cuales no necesariamente tienen que ser complejos en su implementación, por lo contrario, es conveniente y en ocasiones necesario que los esquemas de control sean sencillos de implementar.
Actualmente existes dos formas de manejar la energía eléctrica: el modo lineal y modo conmutado. Se sabe que el segundo método es mas eficiente que el primero. Por tal motivo en esta tesis se elige trabajar con este.
El no tomar en cuenta los aspectos prácticos de las aplicaciones hace que los controladores resulta en al-goritmos sumamente complejos para ser implementados mediante la electrónica comúnmente empleada para controlar los convertidores. Desde el punto de vista de la implementación, los algoritmos complejos tienen tie-nen como resultado la perdida de una de las mayores ventajas de los convertidores electrónicos: la confiabilidad derivada de la simplicidad de los circuitos.
Entonces el camino a seguir es crear controladores sencillos, fáciles de implementar, con mejor respuesta a diversos acontecimientos y si es posible, que sean económicos.
Existen diversas investigaciones que teóricamente ofrecen buenos resultados, y que valdría la pena im-plementarlas y evaluarlas. En [2] se desarrolla un estudio de una clase de control por modos deslizantes con frecuencia de conmutación constante para convertidores electrónicos fácil de implementar. La forma de verifi-car que esta propuesta cumpla con los resultados que teóricamente ofrece, es proponer un control por modos deslizantes, e implementarlo físicamente con circuitos disponibles actualmente y de fácil adquisición, ponerlo a prueba y evaluar los resultados obtenidos, con respecto a la rapidéz en la recuperación de la señal.
Capítulo 2
Introducción
Actualmente cualquier aparato eléctrico o electrónico, necesita ser alimentado por una fuente de energía, la cual tiene que ser regulada. La fuente pude ser de voltaje o de corriente (generalmente voltaje), en CD o CA.
La energía eléctrica se puede obtener por medio de la línea eléctrica, en baterías de diversos valores, en alternadores, etc. En ocasiones la energía eléctrica de que se dispone tiene cualidades distintas a las que se necesitan; esto ha llevado a investigar métodos para controlar la energía y sus cualidades. La ciencia que se encarga de esta área es la electrónica de potencia.
La electrónica de potencia es un campo multidisciplinario que se dedica a controlar la energía eléctrica de manera eficiente. Para manejar la energía de forma controlada existen dos metodos: el lineal y el conmutado, mostrados en la figura 2.1.
En el método lineal (figura: 2.1(a)) se tiene un elemento lineal en serie con la carga, de este modo la energía es dividida entre el elemento lineal y la carga los cuales al estar en serie se dividen el voltaje; al variar la impedancia del elemento lineal el voltaje que recibe la carga también cambia; por lo tanto el voltaje que recibe la carga puede ser controlado con la variación del elemento lineal; sin embargo, la energía que consume el elemento lineal es desperdiciada.
En el método conmutado (figura 2.1(b)), el elemento en serie con la carga es un interruptor. La energía que recibe la carga es controlada por el interruptor. En el caso ideal, la perdida de energía es nula. En la práctica las perdidas son mucho menores que en el método lineal.
En la actualidad el costo de la energía eléctrica va en aumento debido al encarecimiento de los hidrocarburos, necesarios para su obtención. Otro problema derivado de esto es la contaminación que producen, y por lo tanto su impacto ecológico. Por ese motivo es necesario evitar el desperdicio de la energía eléctrica. De ahí el objetivo principal de la electrónica de potencia, que es el realizar la conversión de energía de manera eficiente, con un número menor de componentes y una mayor fiabilidad.
En una conversión lineal, la eficiencia es mucho menor a la eficiencia en la conversión conmutada. Debido a que en comparación con el método lineal, el modo conmutado presenta un mayor ahorro de energía. En la
Fuente
Carga
(a) Método lineal
Fuente
Carga
(b) Método conmutado
electrónica de potencia sólo se utiliza el segundo.
Los convertidores electrónicos de potencia se pueden agrupar en 4 diferentes topologías según su funciona-miento: CD-CA, CA-CD, CA-CA y CD-CD.
Los convertidores CD-CD son dispositivos que transforman corriente directa de una tensión a otra, y son usados cuando se necesita una tensión diferente a la que se tiene. Debido a los efectos de conmutación, en los convertidores de CD-CD la energía eléctrica provista a su salida no se presenta estrictamente como CD; como sí lo es en un caso lineal. Al trabajar con el método conmutado se busca su eficiencia, pero también se busca obtener a la salida la señal mas parecida a la deseada, que generalmente suele ser de CD.
Los convertidores son diseñados a partir de sus especificaciones: voltaje de entrada, voltaje deseado a la salida y valor nominal de la carga. También se deben tomar en cuenta que el convertidor estará sujeto a per-turbaciones externas como cambios en la alimentación y carga, u otros problemas. En este caso se utilizan los controladores para asegurar la señal que se desea a la salida.
La energía que se obtiene a la salida del convertidor depende principalmente, aparte de su tipo, del ciclo de trabajo de su interruptor. En la práctica, también otros factores intervienen para obtener el voltaje deseado; como lo son las características reales de los diversos elementos usados para su construcción, las exigencias de la carga, y la capacidad de la batería para proveer corriente suficiente, además de diversas perturbaciones.
Un controlador es necesario para asegurar el voltaje deseado a la salida del convertidor, sin importar los factores descritos anteriormente. La tendencia en los convertidores de potencia es hacer controladores mas sen-cillos, que ofrezcan una mejor respuesta, que sean mas eficientes, que sean de menor tamaño y su construcción sea mas barata. Para que esto sea posible se está trabajando en el diseño de controladores que cumplan con estas características. La aparición de nuevos dispositivos electrónicos que pueden agrupar o simplificar eta-pas han permitido que los convertidores, junto con sus controladores eliminen o disminuyan problemas que se presentaban con los dispositivos anteriores.
Existen varios metodos para el control, uno de los metodos mas comúnmente usado es el control por modos deslizantes (sliding mode control). Este método hace que la señal controlada tienda hacia una señal de referencia. Este método es utilizado en esta tesis y se aborda mas adelante.
En esta tesis se propone la implementación de un controlador tipo PI por modos deslizantes, el cual pueda ser usado por cualquier convertidor CD-CD básico. Esta implementación es puesta a prueba para confirmar que realmente funcione como es esperado; para lo cual es necesario implementarla físicamente. Así mismo para provar el controlador es necesario equipo extra. El desarrollo del este equipo también es mostrado en el capitulo de 5, de igual manera se muestra el desarrollo de los convertidores usados y del controlador propuesto.
Para poner a funcionar los convertidores electrónicos en lazo abierto y comprobar su funcionamiento, se ne-cesita una señaluexterna de frecuencia fija y ciclo de trabajo variable para activar el switch de los convertidores. Con este propósito se realiza unGenerador de Pulsos con frecuencia y ciclo de trabajo variablespara probar el funcionamiento de los convertidores en lazo abierto ante diferentes frecuencias de conmutación y diferentes ganancias. Este generador de pulsos se realiza con un CI TL494 con la intención de poder ser utilizarlo mas adelante dentro delcontrolador universaldebido a su precisión, bajo costo, y a que presta otras características pueden servir para restringir su señal de salida.
Los convertidores CD-CA o inversores, pueden ser implementados al juntar dos convertidores CD-CD. Ave-ces es neAve-cesario que los inversores entreguen una señal senoidal pura, o lo mas cercana a ella. Ungenerador de referencias senoidales con amplitud y frecuencias variableses implementado para poner a prueba los conver-tidores junto con el controlador, y ver su respuesta al momento de seguir una señal senoidal. Es un generador sencillo y que permite variar fácilmente amplitud y frecuencia de la señal de salida, y servirá para poner a prueba los convertidores buck y boost que en ocasiones son usados para la realización de inversores. Los convertidores tendrán que seguir la referencia que este circuito proporciona.
