INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCRICA
UNIDAD ZACATENCO
SIMULACIÓN DEL DESPLAZAMIENTO DE LA
CARGA PARA UNA GRÚA VIAJERA
TESIS
QUE PARA OBTENER EL TÍTULO DE
INGENIERO EN CONTROL Y AUTOMATIZACIÓN
EDUARDO GARCÍA CEDILLO
ASESORES:
M. EN C. IVONE CECILIA TORRES RODRÍGUEZ
ING. RICARDO HURTADO RANGEL
INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERiA MECANICA Y ELECTRICA
UNIDAD PROFESIONAL "ADOLFO LOPEZ MATEOS"
REPORTE TECNICO
QUE PARA OBTENER EL TITULO DE INGENIERO EN CONTROL Y AUTOMATlZACION
POR LA OPCION DE TIT ULACION PROYECTO DE INVES1'IGACION SIP20091276
DEBERA(N)DESARROLLAR
C.-EDUARDO GARCiA CEDILLO
"SIMUlACI6N DEL DESPLAZAMIENTO DE lA CARGA PARA UNA GRUA VIAJERA"
"
DESARROLLAR UNA INTERFAZ GRAFICA. QUE PERMITA SUMUlAR EL DESPLAZAMIENTO DE
LA CARGA , DE UNA GRUA VIAJERA, CON ' EL FIN DE MOSTRAR AL OPERADOR EL
COMPOR'1,'AMIENTO DE LA GiUJA Y SU DESPLAZAMIENTO CON RESPECfO A lA CARGA,
unuZANDO
VISUAL BASIC COMO LENGUAJE DE PROGRAMACION PARA LA SIMUlACION.セ INTRODUCCION
セ DESCRIPCI6N DE LA GRUA VIAJERA
セ MODELO MATEMATICO DE lA GRUA VIAJERA
セ DISENO DE lA INTERFAZ GRAFICA. DE LA GRUA VIAJERA
セ PROGRAMACION DE lA INTERFAZ GRAFICA.
セ COSTOS
»
CONCLUSIONESMExIco D.P., 28 DE MAYO 2010.
ING. JOSE meセLNアYNセ\_uez
INSTITUTO POLITÉCNICO NACIONAL ICA
2
ÍNDICE
Objetivo Objetivos Particulares Justificación INTRODUCCIÓN Antecedentes GrúasInterfaz Gráfica de Usuario
Definición etimológica y conceptual Definición de Interfaz Gráfica Problemática
Capítulo 1
DESCRIPCIÓN DE LA GRÚA VIAJERA
1.1 Características de las grúas tipo puente. 1.1.1 Velocidades de traslación.
1.1.2 Motores de accionamiento. 1.2 Manipulación de grúas tipo puente.
1.3 Especificaciones de los Elementos de la Grúa. 1.4 Especificaciones del Motor de Inducción. 1.5 Especificaciones de la Caja de Engranes.
Capítulo 2
MODELO MATÉMÁTICO DE LA GRÚA VIAJERA
2.1 Modelo de la Grúa Viajera
2.2 Descripción del Método de LaGrange 2.3 Modelo dinámico de la Grúa Viajera
2.4 Comportamiento típico de una Grúa Viajera
Capítulo 3
DISEÑO DE LA INTERFAZ GRÁFICA DE LA GRÚA VIAJERA
3.1 ¿Qué se entiende por ambiente Gráfico? 3.2 ¿Qué es Visual Basic?
3.2.1 Antecedentes Históricos
3.2.2 Características generales de Visual Basic
3.2.3 Programación secuencial frente a programación bajo Windows 3.3 Conceptos básicos de Visual Basic
3.3.1 Entorno de Trabajo 3.3.2 Proyecto en Visual Basic 3.3.3 Formularios
3.3.4 Controles 3.3.5 Algoritmo
3.3.6 Diagramas de flujo
3.4 Desarrollo de la Interfaz Gráfica de Usuario en Visual Basic 3.4.1 Ventana de Interfaz Gráfica
-Sección de parámetros de operación
- Sección de representación gráfica de la grúa - Representación del proceso
INSTITUTO POLITÉCNICO NACIONAL ICA
3
3.4.2 Diagrama de flujo de operación de la Grúa Viajera
3.4.3 Diagramas de flujo de programación de la Interfaz Gráfica - Cajas de texto
- Botones de comando - Imagen
- Cajas de selección - Controles de tiempo
Capítulo 4
PROGRAMACIÓN DE LA INTERFAZ GRÁFICA
Capítulo 5
COSTOS
5.1 Costos de Ingeniería y Material
CONCLUSIONES
GLOSARIO
BIBLIOGRAFÍA
ANEXO
63 64 64 65 68 69 71
77
90
91
92
93
95
INSTITUTO POLITÉCNICO NACIONAL ICA
4
Listado de Figuras
Figura 1.1 Estructura de una grúa tipo puente (grúa viajera).
Figura 1.2 Carro de la grúa sobre vigas transversales.
Figura 1.3 Componentes.
Figura 1.4 Grúa tipo puente al aire libre.
Figura 1.5 Grúa tipo puente en el interior de una nave.
Figura 2.1 Diagrama del Sistema Grúa Viajera.
Figura 2.2 Posición de referencia de la grúa viajera en m.
Figura 2.3 Aceleración de referencia de la grúa viajera en m/s.
Figura 2.4 Fuerza aplicada a la grúa viajera en N.
Figura 3.1 Ventana principal Visual Basic.
Figura 3.2 Ventana principal Interfaz.
Figura 3.3 Controles te Operación de la Interfaz.
Figura 3.4 Marco de Posición.
Figura 3.5 Marco de Operación.
Figura 3.6 Marco de Elevación.
Figura 3.7 Marco de Carga y Velocidad.
Figura 3.8 Marco de Tipo de Movimiento.
Figura 3.9 Marco de indicadores de inicio y fin de carrera.
Figura 3.10 Representación Gráfica de la vista superior de la Grúa.
INSTITUTO POLITÉCNICO NACIONAL ICA
5
Figura 3.12 Marco de Elevación del Malacate.
Figura 3.13 Controles tipo CWGraph.
Figura 3.14 Representación de la grúa en isométrico.
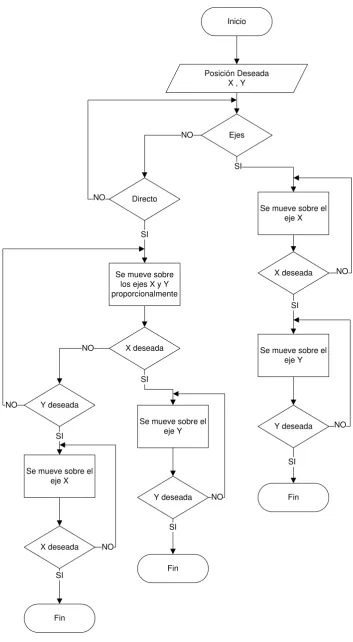
Figura 3.15 Diagrama de flujo de funcionamiento de la interfaz.
Figura 3.16 Diagrama de flujo de función que solo permite números.
Figura 3.17 Diagrama de flujo de algoritmo que no permite valores vacios.
Figura 3.18 Diagrama de flujo que indica advertencia de valores.
Figura 3.19 Diagrama de flujo de función de selección del contenido en caja de texto.
Figura 3.20 Diagrama de flujo del Botón de Comando Iniciar.
Figura 3.21 Diagrama de flujo del Botón de Comando Parar.
