Monterrey, Nuevo León a
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY
PRESENTE.-Por medio de la presente hago constar que soy autor y titular de la obra denominada
, en los sucesivo LA OBRA, en virtud de lo cual autorizo a el Instituto Tecnológico y de Estudios Superiores de Monterrey (EL INSTITUTO) para que efectúe la divulgación, publicación, comunicación pública, distribución, distribución pública y reproducción, así como la digitalización de la misma, con fines académicos o propios al objeto de EL INSTITUTO, dentro del círculo de la comunidad del Tecnológico de Monterrey.
El Instituto se compromete a respetar en todo momento mi autoría y a otorgarme el crédito correspondiente en todas las actividades mencionadas anteriormente de la obra.
De la misma manera, manifiesto que el contenido académico, literario, la edición y en general cualquier parte de LA OBRA son de mi entera responsabilidad, por lo que deslindo a EL INSTITUTO por cualquier violación a los derechos de autor y/o propiedad intelectual y/o cualquier responsabilidad relacionada con la OBRA que cometa el suscrito frente a terceros.
Diseño de una Máquina de Prueba para Detectar Fallas en
Motores Eléctricos-Edición Única
Title Diseño de una Máquina de Prueba para Detectar Fallas en Motores Eléctricos-Edición Única
Authors Juan de Dios Martínez Crispín
Affiliation ITESM-Campus Monterrey
Issue Date 2007-05-01
Item type Tesis
Rights Open Access
Downloaded 19-Jan-2017 10:03:00
Diseño de una maquina de prueba para detectar fallas en
motores eléctricos.
Por
Ing. Juan de Dios Martínez Crispín
TESIS
Presentada al Programa de Graduados en Ingeniería de la División de
Ingeniería y Arquitectura para obtener el grado académico de
Maestro en Ciencias en Automatización.
Tecnológico de Monterrey
Campus Monterrey.
Tecnológico de Monterrey
División de Graduados en Ingeniería y Arquitectura
Dirección de Programas de Posgrado en Ingeniería y Arquitectura
Los miembros del comité de tesis recomendamos que la presente tesis de
Juan de Dios Martínez Crispín sea aceptada como requisito parcial para obtener el grado académico de Maestro en Ciencias en:
Automatización
Comité de tesis:
Dr. Luis Eduardo Garza Castañón
Asesor de la tesis
|Dr. Francisco Palomera Palacios
Sinodal
M.C. Luis Rosas Cobos
Sinodal
Dr. Francisco Ángel Bello
Director del Programa de Graduados en
Ingeniería y Arquitectura
Reconocimientos:
A Dios por permitirme llegar a ser lo que soy.
A mi esposa por su infinita paciencia y su infinito amor para llevar a buen fin mi carrera de maestría, gracias Lolis.
A mis padres por su infinito amor a lo largo de mi vida.
A mis maestros por que mi maestría ha sido moldeada con sus manos, especialmente al Dr. Luis Eduardo Garza Castañón por todo su apoyo a lo largo de mi Tesis.
Juan de Dios Martínez Crispín
Diseño de una máquina de prueba para detectar
fallas en motores eléctricos.
Juan de Dios Martínez Crispín
Instituto Tecnológico y de Estudios Superiores de Monterrey, 2006
Asesor de la Tesis Dr. Luis Eduardo Garza Castañón
En la Industria de la manufactura de partes automotrices cada vez es mayor la demanda de productos con la mas alta calidad y por lo tanto libres de defectos, tal es el caso de la manufactura de motores eléctricos de imán permanente a los cuales es necesario realizarles una prueba eléctrica de funcionamiento antes de que sean embarcados al cliente para garantizar que estos cumplen con las especificaciones.
Debido a la gran demanda de estos productos en el mercado automotriz los tiempos de manufactura y prueba se han reducido para poder cumplir con las exigencias de alto volumen por parte de los clientes.
En una celda de manufactura de alto volumen es necesario retroalimentar de manera inmediata el resultado de prueba de un motor para que se hagan los ajustes necesarios a los equipos de manufactura y el problema sea corregido.
Para reducir los tiempos de prueba de los motores eléctricos en esta tesis se propone el diseño de un sistema de prueba en el que no se aplica carga al motor mas sin embargo se logra obtener la curva de desempeño del motor que fue probado, los resultados de prueba se pueden obtener en cerca de 2 segundos.
!
" #$ % &
" #$ '
( ) #$ *
+ " #$ ) *
+ " #$ ) *
+ " #$ ) ,
+ " #$ )
-+ "
+ . % #$
! / &
! $ 0 / 1 0 /1 '
! 1 / 2 *
! / 1 0
-! + . !
! + 3 ( ) &
! + 3 / ( ) &
! ! 4 0 ) '
! ! '
! ! '
! ! ( 2 *
! + + ( 2
-. 5*,*5*'!
. !5* 5&&* !
. 5,+'5'&+ &
+ . +5'++5-+ '
! . "67 *
! . ,5,--5+' *
! . ,5+- 5 &! ,
+-" % +
8 9 +
8 +!
+ $ 9 7 8 +'
+ 37
!-! # ) 6 8
!!
! # !*
! " !#
& ) 8
&-& $ +--& ** &
& $ +- '!*+ &
& + $ +-+ &+ &
& ! $ +-+ * &+
& & 1 % 3 &!
$ $ !
' " &'
' " : ; < &'
' " ) ; < &'
' + " : ) &'
' ! " &*
% $ & ' ( #
* / 0 0 #$
'-* / .
'-* = : . '
* 3 . '
* / # ) '&
* 3 # ) ''
* / . ',
* $ / .
*-* 3 / .
*-* . / . *
) * + , - %
2 0 *!
1 6 1 $ / *'
1 6 2 $ / ,
.
- /
# %
# 7 &
" % 0
-+ 8 #$
! $ 8 !
& 3 8 / 2 ,
' / 1 0
-* 3 8 1 0
, /
- 1 1 +
! ' *
+ ( ,
! (
-& 3 8
' $ 8 % 5*,*5*'!
* $ : . !5* 5&&* !
, $ 2 8 5,+'5'&+ &
- $ 8 % +5'++5-+ '
$ 8 ,,--+' *
$ 8 ,+- &! ,
$ 6 4 ; 4 < . +'
+ ) 8
!-! # ) 8 !
& . 0 6 !!
' . 6 ) !&
* . 8 !'
, . = 0 6 !*
- . 0 !,
# ) 9 &*
.
/ . '
+ . % '+
! . '!
& / # ) '&
' ) ''
, 1 8 / . ',
+- / . &
*-+ . *
+ *
.
+
1 : 7 !
# 9 ) 8 4
&-3: 0 5 9 &,
Capitulo 1
Introducción.
1.1 Introducción a la compañía Valeo.
Valeo es un grupo Industrial que se encuentra dentro de los primeros 10 proveedores de la Industria automotriz a nivel Mundial, se fundó hace cerca de 80 años y cuenta con varias divisiones entre las que se pueden mencionar:
División Productos
Enfriamiento de Motor Ventiladores, Radiadores
Limpiaparabrisas Limpiaparabrisas y partes de repuesto Térmico Habitáculo Aire acondicionado y calefacción Iluminación Lámparas y proyectores
Motores y Actuadores Motores de corriente directa de imán permanente Interruptores y sistemas de
detección Interruptores y sistemas de visión nocturna Sistemas Eléctricos Marchas y Alternadores
Electrónica Módulos electrónicos Sistemas de seguridad Llaves y seguros
Manejo del motor Módulos para control del motor
Compresores Compresores de aire
Transmisiones Discos, valeros y transmisiones manuales Servicio Partes en general para recambio.
$ )
Valeo cuenta entre sus clientes a BMW, FORD, HYUNDAY, HONDA, CHRYSLER, VW, GM, MITSUBISHI, VOLVO, TOYOTA, entre otros.
Valeo esta enfocado en el diseño, producción y venta de componentes, sistemas y módulos para la Industria Automotriz, esta presente en 26 países y emplea 70,400 trabajadores de 95 nacionalidades diferentes.