La implementación de los convertidores es realizada de manera que se evita que el interruptor de los conver-tidores se encuentre en ambas posiciones al mismo tiempo. Por medio de la variación de una resistencia variable es posible decidir que tanto de tiempo muerto se desea tener entre la transición del switch.
Elcontrolador universales implementado de una forma sencilla y que permite integrarse a los convertidores fácilmente. Permite variar algunos parámetros que hacen mas fácil la sintonización y la evaluación.
5
deSimulinkdeMatlab. Las evaluaciones se hacen para los casos de:
encendido del convertidor
respuesta en estado estacionario
respuesta ante variaciones de carga
respuesta al momento de seguir una señal senoidal, para el caso de los convertidores buck y boost.
Capítulo 3
Antecedentes
En este capítulo se presentan las bases del diseño de los convertidores electrónicos de potencia. Se muestran los modelos conmutados de cada convertidor, que servirán para implementar mas adelante el controlador.
3.1. Convertidores CD-CD
Los convertidores CD-CD también conocidos como convertidores CD-CD de potencia de alta frecuencia o mas comúnmente por su nombre en ingles:“High switching frecuency DC-DC power converters”, son disposi-tivos que modifican el nivel de voltaje de CD.
En la figura 3.1 se muestran las 4 configuraciones básicas conocidas como:
ConvertidorBucko reductor
ConvertidorBoosto elevador
ConvertidorBuck−Boosto reductor-elevador
ConvertidorCuck
vin C
L 0 1
u(t)
R vC=z2 iL=z1
(a) El convertidor buck
vC=z2
vin C
L 1
0 iL=z1
u(t)
R
(b) El convertidor boost
vin L C
iL=z1 u(t)
vC=z2 R
0 1
(c) El convertidor buck-boost
vin
L1
iL
1=z1 iL2=z3
C2 R vC2=z4
L2
vC
1=z2
C1
u(t)
0 1
[image:13.595.120.487.513.714.2](d) El convertidor ´Cuck
Debido a que los convertidores son controlados por un interruptor, el voltaje generado a la salida del conver-tidor es un voltaje pulsante. Los demás elementos de los converconver-tidores forman un filtro pasabajos que permiten que a la salida se obtenga una señal promedio de la señal pulsante. Por medio de este filtro se eliminan las seña-les de alta frecuencia. Debido a que funciona como filtro pasabajos, se puede buscar que a la salida se obtenga una señal muy cercana a una constante de CD, u otra señal por debajo de la frecuencia de corte del filtro.
La ganancia de voltaje en estado estacionario a la salida del convertidor depende del ciclo de trabajoudel interruptor a una frecuencia constante para cada uno de los convertidores.
La ganancia en voltaje está definida como
g=V¯o Vin
donde ¯Voes el voltaje de salida en estado estacionario yVines el voltaje de entrada
Para determinar esta relación que llamamos ganancia se estudian los convertidores en estado estacionario. Cuando el ciclo de trabajoues constante.
La ganancia en voltaje es una de las características mas distintivas de cada convertidor, mas adelante dentro de la explicación de cada convertidor se muestran las ganancias en voltaje correspondientes.
3.2. Diseño de convertidores
Para elegir los valores adecuados para los elementos de un determinado convertidor se debe de tomar en cuenta que la conmutación del interruptor hace que tanto el voltaje en el capacitor como la corriente en el inductor presenten variaciones que alejen al convertidor de proporcionar una señal constante. En la figura 3.2 se muestran las variaciones debido a la conmutación, dondez1es la corriente en el inductor,z2es el voltaje en el capacitor, ¯z1es la corriente promedio en el inductor, ¯z2es el voltaje promedio en el capacitor,T es el periodo, tones el ciclo de trabajo. Aparte de la conmutación del interruptor se deben tomar en cuenta las exigencias que
demandaría la carga y las características de la señal deseada a la salida del convertidor. Para obtener los valores convenientes de los parametrosLyC, dentro de la explicación de cada convertidor se muestra como se pueden obtener sus valores mínimos.
0 1
z1 z2
t2
t1
t0
z11
z10 z21 z2
0
u
t ¯ z1
¯ z2
T
ton
3.2. DISEÑO DE CONVERTIDORES 9
3.2.1. Diseño del convertidor reductor o buck
También conocido como convertidor reductor, el convertidor buck, presenta un voltaje menor a la salida, con respecto al que se encuentra en la entrada. Su diagrama se muestra en la figura 3.1(a), del cual se obtienen las ecuaciones que expresan su comportamiento. Como se muestra en la figura,z1es la corriente en el inductor yz2es el voltaje en el capacitor. Los valores deVin,L,CyRse suponen para fines de análisis constantes. La
cargaRes desconocida.
Para encontrar las ecuaciones propias del circuito, primero se analiza el caso de cuando el interruptor de la figura 3.1(a) se encuentra en la posiciónu=0. En este caso el circuito funciona como en la figura 3.3.
Figura 3.3: convertidor buck cuando u=0.
De esta figura se obtienen las ecuaciones:
˙ z1=−z2
L (3.1a)
˙ z2=z1
C− z2
RC (3.1b)
Figura 3.4: convertidor buck cuando u=1.
Cuando el interruptor se encuentra en u=1, el circuito que resulta es el mostrado en la figura 3.4. Las ecuaciones (3.2) describen este circuito. En este caso el circuito está descrito por:
˙ z1=−z2
L + Vin
L (3.2a)
˙ z2=z1
C− z2
RC (3.2b)
combinando (3.1) y (3.2), resulta:
˙ z1=−z2
L + Vin
L u (3.3a)
˙ z2=z1
C− z2
RC (3.3b)
u∈ {0,1} (3.3c)
Ganancia
Como se ve en [1] la ganancia del convertidor esta dada por:
¯ Vo
Vin
=u¯ (3.4)
donde ¯ues el ciclo de trabajo promedio del interruptor, ¯Voes el voltaje de salida,Vines el voltaje de entrada.
Como 0<u¯<1 entonces se tiene queVo<VinDebido a esto el convertidor buck sólo puede proporcionar
a su salida un voltaje de menor amplitud, en comparación al que se encuentra en su entrada. La relación entre corriente en la carga (Io) y la corriente de entrada (Iin), está descrita
¯ Io
Iin
=1 ¯
u (3.5)
Se puede ver que el voltaje en la salida varia directamente proporcional con la corriente de entrada, e inversamente proporcional a la corriente de salida, haciendo que la potencia que entrega la batería o fuente a la entrada sea la que se consuma en la carga, ya que se supone que el convertidor no debe de desperdicia energía.
Se puede decir que un convertidor que reduce el voltaje y eleva la corriente.
Valores mínimos de los parametros L y C
Como se explica en [1] las ecuaciones que se usan para obtener los valores mínimos deCyLson
L>u¯
′Tz¯ 2
∆z1 (3.6a)
C>u¯
′2T2z¯ 2
2L∆z2 (3.6b)
donde:T es un periodo de conmutación,∆z2es el rizo de voltaje en la carga,∆z1es el rizo de corriente del inductor, ¯u′es 1−u¯, siendo ¯uel ciclo de trabajo promedio.
3.2.2. Diseño del convertidor elevador o boost
El convertidor boost o convertidor elevador presenta a su salida un voltaje mayor al de entrada. Al igual que en los otros convertidores, la ganancia en la salida depende del ciclo de trabajo del interruptor.
