INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
UNIDAD ZACATENCO
Diseño y C
onstrucción de un Sistema de
Adquisición de Datos Multicanal con Conectividad
USB
TESIS
Que para obtener el título de:
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
PRESENTA:
Edgar Eleazar Chávez Rosas
DIRECTOR DE TESIS:
Dr. Raúl Peña Rivero
3
INTRODUCCIÓN TEÓRICA
ANTECEDENTES DE LA INSTRUMENTACIÓN
Desde que el ser humano tuvo la necesidad de crear patrones de comparación para cuantificar sus bienes ó tomar referencia para hacer sus construcciones, se considera el nacimiento de la metrología ya que se establecieron los patrones de medición que permiten generalizar las comparaciones. Paralelamente se da origen a la instrumentación que es la aplicación de conocimientos científicos que son utilizados para desarrollar aparatos de medición que cumplan con los patrones establecidos.
Existen diferentes tipos de instrumentación como la mecánica, la electrónica, la industrial, etc. y cada una ha tenido su apogeo en diferentes épocas.
La instrumentación además de ser desarrollada por la tecnología, también ha sido pilar para el avance de la misma.
Así como la instrumentación mecánica, la instrumentación electrónica ha tenido muchas evoluciones. En un principio los sistemas de medición eléctricos eran difíciles de transportar, además de que se requería de una especialización para configurarlos e interpretar los resultados. Como consecuencia de ello, un grupo reducido de usuarios contaban con la posibilidad y capacidad para emplearlos.
Con el paso de los años, gracias a la consolidación de la instrumentación electrónica, el diseño fue enfocado a la simplificación del uso, mayor precisión, portabilidad, ofrecer control y además comunicación con sistemas computacionales.
4
caso relacionarlas con factores como el tiempo, las condiciones climáticas o la interacción con otros fenómenos físicos.
5
PRÓLOGO
En el presente trabajo de tesis se expone el diseño y la construcción de un sistema de adquisición de datos multicanal, que se desarrolla con base en la necesidad de una tarjeta que permita tomar lecturas en campo, que sea flexible para el uso en cualquier equipo de cómputo y que pueda almacenar información para posteriormente procesarla.
Este sistema cuenta con una interface de comunicación USB, con un programa de control de fácil manejo, que despliega la información de manera gráfica y numérica, además de contar con la función de almacenar las lecturas para un posterior análisis en cualquier programa matemático.
La adquisición de datos es un proceso que se compone de al menos cinco pasos, la interpretación del fenómeno físico, acondicionamiento de la señal, procesamiento digital de la señal, interface de comunicación y el procesamiento de la información. Durante el desarrollo del trabajo se explica cada uno de ellos y se plantea la mejor solución para el diseño en base a las necesidades reflejadas en los objetivos.
Una vez diseñado y construido el trabajo, se realizaron pruebas de funcionamiento donde se corroboró que el sistema marchara correctamente, además de establecer los alcances del mismo y de esta manera se demuestra que este sistema es de utilidad y posee la flexibilidad necesaria para que pueda ser utilizado en un amplio campo de mediciones.
6
OBJETIVO GENERAL
Diseñar y construir un sistema de adquisición de datos multicanal que pueda comunicar y transmitir la información adquirida a una computadora de escritorio o portátil a través de una Interface USB, y en la cual se almacene y procese la información.
OBJETIVOS PARTICULARES
El sistema podrá conectarse y trabajar en cualquier equipo de cómputo donde sea posible instalar el controlador de la tarjeta de adquisición de datos y el software para su manipulación y el procesamiento de datos.
La tarjeta de adquisición de datos contará con:
8 entradas de sensores que representen la medida en tensión eléctrica y cuyo intervalo sea acondicionado de 0 a 5 volts.
Conexión USB 2.0.
Luz indicadora del estado de la tarjeta.
Una fácil conexión y desconexión de sensores.
Botón para el restablecimiento.
El software para la manipulación de la tarjeta y procesamiento de datos deberá tener las siguientes características:
Interface gráfica de fácil manejo.
7
Generar un documento con los datos adquiridos de las mediciones.
Mostrar gráficas de los datos obtenidos.
8
JUSTIFICACIÓN
Para realizar una medición a un fenómeno físico no basta con colocar un instrumento de medición y tomar una lectura, lo correcto es colocar el instrumento de medición y realizar una serie de lecturas que ayuden a comprender el fenómeno.
Por ejemplo, para realizar la medida de tensión eléctrica en un tomacorriente se puede colocar un voltímetro y realizar una lectura de la tensión, pero esto no basta, porque si se mide la tensión tiempo después, es muy probable que ésta sea diferente a la primera. Y es que todos sabemos que en el tomacorriente debería de medirse 127 Vrms, pero debido a diferentes factores como la sobrecarga esta puede variar.
Otro caso que ejemplifica la importancia de realizar diversas lecturas en una medición, es la medición de temperatura en una habitación. Si se quisiera tomar la temperatura real de una habitación se necesitaría un instrumento de medición que pudiera captar la variación de temperatura en diversas partes de la habitación, ya que la temperatura puede ser diferente arriba, abajo o en áreas donde intervengan otros factores físicos como la humedad.
Además de requerir una serie de lecturas para una buena medición, también es indispensable que éstas sean periódicas y dependiendo del fenómeno a medir es la frecuencia requerida para las lecturas.
9
En la actualidad, hay diversas firmas que poseen sus propios diseños de sistemas de adquisición, estos están compuestos por una tarjeta, una interface de comunicación y una computadora, en ésta se encuentra instalado un software que requiere recursos abundantes en la computadora, además de tener un alto costo y poseer interfaces de comunicación, en muchos casos exclusivos para equipos de cómputo de escritorio dejando de lado los equipos portátiles.
PLANTEAMIENTO DEL PROBLEMA
Las tarjetas que existen en el mercado ocupan exclusivamente programas de simulación o de instrumentación virtual, sin la posibilidad de utilizar algún otro programa de control. Al usuario le resulta complicado utilizar equipo de cómputo distinto al propio o en el cual no esté instalado todo el paquete del simulador virtual.
Este problema se puede presentar con mayor facilidad cuando el usuario quiera realizar mediciones de campo y la computadora disponible para las mediciones no tenga cargado todo el programa de control.
10
ORGANIZACIÓN DEL TRABAJO DE TESIS
Este trabajo de tesis se encuentra organizado de la siguiente manera:
En el capítulo 1 se define la adquisición de datos, se plantea la justificación de este trabajo de tesis y se puntualiza el objetivo general y el objetivo particular.
En el capítulo 2 se explica a detalle cada parte del proceso de la adquisición de datos con el objeto de aclarar la asignación de roles para cada parte del proceso ya que es importante dejar en claro las actividades de cada sección para definir las características del sistema y posteriormente definir el diseño.
Dentro del mismo capítulo en la sección de interface de comunicación se describen las características de algunas interfaces y se justifica el uso de la comunicación mediante USB.
En el capítulo 3 capítulo se proyectan los objetivos particulares en características técnicas, de la tarjeta de adquisición de datos, el programa para la tarjeta y el programa de control del sistema.
En el capítulo 4, el diseño, se plantea el camino que se tomó para desarrollar las diferentes partes que componen el sistema, como la implementación del modulo USB, la construcción de la tarjeta, los diagramas de flujo que describen el programa de control y el que se ejecuta en el microcontrolador.
