INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA INGENIERÍA EN CONTROL Y AUTOMATIZACIÓN
DISEÑO Y CONSTRUCCIÓN DE UN EXOESQUELETO EN
BRAZO PARA AMPLIFICAR FUERZA.
TESIS
QUE PARA OBTENER EL TÍTULO DE
INGENÍERO EN CONTROL Y AUTOMATIZACIÓN
P R E S E N T A
EHECATL RICARDO VICTORIA TOBON
Agradecimientos
Índice general
Índice de figuras y tablas
VI
Resumen
IX
Objetivo General
X
Alcance
XII
Justificación
XII
Introducción
XIII
Capítulo 1
1
1.1 Control
2
1.2 Automatización
7
1.2.1 Tipos de automatización
7
1.3 Robótica
8
1.3.1 Clasificación de robots
10
1.4 Antecedentes generales a los exoesqueletos
15
1.5 Planteamiento del problema
26
1.6 Hipótesis
26
Capítulo 2
27
2.1 Identificación del sistema
28
2.2 Actuadores eléctricos
33
2.2.1 Método de control, puente h
37
2.3 Sensor de posicionamiento, acelerómetro
39
2.4 PIC’s
y lenguaje de programación
45
Capítulo 3
53
3.1 Parámetros de diseño mecánico
54
3.1.1 Diseño de las piezas estructurales
55
3.2 Selección de los actuadores
62
3.2.1. Ensamble de piezas
65
Capítulo 4
72
4.3.2 Adquisición de los valores de los sensores
91
4.3.3 Monitoreo de las variables de aceleración
94
Capítulo 5
100
5.1 Selección de material
101
5.1.1 Aluminio
101
5.1.2 Acero
103
5.1.3 Titanio
105
5.1.4. Nylamid
109
5.1.5. Selección final
111
Capítulo 6
115
6.1 Material asignado
116
6.2 Análisis de la estructura
117
6.3 Objetivos cumplidos
118
Conclusiones y recomendaciones para trabajos futuros
129
Anexo A
135
Tablas de propiedades y presentaciones del Nylamid
136
Anexo B
139
Dibujo estructural de las piezas diseñadas
140
Índice de figuras y tablas
1.1 Esquema simple de un sistema de control 2
1.2 Representación sencilla de un sistema 2
1.3 Representación sencilla de un sistema de control 3
1.4 Representación de un sistema de lazo abierto 4
1.5 Sistema de lazo cerrado 5
1.6 Elementos de un lazo de control 6
1.7 Configuraciones básicas de los robots 14
1.8 Interacción entre el humano, el exoesqueleto y la carga 16
1.9 Representación esquemática básica de un brazo exoesqueleto 17
1.10 Exoesqueleto Rex para personas con discapacidad en las piernas 18
1.11 Exoesqueleto Hulc para el ejército de EE.UU 19
1.12 Traje exoesqueleto HAL-5 para el desarrollo de fuerza 20
1.13 Exoesqueleto XOS en su primera etapa 21
1.14 Exoesqueleto XOS-2 en su segunda etapa 22
1.15 Traje exoesqueleto Rewalk para personas con paraplejía 23
1.16 Exoesqueleto Power Loader con fines para la industria 24
1.17 Exoesqueleto Power Loader Light para el aumento de potencia en las piernas 25
2.1 Definición de segmentos del modelo del brazo humano 28
2.2 Modelo biomecánico del brazo humano 29
2.3 Articulaciones del brazo humano 30
2.4 Movimiento del hombro y ejes relacionados 30
2.5 Movimiento del brazo en el espacio 32
2.6 Motor eléctrico montado en válvula 34
2.7 Figura esquemática simplificada de un colector seccionado en dos partes 35
2.8 Figura esquemática de conexión de un motor de cd 36
2.9 Circuito esquemático simplificado de un puente h 37
2.10 Ciclos de funcionamiento y frenado del puente h 38
2.11 Circuito de control para un puente h 39
2.12 Vista de un engrane MEMS con microscopio 40
2.13 Mecanismo construido bajo tecnología MEMS 41
2.14 Movimientos físicos relacionados con aceleración 41
2.13 Tarjeta electrónica con acelerómetro 43
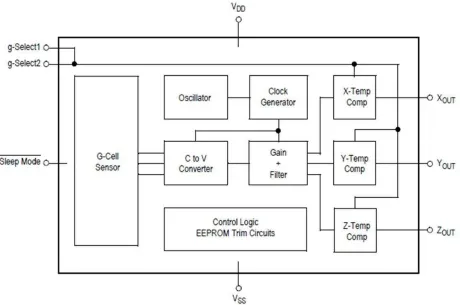
2.14 Diagrama de bloques del funcionamiento del acelerómetro 44
3.1 Modelo del exoesqueleto simplificado 54
3.2 Modelo del exoesqueleto reasignando los grados de libertad 55
3.3 Modelo mecánico del exoesqueleto 55
3.4 (Hombro, parte A) 56
3.5 (Hombro, parte B) 57
3.6 (Brazo y antebrazo) 58
3.7 (Codo, parte A) 59
3.8 (Codo, parte B) 60
3.10 Forma física del motor de C.D 62
3.11 Características del motor de C.D 62
3.12 Motor de C.D. sin la tapa de la cubierta y el engrane 63
3.13 Engrane del motor con bujes 64
3.14 Engrane del motor con su acoplamiento 64
3.15 Engrane del motor acoplado 64
3.16 Motor con acoplamiento 65
3.17 Ensamble de la pieza 1 (hombro, parte A) 65
3.18 Movimiento de la pieza 1 (hombro, parte A) 66
3.19 Ensamble de la pieza 2 (hombro, parte B) 66
3.20 Hombro finalizado 67
3.21 Ensamble de la pieza 3 (antebrazo) 67
3.22 Movimiento de la pieza 3 (antebrazo) 68
3.23 Codo terminado 68
3.24 Grado de libertad del codo 69
3.26 Movimientos del antebrazo 69
3.25 Antebrazo terminado 70
3.27 Antebrazo completo 70
3.28 Exoesqueleto terminado 71
4.1 Forma física del relevador 73
4.2 Diagrama de conexión para un puente H con relevadores 74
4.3 Conmutación hacia el sentido contrario para la activación del motor 74
4.4 Conmutación hacia un sentido para la activación del motor 75
4.5 Circuito para activar la bobina del relevador con driver L293D 75
4.6 Circuito de conexión del PIC16F628A 76
4.7 Conexión del MC7805 77
4.8 Circuito de conexión del MC7805 para la alimentación del PIC16F628A 77
4.9 Circuito de disparo para la activación del driver 78
4.10 Circuito de disparo para la activación de relevador 78
4.11 Imagen realista del puente H terminado 79
4.12 Imagen de las pistas del puente H terminado 80
4.13 Circuito electrónico de conexión del acelerómetro 81
4.14 Circuito de conexión del PIC12F683 82
4.15 Circuito de conexión del PIC12F683 con el sensor 82
4.16 Circuito electrónico de comparación con acelerómetros y pic12F683 83
4.17 Circuito electrónico para el control de los actuadores 84
4.18 Circuito de conexión para el PIC 18F2550 85
4.19 Circuito de conexión para el puerto USB 85
4.20 Circuito de conexión para el puerto USB con los acelerómetros 86
4.21 Programa para leer los valores de los acelerómetros 87
4.22 Rutina del programa del puente H 88
4.23 Rutina del programa para la adquisición de señales 91
4.24 Rutina del programa para la adquisición de señales y envío vía USB 94
6.1 Grados de libertad asignados 116
6.2 Grados de libertad del exoesqueleto 117
6.3 Von Mises pieza 1 (Hombro, parte A) 119
6.4 Desplazamiento de fuerzas, pieza 1 (Hombro, parte A) 120
6.5 Von Mises, Pieza 2 (Hombro, parte B) 121
6.6 Desplazamiento de fuerzas, Pieza 2 (Hombro, parte B) 122
6.7 Von Mises, Pieza 3 (Brazo y antebrazo) 123
6.8 Desplazamiento de fuerzas, Pieza 3 (Brazo y antebrazo) 124
6.9 Von Mises, Pieza 4 (Codo, parte A) 125
6.10 Desplazamiento de fuerzas, Pieza 4 (Codo, parte A) 126
6.11 Von Mises, Pieza 6 (Antebrazo) 127
6.12 Desplazamiento de fuerzas, Pieza 6 (Antebrazo) 128
7.1 Servomotor HITEC analógico 130
7.2 Servomotor HITEC digital 130
7.3 Control para servomotores micro maestro 6CH 131
7.4 Control para servomotores mini maestro 12CH 131
7.5 Símbolo del transistor tipo Mosfet 133
Resumen
El desarrollo de tecnología que facilite las tareas de cargar o llevar objetos pesados tanto en industria como en hogares es eminente, muchos problemas de lesiones se deben a este tipo de tareas, la creación de un mecanismo articulado denominado exoesqueleto que ayude a los humanos a realizar este tipo de trabajos es una de las alternativas al no poder contar con máquinas como montacargas en donde el costo y el espacio requeridos no son suficientes.
