I
NSTITUTO
P
OLITÉCNICO
N
ACIONAL
E
SCUELAS
UPERIOR DEI
NGENIERÍAM
ECÁNICA YE
LÉCTRICA"
DESARROLLO DE UN SISTEMA DE DOSIFICACIÓN AUTOMÁTICO
DE ALIMENTOS PARA EQUINOS
"
Para obtener el Título de:
Ingeniero en Control y Automatización
Presentan:
Franco Guzmán Luis Fernando
Galicia Jiménez Jesús Rodolfo
Ostria Valle Diana
Asesores:
Ing. Guglielmi Ibarra Ulises
M. en C. Brito Barrera Leandro
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 1
CAPÍTULO 1
Dosificadores de Alimento para
Equinos
Un caballo de trabajo duro es aquel que t ienen un mínimo de t rabajo de 4 horas diarias y que realizan recorridos de aproximadamente de 100 kilómetros. Aquí consideramos también a los caballos de compet encias avanzadas en los que se requieren ent renamientos diarios para poder complet ar recorridos de más de 20km al galope. La siguiente gráfica nos enseña la ingest a que debe de tener:
Figur a1.1 AlimentacióndeCaballospar aCompet enciasAvanzadas
1.1.3
Car acter ísticasdelAlimento
Una buena alimentación sólo se det ermina con la experiencia la ración exact a, de acuerdo al tipo de caballo y las tareas que realiza, sin embargo debe t omarse como base que la cantidad diaria de ingest ión de un animal domest icado debe ser en peso a la cant idad que consumiría si se encont rara en libert ad.
[image:22.612.230.405.199.314.2]1.2
Proceso
de
Alimentación
Automático
Hoy en día, los nuevos mecanismos y formas de control nos acercan la posibilidad de tener un caballo en las afueras sin tener que ir t odos los días a darle la ración de alimento que necesita. Ya que se puede realizar el desarrollo de un sist ema dosificador aut omático de alimento, el cual nos permit irá darle al caballo las porciones a las horas más adecuadas. Con el dosificador automatizado, la costosa tarea de alimentar adecuadamente al caballo, queda supeditada al simple llenado de la tolva.
En muchas ocasiones los establos o boxes donde los animales se resguardan de la intemperie se encuentran en pleno campo y a distancias considerables del núcleo de población donde vivimos, est o nos obliga a desplazadnos diariament e una o varias veces para que el animal o animales reciban su ración de alimento adecuadamente.
1.2.1
Ti posdeComeder os
1.2.1.1
TolvaAut omáticaDosi ficador aEQUIMATIC [image:28.612.275.374.526.690.2]
programa el tiempo en segundos en que estará activado el motor a la hora programada. El tiempo que se establece es el mismo para los tres programas.
1.2.1.2
Dispensador Aut omáticodePiensos
Este es un dispensador automático de piensos para la aliment ación de ganado, caballos, perros, vacas, etcétera.
Figur a1.6 DispensadorAut omát icodePiensos
Funcionamiento,
Características
y
Capacidad
[image:30.612.231.409.224.418.2]1.2.1.3
Dispensador MOD-SATUR
El Dispensador M OD-SATUR para caballos, permit e ahorrar tiempo, combustible, preocupaciones, trabajo, etcétera por 80 céntimos de € al día durante un año. El Dispensador se repone cada 10 ó 15 días, dependiendo del t ipo de alimento que se ut ilice, además de que dispone de dos versiones para poder suminist rar aliment o a 1 ó 2 caballos. Ya que, si bien es sabido que poca cant idad de aliment o proporcionado muchas veces es lo mejor para el sistema digestivo del caballo.
Figur a1.7 DispensadorMOD-SATUR
Funcionamiento,
Características
y
Capacidad
[image:32.612.276.366.233.469.2]1.2.1.4
RoboHor se
X
(6-12-18caballos)Central robótica para 6, 12 ó 18 caballos, para el control de varias tolvas con una sola central, con alimentador 220 – 12 V, para batería 12 V – 44 Amp, para 6 comidas diarias, indicador de carga y voltímetro, fabricado en Acero Galvanizado.