11
CONTENIDO
I t odu ió teó i a……… 3
P ólogo……….. 5
O jeti o ge e al………. 6
O jeti os pa ti ula es……….. 6
Justifi a ió ………. 8
Pla tea ie to del p o le a………. 9
O ga iza ió del t a ajo de tesis………10
Índice de Figu as……… 14
Í di e de Diag a as de flujo…..………. 16
“iglas A e ia io es..………. 17
Capítulo 1. FUNDAMENTOS DE LA ADQUISICIÓN DE DATO“…………..………... 19
Capítulo 2. ELEMENTO“ DE LA ADQUI“ICIÓN DE DATO“………. 21
2.1 “e so es t a sdu to es I te p eta ió del fe ó e o físi o ……….. 22
2.2 A o di io a ie to de señal………. 23
2.3 I po ta ia del a o di io a ie to de señal……… 23
2.4 Co e sió de la señal……… 27
2.4.1 Convertidor analógico-digital……….……… 27
2.4.2 ‘esolu ió ……… 28
2.5 I te fa e de o u i a ió ……….. 28
2.5.1 Interface de RS- ……….. 28
2.5.2 I te fa e PCI……….. 29
2.5.3 I te fa e U“B………. 29
2.5.4 I te fa e ethe et………. 30
2.5.5 Ele ió de i te fa e pa a la o u i a ió del siste a……… 31
2.6 Al a e a ie to de datos despliegue de i fo a ió ……… 32
Capítulo 3. REQUISITOS DE DI“EÑO………. 33
3.1 ‘e uisitos de diseño e ge e al del siste a……….. 33
12
3.3 Ca a te ísti as pa a el diseño ele t ó i o………. 35
3.3.1 Ta jeta de ad uisi ió ………. 35
3.3.2 Requisitos para convertidor analógico-digital A/D ……… 35
3.3.3 “e so es……… 36
3.3.4 I te fa e U“B………. 36
3.4 Ca a te ísti as pa a el diseño del p og a a……….37
Capítulo 4. DI“EÑO DEL “I“TEMA……….. 39
4.1 “ele ió de i o o t olado ………..39
4.2 Diseño de la TAD………. 41
4.2.1 “ele ió de pue tos……… 41
4.2.2 Material necesario para la implementación del modulo USB en el PIC F ………. 42
4.2.3 Diagrama de la TAD……… 43
4.2.4 Defi i ió de la i fo a ió de ide tifi a ió de la TAD……….. 44
4.2.5 Implementación del convertidor analógico-digital………..45
4.2.6 Diag a a de flujo del algo it o ue ige la TAD……….. 46
4.2.7 Co st u ió de la TAD……….. 50
4.2.7.1 Mate ial………. 50
4.2.7.2 Diseño del PCB………. 51
4.3 Co t olado de la TAD……… 52
4.4 Diseño del p og a a de o t ol……….. 53
Capítulo 5. P‘UEBA“ DE FUNCIONAMIENTO Y ANÁLI“I“ DE ‘E“ULTADO“………. 59
5.1 P ue as de la o ato ios………. 59
5.1.2 Mate ial………..59
5.1.3 P o edi ie to esultados………. 60
5.1.3.1 P i e a p ue a……… 61
5.1.3.2 “egu da p ue a……….. 63
5.2 Prueba utiliza do u se so de te pe atu a……….……… 71
5.2.1 Mate ial utilizado……….71
5.2.2 P o edi ie to esultados………. 72
5.2.3 Te e a p ue a………. 72
Capítulo 6. CONCLU“IONE“……… 76
6.1 Co lusio es……….. 76
6.2 T a ajos futu os……….. 78
13
ANEXO A Co u i a ió po el Bus “e ial U i e sal………. 80
1A.1 I t odu ió a la i te fa e U“B………. 80
1A.2 Espe ifi a io es té i as de la U“B……… 80
1A.3 Comunicación host-endpoint……….. 82
1A.3.1 Defi i ió de té i os o u es e la o u i a ió U“B……… 82
1A.3.2 Ide tifi a ió de dispositi os………. 83
1A.3.3 Asignación de direcciones a los endpints……….. 83
1A.3.4 Pa uetes……….. 84
1A.3.5 Tipo de t a s isió de datos………. 85
1A.3.6 Des ip ió ………. 86
1A.3.7 P o eso de e u e a ió ……… 87
ANEXO B MANUAL DE U“UA‘IO………. 89
1B Ca a te ísti as del siste a……… 90
2B Ha d a e del siste a………..…….………. 92
2B.1 Des ip ió detallada………. 93
3B Software de o t ol del siste a………. 93
3B.1 Des ip ió detallada………. 95
4B I stala ió del siste a……….. 97
4B.1 Instalación manual del o t olado ………. 97
4.2 I stala ió a ual del p og a a de o t ol………. 100
14
[image:14.612.81.530.169.723.2]ÍNDICE DE FIGURAS
Figura 2.1 Diag a a a lo ues del p o eso de ad uisi ió de datos………. 21
Figura 2.2 G áfi a del o po ta ie to del te isto ……….. 24
Figura 2.3 Circuito linealización termistor, por puente de Wheatstone con R paralela 24 Figura 2.4 Co po ta ie to de los dife e tes tipos de te opa es……….. 25
Figura 2.5 Diag a a de apli a ió del se so LM ……….. 26
Figura 3.1 Diag a a de flujo de u siste a de ad uisi ió de datos……… 34
Figura 4.1 Dist i u ió de las te i a ió e el PIC F ………. 41
Figura 4.2 Ruta a seguir para que el oscilador primario, un cristal de 12MHz, opera a MHz……….. 42
Figura 4.3 Conexión del capacitor de desacoplamiento y del capacitor para el egulado ………. 43
Figura 4.4 Diagrama eléctrico de la TAD, realizado en el programa ISIS de Proteus 7……….. 44
Figura 4.5 Representación gráfica del vector por el cual se envía la información mediante el ulk tra sfer……….………. 46
Figura 4.6 I age D de la TAD………..………..51
Figura 4.7 Imagen del layoutde la TAD……… 51
Figura 4.8 Fotog afía de la TAD u a ez a ada……….. 52
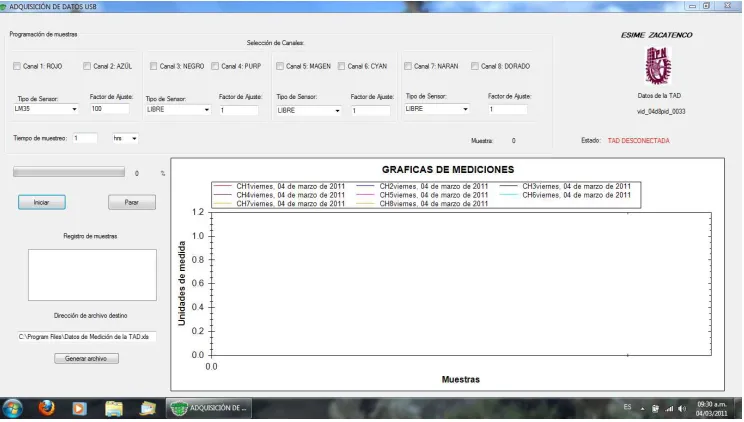
Figura 4.9 Interface gráfica que o t ola la TAD….………. 58
Figura 5.1 Diag a a elé t i o de la p ue a de la o ato io……….. 60
Figura 5.2 “iste as de p ue a e la o ato io……… 61
Figura 5.3 Medición con el osciloscopio de la señal se oidal……….. 61
Figura 5.4 “eñal o te ida e la TAD………..……….62
Figura 5.5 Forma de onda y oscilograma de una señal senoidal de 3 Hz obtenida con la TAD……… 64
Figura 5.6 Forma de onda u oscilograma de una señal senoidal de 3 Hz obtenida usando u os ilos opio……… 64
Figura 5.7 Medición hecha con el sistema de adquisición a una señal senoidal de Hz………. 65
Figura 5.8 Medición hecha con el osciloscopio a una señal senoidal de Hz………. 66
15
[image:15.612.85.526.89.679.2]. Hz……….. 67
Figura 5.11 Medición hecha con el sistema de adquisición a una señal triangular de Hz………. 68
Figura 5.12 Medición hecha con el osciloscopio a una señal triangular de Hz……… 69
Figura 5. 134Medición hecha con el sistema de adquisición a una señal cuadrada de Hz………. 69
Figura 5.14 Medi ió he ha o el os ilos opio a u a señal uad ada de Hz ...………… 70
Figura 5.15 Medición hecha con el sistema de adquisición a una señal cuadrada de Hz……… 71
Figura 5.16 Medi ió he ha o el os ilos opio a u a señal uad ada de Hz……… 71
Figura 5.17 Conexiones del sistema y del termómetro digital para realizar las pruebas de edi ió de te pe atu a………..………….. 72
Figura 5.18 Muest a los dos se so es listos pa a ealiza la edi ió ……… 73
Figura 5.19 Medi ió de te pe atu a, e ié i t odu idos los se so es………. 74
Figura 5.20 Medición de temperatura realizada con el SAD, haciendo uso de un sensor LM ……….. 74
Figura 5.21 Medi io es de te pe atu a……….. 75
Figura A1 Di e sio es de los o e to es U“B………. 82
Figura A2 Ejemplo de codificación de datos en N‘)I……… 83
Figura B1 Pa tes de la TAD………. 93
Figura B2 Est u tu a de la e ta a del p og a a de o t ol………. 95
Figura B3 Ve ta a ad i ist ado de dispositi os……….. 99
Figura B4 Ve ta a p opiedades de la TAD……….. 99
Figura B5 Ve ta a a tualiza soft a e de o t ol TAD………. 100
Figura B6 ‘uta del o t olado ……… 100
Figura B7 Ventana de ale ta……….. 101
Figura B8 Co fi a ió de i stala ió del o t olado ………. 101
Figura B9 C ea a eso di e to del p og a a de o t ol TAD U“B……… 102
Figura B10 Conexión del se so ………. 103
Figura B11 “ele ió de a al………. 103
Figura B12 “ele ió de se so ……….. 104
Figura B13 “ele ió de fa to de ajuste……….. 104
Figura B14 “ele ió de tie po de uest eo………. 105
Figura B15 Muest eo e p o eso……….. 105
Figura B16 Botó pa a ge e a a hi os………. 106