Este trabajo forma parte del desarrollo mecánico y electrónico en el prototipo de un exoesqueleto con 4 grados de libertad accionado por actuadores eléctricos.
El trabajo se divide en 6 capítulos, comenzando por un marco de referencia, en donde se proporciona información acerca de los exoesqueletos y proyectos actuales de investigación, en los cuales, grandes y reconocidas empresas se encuentran participando.
También se brindan conceptos fundamentales para dar un amplio panorama y un mejor entendimiento al proyecto propuesto en este trabajo.
Una vez entendida la primera parte, en los capítulos siguientes, la información es más centralizada sobre el proyecto que se planea realizar, como lo es, el modelo mecánico del brazo exoesqueleto, una comparación entre diversos materiales con los cuales se puede realizar la estructura, diseño y ensamblado de las piezas estructurales, simulación de esfuerzos para comprobar la efectividad de la estructura, la propuesta de los actuadores para el movimiento de las articulaciones y del control electrónico para la activación de los mismos, los resultados obtenidos al finalizar el proyecto y las recomendaciones para trabajos futuros del mismo, una vez obtenidos los resultados.
Al final del trabajo, se proporcionan anexos en donde se muestran los dibujos estructurales de cada una de las piezas que se diseñaron, programas para el control de los actuadores y tablas de especificaciones del material que al final se seleccionó.
Objetivo General
Desarrollo de un brazo exoesqueleto de 4 grados de libertad con la ayuda del software "Solidworks" para el diseño de las piezas estructurales con las cuales se realizará el ensamble de una estructura mecánica accionada por actuadores eléctricos, con la finalidad de ayudar al ser humano a levantar objetos pesados.
Para llegar al objetivo general se deben cumplir con los siguientes objetivos específicos:
Proporcionar el desarrollo histórico de los exoesqueletos.
Dar los fundamentos teóricos necesarios para la comprensión del proyecto.
Definir el modelo de la estructura.
Definir los fundamentos electrónicos para el desarrollo del control.
Determinar el material para el diseño estructural.
Diseñar cada una de las piezas estructurales y someterlas a simulación de esfuerzos para comprobar su buen comportamiento, todo esto con ayuda del
programa “Solidworks”.
Determinar los parámetros de los actuadores.
Realizar el ensamble correspondiente de las piezas diseñadas ya una vez comprobada su efectividad.
Diseñar la parte electrónica para el control de los actuadores.
Realizar la estructura real una vez comprobado el funcionamiento teórico.
Alcance
Este trabajo es una propuesta mecánica para el desarrollo de un nuevo exoesqueleto, con el que se abre camino en los nuevos avances de la robótica para la implementación de mecanismos estructurales que ayuden al humano en gran medida, a realizar tareas de cargar o llevar objetos pesados de un lugar a otro e incluso puede formar parte en la rehabilitación de brazos y piernas.
Con la propuesta de una nueva estructura, se crea un área de investigación en donde alumnos, profesores y desarrolladores puedan contribuir para el mejoramiento de la estructura, logrando ganar terreno en el área comercial y acercándolo al ámbito industrial que es el campo al cual se desea llegar.
Justificación
Actualmente existen pocas propuestas serias de desarrollo en aplicaciones robóticas, como lo son los exoesqueletos.
Grandes compañías invierten varios millones y años de investigación en el desarrollo de prototipos con el fin de comercializarlos o para su uso exclusivo, como lo es el caso de E.U. que el desarrollo de sus productos es para fines militares y uso exclusivo de sus tropas.
Las principales razones de encontrar poco material de investigación son la enorme cantidad de tiempo e inversión de grandes cantidades de dinero que estos tipos de proyectos requieren. Para las compañías, resulta poco práctico invertir enormes sumas en prototipos que tal vez nunca vean la luz del sol y les resulta poco ventajoso tener propuestas a largo plazo que no tengan remuneración.
Compañías como Panasonic y DARPA son algunas que le apuestan a este tipo de proyectos, en los cuales, colaboran desarrolladores de toda índole, incluso profesores y estudiantes toman parte contribuyendo en el mejoramiento de prototipos que las mismas compañías dejan abiertos para obtener colaboración alguna.
Si bien, grandes compañías que han invertido enormes sumas de dinero y han lanzado al mercado productos que muy pocas personas pueden adquirir por sus costos exorbitantes, incluso aquellos para el sector que han sido destinados, como lo es la rehabilitación, más aun sabiendo que este tipo de personas son las que más carecen de recursos económicos, el fin principal de este proyecto es desarrollar una herramienta de investigación de bajo presupuesto con el propósito de integrarlo a futuro en el ámbito laboral.
En las grandes industrias existe el problema, principalmente para los obreros, de lidiar con objetos, ya sean máquinas, herramientas u otro tipo de materiales de alto peso. Comúnmente tienen que trasladarlos de un lugar a otro, montarlos en algún otro sitio o simplemente trabajar con éste tipo de herramientas. Existen máquinas como montacargas y algunos otros dispositivos que facilitan éstas tareas, sin embargo, en ciertos lugares y áreas de trabajo, éstos resultan ineficientes por el espacio que se tiene y en algunos casos, hasta estorbosos para los operarios dependiendo del tipo de actividades que se realicen.
Se propone la creación de brazos exoesqueletos externos que ayuden al ser humano a realizar tareas de levantamiento de cargas pesadas sin quitar la movilidad a los operarios, además de desarrollar un prototipo de bajo costo con el propósito de llegar al personal de las industrias que requieran éste tipo de ayuda.
Introducción
En este trabajo se engloban conocimientos de diversas disciplinas aprendidas a lo largo de toda la carrera de control y automatización, dentro de las cuales hacen mayor presencia las materias de control, modelado, mecanismos, programación, electrónica, diseño, actuadores, manipuladores industriales y los sistemas embebidos.
La parte central de este proyecto es la propuesta de un diseño estructural y mecánico de un brazo exoesqueleto de 4 grados de libertad. Antes que nada, se hace una recapitulación bibliográfica de los antecedentes generales de los exoesqueletos, se describe lo que son, para que sirven, que beneficios traen, así como prototipos actuales lanzados por diferentes compañías.