Figura 3.22 Diagrama de flujo del Botón de Comando Elevar.
Figura 3.23 Diagrama de flujo del Botón de Comando Descender.
Figura 3.24 Diagrama de flujo del botón de paro.
Figura 3.25 Diagrama de flujo de la caja de selección Colocar Carga.
Figura 3.25 Representación de la Carga.
Figura 3.27 Diagrama de flujo de la caja de selección Quitar Carga.
Figura 3.28 Diagrama de flujo de control de tiempo 1 (tmrDesp)
Figura 3.29 Diagrama de flujo de control de tiempo 2 (tmrDescenso)
INSTITUTO POLITÉCNICO NACIONAL ICA
6
Listado de Tablas
Tabla 3.1 Controles estándar
Tabla 3.2 Símbolos utilizados en Diagramas de Flujo.
Tabla 3.3 Combinación de Condiciones programadas en tmrDesp
Tabla 4.1 Declaración de variables
Tabla 4.2 Declaración de Funciones más utilizadas
Tabla 4.3 Evento KeyPress llamando a la función numeros
Tabla 4.4 Sentencias If condicionando valores en evento Change
Tabla 4.5 Código para seleccionar texto
Tabla 4.6 Programación evento Load de Form
Tabla 4.7 Código de programación para control de tiempo 2 (tmrDescenso)
Tabla 4.8 Código de programación para control de tiempo 3 (tmrElevar)
Tabla 4.9 Código de programación para control de tiempo 1 (fragmento)
Tabla 4.10 Código de programación para el botón de comando Iniciar
Tabla 4.11 Código de programación para el botón de comando Parar
Tabla 4.12 Código de programación para el botón de comando Elevar
Tabla 4.13 Código de programación para el botón de comando Descender
Tabla 4.14 Código de programación para el botón de paro
INSTITUTO POLITÉCNICO NACIONAL ICA
7
Listado de Simbología
Símbolo
Descripción
r1 Resistencia del rotor
r´1 Resistencia del rotor
Xm Resistencia mutua
Xls Reactancia de enlace del motor
J Inercia del rotor
Tem Par electromagnético
Tcaja Par torsional máximo de la caja de engranes
it Relación de transmisión
Ta Par torsional debido a la aceleración
Tc Par debido a las fuerzas de oposición constantes
ωmr Velocidad mecánica del rotor
ωcaja Velocidad angular de la caja de engranes
ẋ Velocidad máxima de la carga
r Radio del elemento de transmisión
L Lagrangiano
Ec Energía cinética
Ep Energía potencial
INSTITUTO POLITÉCNICO NACIONAL ICA
8
,
i i
q q
Coordenadas generalizadasT Tensión del cable
x Posición del carro (grúa)
l Longitud del cable
θ Ángulo del cable con respecto al eje vertical
Velocidad angular1
u
Fuerza aplicada al carro2
u
Par aplicado al malacateg
M Masa del carro
m Masa de la carga
r Radio de la rueda
v1 Velocidad del carro
px Posición en el eje X
py Posición en el eje Y
vx Velocidad en eje X
vy Velocidad en eje Y
vxtotal Velocidad total en eje X
vp Velocidad del péndulo
Ecp Energía cinética del péndulo
Epg Energía potencial de la grúa
INSTITUTO POLITÉCNICO NACIONAL ICA
9
Epp Energía potencial del péndulo
g Gravedad
ẍ Aceleración del carro
INSTITUTO POLITÉCNICO NACIONAL ICA
10
OBJETIVO
Desarrollar una interfaz gráfica que permita simular el desplazamiento de la carga de una grúa viajera, con el fin de mostrar al operador el comportamiento de la grúa y su desplazamiento con respecto a la carga, utilizando Visual Basic como lenguaje de programación para la simulación.
OBJETIVOS PARTICULARES
Desarrollar una plataforma de simulación para la operación de una grúa viajera.
INSTITUTO POLITÉCNICO NACIONAL ICA
11
JUSTIFICACIÓN
Actualmente en la mayoría de los sistemas electrónicos y mecánicos es común el uso de una computadora dentro del proceso de control. Esto es así, porque el software, más que el hardware, permite hacer cualquier ajuste a los parámetros del sistema con el fin de obtener una respuesta deseada. Además, las computadoras también pueden efectuar funciones de supervisión, como la programación de numerosas aplicaciones requeridas, también el uso de estas computadoras nos permiten analizar las acciones o tareas que se pretenden realizar por medio de una simulación y así analizar el comportamiento del sistema o proceso.
Los procesos tecnológicos avanzados proporcionan nuevas oportunidades en la industria. Cada día se pueden encontrar procesos de producción más rápidos y eficaces. En particular, para permanecer competitivo en el mercado actual son requeridos procesos de flujo en línea eficientes.
Tradicionalmente, las grúas viajeras han sido usadas por personal capacitado para mover manualmente materiales desde una locación a otra. El movimiento realizado manualmente de cargas pesadas por largas distancias consume mucho tiempo y es muy ineficiente. Por lo tanto, las tasas de producción pueden ser afectadas por este desplazamiento lento e inexacto de las materias primas o los artículos fabricados, por estas razones la creación de una interfaz gráfica de usuario nos permite una mejora en la manipulación de la grúa viajera.
Por otra parte, existe una gran variedad de aplicaciones industriales donde es necesario trasladar cargas en áreas en las cuales se dispone espacios muy pequeños. En estas, un control de posición preciso de la carga llega a ser crucial. En algunas otras aplicaciones el inicio o paro repentino de una grúa viajera causa que la carga se balancee de una manera descontrolada, y como consecuencia de estas oscilaciones se puede dañar la carga transportada, los objetos que estén cerca del área de trabajo e incluso elementos de la propia grúa.
INSTITUTO POLITÉCNICO NACIONAL ICA
12
INTRODUCCIÓN
En el presente trabajo se desarrolla y diseña una interfaz gráfica que nos permita la simulación del desplazamiento de una grúa para poder comprender mejor el comportamiento de ésta.
Éste trabajo se deriva de el proyecto de investigación con título “Monitoreo y Control de la posición de una grúa viajera”, en el cual se identificaron las condiciones necesarias para el desplazamiento de una grúa viajera para realizar una interfaz gráfica.
En éste trabajo se describen los componentes principales que dan forma a la interfaz diseñada, así como el código fuente de algunos de estos componentes, con el fin de introducir al lector en el funcionamiento de dicha interfaz.
INSTITUTO POLITÉCNICO NACIONAL ICA
13
ANTECEDENTES
Grúas
Las primeras grúas fueron inventadas por los antiguos Griegos, accionadas por hombres o animales de carga, como burros. Estas grúas eran utilizadas para la construcción de edificios altos.
Grúas más grandes fueron desarrolladas más adelante, empleando el uso de poleas, permitiendo la elevación de pesos más pesados. En la alta edad media, las grúas en los puertos, fueron introducidas para cargar y para descargar la mercancía los barcos y sirvieron como ayuda en su construcción algunas fueron construidas en torres de piedra para dar fuerza y la estabilidad adicional. Las primeras grúas se construyeron de madera, pero con la llegada de la revolución industrial, el hierro fundido y el acero asumieron el control.
