V
A
^
^
M
Ì ö e
m
m
m
m
^ M M ^ m i c a y
ELECRMCA
D w m u m œ
mmDIOS OK
p
m
r
m
m
m
m h t i m s > m m w y z f u x i m u t s m o Y
i c m m o h
E L B c m o M œ
a \ m m .
c o m p o t e
»
I M G , A M A N D O
PMZ
O l D i l ^
!•:•; re a
ú >3 s
E M O P Q O N M » C U M »
IM
M Ä B I f T I t O E M
C H E N C H A S D E L A I N G E N I E R I A C O N
E S P E Q A O D Ä Ö MM FOFEMCIA
m
r
m >
o z
H >
x i r
-O ç/5
o g
a >
m G)
O =
*
Tí
m O
in
o S
~
> g
3 c/>
O m
7 3 z *
O o
O - <
? °
2 o
TM
Z 5 8 5 3
. M 2
F I M E
UNIVERSIDAD AUTONOMA
DE
NUEVO LEON
FACULTAD DE INGENIERIA MECANICA Y
ELECTRICA
DIVISION DE ESTUDIOS DE POSTGRADO
POR-ING. ARMANDO PAEZ ORDOÑEZ
T E S I S
EN OPCION AL GRADO DE MAESTRO EN
CIENCIAS DE LA INGENIERIA CON
ESPECIALIDAD EN POTENCIA
c v t T - S f f í o
T N \
F O N D O
Universidad Autónoma de Nuevo León
Facultad de Ingeniería Mecánica y Eléctrica
División de Estudios de Postgrado
Los miembros del comité de tesis recomendamos que la tesis Análisis,
Diagnostico, rediseño v control electrónico de motores eléctricos de C
.A.
por
computadora realizada por el Ing. Armando Páez Ordóñez sea aceptada para
su defensa como opción al grado de Maestro en ciencias de la Ingeniería
Eléctrica con especialidad en Potencia
El comité de tesis
M.C. Agustín Iglesias Torres
M.C. RQBÉRTO VILLARREAL GARZA
División de Estudios de Postgrado
PROLOGO
Diciembre de 1997
La combinación de las computadoras y la electrónica de Potencia le ha dado un nuevo giro a
la aplicación, análisis, diagnostico de verificación,redi seño y control de los motores
eléctricos de C.A. El Presente proyecto consiste en el desarrollo de software y equipo
auxiliar de bajo costo para:
(Bajo norma NEMA, IEC, JEC, IEEE, AWG, EASA, ASTM.)
(para motores industriales de cualquier capacidad)
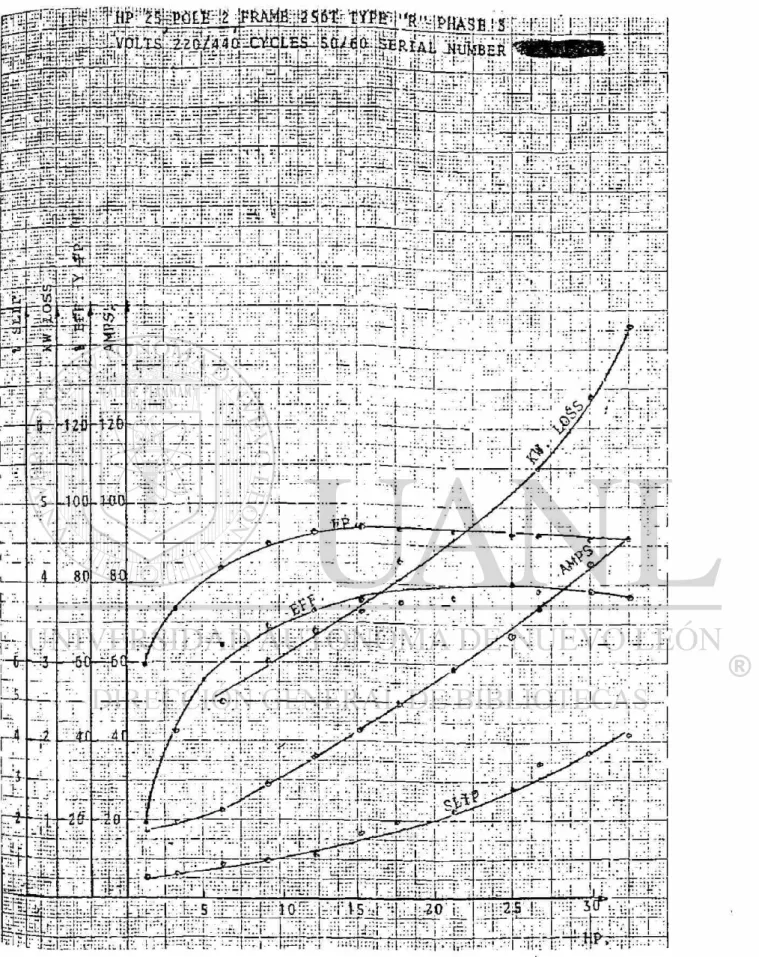
A) Analizar el funcionamiento de motores industriales de C A y CD calculando el Par,
R .P.M., Eficiencia, Factor de potencia, Deslizamiento, Ampers, Potencia de entrada etc.
. a diferentes HP'S de salida sin uso de dinamómetro y Graficar estos .
B) Diagnosticar, verificar, y corregir las especificaciones de motores de CA.
C) Rediseñar un embobinado de un motor de CA para nuevas condiciones de operación
(NUEVOS HP'S, R.P.M, VOLTAJE, FRECUENCIA, ETC.)
D) Diseño de un embobinado para un núcleo sin datos.
E) Prueba Computarizada de la laminación y del motor en general.
F) ANÁLISIS DE LOS SISTEMAS DE CONTROL ELECTRÓNICO
COMPUTARIZADO DE MOTORES DE . CA PARA EL AHORRO DE ENERGÍA
ELÉCTRICA.
OBJETIVOS Y METAS
Desarrollar el software con un método económico para analizar, diagnosticar, verificar y
rediseño motores eléctricos industriales de cualquier capacidad. Con énfasis en el ahorro de
energía.
El desarrollo de estos programas se inicio realmente desde hace 20 años, como una
necesidad en la asesoría de un servidor en mas de 40 empresas del país.
Estos programas se han estado utilizando satisfactoriamente en mas de 25 empresas del país.
Comprobar en la practica real los procedimientos establecidos en el software
Métodos de calculo bajo normas Internacionales reconocidas utilizando métodos economi
eos.
Que los alumnos aprendan y apliquen las técnicas de Análisis y rediseño computarizado de
motores eléctricos de alta eficiencia con énfasis en:
* Utilización de computadoras para su análisis y diseño.
* El ahorro de energía eléctrica.
* Contaminación ambiental.
* Control de calidad.
* Aplicación de las normas nacionales e internacionales y pueda aplicar esto en su vida
profesional.
El efecto de este proyecto en la contaminación ambiental radica en la sustitución de motores
de combustión interna por eléctricos en el transporte (Vehículos eléctricos tales como:
trenes, metro, automóviles, camiones, etc.)
* Prestar este servicio a la industria.
* EL PODER HACER EN MENOS DE 5 MINUTOS UN DIAGNOSTICO DE UN MOTOR DE
INDUCCIÓN TRIFASICO Y VERIFICAR SI SON CORRECTAS LAS ESPECIFICACIONES DEL
EMBOBINADO. ERRORES EN TOMAR LOS DATOS DE UN MOTOR ANTIGUO QUEMADO
FRECUENTEMENTE OCURREN. EN ESPECIAL CUANDO HAY MUCHAS VUELTAS DE ALAMBRE
DELGADO. ESTOS ERRORES PUEDEN SER HECHOS POSIBLEMENTE POR CENTRO DE
REPARACIÓN ANTERIORES.
LOS CÁLCULOS DE RE DISEÑO HECHOS MANUALMENTE. GENERALMENTE REQUIEREN AL
MENOS DE
'A
DÍA DE UN DISEÑADOR CON EXPERIENCIA DE DISEÑO DE MOTORES.
EL REDISENO TAMBIÉN PUEDE REALIZARSE CUANDO SE REQUIERE CAMBIOS EN
VELOCIDAD (R.P.M.). VOLTAJE. HPS, CONEXIÓN. FASES , CALIBRES DE ALAMBRE.
Hasta ahora solo los fabricantes que manejan grandes volúmenes podrían tener un sistema
computarizado, equipo y personal para el diagnostico verificación y diseño de motores
eléctricos industriales.
Este método lo hará disponible para la mediana y pequeña industria, es común que en los
talleres de rembobinados de motores alternen los datos (vueltas y calibres) de
los motores o dañen la laminación con altas temperaturas por soplete u hornos, este meto
do permitirá verificarlos y corregirlos.
Las Universidades y tecnológicos en México no estudian el análisis, diagnostico de
verificación y re diseño de motores industriales.(CON ÉNFASIS EN EL AHORRO DE
ENERGÍA)
Modernizar y actualizar con métodos normalizados y computarizado s la aplicación industrial
y la enseñanza en las clases y laboratorios de:
* Maquinas eléctricas de inducción
* El laboratorio podrá ser autofinanciable en su mantenimiento y operación realizando
trabajos de pruebas de control de calidad de investigación.
* AHORRO DE ENERGÍA ELÉCTRICA EN EL REDI SEÑO DE MOTORES . .
