Monterrey, Nuevo León, México a 28 de mayo de 2009.
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY
PRESENTE.-Por medio de la presente hago constar que soy autor y titular de la obra denominada "Detección de Fugas en una Tubería utilizando Redes Neuronales Artificiales", en los sucesivo LA OBRA, en virtud de lo cual autorizo a el Instituto Tecnológico y de Estudios Superiores de Monterrey (EL INSTITUTO) para que efectúe la divulgación, publicación, comunicación pública, distribución, distribución pública y reproducción, así como la digitalización de la misma, con fines académicos o propios al objeto de EL INSTITUTO, dentro del círculo de la comunidad del Tecnológico de Monterrey.
El Instituto se compromete a respetar en todo momento mi autoría y a otorgarme el crédito correspondiente en todas las actividades mencionadas anteriormente de la obra.
De la misma manera, manifiesto que el contenido académico, literario, la edición y en general cualquier parte de LA OBRA son de mi entera responsabilidad, por lo que deslindo a EL INSTITUTO por cualquier violación a los derechos de autor y/o propiedad intelectual y/o cualquier responsabilidad relacionada con la OBRA que cometa el suscrito frente a terceros.
Detección de Fugas en Tuberías Usando Redes Neuronales
Artificiales -Edición Única
Title
Detección de Fugas en Tuberías Usando Redes Neuronales
Artificiales -Edición Única
Authors
José Ignacio Barradas Castillo
Affiliation
Tecnológico de Monterrey, Campus Monterrey
Issue Date
2009-05-01
Item type
Tesis
Rights
Open Access
Downloaded
19-Jan-2017 00:18:56
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS
SUPERIORES DE MONTERREY
CAMPUS MONTERREY
PROGRAMA DE GRADUADOS EN MECATRÓNICA Y
TECNOLOGÍAS DE INFORMACIÓN
TECNOLÓGICO
DE MONTERREY
DETECCIÓN DE FUGAS EN TUBERÍAS USANDO REDES NEURONALES
ARTIFICIALES
TESIS
P R E S E N T A D A C O M O R E Q U I S I T O P A R C I A L P A R A O B T E N E R E L G R A D O A C A D É M I C O DE:
M A E S T R O E N CIENCIAS C O N E S P E C I A L I D A D E N A U T O M A T I Z A C I Ó N
POR:
J O S É I G N A C I O B A R R A D A S CASTILLO
I N S T I T U T O T E C N O L Ó G I C O D E E S T U D I O S S U P E R I O R E S D E M O N T E R R E Y
D I V I S I Ó N D E M E C A T R O N I C A Y T E C N O L O G Í A S I N F O R M A C I Ó N
P R O G R A M A DE G R A D U A D O S E N M E C A T R O N I C A Y T E C N O L O G Í A S D E I N F O R M A C I Ó N
Los miembros del comité de tesis recomendamos que la presente tesis del Ing. José Ignacio Barradas Castillo sea aceptada como requisito parcial para obtener el grado académico de Maestro en Ciencias con especialidad en Automatización.
Comité de tesis:
Dr. Luis Eduardo Garza Castańón Asesor
Dr. Francisco Palomera Palacios Sinodal
Dr. Rubén Morales Menéndez Sinodal
Dr. Joaquín Acevedo Mascarúa Director de Investigación y Posgrado
DETECCIÓN DE FUGAS EN TUBERÍAS USANDO REDES
NEURONALES ARTIFICIALES
POR:
JOSÉ IGNACIO BARRADAS CASTILLO
TESIS
Presentada al Programa de Graduados en Mecatrónica y
Tecnologías de Información
Este trabajo es requisito parcial para obtener el grado de Maestro
en Ciencias con especialidad en Automatización
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS
SUPERIORES DE MONTERREY
Dedicatoria
A mis padres, quienes con su ejemplo y apoyo incondicional, han colaborado siempre en la realización de mis metas, sin importar cuán complicadas parezcan. A mi hermano, José Carlos por su constante optimismo, por su apoyo y por el interés mostrado en mi tesis. A mis otros cuatro hermanos, Alicia, Corina, Paola y Nacho, por siempre creer en mí y brindarme su apoyo y ayuda incondicional. A mi abuela y tía Claudia, por su constante preocupación por mi bienestar. A la memoria de mi tía Corina, que siempre estará con nosotros.
Agradecimientos
Al Tecnológico de Monterrey y al Departamento de Mecatrónica y Automatización del campus Monterrey por haberme otorgado una oportunidad como asistente de docencia para poder realizar mis estudios de posgrado.
Al Dr. Luis Garza, quién con su interés en el proyecto y su guía como asesor, me guió para concluir exitosamente este trabajo.
A mis sinodales, el Dr. Francisco Palomera y el Dr. Rubén Morales, por el tiempo dedicado a la evaluación del proyecto así como por sus valiosos comentarios.
A la Dra. Cristina Verde, por el apoyo, sus comentarios y por la información facilitada.
A Juan Pineda, por todo su apoyo y enseńanzas durante mi estancia como asistente en los laboratorios de mecatrónica
A Amparo Herrera, por toda su ayuda y apoyo a lo largo de mi estancia en el departamento. A todos mis compańeros de la maestría, Celina Rea, Juan Carlos Tudón, Aldo Cedillo, Ernesto Pérez, Jorge Gamboa, Jorge Jiménez, Luis Carlos, Pablo Ordońez, Rodrigo Vargas, y Mario Claros, por su apoyo y por haber vivido el desarrollo de este trabajo conmigo.
A mis amigos, Sergio Elizondo, Daniela Morales, Alma Arjona, Ade Filigrana, Alfonso Tinoco, Mauricio Castro, Marcos Pineda, Fernando Jiménez, Tulio de Nova, Marbelia Tienda, Laura Wong, Elsie Flores, Cony Hernández, Tatiana Ledesma, Gabriela Revuelta, Israel Ruiz, y Elías Abugaber. Por aceptarme como soy, por su apoyo incondicional y por formar parte de esa familia que nos permitimos escoger.
Tabla de Contenido
Índice de Figuras ix
Índice de Tablas xii
Abreviaciones y Símbolos xiii
Capítulo 1. Introducción 1
1.1 Planteamiento del Problema 2
1.2 Objetivos 2 1.3 Justificación 2 1.4 Contribuciones 3 1.5 Alcances y Limitaciones 3
Capítulo 2. Detección de Fugas en Tuberías 4
2.1 Métodos y sistemas de detección de fugas en tuberías 4 2.2 Tareas y Clasificación General de los Métodos de Detección y Localización de Fugas 5
2.2.1 Métodos Directos 6 2.2.2Métodos Indirectos 6 2.2 Fuente de errores para varios métodos de detección de fugas 12
Capítulo 3. Fundamentos de Detección y Diagnóstico de Fallas 14
3.1 Introducción 14 3.2 Metodología de Diseńo de Algoritmos de Detección y Diagnóstico de Fallas 15
3.3 Clasificación de Fallas 16 3.4 Métodos de Detección y Diagnóstico de Fallas 17
3.4.1 Clasificación de los Métodos de Detección y Diagnóstico de Fallas 17
Capítulo 4. Fundamentos de Redes Neuronales 20
4.1 Concepto de Red Neuronal Artificial (RNA) 20 4.1.2 Beneficios de las Redes Neuronales Artificiales 21
4.2 Modelo de una Neurona Artificial 22 4.2.1 Tipos de Funciones de Activación 24
4.3 Arquitecturas de una Red 26 4.3.1 Redes Antealimentadas 26 4.3.2 Red Antealimentada Multicapa 27
4.3.3 Redes Recurrentes 28
4.4 Proceso de Aprendizaje 28 4.4.1 Clasificación de Procesos de Aprendizaje 29
4.5 Tipos de Redes Neuronales Artificiales 31
4.5.1Perceptrón 31 4.5.2 Peceptrones Multicapa 32
Capítulo 5. Detección de Fallas usando Redes Neuronales Artificiales 34
5.1 Introducción 34 5.2 Estructura Básica de un Sistema Neuronal de Diagnóstico de Fallas 36
5.3 Modelos Neuronales para el Modelado de Sistemas 37
5.3.1 Perceptrón Multicapa 38 5.4 Clasificación de Fallas usando Redes Neuronales 40
5.4.1 Perceptrón Multicapa 41
Capítulo 6. Sistema Experimental 42
6.1 Modelación matemática de la tubería 42
6.3 Tubería Piloto 44 6.4 Simulador en MATLAB SimuLink 45
Capítulo 7. Esquema de Detección y Diagnóstico de Fugas 48
7.1 Algoritmo de Detección y Localización de Fugas 48 7.1.1 Arquitectura de las Redes Neuronales Artificiales Implementadas 49
7.1.2 Algoritmo de Entrenamiento 50 7.1.3 Localizador de Fugas 54 7.2 Algoritmo de detección de la Magnitud de la Fuga 57
Capítulo 8. Metodología y Diseńo de Experimentos 58
8.1 Metodología 58 8.1.1 Generación de Datos 58
8.1.2 Entrenamiento de la Red 60 8.1.3 Evaluación de la Red Neuronal 60
8.1.4 Prueba y Validación 62 8.2 Diseńo e Implementación de Experimentos 62
8.2.1 Detección de Fugas 62
Capítulo 9. Discusión de Resultados 68
9.1.2 Red con Datos con Retrasos 82
Capítulo 10. Conclusiones y Trabajos Futuros 95
10.1 Conclusiones 95 10.2 Trabajos Futuros 97
Apéndice 1. Glosario de Terminología de D D F 98
Apéndice 2. Localizador de Fugas 101
Apéndice 3. Experimentación y Resultados de Estimación de la Magnitud del
Coeficiente de Descarga de la fuga (X) 105
Apéndice 4. Detección de Fallas usando R N A ' s 109
A 4.1 Otros Modelos Neuronales para el Modelado de Sistemas 109
A 4.1.1 Redes Neuronales Recurrentes 109 A 4.1.2 Redes Neuronales del tipo GMDH 111 A4.2 Otros Modelos de Clasificación de Fallas usando RNA's 114
A4.2.1 Redes de Kohonen 115 A4.2.2 Redes Neuronales de Base Radial 118
A4.2.3 Estructuras de Redes Múltiples 119
Apéndice 5. Algoritmo de Retropropagación 121
Bibliografía 127
Índice de Figuras
Figura 2 - 1 Presión y Flujo del gas después de la fuga 7 Figura 2-2 Método de localización de la fuga usando detección de la onda de presión 7
Figura 2-3 Caída de presión en una tubería antes y después de una fuga 9 Figura 2-4 Caída de presión a lo largo de una tubería con gas antes y después de la fuga . 1 0
Figura 3-1 Clasificación de los métodos de detección y diagnóstico de fallas 18
Figura 4-1 Modelo no-lineal de una neurona 23 Figura 4-2 Transformación producida por la presencia de sesgo 24
Figura 4-3 Función escalón 24 Figura 4-4 Función lineal por rangos 2 5
Figura 4-5 Función logarítmica 2 5 Figura 4-6 Red antealimentada o acíclica con una sola capa 26
Figura 4-7 Red antealimentada o acíclica con una capa oculta y una salida 27
Figura 4-8 Red recurrente 28 Figura 4-9 Diagrama de bloques del proceso de aprendizaje supervisado 30
Figura 4-10 Diagrama de bloques del aprendizaje de refuerzo 30 Figura 4-11 Diagrama de bloques del aprendizaje no-supervisado 31 Figura 4-12 Diagrama de flujo de las seńales del perceptrón 32 Figura 4-13 Arquitectura de un perceptrón multicapa con dos capas ocultas 33
Figura 5-1 Esquema general de un sistema de diagnóstico basado en un modelo 36 Figura 5-2 Esquema de detección de fallas basado en un banco de modelos neuronales ... 37
Figura 5-3 Perceptrón de tres capas con P entradas y N salidas 38 Figura 5-4 Modelado usando una red antealimentada con retrasos 40
Figura 6-1 Modelo discreto de la tubería 44 Figura 6-2 Tubería piloto en la U N A M 45 Figura 6-3 Modelo de la tubería en Simulink 46 Figura 6-4 Bloques interiores del modelo en Simulink 47
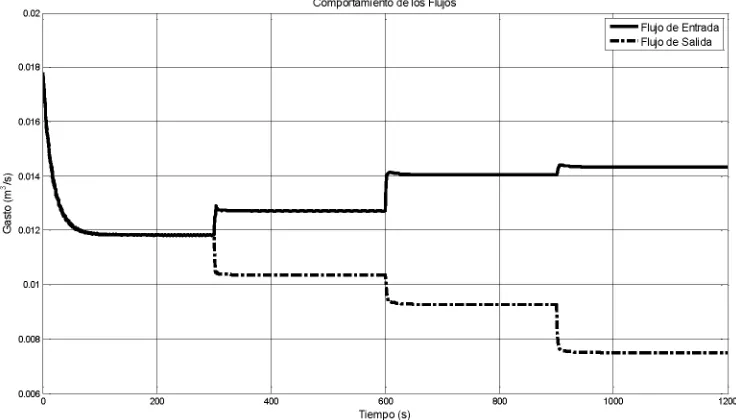
Figura 6-5 Comportamiento de los flujos ante una fuga 47 Figura 7-1 Esquema de detección y diagnóstico implementado 49
Figura 7-2 Salida filtrada de la red 56 Figura 8-1 Diagrama de la metodología seguida en la experimentación 59
Figura 8-2 Ejemplo de una transición de estados 64 Figura 8-3 Comportamiento del flujo ante las fugas 64 Figura 8-4 Representación de los datos de entrenamiento 65 Figura 8-5 Datos de entrenamiento contemplando la variación en l 66
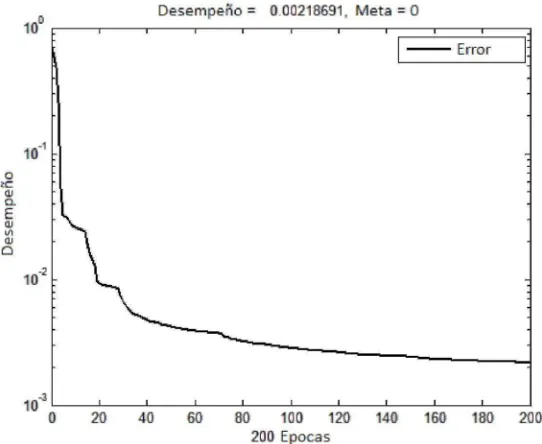
Figura 9-2 Desempeńo de la evolución del error de la red 2-10-10-3 69
Figura 9-3 Salida de la R N A 2-10-10-3 para 70 Figura 9-4 Salida de la R N A 2-10-10-3 para l2 70
Figura 9-5 Salida de la R N A 2-10-10-3 para l3 71 Figura 9-6 Salida del codificador de estados de la R N A 2-10-10-3 71 Figura 9-7 Salida de la R N A 2-10-10-3 para l1 ante ruido del 0 . 0 1 % 72 Figura 9-8 Salida de la R N A 2-10-10-3 para l2 ante ruido del 0 . 0 1 % 73 Figura 9-9 Salida de la R N A 2-10-10-3 para l3 ante ruido del 0 . 0 1 % 73 Figura 9-10 Salida del codificador de estados de la R N A 2-10-10-3 ante ruido del 0.01%.. 74
Figura 9-11 Salida de la R N A 2-10-10-3 para l1 ante cambios en el punto de operación. ... 75
Figura 9-12 Salida de la R N A 2-10-10-3 para l2 ante cambios en el punto de operación. ... 75
Figura 9-13 Salida de la R N A 2-10-10-3 para l3 ante cambios en el punto de operación. ... 76
Figura 9-14 Salida del codificador de estados de la R N A 2-10-10-3 ante cambios en el
punto de operación 76 Figura 9-15 Salida de la R N A 2-10-10-3 para l1 ante diferentes valores de. l 77
Figura 9-16 Salida de la R N A 2-10-10-3 para l2 ante diferentes valores de. l 78
Figura 9-17 Salida de la R N A 2-10-10-3 para l3 ante diferentes valores de. l 78
Figura 9-18 Salida del codificador de estados de la R N A 2-10-10-3 ante cambios en el
coeficiente de descarga 79 Figura 9-19 Salida de la R N A 2-10-10-3 para l1 entrenada para variaciones en el valor
del coeficiente de descarga 80 Figura 9-20 Salida de la R N A 2-10-10-3 para l2 entrenada para variaciones en el valor
del coeficiente de descarga 80 Figura 9-21 Salida de la R N A 2-10-10-3 para l3 entrenada para variaciones en el valor
del coeficiente de descarga 81 Figura 9-22 Transición de estados ideales de la R N A 2-10-10-3 81
Figura 9-23 Transición de estados estimados por la R N A 2-10-10-3 82 Figura 9-24 Representación de las R N A con retrasos implementadas 83 Figura 9-25 Desempeńo del entrenamiento de la red de dos retrasos (RNA 4-4-4-3) 84
