INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL ZACATENCO
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
ANÁLISIS NUMÉRICO DE FALLA
PARA HERRAMIENTA DE IMPLEMENTO
DE EQUIPO DE MAQUINARIA PESADA
T E S I S
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS
EN INGENIERÍA MECÁNICA
PRESENTA
ING. GUSTAVO ADRIÁN REYES JIMÉNEZ
DIRECTORES
DR. GUILLERMO URRIOLAGOITIA SOSA
DR. GUILLERMO URRIOLAGOITIA CALDERÓN
INSTITUTO POLITÉCNICO NACIONAL
SECRETARÍA DE INVESTIGACIÓN Y POSGRADOCARTA DE CESIÓN DE DERECHOS
En la Ciudad de México, Distrito Federal, el día 05 de Noviembre de 2012, el que suscribe, ING. GUSTAVO ADRIÁN REYES JIMÉNEZ, alumno del Programa MAESTRÍA EN CIENCIAS EN INGENIERÍA MECÁNICA, con número de registro A110580 adscrito a la Sección de Estudios de Posgrado e Investigación de la Escuela Superior de Ingeniería Mecánica y Eléctrica, Unidad Profesional Zacatenco, manifiesta que es autor intelectual de este trabajo de Tesis bajo la dirección del DR. GUILLERMO URRIOLAGOITIA SOSA y DR. GUILLERMO URRIOLAGOITIA CALDERÓN, y cede los derechos del trabajo titulado “ANÁLISIS NUMÉRICO DE FALLA PARA
HERRAMIENTA DE IMPLEMENTO DE EQUIPO DE MAQUINARIA PESADA” al
Instituto Politécnico Nacional para su difusión con fines académicos y de Investigación.
Los usuarios de la información no deben reproducir el contenido textual, gráficas o datos del trabajo sin el permiso expreso del autor y/o directores del trabajo. Este puede ser obtenido escribiendo a la siguiente dirección electrónica: [email protected] .
Si el permiso se otorga, el usuario deberá dar el agradecimiento correspondiente y citar la fuente del mismo.
Agradecimientos
Al Instituto Politécnico Nacional.
A la Escuela Superior de Ingeniería Mecánica y Eléctrica. A la Sección de Estudios de Posgrado e Investigación. Al Consejo Nacional de Ciencia y Tecnología.
A Madisa Caterpillar.
Al Dr. Guillermo Urriolagoitia Sosa por la oportunidad otorgada para la obtención de este grado, tiempo, apoyo invaluable y sabios consejos brindados.
Resumen
En este trabajo de tesis se desarrolla la investigación referente al análisis numérico de falla, a través, de la evaluación del estado de esfuerzos y deformaciones presentados por la herramienta de implemento de un equipo de maquinaria pesada específicos, así como de sus componentes estructurales localizados como críticos, durante diferentes condiciones y etapas externas presentadas y propuestas, habiéndose generando en CAD los modelados a evaluar y simulándose a partir empleo del Método del elemento finito, a fin de recopilar información referente a la falla de tal elemento estructural. Inicialmente se comienza con el desarrollo de la investigación a cerca de la información previa sobre esta temática, esto con el fin de comprender y determinar sus efectos, su origen y su clasificación, además de los diferentes parámetros que han dado su desarrollo, ubicándo el plano y nivel en el que se localiza el arte.
En una primera etapa se involucran los fundamentos teóricos referentes a la generación de una gran diversidad de equipos de maquinaria pesada y haciéndose énfasis en los equipos y elementos estructurales de nuestro específico interés, localizándo así, lo referente a los
Tractores de cadenas y sus respectivas herramientas de implemento, así como los inherentes elementos mecánicos involucrados en el funcionamiento propio.
Abstract
In this thesis research is conducted concerning the numerical analysis of failure, through, assessing the state of stress and strain produced by the tool implement a specific heavy machinery equipment, as well as localized structural components as critics, for different conditions and external steps and proposals submitted, having generated in the CAD modeling and simulating assess from the use of Finite element method in order to collect information regarding the failure of such structural element. Initially it starts with the development of research about pre-information on this subject, this in order to understand and determine their effects, their origin and their classification, in addition to the various parameters that have their development, placing the flat and level which is located in the art.
The first stage involved the theoretical foundations concerning the generation of a wide range of heavy machinery equipment and making emphasis on equipment and structural elements of our specific interest, locating well, the Bulldozer and their tools implement as well as the inherent mechanical elements involved in the operation itself.
Then you begin to develop the fundamental objective of this thesis work, which are generated by the modeling of different structural components belonging to implement tool to get a whole complete assembly of the structure is evaluated and numerically simulated to through the
Objetivos
Objetivo General
Generar el análisis numérico de falla para la herramienta del implemento en un equipo de maquinaria pesada.
Objetivos Particulares
Para lograr alcanzar el objetivo general que anteriormente se propone, es necesario cubrir con una serie de objetivos particulares que a continuación se presentan.
• Conocer y comprender el comportamiento estructural de trabajo de la herramienta de implemento de un equipo de maquinaria pesada.
• Describir el arreglo geométrico estructural de la herramienta de implemento de un
equipo de maquinaria pesada, para de esta manera comprender mecánicamente su comportamiento. Así como, las condiciones de falla.
Justificación
La maquinaria pesada es una de la más importantes industrias a nivel mundial en nuestros días, con un desarrollo tecnológico incesante y una expansión creciente y acelerada, además de ser una de las industrias que mayor cantidad de capitales genera directa e indirectamente; por lo anterior no es una industria aislada sólo involucrada únicamente en su producción, si no también tiene fuertes efectos e injerencia en diferentes ramas de la industria actual tales como construcción general, construcción pesada, minería, canteras, trituración y perforación, generación de energía, agricultura y pesca, extracción de petróleo, transporte marino, entre una gran diversidad más de aplicaciones y ramas de la industria.
Por lo anterior con el fin de tener una alta confiabilidad en equipos de maquinaria pesada, es de primera importancia hacer énfasis a aquellos componentes estructurales en los cuales se presenta una mayor cantidad de esfuerzos, fallas, mantenimientos y ciclos de trabajo siendo así la herramienta del implemento del equipo la percibida de acuerdo a estos criterios, además de ser aquel componente estructural primordial e indispensable para la totalidad de los trabajos realizados por el equipo, al ser la herramienta ejecutante del trabajo. Si este componente estructural llegara a fallar de manera importante o sufrir un colapso, dependiendo de la localización y el daño causado a la estructura, puede conducir a fallas catastróficas y a costosos tiempos improductivos y mantenimientos.