INDUSTRIALES Y SUS SISTEMAS DE CONTROL ELECTRÓNICO
FIME UANL puede dar este servicio.
Para motores industriales de 100'S o 1000'S de HPS no requiere dinamómetros
costosos
Métodos de calculo bajo normas internacionales reconocidas utilizando Métodos
económicos.
Tomando como base la experiencia de un servidor a nivel nacional e internacional en el
tema se desarrollo el software siguiendo las normas y comprobándolo con casos reales en el
laboratorio y en la industria nacional.
Los programas se realizaran en TURBO PASCAL y QuickBasic. para computadoras IBM o
compatibles, los primeros programas fueron desarollados en calculadoras programables de
Texas instruments y HP
ANÁLISIS, DIAGNOSTICO, REDISEÑO Y CONTROL ELECTRÓNICO DE
MOTORES ELÉCTRICOS DE C.A. POR COMPUTADORA
CONTENIDO:
CAPITULO 1 INTRODUCCIÓN
Teoría Básica de los Motores de Inducción 1
El Campo Giratorio 2
Partes Mecánicas 12
CAPITULO 2
Devanados de C.A. Polifásicos 17
Tipos de Devanados 24
Arrollamientos Polifásicos Imbricados 25
Arrollamientos Polifásicos Ondulados 34
Conexiones Y-2Y 37
Conexiones DELTA Y DOBLE DELTA 38
Diagramas Esquemáticos para Devanados Trifásicos 40
CAPITULO 3
La FEM inducida en un Devanado de C.A 44
El Factor de Distribución 44
El Factor de Paso 48
Devanados de dos Velocidades 53
M,todo Practico para realizar Diagramas de Polo Consecuente 58
Ejemplos 64
CAPITULO 4
La FMM de un Devanado de C.A 67
La FMM Alterna 67
La FMM Giratoria 73
Factores de Distribución y de Paso para las Armónicas 79
Ejemplo 79
C A P I T U L O 5
El Motor de Inducción como un Transformador 84
El MI en reposo (Devanado de Rotor Abierto) 84
El M3 en reposo (Devanado del Rotor Cerrado) 87
El MI cuando gira 89
Circuito Equivalente del MI Polifásico 90
El Diagrama Vectorial del MI Polifásico 92
CAPITULO 6
Determinación de los Par metros del MI Polifásico 93
Determinación de rl y corrección por temperatura 93
Prueba de Rotor Bloqueado (A pleno voltaje) 94
Prueba de Vacío 96
Variación de los par metros con el deslizamiento 97
Efecto de la Variación de voltaje y frecuencia en las
características del Motor de Inducción 98
Ejemplo 99
Diagrama de Flujo del Programa "Par metros del MI" 105
Prueba de Funcionamiento 106
Prueba de Saturación en Vacío 110
Características par-velocidad 111
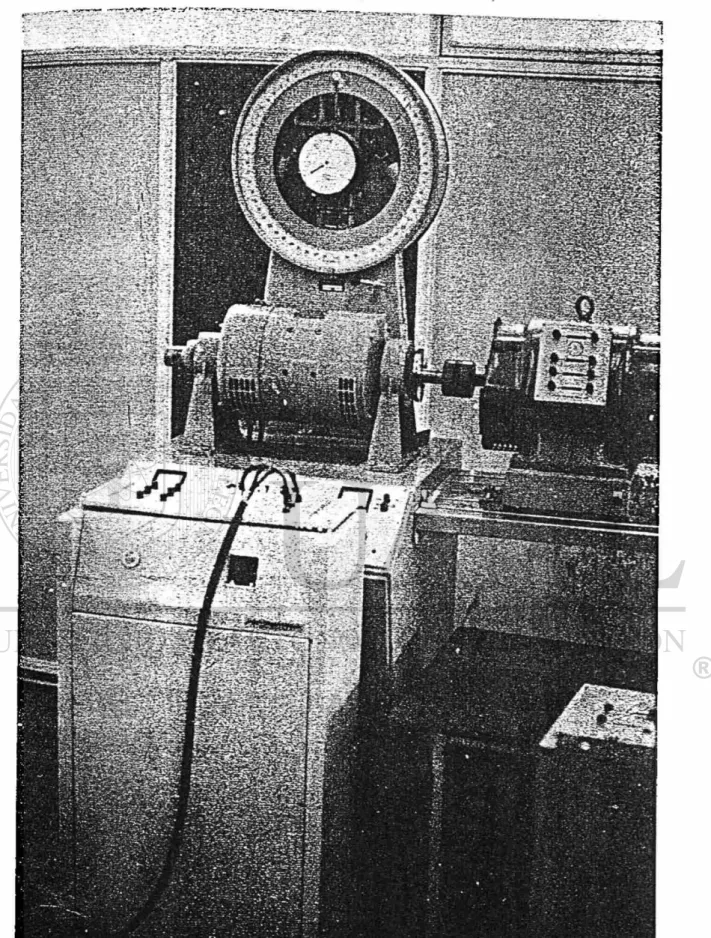
Prueba de Elevación de Temperatura 121
Operación del Dinamametro de Conexión Ward Leonard 6-35
CAPITULO 7
RELACIONES DE POTENCIA Y PAR MOTOR DEL MOTOR DE INDUCCIÓN 126
PAR MOTOR MÁXIMO 127
CLASIFICACIÓN "NEMA" DE MOTORES DE INDUCCIÓN 128
BALANCE DE POTENCIAS, EFICIENCIA DEL MOTOR DE INDUCCIÓN 129
DIAGRAMA DE FLUJO DEL PROGRAMA "ANÁLISIS DEL MOTOR DE
INDUCCIÓN TRIFASICO" 130
EJEMPLOS DEL PROGRAMA ANÁLISIS DEL MOTOR DE INDUCCIÓN
TRIFASICO 131
FUNCIONAMIENTO DE LA MAQUINA DE INDUCCIÓN COMO FRENO Y
GENERADOR 135
CAPITULO 8
SLMBOLOGIA 137
ARRANCADORES MAGNÉTICOS REVERSIBLES Y NO REVERSIBLES 140
ARRANQUE Y CONTROL DE VELOCIDAD DE MOTORES POLIFASICOS DE
INDUCCIÓN 143
ARRANCADOR A TENSIÓN REDUCIDA 144
A) POR RESISTENCIAS O REACTANCIAS 145
B) POR AUTOTRANSFORMADOR 146
C) ESTRELLA - DELTA 147
D) CON UNA SECCIÓN DEL ENB OBI NADO 148
ARRANCADORES PARA MOTORES DE ROTOR EMBOBINADO 149
CAPITULO 9
CONTROL DE VELOCIDAD DE MOTORES DE INDUCCIÓN
INTRODUCCIÓN 150
COMPARACIÓN ENTRE EL MOTOR DE INDUCCIÓN DE CA Y EL
MOTOR DE CD 152
SISTEMAS DE CONTROL DE CA VS CD 153
CLASIFICACIÓN DE LOS SISTEMAS DE CONTROL DE VELOCIDAD 154
CONTROL DE VELOCIDAD POR FRECUENCIA PRIMARIA POR MEDIO DE
INVERSORES 155
CLASIFICACIÓN DE INVERSORES 156
INVERSOR TIPO VSI FUENTE DE VOLTAJE 156
DIAGRAMA DE BLOCKS DE UN CONTROLADOR VSI PARA MOTOR DE
INDUCCIÓN 167
TRANSISTORES DE POTENCIA 168
INVERSORES CON TRANSISTORES DE POTENCIA 169
FUNCIONAMIENTO EN BAJA FRECUENCIA CON V/F INCREMENTADO
(VOLTAGE BOOST) 171
INVERSOR TIPO FUENTE DE CORRIENTE CSI 173
EFECTO DE REGENERACIÓN EN UN INVERSOR TIPO VSI Y CSI 174
DIAGRAMA DE BLOCKS DE UN CONTROLADOR PARA MOTOR DE CA
CON INVERSOR TIPO CSI 174
INVERSOR CSI CON FRECUENCIA Y ESTABILIDAD MEJORADA 175
INVERSOR TIPO PWM (MODULACIÓN DEL ANCHO DEL PULSO) 177
CONTROL COMPUTARIZADO PARA MOTOR DE CA (PWM) 177a
CONTROL POR VOLTAJE PRIMARIO 178
CONTROL DEL MOTOR CA DE ROTOR EMBOBINADO POR RESISTENCIAS
EN EL ROTOR 181
CONTROL POR LA RECUPERACIÓN DE LA ENERGÍA DEL ROTOR 184
SISTEMA KRAMER ESTÁTICO 185
SISTEMA KRAMER ESTÁTICO SIN CONMUTADOR 186a
SISTEMA SCHERBIUS 187
SISTEMA SCHERBIUS ESTÁTICO 188
SISTEMA SCHERBIUS ESTÁTICO SUPERSINCRONICO 191
MOTOR DE CA/CD SIN CONMUTADOR 194
CARACTERÍSTICAS IMPORTANTES PARA LA SELECCIÓN Y APLICACIÓN
CAPITULO 10
FUNDAMENTOS EN EL REDISEÑO DE MOTORES ELÉCTRICOS DE
CORRIENTE ALTERNA
Cambio de Calibres 198
Cambio en Voltaje 200
Cambio de Potencia en HP'S o KW 203
Cambio de Frecuencia 207
Cambio de Circuitos en Paralelo 210
Cambio de paso de Bobina 213
Cambio de Conexión 216
Formula Maestra 218
Notas en Cambio de Polos (VELOCIDAD) ' 220
CAPITULO II.
