INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL ADOLFO LÓPEZ MATEOS
ANÁLISIS ELECTROMECÁNICO DE UNA
MÁQUINA DE INDUCCIÓN CON ROTOR
JAULA DE ARDILLA EMPLEANDO UN
MODELO DIGITAL
T E S I S
QUE PARA OBTENER EL TÍTULO DE:
I N G E N I E R O E L E C T R I C I S T A
PRESENTAN:
JESÚS SÁNCHEZ CORTÉS
OCTAVIO HERNÁNDEZ GUTIÉRREZ
DIRECTORES DE TESIS:
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL "ADOLFO LÓPEZ MATEOS"
T E M A D E T E S I S
QUE PARA OBTENER EL TITULO DE INGENIERO ELECTRICISTA
POR LA OPCIÓN DE TITULACIÓN ^ COLECTIVA y £XAMEN QRAL INDIVIDUAL
DEBERA(N) DESARROLLAR Q ^^ HERNÁNDEZ GUTIÉRREZ
C. JESÚS SÁNCHEZ CORTÉS
"ANÁLISIS ELECTROMECÁNICO DE TJNA MÁQUINA DE INDUCCIÓN CON ROTOR JAULA DE
ARDILLA EMPLEANDO UN MODELO DIGITAL"
ANALIZAR EL COMPORTAMIENTO DE UNA MÁQUINA DE INDUCCIÓN CON ROTOR JAULA DE ARDILLA EN UN MODELO DIGITAL A PARTIR DE LA DETERMINACIÓN DE SUS PARÁMETROS DE MANERA EXPERIMENTAL.
> DETERMINAR LAS INDUCTANCIAS DEL ESTATOR Y ROTOR UTILIZANDO EL MÉTODO DE FUNCIÓN DE DEVANADOS, APLICANDO CONDICIONES DE FRONTERA MAGNÉTICAS.
> OBTENER EL MODELO DE LA MÁQUINA DE INDUCCIÓN EN EL MARCO DE REFERENCIA NATURAL Y EN EL MARCO DE REFERENCIA qdO.
> PARAMETRIZAR LA MÁQUINA DE INDUCCIÓN CON ROTOR JAULA DE ARDILLA DE MANERA EXPERIMENTAL.
> SIMULAR EL COMPORTAMIENTO DE LA MÁQUINA DE INDUCCIÓN EN EL RÉGIMEN MOTOR Y GENERADOR EN SIMULINK DE MATLAB VERSIÓN 6.5, UTILIZANDO LOS PARÁMETROS OBTENIDOS EXPERIMENTALMENTE.
MÉXICO D.F., 16 DE ABRIL 2012. AS E S O R E S
M. EN C. téMA'EL -ATBINO PADILLA. M. EN C. MERCEDES LÁZARO GONZAGA.
Dedicatorias
A mis padres Federico Sánchez Ramírez por brindarme siempre su apoyo
y amor infinito en todo momento de mi vida y por siempre alentarme a
seguir adelante; y Gloria Luz Cortés Ríos por su apoyo incondicional en
cada instante que lo he necesitado, por tenderme siempre esa mano
confiable y saber escucharme. Finalmente aquí está el resultado de toda
una carrera trabajando juntos.
A Luis Héctor Sánchez Cortés por el apoyo y cariño de hermano que me ha
dado desde siempre y que tanto agradezco a Dios.
A todos aquellos que de alguna manera han sido parte importante en
momentos duros y alegres de mi vida, en especial a mis amigos Octavio
Hernández Gutiérrez, Alejandra Ruiz Merlos y Ulises Torres Islas.
JESÚS.
A mis padres, este es el resultado de la suma de todos los esfuerzos que
hemos hecho como familia, los amo.
A ese ser especial que siempre ha velado por mí y me ha abierto los
caminos.
Agradecimientos
Al M. en C. Ismael Albino Padilla por compartir su talento y muy amplio
conocimiento ya que sin su ayuda y sus consejos la realización de este
trabajo no se hubiera logrado.
A la M. en C. Mercedes Lázaro Gonzaga por el apoyo que siempre me ha
brindado, por el conocimiento transmitido, por su entrega y amor a la
carrera además de ser una excelente consejera en momentos difíciles que se
presentan dentro y fuera de la escuela.
A todos los profesores que a lo largo de mi carrera ayudaron en mi
formación profesional.
JESÚS.
Quiero agradecer a mis padres Adriana Gutiérrez y Octavio Hernández
por apoyarme a lo largo de mi vida y por siempre darme las herramientas
necesarias para enfrentar los retos de la vida.
A la Profesora Mercedes Lázaro que además de tutora es consejera de la
vida compartiéndonos sus ensayos y errores en esos momentos de
desaliento y nublosa incertidumbre.
Al Profesor Ismael Albino por compartirnos sus grandiosos conocimientos,
Glosario de términos
Área [m2]
Campo magnético [Wb/m2]
: Fuerza electromotriz inducida [V]
⃗ Campo eléctrico [N/C]
⃗ Fuerza contraelectromotriz de línea a neutro [V] ⃗ Fuerza electromotriz inducida en el rotor [V]
Función en el marco natural
Fuerza electromotriz [V]
Fuerza magnetomotriz [AV]
Función qd0
Fuerza [N]
Frecuencia de la red [Hz]
Frecuencia del rotor [Hz]
Entrehierro [m]
Intensidad de campo magnético [A/m]
Momento de Inercia [s]
Corriente del rotor [A]
Corriente del estator [A]
Corriente de la fase a, b y c del rotor [A]
Corriente de la fase a, b y c del estator [A]
Corriente qd0 [A]
Corriente de arranque de una máquina de inducción [A]
Corriente base [A]
Corriente de corriente directa [A]
Corriente consumida de la red [A]
Corrientes parásitas [A]
Corriente en vacío [A]
Corriente aplicada por fase [A]
Corriente en el devanado del rotor [A]
Corriente en el estator [A]
Corriente de carga o de rotor estacionario [A]
Corriente en el devanado del rotor en estado dinámico [A]
Corriente de excitación [A]
Constante de inercia [kgm2]
Longitud [m]
Longitud de estator [m]
Longitud del conductor afectada por el campo magnético [m]
Inductancia de dispersión del rotor [H]
Inductancia de dispersión del estator [H]
Inductancia de magnetización [H]
Inductancia mutua entre fases del rotor [H]
Inductancia mutua entre fases del estator [H]
Inductancia propia del rotor [H]
Inductancia propia del rotor [H]
Inductancia propia del estator [H]
Inductancia propia del estator [H]
Inductancia propia de la fase a, b y c del rotor [H]
Inductancia mutua de la fase a, b y c entre rotor y estator [H]
Inductancia mutua de la fase a, b y c entre estator y rotor [H]
Inductancia propia de la fase a, b y c del estator [H]
Inductancia del rotor [H]
Masa del rotor [kg]
⃗⃗ Momento dipolar magnético [Am2] Número de fases
Velocidad del rotor [rpm] Función de conductores
Número de espiras
Número de vueltas del devanado del rotor
Número de vueltas del devanado del estator
Función de devanado del rotor
Función de devanado del estator
Velocidad síncrona [rpm]
Número de polos
Potencia de entrehierro [W]
Potencia de cortocircuito o de rotor bloqueado [W]
Potencia eléctrica [W]
Potencia de entrada [W]
Potencia mecánica [W]
Potencia mecánica interna [W]
Potencia de pérdidas del estator [W]
Potencia qd0 [W]
Potencia de pérdidas rotatorias [W]
Potencia de salida [W]
Potencia útil [W]
Potencia de pérdida en el cobre del estator [W]
Potencia de pérdida en el cobre del rotor [W]
Potencia de pérdida en el hierro [W]
Potencia en vacío [W]
Resistencia del rotor [Ω] Resistencia del estator [Ω]
Resistencia de carga en el eje del motor [Ω] Resistencia del devanado del estator [Ω] Resistencia del devanado del rotor [Ω]
Deslizamiento
Potencia base [VA]
Tiempo [s]
Par [Nm]
Par de amortiguamiento [Nm]
Par base [Nm]
Par electromagnético [Nm]
Par mecánico [Nm]
Par nominal desarrollado en la máquina [Nm]
Par desarrollado a tensión reducida [Nm]
Matriz de transformación qd0
Matriz de transformación qd0 para cantidades del rotor
⃗ Velocidad [m/s]
Velocidad con que se corta el campo magnético [m/s].