Por muchos siglos la energía fue suministrada por el esfuerzo físico de hombres y animales, aunque en molinos de agua y de viento se manejaba por energía natural concentrada. La primera energía mecánica fue proporcionada por motores de vapor, la primera grúa de vapor fue introducida en el siglo XVIII, al XIX. Las grúas modernas utilizan generalmente, los motores de combustión interna o los sistemas de motor eléctrico e hidráulicos para proporcionar una capacidad de elevación mucho mayor que previamente era imposible, aunque las grúas manuales todavía se utilizan donde es poco rentable disponer de energía.
INSTITUTO POLITÉCNICO NACIONAL ICA
14
Interfaz gráfica de usuario
El origen de su nacimiento está en la búsqueda de un método de interacción amigable con los ordenadores que dejaron atrás la interfaz de línea de comandos (Marrero Expósito, C. 2006). La repercusión que ha tenido su descubrimiento sobre la computación informática se ha traducido en muchos beneficios para aquellos individuos y empresas que han actuado con astucia aprovechando y explotando los hallazgos propios y ajenos.
Poseer la interfaz, es de algún modo, tener una herramienta poderosa de control sobre las personas que la utilizan. Es poder para definir los modelos de interacción, definir los signos que intervendrán y por lo tanto tendrán que ser aprendidos por el “usuario”. Es al fin y al cabo, una herramienta política con la que se puede limitar o dirigir las posibilidades de acción del usuario sobre el sistema informático.
La interfaz gráfica como artefacto tecnológico, tiene una historia que contar: nace en el año 1973 en el centro de investigación Xerox Alto, donde se partió con el objetivo básico de encontrar un modelo óptimo de interacción persona-ordenador, pasa por un proceso de eclosión y de madurez donde se definen sus elementos básicos, para acabar convirtiéndose en un producto de consumo estético dentro de los sistemas interactivos, donde la interfaz más allá de un medio de interacción óptimo, se transforma en un objeto inteligente abierto a los procesos de personalización por parte del usuario.
El primer periodo está marcado por la investigación y la búsqueda de un paradigma de interacción definitivo y óptimo, que sustituye la práctica, pero compleja, interfaz de línea de comandos.
Ya desde los años cuarenta, se había trazado de forma teórica, modelos de ordenadores personales que debían servir para almacenar, editar y compartir información de forma sencilla. Estos primeros años están marcados por los pioneros en la investigación, los cuales trataron de dar forma a la interfaz gráfica, y por extensión a un sistema operativo óptimo que permitiese una interacción amigable entre las personas y los ordenadores.
INSTITUTO POLITÉCNICO NACIONAL ICA
15
forma sencilla. Poseía una interfaz gráfica rudimentaria en blanco y negro, con la que se podía interaccionar mediante un ratón. Los botones serían representados a través de formas textuales, de un modo muy simple. La interfaz gráfica no presentaba elementos icónicos, ni pestañas, ni barras de desplazamiento en la navegación de la información.
En el año 1981, el ordenador Xerox Star 8010 se podría considerar como el primer ordenador que introduce una interfaz gráfica de usuario incluyendo y aplicando la metáfora del escritorio. De aquí partiría la idea de convertir al ordenador en una máquina apta para ser usada como medio de edición y publicación de contenidos, interés primordial de la empresa Xerox, especializada en sistemas de impresión. Fue el primero en incluir un sistema de ventanas totalmente contemporáneo como vienen incorporadas en las interfaces actuales, siendo posible sobreponer unas ventanas a otras y manejar múltiples elementos en el escritorio de trabajo.
El segundo periodo de la evolución histórica de las interfaces gráficas está unida a la revolución de los ordenadores personales surgida en el año 1981. Para la interfaz gráfica, este período significa su implementación definitiva en los hogares y oficinas de trabajo.
Por un lado Apple acabaría definiendo el modelo incluido en su MAC OS, y por otro lado, el modelo de Windows quedaría definitivamente desarrollado al final de este periodo por la empresa Microsoft, ambos inspirados y herederos del modelo de interacción WIMP desarrollado en el Xerox Parc.
Los principales protagonistas de este periodo serán IBM, Microsoft, Apple y el proyecto de software libre GNU/LINUX. Cada una de estas empresas tuvo un papel en la evolución de la interfaz y cada una hizo sus aportaciones personales definiendo los paradigmas de interacción actuales disponibles en cualquier dispositivo interactivo.
La ampliación de cuotas de mercado de mano de IBM, hizo posible la necesaria colaboración entre ésta, y la empresa Microsoft, la cual adaptaría su sistema operativo MS-DOS a una interfaz gráfica de usuario para operar sobre ordenadores IBM en el año 1985. Este sistema operativo era Windows 1.0. Su interfaz gráfica trae incluida un administrador de archivos, una calculadora, un calendario, un reloj, un block de notas, y un emulador de terminal (antiguo Interfaz de línea de comandos).
INSTITUTO POLITÉCNICO NACIONAL ICA
16
iconografía, estando caracterizada por la ausencia de representación de iconos en los archivos, haciendo imposible asociar archivos y aplicaciones.
El sistema operativo windows 95 fue lanzado por Microsoft en octubre del año 1995. Este sistema operativo significo el inicio del imperio Microsoft en el mercado del software informático. Microsoft consiguió integrar en Windows 95, el sistema operativo MS-DOS con una interfaz gráfica de forma coherente. Windows 95 tiene una clara orientación a redes, por lo que vendrá integrado con el software Internet Explorer, que sustituirá al gestor de archivos dispuesto anteriormente. Un cambio importante que introdujo este sistema operativo fue convertir la interfaz inicial orientada a aplicaciones,
en una interfaz orientada a objetos.
Otra novedad que introdujo la interfaz gráfica de Windows 95 es el menú de inicio, al que han sido asociados, en forma de árbol, el grueso de las aplicaciones, archivos y funciones del sistema. El botón de inicio será uno de los grandes hallazgos de
Microsoft que mantiene actualmente en todas las interfaces introducidas con sus sistemas operativos.
Seguido de La interfaz gráfica del sistema operativo BeOS tiene un aspecto gráfico acabado y bien desarrollado. BeOS introduce de forma elegante todos aquellos hallazgos realizados hasta el momento.
GNOME es el nombre de la interfaz gráfica desarrollado originalmente por Javier de Icazas y Federico Mena, ambos mexicanos, y fundadores de la fundación Genome, la
cual se creó al igual que el proyecto KDE, con el objetivo de dotar de un entorno gráfico de escritorio y una plataforma de desarrollo de aplicaciones totalmente libres en sistemas
operativos GNU/LINUX.
El sistema operativo MAC OS X fue lanzado con los ordenadores Apple Macintosh en el año 2001, y su arquitectura está basada en tecnología Unix al contrario de sus versiones anteriores. El primer elemento diferenciador que introduce la interfaz de Macintosh es una barra de tareas especial, también llamada Dock, ya introducido por la
interfaz de NEXTSTEP. Este elemento aparece posicionado en la parte inferior central del escritorio, y mantiene accesos directo a las aplicaciones más usadas en el sistema a través de iconos.
INSTITUTO POLITÉCNICO NACIONAL ICA
17
disponer de una alternativa de sistema operativo capaz de competir en calidad con los sistemas Unix, muy superiores a los primeros Windows en su arquitectura.
Windows Xp se preocupó por adaptar la interfaz al perfil del usuario. Ahora incluye además procesos automatizados, para actuar con “inteligencia” en algunas áreas de la interfaz gráfica como ocurre en la barra de tareas, aglutinando bajo un mismo icono varias ventanas abiertas de la misma aplicación, ahorrando espacio, pero volviendo del mismo modo más complejo la interacción con la información.