ANÁLISIS, DIAGNOSTICO Y REDISEÑO DE MOTORES ELÉCTRICOS CA POR
COMPUTADORA
INSTRUCCIONES BÁSICAS 224
EJEMPLO DE OPERACIÓN 229
DIAGNOSTICO MOTOR DE 125 HPS, 1800 R.P.M.
DIAGRAMA DE FLUJO PROGRAMA DIAGNOSTICO MOTOR CA 241
REDISEÑO DEL MOTOR DE INDUCCIÓN 242
EJEMPLO REDISEÑO MOTOR 125 HPS DE 1800 R.P.M. A 1200 R.P.M 247
DISEÑO PARA NÚCLEO SIN DATOS MOTOR 75 HPS, 1800 R.P.M 253
DIAGRAMA DE FLUJO DISEÑO PARA NÚCLEO SIN DATOS 255
CÁLCULOS DE PRUEBA PEDIDAS DEL NÚCLEO( TOROIDE) 265
REDISEÑO UNA A DOS VELOCIDADES 269
A) PAR CONSTANTE
B) HPS CONSTANTES
C) PAR VARIABLE
ANÁLISIS DE FUNCIONAMIENTO DEL MOTOR DE INDUCCIÓN BAJO
NORMAS JEC-37 275
CALCULO DEL EMBOBINADO DEL ROTOR 279
CONCLUSIONES 281
C A P I T U L O I
M A Q U I N A S DE I N D U C C I O N T R I F A S I C A S
T E O R I A B A S I C A DE O P E R A C I O N
En los m o t o r e s e l é c t r i c o s la c o n v e r s i ó n de e n e r g í a e l é c t r i c a
-a e n e r g í -a m e c á n i c -a tiene l u g -a r en l-a p -a r t e g i r -a t o r i -a de. l-a m -a
q u i n a . En los m o t o r e s de C . D . y en u n tipo d e m o t o r de C . A .
-la e n e r g í a e l é c t r i c a es l l e v a d a d i r e c t a m e n t e al r o t o r a t r a —
v é s de e s c o b i l l a s y un c o n m u t a d o r , s i e n d o p o s i b l e d e n o m i n a r a
é s t a m a q u i n a como un m o t o r de c o n d u c c i ó n d i r e c t a (por la f o r
-m a c o -m o se a p l i c a la e n e r g í a a e l r o t o ^ . En el tipo -m a s c o —
m u n de m o t o r de C . A . , la e n e r g í a e l é c t r i c a no es l l e v a d a d i —
r e c t a m e n t e al r o t o r ; el rotor r e c i b e su e n e r g í a i n d u c t i v a m e n
te e x a c t a m e n t e de Ja m i s m a m a n e r a en que el s e c u n d a r i o de u n
t r a n s f o r m a d o r r e c i b e su e n e r g í a . Es p o r é s t a r a z ó n que los
-m o t o r e s de éste tipo son c o n o c i d o s co-mo -m o t o r e s de i n d u c c i ó n .
P u e d e ser m u y ú t i l p e n s a r en un m o t o r de i n d u c c i ó n c o m o u n a
-c l a s e de t r a n s f o r m a d o r g i r a t o r i o , en e l -c u á l un d e v a n a d o esta^
c i o n a r i o es c o n e c t a d o a una f u e n t e de C . A . , m i e n t r a s e l o t r o
-d e v a n a -d o m o n t a -d o en u n a e s t r u c t u r a l i b r e p a r a g i r a r r e c i b e su
e n e r g í a p o r la a c c i ó n t r a n s f o r m a d o r a , m i e n t r a s g i r a . En el
-m o t o r de i n d u c c i ó n , el flujo se p r o d u c e por Jn p a r t e e x t e r i o r ,
el e s t a t o r , m i e n t r a s que la p a r t e i n t e r n a g i r a t o r i a de la m á
q u i n a , e l r o t o r es s u a r m a d u r a , e l e s t a t o r e s t á e x c i t a d o p o r
E L C A M P O M A G N E T I C O G I R A T O R I O
1.2 T E O R I A B A S I C A D E O P E R A C I O N
El m o t o r de i n d u c c i ó n d i f i e r e de o t r o s t i p o s de m o t o r e s e n que n o
hay n i n g u n a c o n e x i o n e l é c t r i c a d e l d e v a n a d o d e l r o t o r a n i n g u n a
-f u e n t e de e n e r g í a e l é c t r i c a . E l v o l t a j e y la c o r r i e n t e n e c e s a r i o s
en el c i r c u i t o d e l r o t o r son p r o d u c i d o s p o r i n d u c c i ó n d e l d e v a n a
do d e l e s t a t o r . La o p e r a c i o n d e l m o t o r d e i n d u c c i ó n d e p e n d e de
-la p r o d u c c i ó n de u n c a m p o m a g n é t i c o g i r a t o r i o .
C u a n d o u n d e v a n a d o de e s t a t o r t r i f á s i c o de u n m o t o r d e i n d u c c i o n
es c o n e c t a d o a u n a f u e n t e t r i f á s i c a , t r e s c o r r i e n t e s i n d e p e n d i e n
-tes t i e n d e n a f l u i r u n a en cada u n a de l a s fases d e v a n a d a s . . E s —
tas c o r r i e n t e s e s t a r á n d e s f a s a d a s u n a de la o t r a 120° g r a d o s eléj:
trieos; esto es, que la c o r r i e n t e en la fase A a l c a n z a su
máxijnov a l o r p o s i t i máxijnov o 120° a n t e s que la f a s e B , y la c o r r i e n t e e n la f a
-se B a l c a n z a r á su m á x i m o v a l o r p o s i t i v o 120° a n t e s q u e la f a s e C .
Se d i c e e n t o n c e s que las c o r r i e n t e s e s t á n d e s f a s a d a s en e l t i e m p o
120° a s u m i e n d o la s e c u e n c i a d e fase e l o r d e n A - B - C . L a s o n d a s de
las c o r r i e n t e s e s t á n r e p r e s e n t a d a s e n l a f i g u r a 1 . 1 . L a o p e r a
cion de u n m o t o r de i n d u c c i ó n d e p e n d e d e la d i f e r e n c i a d e v e l o c i
T E O R I A B A S I C A DE O P E R A C I O N DE L O S M O T O R E S D E I N D U C C I O N
F I G U R A 1.1
Polo del estator.
A
F I G U R A 1.3 C O R R I E N T E Y F U E R Z A S I N D U C I D A S E N E L R O T O R BAJO L A
l to'*
186V
P= Z potò*
P a r a 2 p o l o s u n a r e v o l u c i o n
en 1 c i c l o de CA
( 3 6 0 V )
r e v
2 , i . j
P 2 ciclo
P a r a 4 p o l o s u n a r e v .
en 2 c i c l o s de C A (2 X 3 6 0 " E )
S o
P = A p o l o s
E n g e n e r a l p o r c a d a c i c l o de C A h a y 2 / P r e v o l u c i o n e s
rev
c i c l o C A - 2/P
_ , c i c l b s / c a x
•
f (w >
, rev v , 6 0 sfe^ v
El c a m p o y el rotor g i r a n a i g u a l v e l o c i d a d
D e s l i z a m i e n t o : El rotor g i r a a m e n o r v e l o c i
-d a -d q u e e l c a m p o
A la m i s m a
v e l o c i d a d l a s ^ ^ ^ l i n e a s d e
c a m p o n o s e m u e v e n a través d e e s t e conductor del rotor
S e Induce FEM p o r q u e l a v e l o c i d a d d e l c a m p o d e l estator e s m a y o r
q u e l a d e l rotor
= V e l o c i d a d s i n c r ó n i c a fi/A . — V e l o c i d a d d e l rotor
F I G U R A 1.4 EL D E S L I Z A M I E N T O S « N S - N R
N S
N S = V E L O C I D A D S I N C R O N I C A N S « 120 f
P
F « F R E C U E N C I A EN H Z P « í P O L O S
P A R T E S M E C A N I C A S
T o d a s l a s m á q u i n a s e l é c t r i c a s d e b e n t e n e r 2 e l e m e n t o s i n d i s p e n s a ^ —
b l e s , e l f l u j o m a g n é t i c o y los c o n d u c t o r e s q u e c o n d u c e n c o r r i e n t e .
E n e l m o t o r de i n d u c c i ó n el flujo se p r o d u c e p o r la p a r t e e x t e r i o r
e l e s t a t o r , m i e n t r a s q u e la p a r t e i n t e r n a g i r a t o r i a de la m á q u i n a ,
e l r o t o r , e s s u a r m a d u r a .