Posteriormente se dan conceptos necesarios para brindar un mejor entendimiento y dar entrada al desarrollo del proyecto. Parte fundamental, es la adecuada selección de un buen material, si bien se mencionó en la justificación del presente proyecto, el material es lo que hará que el prototipo tenga un bajo costo, alto rendimiento y buena funcionalidad mecánica.
La identificación del sistema se hace analizando los grados de libertad que tiene el brazo humano, los movimientos que hace y cómo los hace, en base a esto se genera un modelo mecánico que se adapte a las condiciones y que reproduzca las acciones generadas por el humano.
El diseño y construcción se lleva a cabo con la ayuda del programa “Solidwroks”. Éste
programa reproduce las condiciones reales, simulando los pros y los contras que se puedan encontrar cuando se realice. Además, es una herramienta muy práctica puesto que se realizan simulaciones de esfuerzos con lo que se comprueba la efectividad de la estructura.
Para definir la estructura del exoesqueleto, se consideran los siguientes puntos:
Se define la cantidad de articulaciones que compondrán la estructura.
Se realiza el modelo mecánico de la estructura.
Se establecen dimensiones iniciales.
Realizar el diseño por software de las piezas.
Se proponen los actuadores para las articulaciones.
Se define en qué punto y como se colocarán los actuadores para cada una de las articulaciones.
Dar ensamble al exoesqueleto.
Proponer el control electrónico para los actuadores.
Diseñar la parte electrónica para el control de los actuadores.
Realizando la simulación de esfuerzos de cada una de las piezas, se analizan puntos críticos que se puedan tener, en caso de que alguna contenga posibles fracturas, se rediseña y optimiza para eliminar riesgos.
CAPITULO 1
Marco de referencia
1.1
Control
1.2
Automatización
1.2.1 Tipos de automatización
1.3 Robótica
1.3.1 Clasificación de robots
1.4 Antecedentes generales a los exoesqueletos
1.5 Planteamiento del problema
1.1
Control
Desempeña una función esencial en la ingeniería, aporta los medios para obtener un desempeño óptimo de los sistemas dinámicos, mejora la productividad y para evaluar posibles fallas del proceso, corregirlos y eliminar errores. Así, el [5] Ing. Raúl Villa (2008), define el concepto de control como:
“La manipulación indirecta de las magnitudes de un sistema llamado planta a través de otro denominado control”, como se observa en la figura 1.1.
Fig. 1.1 Esquema simple de un sistema de control, [5] Ing. Raúl Villa (2008).
Así, el control tiene partes fundamentales, las cuales, [8] Eloy Anguiano Rey (2008) enlista a continuación:
Sistema: es la combinación de componentes que actúan conjuntamente y
cumplen un determinado objetivo, figura 1.2.
Fig. 1.2 Representación sencilla de un sistema, [8] Eloy Anguiano Rey (2008)
Variable de entrada: es una variable del sistema tal que una modificación de su
magnitud o condición puede alterar el estado del sistema.
Variable de salida: es una variable del sistema cuya magnitud o condición se
mide.
Perturbación: es una señal que tiende a afectar el valor de la salida de un
sistema. Si la perturbación se genera dentro del sistema se la denomina interna, mientras que una perturbación externa se genera fuera del sistema y constituye una entrada.
Variable controlada: Es la cantidad o condición que se mide o controla.
Variable manipulada: Es la cantidad o condición que el control modifica para
Controlar: Medir la variable controlada y modificar la variable manipulada
para limitar lo posible la desviación del valor medido respecto al valor deseado.
Planta: Cualquier objeto físico que se va a controlar. Proceso: Cualquier operación que se va a controlar.
Control realimentado: Operación que tiende a eliminar el efecto de las
perturbaciones.
Sistemas de control:
Es un conjunto de dispositivos que actúan entre sí para lograr un objetivo de control, como se muestra en la figura 1.3.
Fig. 1.3 Representación sencilla de un sistema de control, [8] Eloy Anguiano Rey (2008).
Los sistemas de control, que son organizaciones de equipos e instrumentos (lo físico), combinados con procedimientos mentales o algorítmicos (lo inteligente) trabajan en torno a propósitos previamente establecidos (lo deseado).
Las funciones principales de un sistema de control son la observación del proceso y sus variables a automatizar, el acondicionamiento de las variables y parámetros observados, el procesamiento de ésta información y su comparación con lo deseado y, posteriormente, la acción de corrección de los elementos terminales para conseguir lo deseado.
Los sistemas de control se manifiestan desde un sistema muy simple (univariable) hasta uno altamente complejo (multivariable, multiprocesamiento y/o multitarea). Este grado de complejidad se dará según el tipo de instrumentación a usar, el tipo de procesamiento y los alcances que se desea dar a la automatización. Estos alcances dependerán de situaciones como, por ejemplo:
Supervisión y control de la producción (integración global del sistema de producción).
Control de procesos industriales (manejo y regulación de variables del sistema).
Sistemas de seguridad en la producción (alarmas del sistema, protección de personas y dispositivos dentro del proceso productivo).
Los siguientes términos fueron extraídos de [28] Katsuhiko Ogata (3a. Ed.):
Sistemas de control realimentados:
Es un sistema que mantiene una relación determinada entre la salida y la entrada de referencia, comparándolas y usando el error (diferencia) como medio de control.
Sistemas de lazo abierto:
Sistemas en los cuales la salida no afecta la acción de control, en otras palabras, en un sistema de control en lazo abierto no se mide la salida ni se realimenta para compararla con la entrada.
En cualquier sistema de control en lazo abierto, la salida no se compara con la entrada de referencia. Por tanto, a cada entrada de referencia le corresponde una condición operativa fija; como resultado, la precisión del sistema depende de la calibración.
Ante la presencia de perturbaciones, un sistema de control en lazo abierto no realiza la tarea deseada.
Como se muestra en la figura 1.4, las características de un sistema de lazo abierto está dado por:
No existe realimentación de comportamiento de la planta.
[image:18.612.146.473.421.691.2] El conjunto sistema de control más accionamientos convierte y amplifica las señales de consigna en las acciones de control.
Sistemas de lazo cerrado (sistema automático de control):
Se alimenta al controlador la señal de error de actuación, que es la diferencia entre la señal de entrada y la señal de realimentación (que puede ser la señal de salida misma o una función de la señal de salida y sus derivadas y/o integrales), a fin de reducir el error y llevar la salida del sistema a un valor conveniente.
El término control en lazo cerrado siempre implica el uso de una acción de control realimentado para reducir el error del sistema.
Sus características de muestran en la figura 1.5, las cuales son:
Se realimentan determinadas variables de la planta.
Uso de sensores e interfaces (acondicionadores de señal).
El autómata programable cumple las funciones del sistema de control y en forma total o parcial la interface con el proceso.
Señales de consigna + realimentadas = entradas del controlador.
[image:19.612.127.486.331.543.2] Señales de control = salidas del controlador.
Fig. 1.5 Sistema de lazo cerrado, [8] Eloy Anguiano Rey (2008).
Elementos de un lazo de control:
Éstos se enlistan a continuación, mostrados también en la figura 1.6:
Sistema a controlar.
Controlador.
Actuador (puede incluirse en el sistema a controlar).
Fig. 1.6 Elementos de un lazo de control, [8] Eloy Anguiano Rey (2008).
Funciones de un lazo de control:
Medir el valor de la variable controlada (medida y transmisión).
Detectar el error y generar una acción de control (decisión).
Usar la acción de control para manipular alguna variable en el proceso de modo que tienda a reducir el error (manipulación).
Ventajas y desventajas de los lazos de control:
[8] Eloy Anguiano Rey (2008) cita las ventajas y desventajas de los lazos de control, como
se muestran a continuación:
Ventajas del lazo cerrado:
Poco sensible a perturbaciones externas y a las variaciones internas de los parámetros del sistema.