Realiza ventas anuales de 9.9 billones de Euros, invierte en investigación y desarrollo el 6.6% de las ganancias netas del grupo.
Para el año 2010 Valeo se proyecta para estar dentro de los 5 principales proveedores de la Industria Automotriz.
Este trabajo se enfoca a la división de Valeo Motores y Actuadores, para encontrar un método alternativo de detección de fallas en los motores eléctricos que ahí se fabrican y relacionar esa falla con su correspondiente falla en el proceso.
Desde la fundación de Valeo Motores y Actuadores en el año de 1984 se han usado los métodos estándares de prueba a motores eléctricos. Estos métodos que usan dinamómetros consisten en aplicar una rampa de carga al motor bajo prueba y medir durante la aplicación de la carga las características de velocidad y corriente del motor bajo prueba.
En esta Tesis se explica un método alternativo a los dinamómetros para probar los motores eléctricos de imanes permanentes que se manufacturan en Valeo Motores y Actuadores, el cual consiste en utilizar la inercia de la armadura para caracterizar un motor, sin necesidad de aplicar carga alguna. Este método se puede realizar en cerca de dos segundos. Además los resultados de esta prueba sirven como entrada a una red neuronal que clasificara los motores que sean probados.
Entre las ventajas de este nuevo método contra un dinamómetro normal se pueden mencionar:
1) Mayor rapidez de prueba.
2) Mayor repetibilidad ya que el motor bajo prueba sufre un calentamiento mínimo.
3) Construir un equipo de este tipo es mas barato que un dinamómetro normal. 4) Menor tiempo perdido en producción por fallas del equipo ya que no tiene
partes mecánicas o móviles.
5) Mantenimiento más fácil y económico. 6) Mejor clasificación de fallas.
7) Equipo que puede construirse para ser portable. 8) Mejor Control de calidad del motor bajo producción.
Como desventajas se pueden mencionar:
1) Solo se pueden probar motores donde la flecha de salida del motor es la flecha de la armadura.
Cuando una corriente pasa a través de la armadura de un motor de corriente continua, se genera un par de fuerzas debido a la acción del campo magnético, y la armadura gira. La revolución de la armadura induce un voltaje en las bobinas de ésta. Este voltaje es opuesto al voltaje exterior que se aplica a la armadura, y de ahí que se conozca como voltaje inducido o fuerza contraelectromotriz. Cuando el motor gira más rápido, el voltaje inducido aumenta hasta que es casi igual al aplicado. La corriente entonces es pequeña, y la velocidad del motor permanecerá constante siempre que el motor no esté bajo carga y tenga que realizar otro trabajo mecánico que no sea el requerido para mover la armadura. Bajo carga, la armadura gira más lentamente, reduciendo el voltaje inducido y permitiendo que fluya una corriente mayor en la armadura [2].
Debido a que la velocidad de rotación controla el flujo de la corriente en la armadura, deben usarse aparatos especiales para arrancar los motores de corriente continua. Cuando la armadura está parada, ésta no tiene realmente resistencia, y si se aplica el voltaje de funcionamiento normal, se producirá una gran corriente, que podría dañar el conmutador y las bobinas de la armadura. El medio normal de prevenir estos daños es el uso de una resistencia de encendido conectada en serie a la armadura, para disminuir la corriente antes de que el motor consiga desarrollar el voltaje inducido adecuado. Cuando el motor acelera, la resistencia se reduce gradualmente, tanto de forma manual como automática [2].
La velocidad a la que funciona un motor depende de la intensidad del campo magnético que actúa sobre la armadura, así como de la corriente de ésta. Cuanto más fuerte es el campo, más bajo es el grado de rotación necesario para generar un voltaje inducido lo bastante grande como para contrarrestar el voltaje aplicado. Por esta razón, la velocidad de los motores de corriente continua puede controlarse mediante la variación de la corriente del campo [2].
# % Brochas Imán Permanente
Armadura
De acuerdo a algunos autores ([3,4,5]), los motores CD se pueden dividir dentro de dos grandes grupos:
1. Motores de imán permanente, los cuales a su vez se dividen en:
I. Motores de corriente continua sin escobilla, motores que tienen una armadura estacionaria y una estructura rotatoria del campo.
II. Servomotores, motores de alto rendimiento, peso ligero y armadura de baja inercia.
2. Motores de corriente continua de campo devanado, los que a su vez se clasifican como: I. Motor en derivación, en el que el devanado del campo está conectado en
paralelo con la armadura.
II. Motor devanado en serie, en el que el devanado del campo está conectado en serie con la armadura.
III. Motor en compuesto, en el que se tiene un devanado del campo en serie y otro en paralelo.
En la Fig. 2 se pueden observar las conexiones de los motores de corriente continua de campo devanado donde de acuerdo a la terminología en [4] se expresan como:
=
= :
= :
# 7
Existen motores de imán permanente en tamaños de fracciones de caballo y de números pequeños enteros de caballos. Tienen varias ventajas respecto a los del tipo de campo devanado. Por ejemplo no se necesitan las alimentaciones de energía eléctrica para excitación ni el devanado asociado. Además se mejora la confiabilidad, ya que no existen bobinas excitadoras del campo que fallen y no hay probabilidad de que se presente una sobre velocidad debida a pérdida del campo. También se mejoran la eficiencia y el enfriamiento por la eliminación de pérdida de potencia en un campo excitador. Así mismo, la característica par contra corriente se aproxima más a lo lineal. Una característica de un motor de imán permanente es que se puede usar en donde se requiere un motor por completo encerrado para un ciclo de servicio de excitación continua [2].
causar desmagnetización parcial que cambia las características de velocidad y de par del motor, hasta que se restablece por completo la magnetización. En general, un motor de imán permanente de número entero de caballos es un poco más grande y más caro que un motor equivalente con devanado en derivación, pero el costo total del sistema puede ser menor. Un motor de imán permanente es un término medio entre los motores de devanado compuesto y los devanados en serie. Tiene mejor par de arranque, pero alrededor de la mitad de la velocidad en vacío de un motor devanado en serie. En la figura 3 se puede observar una foto de un motor de corriente directa de magnetos permanentes [2].
! "
# $
Los servomotores de corriente continua son motores de alto rendimiento que por lo general se usan como motores primarios en computadoras, maquinaria controlada numéricamente u otras aplicaciones en donde el arranque y la detención se deben hacer con rapidez y exactitud. Los servomotores son de peso ligero, y tienen armaduras de baja inercia que responden con rapidez a los cambios en el voltaje de excitación. Además, la inductancia muy baja de la armadura en estos motores da lugar a una baja constante eléctrica de tiempo (lo normal entre 0.05 y 1.5 mS) que agudiza todavía más la respuesta del motor a las señales de comando. Los servomotores incluyen motores de imán permanente, circuito impreso y bobina (o coraza) móvil. El rotor de un motor acorazado consta de una coraza cilíndrica de bobinas de alambre de cobre o de aluminio. El alambre gira en un campo magnético en el espacio anular entre las piezas polares magnéticas y un núcleo estacionario de hierro. El campo es producido por imanes de fundición de cuyo eje magnético es radial. El motor puede tener dos, cuatro o seis polos. Cada uno de estos tipos básicos tiene sus propias características, como son la inercia, forma física, costos, resonancia de la flecha, configuración de ésta, velocidad y peso. Aun cuando estos motores tienen capacidades nominales similares de par, sus constantes físicas y eléctricas varían en forma considerable. La selección de un motor puede ser tan sencilla como ajustar uno al espacio del que se disponga. Sin embargo, en general éste no es el caso, ya que la mayor parte de los servo sistemas son muy complejos [2].
%
$
La construcción de esta categoría de motores es prácticamente idéntica a la de los generadores de corriente directa; con un pequeño ajuste, la misma máquina de corriente continua se puede operar como generador o como motor de corriente directa [2].
%
!
