Ivel optim
I
NSTITUTO
P
OLITÉCNICO
N
ACIONAL
E
SCUELAS
UPERIOR DEI
NGENIERÍAM
ECÁNICA YE
LÉCTRICAU
NIDADZACATENCO
DISEÑO DE UNA
PRÓTESIS
TRANSTIBIAL
AMORTIGUADA
PROYECTO DE INVESTIGACIÓN
QUE PARA OBTENER EL TÍTULO DE
DIRIGIDA POR:
DR. CHRISTOPHER RENÉ TORRES SAN MIGUEL DR. JUAN JOSÉ MUÑOZ CESAR.
P R E S E N T A N:
JOSÉ ANTONIO GARCÍA MERINO CARLOS ENRIQUE RODRÍGUEZ DÁVILA
MÉXICO,D.F.MAYO DEL 2012
INGENIERO EN CONTROL Y
Contenido
Contenido
ii
Agradecimientos
A mi madre que siempre ha sido el ancla para sostenerme en cualquier aspecto de mi vida. Algún día comprenderá lo orgulloso que estoy de ella.
A mi abuela que me ha cuidado y ensañado todo lo bueno que se necesita para avanzar en la vida. A mi tía Concepción que siempre está cerca y me acercó a la lectura.
A mi novia y amiga Mariana por brindarme su apoyo incondicional. A mi tío Eduardo y mi tía Norma por siempre confiar en mí.
A mi Hermana por enseñarme disciplina y darme protección.
A mis mejores amigos: Eduardo Merino, Alejandro Bibbins, Alejandro Serafín y Rogelio Magnot, por hacer mi vida siempre un lugar seguro y de aprendizaje continuo.
Y en general a toda la gente que me ha acompañado a lo largo de estos 25 años de mi vida, haciéndola divertida y agradable cada día.
Cuanto más frágiles y más hidalgos se comportaban, era mayor su sentimiento unos de otros. Ya no les importaba su vida misma, sino la de sus compañeros. Preferían sufrir el suplicio del dolor, que el tormento de ver sufrir a sus amigos. Y esa era la cadena más gruesa y más fuerte que los unía, y a la vez la que más poderosos los hacía.
Contenido
iii
Agradecimientos
A Dios por haberme permitido llegar hasta este punto y haberme dado salud y guiarme en todo momento.
A mis padres Imelda y Enrique por brindarme su apoyo y experiencias, por Sus los valores que me inculcaron, por todo el esmero Y dedicación que me brindaron son el soporte fundamental durante toda mi formación.
A mi familia por ayudarme a llegar donde estoy. A todos mis hermanos por la motivación,
Tolerancia y consejos sé que cuento con ustedes
A Elizabeth por brindarme su tiempo, paciencia y perseverancia. A todos mis amigos que estuvieron recorriendo este camino conmigo.
Vivimos de logros no de años; de pensamientos no de la respiración; de sentimientos, no de cifras en una carátula. Deberíamos contar el tiempo en latidos. Vive más quien piensa más, siente lo más noble y actúa de la mejor manera.
-F.J. BAILEY
Orgullosamente Politécnico ¡¡
Contenido
iv
Índice General
Índice General iv
Índice de Figuras viii
Índice de Tablas xii
Resumen. xiii
Abstract. xiii
Objetivo General. xv
Objetivos específicos xv
Organización de la tesis xvi
Glosario xvii
Justificación. xviii
Hipótesis xix
I. Generalidades 1
I.1 Antecedentes 2
I.2 Estado del arte. 2
I.4 Planteamiento del problema. 20
II. Introducción 22
II.1 Materiales 23
II.2Anatomía del tobillo 26
II.2.1 Máximo desplazamiento. 26
II.2.2 Planos anatómicos 27
II.3 Articulación del pie 29
II.3.1 Articulación del Tobillo 30
II.4 Tendón rotuliano 32
II.5Amputaciones. 32
II.5.1 Enfermedad vascular periférica 32
II.5.2 Lesiones y fracturas. 33
II.5.3 Infección. 36
II.5.4 Tumores 36
II.6 Niveles de amputación 36
II.7 Biomecánica 37
II.7.1 Centro de masa 38
II.6.1.1 Estudios de Dempster y Clauser. 38
II.7.2 Eslabones corporales 40
Contenido
v
II.7.4 Movimientos de la articulación del tobillo 41
II.8 Marcha 42
II.9 Fuerzas sobre la pierna. 44
II.9.1 Mecánica del pie 45
II.10 Sumario. 48
III. Introducción. 50
III.1 Amortiguadores. 50
III.1.1 Percepción y Tolerancia del Cuerpo Humano a las Vibraciones. 51
III.1.3Fluidos Magnetoreológicos 53
III.1.4 Amortiguadores Magnetoreológicos 54
III.1.5 Obtención del Fluido Magnetoreológico 55
III.1.5.1 Características típicas del Quadromatic 56
III.1.5.2 Partículas de material magnético 56
III.2Campo Magnético 58
III.2.1 Núcleo Magnético con Entrehierro 59
III.2.2 Datos Magnéticos de Aleaciones Ferromagnéticas. 60
III.2.3Diseño del electroimán. 61
III.2.4 Circuito protector de electroimán 64
III.3 Mecánica para el diseño de los materiales. 65
III.3.1 Esfuerzo 65
III.3.2Deformación Unitaria Normal 66
III.3.3 Ley de Hooke y modulo de elasticidad 66
III.3.4 Cambio de longitud por carga axial 66
III.3.5Esfuerzos en el Pistón 67
III.3.6 Recipientes a Presión de Pared Delgada. 68
III.3.6.1 Esfuerzo circunferencial 68
III.3.6.2 Esfuerzo longitudinal 69
III.3.6.3 Diseño del contenedor del amortiguador. 69
III.4 Diseño del Amortiguador 70
III.4.1 Diseño del Pistón 70
III.4.2 Diseño del tanque 75
III.6 Pie protésico. 78
III.6.1 Dimensiones de la Pieza Rotatoria. 81
III.6.2 Perno de Pie. 82
III.7 Adaptador. 83
Contenido
vi
III.5 Características de un Resorte 86
III.5.4 Diseño del Resorte. 87
III.8 Socket. 89
III.9 Montaje de la Prótesis. 93
III.9 Leyes Físicas 93
III.9.1 Leyes de Newton 94
III.9.1.1 Primera ley de Newton 94
III.9.1.2 Segunda ley de Newton 94
III.9.1.3 Tercera ley de Newton 94
III.9.2 Ley de Hooke 94
III.9.3 Ley de Amortiguadores 95
III.9.3.1 Obtención de la constante de amortiguación. 95
III.9.4 Modelo Matemático. 99
III.10 Sumario. 105
IV. Introducción. 107
IV.1 Material electrónico. 107
IV.1.1 Baterías. 107
IV.1.2 Interruptor de límite 107
IV.1.3 Celda de carga 108
IV.1.4 Interruptor. 108
IV.1.5 Supresor. 108
IV.1.6 Amplificador. 108
IV.1.7 Lazo de corriente. 108
IV.2 Accionado del Circuito de Control. 108
IV.2.1 Interruptor de límite. 109
IV.3 Circuito de Control 109
IV.3.1 Montaje sobre la Prótesis 111
IV.4 Gasto de Potencia. 114
IV.5 Sumario. 114
V. Introducción. 116
V.1 Simulación en Ansys 116
V.2 Costos 120
V.3 Conclusiones 122
V.4Trabajos futuros. 123
Referencias 124
Contenido
vii
Anexo 1 128
Anexo 2 129
Anexo 3 130
Anexo 4 131
Anexo 5 132
Anexo 6 134
Contenido
viii
Índice de Figuras
Figura I.1 Aplicaciones de prótesis 1
Figura I.2 Bosquejo de prótesis endoesquelética. 3
Figura I.3 Prótesis C-Leg® 4
Figura I.4 Esquema de la prueba con el amortiguador magnetoreológico. 4 Figura I.5 Gráficas de simulación en el programa de cómputo Simulink®. 5
Figura I.6Bocetos de prótesis con alambres de Nitinol. 6
Figura I.7 Prototipo final de prótesis con alambres de Nitinol. 6
Figura I.8 Sistema de 5 eslabones para prótesis. 7
Figura 1.9 Curva de flujo del fluido magnetoreológico para diferentes intensidades de corriente. 8 Figura I.10 Curva de viscosidad en función de la rapidez de deformación para diferentes
intensidades de corriente. 8
Figura I.11 Diseño de prótesis transfemoral 10
Figura I.12 Prótesis de pie dinámico 11
Figura I.13 Componentes del pie, por el programa de computo ANSYS 12
Figura I.14 Prótesis Flex-Footterminada. 13