Tensión [V]
Tensión base [V]
Tensión de cortocircuito o de rotor bloqueado [V]
Tensión de línea a línea [V]
Tensión de paso del autotransformador [V]
Tensión del rotor [V]
Tensión del estator [V]
Tensión de corriente directa [V]
Tensión nominal del autotransformador [V]
Tensión aplicada por fase en el estator [V]
⃗ Tensión de línea del estator [V] Reactancia base [Ω]
Ancho de la espira [m]
Reactancia de magnetización [Ω]
Reactancia de dispersión del rotor referida al estator [Ω] Reactancia de dispersión del estator [Ω]
Reactancia de dispersión del estator [Ω]
Reactancia de dispersión del rotor en estado estacionario [Ω]
Reactancia de dispersión del rotor en estado dinámico [Ω] Impedancia de cortocircuito o de rotor bloqueado [Ω]
Impedancia del rotor [Ω]
Impedancia del rotor a frecuencia de deslizamiento [Ω]
Ángulo geométrico [°]
Eficiencia [%]
Ángulo de desfasamiento [°]
Flujo propio de fase [Wb]
Flujo magnético del rotor [Wb]
Flujo magnético del estator [Wb]
Flujo de la fase a, b y c del rotor [Wb]
Flujo de la fase a, b y c del estator [Wb]
Permeabilidad del medio [Wb/AVm]
Permeabilidad del aire = [Wb/AVm]
Ángulo de fase [°]
Flujo magnético [Mx].
Ángulo azimutal [rad]
Diámetro del rotor [m]
Velocidad mecánica base [rad/s]
Velocidad del rotor [rad/s]
´: Cantidades del rotor referidas al estator Cantidades qd0 en estado arbitrario
Cantidades qd0 en estado estacionario
R
esumen
La máquina de inducción en la industria se ha utilizado en su régimen
motor debido a su amplia aplicación. En los últimos años se ha tomado como
tema de relevancia la reducción de emisiones de gases invernadero por medio
de la implementación de energías renovables para la generación de energía
eléctrica; en este tema la máquina de inducción como generador se ha abierto
lugar debido a su bajo costo de producción, bajo mantenimiento así como su
alta confiabilidad. Por lo anterior se ha creado la necesidad de conocer más
del comportamiento de este tipo de máquinas en estado tanto estable como
transitorio.
En este trabajo se realizó un análisis de la parte eléctrica y mecánica de una
máquina de inducción con rotor jaula de ardilla en régimen motor y generador
en el marco de referencia qd0 estacionario, partiendo de la utilización de un modelo digital e implementando los parámetros obtenidos experimentalmente.
El modelo digital desarrollado por [Chee-Mun, 1998] en Simulink de Matlab
versión 6.5; permitió obtener el comportamiento de la máquina de inducción
mediante cuatro gráficas en función del tiempo (tensiones y corrientes del
estator, par electromagnético y velocidad del rotor). Los resultados obtenidos
fueron validados por medio de la comparación con el comportamiento de una
máquina previamente conocida. Una aportación es la obtención de las
inductancias de la máquina por el método de función de devanados.
El análisis de la máquina de inducción en su marco natural permite
encontrar fallas en el rotor, mientras que para un análisis de comportamiento
ÍNDICE
Página
Dedicatorias………..………
viii
Agradecimientos………...………
x
Glosario de términos………..…
xii
Resumen………. xviii
Capítulo 1 Introducción
1.1 Introducción...………..1
1.2 Antecedentes……….
1
1.3 Planteamiento del problema………
7
1.4 Objetivo general………
8
1.5 Objetivos particulares………
8
1.6 Justificación………..
9
1.7 Limitaciones y alcances………
10
1.8 Aportaciones de la tesis……….
10
1.9 Estructura de la tesis……….
11
Capítulo 2 Máquina de inducción
2.1 Introducción………..13
2.2 Definición y partes constitutivas………
13
2.2.1 Estator……….
14
2.2.2 Rotor……… 15
2.2.2.1 Rotor jaula de ardilla………... 15
2.2.2.2 Rotor devanado……….. 16
2.2.3 Carcasa……… 17
2.2.4 Flecha o eje………. 17
2.2.5 Tapas laterales……….. 18
2.2.6 Rodamientos o cojinetes……… 18
2.2.7 Escobillas……… 19
2.4.3 Operación en régimen generador………..…….. 23
2.5 Velocidad y deslizamiento………. 24
2.6 Circuito equivalente del motor de inducción trifásico………. 26
2.7 Circuito equivalente del generador de inducción trifásico…………. 31
2.8 Par y rendimiento de la máquina de inducción………. 32
2.9 Balance de potencias……….……. 39
Capítulo 3 Marcos de referencia
3.1 Introducción……….. 433.2 Modelo de la máquina de inducción de rotor jaula de ardilla en el marco natural……….……….. 43
3.3 Modelo de la máquina de inducción de rotor jaula de ardilla en el marco de referencia qd0en estado arbitrario……… 51
3.4 Modelo de la máquina de inducción de rotor jaula de ardilla en el marco de referencia qd0en estado estacionario….……….. 67
Capítulo 4 Parametrización de la máquina de inducción
4.1 Introducción……….. 694.2 Determinación de la resistencia óhmica……….. 70
4.3 Prueba de vacío……… 71
4.4 Prueba de rotor bloqueado……… 73
Capítulo 5 Simulación y análisis de resultados
5.1 Introducción……….. 795.2 Desarrollo del diagrama de simulación……… 79
5.3 Simulación de las máquinas de inducción………. 87
5.3.1 Simulación en régimen motor y análisis de resultados…….. 88
5.3.2 Simulación en régimen generador y análisis de resultados.. 92
Conclusiones y recomendaciones
Conclusiones………. 97Aportaciones a los escritores…..………. 98
Recomendaciones………. 99
Apéndice A Tipos de arranque y controles para
máquinas de inducción
A.1 Introducción……….. 105
A.2 Métodos de arranque……….. 105
A.2.1 Arranque estrella-delta………... 106
A.2.2 Arranque con autotransformador……… 106
A.2.3 Arranque con resistor primario……… 108
A.3 Control y regulación de velocidad……….. 110
A.3.1 Control de velocidad por cambio de número de polos………. 110
A.3.2 Regulación de la velocidad variando la frecuencia……… 112
A.3.3 Variando la tensión aplicada al estator………. 113
A.3.4 Variando la resistencia del circuito del rotor……….. 113
Apéndice B Determinación de los parámetros de la
máquina
B.1 Introducción……….. 115B.2 Prueba de CD para determinar la resistencia del estator………….. 116
B.3 Prueba de vacío………. 117
B.4 Prueba de rotor bloqueado……… 122
Apéndice C Determinación de las inductancias de la
máquina
C.1 Introducción……….. 127C.2 Condiciones de frontera………. 128
C.3 Determinación de las inductancias propias del estator………. 131
C.4 Determinación de las inductancias mutuas del estator………. 149
C.5 Determinación de las inductancias propias del rotor………. 155
C.6 Determinación de las inductancias mutuas del rotor………. 156
ACADEMIA DE ELECTROTECNIA 2011
CAPÍTULO 1
INTRODUCCIÓN
1.1 INTRODUCCIÓN
En este capítulo se presenta una breve visión al lector de los estudios
realizados con la máquina de inducción. Los trabajos desarrollados parten
del modelo matemático de la máquina pasando por la determinación de
sus parámetros, la utilización del modelo para la detección y diagnóstico
de fallas hasta la implementación de la máquina como generador eólico.