Definición etimológica y conceptual.
El concepto de interfaz es un concepto amplio que ha sido definido, según el ámbito de conocimientos, desde varios puntos de vista: desde la biología (interfase), ha sido definida como la “capa” de un organismo que separa su interior del exterior, desde la electrónica y las telecomunicaciones, se ha definido como “puerto a través del que se envían o reciben señales desde un sistema o subsistemas hacia otros”. En química interfaz es la superficie entre dos fases distintas en una mezcla heterogénea”.
Si se verifica la etimología de la palabra interfaz encontramos una palabra compuesta, por dos vocablos:
Inter proviene del latín inter, y significa, “entre” o “en medio”, y Faz proviene del
latín facĭes, y significa “superficie, vista o lado de una cosa”. Por lo tanto una traducción literal del concepto de interfaz atendiendo a su etimología, podría ser “superficie, vista, o lado mediador”.
En el contexto de la interacción persona-ordenador, hablamos de interfaz de usuario, para referirnos de forma genérica al espacio que media la relación de un sujeto y un ordenador o sistema interactivo. La interfaz de usuario, es esa “ventana” de un sistema informático, que posibilita a una persona interactuar con él.
INSTITUTO POLITÉCNICO NACIONAL ICA
18
El concepto de interfaz gráfico, nos da pistas sobre el modelo de interacción y la tipología de signos que contiene esta superficie mediadora.
Definición de interfaz gráfica.
Una interfaz gráfica es cualquier medio por el cual uno puede interactuar con una computadora a través de algún tipo de software gráfico. Comúnmente, esto se consigue a
través del control mediante el teclado y el mouse de cursores, menús, ventanas, íconos y
cajas de diálogo, pero puede tomar cualquier forma imaginable. Gran parte del trabajo que se realiza en relación con el procesamiento digital de señales (DSP), el diseño de instrumentos interactivos, los sistemas para la interpretación en tiempo real y la síntesis gráfica (graphic synthesis) se ocupa del diseño de interfaces gráficas innovadoras.
Problemática.
Nielsen (1997) expone que lo habitual es que un usuario no lea con detalle ni siquiera una mínima parte de los textos de una página web. En su lugar, y por economía de tiempo, el usuario se limita a ojear la página. Es decir, el usuario realiza un rápido barrido visual de cada página buscando elementos que llamen su atención, lo mismo pasa con una interfaz gráfica si ésta no es diseñada con los elementos necesarios que llamen la atención del usuario
Si nos acercamos al problema desde el lado del sujeto, entonces sí podríamos entender de alguna manera la afirmación de que una interfaz gráfica pueda ser un método de interacción con un sistema.
Cuando hablamos de la interfaz, hablamos del proceso mediante el cual, un sujeto, se acerca a un sistema tecnológico con el que interacciona a través de los signos inscritos en dicha superficie. El proceso interactivo, requiere de una serie de “requisitos” cognitivos básicos por parte del sujeto, como percibir, decodificar, memorizar, decidir y navegar a través de la interfaz gráfica. Desde esta perspectiva, la interfaz sólo cobraría sentido, en cuanto el sujeto es capaz de “comprender” el significado y el proceso de interacción, y sus facultades cognitivas son capaces de interpretar adecuadamente los signos que se producen sobre la interfaz y usarlas adecuadamente.
INSTITUTO POLITÉCNICO NACIONAL ICA
19
CAPÍTULO 1
DESCRIPCIÓN DE LA GRÚA VIAJERA
INSTITUTO POLITÉCNICO NACIONAL ICA
20
1. DESCRIPCIÓN DE LA GRÚA
Las grúas viajeras son máquinas empleadas para la elevación y el transporte, aunque no es común su uso en todos los ámbitos. Por lo general, son aparatos destinados al transporte de materiales y cargas en desplazamientos verticales y horizontales en el interior y exterior. Se les utiliza en procesos que implican almacenamiento o bien en todo lo relativo a la fabricación.
En lo que respecta a la constitución de estas máquinas, están compuestas de dos vigas transversales a las vigas principales y de uno o dos pares de vigas laterales (testeros), longitudinales en dirección a la nave y que sirven de sujeción a las que se encuentran transversales y en donde van las ruedas como se puede ver en la siguiente figura.
Figura 1.1 Estructura de una grúa tipo puente (grúa viajera).
También forma parte de la estructura general de la grúa viajera un carro automotor, que está lo suficientemente capacitado como para transitar encarrilado a lo largo de las vigas transversales de la estructura de la grúa.
INSTITUTO POLITÉCNICO NACIONAL ICA
21
Figura 1.2 Carro de la grúa sobre vigas transversales.El cableado de izamiento del polipasto se descuelga entre las dos partes de la estructura. Por esta razón, al combinarse el movimiento de la estructura con los movimientos del carro lo que se origina es la posibilidad de proceder sobre cualquier punto de una superficie que haya sido delimitada por la extensión de los rieles.
Estos rieles de desplazamiento (vigas transversales) se encuentran casi en el mismo plano horizontal en el que está el carro de la grúa viajera y, además, tienen un rol más que vital porque es su propia altura la que va a determinar la altura máxima con la que se podrá operar.
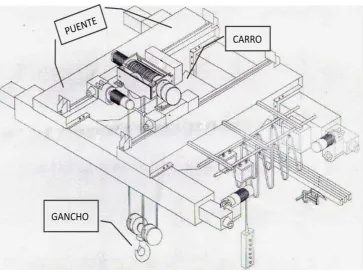
Los componentes de una grúa tipo puente (Figura 1.3), desde el punto de vista de seguridad se consideran tres partes diferenciadas:
El puente: se desplaza sobre las vigas principales a lo largo de la nave, y este tiene sobre si el carro con el polipasto.
El carro:se desplaza sobre las vigas transversales o puente, y recorre el ancho de la nave.
INSTITUTO POLITÉCNICO NACIONAL ICA
[image:23.595.117.481.83.355.2]22
Figura 1.3 ComponentesLa grúa tipo puente realiza tres movimientos y estos son:
Traslación del puente: este se realiza a lo largo de las vigas principales, es decir a lo largo de la nave.
Traslación del carro: este se realiza desplazando el carro a lo ancho de la nave sobre las vigas transversales, es decir a lo largo del puente.
Elevación y Descenso: este movimiento se realiza por efecto del motor que sujeta el gancho con la ayuda de un cable principal y tiene como efecto subir o bajar la carga a trasladar.
1.1 Características de las grúas tipo puente.
En la clasificación de las grúas tipo puente existen una serie de datos básicos dependiendo del tipo de grúa.
1.1.1 Velocidades de traslación.
INSTITUTO POLITÉCNICO NACIONAL ICA
23
1.1.2 Motores de accionamiento.
El tipo de motor a utilizar en el transporte, será según el tipo de empleo para el que se vaya a utilizar la grúa tipo puente, estos motores básicamente son:
Motores de corriente continua. Con su correspondiente equipo de regulación de velocidad. Por lo general este tipo de motores son caros, muy delicados y necesitan mucho mantenimiento, por estas razones su existencia en ésta aplicación está muy limitada.
Motores de corriente alterna. El motor asíncrono de rotor bobinado, es el más utilizado en la aplicación de las grúas tipo puente, ya que la regulación de la velocidad se da por resistencias, que de manera en que estas se van eliminado o desconectando, la velocidad del motor aumenta.