16
ÍNDICE DE DIAGRAMAS DE FLUJO
Figura 2.1 Diag a a a lo ues del p o eso de ad uisi ió de datos………. 21
Diagrama 3.1 Diag a a de flujo de u siste a de ad uisi ió de datos……….. 33
Diagrama 4.1 Diagrama de flujo de declaración de variables y funciones en el programa del µC……… 47
Diagrama 4.2 Diagrama de flujo del programa principal en el µC……….……… 48
Diagrama 4.3 Estructura de la función recibir desde PC……….. 49
Diagrama 4.4 Estructura de las funciones canal X:ANY la cual envía la información del a al X a la o putado a……….. 49
Diagrama 4.5 Declaración de funciones de cabecera y variables del programa de o t ol………. 53
Diagrama 4.6 Diag a a de flujo del p og a a p i ipal……… 54
Diagrama 4.7 Fu ió i i ia ……… 55
Diagrama 4.8 Función selección de tie po……….. 55
Diagrama 4.9 Fu ió sele ió de se so ……… 56
Diagrama 4.10 Función timer ……… 56
Diagrama 4.11 Fu ió o u i a ió ………. 57
Diagrama 4.12 Fu ió pa a ………. 57
17
SIGLAS Y ABREVIACIONES
µC Microcontrolador
µF Microfaradio
A/D Analógico-digital
ADC Analogic-digital converter (convertidor analógico digital)
AN Analógico(a)
ANX E t ada a alógi a X
ANY E t ada a alógi a Y
D.F. Diagrama de Flujo
EEPROM Electrically Erasable Programable Read-only Memory (Memoria de solo lectura programable eléctricamente borrable )
ETHERNET Estándar de redes de computadora
HID Human Interface Divice (Dispositivo de Interface Humana)
Hz Hertz, unidad de media de la frecuencia
Layout Diseño
LED Light-Emitting Dido (Diodo Emisor de Luz)
mA Miliampere
MBps Mega Bytes por segundo
Mbps Mega bits por segundo
NA Normalmente abierto(a)
P.P. Programa Principal
PC Personal Computer (Computadora Personal)
PCB Printed Circuit Board (Tarjeta de Circuito Impreso)
PCI Peripherial Component Interconnect (Interconexión de Componentes
Perifericos)
pF Picofaradios
PIC Programmable Intergrated Circuit (circuito integrado programable)
PID Pruduct ID (Identificación del Producto)
PLL Refiere a la función del los fuses para ajuste del reloj principal
PLLX Refiere a la función del los fuses para ajuste del reloj principal con el divisor X
RAM Random Acess Memory (memoria de acceso alterno)
Reset Restablecer
ROM Read Only Memory (memoria de solo lectura)
RS-232 Recommended Standard 232 (Estándar Recomendado 232)
SAD Sistema de Adquisición de Datos
18
USB Universal Serial Bus (Bus Serial Universal)
VID Vendor ID (Identificación del Vendedor)
Vpp Volts pico-pico
19
CAPÍTULO 1
FUNDAMENTOS DE LA ADQUISICIÓN DE DATOS
La adquisición de datos se define como la toma de mediciones mediante un instrumento que permita recopilar muestras, almacenar y procesar la información, y tiene su desarrollo en la electrónica y en la computación en hardware y software. En hardware se incorpora la captación, el acondicionamiento de la señal e interface de comunicación con la computadora. En el software se incorpora la programación de la interface desde la tarjeta de adquisición y la computadora, el procesamiento y el despliegue de información, además de la coordinación del sistema.
Entonces la adquisición de datos se conforma por un sistema que permite realizar la medición de un fenómeno mediante una tarjeta que toma lecturas y las comunica a la computadora donde se procesa, almacena y muestra la información.
El proceso de la adquisición de datos es el siguiente:
1. La interpretación del fenómeno físico.
En esta parte se hace uso de un sensor que transforma un parámetro del mundo exterior (temperatura, presión, sonido, etc.) en parámetros eléctricos ya sea corriente o voltaje.
2. Acondicionamiento de señal.
20
3. Procesamiento digital de la señal.
Parte fundamental en la adquisición de datos, consiste en convertir la señal analógica proveniente del fenómeno físico a medir en cierto número de valores binarios. Se considera la resolución del convertidor analógico digital y la velocidad de muestreo.
4. Interface de comunicación tarjeta-computadora.
La interface se utiliza para transportar la información de la medición de manera digital a la computadora. Existen diferentes maneras de realizar la comunicación entre dispositivos electrónicos y la computadora, tales como puerto paralelo, puerto serial, PCI, ETHERNET, USB, etc., cada uno tiene diferentes ventajas por las cuales es utilizado.
5. Procesamiento de la información.
21
CAPÍTULO 2
ELEMENTOS DE LA ADQUISICIÓN DE DATOS
[image:21.612.146.468.381.509.2]Como se mencionó en el capítulo anterior, el proceso de la adquisición de datos tiene al menos cinco etapas. Cada una de estas etapas implica una interrelación con las demás, es decir cada una debe de estar acoplada con la etapa anterior y la posterior. En este capítulo se describe el funcionamiento de cada elemento.
Figura 2.1 DIAGRAMA A BLOQUES DEL PROCESO DE ADQUISICIÓN DE DATOS
22
2.1 SENSORES Y TRANSDUCTORES (INTERPRETACIÓN DEL FENÓMENO
FÍSICO)
Se denomina transductor a un elemento o dispositivo que convierte una señal en una forma física a otra, donde la señal a la salida de un transductor es proporcional en magnitud a la de entrada.
Dado que hay seis tipos de señales: mecánicas, térmicas, eléctricas, ópticas y moleculares (químicas), entonces cualquier dispositivo que convierta una de estas señales en cualquiera de las cinco restantes es considerado un transductor.
Para los fines de la instrumentación electrónica los transductores que se utilizan son los que transforman la señal de entrada en señal eléctrica. El uso de estos transductores presenta los siguientes beneficios:
1. Existen en la actualidad una amplia gama de transductores comerciales que hacen sencilla su implementación. O si así se desea se pueden construir sensores para tareas especificas esto gracias al estudio de la física y las disciplinas electromagnética, electrónica, mecánica, etc.
2. Una vez que se obtiene la señal eléctrica se puede amplificar si es que esta es muy pequeña, es decir se puede acondicionar la señal mediante electrónica para su posterior análisis, incluso hay transductores comerciales que ya cuentan con esta etapa integrada.
23
con condiciones de atmósfera volátil, se acude a sistemas neumáticos o hidráulicos.
Es importante destacar que para cada tipo de señal podemos encontrar diferentes tipos de sensores con campos de acción específicos. Es tarea del usuario del sistema de adquisición de datos encontrar el sensor adecuado y acondicionarlo para el área donde se desea implementar.
2.2 ACONDICIONAMIENTO DE LA SEÑAL
Los acondicionadores de señal son los elementos del sistema que reciben la señal de salida del sensor y proveen un nivel o amplitud de señal apta para permitir un procesamiento posterior. Consiste normalmente en equipos electrónicos que ofrecen entre otras funciones amplificación o atenuación, filtrado, acoplamiento de impedancias y modulación o demodulación.