Figura I.15 Prótesis incluida en el análisis. 14
Figura I.16 Gráficas de momentos del tobillo 15
Figura I.17 Prótesis de pie dinámico 16
Figura I.18Prótesis RHEO KNEE® 16
Figura I.19 El DynamicMotion 17
Figura I.2201E56 Axtion® 18
Figura II.1 Impacto en el brinco de una persona. 27
Figura II.2 Planos anatómicos 28
Figura II.3Vista anteroexterna del tobillo y pie 28
Figura II.4 Vista anterointerna del tobillo y pie 29
Figura II.5 Ejes del complejo articular del pie 29
Figura II.6. Articulaciones del pie 30
Figura II.7 Radiografía de la articulación del tobillo 31
Figura II.8 ligamento tibioperonal inferior posterior. 31
Figura II.9 Tendón rotuliano. 32
Figura II.10 Supinación-rotación externa. 34
Figura II.11 Pronación-abducción en la sidesmosis. 34
Figura II.12 Pronación-rotación externa 34
Figura II.13 Supinación-aducción. 35
Contenido
ix
Figura II.15 Fractura directa del tobillo tipo II 35
Figura II.16 Fractura directa del tobillo tipo III 36
Figura II.17 Niveles de amputación 37
Figura II.18 Porcentaje de ubicación del centro de masa por miembro 39 Figura II.19 a) Flexión del tobillo b) Ángulos de flexión. 42
Figura II.20 ciclos de la marcha 42
Figura II.21 longitud de paso completo y longitud de paso 43
Figura II.22 Duración del ciclo de la marcha. 43
Figura II.23 fuerzas vectoriales en el apoyo. 44
Figura II.24 a) Fuerzas M y R b) Fuerza R resultante 45
Figura II.25 Fuerzas ejercidas sobre el pie. 46
Figura II.26 Diagrama de cuerpo libre del pie. 47
Figura III.1Amortiguador hidráulico telescópico 52
Figura III.2 Estado desmagnetizado del fluido magnetoreológico 54 Figura III.3 Estado magnetizado del fluido magnetoreológico 54
Figura III.4 Amortiguador magnetoreológico 55
Figura III.5 a) Tamaño variado de las limaduras. b) Filtrado de la limadura 57
Figura III.6 Limadura final. 57
Figura III.7 Núcleo ferromagnético con entrehierro. 59
Figura III.8 Áreas en un núcleo magnético 60
Figura III.9Vista superior, frontal y lateral del electroimán. 63 Figura III.10 Circuito supresor de voltaje transitorio. 65
Figura III.11 Alargamiento de barra uniforme 67
Figura III.12Actuador bajo una carga F 68
Figura III.13 Medidas de prótesis en el plano sagital. 70
Figura III.14 Centro de masa del tanque en función del pistón. 71 Figura III.15 Medidas del vástago y pieza completa (base del pistón y vástago) 73 Figura III.16 Vista superior y frontal del actuador del amortiguador. 74 Figura III.17Medidas del las alturas del contenedor del amortiguador. 75 Figura III.18 Prototipo de amortiguador y pistón ensamblado. 76 Figura III.19Vista superior, frontal e inferior del contenedor del amortiguador. 77 Figura III.20 Tapa rosca del tanque del amortiguador con empaque. 78
Figura III.21 Pie protésico con pieza rotatoria. 78
Figura III.22 Pie, pieza rotativa y ángulos de flexión. 79
Figura III.23 Vista lateral de la cámara del pie. 79
Contenido
x Figura III.25Vista superior y frontal de la pieza rotatoria 81 Figura III.26 Vista Frontal, Superior y lateral del perno del pie. 82 Figura III.27 a) Propuesta de adaptador para prótesis transtibial, b) prototipo de adaptador para
prótesis transtibial. 83
Figura II.29Vista frontal, superior y lateral del acoplador. 84 Figura III.30 Vista Frontal, Superior y lateral del perno del adaptador. 85 Figura III.31 Puntos en cuenta para el diseño de un resorte. 86
Figura III.32 Vista lateral del resorte. 89
Figura III.33 Remoción del yeso 89
Figura III.34 Molde de yeso con disco en la parte baja 90
Figura III.35 cortar la fibra de carbono al tamaño del molde. 90
Figura III.36 Socket, vista desde arriba. 91
Figura III.37 Socket con tornillo acoplador. 91
Figura III.38 Vista Lateral de socket. 92
Figura III.39 a) Prótesis acoplada. b) Piezas de la prótesis. 93 Figura III.40 a) Activación del campo magnético. b) Aprisionamiento del pistón. c) Caída con
amortiguación de la masa. 96
Figura III.41 a) Obtención del líquido magnetoreológico. b) Amortiguador prototipo. 96 Figura III.42 Grafica de la constante de amortiguación en función de la corriente eléctrica. 97 Figura III.43 Grafica de la constante de amortiguación en función de la corriente eléctrica. 98
Figura III.44 Ciclo de la marcha con amortiguador. 99
Figura III.45Diagrama de cuerpo libre en la pisada de la marcha. 100 Figura III.47 Respuesta al sistema con constante de amortiguación de 500 Ns/m 104 Figura III.48 Respuesta al sistema con constante de amortiguación de 872 Ns/m 105 Figura IV.1 Bosquejo del relé interruptor del circuito principal. 109
Figura IV.2 Circuito del interruptor de límite. 109
Figura IV.3 Amplificador de voltaje. 110
Figura IV.4Circuitoelectrónicode control. 111
Figura IV.5 Montaje de la electrónica en la prótesis. 112
Figura IV.6 Partes del cajón para la electrónica. 112
Figura IV.7 Vista frontal, lateral, superior e interna del cajón para la electrónica. 113 Figura IV.1 a) Esfuerzo equivalente b) Tensión elástica equivalente en límite de dorsiflexión de la
prótesis. 116
IV.2 Análisis de deformación total en límite de dorsiflexión de la prótesis. 117 Figura IV.3a) Esfuerzo equivalente b) Tensión elástica equivalente en límite de flexión de la
prótesis. 118
Contenido
xi Figura IV.5 a) Esfuerzo equivalente b) Tensión elástica equivalente en posición recta de la prótesis.
Contenido
xii
Índice de Tablas
Tabla I.1Resultados del comportamiento del amortiguador magnetoreológico con 2Kg de masa. 9 Tabla I.2 Resultados de esfuerzos y deformaciones en los dedos del pie. 12
Tabla I.3Valores de parámetros del modelo neuromuscular 14
Tabla I.4 Especificaciones de la Re-Flex Rotate 16
Tabla I.5 Resumen del estado del arte 18
Tabla II.1 Propiedades de la fibra de carbono. 23
Tabla II.2 Propiedades del silicón Junta Flex de Devcon® 23
Tabla II.3 Características del Aluminio 24
Tabla II.4 Características del acero AISI 316 24
Tabla II.5 Características del Tungsteno 25
Tabla II.6 Características del Titanio 26
Tabla II.1 Estudios de Dempster y Clauser para hombre de 90 Kg. 38 Tabla II.7Estimación de las dimensiones de los eslabones 40
Tabla II.8 Peso por segmentos corporales. 41
Tabla III.1 Especificaciones del fluido Quadromatic por QuakerState 56 Tabla III.2 Características de aleaciones Ferromagnéticas 61
Tabla III.3Magnitudes presentes en el electroimán. 62
Tabla III.4 Unidades del esfuerzo. 65
Tabla III.5 Datos experimentales para fluidos magnetoreológico (aceite 80%- limadura 20%) 97 Tabla III.6 Datos experimentales para fluidos magnetoreológico (aceite 60% - limadura 40%) 98 Tabla V.1 Material utilizado en el proyecto con sus respectivos costos. 120
Contenido
xiii
Resumen.