E L E S T A T O R . E s l a p a r t e e s t a c i o n a r i a de un m o t o r d e i n d u c c i ó n , y
c o n s i s t e de l a m i n a c i o n e s c i l i n d r i c a s de h i e r r o r a n u r a d a s , q u e s o n
c o l o c a d a s e n u n a a r m a z ó n o c a r c a z a . L a r a z ó n p o r la c u a l e l e s t a
tor d e b e s e r l a m i n a d o , es p a r a c i r c u i t a r e v i t a r l a s c o r r i e n t e s p a
-r á s i t a s (de F o u c a l t ) en el h i e -r -r o , q u e g i -r a n p a -r a l e l a s a l o s c o n —
d u c t o r e s y que o r i g i n a n p e r d i d a s . N o o b s t a n t e , l a s c o r r i e n t e s d e
F o u c a u l t a p a r e c e n en las l a m i n a c i o n e s s e n c i l l a s y p r o d u c e n p e r d i s
d a s de c a l o r , l a s p e r d i d a s p o r c o r r i e n t e s de F o u c a u l t d e p e n d e n d e
-l a d e n s i d a d de f -l u j o , de-l n u m e r o de c i c -l o s m a g n é t i c o s por s e g u n d o ,
e l e s p e s o r de las l a m i n a c i o n e s y la calidad del h i e r r o . E l d e v s —
n a d o d e l e s t a t o r se h a c e c o l o c á n d o l o e n las r a n u r a s y s e c a d o e n un
h o r n o , e s t o p a r a q u e el d e v a n a d o q u e d e a d e c u a d a m e n t e a i s l a d o , d e s
p u é s de e s o e s t á l i s t o p a r a ser c o l o c a d o e l e s t a t o r d e n t r o de la
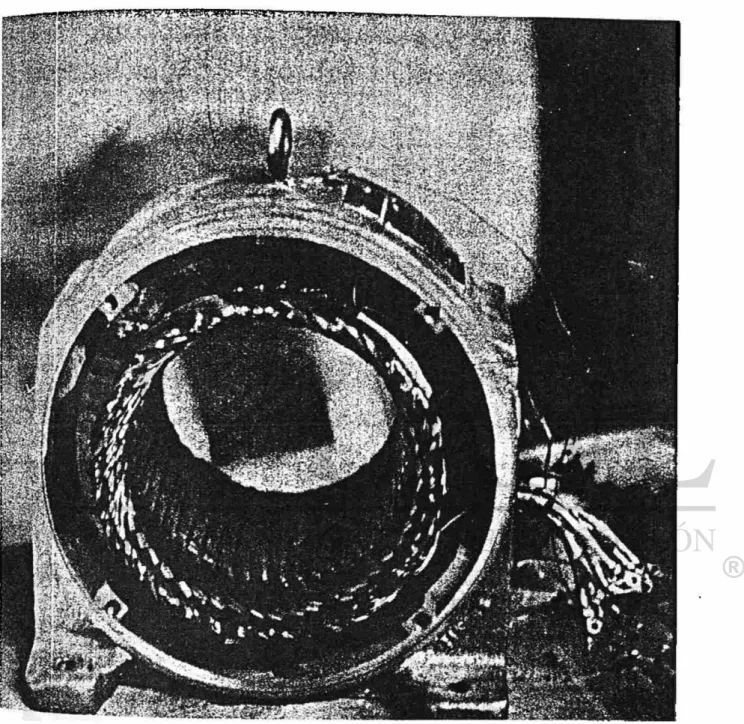
-c a r -c a z a o a r m a z ó n d e l m o t o r . E n la f i g u r a 1.4 se m u e s t r a la -car-ca^
za de u n m o t o r y s u e s t a t o r a n t e s de s e r c o l o c a d o , e n la f i g u r a —
1.5 se m u e s t r a la c a r c a z a de u n m o t o r c o n s u e s t a t o r y a d e b i d a m e n
F I G . 1 . 4 F í g . 1.5
E L R O T O R . E n g e n e r a l h a y d o s t i p o s de c o n s t r u c c i ó n p a r a e l r o t o r
d e u n m o t o r de i n d u c c i ó n : e l j a u l a d e a r d i l l a y e l r o t o r de f a s e
-d e v a n a -d a . E n a m b o s casos se e m p l e a h i e r r o l a m i n a -d o y r a n u r a , q u e
es c o l o c a d o a p r e s i ó n s o b r e una f l e c h a , una m a n e r a m u y c o m ú n de
c o n s t r u i r la j a u l a de a r d i l l a es c o l o c a r e l h i e r r o e n s a m b l a d o e n
u n m o l d e y v a c i a r e l m a t e r i a l c o n d u c t o r f u n d i d o d e n t r o de l a s r a
n u r a s . En las t e r m i n a l e s de las b a r r a s h a y u n o s a n i l l o s q u e c o r
to c i r c u i t a n las b a r r a s en a m b o s l a d o s . L a f i g . 1.6 m u e s t r a u n
-r o t o -r de j a u l a d e a -r d i l l a , e n e l q u e se p u e d e n a p -r e c i a -r los a n i —
F / ¿ . /•* F I G U R A 1.7
E l r o t o r de f a s e d e v a n a d o se e m p l e a c u a n d o e s n e c e s a r i o c o n t r o l a r
la v e l o c i d a d d e l m o t o r o p r o p o r c i o n a r a l a m a q u i n a u n alto p a r de
a r r a n q u e .
U n d e v a n a d o a i s l a d o s i m i l a r a l u s a d o en e l e s t a t o r e s c o l o c a d o en
l a s r a n u r a s d e l r o t o r , y l a s t e r m i n a l e s d e l d e v a n a d o son c o n e c t a
-das a los a n i l l o s r o d a n t e s . P a r a c o n t r o l a r la v e l o c i d a d y el p a r
de a r r a n q u e los a n i l l o s s e c o n e c t a n a r e o s t a t o s m e d i a n t e e s c o b i —
l i a s . L a fig. 1.8 m u e s t r a un r o t o r de e s t e t i p o .
F I G . 1.8 R o t o r de f a s e d e v a n a d a p a r a m o t o r d e i n d u c c i ó n de a l t a
SECUENCIA DE OPERACIONES EN LA FABRICACION DE GRANDES MOTORES
DE INDUCCION DE ROTOR DEVANADO.
STATORS
NUCLEO DE LUMINACIONES EMBOBINADO
LAS LAMINACIONES SON ENSAMBLADAS ^
^
^
S Q N^
^ ^
EN LA .CARCASA (FRAME)
LAS RANURA
NUCLEO DE LAMINACIONES DEL ROTOR
LAS LAMINACIONES SON ENSAMBLADAS EN
LA FLECHA (SFIDER^
EMBOBINADO DEL ROTOR
LAS BOBINAS SON INSERTADAS EN
LAS RANURAS, EL EMBOBINADO ES
Z
UNCHADO
( h i n d i n g w í r e )
CAPITULO 2
DEVANADOS DE C.A. POLIFASICOS.
Los m o t o r e s p o l i f á s i c o s de i n d u c c i ó n t i e n e n d o s d e v a n a d o s , u n o en la
p a r t e m ó v i l o r o t o r . El d e v a n a d o d e l e s t a t o r esta e m p o t r a d o en ranu_
ras en la s u p e r f i c i e i n t e r n a de la a r m a z ó n de la m á q u i n a . E l devana^
do d e l r o t o r p u e d e s e r de d o s t i p o s de fase d e v a n a d a o de j a u l a de
a r d i l l a . E n la m a q u i n a j a u l a de a r d i l l a el d e v a n a d o d e l rotor c o n
s i s t e de b a r r a s de c o b r e o a l u m i n i o e m p o t r a d a s e n r a n u r a s en la c a r
-c a z a de h i e r r o d e l r o t o r y -c o n e -c t a d a s j u n t a s en -cada t e r m i n a l por un
a n i l l o de a l u m i n i o o de c o b r e . E l r o t o r de fase d e v a n a d a es s i m i l a r
a l d e v a n a d o de u n e s t a t o r , las t e r m i n a l e s l i b r e s d e l d e v a n a d o s o n c £
n e c t a d a s a los a n i l l o s d e s l i z a n t e s .
A ) D o s c o n d u c t o r e s h a c e n u n a e s p i r a . Las e s p i r a s c o l o c a d a s tan ínti^
m á m e n t e j u n t a s q u e todas e s t á n e n l a z a d a s p o r el m i s m o f l u j o f o r m a n
una b o b i n a . De tal m a n e r a que hay b o b i n a s de una e s p i r a y de m ú l t i
-p l e s e s -p i r a s .
B ) Los D e v a n a d o s p o l i f á s i c o s g e n e r a l m e n t e son d e d o b l e capa Q s
i? b o b i n a s = $ r a n u r a s . D o s e x t r e m o s de b o b i n a p o r c a d a r a n u r a .
F I G U R A 2 . 2 D E V A N A D O D E D O B L E C A P A
C ) L o s d e v a n a d o s p o l i f á s i c o s de u n a s o l a c a p a , con u n lado de b o b i n a
en la r a n u r a , se u s a en m o t o r e s de i n d u c c i ó n p e q u e ñ o s p e r o m u y —
r a r a m e n t e en los e s t a t o r e s de e s t o s m o t o r e s .
1 9 ' í
L o s a r r o l l a m i e n t o s p o l i f á s i c o s p u e d e n s e r d e l tipo i m b r i c a d o o b i e n on
d u l a d o . E l a r r o l l a m i e n t o p o l i f á s i c o o n d u l a d o se u s a p r i n c i p a l m e n t e —
en r o t o r e s d e v a n a d o s d e tamaño m e d i a n o y m o t o r e s d e i n d u c c i ó n g r a n d e s .