2.3 IMPORTANCIA DEL ACONDICIONAMIENTO DE LA SEÑAL
Si se quisiera medir temperatura se tienen diferentes sensores a los cuales se pueden acudir por ejemplo termistor, termopar, sensor semiconductor LM35.
Los tres mencionados se pueden utilizar como sensores de temperatura pero cada uno trabaja de manera diferente.
Primer caso termistor
24
[image:24.612.235.409.208.355.2]al aumentar la temperatura se dice que es de coeficiente negativo (NTC). Con este sensor se pueden tomar medidas de 0 a 100º C. Pero esto no es todo, además la variación de la resistencia del termistor no es lineal, así que se tiene que acudir a un método de linealización del termistor o acudir a la interpretación matemática de Stenhart-Hart para termistores.
Figura 2.2 Gráfica del comportamiento del termistor
Existen diferentes maneras de linealizar el termistor, algunas de ellas son mediantes diferentes topologías del puente de Wheatstone, la desventaja de estés es que se pierde precisión en la medición y la linealidad es por pocos grados centígrados.
Debido a que la temperatura es interpretada como resistencia en el termistor se utiliza un puente de Wheatstone para convertir las variaciones de resistencia en variaciones de tensión. Para linealizar el efecto del termistor se puede aplicar el método de resistencia paralela con respecto al sensor.
Figura 2.3 Circuito linealización del termistor, por puente de Wheatstone con R paralela
[image:24.612.249.404.565.663.2]25
Para el método matemático se puede hacer uso de un micro controlador, que evalúe el valor de resistencia del termistor en la ecuación de Stenhart-Hart para termistores, ecuación 2.1, esta requiere de solo tres mediciones de resistencia con sus respectivos valores de temperatura conocidos para que se pueda aplicar, es decir no hay que caracterizar por completo al termistor.
273 )
)) (ln( )
(ln(
( 3 1
A B R C R T
2.1
Segundo caso termopar
El termopar es un dispositivo compuesto por la unión de dos metales diferentes que produce una tensión al someterse al calor. Se utiliza en la instrumentación, para procesos industriales, los termistores comerciales tienen conectores estándar y son capaces de medir un amplio intervalo de temperatura.
[image:25.612.154.493.464.649.2]Existen diferentes tipos de termistores por ejemplo los tipo K, con un intervalo de -200° C hasta 1° C; el tipo J con un intervalo de -40° C a 750° C; tipo N superior a los 300° C.
Figura 2.4 Comportamiento de los diferentes tipos de termopares.
26
Gracias a la linealidad aparente de los termopares, su acondicionamiento de señal se lleva a cabo fundamentalmente mediante el empleo de un amplificador de instrumentación con una ganancia modo diferencial grande que permite amplificar la señal de interés y una ganancia en modo común pequeña que elimina el ruido de la señal, obteniendo a la salida una señal de medición óptima para su procesamiento.
Tercer caso sensor semiconductor
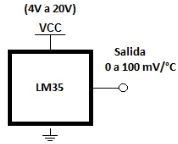
El sensor de temperatura LM35, es un circuito integrado de precisión que permite tomar medidas di e tas de te pe atu a da do u a salida e voltaje, es completamente lineal con una sensibilidad de 10mV/ ºC.
[image:26.612.284.373.415.487.2]Dependiendo de la configuración a la que se someta puede tener un intervalo de temperatura de -55° C a 150°C, utilizando dos fuentes y con una sola fuente se puede medir desde 2ºC hasta 150 ºC, y se puede alimentar con una tensión de 0.2V hasta los 35V.
Figura 2.5 DIAGRAMA DE APLICACIÓN DEL SENSOR LM35
El acondicionamiento de la señal en el caso de utilizar un sensor de este tipo y haciendo uso de un microcontrolador, se puede llevar a cabo multiplicando por 100 el valor que dé a su salida el transductor.
27
Primero:
Que aunque haya varios sensores que midan la misma variable, sus campos de aplicación son diferentes, pues cada uno tiene características de intervalo de temperatura y sensibilidad que los distinguen de los demás.
Segundo:
El tratamiento de la señal de salida del transductor en cada caso es distinto ya que también cada uno proporciona una señal a la salida diferente en tipo y en magnitud.
2.4 CONVERSIÓN DE LA SEÑAL
La conversión de señal como su nombre lo dice consiste en transformar la señal que detecta el sensor que es una señal analógica a una señal digital. Cuando se miden magnitudes eléctricas, por ejemplo intensidad de corriente, o bien magnitudes no eléctricas como la temperatura, se obtienen a menudo el valor medido en forma analógica. Pero para poder transmitir, almacenar o tratar datos obtenidos en la medición, estos datos se requieren en forma digital. Para ello se necesita un convertidor analógico-digital.
2.4.1 CONVERTIDOR ANALÓGICO-DIGITAL
28
2.4.2 RESOLUCIÓN
En general el convertidor analógico digital establece una relación entre su entrada (señal analógica) y su salida (digital) dependiendo de su resolución. Esta resolución se determina relacionando el valor máximo que se permite a la entrada, también conocida como la tensión de referencia, y la cantidad de bits del convertidor utilizado.
2.5 INTERFACE DE COMUNICACIÓN
La comunicación en el sistema es esencial ya que es la parte que transmite la información de la tarjeta a la computadora. Para realizar la transmisión hay diversas formas de hacerlo, utilizando la interface RS-232, ethernet, PCI, USB, etc.
A continuación se presenta una descripción general de algunas interfaces de comunicación y posteriormente se enuncian los criterios de elección de la forma de trasmisión más adecuada. Es importante mencionar que el sistema que se utilice debe funcionar apropiadamente en un sistema operativo de uso común.
2.5.1 INTERFACE RS-232
La interface RS-232 está constituido por un cable de 25 conductores con un conector compatible con DB25. La capacitancia de carga de terminal en este cable se especifica como 2500pF. La impedancia en el extremo del cable debe ser de 3000 a 7000Ω, y la impedancia de salida se especifica como mayor de 300Ω. Con estas especificaciones eléctricas, y para una frecuencia máxima de bits de 20 Kbps, la longitud máxima de la interface es de 30m.
29
Ventajas: La transmisión de información es muy segura, gracias a su sistema de corrección de errores, además permite la conexión con los equipos terminales a una distancia de hasta 30m.
Desventajas: Es una interface de comunicación lenta, solo permite la comunicación punto a punto y está en desuso.
2.5.2 INTERFACE PCI
PCI (Perripherial Component Interconnect) es una interface que permite conectar dispositivos directos a la tarjeta madre de la computadora, sus principales características son: la máxima tasa de transferencia es de 132Mbps, no requiere del sistema DMA, es decir tiene acceso directo a memoria, el protocolo de transferencia esta optimizado para trasmitir datos en forma de bloques, se pueden conectar hasta 256 dispositivos, la interface PCI es plug and play es decir se conecta con el equipo apagado, al encender el equipo la nueva tarjeta es reconocida por el BIOS de la PC y una vez iniciado se puede comenzar a trabajar con el software correspondiente.
Ventajas: Permite conectar una gran cantidad de dispositivos, es una interface plug
and play y además es una interface rápida gracias a que accesa directamente a memoria
sin necesidad de pasar por el CPU.
Desventaja: No es una interface que se caracterice por su portabilidad, ya que está destinada en su mayoría a tarjetas madre de computadoras de escritorio.
2.5.3 INTERFACE USB
30
Está compuesto por 4 conductores, uno de Vcc (5V), uno de tierra y dos de comunicación. La longitud máxima antes de requerir un repetidor es de 5m, su impedancia característica es de 90Ω, puede t a s iti a t es elo idades dife e tes, depe die do de la configuración de los dispositivos, las velocidades son baja velocidad (1.2Mbps), velocidad completa (12Mbps) y alta velocidad (480Mbps).
Es una conexión plug and play, es decir se puede conectar los dispositivos que cuenten con esta interface a la PC y hacer uso inmediato del dispositivo, una vez ya instalados los controladores.
Ventajas: Es una interface con velocidad de trasferencia adaptable según la aplicación, además de que en modo de alta velocidad la transferencia es rápida; la interface tipo plug
and play, provee de energía a los dispositivos terminales y está presente en todos los
equipos de computo de la actualidad.