$
Es el tipo de motor de corriente continua cuya velocidad disminuye ligeramente cuando el par aumenta. En los motores de corriente continua y especialmente los de velocidad prácticamente constante, la variación de velocidad producida cuando funciona en carga y en vacío da una base de criterio para definir sus características de funcionamiento [4].
Los polos de conmutación han mejorado la conmutación de los dinamos, de tal manera que es posible usar un entrehierro mucho más estrecho que los que se usaban en el pasado.
Como la armadura de un motor gira en un campo magnético, se genera una fuerza electromotriz (f.e.m.) en los conductores que se opone a la dirección de la corriente y se le conoce como fuerza contraelectromotriz. La f.e.m. aplicada debe ser bastante grande como para vencer la fuerza contraelectromotriz y también para enviar la corriente de la armadura a través de , la resistencia del devanado de la armadura y las escobillas [4].
%
$
Es el motor cuya velocidad disminuye sensiblemente cuando el par aumenta y cuya velocidad en vacío no tiene límite teóricamente.
Los motores con excitación en serie son aquellos en los que el inductor esta conectado en serie con el inducido. El inductor tiene un número relativamente pequeño de espiras de hilo, que debe ser de sección suficiente para que pase por él la corriente que requiere el inducido. En los motores serie, el flujo depende totalmente de la intensidad de la corriente del inducido [4].
Si el hierro del motor se mantiene a saturación moderada, el flujo será casi directamente proporcional a dicha intensidad.
Si la carga en un motor devanado en serie se hace pequeña, la velocidad aumenta mucho, de modo que un motor de este tipo siempre debe conectarse a la carga a través de un engranaje reductor o directamente. Si se conectara mediante banda y ésta se rompiera, la velocidad del motor se dispararía y el motor probablemente estallaría.
%
$
Con características intermedias entre el motor derivación y el motor serie, este motor puede ser compuesto acumulativo y compuesto diferencial.
En el caso de los motores que se fabrican en Valeo Motores y Actuadores se trata de motores de corriente directa de imán permanente de potencia baja en el orden de los 150 a 300 watts.
%
Como lo describe en [8], a continuación se explica el modelo de un motor de corriente directa de magnetos permanentes.
Los motores de corriente directa son uno de los sistemas para movimiento más
utilizados en la industria el día de hoy, hace algunos años los motores de corriente alterna eran usados para propósitos de control, aunque en realidad son mas difíciles de manipular,
especialmente para aplicaciones de posición y sus características no son tan lineales, lo cual hace su análisis mas complejo. Los motores de corriente continua, por otro lado, son más caros.
Antes del completo desarrollo de la tecnología de magnetos permanentes, el torque por unidad o peso de un motor CD con un magneto permanente estaba muy lejos de lo deseado, hoy con el desarrollo de los magnetos permanentes de tierras raras, es posible alcanzar relaciones grandes de torque vs. volumen y los costos de estos motores son razonables, además los avances hechos en las tecnologías de las brochas y el conmutador han hecho que estas partes desgastables no requieran prácticamente mantenimiento. Los avances desarrollados en la electrónica de potencia han hecho posible el diseño de motores sin brochas y han sido muy populares en sistemas de control de gran desempeño. Los avances en técnicas de manufactura también han producido motores sin hierro en el rotor que tienen muy baja inercia y adquieren una relación grande de torqueHinercia.
Las constantes de tiempo bajas en estos motores han abierto nuevas posibilidades de aplicación en dispositivos periféricos computacionales como impresoras, lectores de CDs, al igual que ha sucedido con la automatización de maquinas de herramientas en la industria.
%
&
"
Un motor CD es básicamente un transductor de torque que convierte una energía eléctrica en una energía mecánica. El torque desarrollado por la flecha del motor es directamente proporcional al campo magnético y a la corriente de la armadura, la relación entre el torque, el flujo magnético y la corriente de la armadura es [8]:
) ( )
( = φ
En adición al torque desarrollado, cuando un conductor se mueve en un campo magnético se genera un voltaje en sus terminales que es proporcional a la velocidad de la flecha y tiende a oponerse al flujo de la corriente, este voltaje es conocido como fuerza contraelectromotriz, la relación de este voltaje y la velocidad es [8]:
) ( )
( = φω
donde denota la fuerza contraelectromotriz en volts y es la velocidad de la flecha en radianes por segundo, estas dos ecuaciones representan las bases de la operación del motor de corriente directa.
Debido a que los motores de corriente directa son usados en una amplia gama de sistemas de control, a continuación se representa el modelo matemático para propósitos de análisis, para esto se usara el circuito equivalente de la figura 4 para representar al motor [8].
+ 8 #$
La armadura es modelada como un circuito con una resistencia conectada en serie con una inductancia , una fuente de voltaje representando la fuerza contraelectromotriz en la armadura cuando gira el rotor. Las variables y parámetros se definen como sigue [8]:
=
= = =
= 8
= 8
φ =$ =
=# 8
=
= :
=# 0 = =
φ= : 6
ω = =
=# 0 )
En referencia al circuito de la figura 2, el control del motor es aplicado a las terminales de la armadura en la forma de voltaje aplicado . Para un análisis lineal se asume que el torque desarrollado por el motor es proporcional al flujo magnético y a la corriente de la armadura. Entonces.
) ( )
( = φ
Debido a que φ es una constante, la Ec. 1.3 se escribe como:
) ( )
( =
donde es la constante de torque en
Empezando con el control de la entrada de voltaje las ecuaciones de causa y efecto para el circuito de la Fig. 4 son:
1 ) ( 1
− −
=
) ( )
ω ο
= =
ο ο ( ) = 1 − 1 −
2 2
donde representa una carga de fricción.
Las ecuaciones 1.5 a la 1.8 consideran que el voltaje aplicado es la entrada;
La ec. 1.5 considera que es el efecto inmediato debido a ; en la ecuación 1.6
causa el torque ; la ecuación 1.7 define la fuerza contraelectromotriz y finalmente en la ecuación 1.8 el torque causa la velocidad angular ω y el desplazamiento ο .
Las variables de estado del sistema pueden ser definidas como ,ω y ο . Por medio
de substitución directa y eliminando las variables que no son de estado de las ecuaciones 1.5 a la 1.8, las ecuaciones de estado del sistema del motor de corriente directa son escritas en forma matricial [8]:
− + + − − − = 0 1 0 0 0 1 0 1 0 0 0 ο ω ο ω
Nótese que en este caso, es tratado como una segunda entrada en las ecuaciones de estado.
! $ 8
'
(
)
Por mucho tiempo la computación tradicional (secuencial y basado en lógica digital), ha servido para la resolución de muchos problemas prácticos en muchas áreas y en otras han sido menos eficientes. Uno de esos problemas es la imitación o reproducción artificial de la actividad humana, o de parte de esta; por ejemplo, el ser humano basado en ejemplos, modelos y patrones y con la realimentación de un maestro (que en ocasiones tampoco es necesaria) aprende fácilmente a reconocer la letra A dentro de un grupo de letras o a diferenciar un gato de un pájaro. El ser humano además es capaz de definir, optimizar sus respuestas para lograr un mejor comportamiento [12].
El desarrollo de las redes neuronales artificiales comenzó hace aproximadamente 55 años, motivado por el deseo de entender la capacidad de razonamiento y entendimiento del cerebro humano y emular algunas de sus fortalezas y capacidades.
En el desarrollo de las redes neuronales se pueden distinguir claramente tres etapas [12]: 1. Surgimiento y desarrollo de los primeros modelos.
2. Crítica a los modelos creados, dudas sobre el futuro y estancamiento de las Redes Neuronales Artificiales.
3. Reanimación o renacimiento de las Redes Neuronales Artificiales (RNA).
En la primera etapa, aparecen los primeros modelos de redes neuronales. Se crea una máquina que trata de simular el cerebro respondiendo a estímulos que previamente se fijaron. Aparecen las primeras variantes informáticas y es la etapa de las definiciones, de la aparición de modelos que dan solución a problemas de tipo teórico y las primeras aplicaciones. Esta etapa termina cuando no se puede demostrar ni encontrar modelos más potentes y que resolvieran exigencias en cuanto a capacidad computacional, lo cual sembró la duda en todo el mundo sobre el futuro de las redes neuronales (ejemplo : problemas no lineales) [12].