F I G . 2.4 D E V A N A D O I M B R I C A D O F I G . 2 . 5 D E V A N A D O O N D U L A D O
Los a r r o l l a m i e n t o s p o l i f á s i c o s e s t á n a r r e g l a d o s en g r u p o s d e 2 ó m á s bo^
b i n a s s e n c i l l a s . Hay un grupo por p o l o y por fase, p o r esto a l grupo
se le l l a m a g r u p o p o l o f a s e . El n u m e r o tota], de g r u p o s es a p a r e n t e m e n
-te i g u a l a l n u m e r o de fases p o r e l n u m e r o d e p o l o s .
N ú m e r o s d e g r u p o s p o l o - f a s e = m P (ro es n u m e r o d e f a s e s ) . E l grupo p o l o
fase d e t e r m i n a e l n u m e r o de t r a y e c t o r i a s en p a r a l e l o d e l a r r o l l a m i e n t o .
El n u m e r o de b o b i n a s s e n c i l l a s d e l grupo p o l o f a s e s e d e s i g n a r á p o r q ,
-de m a n e r a q u e el n u m e r o t o t a l -de r a n u r a s e s t a r á d a d o p o r :
U n grupo p o l o - f a s e es la u n i d a d b á s i c a d e l a r r o l l a m i e n t o de C . A .
( D E T E R M I N A EL N U M E R O DE T R A Y E C T O R I A S EN P A R A L E L O )
En u n a r r o l l a m i e n t o de 2 c a p a s : todas las b o b i n a s t i e n e n el m i s m o claro
de b o b i n a ,
"El m á x i m o n u m e r o de t r a y e c t o r i a s en p a r a l e l o es T el n u m e r o de p o l o s .
P a r a 2 p o l o s
d e b e n h a b e r 2 g r u p o s p o r c a d a fase
en 3 f a s e s = 6 g r u p o s
C r u p o s = m x p ~ G . P . F .
M = í fases
P = tí p o l o s
en cada fase
íf g r u p o s •= # P,
bobi
ñas
g r u p o Q = if b o b i n a s « fí r a n u r a s
Q = 6 Ranuras, z C B a í . G r u p o s ** tnxp = 6 g r u p o s
OeóJ< Co-fd
m = 3 0 f. » 4 = 1 - J z L
P^r Z polos 6 G r u p o
/
=J 3 ( 1 8 0 ) (F) , ( 1 8 0 X 2 )
'
p ^ ^ ~
b ü' 3 F&V* UJ ~ RF
D e v a n a d o de r a n u r a i n t e g r a l (o c o n g r u e n t e ) £ - n u m e r o e n t e r o
D e v a n a d o d e r a n u r a f r a c c i o n a l (o n o c o n g u e n t ^ £ = n u m e r o f r a c
-c i o n a r i o
C l a r o de b o b i n a - ^ (o e s p a c i a m i e n t o d e b o b i n a )
p a s o p o l a r = § « * <>
P p
d e v a n a d o de paso c o m p l e t o = ^ (paso d i a m e t r a l ^ n o a c o r t a d o )
d e v a n a d o de paso f r a c c i o n a r i o nW< T"' ( a c o r t a d o )
F i g . 2.7 E s t r e l l a d e r a n u r a s
f a s o r i a l .
F i g . 2.9 C u r v a d e la FMI1 d e l d e v a n a d o d e l e j e m p l o a n t e r i o r
(Q=6, P - 2 , d o b l e c a p a )
T
3T
2T,
F i g . 2.10 D i a g r a m a e s q u e m á t i c o c i r c u l a r (3 f a s e s , 2 p o l o s c o n —
T I P O S D E D E V A N A D O S
T I P O S D E
D E V A N A D O S
D E
30 C . A .
I m b r i c a d o
e l m a s u s u a l
e n e s t a t o r e s
R a n u r a i n t e g r a l
( c o n g r u e n t e )
R a n u r a f r a c c i o n a r i a
(no c o n g r u e n t e )
O n d u l a d o , „ . . , R a n u r a i n t e g r a l
(en r o t o r e s d e v a
n a d o s d e m o t o r e s |
de t a m a ñ o m e d i a - I R a n u r a f r a c c i o n a r i a
no y g r a n d e ) *
P a s o c o m p l e t o
P a s o fraccionaric
(más c o m ú n )
P o r su v e l o c i d a d
P o l o c o n s e c u e n t e (2 v e l o c i d a d e s )
( r e l a c i ó n 2 a 1)
M o d u l a c i ó n de p o l o s (de 2 v e l o c i d a d e s )
( c u a l q u i e r r e l a c i ó n )
R o t o r e s
J a u l a a r d i l l a *
J a u l a s i m p l e
D o b l e j a u l a
J a u l a de b a r r a p r o f u n d a
R o t o r d e v a n a d o
(una c a p a en r o t o r e s de m o t o r e s p e q u e ñ o s )
A r r o l l a m i e n t o P o l i f á s i c o s I m b r i c a d o s . L a f i g u r a
2.11 m u e s t r a u n a r r o l l a m i e n t o i m b i r c a d o de d o s p o l o s , 3
fa-ses, 2 c a p a s , c o l o c a d o en 12 r a n u r a s . E l n u m e r o de r a n u r a s
p o r p o l o y p o r f a s e es q • 2, S i se a s i g n a n las r a n u r a s 1 y
2 a la f a s e I, las r a n u r a s 3 y 4 d e b e r á n a s i g n a r s e a la f a s e
I I I , las r a n u r a s 5 y 6 a la fase II, las r a n u r a s 7 y 8 d e nue_
v o a la fase I, e t c . , la r a z ó n d e la s e c u e n c i a I, III, II —
es la s i g u i e n t e .
C o n s i d e r a n d o la b o b i n a d e l l a d o s u p e r i o r en la
ra-n u r a 1, e l lado i ra-n t e r i o r de la b o b i ra-n a s e c o l o c a e ra-n la r a ra-n u r a
7, la d i s t a n c i a e n t r e a m b o s l a d o s de la b o b i n a , e l c l a r o d e
la b o b i n a es 7 - 1 s 6 r a n u r a s d e p a s o . H a y 12 r a n u r a s y 2
p « l o s , o s e a 6 r a n u r a s p o r p o l o , a s í q u e e l c l a r o de la bobjL
n a e s i g u a l .al paso p o l a r
Arrollamiento i m b r i c a d o trifásico, 2 polos. 2 c a p a s , con dos ra-n u r a * pot polo y por f a s e . Bobira-na múltiple
Todas las bobinas tienen el mismo claro de bobina,
y todas las conexiones se colocan en el mismo extremo del
-arrollamiento. Considerando las bobinas en el extremo opues_
to a las conexiones, el lado superior de la bobina 1 se conec
ta con el lado inferior de la bobina 1 + 6 = 7 ? el lado
supe-rior de la bobina 2 con el lado infesupe-rior de la bobina 2 + 6 =
8 y así sucesivamente. En éste caso se supone que la bobina
tiene más de una espira, los conectores cortos C en la c o n e —
xión final conectan la ultima espira de la primera bobina de
un grupo con la primera espira de la segunda bobina del mismo
grupo.
C-ada fase tiene 2 grupos bobina, la fase I consiste
en grupos bobina que finalizan en la, Ib e Ic, Id, igual o c u
-rre en las fases II y III. En cada caso, a o c representan
el principio de un grupo bobina, y b ó d su final.
Los principios y los finales de las tres fases d e
-ben estar desplazadas entre sí 1 2 0 ° eléctricos, o sea que la
desplazadas entre sí 120/30 = 4 ranuras, es p o r eso que si se
-toma la ranura 1 como el principio de la fase I, entonces la
fase II deberá empezar en 1 + 4 = 5 y la fase III en 5 + 4 =
9, entonces la, H a y Illa son los principios de las tres fa.
ses, pero Ic, lie y IIIc pueden tomarse también cono los prin
cipios de la 3 fases ya que también están desplazados por 120
grados eléctricos. Nótese que es el desplazamiento de los
-principios de la fase en 1 2 0 ° eléctricos el que hace la s e —
cuencia de fases I III y II.
D.C. *
!
. i
1.0
II
D e t e r m i n a c i ó n de la dirección de la corriente en u n arrollamiento trifásico en un i n s t a n t e f i j o de t i e m p o
Figura 2.12
Para una conexión en serie de grupos bobina de una
fase, tienen que conectarse dos finales de bobina que
conduz-can corriente en direcciones opuestas entre s£? p o r otra
par-te una conexión en paralelo de grupos bobina, todos los
fina-les que conduzcan corriente en la misma dirección deben conec
tarse juntos. Por lo tanto para una conexión en serie. Ib se
conecta a Id en la fase I, Ilb a lid en la fase II y Illb a
Illd en la fase III. Para conexión en paralelo de grupos bo.
b i n a la se conecta a Id y Ib a Ic en la fase I; lía lid y Ilb
Q — 12 R a n u r a s = 12 b o b i n a s G r u p o s = roxp
Üoble. Capa s.
Cá) (z) =" 6
P 2
ta e 30
G r u p o s = 6 q m p 6 ¿ - „ ^
« J L _
e e 2 b o b i n a s
/
G r u p o s
¿
w = 6 r a n u r a s
p 2 To/e
q
12- 6 R a n u r a s - \jJ (paso c o m p l e t o )
Po¿©
Q • 12 ran - 12 b o b i n a s F a s e a I
P - 2 P o l o s Fase b II
m - 3 0 F a s e c III
G r u p o s = m x p = 6
U f r
O Ha*i
a
n>
o¿
C-Í
.-»H
O*
«J
t j
M
O
4->
O
e
e
cd
M
cd
P.