Desventaja: Está limitado a una extensión de solo 5m como máximo.
2.5.4 INTERFACE ETHERNET
Ethernet es un estándar que se utiliza para la conexión de computadoras de área local LAN, es decir ethernet define el protocolo de cableado y la señalización de nivel físico. Esta interface se compone de: tarjeta de red, repetidores, puentes, conmutadores, etc.
Se compone de 8 conductores en par trenzado, su capacidad de transferencia es de hasta 100Mbps, utiliza cable UTP CAT 5, con una longitud máxima de 100m; antes de hacer uso de repetidores, la comunicación puede ser half-duplex o full-dúplex.
Ventaja: Permite una extensión de hasta 100m, es compatible con la mayoría de los equipos de computo de la actualidad.
31
2.5.5 ELECCIÓN DE INTERFACE PARA LA COMUNICACIÓN DEL SISTEMA
Para seleccionar el tipo de interface para el sistema se consideraron características, ventajas y desventajas propias de cada interface y se compararon con las características que se requieren en los objetivos de este proyecto, que en esencia son dos:
Se requiere de una interface que esté presente en la mayoría de los equipos portátiles.
Las interfaces antes mencionadas tienen presencia en cualquier equipo de cómputo de tipo escritorio, pero no así en los equipos portátiles de la actualidad. En el caso de RS- 232, no está presente de manera directa pero se puede aplicar un adaptación mediante la interface USB; en el caso de PCI, definitivamente no está presente este tipo de interface; para el caso de USB, la mayoría de los equipos de computo tienen en promedio 3 puertos de este tipo; en el caso de ethernet todas las computadoras tipo LAP-TOP, cuentan con este, en el caso de las computadoras tipo tablets o tabletas ya no cuentan con dicho puerto.
Se requiere que cuente con una tasa de transferencia considerable para realizar las mediciones.
Para el caso de RS-232 es de 20Kbps; para PCI es de 132MBps; En el caso de USB puede ser de 1.2 Mbps, 12Mbps y 480Mps; para ethernet es de 1000Mbps.
Estas dos características principales para el proyecto permiten ver que la opción más viable para la implementación de interface es la USB. Por su presencia en las computadoras y su mayor ancho de banda, además de características como proveer de energía eléctrica a los dispositivos y ser plug and play.
32
se desea conectar una sola tarjeta a la PC y se piensa que menos de 5 metros son suficientes para realizar las mediciones.
2.6 ALMACENAMIENTO DE DATOS Y DESPLIEGUE DE INFORMACIÓN
Los últimos pasos en la adquisición de datos son el despliegue y el almacenamiento de la información. Una vez que se tomó la lectura, lo que prosigue es desplegarla y/o almacenarla. El despliegue se puede hacer de manera numérica o mediante una gráfica.
Para realizar el almacenamiento existen diversas formas de hacerlo desde almacenar las mediciones en una memoria flash o en el disco de la computadora y aprovechar para procesar matemáticamente la información haciendo uso de alguna aplicación especializada.
33
CAPÍTULO 3
REQUISITOS DE DISEÑO
En este capítulo se plantean las condiciones de diseño que debe cumplir el sistema de adquisición de datos conforme a los objetivos planteados en el primer capítulo de este trabajo. Se busca interpretar las características de una forma técnica para posteriormente plantear la solución del sistema.
3.1
REQUISITOS DE DISEÑO EN GENERAL DEL SISTEMA
Para que el sistema presente la mayor funcionalidad posible deberá
contar con lo siguiente:
Permitir medir hasta 8 variables independientes.
Se puedan conectar diversos sensores, uno para cada entrada si es que así se requiere.
Que la tarjeta de adquisición de datos se comunique a una computadora mediante una interface USB.
Que el programa de control de la adquisición de datos sea amigable.
Que en la computadora se puedan visualizar en tiempo real las mediciones adquiridas.
34
3.2
DIAGRAMA A BLOQUES GENERAL DEL SISTEMA
Diagrama 3.1 Diagrama de flujo de un sistema de adquisición de datos
En el diagrama 3.1 se muestra el diagrama a bloques del sistema de adquisición; comienza con el sensor que convierte la señal física a medir en una señal eléctrica, continúa el acondicionamiento donde se adecua la señal para que pueda ser procesada por la tarjeta de adquisición. El siguiente bloque es el de la TAD, esta se encarga de trasformar la señal analógica en digital y transmitirla a la PC, cada vez que esta lo ordena mediante el programa de control. El último bloque en el sistema es el programa de control que se ejecuta desde la PC, en este, se configura el tiempo de muestreo, se despliegan las mediciones y además se almacena la información.
SENSOR Y ACONDICIONAMIENTO DE
SEÑAL TARJETA DE ADQUISICIÓN
35
3.3
CARACTERÍSTICAS PARA EL DISEÑO ELECTRÓNICO
En esta parte del trabajo se interpretan los requisitos reflejados en el apartado 3.1 ahora de manera técnica, para el caso de la tarjeta de adquisición, sensores, convertidor A/D e Interface USB.
3.3.1Tarjeta de Adquisición
Para realizar las acciones de una tarjeta de adquisición de datos, tales como tomar medidas en forma analógica, decodificar la información a digital y transmitirla a la PC, se requiere de un sistema basado en un controlador, el cual se pueda programar para controlar los diferentes módulos y así realizar las funciones de la adquisición.
Los módulos elementales que debe poseer este subsistema son los siguientes: CPU, memoria flash, memoria RAM, ROM, puertos, convertidor analógico-digital y el módulo de comunicación USB.
3.3.2 Requisitos para el convertidor analógico-digital (A/D)
36
Para fines del proyecto se propuso que el sistema tuviera un convertidor A/D de al menos 8 bits para realizar las pruebas de medición.
Se especificó que la alimentación de la TAD fuera de +5 volts, ya que es la tensión que provee la interface USB; entonces esta tensión se definió como la de referencia para el convertidor analógico digital.
3.3.3 Sensores
Debido que existe una gran variedad de sensores y cada uno interpreta la medida de manera diferente tal como se mostró en los tres casos del apartado 2.3 de este trabajo, se pretende que la TAD solo cuente con sus entradas A/D, para no limitar el acondicionamiento de la señal para cada tipo de sensor. De esta manera el acondicionamiento de la señal a su salida deberá de expresar la medición en un intervalo de 0 a 5V, valores correspondientes a la entrada del convertidor.
3.3.4 Interface USB
Las características principales de la USB ya están estandarizadas como es la tensión de 5V @ 500mA en la parte eléctrica, la forma de comunicación está regida por el protocolo USB. Solo resta definir qué tipo de transferencia se va a utilizar.
En el ANEXO A, se explica con mayor detalle las características y el funcionamiento del protocolo USB, en el mismo se explican las características de cada modo de trasferencia (bulk
transfer, interrump transfer, isochronous transfer y control transfer). Debido a que el modo bulk
tranfer presenta mayores ventajas respecto a la máxima tasa de trasferencia y la fiabilidad en la
37
Para bulk tranfer hay dos diferentes velocidades de transmisión, full speed
(12Mbps) y high speed (480Mbp). Para full speed la capacidad de transferencia va de los 8 hasta los 64 paquetes, en forma de tren o vector, cada paquete es de 1 byte. Para alta velocidad (high speed) la transmisión es de 512 paquetes.
Resumen
TAD
Hasta 8 convertidores Analógico-Digital.
Módulo USB.
De al menos 8 bits.
Voltaje de referencia de 5V. SENSORES
Que su medida la interpreten en un intervalo de 0 a 5V. USB
Cumplir con los requisitos del protocolo.
Usar el modo de transferencia bulk.
Especificar que la máxima corriente proporcionada por el puerto es de 500mA.
3.4
CARACTERÍSTICAS PARA EL DISEÑO DEL PROGRAMA
Como se mencionó anteriormente para el buen funcionamiento del sistema de adquisición debe de haber una coordinación entre etapas y los encargados de esta son el software de la tarjeta (TAD), el software instalado en la computadora y el programa de control.
38
El programa de control debe de contar con una función de selección de canales, una de programación de tiempo para el muestreo, una función que despliegue la medición de manera gráfica y una función que pueda generar un archivo de las mediciones con cualquier extensión. Además es importante definir cada canal de entrada con un color característico, para la fácil identificación.