El presente trabajo expone el diseño de una prótesis transtibial con amortiguación dinámica para un hombre de 90 kilogramos y 1.76 metros de altura, mediante los parámetros de anatomía y biomecánica del sistema del pie-pierna que obtuvieron Dempster y Clauser. A todo el sistema final de la prótesis se le aplicó una simulación de esfuerzos con un programa de cómputo.
Para el diseño de la amortiguación dinámica se utiliza el principio de los amortiguadores magnetoreológicos con 40% de limadura de hierro y 60% de aceite de transmisión automática. Para el componente que embona la prótesis con el muño (socket) se utilizó la investigación previa del estado del arte. Se eligió la fibra de carbono para su manufactura, el cual es un material flexible y de alta resistencia.
Para el análisis de esfuerzos se plantearon los casos extremos de flexión y dorsiflexión de la articulación del tobillo y se ha recurrido al programa de computo ANSYS, aplicando previamente, el sistema de diseño asistido por computadora CAD (Computer Aided Design) para el bosquejo y definición de la geometría del modelo.
Para la obtención de la constante de amortiguamiento se utilizó un prototipo del amortiguador, y el líquido magnetoreológico se sometió a crecientes cambios de campo magnético: la constante de amortiguamiento mínima del líquido es de 212 Ns/m y la máxima de 872 Ns/m, este rango de valores producen una respuesta estable del sistema.
La deformación máxima producida en la prótesis ocurre en el elemento socket.
Los costos de la prótesis son elevados ($14,500) si se compara con el salario mínimo mexicano, pero que es un 50% más barata que las del mercado ofrece con las mismas características.
Abstract.
This thesis presents the design of a trastibial prosthesis with dynamic damping for a man of 90 kilograms and 1.76 meters of high, with the parameters of anatomy and biomechanics of the system foot-leg that Dempster and Clauster obtains. All system of the prosthesis has been apply a simulation of stress with a program computer.
For the design of the dynamic damping has been use the principal of magnetoreological dampers with 40% of iron and 60% of fluid trasmition automatic for cars.
Contenido
xiv For the stress analysis were pose the extreme cases of flexion and dorsiflexion of the ankle joint and been used the ANSYS program computer, apply previously, the computer aided design for the sketch and definition of geometry of the prosthesis.
For obtaining the constant of damping has been use a prototype of the damper an d the magnetoreological fluid has been submitted to growing changes of magnetic field: the minimum constant of damping is 212 Ns/m and the maximum is 872 Ns/m, this range produce a stable response of the system.
The maximum deformation produce is in the socket.
Contenido
xv
Objetivo General.
Diseñar una prótesis transtibial que integre un amortiguador, para que reproduzca las condiciones de marcha humana, en un paciente de 90Kg y 1.76 metros de altura.
Objetivos específicos
Conocer distintos trabajos y marcas comerciales que se relacionen con este trabajo de investigación
Describir la anatomía, fisiología y biomecánica del sistema pie-pierna, para conocer su peso, centro de masa, funciones y tipo de esfuerzos que está sujeta dicha articulación.
Diseñar la prótesis respetando los parámetros obtenidos en el capítulo II y su amortiguación bajo el principio de los amortiguadores magnetoreológicos. Así como la obtención de las constantes de amortiguación según se varía el campo magnético.
Contenido
xvi
Organización de la tesis
Después de observar todos los avances y técnicas que se tienen hoy en día en el diseño de las prótesis y en particular las transtibiales, se concluye la necesidad de implementar y diseñar una prótesis para la marcha real.
Es necesario considerar para el diseño de una prótesis transtibial: el centro de masa, el largo del miembro, y la funcionalidad. Así como el mecanismo que puede imitar el estado de amortiguamiento que usa el tobillo.
Para poder alcanzar los objetivos aquí planteados, este trabajo se ha organizado de la siguiente manera:
En el Capitulo 1, Se dan a conocer proyectos y prótesis del mercado en orden cronológico para ubicar el proyecto en un plano de referencia y conocer las tecnologías que se han ido desarrollando. Estos ensayos dan ideas de la manufactura, diseño, materiales, para desarrollar la prótesis.
En el Capítulo 2, se dan a conocer las causas de una amputación y la anatomía de la parte baja de la pierna, para entender un poco más al paciente.
En el Capítulo 3, se muestra el proceso que se llevó a cabo para llegar al diseño del amortiguador. En el Capítulo 4, se da a conocer el circuito que controla al fluido magnetoreológico y su montaje en la prótesis.
En el Capítulo 5, se muestran los resultados obtenidos del análisis de esfuerzos y las conclusiones a las que se llegó.
Contenido
xvii
Glosario
Aceroaustenítico: Es acero cromo – níquel, más inoxidable y resistente a la corrosión atmosférica y a ciertos ácidos que los martensíticos o los ferríticos, no puede ser templado y revenido ni precocido de forma ordinaria.
Arteriosclerosis: Es el endurecimiento de arterias de mediano y gran calibre. Astrágalo: Uno de los huesos del tarso, articulado con la tibia y el peroné.
Desbridar: Eliminación de suciedad, cuerpos extraños, tejidos dañados y restos celulares de una herida o una quemadura, para evitar una infección o promover su cicatrización. Diabetes mellitus: Es un conjunto de trastornos metabólicos, que afecta a diferentes
órganos y tejidos, dura toda la vida y se caracteriza por un aumento de los niveles de glucosa en la sangre
Ergonomía: Conjunto de técnicas que buscan la mejor adaptación de la persona a su trabajo, por eliminación de de sus aspectos más molestos o perjudiciales.
Eversión: Rotación externa del pie con elevación del borde externo del pie. Inversión: Rotación interna del pie con elevación del borde interno del pie.
Maléolos: son cada una de las partes que sobresalen de la tibia y del peroné en el inicio del pie.
Mortaja maleolar: Hueco que describe el maléolo, donde embona la articulación tibio-peronea.
Mortaja tibioperonea: Cavidad donde encajan la tibia y el peroné durante la marcha.
Poplíteo: Es un músculo de la pierna que se encuentra en la parte posterior de la rodilla, debajo de los gemelos.
Retropié: Parte posterior del pie, formada por el astrágalo y el calcáneo.
Sindesmosis: Es una articulación fibrosa que une huesos separados por una amplia distancia con una lámina de tejido fibroso, ya sea un ligamento o una membrana fibrosa. Tróclea: Articulación en forma de polea que permite que un hueso adyacente pueda girar
en el mismo plano.
Contenido
xviii
Justificación.
La amputación es una incapacidad que afecta a cualquier persona. Al suceder esto, con la ayuda de una parte del cuerpo, muñón, como elemento protésico y con un tratamiento de protetización, se intenta recuperar las facultades perdidas. El ser humano se acostumbra tanto al ambiente que lo rodea, que si se altera, inmediatamente se siente inseguro, incomodo y hace lo necesario por restablecerlo.
Todos los seres vivientes tienen la característica de la adaptabilidad, la cual está en función del tamaño de la perturbación, es decir: si se amputa un pequeño miembro, el humano, si no usa prótesis, tiene la capacidad de vivir perfectamente así después de un razonable tiempo; por otro lado, si se amputa un miembro grande, se tardará más en acostumbrar, si es que no usa prótesis.