[image:24.595.108.467.428.687.2]Sin embargo, hay dos tipos de estructuras según la grúa viajera a la que se hace referencia. Por ejemplo, aquellas que se encuentran al aire libre tienen una estructura que está fundamentalmente destinada para dicha sustentación como se muestra en la siguiente figura.
Figura 1.4 Grúa tipo puente al aire libre.
INSTITUTO POLITÉCNICO NACIONAL ICA
[image:25.595.103.499.113.329.2]24
Figura 1.5 Grúa tipo puente en el interior de una nave.La operación de la grúa viajera se puede hacer de distintas maneras.
Desplazable a lo largo del puente.
Permite guiar la carga manualmente y permite mantener una distancia de seguridad entre el conductor y la carga.
Mando suspendido del carro.
El conductor está próximo a la carga y puede guiarla manualmente, por lo general este tipo de operación se utiliza en trabajos de mantenimiento y montaje.
Mando suspendido de un punto fijo del puente. El mando se encuentra en un extremo del puente.
Mando por radio.
Se utiliza cuando el conductor no puede acompañar a la grúa, por ejemplo centrales de energía nuclear.
1.2 Manipulación de grúas tipo puente.
INSTITUTO POLITÉCNICO NACIONAL ICA
25
Antes de elevar la carga, realizar una pequeña elevación para comprobar su estabilidad y en caso de carga inclinada descender y realizar un eslingado que asegure una carga estable.
Elevar la carga siempre con el carro y el puente alineados con la misma, tanto horizontal como verticalmente para evitar balanceos. La carga se debe encontrar suspendida horizontalmente para un desplazamiento seguro.
El operario debe acompañar siempre a la carga para mayor control de las distancias y observar en todo momento la trayectoria de la misma, para evitar golpes contra obstáculos fijos.
No colocarse nunca debajo de la carga suspendida, ni transportarla por encima de trabajadores; la carga siempre debe llevarse por delante.
La colocación de los elementos de elevación como cadenas y eslingas se deben colocar asegurando un perfecto amarre de la carga, tarea que lleva a cabo el operario.
1.3 Especificaciones de los Elementos de la Grúa.
Las especificaciones de la grúa que se propone para el desarrollo de este trabajo tomadas del proyecto de investigación Monitoreo y control de posición de una grúa viajera (Torres Rodríguez, I.C. 2006, pp. 10-15) son:
Masa máxima de la carga: 1500 Kg.
Desplazamiento máximo: 200 m.
Masa de la grúa: 500 Kg.
Longitud máximo del cable (malacate): 3 m.
Radio de las ruedas: 10 cm.
1.4 Especificaciones del Motor de Inducción.
Con base a las especificaciones de la grúa viajera, se utilizó como elemento motriz un motor de inducción tipo jaula de ardilla de 5 HP, trifásico, 60 Hz, 4 polos, 220 V, cuyos parámetros son:
INSTITUTO POLITÉCNICO NACIONAL ICA
26
rr´ 0.0764
X
m
5.834
X
ls
0.2145
X
lr´
0.2145
J
2.8
kgm
2La velocidad nominal de la máquina es de 188 RPM a un deslizamiento de 0.0248
y la corriente nominal es de 11 A.
1.5 Especificaciones de la Caja de Engranes.
Generalmente, en las aplicaciones de motores eléctricos se usan cajas de engranes. Estas, son comúnmente usadas para aumentar el par de torsión del motor y disminuir su velocidad. En las cajas reductoras la potencia del motor se ve reducida al ser multiplicada por un cierto factor de eficiencia.
Cuando se utilizan las cajas reductoras la relación del par torsional es
caja em
t
T
T
i
,
(1.1)
es decir
caja em t
T
T i
(1.2)donde
i
t es la relación de transmisión yT
caja el par torsional máximo proporcionado porla caja de engranes
El par torsional máximo se obtiene de
caja a c
T
T
T
INSTITUTO POLITÉCNICO NACIONAL ICA
27
siendo
T
a el par torsional debido a la aceleración yT
c el par debido a las fuerzas deoposición constantes como la fricción.
Por otra parte, la velocidad mecánica del rotor se obtiene mediante
mr
i
t caja
(1.4)O bien
mr caja
t
i
(1.5)
donde
caja es la velocidad angular máxima determinada porcaja
x r
(1.6)siendo x la velocidad máxima de la carga y r el radio del elemento de transmisión.
En este trabajo se utiliza un motor de inducción cuyo par es de 20.373Nm y su
velocidad de 188.495rad s/ . Se seleccionó una caja de engranes de 3:1, obteniéndose de ella un par de 407.46Nm y una velocidad de 62.83rad s/ , cuyos valores se ajustan
INSTITUTO POLITÉCNICO NACIONAL ICA
28
CAPÍTULO 2
MODELO MATEMÁTICO DE LA GRÚA
VIAJERA
INSTITUTO POLITÉCNICO NACIONAL ICA
29
2. MODELO MATEMÁTICO DE LA GRÚA VIAJERA
En este capítulo se presenta el modelo matemático del sistema de la grúa viajera de dos grados de libertad y se propone una trayectoria que permita el movimiento de la grúa viajera con una oscilación limitada en la carga, los cuales son necesarios para simular el esquemas de control propuesto tomados del proyecto de investigación
“Monitoreo y control de posición de una grúa viajera” con no. de registro SIP 20091276 (Torres Rodríguez, I.C. 2006, pp. 10-15).
El control de la grúa viajera se divide en dos áreas principales, la planeación del movimiento (o trayectoria) y el control del movimiento, las cuales conjuntas logran que la grúa viajera siga un camino predeterminado.
2.1 Modelo de la Grúa Viajera.
Una grúa viajera de dos grados de libertad es un equipo industrial cuyo fin es manipular una carga desde y hacia cualquier punto en un plano formado por los ejes vertical y horizontal. En otras palabras, una grúa viajera tiene las capacidades de levantar y desplazar transversalmente una carga.
En esta al igual que sucede con los seres humanos, para ejecutar cualquier tarea se debe analizar cuáles serán los movimientos necesarios y cuál será la fuerza que se le aplicará. El modelo dinámico precisamente analiza esta situación y expresa las fuerzas o pares requeridos por los actuadores para lograr el movimiento deseado en términos de posición, velocidad y aceleración a lo largo de la trayectoria. Esto permite evaluar vibraciones, sobre voltajes, etc. que llevan a movimientos erráticos o descontrolados.
El modelo plantea una serie de ecuaciones, cuya resolución nos permite obtener la información necesaria que será enviada hasta la etapa de control de la grúa viajera. Este control envía la señal de voltaje o corriente a la fuente de potencia de la grúa, encargada de convertirla en la potencia adecuada que necesita el motor para realizar la función asignada. Conocer esta información permite que las etapas de control, de potencia, y el motor de inducción tengan un mejor funcionamiento y se desgasten menos.
2.2 Descripción del Método de LaGrange.
INSTITUTO POLITÉCNICO NACIONAL ICA
30
Las coordenadas generalizadas de un sistema, son un conjunto de coordenadas independientes que se necesita para describir completamente el movimiento del sistema. El número de coordenadas generalizadas necesario para describir el sistema es igual al número de grados de libertad.
A su vez, el lagrangiano L es la diferencia entre la energía cinética
E
c y la energía potencial Ep de un cuerpo en movimiento en un punto dado de su trayectoriaL
Ec
Ep
. La acción o principio de Hamilton es la integral temporal dellagrangiano sobre una trayectoria. A cada trayectoria imaginable corresponde un valor numérico de acción.