Para cumplir esta serie de requisitos de diseño es importante implementar una interface de computadora gráfica para el fácil manejo y comprensión. El algoritmo del programa de control puede ser ensamblado en un lenguaje visual como por ejemplo visual
basic, visual C#, visual c, etc. Cualquiera de los lenguajes anteriores poseen las
características para desarrollar las funciones ya mencionadas.
39
CAPÍTULO 4
DISEÑO DEL SISTEMA
En este capítulo se explica el procedimiento del diseño y la construcción del sistema, conforme a los requisitos de diseño planteados en el capítulo 3. El diseño se divide en dos partes, la primera es el diseño de la TAD (Tarjeta de Adquisición de Datos), que comprende el circuito impreso, la programación de los puertos, del modulo USB y el controlador de la tarjeta, es decir la conjunción de hardware con software. La segunda, el diseño del programa de control desde la computadora, es decir el software que dirija a todo el sistema.
4.1 SELECCIÓN DE MICROCONTROLADOR
El primer paso para el diseño de la tarjeta fue determinar qué microcontrolador se utilizaría, según los requisitos de diseño este debería de contar con el módulo USB integrado.
Se encontró que en el mercado ya existía una familia de microcontroladores de la firma Microchip que cuenta con modulo USB 2.0. La familia PIC18FXX5X es una familia de microcontroladores que ofrece cuatro diferentes encapsulados de 28 o 40 terminales, dentro de sus características principales están:
La compatibilidad con USB V2.0.
Soportan las cuatro formas de transmisión (Bulk, Control, Isocrhonous, Interrumpt). Tienen hasta 32K bytes de memoria Flash.
40
Memoria EEPROM 256 bytes.
Convertidor Analógico/Digital de hasta 10 bits. Su alimentación va de 2.0V hasta 5.5V.
Cuenta con regulador de voltaje para el uso del modulo USB.1
Una vez ya conocidas las características principales de la familia conformada por los uat o PIC s, se dete i ó ual se utiliza ía.
Los uat o PIC s u ple si p o le a o las a a te ísti as de diseño, pe o se
buscó cual de los cuatro se ajustaba más a lo requerido. Los criterios fueron: que la cantidad de canales fuera la más cercana a 8 y que el circuito fuera compacto.
Estos criterios convierten en opción al PIC18F2450 y el PIC18F2550, por sus 10 canales A/D en sus 24 puertos de entrada y salida. Así que se utilizó el PIC18F2550, debido a la disponibilidad de éste en el mercado.
Se analizó también la posibilidad de emplear microcontroladores de la firma Texas
Instruments, ya que cuenta con una línea de microcontroladores de bajo consumo, se
consultó en el mercado y se encontró que el modulo USB para esta firma se encuentra fuera del microcontrolador, es decir para emplear la comunicación USB se requiere del encapsulado del microcontrolador y aparte el encapsulado del módulo de comunicación. Debido a esto se confirmó el uso del microcontrolador PIC.
41
4.2 DISEÑO DE LA TAD
Dentro del diseño de la TAD se considera la organización y operación de los puertos del microcontrolador y la implementación modulo USB, que abarca desde la selección de elementos pasivos, la definición (ID) de la Tarjeta, la determinación de la resolución y el diagrama de flujo del algoritmo.
Todo el conjunto de criterios de diseño e implementación del protocolo de comunicación Serial Universal se organiza y ejecuta mediante el algoritmo que se graba en la memoria del PIC y que a su vez es controlado por el usuario mediante el programa de control que se ejecuta desde la computadora.
4.2.1 SELECCIÓN DE PUERTOS
Una vez seleccionado el microcontrolador se determinó la configuración de las terminales del mismo.
El PIC18f2550 tiene 3 puertos, A, B y C. De los cuales el A y el B pueden ser utilizados como puertos de entrada y salida, en donde también están los canales del convertidor analógico-digital (A/D). En el puerto C se encuentran las terminales del módulo USB 2.0.
42
Según los criterios de diseño se requieren al menos 8 canales A/D, así que se escogieron cuatro canales en el puerto A (AN0, AN1, AN3, AN4) y cuatro en el puerto B (AN8, AN9, AN10, AN11). Además de los canales analógicos, se eligió la terminal RA4 como entrada o salida digital auxiliar. El resto de las terminales que no se ocupan en el programa se eligieron como salidas para evitar perturbaciones.
Las terminales para la conectividad USB ya están determinadas por el fabricante en el puerto C (VSUB, D+, D-).
4.2.2 MATERIAL NECESARIO PARA LA IMPLEMENTACIÓN DEL MODULO
USB EN EL PIC18F2550
Partiendo de las especificaciones que da el fabricante para implementar el módulo de comunicación universal serial, se tomaron los siguientes criterios de selección acompañados del material adquirido:
Se requiere de un oscilador que puede ser un cristal de cuarzo cuyo valor sea de 4Mhz o un múltiplo de este, con la facilidad de ajustar en el programa del µC mediante la instrucción PLLX, que divide la frecuencia del cristal y así se pueda ajustar a los 4Mhz que se requieren. Cabe destacar que dicha frecuencia es la que necesita el protocolo USB. En este caso, para cumplir con los requisitos de las especificaciones se usó un cristal de 12Mhz.
Figura 4.2 Ruta a seguir para que el Oscilador primario, un Cristal de
43
Se requieren dos capacitores para el oscilador cuyo valor dependen del cristal que se utilice, los valores van de 33pF a los 15pF. Como lo muestra la tabla 2-2 de la hoja de especificaciones del microcontrolador. Se adquirieron 2 capacitores de 15pF.
También se requiere un capacitor de 47µF, para el regulador de voltaje VUSB, que se conecta de la terminal VUSB a la referencia cuando la energía para el µC va a ser proporcionada por el Bus.
Figura 4.3 Conexión del capacitor de desacoplamiento
y del capacitor para el regulador.
Es necesario un capacitor de desacoplamiento de 0.001µF.
Un conector USB tipo B hembra y un cable USB A-B macho. Para mayor referencia consultar el ANEXO A.
En el apartado 4.2.1 se especifica la lista de materiales que se utilizaron para la construcción de la tarjeta de adquisición.
4.2.3 DIAGRAMA DE LA TAD
La Figura 4.4 muestra el diagrama eléctrico de la tarjeta de adquisición de datos, con la configuración de puertos antes descrita, los elementos pasivos antes sugeridos, además de un led indicador y la configuración de un botón pulsador para el restablecimiento.
44
Figura 4.4 Diagrama eléctrico de la TAD, realizado en el programa ISIS de Proteus 7.
4.2.4 DEFINICIÓN DE LA INFORMACIÓN DE IDENTIFICACIÓN DE LA TAD
La información de identificación de la TAD, son los números hexadecimales que van a identificar a la tarjeta de los demás dispositivos conectados mediante USB en la computadora. Estos son, el VID (ID del vendedor) y el PID (ID del producto). Para mayor información consultar ANEXO A.
Se definió como VID el número 0x04D8, que es el número asignado a la empresa
Microchip y se usa en este caso con el fin de desarrollo del prototipo, ya que el solicitar
un VID propio se usa con fines de producción y además tiene un costo anual como lo marca el membership aplication (solicitud de afiliación) en la página de la organización.2
Como PID se definió el numero 0x0033, número elegido arbitrariamente.
2www.usb.org RA0/AN0 2 RA1/AN1 3 RA2/AN2/VREF-/CVREF 4 RA3/AN3/VREF+ 5 RA4/T0CKI/C1OUT/RCV 6 RA5/AN4/SS/LVDIN/C2OUT 7 RA6/OSC2/CLKO 10 OSC1/CLKI 9 RB0/AN12/INT0/FLT0/SDI/SDA 21 RB1/AN10/INT1/SCK/SCL 22 RB2/AN8/INT2/VMO 23 RB3/AN9/CCP2/VPO 24 RB4/AN11/KBI0/CSSPP 25 RB5/KBI1/PGM 26 RB6/KBI2/PGC 27 RB7/KBI3/PGD 28 RC0/T1OSO/T1CKI 11 RC1/T1OSI/CCP2/UOE 12 RC2/CCP1 13 VUSB 14 RC4/D-/VM 15 RC5/D+/VP 16 RC6/TX/CK 17 RC7/RX/DT/SDO 18 RE3/MCLR/VPP 1 U1 PIC18F2550 C1 15pF C2 15pF 12MHZ CRYSTAL C3 0.47uF VCC 1 D+ 3 D- 2 GND 4 PC USB R1 10k (R2) (1k) R3 1k D1 LED-GREEN D2 LED-RED
Canal 2: AZUL Canal 1: ROJO
Canal 3: NEGRO
OSC2/CLKO
OSC2/CLKO
Canal 4: PURPURA
45
La importancia de definir estos datos desde antes del diseño de algoritmos radica en que aparecerán en el programa de la TAD, en el controlador de la TAD y el programa de control en la PC.