M
O
i-i
«J
û
m
0)
f—1
0)
TD
X
CO
•H
O
E
«
ÌJ
m
•H
TJ
cd
•i
• IS
-A
-A
F i g . 2 . J 5
/ »• 7
K i * . ? . K»
V
-II
i«
K
5
m
v.
N
?
&
o 4
i—i «
O <í
PL. rç
y V
S
-< •
w
Q
O ?
y s
pi ts>
„
O I t i
o
H
Vi
AS
H I«
PS
¿»k
0
S
*t
1
° > i
55 N
w
o
X ««
V ^
CM
M
M
A r r o l l a m i e n t o s p o l i f á s i c o s o n d u a l d o s . L a f i g u r a
2 . . m u e s t r a u n a f a s e d e u n a r r o l l a m i e n t o o n d u l a d o t r i f á
-s i c o d e 4 p o l o -s , 2 c a p a -s , c o n 2 r a n u r a -s p o r p o l o y p o r f a -s e -s ;
e n l a f i g . 2 . s e m u e s t r a e l a r r o l l a m i e n t o c o m p l e t o . E n
e s t e t i p o d e a r r o l l a m i e n t o s o n n e c e s a r i o s u n m e n o r n u m e r o d e
c o n e x i o n e s q u e p a r a u n a r r o l l a m i e n t o i m b r i c a d o .
F i g . 2 . 1 8 Una fase del arrollamiento ondulado de 4 polos, 3 faees, 2 capas, do« n n u r a s por polo y por fase. Bobina de una sola espira
A r r o l l a m i e n t o J a u l a d e A r d i l l a * L o s r o t o r e s d e
l a m a y o r i a d e l o s m o t o r e s d e i n d u c c i ó n t i e n e n a r r o l l a m i e n t o s
J a u l a d e A r d i l l a d e l o s m o t o r e s q u e c o n s i s t e n d e b a r r a s soli^
d a s n o a i s l a d a s e n l a s r a n u r a s , y e s t á n c o n e c t a d a s e n c a d a
/
/ /
/ /
/ /
<u
Q
m o o,S
o
CS»
<0
op.
o
* « I, V « \M
co
£
M
Q
§
O
vO
-s
Ci
fl
B
O
cu
t f h
M
©J*-MV
m
M
o
O
• H §
fu
O
Ai
OU
sr
•
çy
j l f
N
i«
Arrollamiento ondulado trifásico de 4 polos, 2 caps*, con dos ra-nuras por polo y por fase. Bobina de una sola espira
C O N E X I O N E S Y y 2 Y
E s t a s c o n e x i o n e s s e r e a l i z a n e n m o t o r e s d e i n d u c
c i ó n t r i f á s i c o s q u e t i e n e n s u s d e v a n a d o s d i v i d i d o s y u s u a l
-m e n t e s o n -m o t o r e s d i s e ñ a d o s p a r a o p e r a r a c u a l q u i e r a d e d o s
v o l t a j e s , t a l e s c o m o 2 2 0 o 4 4 0 v o l t s ; e n t a l e s m á q u i n a s 9
-t e r m i n a l e s s o n s a c a d a s y n u m e r a d a s c o m o s e m u e s -t r a e n l a f i
g u r a 2 . 1 7 . P a r a l a o p e r a c i ó n d e l m o t o r d e 4 4 0 v o l t s s e
-u t i l i z a l a c o n e x i ó n Y c o n e c t a n d o e n s e r i e l a s t e r m i n a l e s T 4
y 1 1 , T 5 y T 8 j u n t a s y T 6 y T 9 j u n t a s , q u e d a n d o T I , T 2 y T 3
c o m o l a s t e r m i n a l e s q u e v a n a l a l í n e a d e a l i m e n t a c i ó n . Ta_
r a l a o p e r a c i ó n a 2 2 0 v o l t s s e u t i l i z a l a c o n e x i o n 2 Y c o n l a s
t e r m i n a l e s T 4 , T 5 y T 6 c o n e c t a d a s p a r a f o r m a r u n s e g u n d o p u ¿
to n e u t r o , y u n a l í n e a c o n e c t a d a a l a u n i o n d e T 2 y T 8 y u n a
t e r c e r a l í n e a t e r m i n a l c o n e c t a d a a l a u n i o n d e T 3 y T 9 .
T, T, Tr
E n l a c o n e x i ó n 2 Y m o s t r a d a e n l a f i g . 2 . 1 7 b l a s
-t e r m i n a l e s T A , T 2 y T 6 e s -t á n p e r m a n e n -t e m e n -t e c o n e c -t a d a s f o r
m a n d o u n s e g u n d o p u n t o n e u t r o . C u a n d o e l m o t o r e s a r r a n c a
-d o , s o l o u n a s e c c i ó n -d e l -d e v a n a -d o e s u s a -d a c o n e c t a n -d o T i , T 2
y T 3 a l a f u e n t e t r i f á s i c a , p o r e j e m p l o 2 2 0 v o l t s ; d e s p u é s
e l m o t o r s e a c e l e r a h a s t a s u v e l o c i d a d , l a s d o s s e c c i o n e s
-e s t á n j u n t a s -e n p a r a l -e l o c o m o s -e -e x p l i c ó a n t -e r i o r m -e n t -e .
C O N E X I O N E S A "í 2 A
E n l a f i g u r a 2 . 1 8 s e m u e s t r a e l d e v a n a d o d e u n
m o t o r q u e p u e d e c o n e c t a r s e e n J^ y 2 A m o s t r á n d o s e l a n u m e r a
c i ó n s t a n d a r d d e l a s t e r m i n a l e s . P a r a l a c o n e x i ó n A s o l a
-m e n t e e s n e c e s a r i o c o n e c t a r l a s t e r -m i n a l e s T 4 y T 7 , T 5 y T 8
y f i n a l m e n t e T 6 y T 9 , q u e d a n d o c o m o t e r m i n a l e s p a r a l a l í
-n e a d e a l i m e -n t a c i ó -n l a s t e r m i -n a l e s T I , T 2 y T 3 .
P a r a l a c o n e x i ó n 2 4 ® s n e c e s a r i o u n i r l a s t e r m i —
n a l e s T I , T 6 y T 7 , d e l a m i s m a m a n e r a s e u n e n l a s t e r m i n a
-l e s T 2 , 1 4 y T 8 y f i n a -l m e n t e T 3 , T 5 y T 9 , d e j á n d o s e c o m o t e r
La numeración estandard en delta y doble delta (NEMA) en
VOLTAJE
LINEAS
UNIONES
CONEXION
BAJO
T
1
T2 TS
(3,9,5) (8,4,2) (1,6,7)
DOBLE
DELTA
ALTO
T
1
T2 TS
(6,9) (4,7) (8,5)
DELTA
SIMPLE
D i a g r a m a s e s q u e m á t i c o s p a r a d e v a n a d o s t r i f á s i c o s
E j e m p l o : m - 3 0 P = 4 p o l o s
G r u p o s - p o l o - f a s e « m p = 12
C B
A .
B t 6
c \
5\
B
/
A
v
4f
- c
y*
Fig.t*sArreglo de g r u p o s
p a r a u n d e v a n a d o 01=3 fíi
ses P = 4 p o l o s
F i g . 2.2$' c o n e x i ó n e n
s e r i e (fase A ) m = 3 0
P = 4 p o l o s
F i g . ^ . z á " D i f e r e n t e s f o r m a s d e h a c e r la c o n e x i ó n en p a r ^
2. 2 4 D e v a n a d o m = 3 0 , P = k p o l o s , c u a t r o trayec^
t o r i a s en p a r a l e l o (fase A )
F i g . 2.¿i C o n e x i ó n de 9 - t e r m i n a l e s p a r a c o n e x i ó n Y - 2 V m = 30
P = 2 p o l o s .
!
y
i
F i g . 2 . 3 ^ C o n e x i ó n A - 2 A con 9 - t e r m i n a l e s , m « 30 P «• 2 p o l o s
CAPITULO 3
La FEM inducida en un Devanado de C.A
E e f = 4 . 4 4 f Ñ
c
'<
c
0 10
- 8
f —» c p s , H z
Nc- » # v u e l t a s (por b o b i n a )
0 -*»Maxwells (flujo p o r p o l o )
E - * v o l t s (por b o b i n a )
E e f « 4 . 4 4 f N 0
c
0 -••Webers f -*-HzE -t* v o l t s
Esta e c u a c i ó n f u e d e r i v a d a b a j o las s i g u i e n t e s c o n s i d e r a c i o n e s :
1) T o d a s las Nc v u e l t a s de la b o b i n a e s t á n e n l a z a d a s c o n el m i s m o flujo en
c u a l q u i e r i n s t a n t e .
2 ) E l p a s o de la b o b i n a es i g u a l a e l p a s o p o l a r ( 1 8 0 ° E ) ( d e v a n a d o d e p a s o
c o m p l e t o ) . E n e s t e c a s o el m á x i m o f l u j o e n l a z a d o p o r l a b o b i n a es i g u a l
a el f l u j o t o t a l p o r p o l o .