Al parecer, el cambio brusco en la fisionomía del cuerpo, es la que crea la necesidad de una prótesis, porque inmediatamente el humano quiere restablecer el orden con el que había vivido hasta ese momento.
Esta necesidad lleva a crear cada día prótesis cada vez más perfectas, es decir, que se ajusten lo mejor posible a la anotomía del cuerpo: con sus resistencias, extensiones, flexiones, centros de masa, utilidades, color y textura.
La parte baja de la pierna, tiene una gran responsabilidad en el amortiguamiento del cuerpo cuando está en su ciclo de marcha normal, corre o brinca. Esta propiedad se logra en gran parte a la dinámica del pie, que si bien los ligamentos y músculos de la tibia, peroné y astrágalo son fundamentales, el pie siempre se posiciona para absorber y propulsar las marchas. Una prótesis con articulaciones de los dedos del pie sería muy difícil de crear y muy cara, pero con un arreglo masa-resorte-amortiguador, imitará fielmente el caminado, siempre y cuando se realice una correcta selección del elemento que amortiguará este dispositivo.
Contenido
xix
Hipótesis
1 Se dan a conocer algunos trabajos en cuanto al diseño de prótesis transtibiales, para entender plena-mente el funcionamiento, y la evolución de estos dispositivos protésicos.
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
11
I. Generalidades
La prótesis es un aparato externo usado para reemplazar total o parcialmente un segmento de un miembro, ausente o deficiente. Se incluye cualquier aparato que tenga una parte en el interior del cuerpo humano, por necesidades estructurales o funcionales [5].
Hay dos grandes tipos:
Endoprótesis se implantan mediante cirugía, se anclan al hueso y sirven para sustituir una articulación dañada por artrosis o traumatismo.
Exoprótesis son dispositivos que sustituyen total o parcialmente un miembro del aparato músculo-esquelético por amputación; cuya colocación o remoción no requiere medios quirúrgicos. Y también existen dos ramas.
Endo-esqueléticas: prótesis constituida por componentes que figuran el hueso y articulaciones de la extremidad amputada, donde el eje puede tener una cobertura estética moldeada y acabada de forma que se parezca a la extremidad natural.
Exo-esqueléticas: prótesis fabricada de una cubierta exterior dura y hueca, diseñada para soportar peso. Estas son las que siguen el contorno del segmento amputado.
Las prótesis han sido artefactos que el humano ha utilizado a lo largo su vida, y existen varios tipos de estas. Pero es obvio que si sustituirás una parte de tu cuerpo, el paciente siempre buscará la perfección, y en este campo, la ciencia y la tecnología ya está muy desarrollada. Las prótesis han ayudado a un sinfín de personas de todas las edades y sexos, las cuales practican diferentes actividades: desde la elaboración de alguna obra arte, hasta la práctica de algún complicado deporte (Figura I.1).
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
22 La diversidad de los productos siempre radica en el aumento de consumidores, y lo mismo pasa en las prótesis, y en particular las que sustituyen el miembro inferior. Según el Instituto Mexicano del
Seguro Social (IMSS) [27], 70% de las amputaciones no traumáticas de pie son consecuencia de
complicaciones infecciosas por diabetes mellitus. Las cuales son originadas por falta de control médico, ya que es crónico-degenerativa. Un 5% de amputaciones son derivadas de accidentes automovilísticos, de trabajo o quemaduras de tercer grado. Mientras que la Secretaría de Salud y
Asistenca (SSA), informa que en 2007 se amputaron 75 mil piernas en México [27].
I.1 Antecedentes
La utilización de prótesis está relacionada con el número de discapacitados alrededor del mundo y estas se han ido mostrando desde las prótesis de madera del siglo XVI hasta las prótesis de varios grados de libertad y variedad de aplicaciones tecnológicas [7].
Antes de la segunda guerra mundial, los médicos se valían de los conocimientos del momento, que eran sencillos. Además de no contar con personal a su cargo como un carpintero, un herrero, que les facilitara la prótesis.
Todo empezó con la segunda guerra mundial y la necesidad de adquirir bioingenieros, ya que esto fue un paso natural: los físicos, químicos y matemáticos había sido acaparados por la milicia, y los únicos científicos disponibles eran biólogos que fueron recaudados para la elaboración de radares, donde utilizaron por primera vez la electrónica. Con el tiempo se fundó la federación internacional de electrónica médica, y hasta 1965 fue adoptado el nombre de Federación Internacional de Ingeniería Médica y Biológica [7].
I.2 Estado del arte.
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
33 El material principal para la fabricación, es un miembro inferior expuesto transversalmente por arriba de 6cm del maléolo medial.
La articulación va montada en una fibra reforzada elástica, después de un ciclo de cinco mil, diez mil y 3 millones, la estructura funcional no sufrió modificación alguna. Un bosquejo de la prótesis se muestra en la Figura I.2
Figura I.2 Bosquejo de prótesis endoesquelética.
En la figura se observa que la parte A es la unión de madera, la parte B es el cordón de regreso, la parte C es la articulación del endoesqueleto, la parte D el cojín de amortiguamiento, la parte E es el cuerpo esponjoso plantar, la parte F es la goma micro celular, y la parte G es la concha de empeine [17].
La marca Otto Bock sacó al mercado en 1999 la C-Leg®, la cual usa sensores y microprocesadores que adaptan el sistema dinámicamente a la velocidad de caminar en tiempo real. Al mismo tiempo, ofrece una seguridad real durante la fase de apoyo.
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
44 articulación reconoce continuamente en qué fase de caminar se encuentra el usuario en ese momento.
La fase de impulsión está controlada hidráulicamente, la amortiguación en la fase de apoyo estabiliza la articulación después del impacto de talón y mantiene esa resistencia hasta que cambia a la fase de impulsión.
En la Figura II. 3 siguiente se muestra físicamente la prótesis C-leg®.[31]
Figura I.3 Prótesis C-Leg®
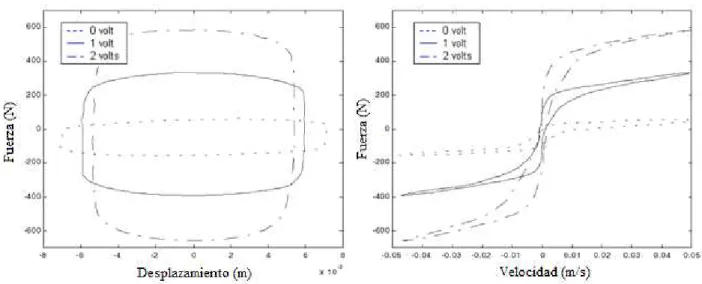
W.H. Liao y C.Y. Lay en el año 2002 implementaron un sistema pasivo y versátil de control activo sin utilizar grandes cantidades de energía. Encontraron a los fluidos magnetoreológicos adaptables para un sistema efectivo de control para vibraciones. Además, exponen las diferencias entre un amortiguador viscoso y uno magnetoreológico para establecer su gran potencial, además de que pocos autores hablan al respecto, asimismo, muestran un modelo del amortiguador. El cual se rige por el modelo de Bouc-Wen y con sus 14 parámetros describe al fluido.
Para la experimentación, se utilizó el sistema mostrado en la figura I.4.
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
55 Las gráficas que se obtuvieron a 0, 1 y 2 Volts para desplazamiento y velocidad son las que se observan en la figura I.5.
Figura I.5 Gráficas de simulación en el programa de cómputo Simulink®.
Se analizó la energía disipada con respecto al voltaje introducido, y respecto al desplazamiento, no se observó mucha variación. Los resultados de los autores muestran que un amortiguador magnetoreológico puede lograr vibraciones efectivas de suspensión sin sacrificar el peor aislamiento de grandes frecuencias [17].
Ascencio en 2007, desarrolló el diseño y modelo de un pie, con control electrónico a lazo abierto y un sistema de amortiguación con alambres de Nitinol, buscando una mejor adaptabilidad para el usuario [2].