De la figura 3.1(b) se pueden deducir las ecuaciones que representan su comportamiento. Como se puede verz1es la corriente en el inductor yz2es el voltaje en el capacitor. Los valores deVin,L,Cy la cargaRse
suponen para fines de análisis constantes.Res desconocida.
Para un estudio mas sencillo, primero se analiza el circuito de la figura 3.1(b) cuando el interruptor se encuentra en la posiciónu=0. El circuito funciona como en la figura 3.5; de la cual se deducen las ecuaciones:
3.2. DISEÑO DE CONVERTIDORES 11
˙ z1=Vin
L − z2
L (3.7a)
˙ z2=z1
C− z2
RC (3.7b)
Figura 3.6: convertidor boost cuando u=1.
Cuando el interruptor se encuentra enu=1, el circuito que resulta se muestra en la figura 3.6, y las ecua-ciones que describen este circuito son:
˙ z1=Vin
L (3.8a)
˙
z2=−z2
RC (3.8b)
Al combinar (3.7) y (3.8) resultan las ecuaciones (3.9) que es el modelo conmutado o discontinuo del convertidor boost.
˙ z1=Vin
L − z2
L(1−u) (3.9a)
˙ z2=z1
C(1−u)− z2
RC, u∈ {0,1} (3.9b)
Ganancia
Como se ve en [1] la ganancia en voltaje del convertidor esta dada por:
¯ Vo
Vin
= 1 ¯
u′ (3.10)
donde ¯u′=1−u¯siendo ¯ues el ciclo de trabajo promedio del interruptor, ¯Voes el voltaje de salida,Vines el
voltaje de entrada. Que hace que
¯ Vo>Vin
es decir; el convertidor boost solo puede proporcionar voltajes mayores en la salida, que al encontrado en la entrada. La relación entre corriente en la carga (Io) y la corriente de entrada (Iin), está descrita por
¯ Io
Iin
Valores mínimos de los parámetros L y C
Las expresiones que determinan los valores mínimos deCyL[1] para el convertidor boost son
L>V∆inuT¯
z1 (3.12a)
C>uT¯ z¯2
R∆z2 (3.12b)
donde:T es un periodo de conmutación.∆z2es el rizo de voltaje en la carga.∆z1es el rizo de corriente del inductor y ¯ues el ciclo de trabajo promedio
3.2.3. Diseño del convertidor reductor-elevador o buck-boost
El convertidor buck-boost o reductor-elevador presenta a la salida un voltaje mayor o menor con polaridad invertida, al encontrado en la entrada. Su diagrama se puede ver en la figura 3.1(c), del cual se pueden encontrar las ecuaciones que expresen su comportamiento. De la imagen se puede ver quez1es la corriente en el inductor yz2es el voltaje en el capacitor. Los valores deVin,L,CyRse suponen para fines de análisis constantes. La cargaRes desconocida.
Para encontrar las ecuaciones que describen el circuito primero se analiza cuando el interruptor se encuentra en la posiciónu=0. En este caso el circuito funciona como en la figura 3.7.
Figura 3.7: convertidor buck-boost cuando u=0.
De la figura 3.7 se obtienen las ecuaciones:
˙ z1=−z2
L (3.13a)
˙ z2=z1
C− z2
RC (3.13b)
3.2. DISEÑO DE CONVERTIDORES 13
Cuando el interruptor esta enu=1, el circuito que resulta se muestra en la figura 3.8, y Las ecuaciones que describen este circuito son:
˙
z1=−Vin
L (3.14a)
˙
z2=−z2
RC (3.14b)
combinando (3.13) y (3.14), resulta
˙
z1=−Vin L u−
z2
L(1−u) (3.15a)
˙ z2=z1
C(1−u)− z2
RC, u∈ {0,1} (3.15b)
que es el modelo conmutado o discontinuo del convertidor buck-boost.
Ganancia
La ganancia en voltaje del convertidor buck-boost [1] esta dada por
¯ Vo
Vin
=−u¯ ¯
u′ (3.16)
La relación entre corriente en la carga (Io) y la corriente de entrada (Iin), está descrita por
¯ Io
Iin
=−u¯ ′ ¯
u (3.17)
Valores mínimos
Las expresiones que determinan los valores mínimos [1] deCyL,para el convertidor buck-boost son:
L>VinuT¯
∆z1 (3.18a)
C>uT¯ z¯2
R∆z2 (3.18b)
donde:T es un periodo de conmutación.∆z2es el rizo de voltaje en la carga.∆z1es el rizo de corriente del inductor y ¯ues el ciclo de trabajo promedio.
3.2.4. Diseño del convertidor cuck
El convertidor cuck al igual que el convertidor reductor-elevador presenta a la salida un voltaje mayor o menor al de entrada, con polaridad invertida. La diferencia es que el convertidor buck-boost esta formado por un inductor y un capacitor, y el cuck esta formado por dos pares de estos.
Del diagrama del convertidor cuck, que se puede ver en la figura 3.1(d), se pueden obtener las ecuaciones que describan su compotamiento a partir de esta.
Dondez1es la corriente en elL1,z2es el voltaje enC1,z3es la corriente enL2yz4es el voltaje enC2. Los valores deVin,L1,L2,C1,C2y la cargaRse suponen para fines de análisis constantes.Res desconocida.
Para encontrar las ecuaciones que describen al circuito de la figura 3.1(d), primero se analiza cuando el interruptor se encuentra en la posiciónu=0; en este caso el circuito funciona como en la figura 3.9.
Figura 3.9: convertidor cuck cuando u=0.
˙ z1=Vin
L1 − z2
L1 (3.19a)
˙ z2=z1
C (3.19b)
˙ z3=−z4
L2 (3.19c)
˙ z4= z3
C2− z4
RC2 (3.19d)
Figura 3.10: convertidor cuck cuando u=1.
cuando el interruptor se encuentra enu=1, el circuito que resulta es el mostrado en la figura 3.10. Y las ecuaciones son:
˙ z1=Vin
L1 (3.20a)
˙ z2= z3
C1 (3.20b)
˙
z3=−z2 L2−
z4
L2 (3.20c)
˙ z4= z3
C2− z4
RC2 (3.20d)
3.2. DISEÑO DE CONVERTIDORES 15
˙ z1=Vin
L1−(1−u) z2
L1 (3.21a)
˙
z2= (1−u)z1 C1+u
z3
C1 (3.21b)
˙
z3=−uz2 L2−
z4
L2 (3.21c)
˙ z4= z3
C2− z4
RC2, (3.21d)
u∈ {0,1} (3.21e)
Ganancia
La ganancia en voltaje del convertidor cuck [1] esta dada por ¯
Vo
Vin
=−u¯ ¯
u′ (3.22)
La relación entre corriente en la carga (Io) y la corriente de entrada (Iin), está descrita por
¯ Io
Iin
=−u¯ ′ ¯
u (3.23)
Valores mínimos
Las expresiones que determinan los valores mínimos de los parámetrosC1,C2,L1yL2,para el convertidor cuck son:
L1>(Vin+
¯ z4
¯ u)
¯ u′T
∆z1 (3.24a)
C1>uT¯ z¯4
R∆z2 (3.24b)
L2>u¯ ′Tz¯
4
∆z3 (3.24c)
C2>2 ¯u ′Tz¯
4
R∆z4 (3.24d)
Capítulo 4
Controlador
En la actualidad existen diversas técnicas de control. Una de las mas usadas es el control por modos desli-zantes. Esta técnica de control es la usada en la presente tesis para los convertidores de CD-CD.