Figur a1.8 RoboHor se X (6-12-18caballos)
Funcionamiento,
Características
y
Capacidad
Ø
Aprendizaje fácil y rápido de los animales.Ø
Facilita el trabajo y la distribución del tiempo, no hay que mezclar ni cargar con recipient es.Ø
Puede programarlo de diferentes formas y hacer un seguimiento adecuado de los dat os de aliment ación de los equinos, con la seguridad de que cada uno consuma la cant idad que necesita.Tipo
de
Control
[image:34.612.187.454.190.355.2]En función a estas características y al análisis realizado a los sistemas de dosificación existent es en el mercado, se plantea para el diseño del dosificador, un sist ema de dosificación por control de descarga con t olva, con lo cual la t olva t endrá la capacidad de albergar los 75 kilogram os de aliment o.
Para el sistema de cont rol, se t iene cont emplado gobernar las n-estaciones de servicio a partir de un cont rolador lógico programable (PLC), se decidió aplicar este tipo de controlador ya que frente a un micro controlador, este presenta la versatilidad de manejar señales estándar sin la necesidad de adecuación de las mismas, además de las funciones que present a y la posibilidad de adapt ar una pantalla de la misma serie para la implementación de una int erfaz hombre máquina que centralice las operaciones, con lo que se simplifica la tarea de implementación de la misma.
Para el control de descarga de la tolva se plantearon 5 posibles soluciones de las cuales solo una fue la que más se adapta a las necesidades del sistema en relación a los costos de implementación de la misma. A continuación se describe cada una de las posibles soluciones concluyendo con la seleccionada.
1.2.2.1
Cont r olconRetr oalimentación(GalgaExtensiomét r ica) [image:36.612.267.376.511.687.2]
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 1 9
Si bien es el método más exacto para aplicar, presenta el inconveniente de ser uno de los mas costos al implementar el sistema de galgas lo cual lo vuelve en un método poco atractivo para su implementación.
1.2.2.2
Cont r olconDosisFijaPr e-calculadaconN-veces
Est e mét odo ocupa un sistema de dos act uadores separadores, los cuales tienen un volum en especificado entre sus cuchillas y opera n-número de veces para proporcionar ese n-número de volumen en dosis fijada por el usuario.
Figur a1.10 DosisFijaPr e-calculada
Las desventajas que presenta este método, por una parte está el costo de la implementación de de dos act uadores lo que redit úa en la elevación del costo por la implement ación de un secuenciador, por otra parte tenemos la poca exactitud debida a las dosis fijas, además del estrés psicológico generado al animal producto del funcionamient o int ermitente de los actuadores.
1.2.2.3Contr olconCur vadeSeguimient oPr e-calculada
[image:37.612.254.381.255.445.2]Figur a1.11 Pr e-calculada sinSensordeNivel Figur a1.12 Pr e-calculadaconSensordeNivel
En cada una de sus versiones se present an ciertos inconvenientes, en el sensor de nivel variable la principal dificultad radica en el costo de este tipo de sensor y en el manejo de señales analógicas para el PLC, en el de alto nivel, la principal desventaja la presenta el hecho de no poder garantizar que el usuario necesariament e llene al límit e la tolva en cada operación. Además ambos com parten la particularidad del hecho de implementar un PLC con gran capacidad de memoria ya que la curva como t al se t endría que ingresar por un arreglo de matrices el cual dificultaría la operación.
1.3.2.4Contr olOn/ Off
Tempor izado [image:38.612.148.484.83.297.2]
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 2 1
Figur a1.13 On/ OffTempor izado Figur a1.14 SensorInfr ar r ojo
CAPÍTULO 2
Diseño del Sistema Dosificador
Automático de Alimento
Proponer los criterios de selección de una tolva con su mecanismo dosificador, con capacidad de 75 kilogramos, con el propósito de obtener una autonomía de 2 semanas para la manutención de un equino promedio.