Los materiales utilizados son resina plástica de poliéster y fibra de carbono reforzada, aluminio y alambres de Nitinol.
Para el análisis de la marcha, se utilizó una cámara y mediante un programa de cómputo se simuló el movimiento de las piernas para obtener los centros de masa en cada ciclo.
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
66 Figura I.6Bocetos de prótesis con alambres de Nitinol.
Después de algunos bocetos solo se consideró la articulación plantar como único punto de amortiguación, y se redujo la apertura plantar
Para el alambre muscular de Nitinol, se le aplicaron varias corrientes eléctricas, para poder medir la temperatura crítica, y ver cuánto es el tiempo que demora en llegar a su máxima compresión.
El sistema de amortiguación consiste en dos parte, la estática y la dinámica: la estática es resuelta por el resorte, pero la dinámica necesita un circuito de control que ayude al resorte a hacer una fuerza con el fin de minimizar el impacto del pie con el suelo, y esto se logra manteniendo el resorte a una temperatura de 63 grados Celsius. El prototipo funcional y final es mostrado en la figura I.7.
Figura I.7 Prototipo final de prótesis con alambres de Nitinol.
Ricardo Enríquez en 2007 encontró que el principal problema son las ondas de choque que se efectúan en el ciclo de marcha y propone atenuarlas en la fase estática y de balanceo con sus valores adecuados [13].
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
77 permite que cuando el eslabón de entrada gire en sentido horario, acorde a la distancia que existe entre el quinto eslabón y el eslabón tibial, dirigiendo el embolo hacia adentro del pistón, y esto se puede representar como se muestra en la figura I.8.
Figura I.8 Sistema de 5 eslabones para prótesis.
La rodilla está constituida por un mecanismo policéntrico, que permite la rotación fielmente a la anatomía humana.
Para el fluido magenetoreológico, se preparó con Carbonilo de Hierro, que contiene una alta saturación magnética, las partículas poseen una geometría esférica. El fluido es aceite de silicón con una densidad ρ=0.98.
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
88 Figura 1.9 Curva de flujo del fluido magnetoreológico para diferentes intensidades de corriente.
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
99 García en 2007 expone que la mayoría de los miembros protésicos no cuentan con un sistema de amortiguación que logre reducir la carga física de la persona. Los fabricantes solo tienen amortiguación estática y dejan a un lado la complejidad del cuerpo humano.
El trabajo se divide en varias etapas: investigar el comportamiento de la rodilla, caracterizar el comportamiento de los fluidos magnetoreológicos, simular el comportamiento de la rodilla a través de un programa de cómputo, comparar el análisis estructural de la rodilla con los fluidos magnetoreológicos, diseñar un sistema de amortiguación basado en los márgenes de aplicación del líquido, simular el comportamiento del amortiguador a través de un programa de cómputo diseñar el sistema de control para el amortiguador, corregir el diseño de ser que falle.
El análisis de fuerzas en estado dinámico es resuelto por medio del comportamiento de un péndulo invertido, y las variables son ajustadas a los valores del comportamiento real de la pierna y la linealización para ángulos no mayores a 15°; la ecuación queda en términos de la masa del sistema, de la amortiguación, de la fuerza de empuje y de la longitud del péndulo, es este caso la tibia. Las fuerzas obtenidas son sometidas al amortiguador como entradas o salidas; por las formulas de fuerzas internas de un amortiguador y la descripción de un fluido magnetoreológico. La ecuación queda en función de la corriente eléctrica, la posición del centro de masa y el ángulo de rotación de la rodilla.
Los resultados que obtienen son el experimento de dos jeringas, las cuales fueron sometidas con un campo eléctrico. Se aplicaron diferentes fuerzas de entrada, junto con variación en la corriente, y se obtuvieron los resultados mostrados en la tabla I.1siguiente.
Tabla I.1Resultados del comportamiento del amortiguador magnetoreológico con 2Kg de masa. Peso (Kg) Distancia (m) Corriente (A) Tiempo (s) Campo
magnético (mT)
Velocidad (m/s)
2 0.045 0 5.49 0 0.0081967
2 0.045 0.2 6.7 12.2 0.0067164
2 0.045 0.4 8.51 21.2 0.0052878
2 0.045 0.6 15.27 29.6 0.0029469
2 0.045 0.8 42.5 38.8 0.0010588
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
1010 Se observa que la corriente es aumentada linealmente, pero el tiempo de reacción no conserva la misma proporcionalidad. Con la corriente adecuada en el momento preciso, el amortiguador responderá como se requiera.
Las simulaciones correspondientes se dan con la prótesis de diseño mostrada en la Figura I.11.
Figura I.11 Diseño de prótesis transfemoral
Este trabajo muestra una simulación muy cercana del amortiguador con respecto a la marcha humana, la cual es de implementación factible. Por otro lado, el sistema de control es de bajo esfuerzo, por lo que lograría superar los problemas fisiológicos, estéticos y psicológicos.
El control PID que se proporcionó al controlador, ajusta mejor el caminado, ya que aumenta la respuesta de salida, para el momento del impacto [13].
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
1111 Figura I.12 Prótesis de pie dinámico
Este trabajo cuenta con acumulador de energía representando para un amputado, una prótesis con amortiguador, lo cual disminuye el desgaste de cadera y/o alteraciones en la cabeza del fémur. El pié dinámico o de acumulación de energía cumple dos funciones:
a) La función de almacenamiento y retorno de energía, ayudando a la marcha impulsando a la prótesis para que no se tenga que levantarla.
b) La absorción vertical, que permite una marcha más natural y protege el muñón y el resto de articulaciones del lado amputado del golpe excesivo que se produce al apoyar el peso del cuerpo sobre la prótesis.
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
1212 Figura I.13 Componentes del pie, por el programa de computo ANSYS
El método consistió en analizar los huesos de cada dedo, con una carga total de 746N en la parte superior de los huesos metatarsos; el 50% de la carga es para el metatarso pulgar y 12.5% para los metatarsos restantes.
Los resultados de los esfuerzos y deformaciones obtenidas para cada uno de los dedos son mostrados en la tabla I.2.
Tabla I.2 Resultados de esfuerzos y deformaciones en los dedos del pie. Material Desp. En Z (mm) Esf. Von-Mises
(MPa)
Desp. Equiv.
Dedo pulgar Isotrópico -0.001816 1.151 0.001847
Ortotrópico -0.001187 1.201 0.001216
Dedo índice Isotrópico -0.034737 15.839 0.034748
Ortotrópico -0.024508 16.467 0.024628
Dedo medio Isotrópico -.006801 15.678 0.007107
Ortotrópico -0.004384 16.562 0.004405
Dedo anular Isotrópico -0.29586 17.288 0.296978
Ortotrópico -0.0206727 18.45 0.207623
Dedo meñique
Isotrópico -0.687322 33.372 0.691476
Ortotrópico -0.521773 32.355 0.52493
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
1313 Valencia Anaí en el 2009 plantea el problema en el aumento del número de amputaciones transtibiales, y entre este aumento, el 1.2% son deportistas que practican el atletismo. La solución actual de este problema es resuelto por prótesis de fibra de carbono o titanio, las cuales son muy caras para la mayoría de los amputados. Este trabajo propone una prótesis de aluminio, que abate los costos de producción, sin tener que sacrificar efectividad, Como se trata del diseño de toda una prótesis, se hace el análisis biomecánico, del miembro inferior y también del ciclo de la marcha, valorando que una de las principales preocupaciones son los atletas de alto rendimiento.
Después de tener todo el análisis de la biomecánica, y un prototipo de prótesis, se simuló con el programa de cómputo ABAQUS 6.7, el adelgazamiento del metal, el cual contribuye en el ahorro de los tiempos de fabricación [27]. Asimismo este trabajo muestra la fabricación del socket, el cual muestra configuraciones de adaptabilidad en cada paciente. El diseño terminado se observa en la Figura I.14.