De igual forma se describe el problema que se está enfrentando así como
las metas que se pretenden alcanzar. También se enuncia el por qué se
desarrolla esta tesis.
1.2 ANTECEDENTES
Los motores eléctricos desempeñan un papel muy importante
proporcionando potencia para distintos tipos de aplicaciones. El tipo de
motor mayormente utilizado es el de inducción ya que una de las virtudes
que potencializan su alta utilidad es que necesitan poco mantenimiento y Nunca consideres el estudio como una obligación, sino como una oportunidad para penetrar en el bello y maravilloso mundo del saber.
Los trabajos desarrollados con la máquina de inducción van desde el
modelado de la máquina por medio de la obtención de parámetros hasta el
modelado de transitorios, pasando por la implementación de la máquina
como generador a sistemas eólicos. A continuación se presentan algunos
de los estudios que se han realizado.
En [Linsday, 1975] se presenta un trabajo en el cual se describe la
aplicación de una técnica para determinar los valores numéricos del
modelo del circuito de una máquina de inducción con rotor jaula de
ardilla. El modelo incluye los efectos de la saturación magnética de los
principales caminos del flujo y de fuga así como el efecto piel en las barras
del rotor. Todos los parámetros fueron medidos a diferentes niveles de
tensión por encima del nominal para demostrar el efecto de la saturación
magnética; en un segundo plano [Seok, 1997] presenta un nuevo enfoque
para identificar los parámetros de la máquina mediante un inversor PWM
(Pulse Wide Modulator). El método propuesto calcula la resistencia del
estator, rotor y constante de tiempo del rotor de la máquina; los cuales son
necesarios para el control de campo orientado. Utiliza sólo el inversor y su
ordenador de control; la prueba se puede realizar independientemente de
la carga mecánica de la máquina. Por lo tanto, este método hace posible la
aplicación de un inversor para cualquier rotor de inducción a pesar de que
los parámetros de la máquina se desconozcan. Para la verificación, el
algoritmo se implementó en dos sistemas inversores diferentes y su
viabilidad se vio confirmada por las pruebas. El resultado de las pruebas
mostró que el método propuesto puede estimar los valores de los
parámetros consistentemente, y las diferencias entre los valores de los
parámetros conocidos y los valores estimados con un intervalo de
diferencia de hasta el 20%.
1.2 Antecedentes
condiciones de una barra fracturada en el rotor y una en buen estado,
usando el modelo del elemento finito de la máquina. Este método es más
preciso, ya que está basado en la geometría real de la máquina y el modelo
de ésta puede ser fácilmente modificado en función del estudio de los
efectos y detección de las fallas en el desempeño de la máquina. Una
evaluación precisa de las inductancias contribuye al estudio y la detección
viable de las fallas.
Otro trabajo relacionado con la determinación de los parámetros es el
desarrollado por [Touhami, 2008] donde resalta que las pruebas llevadas a
cabo a la máquina de inducción permiten determinar la influencia del
efecto piel en la resistencia del estator. La máquina de inducción es
alimentada por medio de un variador de frecuencia. La prueba de estado
estacionario permite elaborar el esquema equivalente en el cual se
dedujeron los parámetros de corriente-tensión.
Así mismo los estudios relacionados con la máquina de inducción se han
enfocado a la identificación de las fallas por medio del modelado de éstas
en estado transitorio. En el trabajo desarrollado por [Devanneaux, 2001]
se menciona que una porción importante de las fallas en los motores de
inducción con rotor jaula de ardilla están relacionadas con el rotor. Un
modelo transitorio preciso de esta máquina bajo fallas en el rotor es
mostrado utilizando un enfoque de circuitos magnéticos acoplados. Todos
los parámetros son calculados desde la geometría real y la disposición de
los devanados en lugar de partir de variables equivalentes. El objetivo fue
la descripción detallada del procedimiento necesitado para implementar
este modelo preciso con resultados de simulación.
efectos en las cantidades mecánicas y eléctricas. Vale la pena resaltar que
muchas otras fallas pueden ser estudiadas con este modelo debido a su
exactitud y versatilidad.
Otra investigación realizada en donde se representa a la máquina
considerando las fallas internas es el que expone [Alemi, 2007], donde se
muestran los efectos de las anormalidades del rotor tales como las barras
fracturadas del rotor y la ruptura de la caja de conexiones. Las
características de la máquina de inducción son alteradas por las fallas
internas. Recientemente el modelado de las máquinas de inducción para el
análisis de las fallas de rotor está basado en el modelado de corrientes de
malla pero estos enfoques son muy complejos. El modelo puede calcular de
forma independiente la corriente en los anillos y las barras en condiciones
normales y de falla. Los resultados de la simulación muestran notable
control en las corrientes del estator trifásico, control de las armónicas de
baja frecuencia en las corrientes del estator y control en el par
electromagnético en estado permanente.
Existen algunas propuestas para la detección y el diagnóstico de fallas en
la máquina de inducción, donde [Kral, 2002] menciona la posibilidad de
integración de las técnicas de monitoreo en las fallas de rotor en la
máquina de inducción aplicada a las pruebas en lote. Técnicas
convencionales de monitoreo son diseñadas para condiciones de operación
de velocidad y cargas cercanas a las nominales. En estado estable el par
en el eje y las corrientes en el rotor son suficientemente considerables para
permitir el monitoreo del rotor. Por tanto las pruebas de cortocircuito son
aplicables para propósitos de diagnóstico.
El Método de Monitoreo de Viena (MMV) realizado por Karl ha sido
1.2 Antecedentes
datos espaciales conduce a un fuerte indicador de fallo. Resultados
experimentales y analíticos prueban que el método de monitoreo de Viena
es una prueba capaz de detectar fallas. Además el MMV fue
principalmente desarrollado para la detección de la asimetría del rotor; las
fallas en el devanado del estator también causan un índice significativo de
falla. Las asimetrías del devanado causan el mismo patrón de par y
corriente como consecuencia de un rotor bloqueado. Un procedimiento de
prueba adicional permite distinguir entre estas dos condiciones de falla.