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 2 5
En base a est a integración, el sistema de dosificación de aliment o se diseño para funcionar de acuerdo al el siguiente ciclo de operación:
Figur a2.1 Et apasdelPr ocesodeDosificación
Etapa de Suministro:
En esta etapa del proceso, el usuario procede a suministrar el alimento en la tolva. Además establece la dosis a administrar a través de la interfaz hombre máquina. Es en esta etapa en la que se establecen los tiempos que determinan la cantidad a dosificar y la hora en la que se debe entregar la dosis al animal.
Etapa de Control:
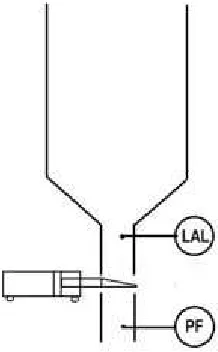
La etapa de control es en la cual el controlador (PLC) a partir los datos introducidos por el usuario en la int erfaz (HM I) en la etapa de suminist ro, determina est os tiempos para enviar la señal de cont rol al solenoide de la válvula de control elect roneumático. Por seguridad el sistema consta de un permisivo de bajo nivel, este es activado cuando se agot a el aliment o dent ro del dosificador o en ausencia de este último en el mecanismo dosificador, por lo que el PLC envía una señal de alarma al usuario indicándole que verifique la veracidad de la alarma.
Etapa Dosificación:
Sección de Descarga:
-
Área 5 x 6 cm-
Alt ura 7 cm Excent ricidad 0 “ Cero”Doblez de m ontaje de 44.5 mm (1” ¾) libre del área mayor por 25 mm de longitud de la pestaña.
Figur a2.2 Per spect ivadelaTolvadelSist emadeDosificaciónPr opuest o
En base a estas característ icas se t iene que el volumen de la tolva es igual a:
-
Deposito 90 litros-
Sección de convergencia y descarga 15 litrosCon lo que se obtiene capacidad de almacenamient o tot al de la tolva aproximadament e igual a 105 litros.
Dado que el pelet izado que se maneja posee una densidad aproximadamente 0.709 Kg/ litros, se t iene que la capacidad aproximada en kilogramos para la tolva es igual a:
[image:46.612.256.394.246.377.2]mediant e la eliminación de impurezas, regulación del mismo y lubricación para protección de las partes móviles del sistema.
El sistema de distribución se encarga de realizar la distribución de aire a los equipos de operación, en nuestro caso se concreta un sist ema de tipo abierto ya que permite la posibilidad de expansión de nuevos equipos.
A su vez, cada sistema mínimo para cada comedero se encuentra conectado a esta red de distribución. El sistema mínimo de operación de cada comedero se int egra por un actuador de doble efect o gobernado por una válvula de tipo solenoide el cual es act ivado por la señal de cont rol emit ida por el PLC.
[image:50.612.106.537.319.546.2]El otro tipo de fuente de alimentación para los compresores de aire, es la gasolina. Esta fuente de alimentación se utiliza en zonas en las que es difícil encont rar a un suminist ro de elect ricidad, pero este no es el caso.
Al elegir un compresor de aire, se considera que su fuente de energía sea la de más fácil acceso. En la mayoría de los casos, la opción más común es la energía eléct rica.
[image:52.612.237.407.439.621.2]En síntesis y con base en las consideraciones anteriores el compresor seleccionado es un compresor de aire M ilwaukee M IL2525, en la Tabla 2.1 se observa las caract erísticas técnicas del equipo.