Como se ha mencionado en capítulos anteriores, un convertidor CD-CD trata de presentar a la salida del convertidor un voltaje constante de CD desde el momento en el que se enciende hasta el momento en que se apaga sin importar cambios en la carga o en la entrada del convertidor.
Al analizar los convertidores en lazo abierto se observa que existe un transitorio al momento de arrancar el convertidor. Esta etapa transitoria se encuentra en todos los convertidores de CD-CD y depende tanto del valor de los elementos del convertidor como de la carga y la ganancia del convertidor. La variación que se presenta a la salida del convertidor puede ser tan grande que es posible que la carga sufra daños por sobrealimentación. En el momento que la carga es cambiada por una de otro valor se presenta otro cambio en el voltaje de salida del convertidor. En ciertos casos esto no puede ser permitido, por tal motivo son usados los controladores. Los controladores se encargan de verificar que a la salida del convertidor se obtenga la señal deseada y que esta no tenga variaciones; y si esto sucede, el controlador tiene que hacer que el voltaje a la salida del convertidor se acerque lo mas posible a la señal deseada.
Actualmente existe gran número de técnicas de control que trabajan sobre éste problema, aunque algunas puedan llegar a ser difíciles de implementar. También es común combinar diversas técnicas para obtener mejores resultados. Aquí se presenta un control basado en modos deslizantes donde se combina con técnicas PI para crear la superficie deslizante. Se elige este tipo de control debido a que generalmente son robustos.
En este cápitulo se da una pequeña explicación del control por modos deslizantes y se desarrolla el control con el que se trabaja en esta tesis. Este controlador debe funcionar para los convertidores buck, boost y buck-boost.
4.1. Control por Modos Deslizantes
En teoría de control, el control por modos deslizantes es un tipo de control de estructura variable donde la dinámica de un sistema no linear es alterado atraves de la aplicación de un interruptor de alta frecuencia (high-frecuency switching control). Este es un esquema de control de retroalimentación de estados donde la retroalimentación no es una función continua del tiempo.
El esquema del control toma los siguientes pasos:
1. Seleccionar una o múltiples superficies deslizantes tal que la trayectoria del sistema muestre el compor-tamiento deseado cuando se reduce su superficie.
2. Encontrar las ganancias de retroalimentación tal que la trayectoria del sistema intersecte y se mantenga en la superficie deslizante.
Considere un sistema no lineal descrito por:
˙
x(t) =f(x,t) +B(x,t)u(t), x∈Rn,B∈R(n×m) (4.1) para la existencia de una única solución de la ecuación, asumimos que las funciones f(...) y B(...) son continuas y suficientemente lisas.
La superficie deslizante es de dimensiones(n−m)dadas por
σ(x) = [σ1(x), ...,σm(x)]T=0,σ(x)∈R(n−m) (4.2)
Laσ(x)es llamada“switching function”. Entonces la parte vital del diseño de VSC (Control de Estructura Variable) es elegir una ley de control tal que el modo deslizante exista y se dirija haciaσ=0.
El principio del control por modos deslizantes es obligar forzosamente el sistema, por una estrategia de control conveniente, a mantener la superficie deslizante donde el sistema ofrece los valores deseados. Cuando el sistema es forzado por el control deslizante para mantenerse en la superficie deslizante, la dinámica del sistema está gobernada para reducir el orden del sistema obtenido de 4.2.
Para forzar los estados del sistema para satisfacerσ=0, uno debe asegurar que el sistema es capaz de llegar al estadoσ=0 desde cualquier condición inicial y mantenerσ=0, para que la acción del controlador sea capaz de mantener el sistema enσ=0.
El control por modos deslizantes posee características que lo hacen muy conveniente para el control de convertidores electrónicos. Algunas de sus características son:
En general son robustos.
En el análisis de sistema controlado por modos deslizantes se debe considerar la discontinuidad del con-trolador, en el caso de los convertidores, la conmutación de los interruptores se considera de manera directa en el análisis.
El control equivalente de un control por modos deslizantes es aproximadamente igual al ciclo de trabajo, por lo tanto se toma en cuenta en forma indirecta la saturación de ciclo de trabajo.
El control equivalente de un controlador por modos deslizantes, en general es una función no lineal del estado aún para superficies lineales (considerando , que el sistema es no lineal), así el ciclo de trabajo de un control por modos deslizantes varía en forma no lineal.
En el control utilizado en en este trabajo se usan los modelos discontinuos del convertidor buck.
4.2. Controlador General para convertidores de CD-CD
El Controlador General para Convertidores de CD-CD presentado en esta sección controla el voltaje la salida de un convertidor de CD-CD, tomando como guía una referencia de voltaje. Este control se basa en la idea de controlar el voltaje de salida del convertidor por medio del manejo en la corriente del inductor. Para ver con mas claridad esto, se analizan las ecuaciones que representan al convertidor buck.
˙ z1=−z2
L + Vin
L u (4.3a)
˙
z2=−z2 RC+
z1
C (4.3b)
u∈ {0,1}
El diseño del control, se inicia suponiendo que el voltaje ˙z2se controla por medio de la corrientez1en lugar deu. Esta idea se basa en que el sistema
˙
4.2. CONTROLADOR GENERAL PARA CONVERTIDORES DE CD-CD 19
se puede controlar mediante
v=kpe+ki
Z
edt (4.5)
dondeees el error (VRe f−Vout), las constanteskpykison desconocidas por el momento.
Se puede ver que (4.4) es igual a (4.3b), sí;
a= 1
RC (4.6)
b= 1
C (4.7)
x=z2 (4.8)
v=z1 (4.9)
lo que significa que se puede usarz1 para controlarz2. Siz1 se considera como una variable que se puede controlar, se puede obtener unaz2 que se desee. A estaz1se le da el nombre dez1r. Entonces este control
ficticio se puede expresar en la ecuación
v=z1r=kpe+ki
Z
edt (4.10)
Después se busca diseñarude tal manera que
z1−→z1r (4.11)
de acuerdo a la teoría de control por modos deslizantes unauque logra esto es:
u=
(
0 σ<0
1 σ>0 (4.12)
donde
σ=z1−z1r (4.13)
Note que la lógica de conmutación del interruptoru, intenta hacer queσ=0. Comoσestá dado por (4.13), entonces (4.12) hace que
z1−→z1r (4.14)
sustituyendoz1rdada por (4.10) en (4.13), se obtiene
σ=z1−Kpe−ki
Z
e dt (4.15)
que junto con (4.12) determina el control que se va a utilizar
Para encontrar los valores dekpykien (4.10) se hace de la misma manera que se diseñaría (4.5) para (4.4).
Así se busca la función de transferencia de (4.4) que resulta
X(s) V(s)=
b
s+a (4.16)
Por otra parte, la función de transferencia del controlador (4.5) resulta
V(s) E(s)=kp+
ki
s (4.17)
donde:e=VRe f−Voo el error,kpykison constantes que deben ser obtenidas.
Figura 4.1: Sistema lineal controlado por un PI
Reduciendo el sistema de la figura 4.1 se obtiene la ecuación 4.18; la cual es la función de transferencia del sistema
X(s) E(s) =
bkps+bki
s2+ (a+bkp)s+bki
(4.18)
Una vez que se tiene la función de transferencia del sistema en lazo cerrado se buscan los valores parakpy
kique ofrezcan una respuesta más rápida sin desestabilizar el sistema. Se deben de buscar los valores dekpyki
que hagan que las raíces del denominador de la función de transferencia, se encuentren más a la izquierda del eje imaginario y más cercano al eje real, en el plano(Re(s), Im(s)). Un procedimiento similar se puede emplear para el resto de los convertidores, ya que la ecuación del voltaje de salida es similar para los 4 convertidores, lo que significa que en todos los casosa=RC1,b=C1 o en el caso del cucka=RC12 b=C12. La corriente del inductorz1,z1(1−u)oz3para cada caso, es substituida por el controlv. El voltaje de salida en cada convertidor se sustituye porx.