2 1,
t i i tI
L q q dt
(2.1)donde:
I Acción o principio de Hamilton
,
i iq q
Coordenadas generalizadasL Lagrangiano
Las ecuaciones diferenciales que describen las posibles trayectorias de un sistema requieren que la acción esté en un valor mínimo o máximo, con el objeto que la diferencial funcional de la acción se anule (Katsuhiko Ogata, 1992):
0
S
(2.2)Esta condición da lugar a las ecuaciones de Euler-Lagrange, la cual
aplicada al método lagrangiano proporciona las ecuaciones de movimiento para el
sistema:
0 1, 2,....,
i i
d L L
i n
dt q q
INSTITUTO POLITÉCNICO NACIONAL ICA
31
La ecuación de Euler-Lagrange minimiza la acción reproduciendo justamente la ecuación de movimiento de Newton (Cardona, Clos, 2000).
2.3 Modelo Dinámico de la Grúa Viajera.
Para realizar el estudio presentado en este trabajo se muestra el modelo de dinámica de la grúa considerando las siguientes premisas, con la cuales se reduce la complejidad del modelo:
1. El momento de inercia de la carga es ignorado.
2. La carga puede ser considerada como una masa puntual. 3. El cable es considerado rígido y con masa despreciable.
4. El movimiento de la carga se supone restringido al plano vertical.
Estas premisas, determinan el tipo de comportamiento dinámico que se utilizan en este trabajo, aún para el caso en que el momento de inercia de la carga no puede ser ignorado porque su magnitud es tal que las fuerzas debidas a la aceleración angular de la carga son muy grandes. Sin embargo, el modelo sigue siendo válido si se proponen trayectorias de seguimiento suficientemente suaves (R.L. Norton, 1990).
Por otra parte, la carga se puede considerar como de masa puntual siempre y cuando la carga tenga una distribución homogénea y simétrica de la masa y que el punto de levante sea el adecuado, es decir que este alineado con el eje vertical del centro de gravedad de la carga y ligeramente por encima de éste.
Asimismo, el considerar al cable como de masa despreciable es válido ya que generalmente la masa del cable es muy pequeña con relación a la masa de la carga y la masa del carro de la grúa. La consideración de que el cable es rígido es realista para algunos materiales (muchos de ellos de uso actual en las grúas) cuya deformación elástica es pequeña. Por último, el movimiento se encuentra restringido al plano vertical ya que ese es el propósito de análisis de este trabajo.
El movimiento en una tercera dimensión se considera como parte de otro análisis. Perturbaciones externas (viento, etc.) que puedan provocar un movimiento fuera del plano vertical, no son consideradas. Dadas las razones anteriores podemos concluir que es factible analizar la dinámica de una grúa real bajo las suposiciones anteriores.
INSTITUTO POLITÉCNICO NACIONAL ICA
32
desplazamiento del cable (desplazamiento vertical de la carga). Los dos grados de libertad anteriores, (la posición del carro y la longitud del cable) son totalmente actuados. Sin embargo, la grúa tiene un tercer grado de libertad no actuado, el cual es el ángulo formado por el cable con respecto al eje vertical. Este último tiene que ser considerado con el propósito de determinar la posición de la carga y de lograr un control exacto de la posición de la misma, evitando la aparición de balanceos indeseables. Por esta razón, el sistema puede ser considerado como subactuado, es decir, cuenta con un actuador menos que los grados de libertad.
Un diagrama esquemático de una grúa viajera de dos grados de libertad se muestra en la Figura 2.1
Figura 2.1 Diagrama del Sistema Grúa Viajera
Las variables que se utilizan durante el desarrollo del modelo de la grúa viajera son:
T : Tensión del cable.
x : Posición del carro (grúa). x : Velocidad del carro.
l : Longitud del cable (malacate).
: Ángulo del cable con respecto al eje vertical.
: Velocidad angular.Carro
Malacate
m mg
Z X
U1
U2 x
M
INSTITUTO POLITÉCNICO NACIONAL ICA
33
1u
: Fuerza aplicada al carro.2
u
: Par aplicado al malacate.Por otra parte los parámetros del sistema son:
g
M : Masa de la plataforma (del carro).
m : Masa de la carga.
r : Radio de la rueda.
Como el sistema tiene dos grados de libertad. Las coordenadas generalizadas son
y
x
.La energía cinética de la plataforma (carro) es
2 1
1 2
g g
Ec M v (2.4)
donde
v
1
x
, obteniéndose como2
1 2
g g
Ec M x
. (2.5)
A su vez, para encontrar la energía cinética del péndulo, se hace uso de la longitud del cable l y el ángulo del cable
para encontrar la posición del péndulo, estoes
cos
x y
p l sen
p l
(2.6)
INSTITUTO POLITÉCNICO NACIONAL ICA
34
cos cos x y dv lsen l
dt d
v l l sen
dt
. (2.7)La velocidad total en el eje x, es
cos
xtotal
v x l
, (2.8)Por lo tanto, el vector de velocidad del péndulo es
cos p x l v l sen
, (2.9)Desarrollando la ecuación (2.9) se tiene
2 2
2 cos
2 2p
v
x
l x
l
. (2.10)
La energía cinética del péndulo es
2 2 2
1
2 cos 2
p
Ec m x l x
l
. (2.11) Y la energía cinética del sistema está dada por:
2 2 2 2
1 1
2 cos
2 2
g p g
EcEc Ec M x m x l x
l
(2.12)La energía potencial del sistema es EpEpg Epp, la energía potencial de la
grúa es cero y la energía potencial del péndulo es
INSTITUTO POLITÉCNICO NACIONAL ICA
35
cos
p
Ep
m g l l
(2.13)donde g es la gravedad.
Por lo tanto, considerando a
E
c y a la Ep, encontramos el lagrangiano (2.14)para determinar las ecuaciones de movimiento de la grúa viajera.
2 2 2 2
1 1 2 cos cos
2 g 2
L Ec Ep M x m x l x
l
m g l l
(2.14)
Aplicando las ecuaciones de LaGrange a la ecuación, obtenemos:
0
0
d
L
L
dt
x
x
d
L
L
dt
(2.15)De esta manera tenemos que la
L
x
de la ecuación (3.15) es:2 2
1
1
cos
2
2
cos
g gL
dx
dx
dx
M
m
ml
x
dx
dx
dx
M x mx ml
(2.16)Ahora se obtiene la derivada de la ecuación anterior
2
cos cos
g
g
d
d L dx
M m ml
dt x dt dt
M m x ml sen
INSTITUTO POLITÉCNICO NACIONAL ICA
36
Aplicando nuevamente las ecuaciones de lagrange a la ecuación (2.14), obtenemos 2 2 2
1
2
cos
2
cos
L
d
d
m
l x
l
d
d
m l x
m l
(2.18)Obteniendo la derivada de la ecuación anterior
2 2cos
cos
d x
d
L
d
ml
ml
dt
dt
dt
ml x
x sen
ml
(2.19)Asimismo, se obtiene la L
de la ecuación (3.15):
cos
cos
d d
L
mlx mgl
d d
mlx sen mglsen
(2.20)Por lo tanto, las ecuaciones de movimiento de la grúa viajera son:
2 1 2cos
0
cos
gu
M
m x ml
sen
ml x
x sen
ml
ml x sen
m g l sen
(2.21)Despejando a x y a
de la ecuación (2.21), que corresponde a la aceleración deINSTITUTO POLITÉCNICO NACIONAL ICA
37
2
1 cos
cos
g
u m l sen
x
M m
x x sen x sen gsen
l
(2.22)
Asimismo, considerando a la aceleración de la grúa y la masa total de la grúa, se
obtiene la fuerza total (
u
L) total de la grúa, por lo tanto se tiene que:
L g
u
x M
m
(2.23)Las ecuaciones (2.22) y (2.23) se utilizan para realizar la simulación de la grúa junto con el control vectorial indirecto.