La segunda etapa está marcada por un pobre desarrollo de las redes neuronales artificiales (RNA), muy pocos trabajan en ello y con pocos resultados. Es la etapa en que se desarrollan otras ramas de la inteligencia artificial que también tienden a resolver esos problemas pero con otros enfoques [12].
sofisticadas y que cubren mucho mayor rango de aplicaciones que las primeras. Además el rápido desarrollo de las PC y las velocidades actuales permiten simular y procesar las RNA con mucha mayor facilidad. También la tecnología actual es capaz de producir hardware específico para redes neuronales (implementación) [12].
No obstante esto, las limitantes del procesamiento computacional actual, que implícitamente es secuencial hace que el desarrollo de las RNA se oriente hacia nuevas metas. Tal es así que en la actualidad se desarrollan proyectos para crear redes masivamente paralelas, que realmente procesen toda la información de forma simultánea, como realmente lo hace el cerebro humano. De ahí que se integra la computación, el procesamiento paralelo y el estudio de nuevas características del sistema neuronal biológico. Estas y otras líneas de investigación se integran en la llamada NEUROHCOMPUTACION, una nueva ciencia.
Las RNA son de interés para muchos investigadores de diferentes áreas, para los ingenieros eléctricos en muchas aplicaciones de procesamiento de señal y teoría de control, para los ingenieros electrónicos y de computación en la búsqueda de nuevas tecnologías y hardware que potencien las redes neuronales y para su implementación en robótica. Los informáticos y técnicos en ciencias de la computación la aplican para resolver problemas en áreas como la inteligencia artificial y reconocimiento de patrones. Para los matemáticos, las RNA son una herramienta poderosa para modelar problemas donde la relación explícita entre varias variables no se conoce. Para esferas de detección de fallos, control de procesos, medicina, en fin en casi todos los sectores del universo científico.
'
! *
(
)
*
Una red neuronal artificial es básicamente un modelo matemático para procesamiento de información, implementado por hardware o por software y que tiene una entidad propia expresada en un conjunto de parámetros internos, arquitecturas y modelos que la diferencian de otras técnicas y que reúne algunas características comunes con las RN biológicas [12].
Las redes neuronales se han desarrollado como una generalización de los modelos matemáticos existentes del conocimiento humano o de la neurona biológica asumiendo entre otras cosas que:
1. El procesamiento de la información se efectúa en muchos elementos simples llamados comúnmente neuronas.
3. Cada enlace o conexión entre neuronas tiene un peso asociado, que constituye un parámetro interno de la conexión y que en modelos típicos multiplica la señal transmitida o propagada de neurona a neurona.
4. Cada neurona calcula su salida (suma de sus entradas pesadas) aplicándole una función de activación que normalmente es no lineal.
De esta forma una red neuronal se caracteriza por:
1. Un patrón de conexiones entre las neuronas (llamada arquitectura).
2. Su método o forma de determinar los pesos de las conexiones (llamado entrenamiento, aprendizaje o algoritmo).
3. Su función de activación.
'
+,
"
+
Las Redes Neuronales Artificiales, como su nombre lo indica, son semejantes a las de los sistemas biológicos donde la actividad neuronal biológica es tanto desde el punto de vista físico, morfológico o de estructura química, un proceso excesivamente complejo y que se ha tratado de simplificar tomando algunas de sus características principales y llevándolas a un modelo matemático.
En una neurona biológica las señales entran a la misma a través de las dendritas. La conexión entre la fuente de la señal y la dendrita se llama sinapsis. La señal viaja a través de dichas dendritas hacia el cuerpo de la célula, el cual combina las señales recibidas y si el umbral se sobrepasa, la célula envía un impulso eléctrico hacia el axón. El axón, a su vez, hace contacto con otras neuronas a través de múltiples sinapsis [12].
& 3 8 / 2
Este esquema genérico de una neurona biológica servirá para explicar de forma bastante exacta la forma en que operan.
Una neurona biológica tiene 3 tipos de componentes que son de particular interés para entender posteriormente el funcionamiento de una neurona artificial que son :
1. Dendritas 2. Cuerpo (suma) 3. Axón
Una neurona biológica (NB) tiene muchas dendritas, las cuales son responsables de la recepción de las señales o estímulos eléctricos provenientes de las otras neuronas. Estas señales, o impulsos eléctricos, se trasmiten a través de la sinapsis como resultado de un proceso químico. La acción del transmisor (originado por un proceso químico) modifica la señal que entra a la neurona, generalmente variando la frecuencia del impulso [12].
El cuerpo de la NB “suma” las señales de entrada y genera una salida, o sea trasmite una señal a través del axón hacia otras neuronas. Esta forma en que trabaja la neurona biológica permite tratarla de dos maneras diferentes, ambas perfectamente válidas. En un instante de tiempo se puede asumir que la neurona o trasmite un impulso o no, por tanto desde este punto de vista se puede decir que es binaria. Sin embargo, la transmisión de las señales de una neurona a otra es asincrónica, su frecuencia varía, de modo que también se puede ver como una señal que varía su magnitud siendo en unos casos mayores y en otros menores. Esta forma normalmente se aborda cuando se necesita darle un tratamiento a su magnitud y siempre es discreto [12].
Los rasgos principales que servirán de base para el diseño de la neurona artificial son: Axόn desde otra
neurona
Cuerpo
Sinapsis
Dendrita
Dendrita de otra neurona Sinapsis
Dendrita de otra neurona
1. Los elementos de procesamiento reciben muchas señales.
2. Las señales pueden modificarse por los pesos de las sinapsis receptoras. 3. Los elementos de procesamiento suman las entradas pesadas.
4. Bajo ciertas circunstancias (entradas suficientes), la neurona trasmite una salida simple.
5. La salida de una neurona particular puede ir hacia otras neuronas (a través del axón). 6. La información se procesa de forma local.
7. La memoria sea distribuida.
8. La fuerza o peso relativo de la conexión pueda modificarse con la experiencia. 9. Una neurona puede excitar o inhibir la respuesta de otra.
De esta forma queda planteado el problema para el diseño de la neurona artificial:
'
(
*
' / 1 0
En esta neurona artificial general mostrada en la figura 7 se destacan : 1, 2,...., . Son los
vectores de entrada, y pueden provenir de otras neuronas o simplemente ser un estímulo externo. 1, 2,...., es el vector de pesos : Es el encargado de pesar, restarle o darle importancia al estímulo proveniente de otra neurona o del exterior. Puede tomar valores positivos o negativos (excitatorios o inhibitorios respectivamente). Normalmente se normaliza inicialmente pero toma valores reales. El vector de entrada también suele normalizarse.
: Es la función de activación. Modifica las sumas generando una salida no lineal (generalmente) que se puede trasmitir a otras neuronas.
Si se realiza una analogía con una neurona biológica se puede distinguir que 1, 2,...., son los estímulos de entrada que provienen de los axones de otras neuronas, los pesos son las sinapsis (una especie de vacío que hace resistencia al estímulo o posibilita su transmisión), y las funciones sumatoria y de activación (F) constituyen el cuerpo o suma, que es el elemento procesador. Por último la salida se trasmite a través de otro axón a diferentes neuronas [12].
Matemáticamente quedará:
Σ
=
=1
donde :
: i = 1,2,...,n Vector de entrada. : i = 1,2,...,n Vector de pesos. : Función de activación.
: Salida de la neurona.
De esta forma se obtiene el modelo matemático de una neurona.
Una neurona de por sí, aunque reúne ciertas características muy importantes es muy pobre ella sola; de modo que siempre, estará integrada en una red cuyas características variarán en dependencia de la aplicación.