A continuación se da un ejemplo para encontrar valores dekiyKp. Suponga que tenemos los valores para
L=650µH,C=10µF,R=25Ω,Vin=10 yVout=20 para el convertidor. Como sabemosa=RC1 yb=C1.
Los polos de (4.18) se obtienen de las raices del denominador
s2+ (a+bkp)s+bki=0
las cuales están dadas por
r=−(a+bkp)±
p
(a+bkp)2−4(bki)
2 Para obtener raices reales negativas se tiene que cumplir
(a+bkp)2
4b ≥ki
Se propone unakp, y obtenemos lakimayor posible que evita raices complejas. Los valores dekpykimas
grandes aceleran la respuesta del sistema, sin embargo si se presentan variaciones en la carga que alejen las raices del eje real, se lleva al sistema a un estado de inestabilidad. Para demostrarlo se obtienekimáximo para
los valores deCyRdados y se proponekp=0.1.
El valor que se obtiene eski=98. La respuesta del sistema se muestra en la figura 4.2. Al cambiar la carga
4.2. CONTROLADOR GENERAL PARA CONVERTIDORES DE CD-CD 21
0 1 2 3 4 5
x 104 0
5 10 15 20 25
Z
2
Z1
V
in
Figura 4.2: respuesta del sistema conkppropuesta ykimáxima para obtener raices reales.
0 1 2 3 4 5 6 7 8 9 10 x 104 0
5 10 15 20 25 30 35 40
Z
2
Z
1
V
in
Capítulo 5
Implementación
En este capítulo se incluye la implementación de diversos circuitos que fueron estudiados y usados para el diseño y la prueba de los convertidores. Asimismo se presenta la implementación de los convertidores y el controlador puestos a prueba.
5.1. Generador de pulsos con frecuencia y ciclo de trabajo variables
5.1.1. Introducción
En el desarrollo de convertidores de CD-CD es conveniente contar con un generador de pulsos en los que se pueda modular la frecuencia y el ciclo de trabajo. Contar con este dispositivo permite evaluar al convertidor bajo distintas condiciones de operación. Mientras mas rápida sea la conmutación de los interruptores, a la salida del convertidor se obtiene un menor rizo de voltaje y corriente, lo cual es muy deseable. La frecuencia de conmutación de los interruptores depende de las características reales, de los diversos elementos que son usados como interruptores en un convertidor de potencia.
En este capítulo se presenta el diseño de un generador de pulsos en en el que es posible variar la frecuencia y el ciclo de trabajo de dichos pulsos La sencillez y la confiabilidad son características que se desean en todos los circuitos. Al diseñar este generador de pulsos se pensó en ambas.
5.1.2. Desarrollo
Una manera muy sencilla de construir un generador de pulsos con frecuencia y ciclo de trabajo variables es utilizar el integradoT L494 [4]. Este CI es un modulador por ancho de pulso (PWM) y necesita de pocos elementos externos para su funcionamiento. Dicho circuito ofrece opciones para el bloqueo de la señal o para el manejo de esta. A continuación se explica un poco de este circuito.
En la figura 5.1 se muestra un diagrama para que elT L494 proporcione una señal cuadrada, variable en frecuencia y ciclo de trabajo. La resistencia variable conectada al pin 6 del CI, sirve para variar la frecuencia de oscilación a la salida, con la resistencia y capacitor propuestos. El rango de frecuencia empieza en los 13Khz, y llega hasta aproximadamente los 260Khz. La resistencia variable conectada al pin 3 se encarga de controlar el ciclo de trabajo del PWM. El rango de variación del ciclo de trabajo empieza en el 0 % y termina como máximo hasta el 89 %. En Los pines 9 y 10 del CI se encuentra la salida directa de la señal.
5.1.3. Ensamble
Para armar el generador de pulsos se utilizó el siguiente material:
Figura 5.1: Diagrama PWM
1 capacitor de 0.01µF 1 capacitor de 0.1µF 1 resistor de 1KΩ 2 jumpers 10x02MTA
La placa es un diseño hecho con el programa Eagle 4.16 y se muestra en la figura 5.2. La distribución de los elementos del circuito impreso se observa en la figura 5.3
5.1. GENERADOR DE PULSOS CON FRECUENCIA Y CICLO DE TRABAJO VARIABLES 25
5.2. Construcción de un generador de referencias senoidales con
ampli-tud y frecuencias variables
5.2.1. Introducción
El inversor es un circuito que convierte la energía de CD a CA, generalmente en una señal sinusoidal de 60 Hz y 120V RMS, pero esta puede variar. Para que el inversor pueda realizar su función es necesaria una referencia. Dicha referencia no es más que una senoide de menor amplitud y potencia que la deseada a la salida. En este capítulo se propone una forma útil y sencilla de realizar un generador de onda senoidal de amplitud y frecuencia variables. Este generador será utilizado para proporcionar una referencia al controlador general implementado en esta tesis
5.2.2. Desarrollo
La base del circuito es el integradoICL8038, mostrado en la figura 5.4, el cual es un generador de funciones. En el pin 2 de este CI, se encuentra la salida de la señal seno. La frecuencia de la señal se controla por medio de las resistencias conectadas a los pines 4 y 5, y el capacitor conectado al pin 11. La relación de las resistencias R1 yR2 afecta el tiempo durante el cual la señal es positiva, y en el cual es negativa. (En una señal seno, el tiempo en el cual la señal es positiva, es igual al tiempo en que es negativa). Por tal motivo se usan resistencias de precisión iguales paraR1 yR2. La resistencia variableR5 sirve para variar la frecuencia de la señal seno.
El rango de frecuencia que se obtiene, con la combinación de resistencias y capacitor usados, empieza desde los 37Hz y puede ser variado hasta los 413Hz. La señal seno que se obtiene del pin 2 delICL8038 es fija, de 6V pico-pico.
Figura 5.4: Circuito Integrado ICL8038
5.2. CONSTRUCCIÓN DE UN GENERADOR DE REFERENCIAS SENOIDALES 27
Figura 5.5: Generador de onda senoidal de amplitud y frecuencia variable: diagrama
5.2.3. Ensamble
El material necesario para armar el circuito es el siguiente:
1 CI ICL8038CC 1 CI TL082 1 trimpots de 10KΩ 1 trimpots de 100KΩ 1 capacitor de 0.47µF
2 resistores de precisión de 1KΩ 1 resistor de 4.7KΩ
1 resistor de 15kΩ 1 jumpers 10X02MTA 1 jumpers 10X03MTA
El circuito impreso esta hecho con el programa Eagle 4.16 y es mostrado en la figura 5.6. Los elementos están distribuidos como se muestra en la figura 5.7.
.
Figura 5.7: Generador de onda senoidal de amplitud y frecuencia variable: distribución
5.3. Implementación del convertidor buck
La implementación del convertidor buck se realiza como se muestra en la figura 5.8.
u u
Figura 5.8: Implementación del convertidor buck
Con el interruptor formado por dos transistores y dos diodos. La señalues aplicada al transistorT1y una señal(1−u)que llamamosu′, es aplicada al transistorT2. Al hacerlos trabajar complementariamente, se simula un interruptor de dos posiciones.