2.4 Comportamiento típico de una Grúa Viajera.
A continuación se muestra la simulación efectuada en Matlab simulink de la grúa viajera, en donde se muestran las trayectorias típicas de posición, velocidad y fuerza necesarias para que el movimiento de la grúa viajera sea suave
Como se muestra en esta figura 2.2, la trayectoria de posición va incrementándose de una forma suave, esto es, no hay cambios abruptos en la trayectoria de posición, esto con el fin de evitar oscilaciones bruscas en la carga.
INSTITUTO POLITÉCNICO NACIONAL ICA
38
La figura 2.3 muestra el comportamiento de la velocidad requerida por la grúa, como se observa, la velocidad se va incrementando en el intervalo de 0 s a 10 s, cuando se llega a la velocidad máxima en 10 s, la velocidad de la grúa va disminuyendo para que esta se pare.
Figura 2.3 Aceleración de referencia de la grúa viajera en m/s2.
En la figura 2.4 se muestra la fuerza aplicada al carro para que la grúa viajera llegue a la posición preestablecida. Cabe señalar que las trayectorias de las Figuras son para un desplazamiento de 10 m en un tiempo de 14.3 s. Asimismo, la fuerza de la Figura es cuando se considera una carga de 10 kg.
INSTITUTO POLITÉCNICO NACIONAL ICA
39
CAPÍTULO 3
DISEÑO DE LA INTERFAZ GRÁFICA DE
LA GRÚA VIAJERA
INSTITUTO POLITÉCNICO NACIONAL ICA
40
3.
DISEÑO DE LA INTERFAZ GRÁFICA DE LA GRÚA
VIAJERA
3.1 ¿Qué se entiende por ambiente Gráfico?
Un ambiente gráfico presenta al usuario elementos de fácil reconocimiento, que sirven para efectuar todo tipo de operaciones, lo que hace mucho más sencillo el uso de la computadora personal. Otra característica de un ambiente gráfico es que se basa en el empleo de un sistema de menús a través de los cuales se identifican y seleccionan programas, comandos y opciones (Fourier García, M. 1998).
Resulta evidente que es mucho más fácil trabajar al seleccionar y activar iconos o elementos de un menú, que cuando se tienen que escribir comandos completos que exigen aplicar rígidas reglas de sintaxis. Es por esto que los ambientes gráficos, así como los programas de aplicación que corren bajo ellos y siguiendo el mismo formato, son actualmente la forma de comunicación entre el usuario y la máquina, es decir que son la interfaz preferida.
En cuanto a los programas de aplicación, es importante subrayar que cuando siguen el formato de la interfaz gráfica en la que corren, además de tener una presentación similar en cuanto a composición de pantallas y elementos como iconos, barras y menús, también permiten el intercambio de secciones de archivos. De esta forma, si un procesador de palabras y una hoja de cálculo corren en un mismo ambiente gráfico, parte de una hoja de calcula puede llevarse a un documento de proceso de palabras para incluirla en un informe; lo mismo se puede hacer con gráficos creados en la hoja de cálculo.
Una diferencia importante entre trabajar directamente desde el Sistema Operativo de una computadora personal o hacerlo desde un ambiente gráfico es que en el segundo caso existen muchas formas diferentes de realizar las diversas operaciones.
INSTITUTO POLITÉCNICO NACIONAL ICA
41
incapaces de actualizarse para adaptarse a los cambios que en este dinámico campo ocurren continuamente tanto en equipo como en software.
3.2 ¿Qué es Visual Basic?
La palabra "Visual" hace referencia al método que se utiliza para crear la interfaz gráfica de usuario (GUI). En lugar de escribir numerosas líneas de código para describir la apariencia y la ubicación de los elementos de la interfaz, simplemente puede arrastrar y colocar objetos prefabricados en su lugar dentro de la pantalla. Si se ha utilizado alguna vez un programa de dibujo como Paint, ya tiene la mayor parte de las habilidades necesarias para crear una interfaz de usuario efectiva (Tiznado, M.A. 2004).
La palabra "Basic" hace referencia al lenguaje BASIC (Beginners All-Purpose Symbolic Instruction Code), un lenguaje utilizado por más programadores que ningún otro lenguaje en la historia de la informática o computación. Visual Basic ha evolucionado a partir del lenguaje BASIC original y ahora contiene centenares de instrucciones, funciones y palabras clave, muchas de las cuales están directamente relacionadas con la interfaz gráfica de Windows. Los principiantes pueden crear aplicaciones útiles con sólo aprender unas pocas palabras clave, pero, al mismo tiempo, la eficacia del lenguaje permite a los profesionales acometer cualquier objetivo que pueda alcanzarse mediante cualquier otro lenguaje de programación de Windows.
Basic es un lenguaje muy difundido, porque es fácil de aprender y de utilizar, además de ser extraordinariamente potente gracias a haber evolucionado enormemente incorporando múltiples tipos de datos, la posibilidad de crear funciones y procedimientos, estructuras de control típicas de Pascal o C, orientación a objetos, etc. Gracias a esto, Visual Basic permite crear estas aplicaciones gráficas de una forma rápida y sencilla.
3.2.1 Antecedentes históricos.
INSTITUTO POLITÉCNICO NACIONAL ICA
42
llegaban a la impensable cifra de 10.000 por segundo y la memoria no pasaba de unos pocos Kbytes en toroides de ferrita.
La evolución del BASIC por los años 70 fue escasa, dado el auge que tomaron en aquella época lenguajes de alto nivel como el FORTRAN y el COBOL. En 1978 se definió una norma para unificar los Basic existentes creándose la normativa Basic Standard.
Con la aparición de los primeros ordenadores personales, dedicados comercialmente al usuario particular, allá por la primera mitad de los ochenta, el BASIC resurgió como lenguaje de programación pensado para principiantes, y muchos de estos pequeños ordenadores domésticos lo usaban como único sistema operativo (Sinclair, Spectrum, Amstrad).
Con la popularización del PC, salieron varias versiones del BASIC que funcionaban en este tipo de ordenadores (Versiones BASICA, GW-BASIC), pero todas estas versiones del BASIC no hicieron otra cosa que terminar de rematar este lenguaje. Los programadores profesionales no llegaron a utilizarlo, habida cuenta de las desventajas de este lenguaje respecto a otras herramientas (PASCAL, C, CLIPPER). El BASIC con estas versiones para PC llegó incluso a perder crédito entre los profesionales de la informática.
Las razones para ello eran obvias:
No era un lenguaje estructurado.
No existían herramientas de compilación fiables.
No disponía de herramientas de intercambio de información.
No tenía librerías.
No se podía acceder al interior de la máquina.
INSTITUTO POLITÉCNICO NACIONAL ICA
43
como un producto más dentro de la amplia gama de ficheros ejecutables que acompañan al sistema operativo, y aprovecha de él el editor de textos.