Se pueden usar componentes poco precisos y baratos.
Ventajas del lazo abierto:
Es mucho más sencillo crear un sistema estable.
Desventajas del lazo cerrado:
El exceso de corrección puede introducir oscilaciones en el sistema (inestabilidad).
Desventajas del lazo abierto:
Necesita componentes muy precisos y caros.
Es muy sensible a perturbaciones externas.
En forma general el sistema de control consta de:
Unidad de control.
Accionamientos o actuadores.
Sensores.
1.2
Automatización
Es un sistema donde se trasfieren tareas de producción, realizadas habitualmente por operadores humanos a un conjunto de elementos tecnológicos.
El término automatización viene de la palabra griega “auto” y significa la ejecución por
medios propios de un proceso, en el que materia, información o energía es cambiado o transformado, la siguiente información se extrajo de [30] mecatronica-portal (2009):
Automatización según la Merriam Webster (biblioteca británica):
La técnica de hacer que un sistema opere automáticamente.
El estado de ser operado automáticamente.
Operación automáticamente controlada de un sistema mediante dispositivos mecánicos o electrónicos para observación, esfuerzo y decisión.
Automatización según la RAE (real academia española):
Acción y efecto de aplicar lo perteneciente o relativo a un instrumento o aparato que encierra dentro de sí el mecanismo que le imprime determinados movimientos a un proceso, un dispositivo, etc., así se enlista a continuación:
Automatización: acción y efecto de automatizar.
Automatizar: aplicar la automática a un proceso, un dispositivo, etc. Automática: perteneciente o relativo al autómata.
Autómata: instrumento o aparato que encierra dentro de sí el mecanismo que le
imprime determinados movimientos.
Automatización según DIN 19 233:
Emplear medios artificiales, de tal forma que un proceso transcurra de forma automática. En una planta, esto significa equiparla con autómatas de tal forma que trabaje automáticamente. Un autómata es un sistema artificial, que sigue un programa de forma
propia o automática. Gracias al programa el sistema debe tomar decisiones basado en las entradas y el estado del sistema, para de esta forma cumplir con tareas asignadas.
1.2.1
Tipos de automatización
La automatización es una tecnología que está relacionada con el empleo de sistemas mecánicos, electrónicos, eléctricos y de cómputo para la operación y control de la producción, así lo cita el [1] Dr. Alejandro Tonatiu (2010).
Se emplea usualmente en:
Líneas de transferencia.
Máquinas de montaje mecanizado.
Sistemas de control de realimentación (aplicados a los procesos industriales).
Robots.
A su vez existen diferentes tipos de automatización las cuales son:
Automatización fija
Volumen de producción muy alto.
Equipos especializados en el proceso.
Operación de mecanizado.
Automatización programable
Volumen de producción moderado.
Diversidad de productos a obtener.
Equipo diseñado para diversas configuraciones.
Automatización flexible
Sistemas de producción integrados por computadora.
Diversas estaciones de trabajo.
Almacenamiento y manejo de materiales.
1.3
Robótica
Es una rama de la tecnología, que estudia el diseño y construcción de máquinas capaces de desempeñar tareas repetitivas o peligrosas para el ser humano, así lo cita [2] Dr. Omar Sánchez Pérez (2007), de cuyo artículo se extraen las siguientes definiciones:
Robot:
Dispositivo hecho por el hombre con una anatomía y un sistema de retroalimentación inteligente sin necesidad de estar bajo la acción directa del control humano.
Robot, por la Asociación francesa de normalización (AFNOR):
Manipulador automático o servo controlado, reprogramable, polivalente, capaz de posicionar y orientar piezas, útiles o dispositivos especiales, siguiendo trayectorias variables reprogramables, para la ejecución de tareas variadas. Por lo regular tiene la forma de uno o varios brazos terminados en una muñeca. Su unidad de control incluye un dispositivo de memoria y ocasionalmente de percepción del entorno. Normalmente su uso es la de realizar una tarea de manera cíclica, pudiéndose adaptar a otra sin cambios permanentes en su material.
Robot industrial:
Existen ciertas dificultades a la hora de establecer una definición formal de lo que es un robot industrial. La primera de ellas surge de la diferencia conceptual entre el mercado japonés y el euro-americano de lo que es un robot y lo que es un manipulador.
más restrictivo, exigiendo una mayor complejidad, sobre todo en lo relativo al control. En segundo lugar, y centrándose ya en el concepto occidental, aunque existe una idea común acerca de lo que es un robot industrial, no es fácil ponerse de acuerdo a la hora de establecer una definición formal.
Además, la evolución de la robótica ha ido obligando a diferentes actualizaciones de su definición:
Asociación de Industrias Robóticas (RIA):
Un robot industrial es un manipulador multifuncional reprogramable, capaz de mover materias, piezas, herramientas, o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas.
Asociación Francesa de Normalización (AFNOR):
Define primero el manipulador y, basándose en dicha definición, al robot, los cuales se citan a continuación:
Manipulador: mecanismo formado generalmente por elementos en serie, articulados entre
sí, destinado al agarre y desplazamiento de objetos. Es multifuncional y puede ser gobernado directamente por un operador humano o mediante dispositivo lógico.
Robot: manipulador automático servo-controlado, reprogramable, polivalente, capaz de
posicionar y orientar piezas útiles o dispositivos especiales, siguiendo trayectorias variables reprogramables, para la ejecución de tareas variadas. Normalmente tiene la forma de uno o varios brazos terminados en una muñeca. Su unidad de control incluye un dispositivo de memoria y ocasionalmente de percepción del entorno. Normalmente su uso es el de realizar una tarea de manera cíclica, pudiéndose adaptar a otra sin cambios permanentes en su material.
Organización Internacional de Estándares (ISO):
[12] Raimundo Antelmo Vázquez Vázquez (2005) define un Robot Industrial como:
“Un manipulador multifuncional, reprogramable, capaz de mover materias, piezas,
herramientas o dispositivos especiales según trayectorias variables programadas para
realizar tareas diversas”.
Esta definición, ligeramente modificada, ha sido adoptada por la Organización Internacional de Estándares (ISO) que define al robot industrial como:
“Manipulador multifuncional reprogramable con varios grados de libertad, capaz de
manipular materias, piezas, herramientas o dispositivos especiales según trayectorias
variables programadas para realizar tareas diversas”.
Federación Internacional de Robótica (IFR):
Distingue entre robot industrial de manipulación y otros robots como se cita a continuación:
Por robot industrial de manipulación se entiende una máquina de manipulación automática,
reprogramable y multifuncional con tres o más ejes que pueden posicionar y orientar materias, piezas, herramientas o dispositivos especiales para la ejecución de trabajos diversos en las diferentes etapas de la producción industrial, ya sea en una posición fija o en movimiento.
En esta definición se debe entender que la reprogramabilidad y la multifunción se consiguen sin modificaciones físicas del robot.
Común en todas las definiciones anteriores es la aceptación del robot industrial como un
brazo mecánico con capacidad de manipulación y que incorpora un control más o menos complejo.
Un sistema robotizado, en cambio, es un concepto más amplio. Engloba todos aquellos
dispositivos que realizan tareas de forma automática en sustitución de un ser humano y que pueden incorporar uno a uno o varios robots, siendo este último el más frecuente, así lo cita [3] Dr. Víctor R. González Fernández (2003).
1.3.1
Clasificación de robots
Existen diferentes tipos y clases de robots, [1] Dr. Alejandro Tonatiu Velázquez Sánchez (2010), entre ellos con forma humana, de animales, de plantas o incluso de elementos arquitectónicos pero todos se diferencian por sus capacidades y se clasifican en:
Androides: robots con forma humana. Imitan el comportamiento del hombre, su
utilidad en la actualidad es de solo experimentación.