Figura I.14 Prótesis Flex-Footterminada.
Michael F. Eilenberg2010 [10] propone como problema principal, las prótesis con movimiento elástico pasivo, las cuales son ineficientes, ya que se adaptan bien a un caminado lento, pero a mayores velocidades, el usuario necesita agregar una energía extra, además que los pasos son más cortos. Otro problema es que los pasos son asimétricos. Además a menor escala, las prótesis que cuentan con motores, que aunque igualan el torque, y no necesitas una fuerza extra al caminado, su adaptación no es inherente.
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
1414 tobillo está provista de dos actuadores virtuales. Para el torque de la dorso flexión y la impedancia, un sistema virtual rotatorio de resorte-amortiguador lo provee. Figura I.15.
Figura I.15 Prótesis incluida en el análisis.
El único sensor que utiliza esta prótesis, es para medir el torque en la articulación del tobillo, un microcontrolador PIC33FJ128MC706, una interfase inalámbrica y una batería.
El conjunto de control, se divide en 3 etapas:
El control de nivel superior, que es la que se basa en el sistema neuromuscular, y admite el censo de torque.
El modelo de dorsoflexión, que es el actuador del mismo, al cual se implementa el sistema virtual rotatorio con un punto de consigna de Angulo de posición, junto con la velocidad angular iguales a cero.
El modelo de flexión plantar, tiene un tendón virtual, el cual no es lineal y se debe de linealizar en cada momento.
Los parámetros del modelo neuromuscular. Son expuestos en la Tabla I.3
Tabla I.3Valores de parámetros del modelo neuromuscular Parametro
(unidades)
Valor Parametro
(unidades)
Valor
) (m
Iopt 0.04 w 0.56
) (m
Ibaja 0.26 c Ln(0.05)
) / (
max I s
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
1515
ref
0.04 K 5
eA
Pr 0.01 0.5
) (s
T 0.01 rfoot(m) 0.05
eSTIM
Pr 0.01 DelayRF(s) 0.02
Con el sistema de control, básicamente se manipula el motor, para imitar el torque de una persona no amputada. Las gráficas de diferentes momentos en el tobillo muestran que el motor sigue las condiciones neuromusculares. En la Figura I.16 se muestran los resultados.
Figura I.16 Gráficas de momentos del tobillo.
La marca ÖSSUR®en 2010 sacó a la venta la prótesis llamada Re-Flex Rotate con EVO®, el cual es un dispositivo robusto de alto rendimiento que permite a sus usuarios realizar actividades cotidianas, mediante la combinación de un amortiguador y un retorno de energía dinámico. Cuenta conun muelle de titanio integrado que proporciona la absorción de impactos y reduce la tensión en todas las partes del cuerpo, al mismo tiempo que mejora el control.
Algunas ventajas que tiene el dispositivo son:
Absorción de choque vertical y retorno de energía dinámica la bobina de titanio ofrece más de 14 mm de recorrido vertical diseñado para absorber las fuerzas verticales de choque y reducir la presión sobre el muñón.
Absorción de los impactos de rotación diseñada para amortiguar las fuerzas de fricción y la presión sobre el miembro residual.
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
1616 Figura I.17 Prótesis de pie dinámico
En la tabla I.4 se muestran las especificaciones de la prótesis.
Tabla I.4 Especificaciones de la Re-Flex Rotate
Máximo peso soportado 147 Kg
Peso de la prótesis (tamaño 27) 1.136 Kg
La marca Össur fabricó la RheoKnee® en 2010; una prótesis transfemoral con el principio de los fluidos magnetoreológico [30].Engloba una inteligencia artificial, que toma en cuenta la forma de caminar del individuo. Sustituye las funciones de la rodilla humana con un tiempo de reacción cercano al de los reflejos espinales normales, registrando datos de velocidad, carga y posición 1.000 veces por segundo. Se adapta a cualquier cambio de velocidad, dirección y terreno, proporcionando, la respuesta es automática para cada situación, gracias a palas rotatorias para variar la resistencia de la rodilla con cada paso.
El dispositivo se muestra en Figura I.18.
Figura I.18Prótesis RHEO KNEE®
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
1717 La marca Otto Bock en 2010 sacó al mercado el pie protésico Dynamic Motion® (Figura I.19).Se puede mover en distintas direcciones para que pueda andar con facilidad y moverse dándole un giro a los dedos. Este dispositivo se adapta a superficies irregulares sin problema para reducir los obstáculos normales de un paseo por la ciudad o una excursión por el campo; asimismo devuelve la energía almacenada. Lo que permite una transición dinámica desde la fase de apoyo (el punto en el que el pie está sobre el suelo, hasta la fase de impulsión), esto reduce la tensión en el pie sano y el riesgo de complicaciones debido a la forma de andar que no es natural.
Además es apropiado para usuarios de prótesis con amputaciones transtibiales, desarticulación de rodilla, amputación transfemoral o desarticulación de cadera con un nivel de actividad de bajo a moderado, que requieren un pie con un impacto cómodo de talón, giro fisiológico y buen retorno de energía. [31]
Figura I.19 El DynamicMotion
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
1818 Figura I.2201E56 Axtion®
La información recopilada en el estado del arte sirve para ver que tan cerca esta de la realidad el proyecto y para generar varias ideas de todo lo que contiene una prótesis; desde teoría, localización de puntos críticos y resultados a los que hay que llegar.
En la Tabla I.5 se muestra un resumen de los métodos vistos en el estado del arte.
Tabla I.5 Resumen del estado del arte
Año Autor Materiales Control
1991 S. G. Kabra Articulación inferior de cadáver
Goma micro celular
Movimiento natural de la marcha
1999 Otto Bock No se especifica Con sensores y
microprocesadores adaptan el sistema a la velocidad de caminar en
tiempo real 2002 W.H. Liao y C.Y.
Lay
Amortiguador magnetoreológico
Variación de voltaje
2007 Asencio Resina plástica de poliéster Fibra de carbono reforzada Alambres de Nitinol.
Amortiguación estática y Dinámica con un resorte de Nitinol. Variación de temperatura por medio
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
1919 2007 Ricardo Enríquez Amortiguador
Magnetoreológico unido a un mecanismo de 5 barras
Variación de corriente eléctrica
2007 García Amortiguador
Magnetoreológico
Control PID, que varía con más eficiencia los cambios en la
corriente eléctrica 2007 La asociación
de Amputados en España
Fibra de carbono Almacenamiento y retorno de energía en el ciclo
la marcha 2008 Frías Chimal y
Camacho Alma
Programa de computo ANSYS®
Medir las deformaciones y esfuerzos en cada hueso del pie.
2009 Valencia Anaí Prótesis de aluminio Socket de fibra de carbono
Amortiguación natural del diseño De la prótesis de aluminio.
2010 Michael F. Eilenberg
Sensor de torque Actuador
MicrocontroladorPIC y una interfase inalámbrica. El actuador
manipula dependiendo el ángulo de flexión y el torque.
2010 ÖSSUR®
Re-Flex Rotate®
Amortiguador Muelle de titanio
Absorción de energía, y retorno de la misma
en fuerzas verticales de choque.
2010 ÖSSUR®
RheoKnee®
Palas rotatorias para variar la resistencia de la rodilla. Amortiguador
Magnetoreológico
Sensores de carga, velocidad y posición para variar la resistencia de
amortiguación, gracias a un microcontrolador de alta reacción.
2010 Otto Bock® DynamicMotion®
No se especifica Retorno de energía almacenada y flexibilidad del pie.
2011 Otto Bock® 1E56 Axion®
Elastómero Fibra de carbono
Capítulo I Estado del arte
DISEÑO DE UNA PRÓTESIS DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA
2020
I.4 Planteamiento del problema.
Las empresas fabricantes de prótesis, ofertan sus productos con costos elevados, además los modelos en toda una línea no se adaptan al 100% a los requerimientos de los pacientes; como puede ser la compensación del peso del miembro amputado, localización del centro de masa, amortiguación según cada persona.