Índice general
Resumen i
Abstract ii
Objetivos iii
Justificación iv
Índice general v
Índice de figuras xiii
Índice de tablas xviii
Simbología xix
Introducción xxi
Capítulo I. Estado del arte I.1.- Maquinaria pesada 2
I.2.- Antecedentes históricos de la maquinaria pesada 2
I.2.1.- Niveladora 4
I.2.2.- Raspador 4
I.2.3.- Bulldozer 5
I.2.4.- Tractor agrícola 5
I.2.5.- Compactadora 6
I.3.- Maquinaria pesada con herramienta de implemento 7
I.3.1.- Especificaciones de equipos con herramienta de implemento 8
I.3.1.1.- Potencia y peso del equipo 8
I.3.1.2.- Transmisiones 8
I.3.1.3.- Eficiencia de combustible 9
I.3.1.4.- Herramienta de implemento 10
I.4.- Retroexcavadora 10
I.4.1.- Definición 10
I.4.2.- Operaciones 11
I.4.3.- Aplicaciones 11
I.4.4.- Tipos 12
I.4.4.1.- Retroexcavadora mixta 12
I.4.5. Aplicaciones 13
I.4.6.- Transporte 13
I.4.7.- Mantenimiento 13
I.4.8.- Proveedores y marcas 14
I.5.- Cargador frontal 14
I.5.1.- Definición 14
I.5.2.- Operaciones 15
I.5.3.- Aplicaciones 15
I.5.4.- Tipos 15
I.5.5.- Transporte 16
I.5.6.- Mantenimiento 16
I.5.7.- Proveedores y Marcas 16
I.6.- Motoniveladora 16
I.6.1.- Definición 16
I.6.2.- Operaciones 17
I.6.3.- Esquema 17
I.6.4.- Aplicaciones 18
I.6.5.- Tipos 18
I.6.6.- Transporte 18
I.6.7.- Mantenimiento 19
I.6.8.- Proveedores y Marcas 19
I.7.- Tractorbulldozer 19
I.7.1.- Definición 19
I.7.2.- Operaciones 20
I.7.3.- Aplicaciones 20
I.7.4.- Tipos 20
I.7.4.1.- Por el sistema de traslación 20
I.7.4.2.- Por la forma en que mueve su herramienta de implemento 21
I.7.4.3.- Otra clasificación según Caterpillar 21
I.7.5.- Herramienta de implemento, hoja recta “S” 21
I.7.7.- Herramienta de implemento, hoja amortiguada "C" 22
I.7.8.- Herramienta de implemento, hoja universal "U" 23
I.7.9.- Herramienta de implemento, hoja semiuniversal “SU” 23
I.7.10.- Control de la herramienta de implemento 24
I.7.11.- Accesorios Adicionales 24
I.7.12. Transporte 24
I.7.13.- Mantenimiento 24
I.7.14.- Proveedores y Marcas 25
I.8.- Planteamiento del problema 26
I.9.- Sumario 27
I.10.- Referencias 28
Capítulo II. Fundamentos teóricos II.1.- Tractor de cadenas D8T 30
II.2.- Motor C15 con tecnología ACERT 30
II.2.1.- C15 31
II.2.2.- Potencia neta constante 31
II.2.3.- Bloque del C15 31
II.2.4.- Controlador del Motor ADEM A4 31
II.2.5.- Suministro de combustible 32
II.2.6.- Sistema de combustible MEUI 32
II.2.7.- Posenfriamiento de aire a aire remoto y flujo de aire 32
II.2.8.- Turbocompresión y posenfriamiento de aire a aire 32
II.2.9.- Servicio 32
II.3.- Controles de la dirección y del accesorio 33
II.3.1.- Control de la dirección 33
II.3.2.- Control electrónico del desgarrador 33
II.3.3.- Control electrónico programable de la hoja topadora 33
II.3.4.- Palanca de control de la herramienta de implemento 34
II.3.5.- Inclinación Vertical Automática 34
II.3.6.- Opción Lista para AccuGrade (ARO) 34
II.3.8.- Palanca de control del desgarrador 35
II.3.9.- Sistema de control del timón 36
II.4.- Tren de impulsión 36
II.4.1.- Divisor de par 36
II.4.2.- Sistema de dirección de diferencial 36
II.4.3.- Servotransmisión planetaria 37
II.4.4.- Tracción en la barra de tiro frente a cambios de velocidad 38
II.4.5.- Mandos finales elevados 38
II.5.- Tren de rodaje 38
II.5.1.- Diseño con tren de rodaje amortiguado 39
II.5.2.- Suspensión con soportes basculantes 39
II.5.3.- Montaje de rodillo superior integrado 39
II.5.4.- Rodillos y ruedas guía 39
II.5.5.- Bastidores de rodillos 40
II.5.6.- Segmentos de ruedas motrices 40
II.6.- Estructura 40
II.6.1.- Resistencia del bastidor principal 40
II.6.2.- Rieles del bastidor 41
II.6.3.- Fundiciones de acero pesado 41
II.6.4.- Rieles superior e inferior 41
II.6.5.- Caja principal 41
II.6.6.- Eje pivote 41
II.6.7.- Barra compensadora 42
II.6.8.- Tirante estabilizador 42
II.7.- Herramientas de implemento 42
II.7.1.- Hojas topadoras 42
II.7.1.1.- Hoja semiuniversal 42
II.7.1.2.- Hoja universal 43
II.7.2.- Inclinación doble optativa 44
II.7.3.- Cuchillas y cantoneras 44
II.7.4.- Desgarradores 44
II.7.4.2.- Desgarrador con vástagos múltiples 44
II.7.5.- Sistema hidráulico 44
II.7.6.- Contrapesos traseros 45
II.8.- Capacidad de servicio 45
II.8.1.- Filtro de aceite del motor 45
II.8.2.- Separador de agua y filtro de combustible 45
II.8.3.- Conexiones de desconexión rápida 45
II.8.4.- Análisis S.O.S. 45
II.8.5.- Product Link PL300 de Caterpillar 45
II.8.6.- Respaldo al equipo 46
II.8.7.- Componentes remanufacturados 46
II.9.- Dimensiones del equipo 46
II.10.- Selección de la herramienta de implemento 47
II.10.1.- Materiales a mover 47
II.10.2.- Limitaciones del equipo 48
II.11.- Medición de la producción fuera del trabajo 48
II.11.1.- Producción promedio por hora del bulldozer D8T con herramienta de implemento semiuniversal 51
II.12.- Medición de la producción en el trabajo 52
II.12.1.- El empleo de técnicas de reconocimiento 52
II.12.2.- Peso de cargas de la hoja 52
II.12.3.- Medición de cargas de la hoja 53
II.13.- Soportes de borde de corte para las herramientas de implemento 54
II.13.1.- Descripción 54
II.13.2.- Características y Beneficios 54
II.13.3.- Instrucciones de instalación 54
II.13.4.- Cantoneras 55
II.13.5.- Finales de hoja 55
II.13.6.- Sujetadores roscados 56
II.13.7.- Placas de desgaste 56
II.13.8.- Barras de desgaste 56
II.15.- Referencias 57
Capítulo III. Análisis numérico elástico para herramienta de implemento III.1.- Introducción al Método del Elemento Finito (MEF) 61
III.1.1.- Breve historia del MEF 62
III.1.2.- Conceptos generales del MEF 63
III.1.3.- Funcionamiento del MEF 66
III.1.4.- Formulación del MEF 67
III.2.- Programa computacional Mechanical Desktop de diseño y modelado 68
III.2.1.- Ventajas de Mechanical Desktop 70
III.3.- Dimensiones de la herramienta de implemento 70
III.4.- Construcción tridimensional de la herramienta de implemento 71
III.5.- Ensamble de herramienta de implemento 75
III.6.- Generación de archivo con extensión SAT 75
III.7.- Condiciones de la herramienta de implemento en operación 75
III.8.- Requerimientos para análisis por MEF en ANSYS 78
III.9.- Análisis numérico por Método del Elemento Finito 79
III.9.1.- Preprocesamiento 79
III.9.2.- Aplicación de restricciones y agentes externos 81
III.9.3.- Postprocesamiento 82
III.10.- Análisis de resultados 86
III.11.- Sumario 86
III.12.- Referencias 87
Capítulo IV. Análisis numérico elastoplástico para herramienta de implemento IV.1.- Elastoplasticidad 89
IV.2.- Teoría Elastoplástica 90
IV.2.1.- Superficie de fluencia 90
IV.2.2.- Regla de flujo 90