3 ) La d i s t r i b u c i ó n d e l f l u j o es s e n o i d a l
L a fem i n d u c i d a e n u n a v u e l t a d e u n a b o b i n a e s t á en f a s e c o n t o d a s las o
tras v u e l t a s d e la b o b i n a p u e s t o q u e e s t á n e n l a z a d a s p o r e l m i s m o f l u j o
-en c u a l q u i e r i n s t a n t e .
L o s f e m ' s i n d u c i d o s e n las b o b i n a s q u e f o r m a n cada g r u p o i n d i v i d u a l e s t á n
p o r e l á n g u l o (Xs (ángulo d e r a n u r a )
e j e m p i o :
m = 3 0
q = 4
« o - ( 1 8 0 ) F
-( 1 8 0 )
Q m q
<Xs =
180
( 3 ) ( 4 )= 1 5 ° E / R í l N
Q - q M P q
0
WP
ino ?
qv*?
F a c t o r de d i s t r i b u c i ó n =
F a c t o r d e d i s t r i b u c i ó n =
F/<? 3.1
fem r e s u l t a n t e
¿7 d e las fern's d e las b o b i n a s i n d i v i d u a l e s
E r
« Kdq E<
Kd -b o -b
A7
Por lo tanto e l v a l o r efectivo de la feni p a r a u n g r u p o f o r m a d o p o r q b o b i n a s
sera:
E g = q K d Ec = 4 . 4 4 fNf¿Cí(j
10
- 80 maxuK'fe
E - w v o l t s
Ng q N (las e s p i r a s o v u e l t a s d e un g r u p o son q v e c e s la d e u n a
-b o -b i n a ) .
E g » 4 . 4 4 f N g Kd 0 X 1 0
- 8
0 M a x « *E g v o l t s ( v o l t a j e p o r g r u p o )
S i N = n ú m e r o d e e s p i r a s c o n e c t a d o s en s e r i e p o r f a s e , e n t o n c e s N s e r á i g u a l
a N g v e c e s e l n ú m e r o d e g r u p o s c o n e c t a d o s en s e r i e e n u n a f a s e .
Y l a f e m p o r f a s e s e r á : —
E = 4 . 4 4 f N K d 0 X 1 0 - 8 v o l t s
E - * - v o l t s ( p o r f a s e )
f - > - c p s , H z
N N ú m e r o de v u e l t a s en s e r i e p o r f a s e
0 - * M a x w e l 1 s ( p o r p o l o )
U N A T R A Y E C T O R I A
N= P N g
N= Pq N c
"a" T R A Y E C T O R I A S EN P A R A L E L O
Un g r a n v a l o r d e g d e c r e c e l a s a r m ó n i c a s d e l a f e m ' s . E l á n g u l o (Xs e n l a s a r
-m ó n i c a s s u p e r i o r e s a l a f u n d a -m e n t a l a u -m e n t a e n g r a d o s e l é c t r i c o s e n p r o p o r c i ó n
a l o r d e n d e l a a r m ó n i c a . S i es m a y o r e l d i a g r a m a v e c t o r i a l de l a s a r m ó n i
-cas t e n d r í a l o s v a l o r e s Ec n muy d e s f a s a d o s y l a r e s u l t a n t e s e r f a m e n o r ( d i s m i
5 * ^
Fig. 3.3 Efecto de q= # Bob en las a r m ó n i c a s de l a s fem's
G r u p o
E l f a c t o r de p a s o K p
E n l a m a y o r í a d e l a s M S q . d e C . A . ( s i n c r ó n i c a s y a s i n c r ó n i c a s ) e l c l a r o d e l a
b o b i n a es m e n o r q u e e l p a s o p o l a r ( e l d e v a n a d o e s d e p e s o f r a c c i o n a r i o )
A l g u n a s d e l a s r a z o n e s d e l o s d e v a n a d o s d e p a s o f r a c c i o n a r i o s o n :
a ) D e c r e c e l a l o n g i t u d d e l o s e x t r e m o s d e c o n e x i ó n , d e c r e c i e n d o l a c a n t i d a d de c o b r e u t i l i z a d o .
b ) R e d u c e l a s r e a c t a n c i a s d e l a s r a n u r a s ( d i s p e r s i ó n ) y m e j o r a l a f o r m a de -l a f e m de -l o s g e n e r a d o r e s (més c e r c a n a u n a o n d a s e n o i d a -l ) .
c ) P u e d e n s e r e l i m i n a d a s c u a l q u i e r a r m ó n i c a d e l a o n d a d e v o l t a j e como b i e n -r e d u c i -r l a s o t -r a s a -r m ó n i c a s .
d ) E n e l c a s o d e un m o t o r s e p u e d e n e l i m i n a r l o s p a r e s p a r á s i t o s p r o d u c i d o s
-p o r l a s a r m ó n i c a s .
'aso Fraccionario aso Completo
Paso c o m p l e t o ( w ) ( f f / Y ) « 1 8 0 ' E (W - T )
> »
ti |
E r = 2 E 1 = 2 E2
E l = E2 « E
n<s 3 ¿
ER = 2 E
T • # r a n u r a s c u a n d o h a y p a s o c o m p l e t o tf * ° E « 1 8 0 ° E
ÍÍ
r
= < * sE ( p a s o f r a c c ) * Kp ( E p a s o c o m p l e t o )
Kp - ( c u a n d o h a y p a s o f r a c c ) E ^ ¡ c u a n d o h a y p a s o c o m p l e t o )
Kp a _ R f Z < = i t ? _ ^
P a s o f r a c c i o n a r i o W ( ^ / T ) < 1 8 0 ° E ( W < T )
I E l = / E l / = / E2/ ( n o e n á n g u l o )
TIG 9>7
/ E l / « / E 2 / ( T r i á n g u l o i s f i c e l é s )
( H / 2 ) ( 1 Í / T ) Ran o E / R a n = ° E
S e n
( í ) ( í ) =
E li
2 E
.w rf
z r
Kp = 2 E 1 Sen =
2 E l
Kp = Sen %
Tomando en c u e n t a e l f a c t o r de p a s o ( K p ) y e l f a c t o r de d i s t r i b u c i ó n ( K d ) e l -fem i n d u c i d a en un d e v a n a d o de C . A . c o n N v u e l t a s en s e r i e p o r f a s e p a r a f l u j o s i n u s o i d a l e s .
NKdp N ú m e r o de v u e l t a s e f e c t i v a s p o r f a s e E v o l t a j e p o r f a s e
0 f l u j o p o r p o l o en m a x w e l l s ( m á x i m a ) N v u e l t a s p o r f a s e
f f r e c u e n c i a en H z .
D i s t r i b u c i ó n No s e n o i d a l d e l f l u j o ( B ) a l o l a r g o de l a s u p e r f i c i e de l a a r m a -d u r a .
L o s m o t o r e s de i n d u c c i ó n p o c o : s a t u r a d o s y l o s m o t o r e s c i l i n d r i c o s de l a s m á q u i n a s s i n c r ó n i c a s t i e n e n una d i s t r i b u c i ó n d e l f l u j o c e r c a n a a l a s e n o i d e , l a m á q u i n a — s i n c r ó n i c a de p o l o s s a l i e n t e s t i e n e una d i s t r i b u c i ó n d e l f l u j o p l a n a :
Las fems a r m ó n i c a s s o n i n d e s e a b l e s . A c o r t a n d o l a s b o b i n a s s e r e d u c e n l a s a r m ó n i -cas t a m b i é n un v a l o r g r a n d e de q r e d u c e l a s a r m ó n i c a s .
E = 4 . 4 4 f N K d K p 0 X 1 0 ~8 v o l t s 0 m a x w e l l s
Kw = Kdp « KdKp f a c t o r d e l d e v a n a d o
E = 4 . 4 4 f N K d p 0 X 1 0- 8 v o l t s
1 0 2 0 1 2 1 3 3 3
P r o b l e m a
P - 24 f = 60 H z m * 30
Q = 2 1 6 R a n u r a s 18 c o n d / r a n . d o b l e c a p a
3 Y en p a r a l e l o r / £ . 3 .,í
J j U 0 . 7 7 8
Ev a c f o = 2 3 0 0 v o l t s ( l i n e a )
0 p ( e n v a c í o ) * ?
^ l í n e a p a r a l e l o
E « 4 . 4 4 f N K d p 0 X 1 0
Q = 2 1 6 r a n * 2 1 6 b o b i n a s
g r u p o s * mxp - ( 3 ) ( 2 4 ) = 7 2 g r u p o s g r u p o s - 7 2 s 24 g r u p o
f<\se 3Y 3 f a s e 3 Y
a - l ü » 3 b o b i n a s
q 7 2 g r u p o
1 8 cond _ 1 8 c o n d a _ v u e l t a s
r a n . b o b i n a ' b o b i n a
Kp = Sen w f f ¡ 1 T
Kp = Sen ( . 7 7 8 ) ( 9 0 ° E ) Kp « Sen
70°
Kp = 0 . 9 4
Kd = s e n q C j ) q s e n oc
2
¿ v u e l t a s / v u e l t a s \ / 3 J o b \ B J g r u p o V b o b i n a s ) V g r u p o ]
2 7 v u e l t a s g r u p o
A / j r v u e l t a s = „
* g r u p o
N - a g r u p o 0 7 v u e l t a s
n " 0 f a s e g r u p o
N = 2 1 6 v u e l t a s f a s e
s = 1 8 0 p ( 1 8 0 ) ( 2 4 ) ! K d = s e n 3 ( 1 0 ) - s e n 30
~ 0 " ¿16 , . "* o
= 216
v u e l t a s f a s e3 sen 1 0 3 S e n 1 0 '
0 . 5 3 ( 0 . 1 7 4 )
Kd « 0 . 9 6
¿A/fapX'f*
Á -
¿ 3¿>Q / ü s
r ~~ Vf (¿*) t*") (o.9o?«) X/S*
3./o
(j
s
Jz
A ^ "
¿~ - (¿o)(o-?v)(ú-9t)(Z-n y/aOf/o'*) Cszy)
DEVANADOS DE DOS VELOCIDADES.