Tabla 2.1 Compresor de Aire M ilwaukee M IL2525
Datos Técnicos
M otor Capacidad del
Tanque
Velocidad de
Funcionamiento Caudal del Aire
Presión M áxima de Trabajo
2.5 HP 25 litros 2.800 RPM 196 litros/ minuto 8BAR – 116 PSI
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 3 5
2.3.2.1
UnidaddeMant enimient o
Las unidades de mantenimiento para aire comprimido se componen generalmente de tres element os:
ü
Filt ro para aire.ü
Regulador de presión.ü
Lubricador.Figur a2.5 UnidaddeMantenimientoFLR
Los filt ros del aire comprimido retienen las part ículas sólidas y las got as de humedad cont enidas en el aire. Los filtros t ienen doble función:
Ø
El aire al ent rar pasa a través de placas que fuerzan una circulación rotat iva, así las grandes partículas sólidas y el líquido se depositan en las paredes del vaso o copa, por la acción cent rífuga.Ø
El aire at raviesa el element o filtrant e principal, de malla metálica, papel, o met al sint erizado. Este filtro posee un espesor de entre 20 a 40 micrones y es el encargado de retener las partículas sólidas. Esta acción de filtrado se denomina "mecánica" ya que, afecta a la contaminación mecánica del aire, y no a su contenido de humedad.periódicament e, ya que de lo cont rario podría ser arrastrado por la corriente del aire comprimido al circuito.
Los filtros más finos, de hast a 0.01 micras, se encargan de filt rar las partículas más pequeñas e incluso mínimas got as de agua que pudieran quedar en el aire comprimido.
La Válvula Reguladora o Regulador de presión mantiene la presión de t rabajo const ant e en el lado del usuario, independientement e de las variaciones de presión en la red principal y del consumo. Se debe tener presente que la presión de entrada del regulador debe ser siempre superior a la de trabajo. El Lubricador del aire comprimido tiene la import ant e función de lubricar de m odo suficient e a todos los elementos neumáticos, en especial a los activos.
El aceite que se ut iliza en la lubricación es aspirado de un pequeño depósit o de la misma Unidad de M antenimiento, mezclado con la corrient e del aire comprimido, y distribuido en forma de " niebla" o micro pulverización.
Tabla 2.2 Cilindro de Doble Efecto (PRA/ 182000)
Datos Técnicos
Fluido Funcionamiento Presión de
t rabajo Temperatura de trabajo
Aire comprimido filtrado con o sin
lubricación
PRA/ 182000 Amortiguación
regulable
1 a 16 bar
-20°C + 80°C máx.
PRA/ 182000/ M
Embolo magnético, amortiguación
regulable
Consultar a nuestro Servicio Técnico para
temperaturas inferiores a +2°C
M ateriales
Camisa Tapas Vást ago
(M artensit ico)
Junt as del vástago
Junt as del embolo
Junt as toricas
aluminio anodizado aluminio inyectado acero inoxidable poliuretano poliuretano goma nitrilica
[image:56.612.69.573.95.360.2]“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 3 9
2.3.4
Elect r oválvulaNor gr en
Una electroválvula está diseñada para controlar el flujo de un fluido a t ravés de un conduct o como puede ser una t ubería. La válvula est á cont rolada por una corriente eléct rica a t ravés de una bobina selenoidal.
Una elect roválvula t iene dos part es fundamentales: el solenoide y la válvula. El solenoide conviert e la energía eléctrica en energía mecánica para que actúe la válvula.
Existen varios tipos de elect roválvulas. En algunas elect roválvulas el solenoide actúa directamente sobre la válvula proporcionando toda la energía necesaria para su movimiento. Es común que la válvula se mant enga cerrada por la acción de un muelle y que el solenoide la abra venciendo la fuerza del muelle. Esto quiere decir que el solenoide debe est ar activado y consumiendo energía mientras la válvula deba estar abierta.
La elect roválvula seleccionada es una Norgren 5/ 2 normalment e abierta, destinada a alimentar el cilindro neumát ico del sist ema dosificador de alimento, la válvula cuent a con un regreso por muelle y un accionamiento por solenoide a 24 VDC, se requiere una válvula de este tipo para cada uno de los comederos aut omát icos.