IV.2.3.- Relación tensión-deformación 91
IV.3.- Tratamiento Elastoplástico 91
IV.4.- Comportamiento elastoplástico del acero estructural 92
IV.6.- Criterio de Von Mises para Elastoplasticidad 97
IV.7.- Endurecimiento por deformación 98
IV.7.1.- Endurecimiento cinemático 100
IV.7.2.- Endurecimiento cinemático lineal 101
IV.8.- Esfuerzos residuales 102
IV.8.1.- Efectos de los esfuerzos residuales 102
IV.9.- Condiciones de la herramienta de implemento para análisis elastoplástico 104
IV.10.- Modelado y exportado de herramienta de implemento en CAD 105
IV.11.- Requerimientos para análisis por Método del Elemento Finito 106
IV.12.- Análisis elastoplástico por Método del Elemento Finito 107
IV.12.1.- Preprocesamiento 107
IV.12.2.- Procesamiento 110
IV.12.3.- Postprocesamiento 111
IV.13.- Análisis de resultados 117
IV.14.- Sumario 117
IV.15.- Referencias 118
Capítulo V. Análisis numérico elastoplástico para soportes de herramienta de implemento V.1.- Elementos estructurales del sistema hidráulico en maquinaria pesada 120
V.1.1.-Mangueras 122
V.1.2.- Acoplamientos 123
V.1.3.- Bombas y motores hidráulicos 123
V.1.4.- Sellos 123
V.1.5.- Válvulas 124
V.1.6.- Cilindros hidráulicos 124
V.1.7.- Camisas 124
V.1.8.- Soporte de aplicación del cilindro hidráulico 124
V.2.- Dimensionamiento de soportes para cilindros hidráulicos 125
V.4.- Modelado y exportado de soportes para levante e inclinación en CAD 128
V.5.- Elementos necesarios para análisis elastoplástico por MEF 128
V.6.- Análisis elastoplásticos de soportes por MEF 129
V.6.1.- Preprocesamientos 129
V.6.2.- Procesamientos 132
V.6.3.- Postprocesamientos 133
V.7.- Análisis de resultados 139
V.8.- Sumario 139
V. 9.- Referencias 140
Conclusiones y discusiones 142
Índice de figuras Capítulo I
Figura I.1.- Maquinaria pesada 2
Figura I.2.- Maquinaria pesada en la antigüedad 3
Figura I.3.- Niveladora autopropulsada introducida por primera vez en 1909 4
Figura I.4.- Motoniveladora actual 4
Figura I.5.- Tractor de oruga de término genérico Caterpillar 5
Figura I.6.- Uno de los primeros tractores asociados a actividades de agricultura 6
Figura I.7.- Compactadora mecánica manufacturada en Reino Unido, líder en producción 6
Figura I.8.- BulldozerCaterpillar, equipo con herramienta de implemento 7
Figura I.9.- Presentaciones más comunes para combustible diesel y aceites Caterpillar 9
Figura I.10.- El bulldozer más grande del mundo, Komatsu D575A-3 Super Dozer 10
Figura I.11.- Dimensiones de maniobrabilidad de una retroexcavadora Case 11
Figura I.12.- Cargador frontal Volvo 14
Figura I.13.- Motoniveladora 170B New Holland 17
Figura I.14.- Tractorbulldozer D8T Caterpillar 19
Figura I.15.- Herramienta de implemento, hoja recta “S” 22
Figura I.16.- Herramienta de implemento, hoja amortiguada “C” 23
Figura I.17.- Herramienta de implemento, hoja semiuniversal “SU” 23
Capítulo II Figura II.1.- Bulldozer D8T Caterpillar en operación 30
Figura II.2.- Motor C15 ACERT Caterpillar 31
Figura II.3.- Desgarrador (ripper)para bulldozer D8T Caterpillar 33
Figura II.4.- Pantalla del CAES 35
Figura II.5.- Tren de impulsión acoplado a motor 36
Figura II.6.- Servotransmisión planetaria de tren de impulsión 37
Figura II.8.- Tren de rodaje con rueda motriz elevada 39
Figura II.9.- Bastidor principal 41
Figura II.10.- Herramienta de implemento semiuniversal SU 43
Figura II.11.- Dimensiones de bulldozer D8T Caterpillar 46
Figura II.12.- Producción estimada para hojas semiuniversales de equipos D6N a D11R 49
Figura II.13.- Producción estimada para hojas universales de equipos D6N a D11R 50
Figura II.14.- Producción estimada para hojas rectas de equipos D6N a D11R 50
Figura II.15.- Porcentaje de pendiente de terreno contra factor de empuje 51
Figura II.16.- Factores de corrección para condiciones de trabajo 52
Figura II.17.- Vistas superior y lateral de parámetros de pilas de material 53
Figura II.18.- 1) Identificación de partes, 2) Dimensiones críticas 55
Capítulo III Figura III.1.- Discretización del continuo 61
Figura III.2.- Condiciones de contorno, contorno y dominio 63
Figura III.3.- Viga en voladizo con carga puntual en extremo 64
Figura III.4.- Discretizado del dominio 65
Figura III.5.- Solución a problemas odontológicos con MEF 66
Figura III.6.- Pantalla principal de Mechanical Desktop 69
Figura III.7.- Mediciones físicas de herramienta de implemento 71
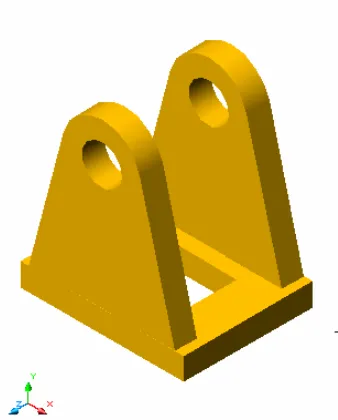
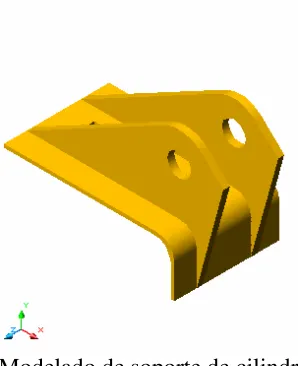
Figura III.8.- Modelado de soporte de brazo de sujeción 72
Figura III.9.- Modelado de extremo 72
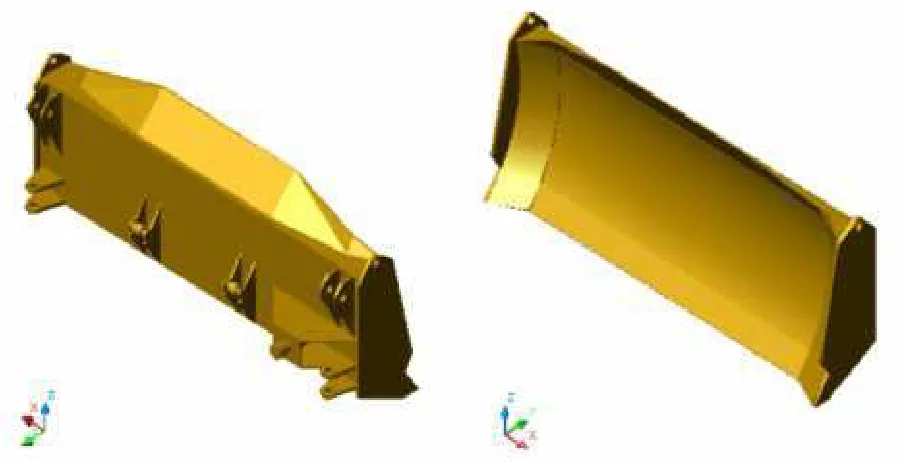
Figura III.10.- Modelado de hoja frontal 73
Figura III.11.- Modelado de cara posterior y esqueleto interno 73
Figura III.12.- Modelado de soporte de cilindro de elevación 74
Figura III.13.- Modelado de soporte de barra estabilizadora 74
Figura III.14.- Modelado de soporte de cilindro de inclinación 74
Figura III.15.- Modelado de ensamble de herramienta de implemento 75
Figura III.17.- Velocidad vs. Fuerza de tracción, por avances 77
Figura III.18.- Pantalla principal de ANSYS 78
Figura III.19.- Herramienta de implemento en ANSYS 80
Figura III.20.- Mallado de herramienta de implemento 81
Figura III.21.- Restricciones de movimiento en muñones de soportes 82
Figura III.22.- Aplicación de presión en área efectiva de empuje 82
Figura III.23.- Forma básica y deformada 83
Figura III.24.- Sumatoria de deformaciones en ejes x, y, z 83
Figura III.25.- Esfuerzo principal S1 en la herramienta de implemento 83
Figura III.26.- Esfuerzo principal S2 en la herramienta de implemento 84
Figura III.27.- Esfuerzo principal S3 en la herramienta de implemento 84
Figura III.28.- Esfuerzos por energía de distorsión máxima o Criterio de Von Mises 84
Figura III.29.- Esfuerzos en eje de accionamiento x 85
Figura III.30.- Esfuerzos en eje de accionamiento y 85
Figura III.31.- Esfuerzos en eje de accionamiento z 85
Capítulo IV Figura IV.1.- Efectos no producidos para Elastoplasticidad 92
Figura IV.2.- Modelos simplificados del comportamiento resistente del acero estructural 92
Figura IV.3.- Modelo elastoplástico para acero estructural 94
Figura IV.4.- Criterio de plastificación de Von Mises 98
Figura IV.5.- Comportamiento esfuerzo-deformación unitaria para descarga y carga 100
Figura V.6.- Superficie de cedencia inicial y subsecuente en endurecimiento cinemático 101
Figura IV.7.- Regla lineal de endurecimiento cinemático 101
Figura IV.8.- Esquema de un estado de esfuerzos residuales 103
Figura IV.9.- Cargas y restricciones en herramienta de implemento 104