Móviles: se desplazan mediante una plataforma rodante (ruedas); estos robots
aseguran el transporte de piezas de un punto a otro.
Zoomórficos: es un sistema de locomoción imitando a los animales. La
aplicación de estos robots sirve, sobre todo, para el estudio y exploración de diferentes medios.
Poliarticulados: mueven sus extremidades con pocos grados de libertad. Su
utilidad es principalmente industrial, para desplazar elementos que requieren cuidados.
Manipuladores.
Robots de repetición y aprendizaje.
Robots con control por computador.
Robots inteligentes.
Micro-robots.
Manipuladores:
Son sistemas mecánicos multifuncionales, con un sencillo sistema de control, que permite gobernar el movimiento de sus elementos, de los siguientes modos:
Manual: cuando el operario controla directamente la tarea del manipulador.
De secuencia fija: cuando se repite, de forma invariable, el proceso de trabajo preparado previamente.
De secuencia variable: se pueden alterar algunas características de los ciclos de trabajo.
Existen muchas operaciones básicas que pueden ser realizadas óptimamente mediante manipuladores, por lo que se debe considerar seriamente el empleo de estos dispositivos, cuando las funciones de trabajo sean sencillas y repetitivas.
Por otra parte [12] Raimundo Antelmo Vázquez Vázquez (2005), también define al manipulador como:
Una máquina formada por un mecanismo, incluyendo varios grados de libertad, frecuentemente teniendo la apariencia de uno o varios brazos terminando en una muñeca capaz de asistir una herramienta, una pieza de trabajo o un elemento de inspección.
En particular, su unidad de control deberá usar un elemento de memoria y en muchas ocasiones usar sensores para tomar en cuenta el entorno y las circunstancias. Estas máquinas de multipropósitos están generalmente diseñadas para llevar a cabo una función repetitiva y pueden ser adaptables a otras funciones.
Robots de repetición y aprendizaje:
Son manipuladores que se limitan a repetir una secuencia de movimientos, previamente ejecutada por un operador humano, haciendo uso de un controlador manual o un dispositivo auxiliar. En este tipo de robots, el operario en la fase de enseñanza, se vale de una pistola de programación con diversos pulsadores o teclas, joysticks, un maniquí y desplazar directamente la mano del robot. Los robots de aprendizaje son los más conocidos, hoy día, en los ambientes industriales y el tipo de programación que incorporan, recibe el nombre de "gestual".
Robots con control por computador:
Son manipuladores o sistemas mecánicos multifuncionales, controlados por un computador, que habitualmente suele ser un microordenador.
un lenguaje específico, compuesto por varias instrucciones adaptadas al robot, con las que se puede confeccionar un programa de aplicación utilizando solo el terminal del computador, no el brazo. A esta programación se le denomina textual y se crea sin la intervención del manipulador.
Las grandes ventajas que ofrecen este tipo de robots, hace que se vayan imponiendo en el mercado rápidamente, lo que exige la preparación urgente de personal calificado, capaz de desarrollar programas similares a los de tipo informático.
Robots inteligentes:
Son similares a los del grupo anterior, pero, además, son capaces de relacionarse con el mundo que les rodea a través de censores y tomar decisiones en tiempo real (auto programable).
De momento, son muy poco conocidos en el mercado y se encuentran en fase experimental, la visión artificial, el sonido de máquina y la inteligencia artificial, son las ciencias que más están estudiando para su aplicación en los robots inteligentes.
Micro-robots:
Con fines educacionales, de entretenimiento o investigación, existen numerosos robots de formación o micro-robots a un precio muy accesible, cuya estructura y funcionamiento son similares a los de aplicación industrial.
Clasificación de los robots según la AFRI (Asociación Francesa de Robótica Industrial:
Tipo A Manipulador con control manual o telemando.
Tipo B Manipulador automático con ciclos pre ajustados; regulación mediante fines de carrera o topes; control por PLC; accionamiento neumático, eléctrico o hidráulico.
Tipo C Robot programable con trayectoria continua o punto a punto. Carece de conocimiento sobre su entorno.
Tipo D Robot capaz de adquirir datos de su entorno, readaptando su tarea en función de estos.
Clasificación de los robots según la IFR (Asociación Internacional de Robótica):
Robot secuencial.
Robot de trayectoria controlable.
Robot adaptativo.
Robot tele manipulado.
Aplicaciones más comunes y elementos de un robot:
Las tendencias actuales y los trabajos de investigación señalan que los robots tendrán un enorme campo de aplicación en nuestra vida cotidiana.
En la actualidad, la principal aportación de los manipuladores robóticos en la industria (según datos de ABB sistemas de México, división robótica), se dan de la siguiente forma:
Soldadura por Arco Eléctrico 38%
Soldadura por Puntos 22%
Manipulación y Transporte 15%
Tareas menos Comunes 15%
Aplicación de Pintura 10%
Elementos que constituyen un robot:
[3] Dr. Víctor R. González Fernández (2003), menciona los elementos principales de un
Robot:
Estructura mecánica.
Transmisiones.
Sistema de accionamiento.
Sistema sensorial.
Elementos terminales.
Sistema de control.
Robot programable:
[4] Ing. Luís García Reyes (2009), define que un dispositivo programable por el usuario
contiene una arquitectura general predefinida, en la cual un usuario puede programar el diseño dentro de él usando un conjunto de herramientas de desarrollo. La arquitectura general puede variar pero comúnmente consta de uno o más arreglos de términos AND y OR para la implementación de funciones lógicas. Muchos dispositivos contienen combinaciones de “flip-flop’s” y “latches”, los cuales pueden ser utilizados como elementos de almacenamiento para las entradas y salidas del dispositivo. Dispositivos más complejos contienen macro celdas. Las macro celdas permiten al usuario configurar el tipo de entradas y salidas que son necesarias para el diseño.
Robot reprogramable:
[10] Héctor Daniel Alfaro Pérez (1997), en su tesis, hace mención del concepto de
reprogramable que quiere decir:
“Si el robot tiene una nueva tarea, necesita de nuevas instrucciones para hacerlo, pero su estructura básica no cambia”.
Grado de libertad en un robot:
Todas estas configuraciones, en un principio, consideran únicamente tres grados de libertad en su representación, que permiten que el manipulador posicione su efector final en cualquier punto dentro de su espacio de trabajo.
Los cuerpos rígidos con los que se forman los mecanismos se llaman eslabones: estos se
unen a un sistema cinemático con una función bien definida de movimiento.
A la unión de dos eslabones que permiten un movimiento relativo, se le llama par cinemático o simplemente par.
El número de grados de libertad del robot viene dado por la suma de los GDL de las articulaciones que lo componen.
Configuración de los robots:
Con la finalidad de emular los movimientos del brazo, se han desarrollado diversas configuraciones básicas de los robots, los cuales basan su movimiento en los pares cinemáticos de revolución y prismáticos cuyas características se enumeran a continuación y se aprecian mejor en la figura 1.7.
Cartesiano o prismático: con capacidad de movimiento a lo largo de los ejes X, Y y Z.
Cilíndrico: con movimiento a lo largo de Z y Y, alrededor de Z.
Esférico o polar: con dos articulaciones de revolución y una prismática.
Brazo articulado o de revolución: únicamente conformado por articulaciones de revolución.
SCARA (Selective Compliant Assembly Robot Arm): con dos pares de
revolución y uno prismático, pero dispuestos en una configuración diferente a la de la configuración esférica.
1.4
Antecedentes generales a los exoesqueletos
Los exoesqueletos son una implementación de la robótica que pretenden entrar en aplicación a mediano plazo e intentar ganar terreno, mejorando la calidad de vida de la gente, desarrollando fuerza, resistencia y velocidad en muchas actividades.