Este trabajo de investigación pretende resolver los requerimientos del paciente diseñando prótesis que contemplan todos los parámetros antes mencionados.
Capítulo II
21 Se muestra aspectos teóricos, que permiten establecer el modelado, así como la configuración del dispositivo para la adquisición de datos que ayudan a evaluar las constantes de amortiguamiento necesarias en el diseño de la prótesis transtibial.
G
ENERALIDADES
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 22
II. Introducción
Es de suma importancia conocer las leyes que rigen la física del cuerpo, y en especial es necesario conocer la anatomía y la biomecánica del tobillo para abordar este tema.
Como cualquier cuerpo rígido, el tobillo se atiene a las leyes de Newton, y por su anatomía se puede describir por medio de la ley de Hooke y las ecuaciones que describen a los amortiguadores.
La marcha posee varias etapas y estados de esfuerzos, que se deben modelar por separado para obtener las constantes de elasticidad y amortiguamiento.
Los pasos a seguir para el diseño son: investigar el comportamiento del tobillo, caracterizar el comportamiento de los fluidos magnetoreológicos, comparar el análisis estructural del tobillo con los fluidos magnetoreológicos, diseñar un sistema de amortiguación basado en los márgenes de aplicación del líquido, simular el comportamiento del amortiguador a través de un programa de cómputo, diseñar el sistema de control para el amortiguador, corregir el diseño de ser que falle. El estado del arte sirvió para ver algunos materiales con los que realizan prótesis; la divide en varias partes, las más importantes son:
Pie
Adaptador
Cuerpo de la prótesis Socket
Para el pie hay que utilizar un material que almacene energíay que sea flexible, como puede ser la fibra de carbono, el silicón o elastómero.
Para el adaptador debe de ser un metal, ya que debe de ser resistente y nunca debe de fallar, se consideró el aluminio y el acero.
El cuerpo de la prótesis (el que funge de tibia) es el que absorbe gran parte del impacto, por eso se diseñará en forma de amortiguador y debe de ser un material inoxidable, como puede ser el Acero 316, Tungsteno, o Titanio.
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 23
II.1 Materiales
La fibra de carbono se incluye en el grupo de los materiales compuestos, es decir, aquellos que están hechos a partir de la unión de dos o más componentes, que dan lugar a uno nuevo con propiedades y cualidades superiores, que no son alcanzables por cada uno de los componentes de manera independiente.
En el caso particular de la fibra de carbono, básicamente se combina un tejido de hilos de carbono (refuerzo), el cual aporta flexibilidad y resistencia, con una resina termoestable (matriz), comúnmente de tipo epoxi, que se solidifica gracias a un agente endurecedor y actúa uniendo las fibras, protegiéndolas y transfiriendo la carga por todo el material; por su parte el agente de curado ayuda a convertir la resina en un plástico duro [37]. En la tabla II.1 se muestran sus propiedades.
Tabla II.1 Propiedades de la fibra de carbono. Propiedad Fibra Contenido en carbón (%) 95
Diámetro(µm) 6-8 Densidad (gtm) 1.8 Resistencia a la tracción (mpa) 3800
Alargamiento a la rotura 1.6 Resistencia eléctrica (µ_cm) 1650 Conductividad térmica (w/mk) 20
El Silicón puede usarse para cumplir una variedad de necesidades en formación de juntas, forma un hule, de silicón al curar que se adhiere al vidrio, aluminio, madera, huesos de cristal, porcelana, cerámica, huele. En la tabla II.2 se muestran las propiedades del silicón fabricado por Devcon, llamado Junta Flex.
Tabla II.2 Propiedades del silicón Junta Flex de Devcon® Propiedades físicas
Asentimiento o hundimiento NIL Tiempo libre de pegosidad a 25° 50% Hr 25 min
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 24
Dureza shore A 23
Movimiento dinámico de la junta 25%
Intemperie Sin cambios
Los Elastómeros son aquellos polímeros que muestran un comportamiento elástico. Cada uno de los monómeros que se unen entre sí para formar el polímero está normalmente compuesto de carbono, hidrógeno, oxígeno y/o silicio. A temperatura ambiente las gomas son relativamente blandas y deformables. Se usan principalmente para cierres herméticos, adhesivos y partes flexibles
El Aluminio es un metal no ferromagnético. Es el tercer elemento más común encontrado en la corteza terrestre. Los compuestos de aluminio forman el 8% de la corteza de la tierra y se encuentran presentes en la mayoría de las rocas, de la vegetación y de los animales. En la tabla II.3 se muestran sus propiedades físicas
Tabla II.3 Características del Aluminio Aluminio
Modulo de elasticidad Unidades
73 GPa=KN/mm²
Densidad en masa Unidades
2800 Kg/m³
Esfuerzo de fluencia Unidades
310 MPa
Razón de Poisson Unidades
0.33 adimensional
El Acero AISI 316son aleaciones de hierro con un mínimo de un 10,5% de cromo. La aleación 316 es un acero inoxidable austenítico de uso general con una estructura cúbica de caras centradas. Es no magnético en estado recocido y sólo puede endurecerse en frío. Se añade molibdeno para aumentar su resistencia a la corrosión. El bajo contenido en carbono de la aleación 316 otorga una mejor resistencia a la corrosión en estructuras soldadas [33]. Cuenta con la siguiente propiedad mecánica:
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 25
Acero AISI 316
Modulo de elasticidad Unidades
190-210 GPa=KN/mm²
Densidad en masa Unidades
7850 Kg/m³
Esfuerzo de fluencia Unidades
250 MPa
Razón de Poisson Unidades
0.27-0.3 adimensional
El Tungsteno es un elemento químico de símbolo W, de número atómico 74 y peso atómico 183.85. Este metal tiene una estructura cúbica centrada en el cuerpo y brillo metálico gris plateado. Su punto de fusión es de 3410ºC. El metal exhibe una baja presión de vapor, alta densidad y gran fuerza a temperaturas elevadas en ausencia de aire, y es extremadamente duro. [35] En la TablaII.5 Se muestran las características del metal.
Tabla II.5 Características del Tungsteno Tungsteno
Modulo de elasticidad Unidades
340-380 GPa=KN/mm²
Densidad en masa Unidades
1900 Kg/m³
Esfuerzo de fluencia Unidades
4000 MPa
El Titanio es uno de los metales de transición, también llamados elementos de transición es el grupo al que pertenece el titanio. Las propiedades del titanio son su elevada dureza, el tener puntos de ebullición y fusión elevados y ser buenos conductores de la electricidad y el calor.
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 26
Tabla II.6 Características del Titanio Titanio
Modulo de elasticidad Unidades
100-120 GPa=KN/mm²
Densidad en masa Unidades
4500 Kg/m³
Esfuerzo de fluencia Unidades
1000 MPa
II.2Anatomía del tobillo
La parte inferior de la pierna debe de adaptarse a circunstancias de toda índole para adaptar el equilibro total del cuerpo en cualquier terrero, así como amortiguar las fuerzas durante la marcha. La energía cinética es muy variable dependiendo de la velocidad que se esté ejerciendo.
La articulación del tobillo se conforma de la tróclea astragalina y por la mortaja tibioperonea. Consta de un solo grado de libertad y es indispensable para la marcha [1].
Con ayuda de la rotación axial de la rodilla, adquiere las mismas funciones que una articulación de tres grados de libertad; para adaptar la planta del pie a cualquier terreno.
II.2.1 Máximo desplazamiento.
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 27
Figura II.1 Impacto en el brinco de una persona.
Con ayuda de el programa de computo AUTOCAD se determinó la contracción, con respecto a un punto situado en la tibia. Los resultados son: que se llega a contraer hasta 4cm.