Figura IV.10.- Herramienta de implemento modelada en CAD 106
Figura IV.12.- Importación del modelo por SAT a ANSYS 108
Figura IV.13.- Plasticidad con endurecimiento cinemático por Von Mises 109
Figura IV.14.- Mallado con elemento Tet 10 node187 110
Figura IV.15.- Restricción de grados de libertad en soportes 111
Figura IV.16.- Presión aplicada para primer paso de carga 111
Figura IV.17.- Modelo básico y deformado 112
Figura IV.18.- Sumatoria de deformaciones en ejes x, y, z 112
Figura IV.19.- Esfuerzo principal S1 en la herramienta de implemento 112
Figura IV.20.- Esfuerzo principal S2 en la herramienta de implemento 113
Figura IV.21.- Esfuerzo principal S3 en soporte de la herramienta de implemento 113
Figura IV.22.- Esfuerzos por energía de distorsión máxima o Criterio de Von Mises 113
Figura IV.23.- Esfuerzo cortante xy 114
Figura IV.24.- Esfuerzo cortante yz 114
Figura IV.25.- Esfuerzo cortante xz 114
Figura IV.26.- Deformación elástica 115
Figura IV.27.- Deformación plástica 115
Figura IV.28.- Esfuerzos residuales a la descarga 116
Capítulo V Figura V.1.- Soportes en herramienta de implemento para aplicación de cilindros hidráulicos 125
Figura V.2.- 1) Soporte de cilindro de inclinación, 2) Soporte de cilindro de levante 126
Figura V.3.- Soportes de cilindros hidráulicos, componentes críticos 127
Figura V.4.- Modelos de 1) soporte para inclinación y 2) soporte para levante, en CAD 128
Figura V.5.- ANSYS como software de simulación 129
Figura V.7.- Plasticidad con endurecimiento cinemático por Von Mises
para ambos casos 131
Figura V.8.- Mallado de soportes con elemento Tet 10 node187 131
Figura V.9.- Restricciones de movimiento en áreas de contacto directo con cilindros 132
Figura V.10.- Presiones aplicadas en áreas de contacto con cara anterior de la herramienta 133
Figura V.11.- Modelos básicos y deformados de los soportes 134
Figura V.12.- Sumatoria de deformaciones en ejes x, y, z en soportes 134
Figura V.13.- Esfuerzos principales S1 en soportes 134
Figura V.14.- Esfuerzo principal S2 en soportes 135
Figura V.15.- Esfuerzo principal S3 en soportes 135
Figura V.16.- Esfuerzos por energía de distorsión máxima o Criterio de Von Mises 135
Figura V.17.- Esfuerzos cortantes xy 136
Figura V.18.- Esfuerzos cortantes yz 136
Figura V.19.- Esfuerzo cortante xz 136
Figura V.20.- Deformaciones elásticas en soportes 137
Figura V.21.- Deformaciones plásticas en soportes 137
Índice de tablas Capítulo III
Tabla III.1.- Velocidades y fuerzas de tracción, por avances 77 Tabla III.2.- Especificaciones de la hoja 8SU 78 Capítulo IV
Simbología
2D Dos dimensiones
3D Tres dimensiones
CAD Computer aided design (Diseño asistido por computadora)
ε Deformación
E Módulo de elasticidad o de Young
F Fuerza
T Tensión
MEF Método del elemento finito
mm Milímetro
Pa Pascal
MPa Mega Pascal
GPa Giga Pascal
υ Relación de Poisson
N Newton
mph Millas por hora
SAT Standart ACIS Text
σ Esfuerzo
σmax Esfuerzo máximo
σu Esfuerzo último
σy Esfuerzo de cedencia
SAE Society of Automotive Engineers (Sociedad de Ingenieros Automotrices)
S1 Esfuerzo principal 1
S2 Esfuerzo principal 2
x Eje x
Introducción
El término maquinaria es de origen latino y hace referencia a todo lo que permite llevar adelante una determinada tarea, según el área en la que se esté trabajando. Antiguamente, el término era empleado para mencionar a todo arte que enseñaba las distintas etapas de la fabricación de las máquinas. En la actualidad, maquinaria no solo comprende a las máquinas en sí sino también a las piezas u otros elementos que formen parte de esa ejecución mayor. Es decir, que la combinación de piezas, máquinas, accesorios, novedades técnicas, todo eso da como resultado la maquinaria propiamente dicha.
CAPÍTULO I
I.1.- Maquinaria pesada
La maquinaria pesada, de acuerdo a la relación de peso/volumen, es decir, según su capacidad, es descrita poseedora de grandes proporciones geométricas comparado con vehículos livianos. Tienen peso y volumetría considerable; requiere de un operador capacitado, porque varía la operación según la maquinaria; se utiliza en movimientos de tierra de grandes obras de ingeniería civil y en obras de minería a cielo abierto [I.1].
Figura I.1.- Maquinaria pesada
I.2.- Antecedentes históricos de la maquinaria pesada
La historia del mejoramiento en el diseño de máquinas, que se dió principalmente en los Estados Unidos, lo que permite observar una fascinante ilustración del principio de cómo la forma sigue a la función [I.4]. La especialización del equipamiento de mover tierra, esencialmente como función de la distancia de acarreo, hizo aparecer a la niveladora, el
raspador, el bulldozer, la compactadora, el cargador y el ubicuo tractor agrícola. Éste proceso se dió más o menos alrededor de los 1880 y hasta el final de la primera guerra mundial [I.5]. Ya en esta época, todos habían adquirido su silueta familiar. El diseño elegante y utilitario del tractor de hacienda cambió poco en los últimos noventa años. Las primeras
niveladoras, raspadores y compactadoras eran de tracción animal. Sin embargo, el esfuerzo de tracción necesario requería de equipos de un tamaño excesivo (se mencionaron equipos de hasta dieciséis mulas). Entonces rápidamente el tractor y luego el asentador de vías fueron adaptados para poder jalarlos. Luego fueron motorizados. La adición de la cuchara del
bulldozer al tractor arrastrador, una innovación clave para desplazar tierra sobre cortas distancias, llegó un poco más tarde. En la medida en que la tracción por vapor no dominaba cómo era el caso en el Reino Unido, donde la indestructibilidad (las máquinas de vapor victorianas quedaron en servicio por medio siglo y más) era sin duda un freno al desarrollo de maquinaria relativamente ligera y ágil [I.6]. El motor a combustión interna fue adoptado rápidamente. Sin duda, el hecho de que fuera tan compacto y práctico estimuló mucho el diseño. A pesar de que no fuera una tarea trivial encender un motor a petróleo en temperaturas de congelamiento a principios de siglo, los procedimientos para arrancar una máquina de vapor ocupaban las primeras horas de cada día [I.7].
Después del desarrollo rápido de los treinta años antes de la primera guerra mundial, se consolidó el diseño en los años 20 y 30. El tamaño y la potencia de los motores incrementaron, los motores diesel se volvieron bastante universales, así como, los sistemas hidráulicos [I.2]. Al umbral de la segunda guerra mundial la maquinaria de construcción había llegado grosso modo a su forma actual.