Una velocidad de respuesta lenta en los transistores puede hacer que el interruptor que se intenta simular se encuentre en ambas posiciones. Para asegurar que esto no suceda se agregan 4 amplificadores operacionales permite dar un tiempo muerto entre el cambio de los interruptores. Esto genera un tiempo muerto entre el tiempo que están encendidos los transistores el cual se puede ver en la figura 5.9 para los transistoresT1yT2. El circuito que hace esto se ve en la figura 5.10.
Q
t
12
Q
t
2 2Figura 5.9: Representación de las señales con tiempo muerto
5.3. IMPLEMENTACIÓN DEL CONVERTIDOR BUCK 29
−
+
− +
−
+
−
+
U
U
U
U 10k 10k
1K
1K 1K
1K
5K 1.9K
10k 1nF
1nF
u u’ u
1
2
3
4
Vcc
Vcc
Vcc Vcc
Vcc
Figura 5.10: Circuito generador de señales con tiempo muerto
señalesuyu′a los transistores, siendoupara el transistorT1yu′para el transistorT2. La forma en que elCI IR2110 se implementa se muestra en la figura 5.11
Figura 5.11: Implementación del convertidor buck con el IR2110
5.3.1. Diseño del convertidor
Los parametros de diseño del convertidor buck que va a ser puesto a análisis son los siguientes:
Vin 20Volts
Vout 10Volts
F 30kHz
Rizo máximo de voltaje a la salida 0.5V Rizo máximo de corriente en el inductor 0.5A
R 25Ω
¯
use obtiene de (3.4) en la cual se despeja ¯uquedando como
¯ u=Vo
Vin
sustituyendoVoyVin
¯ u=10
20 ¯ u=0.5
Sustituyendo las especificaciones de la tabla en la primera ecuación de (3.6) para el calculo del inductor queda como
L>0.5∗ 1 30000∗20
0.5
L>666µHy y para calcular el capacitor queda se utiliza las segunda ecuación,
C>0.5 2∗ 1
30000 2
∗20 2∗666e−6∗0.5
C>8.35µF por lo que se elige aC=10µF
5.3.2. Ensamble
El material que se utiliza para ensamblar el convertidorBuckque se desarrolló es el siguiente:
Amplificador operacional cuatruple LM339 CI IR2110
2 Transistor MOSFET IRF540 2 Diodos MUR810
Diodo 1N4007 Diodo MUR410 Inductor de 650µF
Capacitor electrolítico de 10µF 2 capacitores cerámicos de 1nF capacitor mkp 0.47µF
capacitor mkp 1µF
2 capacitores de tantalio.(ruido) 4 resistencias de 1KΩ
3 resistencia de 10KΩ resistencia de 1.9Ω resistencia variable de 5kΩ 5 jumpers 10x02MTA
3 conectores 20 Ampers para la entrada, salida e inductor.
5.4. IMPLEMENTACIÓN DEL CONVERTIDOR BOOST 31
.
Figura 5.12: Convertidor Buck: circuito impreso
Figura 5.13: Convertidor Buck: distribución
5.4. Implementación del convertidor boost
El convertidor boost se implementa de una forma parecida a lo que se realiza con el convertidos buck. Se usa el mismo circuito de la figura 5.10 para evitar que los dos transistores estén encendidos al mismo tiempo y crear la señal complementariau′. Para suministrar el disparo a los transistores se usa elCI IR2110 y se une al convertidor boost como se muestra en la figura 5.14
5.4.1. Diseño del convertidor
Los parametros de diseño del convertidor boost que va a ser puesto a análisis son los siguientes:
Vin 10Volts
Vout 20Volts
F 30kHz
Rizo máximo de voltaje a la salida 0.25V Rizo máximo de corriente en el inductor 0.25A
R 25Ω
Figura 5.14: Implementación del convertidor boost con el IR2110
¯
use obtiene de (3.10) en la cual se despeja ¯uquedando como
¯
u=1−Vin Vo
sustituyendoVoyVin
¯
u=1−10 20 ¯ u=0.5
Sustituyendo las especificaciones de la tabla en la primera ecuación de (3.12) para el calculo del inductor queda como
L>10∗0.5∗ 1 30000 0.25 L>666µHy y para calcular el capacitor queda como
C>0.5∗ 1 30000∗20 25∗0.25 C>50µF
5.4.2. Ensamble
El material que se utiliza para ensamblar el convertidorBoostque se desarrolló es el siguiente:
Amplificador operacional cuatruple LM339 CI IR2110
2 Transistor MOSFET IRF540 2 Diodos MUR810
Diodo 1N4007 Diodo MUR410 Inductor de 650µF
5 Capacitores electrolíticos de 10µF 2 capacitores cerámicos de 1nF capacitor mkp 0.47µF
5.4. IMPLEMENTACIÓN DEL CONVERTIDOR BOOST 33
2 capacitores de tantalio.(ruido) 4 resistencias de 1KΩ
3 resistencia de 10KΩ resistencia de 1.9Ω resistencia variable de 5kΩ 5 jumpers 10x02MTA
3 conectores 20 Ampers para la entrada, salida e inductor.
El circuito impreso está hecho con el programaPCB paraKubuntuy se muestra en la figura 5.15, y la distribución de los elementos se muestra en la figura 5.16
.
Figura 5.15: Convertidor Boost: circuito impreso
5.5. Implementación del convertidor buck-boost
Para ser implementado el convertidor Buck-Boost de la figura 3.1(c) es necesario hacerle algunos ajustes, los cuales deben permitir que elinterruptorpueda ser implementado. Dos formas de las que se puede implementar con losCI disponibles son los de la figura 5.17. El que mas conviene para los propósitos de esta tesis es el 5.17(a). Con esta implementación se puede usar la misma metodología para crearu′ y evitar que ambos transistores se encuentren encendidos al mismo tiempo. La diferencia se encuentra a la salida del convertidor, la cual no se encuentra referenciada a tierra.
(a) Buck-Boost 1 (b) Buck-Boost 2
Figura 5.17: Modos de implementación del convertidor buck-boost.
La figura 5.18 muestra alCI IR2110 que aplica a los transistores la señaluyu′respectivamente.
Figura 5.18: implementación del convertidorbuck−boostcon el IR2110
5.5.1. Diseño del convertidor
Los parametros de diseño del convertidor buck-boost que es puesto bajo análisis son los siguientes:
Vin 10Volts
Vout 10Volts
F 30kHz
Rizo máximo de voltaje a la salida 0.25V Rizo máximo de corriente en el inductor 0.25A
R 25Ω
Para calcular los valores del inductor y capacitor se usa la tabla anterior y las formulas (3.18). ¯
use obtiene de (3.16) en la cual se despeja ¯u. Debido a las modificaciones hechas al convertidor, con lo que no invierte la polaridad,use encuentra con
¯
u= 1
1+Vin
5.5. IMPLEMENTACIÓN DEL CONVERTIDOR BUCK-BOOST 35
sustituyendoVoyVin
¯
u= 1
1+1010
¯ u=0.5 y como
¯
u′=1−u¯
¯ u′=0.5
Sustituyendo las especificaciones de la tabla en la primera ecuación (3.18) para el calculo del inductor, queda
L>10∗0.5∗ 1 30000 0.25 L>666µHy y para calcular el capacitor queda como
C>0.5∗ 1 30000∗10 25∗0.25 C>45µF por lo que se elige aC=50µF
5.5.2. Ensamble
El material que se utiliza para ensamblar el convertidorbuck−boostque se desarrolló es el siguiente:
Amplificador operacional cuatruple LM339 CI IR2110
2 Transistor MOSFET IRF540 2 Diodos MUR810
Diodo 1N4007 Diodo MUR410 Inductor de 650µF
5 Capacitores electrolíticos de 10µF 2 capacitores cerámicos de 1nF capacitor mkp 0.47µF
capacitor mkp 1µF
2 capacitores de tantalio.(ruido) 4 resistencias de 1KΩ
3 resistencia de 10KΩ resistencia de 1.9Ω resistencia variable de 5kΩ 5 jumpers 10x02MTA
3 conectores 20 Ampers para la entrada, salida e inductor.