Figura 9-26 Desempeńo del entrenamiento de la red de cuatro retrasos (RNA 6-6-6-3) 84
Figura 9-27 Salida de la R N A 6-6-6-3 para l, 85 Figura 9-28 Salida de la R N A 6-6-6-3 para l2 86 Figura 9-29 Salida de la R N A 6-6-6-3 para l3 86 Figura 9-30 Salidas del codificador de estados de la R N A 6-6-6-3 87 Figura 9-31 Salidas del codificador de estados de la R N A 4-4-4-3 88 Figura 9-32 Salidas del codificador de estados de la R N A 6-6-6-3 ante ruido del 0.01%. ... 89
Figura 9-33 Salidas del codificador de estados de la R N A 4-4-4-3 ante ruido del 0.01%. ... 89 Figura 9-34 Salidas del codificador de estados de la R N A 6-6-6-3 ante ruido del 0.015%.. 90 Figura 9-35 Salidas del codificador de estados de la R N A 4-4-4-3 ante ruido del 0.015%.. 90 Figura 9-36 Salidas del codificador de estados de la R N A 6-6-6-3 ante cambios en el
punto de operación 91 Figura 9-37 Salidas del codificador de estados de la R N A 4-4-4-3 ante cambios en el
punto de operación 92
Figura 9-38 Salidas del codificador de estados de la R N A 6-6-6-3 ante cambios en el
coeficiente de descarga 93 Figura 9-39 Salidas del codificador de estados de la R N A 4-4-4-3 ante cambios en el
coeficiente de descarga 93 Figura 9-40 Salidas del codificador de estados de la R N A 6-6-6-3 entrenada ante cambios
en el coeficiente de descarga 94 Figura A2-1 Comportamiento de la presión a lo largo de una tubería con presión cte 102
Figura A3-1 Salidas de la red 11-20-10-3 106 Figura A3-2 Salidas de la red 11-20-20-10-3 106 Figura A3-3 Salidas de la red 11-11-20-20-10-3 107 Figura A3-4 Salidas de la red 45-45-15-3 107 Figura A3-5 Salidas de la red entrenada con AQ's 108
Figura A4-1 Arquitectura de una red recurrente 110 Figura A4-2 Modelo de una neurona G M D H 112 Figura A4-3 Síntesis de una red G M D H 112 Figura A4-4 Procedimiento de selección de neuronas 113
Figura A4-5 Estructura final de una red G M D H 114 Figura A4-6 Mapa auto organizado de dos dimensiones 116
Figura A4-7 Vecindad del ganador 117 Figura A4-8 Arquitectura de una red de base radial con P entradas y 2 salidas 119
Figura A4-9 Esquema de expertos paralelos 119 Figura A4-10 Distribución de función de membrecía 120
Índice de Tablas
Tabla 2.1 Resumen del Estado del Arte 13 Tabla 3.1 Tipos de Fallas y su relación con los componentes 17
Tabla 7.1 Estados de operación de la tubería 55 Tabla 7.2 Esquema de los datos de entrenamiento 57 Tabla 8.1 Esquema de la información presentada por el simulador 59
Tabla 8.2 Estados de operación de la tubería 63 Tabla 8.3 Posibles transiciones de estados 63 Tabla 9.1 Esquema de de los datos de entrenamiento para la red 4-4-4-3 83
Tabla 9.2 Esquema de los datos de entrenamiento para la red 6-6-6-3 83
Tabla 10.1 Resumen de resultados 96
Abreviaciones y Símbolos
Abreviaciones
FDD Detección y Diagnóstico de Fallas (Fault Detection and Diagnosis) FDI Detección y Aislamiento de Fallas (Fault Detection and Isolation)
GMDH Manipulación de Información y Metodos Grupales (Group Method and Data Handling) IA Inteligencia Artificial
L-M Levenberg-Marquardt
LRGF Locally Recurrent Globally feed Forward Networks
LVQ Vectores de Aprendizaje Cuantificables (Learning Vector Quantization) MLP Perceptrón multicapa (Multi-Layer Perceptron)
RBF Función de base radial (Radial Basis Function)
RMLP Perceptrón multicapa recurrente (Recurrent Multi Layer Perceptron RNA Redes Neuronales Artificiales
SOM Mapa Auto-organizado (Self Organizing Map)
VLSI Integración a gran escala (Very Large Scale Integration)
Símbolos
A Tiempo de transición del frente de la onda de presión al inicio s
As Área seccional de la tubería m
a Coeficientes polinomiales adim.
B Tiempo de transición del frente de la onda de presión al final s b Velocidad del sonido en el fluido m/s
Desviación o sesgo en la neurona k adim. c1 Clase o categoría 1
Clase o categoría 2 Ci Vector de centros
D Diámetro de la tubería m
dj Respuesta deseada
e
j Seńal de error
eR Criterio de regularidad índice de calidad
f Coeficiente de fricción de Darcy Weissbach adim. i-esima falla
g Aceleración de la gravedad m2/s
Gradiente del flujo después de la fuga
Gradiente a los largo de la tubería Matriz Hessiana
Carga de presión final Carga de presión inicial Matriz Jacobiana k-esima neurona
Longitud total de la tubería Valor promedio
Pendiente de una función
Número de condiciones de operación del proceso Presión
Flujo volumétrico Flujo de entrada Flujo de salida n-esimo residuo Tiempo
Temperatura
Periodo de la seńal de muestreo para detección de la onda de presión Salida del combinador lineal
Entrada al sistema Volumen geométrico Campo local de activación Gas acumulado en la tubería Matriz de pesos sinápticos Vector de pesos ganadores
Peso sináptico de de la neurona k con la entrada de la sinapsis j Entrada de la sinapsis j
Entradas a la neurona k
m-esima entrada a un perceptrón Salida del sistema
Salida estimada del sistema Distancia del segmento Operador de retraso unitario Posición virtual de una fuga Localización de sensores Valor donde ocurre una fuga Constante de momentum
Número de muestras de entrenamiento Valor limite del umbral de valores permitidos Gradiente local del error
Desviaciones instantáneas del valor promedio
m m
m
Pa m3/s
m3/s
m3/s
3
Volumen de entrada del gas m
Volumen de salida del gas m
Tasa de entrenamiento
Coeficiente de descarga de la 1-esima fuga Factor de fricción
Varianza
Flujo no balanceado m ^s
Función de activación
Número de pesos y sesgos en la red
Capítulo 1
Introducción
Durante los últimos treinta ańos la comunidad científica ha realizado una exhaustiva investigación en el campo de detección de fugas en tuberías. Esto, porque las fugas traen consigo cuantiosas pérdidas debido a: suspensión del transporte del producto, el costo de reparación y pérdida del producto. En caso de que el producto transportado sea flamable, explosivo o peligroso, una fuga por mínima que sea, trae grandes riesgos al ambiente, a las personas cerca de la fuga e incluso al mismo sistema de transporte. Eventos o catástrofes de este estilo inducen un alto costo social, político y financiero, los cuales son proporcionales al tamańo y duración de la fuga.
La mayoría de los estudios existentes a la fecha, se enfocan en la detección de fugas en segmentos de la tubería bajo un régimen de estado estable y haciendo uso de métodos analíticos. Sin embargo, a la fecha no existe un método que pueda trabajar en cualquier punto de operación, en cualquier tubería con cualquier tipo de transitorios. Esto es debido a que cada tubería es diferente a las demás y a que las condiciones en las que operan y se encuentran, difieren una de otra.
Hay ocasiones en que los ductos están bajo tierra o en el mar, lo que dificulta su inspección, además de que no necesariamente operan en estado estacionario, por lo que los métodos antes mencionados no siempre brindan resultados satisfactorios.
En la presente tesis, se presenta una propuesta de un método de detección de fugas en tuberías haciendo uso de técnicas utilizadas en inteligencia artificial. La ventaja de este enfoque es que a diferencia de los métodos analíticos, no se necesita conocer el modelo matemático que describa la dinámica de transporte del fluido en la tubería. Lo que hace que sea aplicable a cualquier tipo de fluido o tubería ya que sólo requiere de dos mediciones de flujos.
El método propuesto hace uso de redes neuronales para detectar la presencia y la ubicación de una o más fugas a lo largo de la tubería. La importancia de esta tesis radica en la necesidad de tener un algoritmo que sea capaz de trabajar en condiciones donde el modelo es incierto y existe un número reducido de variables a monitorear para detectar y aislar la fuga.
La estructura de la presenta investigación lleva al lector a través de los conceptos básicos de la teoría de detección y diagnóstico de fugas, para posteriormente analizar lo existente en el campo de detección de fugas haciendo uso de la teoría de control.
Posterior a esto, se presenta un marco teórico sobre redes neuronales artificiales, sus conceptos básicos así como su aplicación en el área de detección de fallas. En los capítulos 4 y 5 el lector podrá conocer y entender el estado del arte de la detección de fallas usando redes
Capítulo 1. Introducción
neuronales artificiales; lo que servirá para la mejor comprensión de las contribuciones que esta tesis propone.
En el capítulo 6 se presenta el sistema experimental del cual se obtuvieron las mediciones. Se explica cómo y en base a que se creó el simulador que permitió la generación de los datos que serían las entradas al algoritmo de detección y diagnóstico.
El esquema que se implementó para la detección y ubicación de la fuga se presenta en el capítulo 7. En esta sección se explica cada etapa y elemento del sistema de detección. Se profundiza en las arquitecturas de las redes implementadas así como en su algoritmo de aprendizaje.
En el capítulo 8 se expone la metodología y el diseńo de experimentos que se llevaron a cabo para probar y validar el desempeńo de las redes implementadas. En esta sección se explica como fue entrenada cada red, que tipo de datos de entrada se usaron y en que consistieron las pruebas de validación.
Finalmente, en los capítulos 9 y 10 se presentan los resultados obtenidos así como un análisis y conclusiones de estos.
1.1 Planteamiento del Problema
Dentro del área de detección de fugas en tuberías existen muchos métodos analíticos para plantear una solución satisfactoria, tales como bancos de observadores, identificación paramétrica del transitorio, etc. Sin embargo, todos estos métodos basados en la teoría de control tradicional requieren de un modelo preciso de la dinámica de la tubería. Lo que hace que cada solución sea particular para cada sistema y que además el sistema tenga que estar bajo constante monitoreo ya que conforme trascurre el tiempo, las condiciones físicas de la tubería varían, lo que traerá consigo alteraciones al modelo real de la dinámica y por consiguiente al algoritmo de detección basado en él.
Además de lo antes mencionado, la mayoría de estos esquemas requieren de mediciones muy precisas y libres de ruido, lo que trae consigo el uso de de múltiples sensores y filtros de diferente tipo, lo cual en la práctica se dificulta.
A la fecha no existe un método que pueda trabajar en cualquier punto de operación, en cualquier tubería o con cualquier tipo de transitorios.
1.2 Objetivos
El objetivo general es presentar un método que apoye al proceso de detección de fugas en tuberías haciendo uso de técnicas derivadas de la teoría de inteligencia artificial como alternativa a las técnicas convencionales que existen hoy en día.
Dentro de los objetivos particulares de la presente tesis, está el de diseńar un sistema basado en Redes Neuronales Artificiales ( R N A ' s ) que sea capaz de: detectar la ocurrencia de una o varias fugas en una tubería, ubicar dicha fuga o fugas a lo largo de la tubería y finalmente indicar la magnitud de la fuga o fugas
1.3 Justificación
Capítulo 1. Introducción
reparación, la pérdida del producto y más que nada el impacto ecológico que estos incidentes pueden provocar.
Eventos o catástrofes de este estilo inducen un alto costo social y financiero, los cuales son proporcionales al tamańo y duración de la fuga. Aunado a esto, muchas de las tuberías se encuentran en lugares de difícil acceso (subterráneas, submarinas, etc.) lo cual dificulta o imposibilita su constante monitoreo.
Es por esto, que contar con métodos capaces de lidiar con variaciones o condiciones inesperadas en la dinámica de la tubería es cada vez más necesario.
En caso de la aparición de una fuga, su efecto sólo puede ser minimizado con una detección y localización oportuna del punto de fuga para así poder tomar una acción de control lo más rápido posible
En este trabajo, se presenta una propuesta de un algoritmo que a diferencia de los existentes, no necesita del modelo de la dinámica de la tubería. Tan sólo necesita de mediciones de flujo, ahorrando así mediciones de otras variables. Sin embargo es necesario aclarar que el algoritmo requiere de datos de entrenamiento provenientes de diferentes situaciones de fugas.
1.4 Contribuciones
El emplear técnicas que no han sido tan exploradas abre puerta a una gran gama de contribuciones, sin embargo entre las principales se tienen:
• Diseńo de un sistema de detección y diagnóstico de fallas en tuberías usando métodos de "caja negra" o basados en el historial de datos.
• Explotar la habilidad de reconocimiento de patrones de las R N A ' s (Redes Neuronales Artificiales) para la detección de fallas.
• Detección de múltiples fugas (secuenciales o simultáneas)
• Reducción de las mediciones necesarias para detectar y diagnosticar la fuga.
1.5 Alcances y Limitaciones
Como se mencionó anteriormente, el alcance de la presente investigación es desarrollar un algoritmo que sea capaz de detectar la aparición de una o hasta tres fugas, así como su localización a lo largo de una tubería.
La principal limitante fue el hecho de no contar una base datos reales de las mediciones de los flujos. Por lo que se utilizó datos generados mediante un simulador validado en un laboratorio hidráulico.
Capítulo 2
Detección de Fugas en Tuberías
2.1 Métodos y sistemas de detección de fugas en tuberías
La supervisión automática de las redes de tuberías es un reto para la comunidad ingenieril, ya que las pérdidas económicas y ecológicas producidas por el deterioro de estas tuberías tienen un impacto global. A pesar de que las tuberías están protegidas contra el dańo provocado por el medio ambiente, los eventos externos, variaciones climatológicas, corrosión envejecimiento, etc., ocurren y pueden provocar dańos en la instalación, además de las variaciones internas de presión que pueden general pequeńas fugas. En general, el objetivo de un sistema automático de supervisión de redes de distribución consiste en detectar tan rápido como sea posible la localización exacta y la magnitud de las fugas u obstrucciones con un mínimo de instrumentación y costo.
Es por esto que en las últimas dos décadas, se han considerado diversas técnicas, puntos de vista, herramientas y diferentes áreas del conocimiento, para lograr crear sistemas de monitoreo y de detección de fugas en sistemas tales como acueductos, líneas petroleras, sistemas de distribución de agua, plantas químicas, etc.
Como Liou [22] ha hecho notar, la detección de fugas de magnitud considerable es más simple que la de pequeńas, pues estas últimas son producto del envejecimiento, erosión y la lenta corrosión de los elementos de la red.
Como menciona W a n g en su trabajo del 2005 [ 4 1 ] , no existe un método que siempre pueda cumplir todos los requerimientos y cada técnica tiene sus ventajas y desventajas en diferentes circunstancias.
La construcción de las tuberías de transporte de fluidos es siempre muy costosa, por lo tanto todas las etapas de su construcción y operación deben de cumplir con las regulaciones y recomendaciones de múltiples estándares y regulaciones globales [ 2 4 ] , las cuales tienen como objetivo el proporcionarle a la tubería una larga vida útil.
Los dańos que las tuberías sufren pueden ser causados por la corrosión o la erosión de las paredes internas y externas, agrietamiento de las uniones, astillamiento de las paredes o bien defectos en el material. Una forma de contrarrestar estos efectos es la instalación de sistemas de protección catódicos, bajo monitoreo telemétrico. [34]
Capítulo 2. Detección de Fugas en Tuberías
Durante la operación normal de la tubería, se pueden realizar inspecciones con los conocidos pistones inteligentes, lo cual permite detectar fugas o dańos en la tubería en su etapa inicial.
A pesar de que la aparición de fugas es un hecho inevitable debido a que estas son causadas por la subestimación de los efectos antes mencionados, en muchas ocasiones las fugas son causadas por operaciones humanas: accidentales - excavaciones, reparaciones o construcción cerca a las tuberías- o a propósito - tomas clandestinas, ataques terroristas o mal intencionadas.
En caso de la aparición de una fuga, su efecto sólo puede ser minimizado con una detección y localización oportuna del punto de fuga y tomar una acción de control lo más rápido posible (detener el bombeo, cerrar válvulas, etc.,)
Es de suma importancia hacer notar que las tuberías pueden clasificarse en dos grandes grupos según el estado de agregación de la materia que transportan: tuberías para gases o bien tuberías para líquidos. La configuración de una tubería para líquidos es generalmente más simple, ya que usualmente consta de una sola línea que comienza con el proveedor y termina con el receptor, rara vez se presentan ramas o sub-líneas. En cambio la configuración para las tuberías que transportan gas es más compleja. [35]
Existen diversas consideraciones que se tienen que tener en cuenta con respecto a las tuberías y el material que transportan algunas de ellas son:
• La inercia de un fluido no tiene gran influencia en las tuberías para gas debido su baja densidad (a menos que existan cambios repentinos y grandes en la demanda o altas presiones y diámetros de la tubería), mientras que en las tuberías con líquidos la inercia jamás puede ser omitida.
• La compresibilidad tiene una gran influencia en las tuberías para gases, y es menos importante para las tuberías transportando líquidos. La compresibilidad de los líquidos aunados con su deformación elástica conducen a tener transitorios sostenidos ante cambios en las condiciones de operación.
• La tasa de flujo en las tuberías para líquidos generalmente es constante, cercana al punto nominal de operación. En cambio, en las tuberías para gases, esta tasa está en función de la demanda del consumidor.
2.2 Tareas y Clasificación General de los Métodos de Detección y
Localización de Fugas.
Los sistemas de detección de fugas deben de ser capaces de realizar al menos tres de las siguientes funciones o tareas [34]:
1. Detección de la presencia de una fuga 2. Generación de una alarma.
3. Ubicación de la fuga.
4. Estimación de la tasa de la fuga o su tamańo.
Un factor de suma importancia, que decide la factibilidad o uso del algoritmo de detección es su sensibilidad a dańos reales así como a la robustez ante falsas alarmas.
Los métodos de detección de fugas pueden ser clasificados en dos categorías principales [1], [20]:
Capítulo 2. Detección de Fugas en Tuberías
1. Métodos Directos (Externos). En ellos la detección es llevaba a cabo desde afuera de la tubería mediante sensores o observación visual
2. Métodos Indirectos (Analíticos, Internos). La detección está basada en la medición y análisis de parámetros del flujo transportado. Estos métodos son generalmente subdivididos en tres categorías:
• M é t o d o s basados en la detección de la onda acústica producida por la fuga • M é t o d o s basados en el concepto de balance de masa.
• M é t o d o s analíticos, basados en un m o d e l o matemático y mediciones de alguna variable mediante un sensor. Consisten en el m o d e l o en t i e m p o real y u n a comparación continua con el m o d e l o generado contra las mediciones de sensores.
2.2.1 Métodos Directos
L o s m é t o d o s directos convencionales son llamados "rondas de red" y son u n a combinación de u n a observación visual realizada por un operario y algún detector portátil de producto transportado por la tubería. Se p u e d e mejorar este m é t o d o con la ayuda de perros entrenados para rastrear fugas m í n i m a s del líquido o gas transportado.
L o s métodos acústicos [ 1 2 ] están basados en la detección del ruido p r o d u c i d o por la fuga. Requieren de la instalación de sensores acústicos (micrófonos especializados con un amplio ancho de b a n d a de transmisión) a lo largo de la tubería. El ruido es analizado para identificar que lo causa, u n a fuga o cualquier otro fenómeno. D u r a n t e la activación del sistema se analiza el ruido del ambiente, lo cual facilita la identificación de un ruido producido por alguna fuga. L o s m é t o d o s acústicos permiten la detección de fugas de 4 d m3
/ h para líquidos y 4 0 d m3
/ h para gases. L o s sensores deben tener u n a distancia n o m a y o r a 100 metros entre cada u n o a lo largo de la tubería.
L o s sensores tipo cable, están compuestos por dos circuitos. U n o de ellos es un circuito de monitoreo de la continuidad del cable, el segundo es el circuito de alarma. Este último es un circuito n o r m a l m e n t e abierto, cerrándose sólo en caso de fuga. Estos sensores se recomiendan para tuberías de corta longitud.
Las ondas ópticas guiadas colocadas a lo largo de la tubería son de hecho u n a especie de detector que reacciona a los cambios de temperatura locales. C o m o resultado de u n a expansión adiabática, aparece u n a caída en la temperatura en los puntos de fuga. Esta técnica permite conocer el perfil de temperatura a lo largo de u n a tubería.
2.2.2Métodos Indirectos
2.2.2.1 Métodos basados en la detección de ondas de presión.
L a figura 21 presenta el comportamiento de la presión y del flujo a lo largo de la tubería que transporta gas al aparecer u n a fuga.
Capítulo 2. Detección de Fugas en Tuberías
estos aparecen en el t i e m p o resultante de la velocidad acústica y la distancia entre los punto de medición.
Se deben de instalar, en intervalos de varios kilómetros, transductores de presión con suficiente velocidad de operación. Para asegurar la sincronía precisa del t i e m p o de medición generalmente se u s a sistemas de posicionamiento global (GPS). Este sistema genera información del tiempo basado en relojes atómicos instalados en los satélites. Este m é t o d o es relativamente rápido (la detección y localización de la fuga se hace en segundos).
Figura 22: Método de localización de la fuga basado en la detección de la onda de presión
E n la figura 22 el eje de las abscisas representa la distancia Z, desde el inicio de la tubería (0) hasta su final Z. Sensores de presión son instalados en los punto Zi. El eje de las ordenadas representa el t i e m p o de propagación de la onda acústica o de presión en función a la distancia del punto de fuga Z1.
El punto de fuga es calculado c o m o la intersección del punto L de las líneas AL y LB. El punto A denota el t i e m p o de transición del frente de la onda de presión al inicio y el punto
B el t i e m p o de transición de la onda al final de la tubería. L a precisión de la localización de la
Figura 21: Presión y Flujo del gas después de la fuga.
Capítulo 2. Detección de Fugas en Tuberías
fuga está dada p o r bT0, donde T0 es el periodo de la seńal de muestreo. P o r lo que, el periodo
de muestreo debe ser lo m á s corto posible.
L a eliminación del ruido estocástico es posible gracias al u s o de diferentes tipos de filtros digitales y en especial a los m é t o d o s de correlación [31]. Si la fuga n o es detectada de inmediato (debido a fallas temporales del sistema, la falla n o será descubierta j a m á s . Este m é t o d o permite detectar y localizar la fuga, pero si se requiere conocer la intensidad de la fuga, es necesario someter a las amplitudes de las ondas a u n análisis diferente.
2.2.2.2 Método basado en el concepto de balance de masa
Este m é t o d o tiene su base en el principio de la conservación de la masa. L a cantidad total (masa, flujo, volumen) de u n fluido entrando y saliendo de u n a red debe ser balanceado por la acumulación dentro de la red. E s t o es aparentemente el m é t o d o m á s natural y simple. Sin embargo, cambios en la cantidad del líquido, que depende la presión y temperatura, deben ser cuidadosamente considerados. Estos cambios son cruciales para el transporte de gases mediante tuberías. D e igual forma influyen m u c h o los transductores y sensores usados en las mediciones.
Para aplicar este m é t o d o es necesario calcular u n valor corriente de cierta variable T(t) en intervalos de m u e s t r o regulares. Para u n a red de gas con u n a sola entrada y n salidas, la variable para condiciones nominales puede ser escrita c o m o :
T(t)
=
Vn,in(t) Σni=i V
n,
0 U t(t) V
n,
a(t)
(2.1)Esta variable r(t) p u e d e ser definida c o m o el flujo n o balanceado corregido en el tiempo t. Esta es la diferencia del v o l u m e n de gas entrando la tubería ( Vnín(t) y el gas
saliendo (Σn
=1 Vn j 0 M t( t ) . ) D o n d e n es el n ú m e r o de salidas en la tubería. El término Vna(t)
representa el gas a c u m u l a d o en tubería, donde el subíndice n denota condiciones nominales. Este último término representa el cambio del contenido del gas en la tubería y depende de la presión temperatura y composición del gas. P o r lo que puede ser reescrito de la siguiente forma:
Vn,a
( t )=VgP nP^Z
( 2 . 2 )Y debe ser calculado paso a paso desde el valor p r o m e d i o de temperatura y presión para cada sección de la tubería. Vg es el v o l u m e n geométrico de la tubería, p y T son la presión
y temperatura absoluta de la tubería.
El parámetro r(t) u s u a l m e n t e fluctúa alrededor de u n a m e d i a diferente a cero. Estas fluctuaciones pueden ser caracterizadas por u n a varianza D e n o t e m o s Am las desviaciones instantáneas del valor promedio. Para generar u n a alarma de fuga se examina la siguiente suma acumulativa:
Y(t)
=
Y(t1 ) +
^ [ T ( 0
m (2.3)Capítulo 2. Detección de Fugas en Tuberías
Para eliminar las falsas alarmas causadas por el lento cambio de los transductores de medición, se puede modificar el valor de m lentamente, con el u s o de mediciones previas sin fugas.
P o r su simplicidad, este m é t o d o es m u y u s a d o en tuberías complejas, sin embargo, la localización exacta de la fuga n o es posible, se puede ubicar la sección pero n o el punto especifico.
2.1.2.3 Método del Gradiente
M u c h o s m é t o d o s contemporáneos, son derivados del m é t o d o del gradiente [10, 11, 6]. L a figura 23 muestra la caída de presión a lo largo de u n a tubería de líquido antes y después de la aparición de la fuga.
Figura 23. Caída de presión en una tubería antes y después de una fuga
El líquido es transportado del tanque T al t a n q u e T2. E n condiciones normales de
operación el gradiente a lo largo de la tubería es constante, igual a Gs. C u a n d o u n a fuga aparece, después de regresar a un estado estable, se puede observar lo siguiente:
• L a presión se cae tanto al inicio c o m o al final de la tubería.
• Se incrementa el valor del gradiente de presión hacia el lado izquierdo del lugar de la fuga.
• D e c r e m e n t o del valor del gradiente hacia el lado derecho de la fuga.
• Incremento del flujo o gasto hacia el lado izquierdo, mientras que al lado derecho se observa u n a disminución.
Usualmente, a lo largo de la tubería se instalan válvulas donde los transductores de presión son colocados. Estos permiten que se pueda calcular el gradiente. L a coordenada del punto de fuga zi es entonces:
Z1 =
L\1 +H
(2.4)1
Y AtanGk\
v '
Capítulo 2. Detección de Fugas en Tuberías
El gasto de la fuga p u e d e ser calculado de la siguiente fórmula:
(2.5)
El caso cambia si se trata de gases:
Figura 24.Caída de presión a lo largo de una tubería con gas antes y después de la fuga
L a investigación realizada por [8] ha demostrado que al inicio de la tubería la caída de presión puede ser despreciada. Y c o m o a la salida hay u n a estación de regulación de gas, el flujo del gas sólo depende de la demanda. P o r lo que cambios en el gradiente n o son m u y notorios. P o r lo que la coordenada de la posición de la fuga p u e d e ser aproximada mediante:
xu=
p(L,t) cos Gs sin(90Gs
tr
Gp) (2.6)
L o s m é t o d o s de gradiente son sólo efectivos en estados de operación estables, es decir, son perturbaciones originadas por el cambio de las condiciones de operación.
2.2.2.4 Métodos Analíticos
L a base de estos m é t o d o s esta en el m o d e l a d o del fenómeno en t i e m p o real mediante un m o d e l o matemático ( m o d e l a n d o la velocidad del flujo c o m o función de la presión o bien la presión c o m o función de la velocidad) y la comparación de los valores calculados por el m o d e l o contra los obtenidos con las mediciones de los sensores de la tubería. C u a n d o estos residuos son grandes, se activa u n a alarma indicando que u n a fuga fue detectada.
El m o d e l o m a t e m á t i c o debe de reconstruir de la forma m á s precisa posible las características dinámicas y estáticas de la tubería y de los elementos que interactúan con ella.
D e s d e un punto de vista práctico, los principales problemas para aislar y localizar automáticamente las fugas en este tipo de redes son los siguientes: el costo de los sensores de gran precisión, el ruido introducido por las mediciones, la incertidumbre en el m o d e l o que describe el comportamiento del fluido en condiciones reales y la dependencia entre la magnitud de la fuga y la condición de operación del sistema.
Capítulo 2. Detección de Fugas en Tuberías
Estas herramientas se basan en la identificación de parámetros del m o d e l o afectados por las fallas [15], la redundancia analítica de la evolución de las salidas de un sistema para estimar su comportamiento interno ([10]; [11]) y la información heurística obtenida por los operadores de un proceso en condiciones normales y anormales [32]. E s decir, mediante la generación o conocimiento de la respuesta deseada del proceso, se puede comparar esta salida con la real o medida, de forma que se puede visualizar la ocurrencia de un evento que p r o v o c ó u n a discrepancia en el proceso. Estos eventos pueden ser fallas o perturbaciones en el sistema.
C a b e hacer notar que estas tres vertientes explotan directa o indirectamente el conocimiento del comportamiento interno de un sistema y son, en la mayoría de las aplicaciones, m u y rentables, al sustituir la multiplicidad de instrumentación por software [11]. Se puede concluir que estos autómatas proporcionan un mejor d e s e m p e ń o que los esquemas usados en el pasado apoyados en el hardware.
E n el área de control se han abordado los problemas asociados con la detección y aislamiento de fugas y obstrucciones en ductos sin t o m a s laterales u s a n d o diferentes métodos. E n particular Billmann [2] propone identificar en línea la fricción del ducto j u n t o con el cálculo de la correlación cruzada de las desviaciones de los flujos m e d i d o s en los extremos del ducto con respecto a los estimados, considerando el tubo en condiciones de operación normales para localizar la posición de la fuga. L i o u [22] sugiere la identificación en línea de la respuesta dinámica para detectar el cambio en la respuesta y a partir de ahí aislar la falla. P o r otro lado, Ashton [1] emplea un m o d e l o n o lineal y coloca sensores intermedios en el ducto para aislar las obstrucciones; obviamente el incrementar los sensores n o p u e d e llevarse a cabo en la práctica, por lo que este m é t o d o es p o c o factible. Verde, [37] reporta resultados satisfactorios para localizar múltiples fugas u s a n d o un b a n c o de observadores lineales (por ejemplo, en u n a representación de estado, los observadores permiten estimar el vector de estado a partir de ciertas mediciones del sistema) y t o m a n d o mediciones de solamente de las presiones y gastos en los extremos del ducto. P o r su parte, u s a n d o conceptos de teoría estadística, Dinis [8] presentó un m é t o d o de detección únicamente para u n a fuga, empleando los valores m e d i o s de la fricción de la tubería en condiciones normales y de fuga, de m a n e r a similar a la idea original de Isermann propuesta en 1984 [15].
L a comunidad científica de control automático h a desarrollado u n a teoría general de diagnóstico y detección de fallas en sistemas dinámicos. Esta teoría permite la generación de síntomas de las fallas (residuos). A partir de esta teoría m u c h o s procesos basados en m o d e l o s matemáticos han sido desarrollados para la detección de fugas. B i l l m a n e Isermann [2], Shields[30] y Korbicz[17] diseńaron generadores residuales u s a n d o un m o d e l o de dimensión finita y asumieron u n a discretización en un espacio fijo para un conjunto de ecuaciones diferenciales parciales las cuales describen el comportamiento del fluido. E n [38] se presenta un m é t o d o para la localización de múltiples fugas asumiendo fugas secuenciales y escaneando la tubería con u n a ley adaptable para estimar la posición de la fuga. Este p r o c e d i m i e n t o es exitoso si u n a nueva fuga aparece después de que la fuga previa ha sido localizada. Sin embargo, si la nueva fuga aparece antes de la fuga previa el algoritmo falla. [39]
E s importante m e n c i o n a r que los m é t o d o s de localización basados en condiciones de estado estacionario para generar el residuo sin seńales de prueba (ejemplos [2], [30], [8]) tienen u n a propiedad en común; Si se aplican para el caso de múltiples fugas con condiciones similares, todos estos m é t o d o s fallan. E s t o se debe a:
• La imposibilidad de aislar dos o más fugas con algún algoritmo de generación de residuos en estado estable debido a que no existe una única solución para la ecuación
Capítulo 2. Detección de Fugas en Tuberías
de balance de m a s a ya que la velocidad de la onda n o influye en la condición de estado estable.
• La parametrización de una fuga virtual en la posición Zeq, la cual genera el mismo flujo
de estado estable al final de la tubería, como en el caso de un conjunto de fugas múltiples.
A pesar de que el hecho de la existencia de más de una fuga en intervalos pequeńos de tiempo es raro, puede pasar por catástrofes naturales, como terremotos o bien acciones humanas como tomas clandestinas de líneas petroleras o el incremento de la presión en los acueductos por malas conjunciones. [21] propuso capturar los patrones con fugas del diagrama de respuesta a la frecuencia considerando perturbaciones de las válvulas en las líneas. Ferrante y Brunone [9] presentaron un método basado en la respuesta transitoria usando la transformada de Fourier a las seńales de presión. Sin embargo, todos estos métodos tienen limitantes prácticas si se presentan efectos dominantes de no-linealidades o bien si se requiere una seńal de prueba. Brunone reportó un método basado en el estado no estable del sistema, con la capacidad de detectar dos fugas, una después de la otra.
Como se mencionó previamente, existen diversos enfoques en la teoría de detección de fallas. Dentro del enfoque de métodos basados en el historial del sistema, los algoritmos de inteligencia artificial han ido cobrando mucha fuerza debido a su relativamente simple implementación y diseńo. En [16] demostraron que es posible la detección de fallas y su clasificación haciendo uso de sistemas híbridos en especial los neuro-difusos. En su trabajo muestran la implementación de un sistema difuso para analizar la información brindada por múltiples sensores de presión distribuidos en toda la red de distribución y después de esto pasan la información por una red neuronal para la tarea de clasificación de las fugas. En este caso el uso de múltiples sensores encarece el proyecto, además de tan sólo poder detectar la sección en la que ocurre la fuga.
Recientemente, D a Silva [7] publicó un método basado en un clasificador difuso de la respuesta transitoria con múltiples fugas. Sin embargo, una limitante de estos métodos basado en el historial, puede llegar a ser la cantidad de datos necesarios para entrenar al algoritmo. Por otro lado el análisis del transitorio del fluido en el dominio del tiempo con respecto a los parámetros para una fuga en Zeq [40] respaldó la hipótesis de que usando el transitorio de la respuesta ante las fallas, es posible identificarlas y clasificarlas. Es decir, la respuesta transitoria es la clave para la detección de la magnitud de la fugas.
2.2 Fuente de errores para varios métodos de detección de fugas
En el caso de los métodos analíticos, la fuente fundamental de errores es la imprecisión de las mediciones de las propiedades de los fluidos. Las propiedades de los líquidos (densidad, resistencia al flujo, etc.) pueden variar de los datos obtenidos de tablas o de cálculos previos. D e igual forma errores en la medición del diámetro de la tubería afectan directamente en la precisión del modelo.
Por otra parte, los modelos rara vez incluyen el efecto de partículas de algún gas o residuos en el líquido. Lo cual afecta la compresibilidad del liquido, así como su viscosidad, su modulo de elasticidad y otras propiedades que afectan directamente al modelo.
Capítulo 2. Detección de Fugas en Tuberías
A d e m á s de estas cuestiones, m u c h o s de los errores o imprecisiones las ocasionan los sensores y los transductores. E s por esto que es necesario el ajuste de los datos de entrada a los modelos. El criterio de corrección es el de minimización del residuo. L o s datos deben ser corregidos frecuentemente (siempre cuando sea conocido que n o existen fugas en el sistema).
Tabla 21. Resumen del estado del arte
Método Fundamento Mediciones Autores
Acústico Detección del ruido generado por la fuga
Sensores acústicos (micrófonos)
R u i d o
Glen N . F .
Identificación en línea Identificación del valor de la fricción del ducto junto con el cálculo de la correlación cruzada de los flujos Flujo, presión, Billman Identificación en línea Identificación de la
respuesta dinámica Flujos, presión Liou B a n c o de
Observadores Observadores de estados Flujos, presión Verde M é t o d o s
Estadísticos Estimación de coeficientes de fricción. Coeficientes de fricción en estado nominal, en estado de fuga, flujo y presión Dinis Identificación paramétrica n o lineal
Identificación recursiva de los parámetros de flujo y presión
Flujo, presión Visairo, V e r d e Captura de Patrones Frecuenciales Identificación de patrones en base a la respuesta frecuencial Flujos, presión Lee, Vitovsky Análisis Frecuencial Análisis de la respuesta transitoria usando transformadas de Fourier Flujos, presión Ferrante y B r u n o n e NeuroDifusos Detección y clasificación usando RNA y sistemas difusos Múltiples sensores de presión Izquierdo, L ó p e z Análisis de la respuesta transitoria Clasificación de la respuesta transitoria usando un clasificador difuso
Flujo D a Silva et al
Capítulo 3
Fundamentos de Detección y Diagnóstico de Fallas
3.1 Introducción
C o n el incremento del grado de dependencia que la sociedad m o d e r n a tiene en los sistemas y procesos tecnológicos complejos, su disponibilidad y correcto funcionamiento se han convertido en u n a cuestión estratégica. Su incorrecto funcionamiento puede provocar pérdidas económicas, peligro para los operadores, inconvenientes para los usuarios, etc. E s por esto que el c a m p o de control y de supervisión de procesos ha sido u n o de los que m á s ha evolucionado en los últimos ańos, según el enfoque predominante en la industria.
A d e m á s , la automatización de estos procesos, si bien ha permitido liberar a los operadores h u m a n o s de su control y operación manual, n o los ha vuelto i n m u n e a las fallas. U n a falla es t o d o c a m b i o en el comportamiento de alguno de los c o m p o n e n t e s del sistema (desviación n o permitida de alguna de sus propiedades o parámetros característicos) de m a n e r a que éste ya n o puede satisfacer la función para la cual ha sido diseńado [3].
L o s sistemas de control automático son susceptibles a las fallas, y estos pueden amplificar el efecto de la falla, p r o v o c a n d o así, su mal funcionamiento. A d e m á s , los lazos de control pueden ocultar las fallas evitando ser observadas hasta alcanzar un grado tal que produzcan u n a avería irreparable que obligue a detener del sistema o proceso. P o r ello existe u n a creciente necesidad e interés en desarrollar sistemas de control que puedan operar de forma aceptable incluso después de la aparición de u n a falla y que sean capaces de parar el proceso antes de que se originen dańos irreparables en el m i s m o . A este tipo de sistemas de control se les d e n o m i n a tolerantes a fallas.
L a tolerancia a fallas se entiende pues c o m o la capacidad de un sistema de control para mantener los objetivos de control a pesar de la aparición de u n a falla, admitiéndose u n a cierta degradación en su d e s e m p e ń o [3].
Capítulo 3. Fundamentos de Detección y Diagnóstico de Fallas
3.2 Metodología de Diseńo de Algoritmos de Detección y
Diagnóstico de Fallas
Existe u n a metodología de diseńo propuesta por B l a n k e [3], la cual está dividida en cinco etapas. L a s etapas de esta metodología se enumeran a continuación:
1. Análisis del Sistema a dos niveles: a nivel de c o m p o n e n t e s mediante u n análisis de propagación de fallas a través de todos los subsistemas m á s relevantes, así c o m o u n a evaluación de la severidad de los m i s m o s y a nivel de estructura de cara a analizar la redundancia presente en el sistema que ayudará en el diseńo del sistema de diagnóstico y reposición.
2. Diseńo del Sistema de Diagnóstico a partir del análisis estructural y teniendo en cuenta las medidas disponibles y las fallas que se desean diagnosticar. E n el caso de que n o se puedan diagnosticar todas las fallas que se deseen, se deberá modificar la instrumentación disponible hasta conseguirlo. El sistema de diagnóstico de fallas deberá n o sólo detectar y aislar las fallas sino t a m b i é n estimar su tamańo.
3. Diseńo de los Mecanismos de Tolerancia para cada u n o de las fallas consideradas según se trate de fallas en sensores, actuadores y/o planta.
4. Diseńo del Supervisor a partir de la información acerca de las fallas proporcionada por el sistema de diagnóstico, el supervisor deberá activar los m e c a n i s m o s de tolerancia que se han diseńado para cada u n o de ellos.
5. Aplicación y pruebas en simulación y sobre el sistema real.
L a primera tarea a realizar en un sistema de control tolerante activo consiste en el diagnóstico de la falla en t i e m p o real, llegando n o sólo a su detección y aislamiento sino también a la estimación de su magnitud. P o r lo tanto, el diagnóstico de falla se puede a su vez dividir en tres etapas según su profundidad:
• Detección de la falla: decisión de si existe o n o u n a falla así c o m o la determinación de su instante de aparición.
• Aislamiento de la falla: localización del c o m p o n e n t e en el cual se ha producido la falla.
• Identificación y estimación de la falla: identificación del m o d o de falla y estimación de su magnitud.
C o m o t o d o proceso, existen diversas características o elementos considerar en el diseńo de algún algoritmo de diagnóstico. A continuación se presentan las características deseables en un sistema de diagnóstico:
Rápida detección y diagnóstico: El sistema debe responder rápidamente en la detección y diagnóstico de fallas. Sin e m b a r g o esto es difícil de lograr debido a que u n a respuesta rápida implica que haya alta sensibilidad a las influencias de altas frecuencia.
Aislabilidad: el sistema debe ser capaz de distinguir entre dos o m á s fallas. E s decir identificar la falla ocurrida de forma precisa.
Robustez: El sistema debe ser robusto ante ruido e incertidumbre. D e forma que n o se vea afectado por estos.
Identificación de nuevas fallas: El sistema de diagnóstico debe ser capaz de decidir, si el proceso está trabajando de forma normal o no. E n caso de que funcione de m a n e r a anormal,
Capítulo 3. Fundamentos de Detección y Diagnóstico de Fallas
debe ser capaz de reconocer si se debe a u n a falla conocida o bien si se trata de un n u e v o tipo de falla.
Estimación del error de clasificación. Esta característica es para generar confianza en el usuario, en base a la estimación de posibles errores que se puedan presentar al realizar la clasificación.
Adaptabilidad: Q u e el algoritmo sea capaz de adaptarse a cambios inesperados tanto de la estructura c o m o del ambiente que rodea al sistema.
Facilidad de explicación del origen de la falla: A d e m á s de la habilidad de identificar la fuente de la falla, un sistema debe ser capaz de proveer explicaciones de c ó m o se originaron y propagaron las fallas hasta las condiciones actuales del proceso.
Identificación de múltiples fallas. E s un requerimiento difícil de lograr, pero es importante que el sistema pueda identificar varias fallas a la vez.
Almacenamiento y requerimientos computacionales. Generalmente las soluciones rápidas en t i e m p o real requieren de algoritmos de baja complejidad computacional, sin embargo requieren de m u c h o espacio de almacenamiento de datos. E n la actualidad se prefiere buscar un balance entre estos requerimientos.
3.3 Clasificación de Fallas
U n a falla es definida c o m o u n a desviación n o permitida de al m e n o s de u n a propiedad característica de u n a variable con respecto a un comportamiento estable o adecuado. P o r lo tanto, u n a falla es un estado que puede llevar al sistema a funcionar incorrectamente o bien generar u n a avería operacional en el sistema. [14]
Las fallas pueden ser clasificadas en diversas categorías según el enfoque que se aplique. T o m a n d o c o m o base el t i e m p o de aparición de las fallas, estas pueden ser clasificadas en:
• Fallas abruptas: son aquellas cuyo efecto aparece repentinamente (por ejemplo, m o d e l a d a mediante un escalón).
• Fallas Incipientes: Son las fallas cuyo efecto aparece de forma progresiva. (Por ejemplo, m o d e l a d a mediante u n a rampa).
• Fallas intermitentes: son aquellas que si efecto aparece repentinamente, p e r o de igual forma desaparecen (por ejemplo, m o d e l a d a mediante un tren de pulsos).
C o n respecto al m o d e l o del proceso, las fallas pueden agruparse en las siguientes categorías:
• Fallas aditivas. Aparecen c o m o desviaciones o sesgos del valor de la variable m e d i d a en los sensores.
Capítulo 3. Fundamentos de Detección y Diagnóstico de Fallas
Tabla 3.1: Tipos de Fallas y su relación con los componentes
Tipo de Falla C o m p o n e n t e s Tipo de Falla
M e c á n i c o s Eléctricos Electrónicos Software F o r m a Sistemáticas V V V F o r m a
Aleatorias V V C o m p o r t a m i e n t o
ante el t i e m p o
Abrupta V V
C o m p o r t a m i e n t o
ante el t i e m p o Incipiente
V V V
C o m p o r t a m i e n t o ante el t i e m p o
Intermitente V V V
C o m p o r t a m i e n t o ante el t i e m p o
R u i d o V V
A l c a n c e Local V V V V A l c a n c e
Global
3.4 Métodos de Detección y Diagnóstico de Fallas
Durante las últimas décadas las investigaciones teóricas y experimentales han demostrado nuevas maneras de detectar y diagnosticar fallas. Se distingue dos tareas primordiales, la detección de la falla, que es tan sólo el reconocer que u n a falla ha ocurrido; y la segunda tarea es la de diagnosticar la falla es decir, encontrar la causa y la ubicación de la falla. M u c h o s m é t o d o s avanzados para la detección de fallas están basados en m o d e l o s matemáticos de procesos y en la teoría de sistemas con el objetivo de generar los síntomas de las fallas. P o r su parte, los m é t o d o s de diagnóstico, son generalmente relaciones causales del tipo fallasíntoma y están basados en estadísticos, inteligencia artificial y "soft computing". E s t o genera dos c a m p o s o áreas de estudio: Detección y Aislamiento de Fallas ( F D I por sus siglas en inglés) y Detección y Diagnóstico de Fallas (FDD).
3.4.1 Clasificación de los Métodos de Detección y Diagnóstico de Fallas
E n un m o d e l o o algoritmo de diagnóstico de fallas existen dos componentes principales: a) el tipo de conocimiento que se posee y b) el tipo de estrategia de b ú s q u e d a del diagnóstico. Esta estrategia es u n a función del e s q u e m a de representación de conocimiento, el cual es altamente influenciado por el tipo de conocimiento apriori que se tenga del sistema. P o r lo tanto, la información apriori es el elemento m á s importante en los sistemas de diagnóstico, y es lo que permite que se hayan desarrollado diversas técnicas, según la información que se tenga en el m o m e n t o de diseńo de algoritmo.
El conocimiento apriori que se necesita para el diagnóstico de fallas es el conjunto de fallas y su relación con los síntomas observados al m o m e n t o de la aparición de estas. U n sistema de diagnóstico debe de tener estas relaciones de forma explícita ( c o m o en u n a tabla de búsqueda) o que puedan ser inferidas de alguna fuente de dominio del conocimiento. Este conocimiento apriori del dominio puede ser desarrollado de un entendimiento fundamental del proceso u s a n d o principios básicos del conocimiento h u m a n o , traducidos a un m o d e l o causal del proceso en cuestión. P o r otro lado, el conocimiento puede ser obtenido de experiencias pasadas; este conocimiento simple y evidente es conocido c o m o conocimiento basado en historial.
El conocimiento b a s a d o en m o d e l o s puede ser clasificado en cualitativo o cuantitativo. Este m o d e l o es desarrollado en base al entendimiento fundamental de las propiedades físicas del proceso. E n los m o d e l o s cuantitativos este entendimiento es expresado en términos de
Capítulo 3. Fundamentos de Detección y Diagnóstico de Fallas
relaciones matemáticas funcionales entre las entradas y salidas del sistema. E n contraste, en los m o d e l o s cualitativos estas relaciones son expresadas en términos de funciones cualitativas centradas alrededor de diferentes unidades en un proceso.
E n diferencia a los enfoques basados en m o d e l o s (cualitativos o cuantitativos) en donde un m o d e l o del sistema es conocido o aproximado, en los enfoques basados en el historial del proceso es de suma importancia contar con un gran n ú m e r o de datos históricos del proceso. Existen diversas formas en la que esta información puede ser transformada y presentada c o m o conocimiento apriori al sistema de diagnóstico. Este proceso es conocido c o m o extracción de rasgos y es realizado para facilitar la tarea de diagnóstico. Este proceso puede ser cualitativo o cuantitativo.
E n la figura 31 [36] se muestra u n a clasificación de diversas técnicas o algoritmos de detección y diagnóstico de fallas.