Esta versión del popular Basic ya es un lenguaje estructurado, lo que permite crear programas modularmente, mediante subrutinas y módulos, capaz de crear programas ya competitivos con otros lenguajes de alto nivel. Sin embargo llegaba tarde, pues los entornos MS-DOS estaban ya superados por el entorno gráfico Windows.
Sin embargo algo había en el Basic que tentaba a superarse: su gran sencillez de manejo. Si a esto se le añade el entorno gráfico Windows, el aprovechamiento al máximo de las posibilidades de Windows en cuanto a intercambio de información, de sus librerías, de sus drivers y controladores, manejo de bases de datos, etc. el producto resultante puede ser algo que satisfaga todas las necesidades de programación en el entorno Windows. La suma de todas estas cosas es Visual Basic. Esta herramienta conserva del Basic de los años 80 únicamente su nombre y su sencillez, y tras su lanzamiento al mercado, la aceptación a nivel profesional hizo borrar por fin el "mal nombre" asociado a la palabra Basic.
Actualmente se está comercializando la versión 6.0 de este producto. Desde su salida al mercado, cada versión supera y mejora la anterior. Dados los buenos resultados a nivel profesional de este producto, y el apoyo prestado por el fabricante para la formación de programadores, Visual Basic se ha convertido en la primera herramienta de desarrollo de aplicaciones en entorno Windows.
Han existido varias versiones de Visual Basic:
Cuando salió Visual Basic 1.0, Bill Gates los describió como "algo maravilloso..." y "que cambiaría la forma en que la gente utilizaba Windows". Visual Basic 2.0 era más rápido y más sencillo de utilizar.
Visual Basic 3.0 incorporó formas sencillas y potentes para acceder a las bases de datos más potentes.
INSTITUTO POLITÉCNICO NACIONAL ICA
44
de Visual Basic(de la 1 a la 4) compilaban a código-p. Lo que significaba la necesitad de realizar una llamada al motor en tiempo de ejecución, retrasando el tiempo de ejecución del programa.
Es obligado decir sin embargo, que Visual Basic sigue siendo Basic. No se pueden comparar sus prestaciones con otros lenguajes cuando deseamos llegar al fondo de la máquina y controlar uno a uno sus registros. No es ese el fin perseguido con VB y si es necesario llegar a esas precisiones será necesario utilizar otro lenguaje que permita bajar el nivel de programación, como Visual C++, o realizar librerías (DLL) que lo hagan. En la mayor parte de las aplicaciones, las herramientas aportadas por VB son más que suficiente para lograr un programa fácil de realizar y de altas prestaciones. Cuando el lenguaje no cubre una determinada área, siempre tendremos acceso a las API de Windows.
3.2.2 Características generales de Visual Basic.
Visual Basic es una herramienta de diseño de aplicaciones para Windows, en la que estas se desarrollan en una gran parte a partir del diseño de una interfaz gráfica. En una aplicación Visual Basic, el programa está formado por una parte de código puro, y otras partes asociadas a los objetos que forman la interfaz gráfica.
Es por tanto un término medio entre la programación tradicional, formada por una sucesión lineal de código estructurado, y la programación orientada a objetos (OCX). Combina ambas tendencias. Ya que no podemos decir que VB pertenezca por completo a uno de esos dos tipos de programación, debemos inventar una palabra que la defina: Programación Visual.
La creación de un programa bajo Visual Basic lleva los siguientes pasos:
Creación de una interfaz de usuario. Esta interfaz será la principal vía de comunicación hombre máquina, tanto para salida de datos como para entrada. Será necesario partir de una ventana (formulario) a la que le iremos añadiendo los controles necesarios.
INSTITUTO POLITÉCNICO NACIONAL ICA
45
Generación del código asociado a los eventos que ocurran a estos objetos. A la respuesta a estos eventos (click, doble click, una tecla pulsada, etc.) se le llama Procedimiento, y se genera de acuerdo a las necesidades del programa. Generación del código del programa. Un programa puede hacerse solamente con la programación de los distintos procedimientos que acompañan a cada objeto. Sin embargo, VB ofrece la posibilidad de establecer un código de programa separado de estos eventos. Este código puede introducirse en unos bloques llamados Módulos, en otros bloques llamados Funciones, y otros llamados Procedimientos. Estos Procedimientos no responden a un evento establecido a un objeto, sino que responden a un evento producido durante la ejecución del programa.
Visual Basic introduce un concepto nuevo de programación, y es necesario cambiar hasta el argot del programador.
3.2.3 Programación secuencial frente a programación bajo Windows.
No es necesario tener un profundo conocimiento de todos los detalles técnicos para conocer el entorno de Windows.
Una versión reducida del funcionamiento de Windows incluye tres conceptos clave: ventanas, eventos y mensajes.
Una ventana es simplemente una región rectangular con sus propios límites. Probablemente ya sabe que hay varios tipos de ventanas: una ventana Explorador en Windows, una ventana de documento dentro de su programa de proceso de textos o un cuadro de diálogo que emerge para recordarle una cita. Aunque éstos son los ejemplos más comunes, realmente hay otros muchos tipos de ventanas. Un botón de comando es una ventana. Los iconos, cuadros de texto, botones de opción y barras de menús son todos ventanas.
El sistema operativo Microsoft Windows administra todas estas ventanas asignando a cada una un único número identificador (controlador de ventana o hWnd). El sistema controla continuamente cada una de estas ventanas para ver si existen signos de actividad o eventos. Los eventos pueden producirse mediante acciones del usuario, como hacer clic con el mouse (ratón) o presionar una tecla, mediante programación o incluso
INSTITUTO POLITÉCNICO NACIONAL ICA
46
Cada vez que se produce un evento se envía un mensaje al sistema operativo. El sistema procesa el mensaje y lo transmite a las demás ventanas. Entonces, cada ventana puede realizar la acción apropiada, basándose en sus propias instrucciones para tratar ese mensaje en particular.
Como se puede imaginar, tratar todas las combinaciones posibles de ventanas, eventos y mensajes podría ser interminable. Afortunadamente, Visual Basic evita tener que tratar con todos los controladores de mensajes de bajo nivel. Muchos de los mensajes los controla automáticamente Visual Basic, mientras que otros se tratan como procedimientos de evento para su comodidad. Esto permite crear rápidamente eficaces aplicaciones sin tener que tratar detalles innecesarios.
En las aplicaciones tradicionales o "por procedimientos", la aplicación es la que controla qué partes de código y en qué secuencia se ejecutan. La ejecución comienza con la primera línea de código y continúa con una ruta predefinida a través de la aplicación, llamando a los procedimientos según se necesiten.
En una aplicación controlada por eventos, el código no sigue una ruta predeterminada; ejecuta distintas secciones de código como respuesta a los eventos. Los eventos pueden desencadenarse por acciones del usuario, por mensajes del sistema o de otras aplicaciones, o incluso por la propia aplicación. La secuencia de estos eventos determina la secuencia en la que se ejecuta el código, por lo que la ruta a través del código de la aplicación es diferente cada vez que se ejecuta el programa.
Puesto que no puede predecir la secuencia de los eventos, el código debe establecer ciertos supuestos acerca del "estado del mundo" cuando se ejecute. Cuando haga suposiciones (por ejemplo, que un campo de entrada debe contener un valor antes de ejecutar un procedimiento para procesar ese valor), debe estructurar la aplicación de forma que asegure que esa suposición siempre será válida (por ejemplo, deshabilitando el botón de comando que inicia el procedimiento hasta que el campo de entrada contenga un valor).