I.2.1.- Niveladora
La primera niveladora reconocible apareció en 1886. Era naturalmente de tracción animal. Sin embargo, se ve asombrosamente similar a su descendiente [I.4].
Figura I.3.- Niveladora autopropulsada introducida por primera vez en 1909 I.2.2.- Raspador
El raspador Fresno era el ancestro de los monstruos actuales, los cuales pueden jalar 240 metros cúbicos por hora sobre una distancia de cien metros [I.5].
I.2.3.- Bulldozer
La historia del bulldozer empieza con el desarrollo del vehículo asentador de vías. El primero, que funcionaba a vapor, fue utilizado por primera vez en Crimea en 1854. Modelos tempranos tomaron cierto tiempo en encontrar su forma ideal y tomó su tiempo antes de que el manejo por control diferencial de la velocidad de la llanta de oruga se volviera generalizado y permitiera deshacerse del eje principal [I.2]. Se puede apreciar la manera en que el motor de combustión interna facilitó la unión de forma y función.
El término genérico Caterpillar (tractor de oruga) fue utilizado por primera vez en 1909. En 1914 su silueta era poco diferente de los actuales [I.2]. La provechosa unión del tractor de oruga y la hoja requirió cierto tiempo. El bullboard había sido desarrollado separadamente para la tracción animal. Los primeros bulldozers reconocibles aparecieron alrededor de 1922 y en los años siguientes sufrieron innovaciones intensivas en la montura y el control de la
cuchara para lograr máxima productividad. En 1930 el típico tractor de oruga se diferenciaba poco de los que se encuentran en la actualidad.
Figura I.5.- Tractor de oruga de término genérico Caterpillar
I.2.4.- Tractor agrícola
impedían que se reemplazara el caballo para varias faenas agrícolas cotidianas. Se utilizaban más generalmente como máquinas estacionarias para arado y trillado, a menudo alquilándose para uso diario. El tractor se acercó rápidamente de su diseño óptimo justo después de la primera guerra mundial, cuando el motor y el tren de conducción reemplazaron el chasis. Luego, la innovación consistió únicamente en cambios de detalles asociados con el incremento continuo de tamaño y potencia [I.4].
Figura I.6.- Uno de los primeros tractores asociados a actividades de agricultura I.2.5.- Compactadora
La Gran Bretaña lideraba en el desarrollo de compactadoras mecánicas, debido probablemente a la propagación rápida de los caminos de Macadam durante el siglo XIX [I.5]. Las primeras
apisonadoras, manufacturadas por Aveling and Porter, fueron utilizadas en 1867 [I.6].
Éstos eran, así como las máquinas de tracción a vapor, exportados en grandes cantidades hacia los Estados Unidos de América. El vapor permaneció una fuente corriente de energía durante gran parte del siglo XX [I.7]. Sin embargo, se precisaba gran cantidad de trabajo para levantar el vapor, regar la máquina y moverla. Además, apareció y se difundió rápidamente el rodillo vibrante, el cual resultaba también ser más portátil. Estos factores causaron su desaparición de las carreteras europeas en los años 50.
I.3.- Maquinaria pesada con herramienta de implemento
A finales de 1800 en América, el término destrucción se utiliza para describir el uso de la fuerza en empujar más o empujar a través de algún obstáculo. En el decenio de 1930 el término se utiliza para describir una máquina que se utiliza para empujar más a través de obstáculos. En términos generales, la máquina es un camión con placa de metal adjunta al frente. La placa que se conoce como la hoja, y se utiliza a sentir el peso de las capas del suelo o dos tallos de árboles cortados o empujados y otros obstáculos de distancia [I.2].
Figura I.8.- BulldozerCaterpillar, equipo con herramienta de implemento
Tal vez Caterpillar es el fabricante más conocido de equipos de maquinaria pesada, pero a lo largo de los años los ingenieros hacen los equipos necesarios para completar las operaciones a gran escala en la tierra, al igual que otras empresas, Komatsu, Fiat Allis, John Deere,
excavadoras más grandes y poderosas, y mucho más sofisticados. Algunas de las áreas de mejora, es que se incluyen motores más potentes, más fiables que se conducen en trenes, las vías superiores, criados y cabañas adjuntas, hidráulica y armas que permiten la precisión en el movimiento y control de la hoja. Todos estos acontecimientos han hecho indispensables la maquinaria comercial e incluso militar para la construcción.
I.3.1.- Especificaciones de equipos con herramienta de implemento I.3.1.1.- Potencia y peso del equipo
El peso y el equilibrio del equipo se encuentran entre los factores más importantes que deben tenerse en cuenta para elegir un equipo comercial [I.8]. Como cuestión de hechos, más caballos de fuerza y peso son necesarios para empujar la pesada carga de los altos niveles de producción. El peso de la hoja en la parte delantera del equipo debe ser compensado por tanto un equilibrio para contrarrestar el peso o un accesorio como un destripador o un torno, sobre todo cuando la empujadora se utilizará para terminar el trabajo. La selección de la cantidad adecuada de los caballos de fuerza del equipo, es una de las principales consideraciones en su adquisición. Si va a hacer una alta producción de trabajo, entonces el alto potencial de caballos es muy crítico. Si va a hacer más acabado, los caballos de fuerza ayudan a determinar la facilidad de dirección del equipo. La relación entre el peso y la potencia en caballos, también es importante. Si tiene demasiados caballos de fuerza para el peso de su equipo, la pista girará sin tracción y esto disminuye la productividad, así como, la vida de los compartimentos. Por otra parte, si los caballos de potencia del motor no son suficientes para el peso de la
empujadora y sus accesorios, su vehículo tendrá un momento difícil para medir las normas de productividad que son necesarios.
I.3.1.2.- Transmisiones
transmisiones hidrostáticas, sin embargo, tienen más probabilidades de estar contaminados, lo que los hace más pesados e indeseables para los equipos. El torque separador de las transmisiones son más caras y requieren más espacio que las transmisiones del convertidor de par, con lo que se los consideran la mayoría de las veces topadoras más grandes y pesadas. El directivo de un equipo es un elemento más de la especificación de que deben ser objeto de consideración. El freno de embrague tiene un sistema de dirección que le permitirá a la
empujadora su manejo cuando la pista de un lado está bloqueada y la que en el otro lado se encuentra activada. La diferencia en los sistemas de dirección, es que son más caras, pero mejores para poder girar y contrarrestar la rotación, lo que permite convertir a espacios más estrictos.
I.3.1.3.- Eficiencia de combustible [I.10]
Como en cualquier empresa comercial todos los costos de los elementos hay que tenerlos en cuenta al momento de elegir al equipo que sea adecuado para la actividad. Esto significa que el consumo de combustible debe ser de cierta consideración, sobre todo en los momentos en que el costo del combustible está aumentando rápidamente.
Figura I.9.- Presentaciones más comunes para combustible diesel y aceites Caterpillar
verdadero problema en el consumo de combustible es que si se opera en un equipo durante ocho horas en un día, se necesita aproximadamente 160 galones para el cambio. Si el depósito de combustible tiene 100 galones, se puede ver que tiene un problema logístico de mantenimiento de suficiente combustible para utilizar la máquina durante todo el día todos los días. En la selección de un equipo comercial que vaya a utilizar, tendrá que encontrar una fórmula para la cantidad de tierra movida o tareas realizadas en las ocho horas en una fábrica para determinar el consumo de combustible y los gastos de funcionamiento del equipo. Otra consideración es el costo de obtener el combustible para la ubicación del equipo en el trabajo, así como del almacenamiento de combustible en el sitio.
I.3.1.4.- Herramienta de implemento
La herramienta de implemento de un equipo, por supuesto, está instalada en la parte delantera del tractor. La función de la pala de metal pesado es empujar objetos, manipular obstáculos aproximados, y en algunos casos llevar a la arena, suciedad, o residuos [I.8].