Como posibles aplicaciones se tienen:
Equipos de rescate y bomberos: éstos podrán ejecutar sus actividades más hábilmente, como subir escaleras de edificios y/o viviendas sin cansarse.
Equipo militar: los soldados serán capaces de correr a altas velocidades y llevar equipos más pesados.
Personas con discapacidad: podrán trabajar y desarrollar actividades en ambientes que han sido catalogados como fuera de sus límites.
Con el fin de ser útiles y aceptados por las personas, estos exoesqueletos debe alcanzar ciertas capacidades y rendimiento en características como:
Mejora del desempeño humano: aumentar la fuerza del usuario, la resistencia, y/o la velocidad que les permita realizar tareas que antes no podía realizar.
De baja restricción: no debe impedir el movimiento natural del usuario.
Interfaz natural: proporcionar una interfaz natural, intuitiva y transparente de manera que el usuario sienta como si el exoesqueleto fuera una verdadera extensión de su cuerpo en lugar de algo que el usuario está conduciendo.
Larga duración de energía de trabajo: tener suficiente duración de uso entre la recarga de energía del sistema y el trabajo realizado, además de un fácil y rápido método de recarga.
Cómodo: seguro de usar y fácil de poner y quitar.
Al igual que con los robots, es difícil definir lo que es un exoesqueleto. Hasta cierto punto, cualquier dispositivo o unidad que el usuario puede usar se considera de ésta manera. Cuando uno conduce un automóvil, hay una sensación de que se ha convertido en una extensión del cuerpo y que junto con el conductor son una sola entidad inseparable.
Sin embargo, con un automóvil, hay algunas características que lo distinguen de un exoesqueleto ideal. En primer lugar la interfaz no es transparente.
Hay un volante para la conducción, pedal para el acelerador y para el freno, cada uno de ellos sobre todo, transmite la información de una sola manera: del usuario al mecanismo.
Estos mecanismos no tienen una correspondencia con el individuo y por lo tanto los movimientos deben ser aprendidos. Además, se impide el movimiento natural de un usuario, casi por completo, inmoviliza el cuerpo del conductor.
Determinar la intención del usuario.
Transferencias de potencia mecánica hacia el usuario.
Presente baja impedancia.
Si bien, la definición más acertada es la que lo describe como:
“Un mecanismo o estructura externa que tiene uniones que corresponden a las del cuerpo humano”. Este es usado por el humano y el contacto físico que existe entre el operador y el exoesqueleto permite una transferencia directa de la potencia mecánica y las señales de información.
Puede ser usado para tres diferentes aplicaciones, en donde el diseño del mismo depende estrictamente de la aplicación en particular:
Amplificación de potencia.
Dispositivos maestro de un sistema tele-operador maestro-esclavo.
Dispositivos Hápticos.
El diseño de la estructura del exoesqueleto debe estar dirigido a soportar una carga neta, además de proveer una interfaz mecánica con el operador que sea transparente y permitir una utilización eficiente de la energía del sistema, por lo tanto:
“En esencia un exoesqueleto para amplificar fuerza es un dispositivo que envuelve al
usuario para soportar una carga neta y su propio peso con el objeto de minimizar las
perturbaciones de carga sobre el operario”.
El uso de un exoesqueleto para amplificación de fuerza realiza básicamente la tarea de dar cierta ganancia al momento neto que ejerce el humano sobre una carga mediante un actuador, de tal forma que el humano aporte siempre un porcentaje del esfuerzo.
No obstante el actuador debe realizarlo de tal forma que para el humano no sea notoria la reacción de la estructura y no se introduzcan retardos en la acción de la fuerza. Lo anterior requiere un sistema de control que actualice en tiempo real una señal, producto de la interacción entre el dispositivo y la máquina, como se muestra en la figura 1.8.
Fig. 1.8 Interacción entre el humano, el exoesqueleto y la carga, [46] Universidad Tecnológica de Pereira
Un exoesqueleto, como el que se muestra en la figura 1.9, técnicamente cumple los requisitos para ser definido como un robot ya que en él se puede ver que hay grados de libertad, existe un eslabonamiento, es programable, reprogramable y además se rige bajo una cinemática.
Fig. 1.9 Representación esquemática básica de un brazo exoesqueleto, [46] Universidad Tecnológica de
Pereira (Septiembre de 2008).
Se proporcionan algunos ejemplos de aplicaciones que tienen los exoesqueletos hoy en día, así como sus desarrolladores, inversiones de costos, tiempo y recursos.
REX [21, 27, 29, 39]:
Las piernas biónicas denominadas "REX" (robotic exoskeleton en inglés o exoesqueleto robótico en español) es un invento de Richard Little y Robert Irving, dos ingenieros escoceses que emigraron a Nueva Zelanda a principios de 1990.
Los inventores han creado la empresa "REX Boinics" que en estos momentos emplean a 25 mecatrónicos e ingenieros de software. En los 10 años que llevan trabajando en el proyecto han invertido $7.1 millones de dólares.
Como se muestra en la figura 1.10, se trata de un dispositivo para las piernas que es capaz de soportar el peso de un ser humano centrándose en la necesidad que tienen las personas con discapacidad para caminar por sí solas y que se maneja de una forma muy sencilla mediante un joystick.
Fig. 1.10 Exoesqueleto Rex para personas con discapacidad en las piernas
HULC [15, 22, 35, 42]:
La industria armamentística sin duda es una de las pioneras en el desarrollo y prueba de nuevos prototipos que les ayuden a ganar dinero en un mercado que mueve muchos miles de millones.
Fruto del desarrollo de estas investigaciones nace este prototipo, el nombre del exoesqueleto viene de "Human Universal Load Carrier".
A pesar de los 24 kilos de peso del dispositivo, el exoesqueleto permite que el soldado del siglo XXI pueda llevar una carga adicional de 90 kilos.
Fue creado por Lockheed Martin, fabricante de aeronaves el cual ha recibido un contrato de $1,100 millones de dólares por parte del Centro de Sistemas para Soldados en Natick, Massachusetts, para que el ejército de EE.UU pruebe y evalué el exoesqueleto, diseñado para aumentar fuerza y resistencia en soldados, así como reducir las lesiones en el transporte de carga, el cual se muestra en la figura 1.11.
Fig. 1.11 Exoesqueleto Hulc para el ejército de EE.UU
El sistema incluye un control optimizado y duración de la batería de hasta 72 horas, está diseñado para transferir el peso de las cargas pesadas al piso a través de la piernas robóticas, mientras que una micro-computadora avanzada abordo asegura que se mueva de manera sincronizada con el operador.
Los investigadores del Natick Soldier Center evaluarán cómo el funcionamiento del sistema afecta el desempeño de los soldados. Además, las pruebas biomecánicas medirán la energía gastada por un soldado cuando se utiliza el exoesqueleto y las pruebas de laboratorio evaluarán la facilidad en que sus usuarios aprenden a utilizar el sistema HULC, realizando varias cargas y moviéndose a diferentes velocidades.
HAL-5 [17, 19, 41]:
Cyberdyne, empresa japonesa, lleva aproximadamente 14 años desarrollando un exoesqueleto futurista, el HAL-5 (hybrid assistive limb o asistente híbrido de miembros). En un principio el proyecto iba orientado a ayudar a las personas ancianas o discapacitadas a caminar por sí mismas, cosa que se consiguió en el 2000 con el HAL-3. En el año 2005 se dotó al último modelo de prótesis de cintura para arriba unidades de potencia más compactas, se le redujo el peso, se aumentó la duración de la batería y se mejoró su diseño externo.