Figur a2.8 VálvulaNeumát icaNor gr en
2.3.5
Accesor iosNeumáticos [image:57.612.225.410.479.564.2]
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 1
al operario. Gracias a la movilidad de las partículas en él cont enidas, no hay riesgo de obt uraciones debidas a las impurezas o part ículas de aceite presentes en el aire de escape, garant izando así la estabilidad del caudal.
[image:59.612.225.414.174.323.2]“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 3
Sus caract eríst icas son:
Ø Preconfigurados de programación 1K y memoria de dat os: La facilidad de configuración de ayuda (bit, entero, temporizadores, contadores, et cétera).
Ø Procesamient o rápido: Permite un tiempo de procesamient o típico de 1.5 ms para un programa de instrucción 500.
Ø Incorporada en la memoria EEPROM : Retiene t oda la lógica de escalera y los datos si el cont rolador pierde el poder, eliminando la necesidad de la bat ería hacia arriba o por separado del módulo de memoria de devolución.
Ø RS-232 de Canal de Comunicación: Permite una conect ividad sencilla a un ordenador personal para el programa de carga, descarga y la vigilancia a t ravés de protocolos múltiples, incluyendo DF1 Full Duplex.
Ø Esclavo RTU protocolo de apoyo: El uso DF1 Half-Duplex de esclavos, que permite hasta 254 notas para comunicarse con un solo maestro que utilizan m ódems de radio, líneas arrendadas módems o enlaces ascendentes por satélite.
A cont inuación se muestra los diagramas de conexión del PLC M icro Logix 1000:
Figur a2.11 Diagr amadeConexión
2.4.2
Int er fazHumano-Máquina
La int erfaz de usuario o int erfaz humano-máquina es el medio con que el usuario puede comunicarse con una máquina, un equipo o una computadora, y comprende t odos los punt os de contacto entre el usuario y el equipo, normalmente suelen ser fáciles de entender y fáciles de accionar.
Las interfaces básicas de usuario son aquellas que incluyen element os como menús, ventanas, teclado, ratón, algunos sonidos que la computadora hace, y en general, todos aquellos canales por los cuales se permite la comunicación entre el ser humano y la computadora. La mejor interacción humano-máquina a través de una adecuada int erfaz (Interfaz de Usuario), que le brinde tant o comodidad, como eficiencia.
Dentro de las Interfaces de Usuario se puede dist inguir básicamente t res t ipos:
A) Una int erfaz de hardware, a nivel de los dispositivos ut ilizados para ingresar, procesar y entregar los dat os: teclado, ratón y pant alla.
Point -Access/ Display Funt ion. Permit e supervisar o modificar ficheros de dat os en SLC o en cont roles de PLC. Use esta función para el sistema y ajustar los programas de aplicación
Figur a2.12 DisplaydelaInt er fazdeUsuar io
Algunas de las caract erísticas más sobresalient es del DTAM M icro son:
Ø
Display.- La pantalla del Display utiliza 2 líneas por 20 caract eres que usan un alto contrastede t ecnología LCD.
Ø
Teclado numérico (key pad).- El teclado numérico es separado por el color en gruposfácilment e identificados o funciones. En la adición, cada llave t iene un domo levant ado en el cent ro para proporcionar la regeneración táct il. El teclado numérico es diseñado para las operaciones manuales, la ut ilización de cualquier otro objet o o instrument o puede dañar t eclado.