Figura I.10.- El bulldozer más grande del mundo, Komatsu D575A-3 Super Dozer
I.4.- Retroexcavadora [I.11] I.4.1.- Definición
La retroexcavadora es una máquina en la cual la pluma baja y sube en cada operación; la
Figura I.11.- Dimensiones de maniobrabilidad de una retroexcavadora Case
Es fundamental que el transporte este organizado de manera tal que la retroexcavadora no espere a los medios de transporte. La capacidad de estos debe ser múltiplo de la cuchara, para evitar que una carga tenga que vaciarse en elementos distintos. Un buen sistema, es situar los camiones alternativamente a un lado y al otro lo más cerca posible del frente de ataque.
I.4.2.- Operaciones
• Excavar.
• Mejor máquina en excavación de taludes por debajo de su plano de sustentación.
• Cargar.
• Realizando giros según su eje vertical hacia el volquete que se ubica detrás de él.
• Girar.
• Desplazar.
• Movilizar y desmovilizar.
I.4.3.- Aplicaciones
• Excavación de zanjas con taludes verticales; roca dura disgregada previamente. La excavación se realiza por debajo del nivel de sustentación de la retroexcavadora sin importar el nivel freático.
• Excavación de canales.
• Limpieza y nivelación.
• Desmonte, carga y descarga de materiales.
• Relleno de cimientos y zanjas.
• Escarificar (ripper). I.4.4.- Tipos
-Según su accionamiento:
• Retroexcavadoras de cable o mecánicas.
• Retroexcavadoras hidráulicas. -Según el sistema de traslación:
• Retroexcavadoras a rieles.
• Retroexcavadoras montadas sobre cadenas (orugas).
El chasis está soportado por dos cadenas paralelas. Asimismo, los órganos de mando, igual que en la de neumáticos, se encuentran en la cabina del conductor.
• Retroexcavadoras montadas sobre ruedas o neumáticos.
El tren de rodadura está compuesto de ruedas de caucho, los órganos de mando de desplazamiento, dirección y frenos están en la cabina. La estabilidad se asegura con estabilizadores independientes de las ruedas.
I.4.4.1.- Retroexcavadora mixta
Este tipo de máquina es muy práctica dado que por un lado dispone de una pala ancha capaz de mover volúmenes considerables de tierras y por otro lado dispone de una pala con brazo
articulado muy práctica para la ejecución de zanjas, trabajos en taludes, escombros, etc. Unido todo ello al reducido volumen de la máquina y su diseño por lo cual es capaz de moverse en terrenos difíciles hace de esta máquina un modelo muy práctico e imprescindible para toda labor dedicada al movimiento de tierras y/o construcción. Es muy usual su utilización en el
I.4.4.2.- Retroexcavadora araña
Se trata de una retroexcavadora giratoria, dotada de dos ruedas y dos patas, de geometría variable y capaz de trabajar y moverse en pendientes muy inclinadas. Sus características le permiten una gran versatilidad de movimientos, siendo capaz de minimizar el impacto provocado por su desplazamiento a la vez que se optimiza el rendimiento del trabajo.
I.4.5. Aplicaciones
• En la agricultura para la construcción y mantenimiento de canales de drenaje o de riego.
• En la minería para exploraciones, explotaciones en ríos y otros.
• En la construcción de líneas de alta tensión, funiculares, hostales alpinos. I.4.6.- Transporte
La retroexcavadora puede ser transportada por el loy boy en caso de no poder transportarse sola, si es sobre ruedas y la obra se encuentra cerca puede no necesita de transporte.
I.4.7.- Mantenimiento
El motor debe estar parado para realizar el mantenimiento, si se requiere encendido para hacer ajustes el operador debe estar en la cabina para evitar el acceso de los controles a extraños.
-Preventivo:
• Protocolo de encendido.
• Capacidad del tanque de combustible.
• Prever posibles emplazamientos de tuberías de alcantarillado o gas.
• Si van a efectuarse soldaduras en la unidad, desconecte el alternador y baterías.
• Las baterías durante su carga o descarga producen hidrógeno y oxígeno, una mezcla muy explosiva, una chispa puede producir la detonación de los mismos.
-Predictivo:
• Indicadores de tablero.
-Correctivo:
• Reemplazo de grasa sucia por nueva.
• Cambio de combustible.
• Inspección visual alrededor de la máquina.
• Utilizar el aceite recomendado por el fabricante.
• En el caso de excavadoras sobre ruedas al inflar los neumáticos utilizar una manguera larga que permita situarse paralela a la rueda y fuera del alcance de posibles reventones.
I.4.8.- Proveedores y marcas
• Caterpillar.
• Volvo.
• Komatsu.
I.5.- Cargador frontal [I.12] I.5.1.- Definición
El cargador frontal es un equipo tractor, montado en orugas o en ruedas, que tiene un
cucharón de gran tamaño en su extremo frontal. Los cargadores son equipos de carga, acarreo y eventualmente excavación, en el caso de acarreo sólo se recomienda realizarlo en distancias cortas. El uso de cargadores da soluciones modernas a un problema de acarreo y carga de materiales, con la finalidad de reducir los costos y aumentar la producción.
En el caso de excavaciones con explosivos, la buena movilidad de este le permite moverse fuera del área de voladura rápidamente y con seguridad y antes de que el polvo de la explosión se disipe, el cargador puede estar recogiendo la roca regada y preparándose para la entrega del material. Los cucharones del cargador frontal varían en tamaño, desde 0.19 m3 hasta más de 19.1 m3 de capacidad, colmado. El tamaño del cucharón está estrictamente relacionado con el tamaño de la máquina.
I.5.2.- Operaciones
• Excavar.
• Cargar.
• Descargar.
• Acarrear o transportar.
I.5.3.- Aplicaciones
Se aplica en construcciones donde exista amplio espacio para maniobrar, se utiliza en toda obra que requiere de corte, carguío, acareo y descarga de medianos volúmenes de tierra.
• Carga de materiales.
• Mezcla de materiales.
• Excavación de terreno suelto ó blando.
• Apilado de material y carguío de material suelto.
• Deposita el material suelto, ya sea en una planta o en un lugar de desecho.
I.5.4.- Tipos
-De acuerdo a la forma de efectuar la descarga:
• Descarga frontal.
• Descarga lateral.
• Descarga trasera.
-De acuerdo a la forma de rodamiento:
• De neumáticos (bastidor rígido o articulado)
I.5.5.- Transporte
El cargador frontal se transporta por medio del low boy en caso de no poder transportarse sola, si esta sobre ruedas y la obra se encuentra cerca puede transportarse sola.
I.5.6.- Mantenimiento
• Protocolo de encendido.
• Punto de conexión de engrase.
• Capacidad del tanque de combustible.
• Plan de mantenimiento preventivo (cambio de aceite y filtros).
• Reemplazo de grasa sucia por nueva.
• La inspección visual alrededor del equipo.
• Cerciorarse que no hay espejos caídos, micas quebradas, cortes en los neumáticos,
balde en buen estado, vidrios trizados, plumillas en mal estado, niveles de aceite de motor, niveles de aceite hidráulico, niveles de aceite de la transmisión, nivel del agua del refrigerante del motor, baterías y su borne, corta corriente, fechas de vencimiento de extintores, despiche de los acumuladores de aire si es que tiene, tapas de los estanques, neumáticos y sus respectivas presiones recomendadas por el fabricante de los neumáticos.
I.5.7.- Proveedores y Marcas
• Komatsu
• Caterpillar
• Kawasaki
• Volvo
I.6.- Motoniveladora [I.13] I.6.1.- Definición
Puede imitar todos los tipos de tractores, pero su diferencia radica en que la motoniveladora
es más frágil, ya que no es capaz de aplicar la potencia de movimiento ni la de corte del
tractor. Debido a esto es más utilizada en tareas de acabado o trabajos de precisión. Las
motoniveladoras pueden ser arrastradas o automotrices, siendo esta última la más utilizada y se denomina motoniveladora (motograder).
I.6.2.- Operaciones
• Excavar o corte
• Cargar
• Acarreo
• Descarga o extendido
• Retorno
• Nivelación y excavación pequeña.