El diseño actual, el HAL-5, mide 1.60m y pesa 23kg y se basa en interpretar las señales eléctricas que salen del cerebro para saber qué músculo se moverá, en ese momento se activan los motores necesarios para ayudar a realizar el movimiento. Esto permite, junto con el uso de juntas y válvulas, que el esfuerzo por parte del usuario sea mínimo.
En un principio, como la mayoría de dispositivos independientes, uno de los problemas con los que se encontró fue el energético, la batería era capaz de suministrar energía suficiente para funcionar durante dos horas y media antes de necesitar una recarga.
Actualmente se incrementa la fuerza de 2 a 10 veces, dependiendo de cómo y qué se quiera levantar o empujar. Se puede usar tanto en interiores como en exteriores y tiene una batería que puede durar de 3 a 5 horas. En la figura 1.12 se muestra una persona equipando el actual exoesqueleto.
Después de casi un año de su presentación en la International Robot Expo (IREX) de Japón, al parecer el traje robótico está listo para su producción en masa.
Creado por el profesor Yoshiyuki Sankai de la Universidad de Tsukuba, el traje robotizado es desarrollado para aquellos que necesitan una ayuda extra, es capaz de proporcionar un 80\% más de fuerza a la persona que lo viste y ya se ha demostrado su utilidad como ayuda para caminar, en rehabilitación y trabajo en fábricas.
Fig. 1.12 Traje exoesqueleto HAL-5 para el desarrollo de fuerza
XOS y XOS-2 [24, 32, 36, 43, 44]:
El exoesqueleto desarrollado por "Sarcos" (empresa americana de investigación y desarrollo), financiado por DARPA (Defense Advanced Research Projects Agency, de los EE.UU.), con un presupuesto de $50 millones de dólares en investigación. El responsable del proyecto, llamado "Exoskeletons Human Performance Augmentation", es Steve Jacobsen el cual desarrolló un esqueleto mecánico funcional que aumentara la fuerza del usuario a niveles inimaginables.
Las dificultades para su desarrollo eran demasiadas: el exoesqueleto tenía que ser pequeño, liviano, necesitaba ser rápido, tener músculos artificiales y un sistema de control simple que hiciera cosas complejas.
El exoesqueleto XOS puede levantar 100 kilogramos, como si pesaran solo un kilo. O sea, que puede levantar una tonelada como si pesara 10 kilos. Esto es posible gracias a los músculos artificiales y al diseño del exoesqueleto. Las instrucciones que recibe de los miembros del usuario van a una serie de válvulas. Estas válvulas controlan el flujo hidráulico de alta presión de unos cilindros que actúan como juntas. Cuenta con 30 de estos cilindros, por lo que la movilidad es excepcional.
En la primera etapa del XOS, mostrado en la figura 1.13, el principal problema es su fuente de alimentación. Debe estar conectado para operar de forma continua. La batería apenas dura 40 minutos.
En su segunda generación, mostrado en la figura 1.14, la compañía en desarrollo tecnológico Raytheon junto con Sarcos, mejoraron el diseño, el XOS2. Ha sido elaborado con la finalidad de permitir a soldados participar en actividades de alta resistencia reduciendo considerablemente la fatiga muscular.
El traje se basa en una combinación de estructuras, sensores y controladores, y es accionado por un sistema hidráulico de alta presión. Este diseño especial ayuda a sobrepasar los retos logísticos que puedan presentarse en el ámbito militar. Reduce tanto la tensión y el esfuerzo de los soldados, y al mismo tiempo hace el trabajo más rápido y eficiente. Esto también ayudaría a reducir las lesiones que puedan presentarse.
Esta nueva versión es más ligera, posee mayor fuerza y velocidad que su predecesor, y sin embargo utiliza un 50% menos de energía para su funcionamiento, además de que su innovador diseño lo hace más resistente al medio ambiente. El esfuerzo por hacer muchas actividades pesadas es prácticamente nulo, tiene una relación de 17:01.
Fig. 1.14 Exoesqueleto XOS-2 en su segunda etapa
ReWalk [16, 23, 26, 33]:
El dispositivo cuenta con una mochila de entre 3 a 6 seis kilos que el usuario debe llevar en la espalda, donde lleva el ordenador y la batería. Mientras tanto, motores en la cadera y rodillas permiten llevar a cabo los movimientos. Para controlarlo, el usuario debe llevar un mando en la muñeca que le permite hacer seis movimientos diferentes: ponerse de pie, caminar, ascender y descender escaleras, quedarse parado y sentarse. El usuario camina con muletas y controla el traje por medio de cambios en el centro de gravedad y movimientos en la parte superior del cuerpo.
ReWalk plantea básicamente eliminar todas las barreras físicas que actualmente tienen que afrontar las personas con éste tipo de discapacidades y eliminar muchas dolencias asociadas a un uso prolongado de la silla de ruedas. La compañía afirma que estará por debajo de los $25,000 dólares, que es lo que cuesta una silla de ruedas motorizada actualmente y que estará disponible a finales de 2009 principios de 2010.
Fig. 1.15 Traje exoesqueleto Rewalk para personas con paraplejía.
Power Loader [19, 25, 37, 45]:
Desarrollado por ingenieros de Activelink Co. Ltd., una compañía subsidiaria de Panasonic en Kyoto, este traje robótico toma su nombre del exoesqueleto hidráulico que apareció en la película de ciencia ficción Aliens de 1986.
La idea es desarrollar máquinas para uso industrial y en la construcción, que permitieran a un operario manipular grandes pesos de una forma mucho más intuitiva que con otras máquinas que hacen cosas similares.
Está diseñado claramente para aquellas personas que en su vida profesional necesitan levantar objetos de grandes dimensiones o simplemente tengan sus condiciones físicas limitadas por cuestiones de edad o discapacidad motora.
El Power Loader, mostrado en la figura 1.16 está construido sobre un chasis de aleación de aluminio y pesa 230 kilogramos. Descrito como un "dual-arm power amplification robot" (brazos robóticos de fuerza amplificada), el traje exoesqueleto está equipado con 18 motores electromagnéticos que permiten al usuario levantar 100 kilogramos de peso con poco esfuerzo. Su funcionamiento es a través de un mecanismo sencillo basado en un grupo de sensores que recogen e imitan los movimientos del usuario al mismo tiempo que ayudan a mantener el equilibrio a éste.
No tiene aplicaciones para rehabilitación sino potenciales aplicaciones industriales. El sistema de control es totalmente intuitivo y cuenta con la fuerza de respuesta directa, permitiendo al operador sentir los movimientos del Robot, mientras lo controla.
Se planea tenerlo en el mercado en el 2015.
Fig. 1.16 Exoesqueleto Power Loader con fines para la industria
con fuerza retroalimentada para predecir y aumentar los movimientos de las piernas (aumento de la fuerza de hasta 40 kg/400N).
Cuenta con seis sensores de fuerza en el sentido de los pedales al mover y cambiar su peso, permitiendo coincidir con los movimientos de las piernas.
Le han dado luz verde para que los investigadores de todo el mundo puedan participar en las mejoras que necesitaría. Por el momento es solo para investigación y desarrollo. Cuesta demasiado y no está preparado para ser comercializado para el público general. Sí pueden comprarlo investigadores que quieran participar en sus mejoras siempre y cuando publiquen sus resultados antes de un año.
El Power Loader Light puede ser utilizado como una plataforma de investigación robótica, interfaces hombre-máquina, índice de masa corporal (interfaces cerebro-máquina) y así sucesivamente, focalizando la atención en la rehabilitación. El sistema está diseñado para funcionar con Linux 2.6 y está totalmente abierto a la personalización de los investigadores (incluyendo el hardware).