.
[image:42.595.216.394.118.256.2]Figura 5.19: Convertidor Buck Boost: circuito impreso
Figura 5.20: Convertidor Buck Boost: distribución
5.6. Implementación del controlador universal para convertidores
elec-trónicos de potencia
La implementación delControlador Universalparte de la expresión (4.15). El controlador debe de permitir manejar las señales procesadas de una manera conveniente para los CI que existen actualmente. Debido a sus límites y características es necesario que los valores que se obtienen del convertidor (generalmente grandes) sean reducidos a valores que permitan a los CI operar de manera correcta. Es conveniente que las señales del controlador sean 10 veces menor a las encontradas en el convertidor.
Debido a que se prefiere que los elementos que se usen para implementación sean comunes, se usan ampli-ficadores operacionales para representar la ecuación del controlador.
En el control por modos deslizantes existe la característica que los controladores tienden a conmutar el interruptor de los controladores a una frecuencia infinita. Esto es un problema al momento de la implementación debido a que no existen CI que conmuten a una frecuencia infinita. De ahí la necesidad de mantener fija una frecuencia de conmutación. Para cumplir con este propósito en la implementación presentada se utiliza un bloque PWM.
5.6. IMPLEMENTACIÓN DEL CONTROLADOR UNIVERSAL 37
Figura 5.21: implementación del controlador universal con un bloque PWM, dispuesto para el convertidor buck
se implementa como en la figura 5.22 dondeV L1 yV L2 corresponden a los nodos donde se conecta el inductor, siendoV L1 quien tiene contacto con+Vin. En ambos casos paraRsg,Rk pyRkise utilizan resistencias variables,
lo cual facilita la sintonización o ajuste del controlador. El CI utilizado en el bloque PWM es un CIT L494CN. Las resistencias variables utilizadas en esta implementación tienen las siguientes funciones.
Rsgpermite ajustar la relación entre el voltaje de referencia y el voltaje de salida del convertidor.
Rkipermite variar entre un rango de valores para lakidel controlador.
Rk ppermite variar el valor para lakpdel controlador.
Rs f sirve para establecer el máximo de ciclo de vida útil deu.
Para explicar con mas detalle la implementación del controlador propuesta, a continuación se explica cada etapa de la figura 5.22 y la ecuación matemática que implementan. Para el caso de la figura 5.21 cada etapa es la misma, con la diferencia de que a la salida se obtiene la ecuación (4.15) invertida en polaridad (multiplicada por−1).
Se sabe quee=Vre f−Vout, pero se requiere obtener−e, este se obtiene multiplicamosepor−1, lo cual da
Figura 5.22: implementación del controlador universal con un bloque PWM, dispuesto para el convertidor boost y buck-boost
representa es .
−e=Vout
(R
a1+Ra2)Rsg
(Ra3+Rsg)Ra1
−Vre f
Ra2 Ra1
(5.1)
En el caso queRa1,Ra2,Ra3yRsgsean iguales se cumple−e=Vout−Vre f,
La figura 5.24 presenta un amplificador operacional en una configuración de inversor, la cual permite obtener una ganancia deseada. Esto es aprovechado para representar akp. La expresión que representa a esta figura es
la siguiente.
Kpe=−(−e)
Rk p
Rb3
(5.2)
Se observa claramente que la relación entreRk p yRb3representa akp. Eligiendo los valores adecuados para
estas resistencias se puede obtener una gran cantidad de valores parakp. Aquí se proponeRk p variable para
permitir que se pueda cambiar esta variable para ajustar el controlador para distintos convertidores. La corriente en el inductor esta dado por la ecuación
IL=
1 L Z
5.6. IMPLEMENTACIÓN DEL CONTROLADOR UNIVERSAL 39
Figura 5.23: Forma de implementación para obtener el error negativo−e
Figura 5.24: Forma de implementación para obtener el erroremultiplicado por una constanteKp
dondeVL1esVinpara el caso del boost, yuVinpara el buck-boost; yVL2esVout(1−u)para el boost yGNDpara
el buck-boost.
La figura 5.25 es nuevamente un diferenciador; en este caso se usa para obtenerVL1−VL2y su expresión es
VL=VL1
(R
a5+Ra6)Ra8 (Ra7+Ra8)Ra5
−VL2
Ra6 Ra5
(5.3)
siRa5,Ra6,Ra7yRa8 son iguales; a la salida del operacional se encuentra el voltaje a través del inductor que mas adelante es usado para calcular la corriente en el inductor.
La figura 5.26 muestra un amplificador operacional configurado como integrador, y a la vez sumador inver-sor. Configurado de esta manera se obtiene a la salida una estimación de la corriente en el inductor y la integral del error por la constanteki. La expresión que representa a la salida del operacional del diagrama de esta figura
es la siguiente:
− 1
CRb1 Z
(VL1−VL2)dt+
1 CRki
Z
e dt (5.4)
de esta ecuación podemos buscar queCRb1sea el valorLde la inductancia de la bobina y queCR1ki sea el valor dekipara el controlador. Al sustituir las variables la expresión queda
−1 L Z
(VL1−VL2)dt+ki
Z e dt
que es lo mismo que
−z1+ki
Z e dt
[image:45.595.240.374.556.717.2]Figura 5.26: Forma de implementación para obtener la corriente en el inductor y la integral del error porke.
Figura 5.27: Forma de implementación para obtener la ecuación del control propuesto
De la figura 5.24 se obtiene el error proporcional y de la figura 5.26 se obtiene la integral del error porki
menos la corriente del inductor. Si estos resultados se suman y se invierten se obtiene la ecuación de control (4.15). La figura 5.27 muestra un amplificador operacional configurado como sumador inversor, en la cual a su salida se obtiene
z1−kpe−ki
Z e dt
que es (4.15).
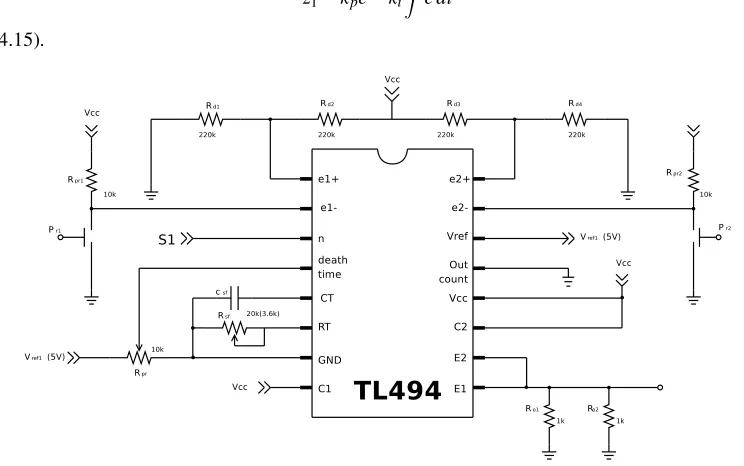
Figura 5.28: Forma de implementación del PWM del control
Como se ha mencionado, al controlador se le agrega un PWM el cual generauque se aplica al convertidor que se va a controlar. La figura 5.28 muestra la implementación de un PWM con el circuitoT L494 como núcleo. Rdxjunto conRpr1,Rpr2y Prx sirven para cancelaru, es decir, la salida del PWM es nula. La señalσ que es
5.6. IMPLEMENTACIÓN DEL CONTROLADOR UNIVERSAL 41
útil del PWM.Rs f es una resistencia variable que nos permite cambiar la frecuencia de conmutación del PWM.
Rs f yCs f determinan la frecuencia de conmutación del PWM. Por tal motivo se escogen valores que permitan
oscilar el PWM alrededor de 30KHzque es una frecuencia de oscilación comúnmente usada para convertidores electrónicos de potencia. EnE1 yE2 se encuentra la salida de la señaludel PWM.
5.6.1. Cálculo de los valores de los componenetes.
Como se puede ver la fórmula de control utilizada para el controlador de los tres convertidortes es la misma. Este control tiene dos variables que sonkpykilas cuales van a ser implementadas conRk pyRkipara permitir
modificar estas variables.
En ocaciones los convertidores trabajan con voltajes mayores de los que pueden soportar la mayoría de los amplificadores operacionales actuales. Por eso es necesario y también conveniente reducir estos valores a un rango menor. Como los amplificadores operacionales que se usan para la implementación (T L084) trabajan con una alimentación de±16V, y los convertidores implementados no trabajan a un voltaje mayor a 100V, es conveniente que se tome 1
10 de los voltajes presentes en los convertidores para ser procesado por el control. Igual de conveniente es queVre f también sea de101 del voltaje deseado a la salida del convertidor. De este modo
si se desean 50V a la salida del convertidor, solo es necesario una referencia de 5V.
Como se menciono con anterioridad, es necesario intercambiar las entradas de las variables, para que el controlador pueda funcionar cuando trabaja con el convertidor buck. Por este motivo se hacen los cálculos para los valores de los componentes cuando el controlador será utilizado para el convertidor buck y cuando es usado para el convertidor boost o el buck-boost.
A continuación se calculan los valores de resistencias y capacitores que son utilizados en el controlador. Los valores de estos elementos dan al circuito los valores de atenuación, variables de control, y demás valores necesarios para implementar la ley de control, ya con las constantes definidas para los convertidores utilizados. Los valores cálculados son para el controlador utilizado con los convertidores boost y buck-boost. Para el caso del buck, los valores son los mismos a excepción de que se detalle lo contrario, debido a que son pocos los cámbios necesarios.
La figura 5.23 muestra la forma de obtener el error; en este caso multiplicado por -1. Para cuando el con-trolador es utilizado para el convertidor boost y buck-boost elVout debe reducirse 10 veces su valor, que en la
entrada del operacional no se presenten voltajes mayores a 15V y queVre f sea de 101 del voltaje deseado a la salida. Utilizando valores comerciales de resistencias esto es posible con los siguientes valores.
Ra1 3.8kΩ Ra2 3.8kΩ Ra3 38kΩ Rsg 2kΩ
Al sustituir estos valores en (5.1), se tiene
−e=Vout
(3.8
k+3.8k)2k (38k+2k)3.8k
−Vre f
3.8k 3.8k
−e=Vout 10 −Vre f
Para el caso del convertidor buck se usan los siguientes valores de resistencias
Ra1 33kΩ Ra2 3.3kΩ
Ra3 3.3kΩ Rsg 33kΩ
quedando (5.1)
e=Vre f
(33
k+3.3k)33k (3.3k+33k)33k
−Vout
e=Vre f−
Vout
10
La figura 5.24 que se representa con la ecuación (5.2), contiene únicamente aRb3yRk p que sirven para
representar alkpdel control. Los valores que se les dá se escogen para mantener akp<3. Valores grandes de
kppueden llegar a inestabilizar el sistema. Los valores seleccionados se utilizan para que cuando el controlador
es usado con cualquiera de los tres convertidores. Estos valores son
Rb3 33kΩ Rk p [0,100]kΩ
quedando (5.2) como
kpe=−(−e)
[0,100k] 33k
kpe=e∗[0,3.3]
que quiere decir quekppuede tomar valores desde 0 hasta 3.3, dependiendo deRsg.
Con la figura 5.25 y la ecuación (5.3) se calcula el voltaje del inductor, el cual también es atenuado a 1 10de su valor real. Los valores deRa5,Ra6,Ra7yRa8son
Ra5 33kΩ Ra6 3.3kΩ Ra7 33kΩ Ra8 3.3kΩ quedando (5.3) como
VL=VL1
(33k+3.3k)3.3k 33k+3.3k)33k
−VL23.3k 33k
VL=
VL1 10 −
VL2 10
La figura 5.26 calcula la integral del error y la corriente en el inductor. Como para los tres convertidores se utiliza e mismo valor de inductor,Les igual para los tres casos. La constantekpen el control generalmente toma
valores desde 8 hasta 1000 (cálculo para los convertidores utilizados), dependiendo dekp. por lo que se busca
que en la implementación abarque este rango. Los valores de las resistencias y capacitores utilizados son
Rb1 6.9k kΩ Rb2 1.2MΩ
Rki [0,1]MΩ
C1 0.1µF 1
10
− 1
0.1µ∗6.9k Z
(VL1−VL2)dt+ 1 0.1µ∗[0,1M]
Z e dt 1 10 − 1 690µ Z
(VL1−VL2)dt+ [10,∞) Z
e dt
se puede ver que 690µcorresponde a la inductanciaLy[10,∞)esKi, que puede ser mayor a 10.
Por último la figura 5.27 solo necesita que las resistencias que contiene sean iguales, por lo que se les dan los valores
5.6. IMPLEMENTACIÓN DEL CONTROLADOR UNIVERSAL 43
La ecuación que se obtiene una vez que se le dan los valores de los elementos al control es
1 10
1
690µ
Z
VLdt−[0,3.3]e−[10,∞]
Z e dt
que es lo mismo que
1 10
1
L Z
VLdt−kpe−ki
Z e dt
o
σ= 1
10
z1−kpe−ki
Z e dt
dondekppuede tomar valores desde 0 hasta 3.3 ykivalores desde 10.
Para el convertidor buck el sistema esta representado por
−σ=−1 10
z1−kpe−ki
Z e dt
5.6.2. Ensamble
El material necesario para armar el circuito impreso del controlador para el buck es el siguiente:
CI T L084 Operacional cuatruple. CI T L082 Operacional doble. CI T L494 PWM.
Ra2,Ra3,Ra6,Ra8Resistencias de 3.3KΩ. Ra1,Ra5,Ra7Resistencias de 33KΩ. Rb1Resistencia de 6.9kΩ.
Rb3Resistencia de 33KΩ.
Rc1,Rc2,Rc3Resistencias de 1.5KΩ.
Rd1,Rd2,Rd3,Rd4Resistencias de 220kΩ. Rpr1,Rpr2Resistencias de 10kΩ.
Ro1,Ro2Resistencias de 1kΩ.
RsgTrimpot 100kΩ.
RkiTrimpot 1MΩ.
RprTrimpot 10kΩ.
Rs f Trimpot 20kΩ.
Cs f capacitor ceramico 0.01µF.
D1Diodo de 0.3V.
para el caso del controlador utilizado para el boost y buck-boost se puede usan
Ra1,Ra2,Ra6,Ra8Resistencias de 3.8KΩ. Ra3,Ra5,Ra7Resistencias de 38KΩ.
RsgTrimpot 5kΩ.
y los demás componentes son los mismos que en la tabla que le precede.
Figura 5.29: Circuito impreso del controlador general para convertidores de alta frecuencia de conmutación