• Peinado de taludes.
• Construcción de cunetas.
• Extendido del material.
• Mezclado de material.
• Escarificado
Figura I.13.- Motoniveladora 170B New Holland I.6.3.- Esquema
Son equipos conformados por una cabina, un sistema de traslación por neumáticos, una hoja
presenta las siguientes características: aplicada en excavaciones (afinar corte) en terrenos blandos y semiduros, su capacidad está dada por la capacidad de corte y arrastre, lo mejor es realizar la operación de corte de arriba hacia abajo.
I.6.4.- Aplicaciones
• Nivelar.
• Esparcir el material descargado por los camiones y posterior nivelación.
• Conformar.
• Refino de explanadas.
• Mezclar material.
• Excavación, reperfilado y conservación de las cunetas en la tierra.
• Perfilado taludes.
• Mantener vías de tierra ó grava.
I.6.5.- Tipos
Las motoniveladoras se clasifican de la siguiente manera: - Según su peso y potencia.
La potencia puede variar de los 115 a los 225 HP, con velocidad de hasta 45 km/h. Las
motoniveladoras van equipadas con hasta 8 velocidades hacia delante y 6 detrás, con el fin de que sea el maquinista el que para cada trabajo elija la más idónea. Consiguen unos 40 km/h y unos 25 km/h atrás.
- Según el número de ruedas.
• De seis ruedas ó tres ejes.
• De cuatro ruedas ó dos ejes en modelos pequeños.
• Actualmente existen modelos más grandes de cuatro ejes.
I.6.6.- Transporte
I.6.7.- Mantenimiento
• Los equipos a ruedas deben llevar horómetro y odómetro.
• Necesita mantenimiento preventivo, predictivo y correctivo.
• Se debe requerir lista de proveedores dentro de la cuidad, departamento, país y paises vecinos y en último caso europeos, asiáticos, americanos.
I.6.8.- Proveedores y Marcas
• Caterpillar
• Komatsu
• Volvo
I.7.- Tractorbulldozer [I.8] I.7.1.- Definición
Máquina para movimiento de tierra con una gran potencia y robustez en su estructura, diseñado especialmente para el trabajo de corte (excavando) y al mismo tiempo empujando con la herramienta de implemento, hoja (transporte). En esta máquina son montados diversos equipos para poder ejecutar su trabajo, además debido a su gran potencia tiene la posibilidad de empujar o apoyar a otras máquinas cuando estas lo necesiten.
I.7.2.- Operaciones
• Excavar (a cielo abierto en grandes dimensiones).
• Acarreo en grandes dimensiones.
I.7.3.- Aplicaciones
• Grandes excavaciones a cielo abierto
• Excavación en banco de préstamo
• Limpieza y desbroce
• Apertura de vías
I.7.4.- Tipos
I.7.4.1.- Por el sistema de traslación -De orugas
• Su combustible mayormente es el diesel.
• Son equipos de mayor potencia.
• Chasis rígido.
• Velocidades máximas de entre 7 y 15 km/h.
• Potencias de entre 140 y 770 HP.
• Transmisiones mecánicas.
• Pesos en servicio de entre 13,5 y 68 toneladas.
• Capacidad de remontar pendientes de hasta 45º.
-De ruedas
• Producen menos compactación en el suelo, se usan más en agronomía.
• Chasis articulado con ángulos de 40º a 45º.
• Tracción en las cuatro ruedas.
• Velocidades máximas de desplazamiento de entre 16 y 60 km/h.
• Potencias de entre 170 y 820 HP.
• Transmisiones mecánicas o eléctricas.
I.7.4.2.- Por la forma en que mueve su herramienta de implemento
La herramienta de implemento, es decir, la hoja de empuje pueden realizar los siguientes movimientos:
• Inclinación lateral.
• Variación del ángulo de ataque de la hoja.
• Variación del ángulo de la hoja con respecto a la dirección de avance.
• Elevación y descenso de la hoja.
Existen diferentes tipos de herramienta de implemento, hojas:
• Hoja recta: Aconsejada para trabajos de empuje en general, especialmente en aquellos que requieren pasadas cortas o de media distancia. Es la de mayor versatilidad y capacidad para trabajos en roca.
• Hoja angulable: Diseñada para empujar el material lateralmente, para lo cual puede situarse en el bastidor de los brazos con ángulos de 25º a la derecha o izquierda con respecto a la dirección del tractor.
• Hoja de empuje amortiguado: Se trata de una hoja angosta, lo que le otorga mayor maniobrabilidad al tractor en su labor de empuje.
I.7.4.3.- Otra clasificación según Caterpillar [I.14]
• Hoja recta
• Hoja universal
• Hoja semiuniversal
• Hoja amortiguada
• Hoja angulable
Para obtener una mayor productividad los tractores deben ser equipados con la herramienta de implemento, hoja topadora adecuada, considerando los lugares y el tipo de trabajo que realizarán en la mayor parte de su vida útil. Básicamente se pueden citar los tipos siguientes:
I.7.5.- Herramienta de implemento, hoja recta “S” [I.14]
Tiene mejor adaptación debido a su diseño de "U" modificada y a su menor altura con referencia a la hoja universal "U", por lo cual puede maniobrar con mayor facilidad, logrando penetrar de 30 a 60 centímetros de acuerdo al modelo y tamaño del tractor, puede excavar suelos densos obteniendo mayores cargas en una amplia variedad de materiales.
Este tipo de hoja puede ajustarse dando una inclinación frontal de hasta 10 grados.
Figura I.15.- Herramienta de implemento, hoja recta “S”
I.7.6.- Herramienta de implemento, hoja angulable e inclinable a potencia “P” [I.14] La versatilidad es la característica principal de esta hoja al poder realizar una gran variedad de trabajos desde desarrollos de sitios hasta trabajo general de empuje y aplicaciones de servicio pesado. En algunas máquinas el ángulo y la inclinación se controlan con dos palancas, mientras que en otras máquinas se usa una palanca solamente.
La hoja VPAT (orientable e inclinable a potencia con cuchilla variable) puede inclinarse mecánicamente hacia adelante para obtener mejor penetración o para desmenuzar material pegajoso o hacia atrás para conseguir mayor productividad y facilitar el nivelado de acabado.
I.7.7.- Herramienta de implemento, hoja amortiguada "C" [I.14]
Figura I.16.- Herramienta de implemento, hoja amortiguada “C”
I.7.8.- Herramienta de implemento, hoja universal "U" [I.14]
Las amplias alas de esta hoja facilitan el empuje de grandes cargas a mayores distancias, se utilizan para modelos de tractores de mayor tamaño, principalmente efectúan trabajos para la habilitación de tierras, amontonamiento de materiales para los cargadores frontales, para la excavación de suelos livianos de poca densidad, etc. Relativamente tienen mayor longitud y altura, y una menor penetración que su equivalente en hoja recta "S".
I.7.9.- Herramienta de implemento, hoja semiuniversal “SU” [I.14]
La herramienta de implemento, hoja semiuniversal “SU” combina las mejores características de las hojas “S” y “U”. Tiene mayor capacidad por habérsele añadido alas cortas que incluyen sólo las cantoneras. Las alas mejoran la retención de la carga y permiten conservar la capacidad de penetrar y cargar con rapidez en materiales muy compactados y de trabajar con una gran variedad de materiales en aplicaciones de producción. Un cilindro de inclinación aumenta la productividad y versatilidad de esta hoja. Equipada con una plancha de empuje, es buena para cargar traíllas.
I.7.10.- Control de la herramienta de implemento [I.8]
El movimiento de la herramienta de implemento, hoja topadora puede estar controlado por un sistema de cables o por mandos hidráulicos: El control de cable tiene mayor simplicidad en su operación, su reparación es más sencilla y menos costosa, pero tiene menor precisión. Con el control hidráulico se puede ejercer una mayor presión sobre la cuchilla consiguiendo una mayor penetración, además se consigue un ajuste más preciso y uniforme en la posición de la
hoja.