Ø
LED indicador.- El LED de encendido en la esquina superior izquierda de la pant alla indica la [image:64.612.165.470.145.351.2]“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 7
[image:65.612.110.533.117.668.2]“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 9
2.4.4
Comunicación
Conexión entre la Computadora y el M icro Logix 1000
La comunicación entre nuestra com putadora y el PLC M icro Logix 1000, se efectúa utilizando un cable RS-232 (D9), con t erminal en mini DIN de 8 pines con la siguient e configuración:
[image:67.612.161.480.198.527.2]Comunicación de la Pantalla DTAM M icro al M icro Logix 1000
Para comunicar la pantalla DTAM M icro con el PLC, M icro Logix 1000 se utiliza un cable de comunicación RS-232 macho con un cable mini DIN de 8 pines para la entrada al PLC, con la siguiente configuración.
Figur a2.16 Configur acióndelCabledeComunicaciónRS-232(D9)
[image:68.612.160.486.193.504.2]“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 5 1 Comunicación de la Pantalla DTAM M icro y la Computadora
Para la descarga y carga de datos de la Pantalla DTAM con la PC, se utiliza un cable RS-232 para transferir aplicaciones con la siguient e configuración:
Figur a2.17Tr ansfer enciaconelCabledeComunicaciónRS-232(D9)
RSLogix 500
RSLogix 500 es el software dest inado a la creación de los programas del autómata en lenguaje de esquema de contactos o t ambién llamado lógico de escalera (Ladder). Incluye editor de Ladder y verificador de proyect os (creación de una list a de errores) entre otras opciones. Este product o se ha desarrollado para funcionar en los sist emas operativos Windows.
Figur a2.18 Ambient eVisualdelRSLogix500
Ø
Barra de M enú.- permit e realizar diferentes funciones como recuperar o guardar programas,opciones de ayuda, etc. Es decir, las funciones elementales de cualquier soft ware act ual.
Ø
Barra de Iconos.- engloba las funciones de uso más repet ido en el desarrollo de los programas.Ø
Barra de Est ado del Procesador.- Nos permite visualizar y modificar el modo de trabajo delprocesador (online, offline, program y remote), cargar y/ o descargar programas (upload/ download program), así como visualizar el cont rolador utilizado (Ethernet drive en el caso actual).
Ø
Barra de Inst rucciones.- Esta barra le permitirá, a través de pestañas y botones, acceder deforma rápida a las instrucciones más habit uales del lenguaje Ladder. Presionando sobre cada instrucción, ésta se int roducirá en el programa Ladder.
Ø
Vent ana del Programa Ladder.- Cont iene todos los programas y subrutinas Ladder [image:70.612.99.540.93.358.2]2.4.5
Diagr amadeConexión Eléctr ico
[image:72.612.144.497.185.679.2]
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 5 5
CAPÍTULO 3
Algoritmo de Control
Programar el algoritmo de control para el controlador lógico programable que gobierne el circuito de control electro-neumático a partir de las especificaciones que el cliente requiera para cada equino.
3.2.2
Descr ipcióndelaPr ogr amación delAlgor it modeCont r ol
El M icro Logix 1000 fue programado bajo las siguient es inst rucciones, están constan de 3 subrutinas y el M ain Program (programa principal).
En la Figura 3.1 se visualiza el programa principal y las 3 subrutinas, así como un pequeño resumen de lo que realizan dichas subrutinas.
[image:76.612.125.494.233.552.2]“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 6 3
3.2.2.3
Alar ma(LAD4) [image:81.612.113.516.406.681.2]
En la siguient e subrutina se manejan las alarm as de bajo nivel de alimento de cada tolva, es la subrutina encargada de mandar la señal a los usuarios para rellenar las t olvas. En la Tabla 3.3 se encuentran los comandos empleados y en la Figura 3.4 se observa la segunda subrut ina en RSLogix.
Tabla 3.3 Comandos de la Segunda Subrutina
Tipo Descripción
Salidas
O:0/ 0 Encargada de activar la señal de alarma por bajo nivel.
Entradas
I:0/ 1 Entrada correspondiente a la señal de bajo nivel de alimento de la t olva 2.
I:0/ 2 Entrada correspondiente a la señal de bajo nivel de alimento de la t olva 2.