El precio inicial es de $18,000,000 yenes ($159,846 euros ó $223,000 dólares), pero universidades y centros de investigación pueden comprarlos por hasta $111,500 dólares, si cumplen algunas condiciones, como publicar sus resultados en menos de un año, compartirlos y permitir que otros los reproduzcan en menos de 3 años.
1.5
Planteamiento del problema
Como se ha visto, las aplicaciones de los exoesqueletos van desde los fines militares, la rehabilitación, hasta el trabajo para la industria.
Actualmente es un tema importante de desarrollo, en donde grandes compañías invierten enormes sumas de dinero con fines de investigación y producción de prototipos, esperando comercializarlos dependiendo de sus aplicaciones.
Pero, ¿si se relaciona el precio de volver a caminar contra el valor de un automóvil nuevo, se haría tal inversión?
O incluso ¿Tener un dispositivo de ayuda para los brazos y el cuerpo con el cual evitemos lesiones de trabajo?
Tal vez personas con buenos recursos económicos lo harían, sin embargo es muy bien sabido que un gran porcentaje de personas con discapacidad son de bajos recursos y si les es difícil comprar un automóvil nuevo, ¿pagarían por un dispositivo de estos costeando incluso los gastos de transporte?
El fin principal del proyecto es crear un dispositivo el cual pueda estar al alcance de personas con bajos recursos económicos, que sea versátil y funcional.
1.6
Hipótesis
CAPITULO 2
Fundamentos teóricos
2.1 Identificación del sistema
2.2 Actuadores eléctricos
2.2.1 Método de control, puente h
2.3 Dispositivos MEMS (acelerómetros)
2.1 Identificación del sistema
Como material de apoyo en esta parte, se tomó un artículo publicado por la [38] revista de ingeniería (31 de Octubre de 2005) de la facultad de Ingeniería de la Universidad de los Andes, de la cual, se extrae la siguiente información:
La representación clásica de movimientos realizados por extremidades humanas es muy adecuada para describir individualmente que se realiza en planos, pero presenta algunas incoherencias cuando se intentan describir de forma tridimensional, esto se vuelve relativamente complejo.
En esta parte se propone una modificación de la representación de movimientos del brazo humano, especialmente útil para poder representarlos de manera mecánica.
Evidentemente, se realiza en tres dimensiones: cada segmento del cuerpo va asumiendo posiciones y orientaciones en el espacio. Sin embargo, la comprensión es más simple si se realiza en dos dimensiones, proyectándolo en un plano adecuado.
Para poder describir la posición espacial de los segmentos del cuerpo humano se ha utilizado tradicionalmente un sistema de coordenadas cartesiano con origen en el centro de gravedad del cuerpo.
Esta representación es muy adecuada para describir movimientos, como el de la marcha humana, que están prácticamente confinados a un plano.
En el caso particular de las extremidades superiores, la referencia de movimientos se define con respecto a una posición arbitraria, denominada posición anatómica, que corresponde a tener el brazo al costado del tórax con la palma de la mano hacia el frente.
A partir de esta posición se identifican los movimientos de la cadena formada por los segmentos de la extremidad superior.
Los segmentos que componen el modelo serán tratados como cuerpos rígidos y se definen en la tabla 2.1:
El modelo biomecánico como el que se muestra en la figura 2.2 de la extremidad superior se define como una cadena abierta de 5 segmentos rígidos, conectados entre sí por 4 uniones articulares simples.
Fig. 2.2 Modelo biomecánico del brazo humano
Estos segmentos se unen por medio de cuatro articulaciones, como se muestra en la figura 2.3 que proveen un total de nueve grados de libertad. Las articulaciones que se han incluido en el modelo mostrado son, de izquierda a derecha:
La articulación esterno-clavicular que permite 2 grados de libertad.
El hombro que permite 3 grados de libertad y funcionalmente es la unión de las articulaciones acromio-clavicular y gleno-humeral.
El codo y la muñeca que permiten cada uno 2 grados de libertad.
Cada articulación se define a través de un centro articular, que es un punto que se considera fijo a los dos cuerpos adyacentes. La articulación del hombro, especialmente, se considera como una unión esférica simple, que mantiene la funcionalidad de los movimientos del hombro pero no su configuración real.
El antebrazo se considera como un cuerpo rígido, lo cual hace que los movimientos de pronación y supinación se deban considerar alrededor del codo.
La mano se modela como un cuerpo rígido.
Figura 2.3 Articulaciones del brazo humano
En la figura 2.4 se muestran los ejes principales que se definen para describir el movimiento del hombro: un eje transverso (T) que va desde un hombro hasta el otro; un eje antero-posterior (A) que va de atrás hacia delante a través del hombro; y un eje longitudinal (L) que atraviesa el hombro verticalmente y es perpendicular a los dos anteriores.
Adicionalmente, se define un eje longitudinal del miembro (H) fijo al húmero.
Con base en estos ejes se definen los siguientes planos de referencia:
El plano de flexión - extensión, el cual contiene el eje antero-posterior y el eje longitudinal, y es normal al eje transverso.
El plano de abducción - aducción, el cual contiene los ejes transverso y longitudinal, y es normal al eje antero-posterior.
El plano neutro, el cual contiene los ejes transverso y antero-posterior, y es normal al eje longitudinal.
Teniendo estas definiciones de ejes y planos, los movimientos del hombro se definen como:
Flexión: Este movimiento tiene lugar alrededor del eje transverso y es una descripción del movimiento que ocurre cuando se eleva el brazo hacia adelante. En el caso del hombro, se cuantifica mediante el valor del ángulo que se crea entre el brazo y el eje longitudinal en el plano de Flexión - Extensión. En la posición anatómica la flexión del hombro es nula.
Extensión: Movimiento opuesto a la flexión, también tiene lugar alrededor del eje transverso. Se describe como el movimiento que acerca el brazo hacia el cuerpo si el brazo está en flexión.
Abducción y Aducción: Estos movimientos tienen lugar alrededor del eje antero-posterior y ocurren cuando el brazo se aleja del cuerpo (abducción) y cuando se acerca nuevamente (aducción). Para el hombro, estos movimientos se cuantifican mediante el valor del ángulo creado entre el brazo y el eje longitudinal en el plano de Abducción - Aducción.
Rotación de Hombro: Este movimiento tiene lugar alrededor del eje longitudinal del miembro. Se define como la rotación del miembro sobre su propio eje.
Esta descripción del brazo es ampliamente utilizada por fisioterapeutas y médicos, y resulta especialmente útil para describir movimientos sencillos del tipo arcos de movimiento. Sin embargo, estas definiciones no son lo suficientemente claras y precisas para definir movimientos complejos, entendidos como movimientos compuestos que ocurren en el espacio tridimensional.
Para ilustrar este punto en la figura 2.5 se muestra una secuencia correspondiente a tres movimientos simples ejecutados sucesivamente: un giro de 90º respecto al eje trasverso, un giro de -90º respecto al eje longitudinal y un giro de 90º respecto al eje antero-posterior. Aunque las definiciones anteriores sobre los movimientos del brazo humano no muy específicas, es más que suficiente esta información para poder implementarlas en la construcción del exoesqueleto.
![Fig. 1.4 Representación de un sistema de lazo abierto, [8] Eloy Anguiano Rey (2008).](https://thumb-us.123doks.com/thumbv2/123dok_es/4957437.75040/18.612.146.473.421.691/fig-representacion-sistema-lazo-abierto-eloy-anguiano-rey.webp)
![Fig. 1.5 Sistema de lazo cerrado, [8] Eloy Anguiano Rey (2008).](https://thumb-us.123doks.com/thumbv2/123dok_es/4957437.75040/19.612.127.486.331.543/fig-sistema-lazo-cerrado-eloy-anguiano-rey.webp)