4.2.5 IMPLEMENTACIÓN DEL CONVERTIDOR ANALÓGICO-DIGITAL
Como parte del diseño del software de la TAD se definió la forma de operación del convertidor analógico digital que abarca la resolución y la tensión de referencia.
Como se planteó en el apartado 3.3.2, se considera un convertidor A/D de 8 bits, que es como se ajusta el ADC del microcontrolador, ya que a pesar de que el PIC18F2550 tiene un convertidor de hasta 10 bits, se definió de 8 bits debido a que la información bulk transfer se envía en vectores de 20 casillas para full speed (máxima velocidad del microcontrolador 2550) y cada casilla tiene 8 bits de capacidad, de esta forma la comunicación permite enviar la información de un canal en una casilla individual. Como se muestra en la figura 4.5.
La tensión de referencia que se utiliza para el convertidor A/D es de 5V, tensión utilizada como alimentación para la TAD.
Es importante recordar que el ADC funciona con juego de circuitos comparadores, donde cada comparador tiene un nivel que es proporcional a la tensión de referencia. Entonces la tensión de entrada es comparada con la tensión del juego de comparadores y según el valor de entrada tendrá un nivel, que después es decodificado y al final se obtiene un valor entero llamado lectura del ADC.
Una vez conocido a cuantos bits se ajusta el ADC y la tensión de referencia, se puede determinar la resolución, que al multiplicarse con la lectura del ADC, da la tensión a la entrada. Para hacer el cálculo de la Resolución se hace uso de la Ecuación 4.1.
4.1
46
Sustituyendo valores en la ecuación 4.1 tenemos que:
4.2
La ecuación 4.3 muestra cómo convertir la lectura ADC a la medición del sistema haciendo uso de la resolución.
4.3
4.2.6 DIAGRAMA DE FLUJO DEL ALGORITMO QUE RIGE LA TAD
Una vez definidas las terminales de entrada y el material necesario para implementar la comunicación, se presenta el diagrama de flujo que representa el algoritmo del programa que se ejecuta en el microcontrolador y que hace funcionar la TAD.
Como ya se mencionó, la comunicación se organizó mediante paquetes. Es decir, cada vez que se envía información se hace por medio de vectores o trenes de 20 casillas, las diez primeras se reservan como casillas de control y las diez siguientes se reservan como casillas de información, como se muestra en la figura 4.5.
SECCIÓN DE CONTROL SECCIÓN PARA ENVIÓ DE INFORMACIÓN
Figura 4.5 Representación gráfica del vector por el cual se envía la información mediante el bulk
transfer
47
activados. Las casillas del 11 al 20 están asignadas para transportar la información de los canales, esto se hace con ayuda de la selección de canal, es decir la casilla 1.
Inicio
Ajuste de retardo a 48000 000
Desactivación de USB HID y activación de comunicación Bulk
Se manda llamar a la función Control USB que contiene los descriptores entre los cuales están el
VID: 04d8 y PID: 0084 PIC18F2550
P.P.
Se declara el vector dato[20] mediante el cual se leerá y
escribirá la información. Se manda llamar funciones para el módulo USB del PIC
usb.c Ajuste de ADC a 8 Bits
Se activan y calibran los #Fuses para configurar al PIC. Es importante ajustar el reloj a 4MHz
Se declara un buffer de 20 EP1[20]
48
Sí 1=1 ¿Enumeración lista? Encendido
Llamado del Host
P.P.
AN0, AN1, AN2, AN4, AN8, AN9, AN10, AN11: ON
Encendido
Espera de enumeración
Dato[1]:CANAL
AN0
Canal 2: AN1
Canal 3: AN2
Canal 4: AN4
Canal 5: AN11
Canal 6: AN9
Canal 7: AN8
Canal 8: AN10
Canal 1 Canal 2 Canal 3 Canal 4 Canal 5 Canal 6 Recibir
Diagrama 4.2 Diagrama de flujo del programa
49
Diagrama 4.3. D.F. de estru tura de la fu ió Re i ir desde la PC.
Diagrama 4.4. Diagra a de flujo de estru tura de las fu io es Ca al X: ANY la ual e via la i for a io
del canal X a la computadora.
El diagrama 4.1 muestra la declaración de las funciones de cabecera y de los ajustes de comunicación, ajuste del reloj a 4MHz, el retardo a 48M, la declaración de modo de transferencia Bulk, ajuste del ADC a 8 bits y la declaración del vector dato con 20 casillas.
En el diagrama 4.2 se muestra el diagrama de flujo del programa principal que inicia con la declaración de los canales analógicos a utilizar, después enciende la luz indicadora roja como señal de espera de enumeración, la luz cambia a verde cuando el proceso de enumeración fue finalizado por parte del Host o la computadora.
Después inicia el bucle infinito que permite que la parte del programa que a continuación se describe se repita una y otra vez. Se pregunta si es que la TAD está conectada a la computadora, de ser así ahora se pregunta si hay algún paquete para la TAD, si es que hay paquete, se ejecuta la función Recibir descrita en el diagrama 4.3 que lee el dato que está en la casilla 1 del vector dato.
Recibir Información
EP1=Dato[1] determina el canal a trabajar
Recibir
FIN
Enviar información Dato[Y]=Lectura
Canal X: ANY
50
En casilla 1 del vector dato se encuentra un número entero (del 1 al 8) que indica qué canal es requerido por el usuario. Dependiendo del canal se ejecutará la función que tome lectura del ADC y que lo envié en las casillas del 11 al 18, como lo muestra la figura 4.5, esta función esta descrita por el diagrama 4.4.
Es importante mencionar que hasta aquí lo que se envía a la PC es el dato de la lectura del ADC, que es de un entero de tipo Byte, y que hasta el programa de control se traduce a tensión.
El desarrollo del algoritmo para la TAD se lleva a cabo en el programa C CCS (PIC C
Compiler), ya que cuenta con las funciones para la comunicación USB y hace más sencilla
la programación. El código se generó en lenguaje C++.
4.2.7 CONSTRUCCIÓN DE LA TAD
Según los requisitos de diseño, esta tarjeta debe de tener dimensiones compactas y contar con conectores estándares para que sea práctico el conectarla a la PC y a una amplia gama de sensores.
Siguiendo estos requisitos se diseño, construyó y armó la tarjeta para adquirir datos, utilizando los materiales que a continuación se enlistan:
4.2.7.1 MATERIAL
1 PIC18F2550 1 Cristal de 12MHz 2 Capacitores de 15pF 1 Capacitor de 47µF 1 Capacitor de 1nF
1 LED bicolor (Tres Terminales) ‘esisto de KΩ
‘esisto de kΩ
1 Push Botton NA
1 Conector UBS hembra tipo B
51
4.2.7.2 DISEÑO DEL PBC
Se realizó el diseño de la tarjeta en el programa Circuit Wizard, posteriormente se construyó la placa por el método serigráfico debido a que es confiable y económico para la elaboración de una tarjeta de estas dimensiones, finalmente se ensamblaron los elementos y se soldaron a la placa de manera manual. A continuación se muestra la imagen simulada de la TAD, el layout y una fotografía de la tarjeta terminada.
Figura 4.6Imagen 3D de la TAD.
52
Figura 4.8 Fotografía de la TAD una vez armada.
4.3 CONTROLADOR DE LA TAD
El driver o controlador de la TAD consta de una serie de al menos cuatro archivos
que se instalan en el S.O. de la PC. La función de estos archivos es que el sistema operativo reconozca a la TAD cada vez que esta sea conectada.