Algunos rasgos típicos de las Redes Neuronales Artificiales son:
1. * . Las RNA al igual que las RNB son muy tolerantes a fallas. En primer lugar las RNA después de entrenadas son capaces de reconocer muchas señales de entrada que tienen ciertas diferencias con las señales con que fueron entrenadas anteriormente. En segundo lugar, una RNA también es capaz de dar una respuesta correcta aún en casos en que su estructura haya sido dañada de alguna manera. Esta característica es fácil de explicar si se tiene en cuenta que el conocimiento en una red neuronal es distribuido y fallas en algunos elementos de procesamiento podrán provocar solo ciertas alteraciones en el comportamiento de la red, e incluso, para redes no supervisadas o con entrenamiento continuo, esos daños suelen ser solo temporales. (Memoria asociativa y memoria distribuida) [12].
3. Extracción de características “de forma empírica” de los ejemplos de entrenamiento. 4. Requieren poco espacio de almacenamiento.
5. Paralelismo masivo. Se procesan las entradas a la vez, no son secuenciales.
6. No son necesariamente determinísticas, no siguen un conjunto de reglas para determinar las diferentes arquitecturas de red con sus características.
7. No son elaboradas a partir de una unidad central de procesos de gran complejidad, sino que se elabora a partir de elementos simples que ejecutan la acción.
8. El conocimiento es una función de la arquitectura de la red. 9. Tienen gran número de conexiones entre los elementos.
Estas características hacen que la red neuronal se ubique como área con características propias dentro de la Inteligencia Artificial.
-
"
+
* 3 8 1 0
En este esquema general hay varias cosas a detallar.
1. La existencia de un nodo independiente, llamado sesgo que introduce en la RN un conjunto de conexiones independientes del vector de entrada y que permiten lograr durante el entrenamiento y la operación de la red un desplazamiento fuera del origen de un plano formado por las diferentes respuestas que da la red. (Es el término independiente de la ecuación de una recta.)
2. La organización por capas de los nodos, es un ordenamiento de neuronas a diferentes niveles de forma que esas conexiones tienen un orden establecido que normalmente va de una capa a otra y no dentro de la misma capa.
3. Una gran densidad en la conexión.
4. Típicamente las neuronas de la misma capa tienen un comportamiento similar (expresado normalmente en una función de activación común) y en general siguen de una capa a otra el mismo patrón de conectividad.
5. La llamada capa de entrada es en muchas ocasiones una capa que da como salida el mismo estímulo recibido, por tanto cuando se dice la cantidad de neuronas o capas, normalmente no se incluye a la capa de entrada.
De forma general las redes neuronales de acuerdo a su arquitectura se clasifican en [12]:
, /
Como se aprecia en la figura 9, hay 2 tipos de arquitecturas generales, a saber, las redes Ante Alimentadas y las recurrentes o Retroalimentadas.
En las redes ante alimentadas la conexión entre neuronas es a través de capas de forma tal que la información y los estímulos solo se trasmiten en una dirección, las conexiones son unidireccionales.
De forma gráfica se puede distinguir pues no hay lazos cerrados, los grafos no se cierran nunca; por esta característica estas redes se conocen como a lazo abierto. Estas también tienen la característica de que son estáticas, generan solo un conjunto de salidas para una secuencia de valores en la entrada. Este tipo de redes, además, son menos memorísticas, en el sentido que ellas responden a una entrada de forma independiente al estado anterior de la red [12].
- 1 1
' % &
El proceso de aprendizaje constituye el elemento fundamental que determinará el comportamiento futuro de la red. Una red bien escogida y mal entrenada nunca dará un resultado que se pueda considerar satisfactorio [12], sin embargo, una red que no se haya seleccionado de forma tal que su arquitectura sea óptima para la aplicación si puede dar resultados satisfactorios si se entrena bien.
Para entender o diseñar un proceso de aprendizaje, primeramente se necesita conocer un modelo del entorno en que la red opera, se debe conocer con que información contará la red para aprender. Esto es necesario para determinar el modelo de aprendizaje. En segundo lugar, para conocer como los pesos de la red pueden ser actualizados, se debe determinar que reglas de aprendizaje gobiernan la fase o proceso de actualización. En otras palabras se debe conocer el algoritmo de aprendizaje (procedimiento mediante el cual se aplican las reglas de aprendizaje para la actualización de los pesos entre las conexiones (parámetro interno de la red).
conocido también como de entrenamiento auto supervisado [12]. Sin embargo, en general hay una correspondencia entre el tipo de entrenamiento y el tipo de problema a resolver, por tanto se resumirán las características básicas de ellos y el tipo de problemas en los que típicamente se encuentran.
' %
#
$
Es quizás el tipo de parametrización o fijación de los pesos o parámetros de la red más utilizado. Comienza con la toma de una secuencia de vectores de entrenamiento que caractericen bien el problema tratado. Estos vectores patrones tienen asociados un vector de salida. Los pesos se ajustan teniendo en cuenta un algoritmo de aprendizaje que permite ir reasignándole valores a los pesos de forma tal que los vectores de entrenamiento cuando se propaguen o apliquen a la red den una salida cuya dirección (error) con la deseada sea cero o muy pequeña [12].
Algunas de las primeras y más simples RN han sido diseñadas para clasificación de patrones. Por ejemplo para clasificar un vector de entrada como perteneciente a una clase o a otra. En este tipo de clasificación la salida es un elemento bivalente (1 y H1 normalmente).
La asociación de patrones es otra forma especial de problemas de reconocimiento o mapeado. En este tipo de aplicación no se desea una respuesta de tipo identificación ON/OFF, sino la asociación o identificación de un patrón. De esta manera la red pudiera ser entrenada para que asociara un conjunto de vectores de entrada con su correspondiente juego de vectores de salida. Este tipo de red se dice que son de memoria asociativa. Si el vector de salida es el mismo que el de entrada se dice además que la red es de memoria auto asociativa. Si por el contrario es diferente la red es heteroasociativa. Estas redes pueden ser tanto del tipo ante alimentadas como recurrentes y son capaces de identificar vectores similares a los que sirvieron para el entrenamiento.
' %
$
' '
*
$
La función de activación en una neurona puede ser de dos tipos : las que son lineales y las no lineales. Suelen distribuirse de la misma manera en una misma capa, suelen ser para una misma capa y en modelos multicapas se pueden combinar funciones no lineales con funciones lineales obteniéndose muy buenos resultados.
' '
.
=
)
( para todo
Las redes por lo general usan esta función en la capa de entrada. En redes recurrentes se usan mucho. Una representación gráfica de esta función se puede apreciar en la figura 12.
' '
.
"
/
"
Θ0
Las redes de capa sencilla normalmente usan esta función para convertir las entradas de la red que son variables continuas en una salida binaria (1 ó 0) ó bipolar (1 ó H1). Esta función es fuertemente no lineal y en algunas redes no se pueden utilizar, pues no son derivables.
Su expresión es:
) ( =
< ≥
x si 0
x si 1
A esta función también se le conoce como función umbral o de disparo o también con el nombre de función de Heaviside.
Más general se puede definir como:
) ( =
< ≥
x si b
x si a
θ θ
Se representa en la figura 13:
' '
.
# +
"
Estas son quizás las más utilizadas de todas las funciones de activación. La función logística o sigmoide y la tangente hiperbólica son las de uso más común. Son especialmente útiles en algoritmos como Retropropagación o la regla Delta (Perceptrón). Tienen la gran ventaja de que son derivables y mantienen la propiedad de ser no lineales, pudiéndose variar el grado de no linealidad [12].
La llamada función logística, es una función sigmoide en el rango de 0 a 1. Se utilizan mucho en aquellas redes en las que los valores de salida deseados son binarios o continuos en un intervalo entre 0 y 1. Para destacar esta característica se le llamara Sigmoide Binaria (o Sigmoide logística).