En muchas aplicaciones de los motores de inducción
se requieren dos o más velocidades, o un rango continuo ajus
table de velocidades. La velocidad del rotor de un motor de
inducción puede ser ajustada de tres maneras.
1. Variando la frecuencia del voltaje de alimenta
ción.
2. Variando el deslizamiento
3. Cambiando el numero de p o l o s .
En ésta sección se tratará la variación de la
velocidad cambiando el numero de polos p o r medio de los d e v a
-nados del polo consecuente (o conmutables).
En éste tipo de conexión con sólo 6 terminales ex
teriores se tiene la posibilidad de trabajar con dos veloci
dades cuya relación es 2:1 con un cambio de polos 1:2 en un
solo devanado. Existen 2 técnicas de conexión con las s i
-guientes características:
Analizaremos el principio básico de operación con
una de las técnicas de conexión de los grupos de polo fase.
La idea tener un cierto número de polos en
co-nexión serie y en una coco-nexión en paralelo tener la mitad de
los polos invirtiendo la corriente en la mitad del devanado.
En la figura 3. M r.e representa la conexión de los grupos
fase para la fase A, siendo similar para las fases B y C .
P-S
bi
Figura 3. /'
A - A A - A
Figura 3.
En la fig.
$.13
• que se muestra la conexión en pa.
ralelo, conectanto Ti y el neutro, y alimentando por X, se
-forman 4 polos,correspondiendo esta conexión a alta v e l o c i —
dad. Es inportante observar que la corriente se invirtió en
los grupos -A.
Como y a se mencionó anteriormente, con un switch,
es posible tener las dos conexiones, y por lo tanto se p u e
-den operar el motor a dos diferentes velocidades, con la
ve-locidad más alta cuando se tiene la conexión standar y a la
mitad de esa velocidad con la conexión de polos c o n s e c u e n —
4.^'fn on^éMA)
A
pig. 3.14 C o n e x i ó n 2 V e l o c i d a d e s H P ' S « C T E ' S ( T é c n i c a Ú 2 )
M
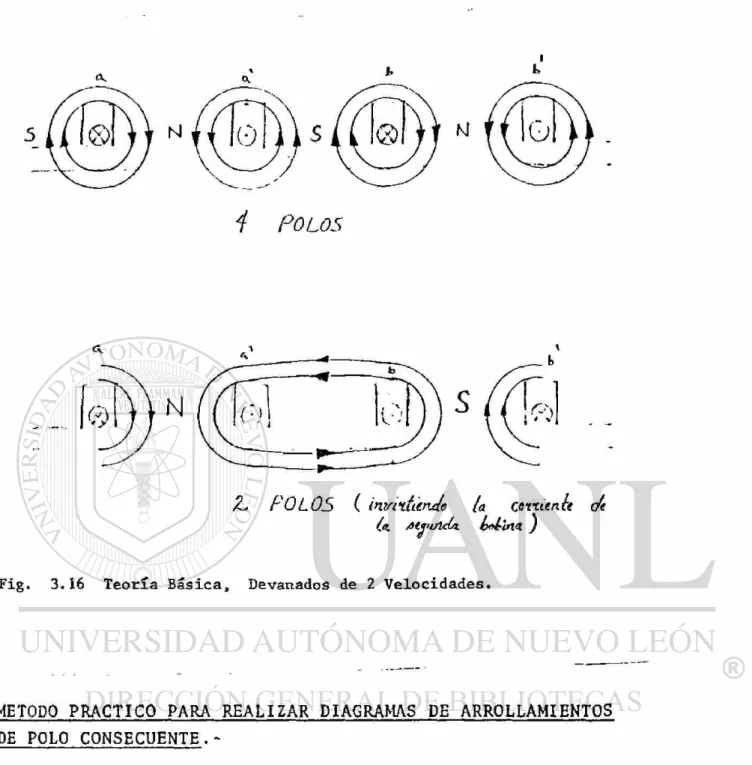
4 POLOS
Z> POLOS ( inyttáeru/o (a certienée c/e
(a. ¿ej'vtcùi ¿yrilna )
Fig. 3.16 T e o r í a B á s i c a , D e v a n a d o s de 2 V e l o c i d a d e s .
METODO PRACTICO PARA REALIZAR DIAGRAMAS DE ARROLLAMIENTOS
DE POLO
CONSECUENTE.-Antes de entrar en el tema, haremos las siguientes importantes
advertencias.
1. Cuanto menor es el número de polos de un motor, tanto más
ancho debe ser el camino previsto por el flujo magnético.
Por lo tanto sn motor cuyo yugo del estator está
calculado, por ejemplo para 8 polos, no admitirá en general el
-cambio de 4 polos sin graves consecuencias en su funciona
2. Todo cambio de polaridad del arrollamiento del estator exige
analogo cambio en el rotor. Si este está devanado, será
ne-cesario modificarlo con la nueva polaridad.
3. Si se trata de rotor en jaula de ardilla no requiere
modifi-cación, sin embargo hay que tener presente que para cada
número de polos, entre el núnúmero de ranuras del estator y r o
-tor debe existir una relación conveniente.
4. Debe tenerse en cuenta el claro de bobina del estator, de tal
manera que sea el más óptimo en ambas velocidades.
Caben pues, desagradables sorpresas si no se toma en considera
ción lo anterior.
PROCEDIMIENTO:
a).Se hacen los cálculos en el menor número de polos.
Q= 48 ranuras = 48 bobinas.
Doble capa imbricado.
m
s30 w= 7 ranuras.
P= 4/8 Polos.
GRUPOS= mxp = 12
q_.
Q 48 _ 4 bobinas
mp 12 grupo
Si no se consideran las armónicas se toma como el claro de la
bobina igual al paso polar (diametral) correspondiente al m a
-yor número de polos. Si ello no fuese posible, se tomará
el-paso más próximo al el-paso diametral mencionado.
T' Q 48 * 6 ranuras w» 7 ranuras " es adecuado.
' " , P " 8
En la fig.
~5.i7
se encuentra el diagrama completo con la numeración
de terminales adecuado, tomando: Los principios de cada bobina con
FASE "A"
FASE "B"
FASE "C"
1
c y -
9( y -
1 71 0 1
2 109 — 10 1 1 7 — 18
1 0 2 — 3 110 — 11 118 — 19
1 0 3 4
111 ^ — 12 119 — 20
104 — 25 1 1 2 — 33 1 20 41
1 25 26 1 33 34 141 42
126 — 27 1 34 — 35 142 — 43
12 7 28 1 35 36 143 — 44
1 2 8
_ _ 3 7 - ^ ) 1 3 6 — 45 - { í ^ 144 — 5 (T
137 38 145 — 46 105 — 6
138 — 39 146 — 47 106 7
139 — 40 147 — 48 107 — 8
140 — 13 148 — 21 108 — 29
1 1 3
14 1 21 — 22 129 30
11 4 15 1 22 — 23 130 — 31
115 16 123 24 131 — 32
1 1 6 — ( g ) 124 — ( g ) 132
Una vez terminada la conexión de las bobinas individuales
del motor se harán las conexiones en
A y
2Y para par
constante y Y-2Y para par variable.
El voltaje se aplicará con el Variac incrementándolo
T
4—».1 28 y 37
Tg—»• 136 y 45
T
6_ * 1 4 4 y S
N
a— » . 1 1 6
N
b_ ^ 1 2 4
N
c— • 132
VELOCIDAD
LINEAS
UNIR
CONEXION
VOLTS
BAJA
(900 rpm)
T1
T2
T3
Delta ( a ;
Simple
110
(línea)
ALTA
(1800 rpm)
T4
T5 Te
T1
T2
T3
Doble (ZV-;
Estrella
110
(Línea)
f 4
CONEXION PARA 1 K
PAR VARIABLE C J
VELOCIDAD
LINEAS
UNIR
CONEXION
VOLTS
(Línea)
BAJA
(900 rpm)
T 1 T ? T3 Y i t o
ALTA
(1800 rpm)
T4 TS ^ T1
T2 TS
ZY
110
CONEXION PARA
PAR CONSTANTE
1
T.
1
-9
s s s
1 lot 'l
olten
ul
m 'l. t
lt•l.
ul
'^'...wl-m
r, v
»»••a
ail
• ulk v.» •11
•»•tl
•r—<
S S
s «»—f
1
r, i,
àll
Otlitr»
M
' l . V . 'fei»'«
111
•H
OlW*
Ul
V«.V»
4
«Ip
Tl<
Ul
Otwra
' l l . v v l .
•»—«