La identificación de dispositivos la hace gracias a los datos VID y PID contenidos en el archi o hpus .i f , ade ás de ue e el is o a hi o se puede de la a todas las características del dispositivo como nombre, clase, fabricante, etc. datos que se visualizan desde las propiedades en el administrador de dispositivos del SO.
Para generar el controlador de la TAD se partió de uno estándar que proporciona
Microchip ue a o tie e los uat o a hi os: Io tls.h , hpus .i f , hpus . at
hpus .s s , poste io e te se sustitu ó el a hi o hpus .i f ha ie do uso del
53
4.4 DISEÑO DEL PROGRAMA DE CONTROL
Para realizar la compilación del algoritmo de control se hizo uso del Programa
Visual Studio 2008, se utilizó el lenguaje C# y para la gráfica se hizo uso de la aplicación
ZedGRaph.
El algoritmo se muestra en los siguientes diagramas de flujo:
Windows, mpusbapi
Inicio
Se declara VID: 04d8 y PID: 0084 acorde con los declarados en el µC
CARGAR DLL
Dato[20], Lectura[9], Voltaje[9], Resolución=0.0196, Medición[9],
Muestra
Se declaran los Pipes de entrada y de salida
Diagrama 4.5 Declaración de funciones de cabecera y variables del programa de control.
54 Selección de canales
P.P.
Selección por CLIC en botón
Iniciar
Botó Pa a Botó I i io
CH2 CH3 CH4 CH7 CH8
TAD conectada
Información TAD
Parar
Generar Archivo
Botó Ge e a A hi o
Diagrama 4.6 Diagrama de Flujo del programa principal del programa de control.
Cerrar Programa
CH5 CH6
CH1
55 Iniciar
Limpieza de Graficas
Limpieza de Mediciones y Registro
Selección Tiempo
Selección de Sensor
Iniciar Timer 1 y Timer 2
Diagrama 4.7 Diagrama de flujo de la
fu ió I i iar .
Selección de Tiempo
Sensor
Tiempo muestro= Tiempo muestro *3600000
hrs
min
seg
Tiempo muestro= Definido Usuario
Tiempo muestro= Tiempo muestro *60000
Tiempo muestro= Tiempo muestro *1000
Se ajusta Timer 2 a Tiempo muestro
Diagrama 4.8 Diagrama de flujo de la función “ele ió de Tie po .
56
Selección de Sensor
Sensor
Factor de Ajuste =100
LM35
Factor de Ajuste =Definido Usuario o Factor de Ajuste =1, para voltaje
LIBRE
Diagrama 4.9 Diagrama de flujo de la
fu ió “ele ió de “e sor .
Fin
Timer 1
Barra Indicadora
Dato[2]=Canal Muestra=Muesta+1
Lectura[x]=Dato[x] Voltaje[x]=Lectura[x]* Resolución Medición[x]=Voltaje[x]*Factor de Ajuste
¿Fin Timer 1?
Graficar Medición
Parar No
SI
Diagrama 4.10 Diagrama de flujo
de la fu ió Ti er .
57 Comunicación
Abrir Pipes
Recibir Paquete
Enviar Paquete
Cerrar pipes
FIN
Asignar Información de Buffer a Dato
Diagrama 4.11 Diagrama de flujo
de la fu ió Co u i a ió .
Timer 2
¿Fin Timer 2?
Parar
SI
NO
Parar
Desactivar Timer 1 y Timer 2
FIN
Diagrama 4.12 Muestra el D.F.
de la fu ió Ti er .
58
En el diagrama 4.5 se muestra la declaración de las funciones de cabecera y las variables que se utilizan en el desarrollo del programa de control, en el diagrama 4.6 se muestra el diagrama de flujo del programa principal. Para que comience la operación del sistema basta accionar la función iniciar, el diagrama de dicha función se muestra en el diagrama 4.7.
La función inicio comienza con la inicialización de la gráfica, la mediciones y el registro de muestras, continua con la ejecución de la función selección de sensor, que se encarga de asignar el valor del factor de ajuste que es asignado por el usuario, este factor ayuda a interpretar la medición voltaje a la variable que se está midiendo. Después se ejecuta la función selección de tie po ue asig a el alo a la a ia le tie po de uest eo , es de i ue el usua io edia te este valor determina el tiempo de muestreo, tal como lo muestran los diagramas 4.9 y 4.8 respectivamente.
Una vez determinados los valores del factor de ajuste y el tiempo de muestreo, se inician los timer o temporizadores 1 y 2. El primero se encarga de ejecutar la función de comunicación, la interpretación de lectura hasta medición y la gráfica la medida cuantas veces lo permita el timer 2, quien es el encargado de llamar a la función parar, esto una vez transcurrido el tipo de muestreo indicado por el usuario. También puede hacerlo si así lo desea el usuario, llamando a la función parar dando clic. Como lo muestran los diagramas 4.12 y 4.13.
[image:58.612.122.494.479.690.2]Es importante mencionar que la descripción de funcionamiento del programa de control se complementa con el Manual de Usuario del ANEXO B, en donde se describe la operación del sistema desde el ambiente gráfico.
59
CAPÍTULO 5
PRUEBAS DE FUNCIONAMIENTO Y ANÁLISIS DE RESULTADOS
En este capítulo se muestran las tres pruebas que se le aplicaron al sistema para verificar su funcionamiento, comparando las mediciones del sistema de adquisición de datos con un instrumento de medición para cada tipo de variable.
Las dos primeras pruebas se realizaron para determinar la exactitud y el ancho de banda del sistema, estas se llevaron a cabo en el laboratorio donde se le aplicaron una serie de señales al sistema de adquisición de datos y a un osciloscopio.
La tercera prueba consistió en conectar al sistema un sensor LM35 y realizar mediciones de temperatura y compararlo con un termómetro digital.
5.1
PRUEBA DE LABORATORIO
En este apartado se verificar el funcionamiento de sistema de adquisición de datos, se determina la exactitud del sistema comparando el valor de tensión en la lectura del sistema de adquisición con los del osciloscopio y se realiza un barrido de frecuencia para cada tipo de señal para determinar el ancho de banda del sistema.
5.1.2 MATERIAL
60
o Computadora portátil TOSHIBA SATELLITE TD115D, con el Programa
de control y el Controlador (Driver) del Sistema de Adquisición de Datos instalados.
o La Tarjeta de Adquisición de Datos.
1 Punta de prueba atenuada y compensada. Cables para conexiones.
5.1.3 PROCEDIMIENTO Y RESULTADOS
[image:60.612.137.479.371.538.2]Se conectó el generador de funciones al canal 1 del sistema de adquisición y al canal 1 del osciloscopio digital tal como lo muestra el diagrama de la figura 5.1 y la fotografía de la figura 5.2.
Figura 5.1 Diagrama eléctrico de la prueba de laboratorio.
RA0/AN0 2 RA1/AN1 3 RA2/AN2/VREF-/CVREF 4 RA3/AN3/VREF+ 5 RA4/T0CKI/C1OUT/RCV 6 RA5/AN4/SS/LVDIN/C2OUT 7 RA6/OSC2/CLKO 10 OSC1/CLKI 9 RB0/AN12/INT0/FLT0/SDI/SDA 21 RB1/AN10/INT1/SCK/SCL 22 RB2/AN8/INT2/VMO 23 RB3/AN9/CCP2/VPO 24 RB4/AN11/KBI0/CSSPP 25 RB5/KBI1/PGM 26 RB6/KBI2/PGC 27 RB7/KBI3/PGD 28 RC0/T1OSO/T1CKI 11 RC1/T1OSI/CCP2/UOE 12 RC2/CCP1 13 VUSB 14 RC4/D-/VM 15 RC5/D+/VP 16 RC6/TX/CK 17 RC7/RX/DT/SDO 18 RE3/MCLR/VPP 1 U1 PIC18F2550 C1 15pF C2 15pF 12MHZ CRYSTAL C3 0.47uF VCC 1 D+ 3 D- 2 GND 4 PC USB R1 10k (R2) (1k) R3 1k D1 LED-GREEN D2 LED-RED
Canal 2: AZUL Canal 1: ROJO Canal 3: NEGRO OSC2/CLKO
OSC2/CLKO
Canal 4: PURPURA Canal 8:DORADO Canal 7: NARANJA Canal 6: CYAN Canal 5: MAGENTA