Su expresión es:
σ −
+
=
1
1
)
(
y su derivada en términos de ella misma : ´( )=σ* ( )*[1− ( )]
Gráficamente en la figura 14:
+ (
En la Fig. 14 se han graficado dos curvas para que se aprecie el efecto del parámetro σ en la pendiente de la curva. Mientras σ crezca la sigmoide se irá “cerrando” y tenderá a la función umbral vista anteriormente. Las gráficas son para σ!" (curva discontinua) y para
σ!# (curva continua). Obsérvese, además, que las gráficas tienen asíntotas horizontales en 0 y 1.
' ' % .
# +
"
$
−ΓΓ −
+
−
=
1
1
)
(
Su derivada se puede expresar en términos de la función de la misma manera que se obtuvo para la sigmoide binaria vista anteriormente. Esto ayuda mucho computacionalmente al no tener que calcular la función y su derivada, sino solamente realizar algunas sumas (restas) y productos que no demoran grandemente la obtención de los resultados [12].
Estas familias se pueden escalar a diferentes rangos, el más usado es entre (H1 y 1). Es la más utilizada en problemas que implican sigmoide y se representa (para Γ = 1) en la figura 15.
! (
Esta función está estrechamente ligada con la tangente hiperbólica. La tangente hiperbólica, es por tanto, otra de las funciones de activación y también va del rango de H1 a 1, solo queΓ no es variable sino que toma el valor 2.
$
22
1
1
)
(
−−
+
−
=
Se conoce el proceso de prueba tradicional de motores de corriente directa mediante el uso de un dinamómetro, se muestra un esquema en la figura 16, en el cual se aplica una rampa de carga al motor bajo prueba y en cada instante de muestreo de datos se mide la velocidad, la torsión y la corriente del motor bajo prueba, como dispositivos sensores se usan: un sensor de corriente, un sensor de velocidad y un sensor de torsión.
&
1232124'
“Método y aparato para probar motores eléctricos”.
El motor eléctrico bajo prueba es montado rígidamente en una plataforma estacionaria y es fijamente acoplado con un transductor de torque y velocidad a una carga de un motor eléctrico. Inicialmente, el motor de carga es energizado para que mueva el motor bajo prueba sin energía a una velocidad constante, luego la energía eléctrica es cambiada del motor de carga al motor bajo prueba. Ahora el motor de carga funciona como generador y es acoplado a un circuito el cual controla la corriente directa para variar la carga del motor eléctrico para así producir una desaceleración lineal seguida de una aceleración lineal en un corto periodo de tiempo. Los transductores generan señales análogas que son convertidas a señales digitales y grabadas en memoria, estas señales digitales son procesadas para medir las características del motor bajo prueba.
A continuación se muestra la figura 17 donde se pueden observar sus principales componentes:
Esta invención esta relacionada a un método y un aparato para probar las características dinámicas de un motor eléctrico en un corto tiempo, lo cual previene el calentamiento del motor eléctrico bajo prueba.
Debido a que el calentamiento del motor eléctrico bajo prueba puede afectar las características de desempeño del mismo, es deseable realizar la prueba en el menor tiempo posible.
En este método el motor bajo prueba es montado rígidamente a una plataforma fija y es operado externamente a una velocidad de operación. El motor eléctrico de carga es energizado y se aplica una rampa de aceleración o desaceleración. Los transductores acoplados al motor de carga que incluyen un sensor de torque producen una señal análoga la cual es convertida a su correspondiente señal digital y es grabada en memoria. Cuando termina el intervalo de prueba por tan solo algunos segundos , la memoria es leída para producir un despliegue visual del desempeño del motor.
Un objetivo de esta invención es proveer un método mejorado y un aparato para automáticamente probar motores eléctricos a una velocidad máxima de operación para desacelerar y acelerar el motor para de esta forma medir diferentes características de los parámetros de un motor eléctrico.
En la Fig. 17 un motor eléctrico (20) el cual será probado, tiene su cuerpo (22) montado rígidamente con una cinta (24) a una plataforma fija (26), la cual esta también fija.
La cinta (24) es removible para facilitar el reemplazo de otro motor a probar, removiendo la tuerca (28) del tornillo (30) el cual esta fijo a la cinta (24) se puede ajustar la apertura de la plataforma (26), la flecha (32) del motor bajo prueba (20) esta fija y acoplada al acople (34) el cual conecta un transductor con la flecha (36). La flecha transductor (36) se extiende en una abertura estacionaria a la pared (38) y a un acoplamiento (40) el cual esta fijado a la flecha (42) del motor de carga (4), el motor de carga tiene un cuerpo de sujeción que esta fijo por medio de los bloques (46).
El torque es medido por un transductor de torque (50) el cual incluye la flecha (36), la señal de salida del transductor de torque es detectada por el transformador asociado con el cuerpo (52) el cual esta fijo con la pared (38), la señal del transductor es acoplada a la línea (56) para detección de torque con el sensor de torque convencional (60) para producir una señal de salida a la línea (62), una señal análoga representativa del torque .
velocidad, los pulsos producen una salida en la línea (70) de un voltaje proporcional a la velocidad de la flecha (32).
Transductores adicionales y circuitos de medición son usados para cada parámetro que se desee medir del motor bajo prueba. Un multiplicador de potencia (72), en respuesta a la señal de torque en la línea (62) y la señal de velocidad en la línea (70), multiplica la medición de torque y velocidad por una constante y da su salida en la línea (74) como una señal análoga continua representando el poder instantáneo mostrado por el motor bajo prueba (20). Un circuito con instrumentos de medición eléctrica (78) provee las señales análogas correspondientes para indicar varias características eléctricas de entrada. La temperatura de prueba del motor (20) es detectado por un termocople convencional montado sobre el motor bajo prueba, el termocople es conectado a un circuito de temperatura (82) y este a su vez provee una salida en la línea (84) con una señal análoga proporcional a la temperatura.
Durante la prueba del motor (20) las señales de salida en la líneas (62),(70),(74),(80) y (84) son multiplicadas por los apropiados factores de escalamiento en el circuito de acondicionamiento (90) y son acoplados a un multiplexor (92) el cual muestrea cada línea de entrada para mostrar una salida análoga en su representación. Esta señal es convertida por un circuito análogo a digital (94) en una señal puramente digital y esta señal digital es almacenada en alguna localidad (96) de la memoria (98), por ejemplo en la memoria (96) se podría almacenar la velocidad muestreada del motor bajo prueba (20).
&
'12
1552
“Método de medición de características de un motor de corriente directa, aparato para implementar el método y método para calcular el voltaje inductivo”
Como se puede observar en la Fig. 18 la corriente eléctrica suministrada al motor CD y la velocidad rotacional son medidas. Un voltaje inductivo 0 es calculado en base a la
relación que existe entre el periodo de tiempo 2 después de la aplicación del voltaje al motor CD cuando es detenido y es proporcional al voltaje en las terminales del motor CD. La corriente eléctrica suministrada al motor CD cuando la rotación del motor CD es bloqueada es medida mientras se aplica voltaje al motor CD cuando un polo magnético del estator del motor CD no esta magnetizado. El torque del motor de CD cuando la rotación del motor esta bloqueada es medida en base a la corriente suministrada al motor de CD y es usado para determinar las características de torque del motor.
&
13%4145%
“Método y aparato para prueba de motores de corriente directa”
Es un método de prueba de motores CD en el que se aplica primero un voltaje constante para probar el motor y luego una corriente constante, los resultados de la medición se comparan contra una referencia, se muestra un esquema en la figura 19.
Particularmente motores de corriente directa de magnetos permanentes involucrando la aplicación de un voltaje constante a las terminales del motor y antes o después causando un flujo de corriente constante a través del motor. El voltaje constante es aplicado en las terminales del motor por un determinado periodo de tiempo durante el cual la corriente que fluye en el motor es comparada contra un nivel de referencia. Si la corriente esta por debajo del nivel de referencia durante el primer periodo predeterminado significa que el motor es defectuoso. La corriente constante fluye por otro periodo de tiempo determinado por el motor CD, si al final de este segundo periodo determinado de tiempo el voltaje en el motor esta por debajo del primer nivel de voltaje o arriba del segundo nivel de referencia entonces el motor es encontrado como defectuoso.