I.7.11.- Accesorios Adicionales [I.8]
También puede contar en su parte trasera con un escarificador (ripper). Este accesorio permite excavar suelos duros que no se pueden remover con la hoja, tales como asfalto, pavimento viejo y superficies congeladas.
I.7.12. Transporte
El tractor bulldozer se transporta por medio del low boy en caso de no poder transportarse solo, si está sobre ruedas y la obra se encuentra cerca puede transportarse sola.
I.7.13.- Mantenimiento
-Mantenimiento en la zona de trabajo.
• Colocar la máquina en terreno llano. Bloquear las ruedas o las cadenas.
• Colocar la hoja apoyada en el suelo. Si se debe mantener la hoja levantada se inmovilizará adecuadamente.
• Desconectar la batería para impedir un arranque súbito de la máquina.
• No quedarse entre las ruedas o sobre las cadenas, bajo la hoja o los brazos.
• No colocar nunca una pieza metálica encima de los bornes de la batería.
• Utilizar un medidor de carga para verificar la batería.
• No utilizar nunca un encendedor o cerillos para ver dentro del motor.
• Aprender a utilizar los extintores.
• Conservar la máquina en buen estado de limpieza.
• Mantenimiento en taller.
• Antes de empezar las reparaciones, es conveniente limpiar la zona a reparar.
• No fumar.
• Antes de empezar las reparaciones, quitar la llave de contacto, bloquear la máquina y colocar letreros indicando que no se manipulen los mecanismos.
• Si varios mecánicos trabajan en la misma máquina, sus trabajos deberán ser coordinados y conocidos entre ellos.
• Dejar enfriar el motor antes de quitar el tapón del radiador.
• Bajar la presión del circuito hidráulico antes de quitar el tapón de vaciado, así mismo cuando se realice el vaciado del aceite vigilar que no esté quemado.
• Si se tienen que dejar elevados los brazos y la hoja, se procederá a su inmovilización antes de empezar el trabajo.
• Realizar la evacuación de los gases del tubo de escape directamente al exterior del local.
• Cuando se arregle la tensión de las correas del motor, éste estará parado.
• Antes de arrancar el motor, comprobar que no se haya dejado ninguna herramienta encima del mismo.
• Utilizar guantes y zapatos de seguridad.
-Examen de la máquina
• La máquina antes de empezar el trabajo, deberá ser examinada en todas sus partes.
• Los exámenes deben renovarse todas las veces que sean necesarias y fundamentalmente cuando haya habido un fallo en el material, en la máquina, en las instalaciones o los dispositivos de seguridad habiendo producido o no un accidente.
• Todos estos exámenes los realizará el encargado o personal competente designado por el mismo. El nombre y el cargo de esta persona se consignarán en un libro de registro de seguridad, el cual lo guardará el encargado.
I.7.14.- Proveedores y Marcas
• Caterpillar
• Volvo
• Case
• Komatsu
I.8.- Planteamiento del problema
De acuerdo al conocimiento contenido en este primer capítulo, visualizamos que existe una amplia gama de equipos de maquinaria pesada entre los que mayormente se ubican aquellos en los que el principal elemento de ejecución y sobre el que radica ampliamente el desempeño de éstos equipos de maquinaria pesada es la herramienta de implemento.
Con base a lo anterior, se tiene que debido a las condiciones asociadas al diseño de estas estructuras y a los trabajos desempeñados por los equipos de maquinaria pesada dotados de ésta herramienta se observa el caso específico del tractor bulldozer D8T Caterpillar equipado con herramienta de implemento, hoja semiuniversal “SU”, tal elemento, es empleado de manera indispensable para el desempeño de operación de tal equipo por lo que es de carácter vital, es decir, la herramienta de implemento de este equipo es requerida para prácticamente la totalidad de las ejecuciones desarrolladas por dicha maquinaria, de lo anterior surge la principal problemática en el desempeño de dicha estructura, al presentar falla este elemento estructural, quedando así imposibilitada para continuar ejecutando óptimamente sus funciones, repercutiendo y deshabilitando así al equipo de maquinaria pesada de manera trascendental, de tal manera y al grado de conducir al equipo a paros no programados o hasta paros absolutos de la producción, a su vez, ocasionando decremento en la productividad o total pérdida de productividad del equipo, así como al inducir a una merma en el valor comercial del equipo, en cuanto a su estatus de valor de arrendamiento, así como en su valor total de adquisición.
Así mismo, a partir del resultado obtenido, vislumbrar condiciones estructurales mayormente satisfactorias para tal herramienta de implemento con el enfocado objetivo de generar una composición estructural más óptima en el desempeño de este elemento estructural.
Por otro lado, un cimiento importante en la generación de la presente investigación es el hecho de no contar en México con referencias en el desarrollo de ningún tipo de estudio que lleve a cabo un análisis en el que se aporte conocimiento referente al comportamiento estructural de estos elementos. Por lo que, este análisis de falla de la herramienta de implemento permitirá a partir de su desarrollo el dar validez a la estructura, cuyo comportamiento estructural brinde un óptimo estatus de desempeño.
I.9.- Sumario
En este capítulo se abordan diversos avances en el diseño y funcionalidad de la maquinaria pesada efectuando una reseña histórica a partir del momento de sus primeras apariciones por tracción animal hasta los complejos desarrollos en la actualidad, a partir de tecnologías como la electrohidráulica. Los anteriores desarrollos enfocados principalmente a dar solución óptima a las diversas necesidades de las sociedades humanas en su carrera conseguir mayores grados de civilización a través del tiempo.
Con la información recabada y plasmada en este capítulo se pretende recopilar los conocimientos requeridos para la concepción de la maquinaria pesada, las diversas variantes desarrolladas, a partir, de requerimientos deseados, así como los elementos integrales de estos
equipos, entre los que posicionamos específicamente a la herramienta de implemento, como uno de los principales componentes en ejecución.
I.10.- Referencias
1.- Orlemann, E. C., Caterpillar Chronicle: The History of the World's Greatest Earthmovers, Ed. Osceola, WI: MBI, pp. 168, 2000.
2.- Payne, W. A., The Story of the Caterpillar Tractor, Ed. Stockton, CA.; University of the Pacific, pp. 102, 1982.
3.- Wendel, C. H., The Allis-Chalmers Story, Ed. Allis-Chalmers Corporation, pp. 372, 1988. 4.- Stewart, H., Chronicle of an Innovator in Construction and Agricultural Equipment, Ed.
Macmillan, pp. 269, 1976.
5.- Wendel, C. H., 150 Years of J. I. Case, Ed. Motorbooks International, pp. 336, 1994. 6.- Zinman, M., The History of the Decline and Fall of the Raterpillar Tractor Company: A
Modern Business Saga, Ed. Haydn Foundation, pp. 231, 1986.
7.- Broehl, Jr. W. G., John Deere's Company : A History of Deere & Company and Its Times, Ed. J. Deere Company, pp. 117, 1984.
8.- Caterpillar Inc., Manual de Operación y Mantenimiento Tractor D4. S.e, U.S.A.; S.A., Ed. Caterpillar Inc., pp. 7, 2010.
9.- Intecap, Módulo Transmisiones Nivel Operativo, Especialidad Mecánico de Maquinaria Pesada, Ed. Intecap, pp. 13, 1998.
10.- Caterpillar Inc., El Refrigerante y su Motor, Ed. Caterpillar Inc., pp. 31, 2008.
11.- Caterpillar Inc., Manual de Operación y Mantenimiento Retroexcavadora 416E, S.e.; U.S.A.; S.A., Ed. Caterpillar Inc., pp. 17, 2010.
12.- Caterpillar Inc., Manual de Operación y Mantenimiento Cargador Frontal 980F, S.e.; U.S.A.; S.A.,Ed. Caterpillar Inc., pp. 5, 2009.
13.- Caterpillar Inc., Manual de Operación y Mantenimiento Motoniveladora 130G. S.e.; U.S.A.; S.A., Ed. Caterpillar Inc., pp. 6, 2010.