II.2.2 Planos anatómicos
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 28
Figura II.2 Planos anatómicos
Vista anteroexterna del tobillo y pie se muestra en la Figura II.3 y la vista anterointerna del tobillo y pie se muestra en la figura II.4.
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 29
Figura II.4 Vista anterointerna del tobillo y pie
II.3 Articulación del pie
Los ejes principales de este complejo articular se interrumpen en el retropié, este punto se observa en la figura II.5. Cuando el pie está en posición de referencia, estos tres ejes son perpendiculares entre sí; en este esquema la extensión del tobillo modifica la orientación del eje Z [1].
Figura II.5 Ejes del complejo articular del pie
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 30
El eje Z es horizontal y también pertenece al eje sagital. Y da origen a los movimientos de pronación y supinación [1].
El pie consta de diferentes articulaciones que implican a los huesos del tarso, metatarsianos y falanges (figura II.6). La inversión y eversión del pie son los principales movimientos que implican a estas articulaciones [27].
Figura II.6. Articulaciones del pie
La inversión aumenta por flexión de los dedos, y la eversión por su extensión. Todos los huesos del pie proximales a las articulaciones metatarsofalángicas están unidos por ligamentos dorsales y plantares. Los huesos de las articulaciones metatarsofalángicas e interfalángicas están unidos por los ligamentos colaterales mediales y laterales [27].
II.3.1 Articulación del Tobillo
La articulación del tobillo es una bisagra sinovial (se mueve en el plano sagital). Se localiza entre los extremos distales de la tibia y el peroné y la parte superior del astrágalo.
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 31
Figura II.7 Radiografía de la articulación del tobillo
Los maléolos sostienen con fuerza al astrágalo mientras éste se desliza durante los movimientos de la articulación. El agarre de los maléolos sobre la tróclea es más fuerte durante la dorsoflexión del pie porque este movimiento fuerza la parte más ancha y anterior en dirección posterior entre los maléolos, separando ligeramente la tibia y el peroné. Esto es limitado por el ligamento tibioperoneo interóseo así como los ligamentos tibioperoneos anterior y posterior que unen la tibia y el peroné. El ligamento tibioperoneo posterior, se puede acceder por palpación, tal como se muestra en la figura II.8.
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 32
II.4 Tendón rotuliano
También llamado tendón patelar o ligamento rotuliano, es la continuación del tendón del cuádriceps femoral por debajo de la rótula. Se inserta por un lado en la rótula y por otro en la tibia, concretamente en la tuberosidad tibial, por lo tanto tiene la particularidad de que une dos estructuras óseas. Es un cordón fibroso de 6 mm de espesor, 30 mm de ancho y 43 mm de largo.
El tendón rotuliano junto con el tendón del cuádriceps participan en el movimiento de la rodilla y hacen posible la extensión de la pierna cuando se contrae el músculo cuádriceps [11]. En la figura II.9 se muestra su ubicación.
Figura II.9 Tendón rotuliano.
II.5Amputaciones.
Algunas de las causas por la que se sufre una amputación de miembro inferior, además de las bélicas (guerras, terrorismo, secuestro, atropello) se mencionan a continuación.
II.5.1 Enfermedad vascular periférica
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 33
porque los tejidos cicatrizan mal y son más susceptibles a la infección. Se ha demostrado de forma repetida que tras la amputación a través de la extremidad inferior por una enfermedad periférica, con o sin Diabetes Mellitus, el muñón suele cicatrizar incluso cuando el nivel de amputación es inferior a la rodilla; pero se debe controlar la infección con cuidado antes de la cirugía [22].
II.5.2 Lesiones y fracturas.
La segunda indicación más frecuente de la amputación es la presencia de una lesión de diferentes tipos. Una lesión aguda es una indicación cuando el aporte de sangre está destruido de forma irreparable [22].
En los casos donde la extensión del daño no puede determinarse hasta pasados algunos días, suele ser aconsejable desbridar primero y retrasar la amputación hasta que la lesión pueda evaluarse de forma precisa.
Se indican amputaciones abiertas tras quemaduras térmicas, o por congelación. La amputación por quemadura eléctrica requiere resecar los músculos o grupos musculares necróticos y conservar la piel y músculo que parezcan viables con el objetivo de construir un muñón de amputación de mayor longitud.
Se dan varias fracturas de pierna, que si bien, son tratadas a tiempo y de buena guisa, no habrá problema alguno de amputación, pero siempre puede existir el riesgo, aquí se mencionan algunas:
Fractura del fémur distal, que afecta la metafisi distal y la superficie articular de ese hueso.
La clasificación es: tipo I extra-articulares, tipo II intra-articulares y tipo III cóndilo simple.
Fractura fémur proximal y de la pelvis
Rotura ligamentosa de la rodilla
Lesión de la arteria poplítea
Lesión de los nervios peroneo y tibial
Fractura de rotula
Lesión del tendón del cuádriceps y del ligamento rotuliano
Fractura de cuerpo tibial o peronal
Fracturas indirectas del tobillo: estas se clasifican de acuerdo con la posición del pie en el momento de la lesión y a la dirección de la fuerza lesiva, por lo tanto se emplean 2 palabras: una para la posición (supinación-pronación) y la otra la dirección (aducción-abducción) o rotación externa-interna.
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 34
Figura II.10 Supinación-rotación externa.
Pronación-abducción en la sidesmosis. Esta fractura se muestra en la Figura II.11.
Figura II.11 Pronación-abducción en la sidesmosis. Pronación-abducción por encima de la sidesmosis.
Pronación-rotación externa. Esta fractura se muestra en la Figura II.12.
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 35
Figura II.13 Supinación-aducción.
Fracturas directas del tobillo: son causadas por desplazamiento de astrágalo al interior de la tibia distal, causando una fractura por estallamiento. Hay tres tipos: I, II y III.
o Tipo I. Esta fractura se muestra en la figura I.14.
Figura II.14 Fractura directa del tobillo tipo I o Tipo II. Esta fractura se muestra en la Figura II.15.
Figura II.15 Fractura directa del tobillo tipo II
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 36
Figura II.16 Fractura directa del tobillo tipo III
También existen fracturas de pie, las cuales pueden afectar a todo el sistema de amortiguado, como puede ser en algún salto, algún tropezón involuntario al caminar, o en el ejercicio de correr. Si se amputan los dedos o la parte del metatarso, habrá problemas y se deberá diseñar una prótesis de pie que cumpla con los amortiguamientos de estas partes [22].
II.5.3 Infección.
La infección aguda o crónica que no responde al tratamiento médico o quirúrgico puede ser indicación para la amputación. La gangrena gaseosa fulminante es la más peligrosa y suele exigir una amputación inmediata a nivel proximal, la herida se deja abierta. La amputación en infecciones crónicas suele estar indicada porque la osteomielitis crónica o la fractura infectada han deteriorado ya la función [19].
II.5.4 Tumores
Suele estar indicada en tumores malignos sin signos de diseminación metastásica. El objetivo de la amputación es resecar la neoplasia maligna antes de que metastatice. Puede estar justificada para aliviar el dolor cuando una neoplasia ha empezado a ulcerarse e infectarse o ha provocado una fractura patológica. El nivel de amputación debe ser lo suficiente proximal para la recidiva local del tumor [19].
Capítulo II Generalidades y marco teórico
DISEÑO DE UNA PRÓTESIS
DISEÑO DE UNA PRÓTESIS TRANSTIBIAL AMORTIGUADA 37
La longitud ideal para amputaciones por debajo de la rodilla es de 12 cm y nunca mayor de 15cm [23]. Tomando en cuenta este resultado y la longitud promedio de la pierna, el amortiguador se dimensionó para idealizarse. En la Figura II.17 se muestran los distintos niveles de amputación, según su funcionalidad.
Figura II.17 Niveles de amputación
II.7 Biomecánica
En esta sección se analizarán los fenómenos físicos que ocurren en la pierna, pie y tobillo para comprender la estática y dinámica de la articulación y así tener las bases para el diseño de la prótesis.