, $ 2 8 5,+'5'&+
Fuente de Poder Voltaje Constante
Sensor de
Corriente Interruptor corriente H voltaje
Motor bajo prueba
Comparador de Voltaje
Comparador de Corriente
Mensaje aceptar o rechazar
Fuente de poder Corriente constante
% &
%14%%16%
“Método para prueba de motores de corriente directa”
En la figura 20 se puede observar un diagrama esquemático de la patente norteamericana número 4,744,041
Es un método para medir las características de un motor CD basado en el tiempo de respuesta de la corriente, este método no requiere acoplamiento mecánico alguno al motor bajo prueba. La velocidad del motor es determinada por medio de la composición de frecuencia de los pulsos de conmutación por medio de una transformada rápida de Fourier a la señal de la corriente. La frecuencia donde hay mayor cantidad de energía es dividida por el número de barras de conmutación para determinar su velocidad.
- $ 8 % +5'++5-+
Computadora
Amplificador de Poder
Sensor de corriente
Motor bajo Prueba
Forma de onda de voltaje de
Voltaje de
Corriente
' &
( +
78
2.5.1 Patente 9900473
“Sistema de detección de fallas basado en modelo para motores eléctricos basado en un modelo”.
En la Fig. 21 se puede observar un diagrama a bloques de la patente numero 9900473. Esta invención se refiere a un sistema de detección de fallas basado en modelo y a un método para monitorear y predecir requerimientos de mantenimiento de motores eléctricos. Puesto que el método y el sistema de esta invención se basan en programación y emplean datos obtenidos a partir de mediciones no intrusivas, los costos de implementación son significativamente menores que los costos de implementación de los métodos de mantenimiento de técnicas anteriores. Este sistema comprende un dispositivo de cómputo conectado a sensores que proporcionan información continua, en tiempo real, del voltaje de entrada, corriente y velocidad del motor. El sistema y el método emplean un algoritmo de formación de modelo experimental de variables múltiples para obtener una descripción matemática del motor . El algoritmo compara el resultado modelado con un resultado medido y cuantifica la comparación en términos de un residuo generado restando las señales respectivas. Un observador de diagnostico analiza el residuo y determina si el motor esta libre de fallas o bien no opera de una manera exenta de fallas. Al detectar la falla inminente, el observador de diagnostico evalúa las variables medidas del motor, determina la desviación en relación con el valor de referencia y desarrolla un diagnostico del probable componente que esta fallando. Otra modalidad de esta invención es especialmente para llevar a cabo pruebas de control de calidad.
'
&
3%6
5'
“Método y aparato para probar rotores de motores eléctricos”.
En la Fig. 22 se puede observar un diagrama a bloques de la patente numero 9401365. Es un aparato de prueba para rotores eléctricos que comprende un accesorio de prueba que incluye una flecha, en donde un rotor se conecta temporalmente a una carga inercial conocida. Un estator crea un campo magnético giratorio para provocar rotación de rotor y un codificador detecta la cantidad de rotación angular del rotor en cortos intervalos de tiempo, que se registran en una memoria y se emplean posteriormente para calcular el par de torsión. Una marca de señalamiento desde el codificador, indica cada revolución completa del rotor y puede emplearse para determinar la ubicación de un segmento defectuoso del rotor por referencia a una marca de punto de arranque colocada en el rotor antes de la prueba, Un circuito de control electrónico inicialmente aplica una corriente eléctrica de valor bajo al estator, para crear un campo magnético giratorio para provocar que el rotor gire a una velocidad mas lenta que la normal para mejorar la resolución de la medida de par de torsión. Después de que el rotor ha acelerado a un valor predeterminado, el voltaje de estator puede incrementarse. La cantidad de rotación del rotor conforme se acelera a una velocidad predeterminada, se emplea para calcular el par de torsión o torque actual.
5
Se puede observar que a través del tiempo han surgido varios métodos para caracterizar un motor de corriente directa y cada vez pretenden ser más eficientes, baratos y simples, tal hecho se demuestra con las patentes aquí mostradas donde es de destacar como los probadores de motores de corriente directa han ido evolucionando para ser cada vez mejores.
También es digno de mencionarse que en busca de la más alta calidad de los productos que demandan todos los clientes para aplicaciones de motores eléctricos, los probadores tienen que ser no solo más rápidos sino también más eficientes, esto incluye costo de implementación de los probadores, costos de mantenimiento, rapidez de prueba, etc.
&
-
"
!
.
La propuesta consiste en utilizar este método para caracterizar la respuesta de corriente y velocidad de un motor de corriente directa desde su estado de reposo hasta alcanzar su máxima velocidad con respecto al torque sin necesidad de aplicar carga al motor. Esto dará como resultado la curva de desempeño del motor que sé este probando. Para utilizar este método ya no es necesario calcular o medir la inercia de la armadura del motor que sé este probando.
Al investigar los métodos existentes para poder realizar la prueba de inercia, se encontraron algunas ecuaciones matemáticas [1] que podrían ser usadas para los propósitos de la tesis. Estas ecuaciones se muestran a continuación:
ω
+
= ( )
)
( ; <
Donde:
= 8 "
= 8
=
=
ω
1
En esta ecuación se cumple que si no se aplica carga al motor =0 por lo que la
=
)
( ; <
En Teoría si se consigue obtener la caracterización de velocidad de un motor desde su arranque hasta su máxima velocidad se puede entonces obtener la aceleración del motor con respecto al tiempo, si se logra medir o calcular la inercia de la armadura del motor que se desea probar se podrá encontrar su respuesta en Torque.
Problema: ¿Cómo medir la Inercia de la Armadura?. Hay varios métodos tanto empíricos como matemáticos para la medición de la Inercia de la armadura, sin embargo durante la investigación surgió una nueva idea.
La idea fue prácticamente encontrar la relación que existe entre velocidad, corriente y torque en un motor de corriente directa.
(
-
9
De acuerdo a [1].
Se sabe que:
) ( )
( = φ
donde.
= 8
=#
φ= : 6
=#
$( )+ ( )
=
de donde
$( )
)
( = −
$= :
=) :
=# 1
) ( )
(
$ = φω
Donde.
ω=)
Despejando de 2.5 y 2.6 $ e igualando se obtiene:
φ ω( )= − ( )
Si se despeja φ de Ecuación 2.7 se obtiene:
) (
) (
ω φ = −
Si se miden las características de corriente y velocidad del motor desde un estado de reposo hasta su máxima velocidad, se obtiene con respecto al tiempo la respuesta del motor en velocidad y corriente, por lo que a cada instante de tiempo se puede conocer su velocidad y su corriente, además se conoce el (Voltaje aplicado) que se le aplica al motor, tomando en cuenta que estos motores usan magnetos permanentes la φ se puede considerar constante y una constante multiplicada por otra constante nos da una constante, entonces φ será una constante propia de cada tipo motor, la única variable que faltaría conocer es para poder calcular φ .
Tomando en cuenta la ley de Ohm
=
$( )
)
( = −
Si se logra detener el motor para que no genere un voltaje $ =0, por lo que sí se
conoce el voltaje aplicado y se mide la corriente que circula se puede calcular .
Con esto se conocen todas las variables para calcular φ
Ahora se puede relacionar la corriente con el Torque.
Recordando
) ( )
( = φ
y
) (
) (
ω φ = −
Al multiplicar se tienen volts, por lo que las unidades de φ son
% & $ &*
Al sustituir φ de ecuación 2.8 en ecuación 2.3 se obtiene:
) ( ) ) (
) ( (
) (
ω
− =
donde.
=) :
=# 1
ω=) @
Al multiplicar φ* las unidades resultantes son:
& $ ' % &* *
es una expresión y se puede eliminar. Si sabemos que:
& $ & $
' %
&* * = *
( & $ 1 *
1 =
( 1
1 =
Son unidades que se manejan para medir el torque en un motor de corriente directa.
.
-De la ecuación 2.8 y la ecuación 2.3
φ ) ( ) ( = − ) ( ) ( = φ
Se puede relacionar la corriente en función del Torque y φ
Despejando de ecuación 2.3 se obtiene.