I:0/ 3 Entrada correspondiente a la señal de bajo nivel de alimento de la t olva 2.
I:0/ 4 Entrada correspondiente a la señal de bajo nivel de alimento de la t olva 2.
I:0/ 5 Entrada correspondiente a la señal de bajo nivel de alimento de la t olva 2.
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 6 5
[image:83.612.106.543.112.638.2]
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 6 7
3.3.1
Descr ipcióndelaPr ogr amación delaDTAMMicr o
Para la programación de la Pantalla DTAM M icro se utilizó un software dado por los fabricantes, el que trabaja en sistema M S-DOS, pudiendo programar 263 pantallas, existen tres t ipos de pantallas, las de sub-menús (Figura 3.6 y Figura 3.7), para visualizar datos y para ingresar dat os.
Figur a3.6 Pant alladelDTAMMicr o
La Figura 3.7 es una muest ra de la pant alla que aparece en nuest ro soft ware para crear y modificar las pantallas de nuest ro programa.
Figur a3.7 AmbientedePr ogr amacióndelDTAMMicr o
Figur a3.7 AmbientedePr ogr amacióndelDTAMMicr o
[image:85.612.182.461.198.321.2] [image:85.612.133.505.403.677.2]Figur a3.8 Diagr amadeConexióndelasPant allasdelDTAMMicr o
[image:86.612.98.542.87.411.2]Las teclas de acceso directo (Figura), están direccionadas para visualizar el valor de cada horario programado para el suminist ro del alimento.
Tabla 3.5 Funciones de las Teclas de Acceso Directo
Visualizar la hora en que está programada la primera ración.
Visualizar la hora en que está programada la segunda ración.
Visualizar la hora en que est á programada la tercera ración.
[image:86.612.113.521.518.676.2]CAPÍTULO 4
Cotizaciones
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 8 5
13 × 8
645.00 = 112
385.00
M eses * Gastos de Alimentación M anual
[image:103.612.63.578.279.632.2]Un beneficio que se reflejara de inmediat o al cambiar el sistema de dosificación a aut omático será una mejor calidad de vida para los animales y el propio client e, disminuyendo las problemát icas que presenta la actividad de la dosificación manual de alimento, como se muestra en la Tabla 4.9.
Tabla 4.9 Comparativa de Costos y Beneficios entre EQUS & EQUIM ATIC
EQUS EQUIM ATIC
10 x 10,251.00 = 102,510.00 10 x 10,308.72 = 103,308.00
·Capacidad de 60 kilogramos.
·10 Horarios distintos de raciones.
·Unidad Central para manipular todas las tolvas instaladas. ·Precisión en la dosificación del 96%.
·Alarma por bajo nivel de aliment o.
·Previene choques eléctricos al trabajar neumáticamente.
·Capacidad de 40 kilogramos.
·3 Horarios distintos de raciones.
·Cada tolva tiene que programable individualmente.
dosificador de alimento, su función principal consiste en almacenar el alimento que se suministrara al equino. Está conformado por dos secciones, el depósito y la de convergencia y descarga.
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 9 7
Foto Nº 3.-M ecanismo Dosificador. El mecanismo dosificador funge la función de una válvula de descarga NC en la tolva, es decir, controla el caudal de descarga de la tolva con dos posiciones: abierto y cerrado.
Foto Nº 4.-Compresor M ilwaukee M IL2525.
La producción del aire comprimido se lleva a cabo mediante la utilización de compresores que elevan la presión de mismo hasta el valor deseado.
Foto Nº 6.-HM I DTAM M icro.
El DTAM M icro permite a operadores supervisar y manipular datos de un proceso en tiempo real. Con una gran capacidad de memoria para almacenaje, información de configuración y programa de usuario, las pantallas son mantenidas en la memoria permanente que proporciona el almacenaje para aproximadamente 244 pantallas.
Foto Nº 7.-HM I DTAM M icro.