Sin embargo, la aplicación propuesta es capaz de detectar asimetrías de la
máquina en la prueba de cortocircuito.
El diagnóstico de fallas por medio de la identificación de parámetros de la
máquina de inducción con rotor jaula de ardilla, utilizando datos reales
lleva a un modelo de identificación del parámetro eléctrico de la máquina
de inducción donde se observan las entradas y salidas del estator. Para
verificar experimentalmente lo anterior [Touhami, 2007] menciona que las
pruebas fueron realizadas a cuatro máquinas de inducción con rotor jaula
de ardilla especialmente construidas para el propósito del diagnóstico.
Todos los parámetros del modelo de la máquina son identificados por el
método de mínimos cuadrados. Los resultados experimentales muestran
buenas concordancias y confirman la posibilidad de detectar y localizar
fallas.
Entrando en el tema de la simulación de transitorios [Kang, 2005]
presenta un modelado y estudio de simulación para investigar el
comportamiento de las máquinas de inducción con rotor bajo fallas
internas. Este modelo está representado como un sistema de diferentes
ecuaciones, en donde la estructura real del motor es tomada en cuenta y
por la llamada matriz de conectividad, donde diferentes matrices significan
fallas diferentes.
Guiado en el mismo camino [Tu, 2008] presenta el modelo de la máquina
basado en un modelo de flujos, donde los flujos de magnetización del
devanado son directamente calculados por medio de la resultante de la
fuerza magnetomotriz del entrehierro, evadiendo así el uso de armónicas
debidas a la inductancia. Los efectos de la componente fundamental y
tercera armónica del flujo del entrehierro son incorporados en el modelo
por medio de los factores de saturación. Por otra parte, los efectos de
saturación son incorporados en la ecuación del par de la máquina,
permitiendo que en el modelo se investigue el desempeño de la máquina
bajo cualquier condición de la carga. Los parámetros de la máquina
incluyendo la saturación son obtenidos mediante las pruebas
convencionales de vacío y rotor bloqueado. El modelo propuesto es
validado mediante resultados experimentales de una máquina jaula de
ardilla y puede ser usado para predecir el comportamiento de la máquina
bajo cualquier condición ya sea estable o transitoria.
En los párrafos anteriores se mencionó enteramente el modelo de la
máquina en sus distintos enfoques; sin embargo, una de las grandes
aplicaciones que tienen este tipo de máquinas en el campo actual, es la
que [Soter, 2007] explica con el desarrollo de la máquina de inducción
como generador para turbinas eólicas desde la mitad del siglo veinte hasta
la actualidad. El primer paso fue acoplar la máquina directamente a la red,
el segundo fue ajustar la velocidad cambiando las máquinas jaula de
ardilla por máquinas de rotor devanado; esto para controlar la resistencia
del rotor consiguiendo así manipular el punto de operación de la máquina
y obtener un mejor desempeño con corrientes fuertes y débiles de viento.
1.3 Planteamiento del problema
convertidora de tensión bidireccional en el circuito del rotor con una
potencia nominal del 30% de la nominal del generador. Ahora es posible
cambiar la velocidad rotatoria y la potencia reactiva de manera
independiente en un amplio intervalo [Soter, 2007].
1.3 PLANTEAMIENTO DEL PROBLEMA
La máquina de inducción se emplea principalmente como motor en
bombas centrífugas, ventiladores, bombas de movimiento alternativo,
trituradores, compresores, cortadoras, cizallas, punzonadoras, ascensores,
montacargas, grúas, transportadores, etc. [Buitrón, 1984], sin embargo,
desde el punto de vista de generación se encuentra en centrales
aerogeneradoras, donde se puede hallar conectada en un sistema ya sea
aislado o máquina-bus infinito. También se emplea en algunas
hidroeléctricas pequeñas que se usan en sistemas aislados de tipo local. Si
se hace una comparación entre este tipo de máquinas y las máquinas
síncronas; las de inducción son sencillas, tienen bajo costo, menor
mantenimiento, carecen de fuentes de CD para su excitación, son más
robustas y cuentan con un mejor control para su velocidad.
Las máquinas de inducción se encuentran enfocadas principalmente en
temas como modelado, operación, estimación de parámetros y transitorios
con el objeto de mejorar y modificar su diseño, operación y fabricación. La
mayoría de los diseñadores y fabricantes de este tipo de máquinas
desarrollan sus diseños y emplean su manufactura en la aplicación de
nuevos materiales dieléctricos, sabiendo que son la parte más expuesta a
Debido a lo anterior, en esta tesis se hace uso del modelo de una máquina
de inducción trifásica con rotor jaula de ardilla utilizando el marco de
referencia qd0 mediante el uso de un programa de simulación digital y tomando como referencia los datos de parametrización a partir de
desarrollos experimentales con el fin de llevar a cabo un análisis del
comportamiento electromecánico como motor y generador.
1.4 OBJETIVO GENERAL
Analizar el comportamiento de una máquina de inducción con rotor
jaula de ardilla en un modelo digital a partir de la determinación de sus
parámetros de manera experimental.
1.5 OBJETIVOS PARTICULARES
Determinar las inductancias del estator y rotor utilizando el método
de función de devanados, aplicando condiciones de frontera
magnéticas.
Obtener el modelo de la máquina de inducción en el marco de
referencia natural y en el marco de referencia qd0.
Parametrizar la máquina de inducción con rotor jaula de ardilla de
manera experimental.
Simular el comportamiento de la máquina de inducción en el
régimen motor y generador en Simulink de Matlab versión 6.5,
1.6 Justificación
1.6 JUSTIFICACIÓN
Desde que la máquina eléctrica rotatoria apareció por primera vez en
una aplicación industrial, la humanidad se ha preocupado por darle
mantenimiento para que ésta permanezca funcionando correctamente.
La máquina de inducción en el régimen motor es la más ampliamente
utilizada en la industria (aproximadamente un 85% del total de las
máquinas son motores). Muchos de estos motores de gran capacidad se
utilizan en la industria minera, petrolera y del acero. La variante de jaula
de ardilla presenta la gran ventaja de ser un motor de construcción simple,
robusta, de bajo costo y que requiere un mantenimiento mucho menor que
cualquier otra máquina rotatoria al carecer de escobillas, colector de
anillos o colector de delgas [Soto, 2007].
Sin embargo en la actualidad, se hace más frecuente el empleo de la
máquina de inducción en el régimen generador, debido principalmente a
su menor costo y al ser muy noble en cuanto a su explotación y
mantenimiento, además de su alta confiabilidad. El uso de la máquina de
inducción en el régimen generador, provoca la necesidad de conocer cada
vez más el comportamiento de ésta, tanto en el régimen permanente de
operación como durante los procesos transitorios, ya sea como motor o
generador, para lo cual son de gran ayuda los modelos matemáticos y su
solución mediante el uso de computadoras. Para realizar el modelo de una
máquina que se posea físicamente ya sea en la industria o en el
laboratorio; y de la cual no se conozcan los datos de diseño, es necesario la
determinación de una serie de parámetros, además del modelo
seleccionado, lo cual se convierte en todo el desarrollo de un proceso que
1.7 LIMITACIONES Y ALCANCES
Limitaciones
El modelo matemático de la máquina no contempla los siguientes
fenómenos: saturación magnética, efecto de ranuras en el rotor, efectos de
flujo de dispersión en finales de bobina, ni controles externos de velocidad.
Alcances
Realizar un análisis electromecánico en un modelo matemático de una
máquina de inducción trifásica de 1 hp con rotor jaula de ardilla;
trabajando en régimen motor y generador mediante un programa digital a
partir de la determinación experimental de sus parámetros.
1.8 APORTACIONES DE LA TESIS
La obtención de un modelo matemático que involucra la
determinación de las inductancias del estator y rotor mediante el
uso de marcos de referencia, que permita a investigadores de la
carrera de Ingeniería Eléctrica así como a alumnos interesados en el
tema de generación involucrarse a través del análisis de máquinas
rotatorias.
1.9 Estructura de la Tesis
La determinación de las inductancias propias y mutuas de estator y
rotor, así como las inductancias mutuas entre éstos a partir de
condiciones de frontera.
Uso de la transformación de Park para la obtención del modelo
matemático de la máquina de inducción en qd0 para estado arbitrario y estacionario.
1.9 ESTRUCTURA DE LA TESIS
El capítulo uno trata de la estructura general de la tesis, se define el
planteamiento del problema junto con el objetivo general y objetivos
particulares, limitaciones y alcances. Los autores de esta tesis expresan en
la justificación las razones que crearon el interés por desarrollar este tema.
El capítulo dos aborda la teoría general del funcionamiento de la máquina
de inducción y se describen las partes elementales que la componen;
ocupando la máquina sobre la cual se desarrolla el análisis matemático y
experimental.
En el capítulo tres se desarrolla el modelo de la máquina de inducción con
rotor jaula de ardilla en el marco natural. Una vez obtenidas las
ecuaciones se realiza la transformación de Park para obtener el marco de
referencia qd0 arbitrario y posteriormente se iguala a cero la velocidad angular de los ejes q y d para llegar al marco qd0 estacionario; esto con el fin de obtener las ecuaciones que rigen el diagrama de simulación de la
El capítulo cuatro muestra los resultados obtenidos por las pruebas
establecidas para determinar los parámetros de la máquina de inducción.
Los fundamentos de las pruebas se localizan en el apéndice B al final de la
tesis.
En el capítulo cinco se desarrollan las simulaciones que describen el
comportamiento principal de las máquinas de inducción utilizando
Simulink de Matlab versión 6.5, en régimen motor y generador.
Comparando el comportamiento de una máquina conocida contra una
máquina que se desconocen sus parámetros y a la cual se le han
ACADEMIA DE ELECTROTECNIA 2011
CAPÍTULO 2
MÁQUINA DE INDUCCIÓN
2.1 INTRODUCCIÓN
En este capítulo se explica toda la teoría necesaria para comprender el
funcionamiento de la máquina de inducción así como sus partes
componentes y su función. Se obtienen los circuitos equivalentes de la
máquina trabajando como motor y como generador; además se hace un
análisis de las potencias que intervienen en el proceso de conversión
electromagnética desde el momento de energizar la máquina hasta que
llega en forma de potencia mecánica utilizable en el eje.
2.2 DEFINICIÓN Y PARTES CONSTITUTIVAS
La máquina de inducción o asíncrona se define como una máquina
eléctrica de tipo rotatorio que trabaja por efectos de inducción. El nombre
de asíncrona se refiere a que no tiene sincronismo en la velocidad de los
campos magnéticos del estator y del rotor; esto se debe a que el estator
produce un campo magnético giratorio cuya velocidad es diferente que la
que origina el rotor y no marcha a la misma velocidad. Cuando la Si te atrae una lucecita síguela. Si te conduce al pantano, ya saldrás de él. Pero si no la sigues, toda la vida te mortificarás pensando que acaso era tu estrella. .
Séneca-en Séneca-energía mecánica. Cuando la velocidad angular del rotor supera a la
velocidad angular del estator, la máquina trabaja como generador, es
decir, transforma la energía mecánica en energía eléctrica.
En toda máquina eléctrica existen partes principales como el estator y el
rotor y partes auxiliares como la carcasa, flecha, escobillas, tapas
laterales, rodamientos, entre otros; estos elementos se describen a
continuación [Gallegos, 2006].
2.2.1
Estator
Es la parte fija de la máquina, está constituido por núcleo y bobinas
como se muestra en la Figura 2.1. El núcleo está hecho de laminaciones
de acero al silicio con el objeto de reducir las pérdidas por histéresis y por
corrientes parásitas. Las laminaciones son circulares en máquinas de baja
capacidad, sin embargo en las de mayor capacidad, las laminaciones
circulares son seccionadas y se van superponiendo una a una hasta
formar la longitud de las ranuras que alojan al devanado de las fases
[Escutia, 2010].
El devanado está formado por varias bobinas de conductor de cobre y su
aislamiento puede ser clase A de cinta de papel o tela a base de material
orgánico e impregnado de barniz aislante o clase B donde el conductor se
forra con una cinta de mica o fibra de vidrio impregnadas por medio de
barniz a base de siliconas. Estas bobinas son prefabricadas y se montan
simétricamente en las ranuras del núcleo alrededor de los 360°
2.2 Definición y partes constitutivas
Figura 2.1 Estator.
2.2.2
Rotor
Es la parte de la máquina que recibe la acción del campo magnético
del estator y por lo mismo es donde se induce la fuerza electromotriz (fem).
Existen dos tipos de rotor, el rotor tipo jaula de ardilla y el tipo rotor
devanado.
2.2.2.1
Rotor jaula de ardilla
El rotor jaula de ardilla mostrado en la Figura 2.2 es el que más se
utiliza por su sencilla construcción y su gran producción ya que
eléctricamente casi nunca se llega a dañar. Se construye sobre la flecha de
la máquina a base de laminaciones de acero al silicio troqueladas, al igual
que el estator se van colocando una a una hasta lograr el cuerpo del rotor
con las ranuras donde se alojarán las barras de la jaula. El devanado se
forma con conductor de cobre o aluminio en forma de barra que se monta
eje con la finalidad de que las barras corten con mayor uniformidad al
campo magnético y su rendimiento se incremente [Gallegos, 2006].
Figura 2.2 Rotor jaula de ardilla.
2.2.2.2
Rotor devanado
El rotor devanado o de anillos rozantes mostrado en la Figura 2.3 se
construye de la misma manera que el rotor jaula de ardilla pero a
diferencia de usar barras como devanado, tiene tres bobinas de alambre
conectadas en estrella y sus extremos libres se conectan hacia el exterior
por medio de tres anillos montados en la flecha y aislados uno del otro. La
corriente que llega a los anillos es controlada a través de un reóstato
trifásico [Gallegos, 2006].
2.2 Definición y partes constitutivas
2.2.3
Carcasa
Es la cubierta de la máquina y sirve como soporte mecánico de las
partes componentes de la misma como se observa en la Figura 2.4. Se
fabrican con aletas disipadoras de calor de una aleación de aluminio dúctil
de alta resistencia mecánica. También existen carcasas sin aletas
disipadoras de calor fabricadas con hierro dulce lo que las hace muy
pesadas.
2.2.4
Flecha o eje
Es la parte central del rotor, normalmente es de acero y es donde se
montan y fijan las laminaciones del rotor. En su extremo se monta un
abanico que al giro de la máquina proporciona una corriente de aire que
enfría las partes internas debido a que las corrientes que circulan por los
devanados tienden a elevar su temperatura y a disminuir su rendimiento;
2.2.5
Tapas laterales
Sirven para cerrar la máquina eléctrica, se fijan firmemente a la
carcasa por medio de tornillos como se aprecia en la Figura 2.5. La función
que desempeñan es soportar a la flecha por medio de rodamientos que van
montados en la cavidad central de la tapa.
2.2.6
Rodamientos o cojinetes
Tienen la función de disminuir la fricción que origina la flecha al
girar, generalmente son baleros de bolas prelubricados y altamente pulidos
como el que se aprecia en la Figura 2.2. No requieren mantenimiento ya
que siempre hay una película de aceite alrededor de los rodamientos. Hoy
en día aún existen rodamientos de anillos que se lubrican cada
determinado tiempo cuando es de un anillo.
2.3 Principio de operación de la máquina de inducción
Cuando se emplean rodamientos de dos anillos de diferente diámetro,
estos se introducen en un depósito de aceite llamado chumacera; un anillo
soporta a la flecha y el otro de diámetro mayor gira por el movimiento de la
flecha sumergiéndose en el aceite y bañando al otro anillo [Gallegos, 2006].
2.2.7
Escobillas
Generalmente se fabrican de carbón con un determinado porcentaje de
grafito, teniendo en cuenta que a mayor grafito aumenta la dureza y la
resistencia eléctrica. En el caso de las máquinas de inducción con rotor de
anillos rozantes, las escobillas hacen posible la introducción de
resistencias externas por los anillos para limitar las corrientes de
arranque, mejorar las características del par y controlar la velocidad
[Fraile, 2008].
2.3 PRINCIPIO DE OPERACIÓN DE LA MÁQUINA DE
INDUCCIÓN
La máquina de inducción basa su funcionamiento en la ley de Faraday
conocida también como ley de inducción. Esta ley establece que si dentro
de un campo magnético se encuentra un conductor y existe un
movimiento relativo entre ellos, ya sea que el campo magnético se mueva y
el conductor quede fijo o viceversa, en cualquier caso en dicho conductor
se inducirá una fuerza electromotriz (fem). La fem inducida es de sentido
tal que se opone a la dirección de las líneas de campo magnético que la
Cuando se tiene una espira fija y es afectada por un campo magnético
móvil, la fem que se induce en ella es débil ya que la espira está formada
por un sólo conductor y depende también de la cantidad de campo
magnético. Si en lugar de una espira es una bobina de vueltas la que se
somete a un campo magnético potente, la fem inducida en las terminales
se incrementa en relación al número de espiras y a la tasa de cambio del
flujo magnético con respecto al tiempo ; por tanto si el movimiento del
campo magnético aumenta, también lo hace la fem inducida debido a que
el campo magnético incide mayor número de veces por segundo sobre los
conductores de la bobina [Albino, 2011, Stephen, 2006].
De aquí que la fem que se induce en el conductor depende del flujo
magnético , del número de espiras de la bobina y del tiempo de
incidencia, por lo que la ley de Faraday queda regida por la ecuación .
El campo magnético depende del flujo magnético, así como del ancho y
de la longitud de la espira que lo corta. Por tanto si se tiene un campo
magnético fijo y una espira o conductor lo atraviesa, se induce una fem en
él y ésta se expresa mediante la ecuación [Albino, 2011, Gallegos,
2006].
2.4 Formas de operación
Sustituyendo el campo magnético en la ecuación :
Debido a que la razón del ancho de la espira y el tiempo es una velocidad
, la ecuación final es:
2.4 FORMAS DE OPERACIÓN
Las máquinas de inducción pueden operar de tres maneras distintas,
ya sea como freno, como motor o como generador. En la Figura 2.6 se
muestran las tres zonas de operación de la máquina a través de la curva
par-velocidad. La diferencia entre cada funcionamiento depende
directamente del deslizamiento y esto influye en la potencia mecánica
interna , potencia de entrehierro y par electromagnético [Fraile,
Figura 2.6 Zonas de operación de una máquina asíncrona [Adaptado de
Rodríguez, 2008, Fraile, 2008].
2.4.1
Operación en régimen freno electromagnético
Este tipo de operación se produce para deslizamientos superiores a
uno como se aprecia en la Figura 2.6, lo que indica que la velocidad del
rotor es negativa o contraria a la de sincronismo. En esta condición el
rotor gira en sentido contrario al campo giratorio recibiendo energía de la
red y energía mecánica por el eje [Fraile, 2008]. Esto trae consigo que la
potencia mecánica interna sea negativa y la potencia de entrehierro sea
positiva. Por lo que en el entrehierro el flujo de potencia es como en un
motor, positiva del estator hacia el rotor; pero la potencia mecánica interna
es negativa o contraria a como es en un motor, la potencia viene del eje
hacia el rotor tal como sucede con un generador.
2.4 Formas de operación
el eje trae como consecuencia que al sumarse las potencias, la energía se
disipe en forma de pérdidas por efecto Joule [Rodríguez, 2008]. En la parte
superior de la zona de freno en la Figura 2.6 se puede apreciar que el
sentido de las velocidades en la máquina es contrario.
2.4.2
Operación en régimen motor
Este régimen de operación es el más característico de las máquinas
de inducción, ocurre cuando el deslizamiento se encuentra en un intervalo
entre uno y cero; lo que indica que la velocidad del rotor se encuentra
entre cero y la de sincronismo. Por lo tanto funcionando como motor, la
velocidad de la máquina es del mismo sentido que la de sincronismo y
menor que ésta a su vez; esto se puede observar claramente en la Figura
2.6 [Fraile, 2008, Rodríguez, 2008].
Por convención en el balance de potencias se adopta el criterio de signos
positivos para cuando la máquina opera en el régimen de motor. Por ello la
potencia mecánica interna y la potencia de entrehierro son positivas, lo
que quiere decir que la potencia eléctrica se absorbe del estator y pasa por
el entrehierro en dirección al rotor convirtiéndose en energía mecánica.
2.4.3
Operación en régimen generador
En esta zona de operación la máquina de inducción tiene
velocidades en el rotor superiores a la de sincronismo, por lo que se
decir, que lleven una dirección del rotor al estator. Esto significa un
cambio de sentido de la fem inducida provocando un cambio de sentido en
las corrientes y una inversión en el par. En este punto el par se convierte
en un par de frenado por lo que necesita una fuente externa que abastezca
de energía mecánica al eje logrando mantener una velocidad mayor a la
síncrona y entregando energía eléctrica en las terminales del estator. En la
Figura 2.6 en la zona de generador se observa que las velocidades van en
el mismo sentido pero la velocidad del rotor es mayor que la síncrona
[Fraile, 2008].
2.5 VELOCIDAD Y DESLIZAMIENTO
La fem inducida en una barra del rotor de una máquina asíncrona
depende de la velocidad del rotor y de la velocidad de los campos
magnéticos. Esto se debe a que de la tensión y la corriente del rotor
depende el comportamiento de una máquina de inducción. Para
comprender el movimiento relativo que existe entre el campo magnético
giratorio y el rotor se estudian dos parámetros importantes, uno es la
velocidad síncrona representada por la letra y el otro es el deslizamiento
representado por la letra [Stephen, 2006].
La velocidad síncrona es la velocidad con la que gira el campo magnético
del estator, se define por la frecuencia de la red y por el número de polos
de la máquina por lo que es constante [Stephen, 2006, Escutia, 2010].
2.5 Velocidad y deslizamiento
El deslizamiento es una expresión porcentual de la velocidad síncrona, o
bien, una fracción de la misma. Se define como la diferencia entre la
velocidad síncrona y la velocidad efectiva de rotación del rotor ; se
determina mediante la siguiente ecuación [Escutia, 2010].
El deslizamiento permitido no debe rebasar del 5% para motores
monofásicos y del 15% para motores trifásicos [Escutia, 2010].
El rotor tiene una frecuencia distinta a la de la red representada como ,
esta es una gran diferencia entre las máquinas rotatorias respecto del
transformador ya que este último mantiene la misma frecuencia en el
devanado primario y en el devanado secundario. Cuando el rotor está
bloqueado tiene la misma frecuencia que el estator; si el rotor gira a una
velocidad igual que la síncrona la frecuencia es cero debido a que no existe
deslizamiento. Por ello cuando el rotor gira con una frecuencia diferente a
la síncrona da lugar a un par y dependiendo del deslizamiento del rotor, la
máquina puede funcionar en cualquier régimen de operación. La
frecuencia del rotor se determina a partir de la siguiente expresión.
2.6 CIRCUITO EQUIVALENTE DEL MOTOR DE INDUCCIÓN
TRIFÁSICO
Para estudiar el comportamiento de la máquina de inducción se
requiere obtener su circuito equivalente ya que en éste es más fácil ver los
parámetros que influyen en su operación y cómo es que interviene cada
uno en su conducta desde el arranque hasta que se estabiliza.
Para obtener el diagrama eléctrico del motor asíncrono primero se deben
tomar en cuenta las condiciones del estator para obtener su circuito
equivalente y posteriormente agregar el circuito del rotor. La tensión que
toma el motor de la red inyecta las corrientes que crean el campo
magnético giratorio en el entrehierro y éste a su vez genera en las fases del
estator fuerzas contraelectromotrices ⃗ balanceadas que difieren de la
tensión en las terminales ⃗ debido a la caída de tensión por la impedancia
de su devanado.
⃗ ⃗
La corriente del estator se divide en dos componentes, una corriente de
excitación y una corriente de carga o de rotor en estado estacionario .
La corriente de excitación pasa por una rama en derivación la cual tiene
una resistencia que indica las pérdidas en el núcleo conectada en
paralelo con una reactancia que indica la magnetización del núcleo y
por las cuales circula respectivamente una corriente que se encuentra
2.6 Circuito equivalente del motor de inducción trifásico
Esta representación de las pérdidas en el núcleo es de alta resistencia y
muy baja reactancia por lo que la impedancia equivalente al estar en
paralelo es de un valor mucho menor que la reactancia de magnetización;
por lo anterior generalmente esta rama se considera despreciable [Escutia,
2010].
La corriente del rotor aparece en él por la interacción de los flujos
magnéticos en el entrehierro que afectan a las barras de la jaula
generando una fem y con ello se origina la corriente mencionada [Albino,
2011]. Como se puede observar en la Figura 2.7 el circuito equivalente del
estator de un motor de inducción.
Hasta este punto se ha analizado el estator completo y se tiene
conocimiento de la corriente que llega al rotor; por lo que ahora resta
analizar e incorporar el circuito del rotor para obtener el circuito
equivalente del motor de inducción.
Figura 2.7 Circuito equivalente del estator.
+
-R
1R
cI
1I
mX
mI
φI
2I
cX
1+
-E
2Visto desde el estator, el rotor en estado estacionario se representa
mediante una impedancia compuesta por la reactancia de dispersión
del devanado en serie con la resistencia de la jaula o devanado que
también por ley Ohm es:
⃗
Para determinar las corrientes y las tensiones en el rotor, éste se puede
cambiar por otro equivalente que tenga el mismo número de fases y
vueltas que el estator y que genere la misma fuerza magnetomotriz (fmm) y
flujo en el entrehierro para que las condiciones vistas desde el estator no
cambien. Así mismo al referir el rotor hacia el estator se debe considerar el
deslizamiento entre ellos para que las tensiones y corrientes a frecuencia
de deslizamiento del rotor real se encuentren inmersas en el rotor
equivalente estacionario a frecuencia del estator [Fitzgerald, 2004].
Para ello se deben obtener los parámetros del rotor real a frecuencia de
deslizamiento. Partiendo de que antes que el motor arranque ambas partes
(estator y rotor) de la máquina poseen las mismas frecuencias, se tiene que
la reactancia de dispersión del rotor es:
Para obtener esta reactancia a frecuencia de deslizamiento se hace una
2.6 Circuito equivalente del motor de inducción trifásico
finalmente la reactancia de dispersión del rotor referido a la frecuencia de
deslizamiento .
De esta manera la impedancia de dispersión del rotor a frecuencia de
deslizamiento es:
⃗
La corriente del rotor a frecuencia de deslizamiento es igual en
magnitud a la corriente del estator ya que la corriente es la corriente en
un rotor equivalente que tiene el mismo número de vueltas por fase que el
estator. La onda de fmm resultante en el entrehierro se debe a los flujos
mutuos creados por las corrientes en el estator y por las corrientes en el
rotor [Albino, 2011]. Tomando en cuenta que la onda de fmm resultante en
el entrehierro se compone de la suma fasorial de la corriente del estator y
la corriente del rotor equivalente, estas corrientes son iguales en fase en
sus respectivas frecuencias [Fitzgerald, 2004]. Por tanto se puede decir
que:
Puesto que la interacción de flujos en el entrehierro genera tanto una fem
⃗ en el rotor como una fuerza contraelectromotriz ⃗ en el estator, existe
una diferencia entre estas tensiones. La diferencia radica en el efecto de la
velocidad; así que para que estos potenciales sean iguales, la fuerza
contraelectromotriz se puede multiplicar por el deslizamiento.
⃗ ⃗
Por lo que ahora se tiene una nueva expresión para la impedancia del rotor
a frecuencia de deslizamiento.
⃗
Si se divide entre el deslizamiento se obtiene la impedancia del rotor
equivalente.
Finalmente se considera el efecto de la carga en el eje del motor a través de
una factorización en la ecuación .
( )
2.7 Circuito equivalente del generador de inducción trifásico
Figura 2.8 Circuito equivalente del motor de inducción.
En la ecuación se observa que aparece una resistencia denominada
que no afecta a la impedancia del rotor; sin embargo esta resistencia
representa la carga mecánica del motor a través del deslizamiento. En la
Figura 2.8 se muestra el circuito equivalente del motor de inducción.
2.7 CIRCUITO
EQUIVALENTE
DEL
GENERADOR
DE
INDUCCIÓN TRIFÁSICO
El circuito equivalente del generador de inducción es muy fácil de
explicar una vez que se ha determinado el circuito equivalente del motor
de inducción. Esto se debe a que el diagrama es prácticamente el mismo
como se puede apreciar en la Figura 2.9; con la diferencia de que para su
análisis, en la ecuación que determina la impedancia del rotor la
parte real es de valor negativo, lo que indica que ahora la corriente fluye
del rotor al estator.
+
-R
cI
1I
mX
mI
φI
2I
cX
1V
1R
1X
2R
2Figura 2.9 Circuito equivalente del generador de inducción.
El signo indica que la potencia va del rotor al estator. La razón por la
que de la ecuación es de valor negativo se debe al hecho de que la
máquina ahora opera en el régimen generador, y por ello el deslizamiento
es negativo [Wildi, 2007].
2.8 POTENCIA, PAR Y RENDIMIENTO EN EL RÉGIMEN
MOTOR Y GENERADOR
La ley de Lorentz dice que para que exista una fuerza sobre una
carga inmersa en un campo magnético, ésta debe llevar una velocidad.
El resultado es un desplazamiento perpendicular a las líneas de campo. De
aquí se deduce la ecuación que rige a la ley de fuerza de Lorentz.
⃗ ( ⃗ ⃗ ⃗ )
+
-R
cI
1I
mX
mI
φI
2I
cX
1V
1R
1X
2R
22.8 Potencia, par y rendimiento en el régimen motor y generador
Como se puede observar en la ecuación la fuerza de Lorentz se
deduce de la segunda ley de Newton, donde la masa es la carga y la
aceleración es la derivada de la velocidad de la carga respecto al tiempo.
Debido a que la fuerza que ejerce el campo eléctrico sobre la carga es muy
pequeña se desprecia reduciéndose la ecuación a:
⃗ ⃗
Si se hace en forma diferencial la expresión anterior se obtiene:
⃗ ⃗
Donde ⃗ por ser una velocidad se puede descomponer en una longitud por
unidad de tiempo.
⃗
Al reescribir la ecuación de tal forma que quede se obtiene la corriente
que circula a lo largo de un conductor.
⃗
Esta forma diferencial de la fuerza de Lorentz maneja una trayectoria , lo
que implica que ahora se estudia a un conjunto de cargas en lugar de una
sola. Si se integra dicha expresión sobre una trayectoria cerrada que
representa a una espira se obtiene una nueva expresión de la fuerza de
Lorentz.
∮ ⃗⃗⃗ ⃗
De acuerdo con la ley de Lorentz se puede determinar la fuerza que ejerce
un campo magnético uniforme sobre una espira inmersa en él y por la que
circula una corriente como la que se muestra en la Figura 2.10. Siguiendo
la trayectoria cerrada (a, b, c, d) de la espira, se requiere analizarla tramo
por tramo, es decir, cada lado de la espira.
Figura 2.10 Espira inmersa en un campo magnético uniforme.
z
By=B ay
l
a
b
c
d
F
2.8 Potencia, par y rendimiento en el régimen motor y generador
∫ ⃗⃗⃗ ⃗ ∫ ⃗⃗⃗ ⃗ ∫ ⃗⃗⃗ ⃗ ∫ ⃗⃗⃗ ⃗
Como ya se ha mencionado, para que una carga expuesta a un campo
magnético experimente una fuerza debe estar perpendicular a las líneas de
campo, por tanto los lados (a, b) y (c, d) de la espira no experimentan
fuerza alguna, quedando por analizar los lados (b, c) y (d, a).
∫ ⃗⃗⃗ ⃗ ∫ ⃗⃗⃗ ⃗
Integrando la ecuación se llega a la siguiente expresión:
̂ ̂
̂ ̂
Con este resultado se puede ver que la fuerza resultante es cero. Sin
embargo la dirección que lleva cada vector de fuerza es de sentido opuesto.
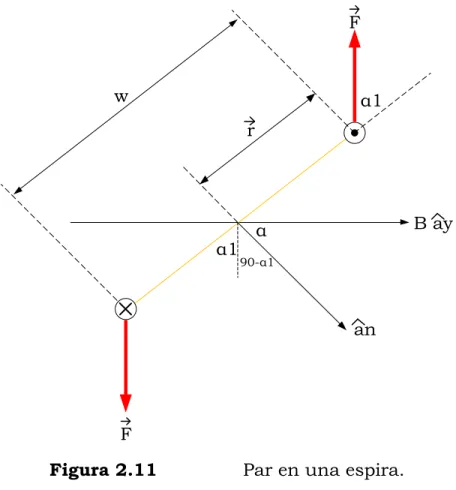
Esto se aprecia fácilmente en la Figura 2.11 donde se muestra la espira
experimentando la misma fuerza en direcciones contrarias, por tanto la
Figura 2.11 Par en una espira.
El par se define como:
⃗
El par en un extremo de la espira es:
| || | w
α α1
90-α1
F
F
r
B ay
α1
2.8 Potencia, par y rendimiento en el régimen motor y generador
Por tanto en el otro extremo de la espira el par es el mismo.
El par total en la espira es:
De acuerdo con la Figura 2.10 el producto del ancho de la espira por la
longitud de la misma es el área de la espira y se representa con la letra A.
Cuando se calcula el par para una bobina compuesta de N espiras, se
multiplica la ecuación por N quedando de esta forma una nueva expresión del par.
El momento dipolar magnético ⃗⃗ se representa por:
⃗⃗ ̂
Por lo tanto el par se puede reescribir como:
⃗⃗ ⃗
̂ ̂
̂ ̂
Obteniendo de esta manera finalmente la expresión para el par total:
La eficiencia o rendimiento que brinda una máquina se define como la
razón de la potencia de salida a la potencia de entrada; es decir, la
potencia mecánica que existe en la flecha entre la potencia eléctrica en el
estator. De aquí que la ecuación del rendimiento es:
2.9 Balance de potencias
2.9 BALANCE DE POTENCIAS
Desde el momento en que el motor asíncrono es energizado hasta el
momento en que entrega potencia mecánica en su eje, se ve involucrado en
un proceso de conversión de energía que está ligado a cada parte de él. Las
partes como el estator, entrehierro, rotor y rodamientos están ligadas
directamente con pérdidas de potencia al pasar de una parte a otra.
La potencia fluye del estator al eje en un motor, transformándose la
potencia eléctrica que absorbe de la red en potencia mecánica útil. La
potencia P1 se define como:
Donde es el número de fases de la máquina. Cuando esta potencia
llega al devanado del estator parte de ella se disipa por efecto Joule; esta
potencia se le conoce como potencia de pérdida en el cobre .
En el estator ocurre otra pérdida denominada potencia de pérdida en el
hierro y ésta se debe a la histéresis y corrientes parásitas del circuito
estas pérdidas se consideran despreciables. De tal modo que el primer
bloque de pérdidas de potencia en el motor asíncrono es la suma de las
pérdidas en el cobre y las pérdidas en el hierro.
La potencia que llega al entrehierro de la máquina se calcula como la
diferencia de la potencia que absorbe el motor del sistema menos la
potencia de pérdidas del primer bloque; por lo que se tiene:
El rotor por su construcción también presenta pérdidas por efecto Joule, lo
que da origen a la siguiente ecuación de las pérdidas en el cobre :
En este punto la potencia que resta es la que llega al eje del motor pero
aún sin salir de él. A esta potencia se le denomina potencia mecánica
interna ; en esta potencia se ve involucrada la resistencia de carga