φ
) ( ) ( =
Y ahora substituyendo esta ecuación en 2.8 obtenemos.
Con esta información se puede correlacionar ambas características, es decir se puede correlacionar la velocidad y la corriente en función del Torque.
De la ecuación 2.5
$( )
)
( = −
Con este método de prueba se puede conocer la corriente de Stall que es la misma corriente de arranque del motor, en la condición de Stall o justo en el instante en que arranca el motor, el motor no gira, es decir no hay voltaje generado por lo que:
=
Y se conoce el voltaje aplicado por lo que automáticamente se puede calcular .
Recordando que
φ ω( )= − ( )
ya se puede conocer por el método anteriormente explicado, se conoce ya que se sabe que voltaje se le esta aplicando al motor.
%
-
"
%
! +
9 8
-
"
Se anexa un diagrama eléctrico del equipo que se utiliza para llevar a cabo estas mediciones:
$ 6 4 ; 4 < .
Descripción del diagrama de Figura 23.
: / 0 " ; " . Es el motor al que se desea medir su desempeño, es un motor
eléctrico de corriente directa de magnetos permanentes para aplicaciones automotrices de entre 150 y 350 watts de potencia y un voltaje nominal de 13 VDC.
: / 0 8 7 . Es un conector eléctrico con terminales de cobre y cubierta de
: / 0 . & . Es una fuente de poder de corriente directa de 1064 watts de potencia que se alimenta con 120 VAC con voltaje de salida controlable entre 0 y 20 volts y corriente controlable entre 0 y 120 Amperes, precisión de programación de 0.035 % + 15 mv,ruido eléctrico máximo 8 mv rms y máximo 50 mv pico a pico, regulación de carga voltaje 3 mv y corriente 0.01% + 15 mA, regulación de línea 3 mv y 10 mA, tiempo de repuesta a transitorio 2 ms, resolución de programación 5 mv, corriente de AC de entrada 24 A a 120 VAC, , con energía suficiente para suministrar la potencia requerida por el motor bajo prueba (No. 1), esta fuente además debe tener algún medio de comunicación o control como GPIB o algún otro.
% : /%0 # Es un sensor de corriente del tipo shunt , con montaje de base,
con un rango de 0 a 150 A y 0 a 50 mv, con una exactitud del 0.25 %, coeficiente de temperatura de 0.002% por grado centígrado, elemento resistivo manganin, el cual convierte una señal de corriente de 150 amperes a una señal de voltaje de 50 mv, el voltaje medido en el sensor de corriente es directamente proporcional a la corriente que circula en el circuito en el rango de 0 a 150 Amperes .
' : /'0 < . Es un acondicionador de señal de entrada análoga de voltaje
aislada, ancho de banda de 10 khz, exactitud 0.05 %, protección de entrada a 240 volts rms, no linealidad +/H 0.02 %, compensación de entrada contra temperatura +/H 1 microvolt/grado centígrado, compensación de salida contra temperatura +/H 40 microvolts/grado centígrado, resistencia de salida 50 Ohms, voltaje de alimentación 5 volts de corriente directa, rango de temperatura de operación de H40 a 85 grados centígrados, que amplifica protege y filtra una señal de 0 a 50 mv para convertirla a una señal proporcional de 0 a 5 voltios a este acondicionador se conecta la señal del sensor de corriente (No. 4) para que la señal llegue apropiadamente a la tarjeta de adquisición de datos (No. 11) que a su vez esta conectada a la computadora (No. 6).
5 : /50 . Es una computadora con procesador Pentium 4 de 3 ghz, con 512 MB
de memoria RAM DDR2 de doble canal de 533 Mhz, disco duro de 160 GB Serial ATA II con velocidad de transferencia de 3 GB por segundo, tarjeta de video de 256 MB, chasis mini torre con 2 bahías internas de 3.5 pulgadas y dos bahías externas de 5.25 pulgadas, 2 ranuras PCI de altura completa, abastecimiento de energía 305 watts, interfase de red 10/100 ethernet, que sirve para procesar los datos provenientes de la tarjeta de adquisición de datos (No. 11), realizar los algoritmos de calculo de las variables necesarias para medir el desempeño y controlar la secuencia de prueba del aparato.
4 : /40 ; =& >. compatible con IEEE 488.2, rango de transferencia
2 : /20 " . Es un cable GPIB compatible con IEEE 488.2, blindado, que conecta a la tarjeta GPIB (7) con la fuente de poder ( 3).
3 : /30 ( $ . Es un relevador normalmente abierto tipo DPST (Double Pole
Single Throw, Polo Doble Interruptor Doble), con bobina de activación a 120 VAC y contactos para 50 A, contactos de aleación plataHcadmio, aislamiento inicial de resistencia de 100 megaohms, poder nominal de bobina de 9.8 VA, corriente nominal de bobina a 120 VAC de 85 mA, . que sirve para encender y apagar el motor bajo prueba (No. 1)
6 : / 60 ( Es un resistencia de carbón entre 100 y 200 Ohmios y entre ¼ y ½ watt
de potencia con un 10 % de tolerancia.
: / 0 ; - . Es una tarjeta de adquisición de datos de 16
entradas análogas en configuración simple, con convertidor análogo digital de aproximación sucesiva, 12 bits de resolución, máxima frecuencia de muestreo de 200,000 muestras por segundo, de rango bipolar de 20 volts +/H 10 volts a rango bipolar de 100 mv +/H 50 mv, acoplamiento DC.
: / 0 ; + . Es una tarjeta PCIH6503, de 24
entradas/salidas compatibles con TTL, rango de voltaje para nivel alto (1 lógico) de 2.2 a 5.3 volts dc, rango de voltaje para nivel bajo (0 lógico) de H0.3 a 0.8 volts dc, rango para salida digital alta (1 lógico) de 3.7 a 5 volts dc, rango de salida digital baja (0 lógico) 0 a 0.4 volts dc, tipo de interfase esclavo, requerimientos de poder de 400 mA a 5 VDC.
: / 0 > " $ $ Es una bobina de activación a 120 VAC, 290
ohms de resistencia, corriente 85 mA.
% : / %0 " 7 " . Es un cable de cobre blindado calibre 22 de conexión
entre la tarjeta de adquisición de datos (No. 11) y el acondicionador de señal (No. 5).
' : / '0 " 8 . Es un cable de conexión entre la tarjeta de entradas salidas
%
(
8
Se desarrollo un programa que controla la fuente de poder, el encendido apagado del motor y la adquisición de datos.
Los datos de adquisición se escalaron a unidades físicas representativas del
experimento y se grabaron en una hoja Excel, se procedió al análisis de las señales utilizando Excel y tomando como referencia las ecuaciones que se presentan en esta Tesis.
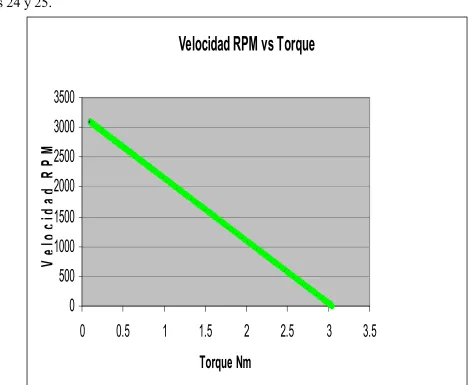
Ejemplo con mediciones y resultados.
A continuación se presentan las graficas obtenidas después de dicho análisis en las figuras 24 y 25.
0
500
1000
1500
2000
2500
3000
3500
0
0.5
1
1.5
2
2.5
3
3.5
[image:60.612.81.551.264.649.2]0
10
20
30
40
50
60
70
80
90
0
0.5
1
1.5
2
2.5
3
3.5
! # ) 8
En la tabla 1 en la columna tiempo esta el tiempo de muestreo de adquisición, para este experimento se utilizo una velocidad de 20,000 datos por segundo para cada canal.
Como información se tiene: