INSTITUTO POLITÉCNICO NACIONAL
Escuela Superior de Ingeniería Mecánica y Eléctrica
Unidad Zacatenco
“
MODELO ANALÍTICO DE LA PROPAGACIÓN DE
ONDAS LARGAS LINEALES QUE SE PROPAGAN
SOBRE UNA ESTRUCTURA CICLOIDAL
”
T E S I S
QUE PARA OBTENER EL TITULO DE:
INGENIERO EN SISTEMAS AUTOMOTRICES
PRESENTA:
PRESENTA:
AYRTON ALFONSO MEDINA RODRÍGUEZ
DIRECTOR DE TESIS:
Dr. ERIC GUSTAVO BAUTISTA GODÍNEZ.
INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELECTRLCA
UNIDAD PROFESIONAL "ADOLFO LÓPEZ MATEOS"
TEMA DE TESIS
QUE PARA OBTENER EL TÍTULO INGENIERO EN SISTEMAS AUTOMOTRICES POR LA OPCIÓN DE TITULACIÓN TESIS Y EXAMEN ORAL INDIVIDUAL
DEBERA (N) DESARROLLAR AYRTON ALFONSO MEDINA RODRÍGUEZ
"MODELO ANALÍTICO DE LA PROPAGACIÓN DE ONDAS LARGAS LINEALES QUE SE PROPAGAN SOBRE UNA ESTRUCTURA CICLOIDAL"
CARACTERIZAR LA HIDRODINÁMICA DE ONDAS LARGAS LINEALES USANDO UN MÉTODO NUEVO DE SOLUCIÓN DE ECUACIONES DIFERENCIALES CON COEFICIENTES VARIABLES.
• INTRODUCCIÓN.
• FORMULACIÓN DEL PROBLEMA. • SOLUCIÓN MATEMÁTICA.
• ANÁLISIS DE RESULTADOS. • CONCLUSIONES.
MÉXICO D.F., A 09 DE MARZO DEL 2015.
ASESORES
DR.
A
´Indice general
Resumen III
Abstract V
Lista de figuras VII
Nomenclatura IX
1. Introducci ´on 1
1.1. Motivaci ´on . . . 1
1.2. Antecedentes . . . 5
1.3. Propuesta . . . 8
1.4. Objetivos . . . 12
2. Formulaci ´on del problema 13 2.1. Modelo f´ısico . . . 13
2.2. Ecuaciones de Gobierno . . . 15
2.3. Hip ´otesis . . . 16
2.4. Variables adimensionales . . . 16
3. Soluci ´on matem´atica 22 3.1. Soluci ´on anal´ıtica para el l´ımite deκ2 ∼O(1) . . . 22
3.2. Condiciones de frontera . . . 25
4. An´alisis de resultados 29
4.1. Cicloide . . . 29 4.2. Semi-cicloide . . . 34 4.3. Cicloide generalizado . . . 37
Conclusiones 43
Referencias 45
A. Teor´ıa de ondas largas 49
Resumen
Abstract
´Indice de figuras
1.1. Geotubo como rompelas sumergido. . . 3 1.2. Geotubo de alta resistencia llenado hidr´aulicamente de una
mezcla de arena y agua utilizado para el control de la ero-si ´on costera. . . 4 1.3. Representaci ´on esquem´atica de la propagaci ´on del oleaje
sobre un fondo variable: (a) propagaci ´on del oleaje hacia la transici ´on curva, (b) defromaci ´on del oleaje sobre la curva, (c) oleaje reflejado y transmitido. . . 9 1.4. Prototipo experimental: (a) vista de la secci ´on tranversal, (b)
vista en perspectiva y (c) superposici ´on del prototipo ex-perimental, la distribuci ´on cicloidal y la soluci ´on num´erica propuesta por Guoet al.[2]. . . 10
2.1. Diagrama de vista lateral del modelo f´ısico estudiado. La amplitud del oleajeAw para w=I, R y T, representan el
oleaje incidente (viajando de izquierda a derecha), reflejado y transmitido, respectivamente; θ es el ´angulo del circulo generador del arco de cicloide con radio r y θL es el valor
m´aximo de θ en x = L. El modelo f´ısico est´a conformado por tres regionesR1,R2 yR3. . . 13
4.1. Caso 1. Coeficiente de reflexi ´onCRy transmisi ´onCT en
fun-ci ´on del par´ametro adimensional relativo de profundidades
4.2. Caso 1. Coeficiente de reflexi ´onCRy transmisi ´onCT en
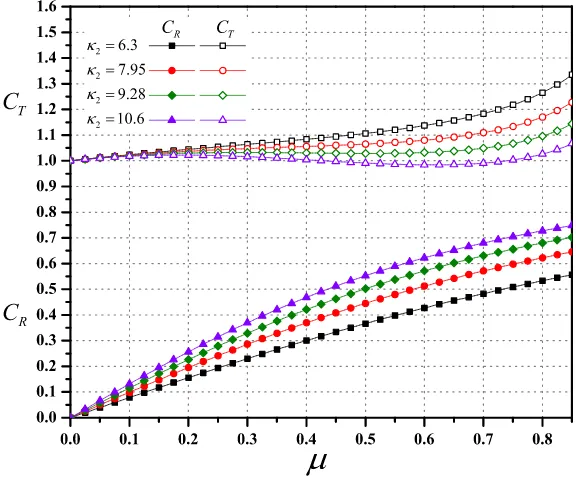
fun-ci ´on del par´ametro adimensional fun-cinem´aticoκ2para valores distintos del par´ametroµ.. . . 31 4.3. Caso 1. Amplitud adimensional de las ondas largas en
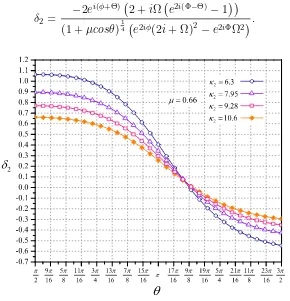
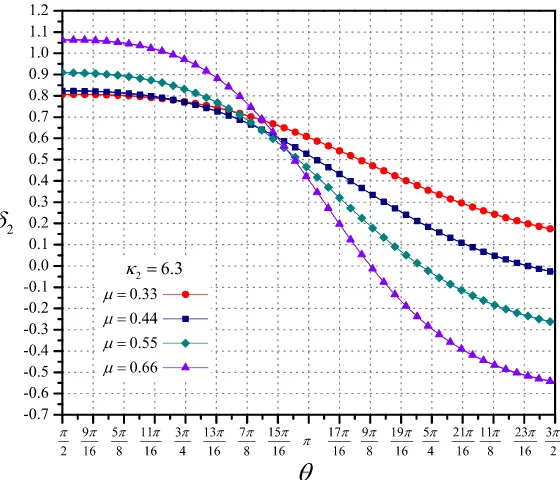
fun-ci ´on del par´ametro adimensional θ, con un µ = 0.66 para valores distintos del par´ametro cinem´aticoκ2. . . 32 4.4. Caso 1. Amplitud adimensional de las ondas largas en
fun-ci ´on del par´ametro adimensional θ, con un κ2 = 6.3 para valores distintos del par´ametroµ. . . 33 4.5. Caso 2. Coeficiente de reflexi ´onCRy transmisi ´onCT en
fun-ci ´on del par´ametro adimensional relativo de profundidades
µpara valores distintos del par´ametro cinem´aticoκ2. . . 35 4.6. Caso 2. Coeficiente de reflexi ´onCRy transmisi ´onCT en
fun-ci ´on del par´ametro adimensional fun-cinem´aticoκ2para valores distintos del par´ametroµ. . . 36 4.7. Caso 2. Amplitud adimensional de las ondas largas en
fun-ci ´on del par´ametro adimensional θ, con un µ = 0.66 para valores distintos del par´ametro cinem´aticoκ2. . . 37 4.8. Caso 2. Amplitud adimensional de las ondas largas en
fun-ci ´on del par´ametro adimensional θ, con un κ2 = 6.3 para valores distintos del par´ametroµ. . . 38 4.9. Caso 3. Coeficiente de reflexi ´onCRy transmisi ´onCT en
fun-ci ´on del par´ametro adimensional relativo de profundidades
µpara valores distintos del par´ametro cinem´aticoκ2. . . 39 4.10. Caso 3. Coeficiente de reflexi ´onCRy transmisi ´onCT en
fun-ci ´on del par´ametro adimensional fun-cinem´aticoκ2para valores distintos del par´ametroµ. . . 40 4.11. Caso 3. Amplitud adimensional de las ondas largas en
Nomenclatura
Letras latinas
AI Amplitud del oleaje incidente,[m]
AR Amplitud del oleaje reflejado,[m]
AT Amplitud del oleaje transmitido,[m]
c Velocidad de fase,[m/s]
CR Coeficiente de Reflexi ´on
CT Coeficiente de Transmisi ´on
E Energ´ıa del oleaje,[kgm3/s3]
¯
F Flujo de energ´ıa del oleaje,[kgm2/s2]
g Aceleraci ´on de la gravedad,[m/s2]
h Profundidad del agua,[m]
h1 Profundidad de la regi ´on 1,[m]
h2[x(θ)] Profundidad de la regi ´on 2,[m]
h3 Profundidad de la regi ´on 3,[m]
H Altura del oleaje,[m]
t tiempo,[s]
i √−1
k N ´umero de onda,k = 2π/λ
L Longitud caracter´ıstica de la regi ´on 2,[m]
P Presi ´on hidrost´atica,[N/m2]
PD Presi ´on din´amica,[N/m2]
r Radio del c´ırculo generador del arco de cicloide,[m]
T Per´ıodo del oleaje,[s]
u Velocidad instant´anea horizontal,[m/s]
U Velocidad media del agua en la direcci ´onx,[m/s]
w Velocidad instant´anea vertical,[m/s]
x Eje de coordenadas horizontal
y Eje de coordenadas lateral
z Eje de coordenadas vertical
S´ımbolos griegos
βI Constante compleja del oleaje incidente
βR Constante compleja del oleaje reflejado
βT Constante compleja del oleaje transmitido
χj Eje coordenado longitudinal adimensional
∆j(χ,τ) Superficie libre adimensional del oleaje
δj(χ) Superficie libre del oleaje adimensional espacial
θ Angulo del cicloide,´ [rad]
θL Valor m´aximo del ´angulo del cicloide,[rad]
κ2 Par´ametro cinem´atico adimensional
λ Longitud de onda,[m]
µ Relaci ´on de profundidades
ρ Densidad del agua,[kg/m3]
φ Potencial de velocidad
ω Frecuencia angular del oleaje,[1/s] ζ(x, t) Superficie libre del oleaje,[m]
Sub´ındices
I, R, T Incidente, Reflejado y Transmitido, respectivamente
j 1, 2 y 3
Cap´ıtulo 1
Introducci ´on
1.1.
Motivaci ´on
La l´ınea de costa es un espacio din´amico de cambios naturales, en la cual se desarrollan diversas actividades humanas, como son: comerciales, recreativas, de vivienda, entre otras. ´Esta ocupa menos del 15 % de la su-perficie terrestre y se estima que 3.1 mil millones de personas viven dentro de un ´area de 200 kil ´ometros de distancia del mar. Para el 2025 se espera que tres cuartas partes de la poblaci ´on mundial vivan en una zona cerca-na a la costa [3]. Generalmente, las zocerca-nas costeras son importantes para el buen funcionamiento de muchas naciones, siendo las ´areas m´as desarro-lladas. Adem´as, permiten el intercambio de recursos para la producci ´on de bienes y servicios siendo el centro de la mayor´ıa de actividades comer-ciales e industriales.
Existen diversas formas para combatir la erosi ´on, pero son procesos muy costosos para los gobiernos locales. Algunas ciudades reponen sus playas por medio de un proceso, que consiste en importar arena de re-giones alejadas de la playa que reemplace la arena perdida a causa de la erosi ´on. Este proceso de regeneraci ´on de playas ocurre por lo regular cada 5 a ˜nos [4]. Repetir este proceso puede ser costoso y es una soluci ´on que no ayuda a resolver de manera definitiva el problema.
Para proteger las costas, una de las caracter´ısticas hidrodin´amicas que se estudia con mayor frecuencia es la reflexi ´on del oleaje. Las estructuras naturales y/o artificiales pueden contribuir a modificar su mec´anica; una de estas estructuras artificiales son los rompeolas. ´Estas brindan protec-ci ´on y controlan la erosi ´on en las ´areas costeras. Generalmente, ´estos se dividen en dos grupos: los que s ´olo aten ´uan la energ´ıa del oleaje y los que bloquean totalmente el flujo del oleaje hacia la costa. Los primeros, a su vez se dividen en rompeolas sumergidos, flotantes, neum´aticos e hidr´aulicos.
Los rompeolas sumergidos han llegado a ser m´as comunes en los a ˜nos recientes. Frecuentemente, son la soluci ´on preferida cuando se requiere una protecci ´on completa de las costas. Entre las ventajas que proporcio-nan se encuentran que dan una imagen m´as est´etica que los rompeolas comunes, que son muy evidentes a la vista. Esta caracter´ıstica est´etica es importante para mantener el valor tur´ıstico de muchas playas y es usual-mente una de las consideraciones del uso de tales estructuras en la protec-ci ´on costera [5]. ´Estos, ayudan a reduprotec-cir la erosi ´on en las playas causando que una cierta cantidad de la energ´ıa incidente del oleaje se disipe al pasar sobre ellos, en lugar de bloquear totalmente el flujo que se dirige a la cos-ta. Adicionalmente, permiten el tr´ansito libre de la fauna marina y de los transportes litorales de sedimentos.
artifi-ciales. Adicionalmente, debido a su costo bajo y a su efectividad en la dis-minuci ´on de la energ´ıa del oleaje, los rompeolas sumergidos han cobrado importancia en el ´area de la hidr´aulica mar´ıtima. Los rompeolas sumergi-dos presentan una variedad de formas y su rendimiento suele evaluarse con base en los resultados obtenidos en la pr´actica [7].
Figura 1.1. Geotubo como rompelas sumergido.
tanto en tierra como en el mar y en ocasiones son apilados para formar diques de mayor altura u otros tipos de estructuras geot´ecnicas.
Figura 1.2. Geotubo de alta resistencia llenado hidr´aulicamente de una mezcla de arena y agua utilizado para el control de la erosi ´on costera.
Los geotubos poseen ventajas con respecto a otras estructuras ya que su impacto es m´ınimo en el ambiente, presentan un bajo costo respecto a otras estructuras tradicionales, as´ı como de mantenimiento, y ostentan una gran resistencia. Su uso es cada vez m´as extenso y m´as son los lugares en los cuales se opta por esta opci ´on como un medio para conservar y regenerar las playas.
1.2.
Antecedentes
Los geotubos se emplazan en aguas someras, la hidrodin´amica del oleaje en estas regiones puede estudiarse con la teor´ıa de ondas largas, la cual tiene la caracter´ıstica de que el campo de velocidades fundamen-talmente es en un plano horizontal y las velocidades verticales se asumen peque ˜nas, en comparaci ´on con las horizontales.
En el pasado, muchos investigadores han desarrollado estudios funda-mentales para caracterizar los efectos geom´etricos de obst´aculos sumer-gidos sobre la reflexi ´on del oleaje. Lamb [9] fue uno de los pioneros en desarrollar una soluci ´on anal´ıtica para la reflexi ´on y transmisi ´on de ondas largas que se propagan sobre un escal ´on finito, usando condiciones de aco-plamiento para la superficie y el flujo de masa en la frontera [5]. Kreiss [10] investig ´o el efecto de la fricci ´on de fondo en la deformaci ´on de ondas pe-ri ´odicas, que se propagan en un canal semi-cerrado. Gallagher et al.[11] analizaron la deformaci ´on no lineal de ondas largas en aguas poco pro-fundas causada por los siguientes efectos: la amplitud finita del oleaje, la pendiente en el fondo y la fricci ´on. La soluci ´on de la ecuaci ´on de gobierno se determin ´o empleando m´etodos de perturbaci ´on y m´etodos num´ericos.
Aubrey et al. [12] estudiaron experimentalmente la deformaci ´on de mareas astron ´omicas en estuarios poco profundos durante un tiempo de observaci ´on de 29 d´ıas, identificando las interacciones no lineales asocia-das con el equilibrio del oc´eano. Posteriormente, Speeret al.[13] obtuvie-ron la soluci ´on de la ecuaci ´on de conservaci ´on de la cantidad de movi-miento tomando en cuenta efectos geom´etricos y de fricci ´on en el fondo del canal. Con base en estos efectos, determinaron la influencia que tienen en la asimetr´ıa de la elevaci ´on de la superficie libre y en la deformaci ´on de la velocidad de las part´ıculas del agua.
y din´amicos que permitieron que su modelo derivara en un problema de perturbaci ´on singular. Mead [15] propuso un m´etodo anal´ıtico en coorde-nadas lagrangianas, con el prop ´osito de trazar la trayectoria de las part´ıcu-las y evitar la generaci ´on de malpart´ıcu-las complejas. Lauteret al.[16] presenta-ron una soluci ´on anal´ıtica de las ecuaciones de aguas someras, transforma-das de un sistema cartesiano fijo a un sistema cartesiano rotatorio, donde modelaron el campo de velocidades de las part´ıculas del agua. Por otro la-do, Camassaet al.[17] estudiaron la din´amica del oleaje en aguas someras basados en una estructura Hamiltoniana e implementaron un algoritmo, donde el sistema de ecuaciones diferenciales ordinarias tienen soluci ´on en un tiempo finito.
La deformaci ´on y reflexi ´on del oleaje debidas a estructuras naturales (arrecifes de coral, plataformas continentales) y artificiales (rompeolas, di-ques de abrigo) son un importante t ´opico en el dise ˜no de estructuras cos-teras. Ohareet al.[18] estimaron el coeficiente de reflexi ´on del oleaje que se propaga sobre un fondo con transiciones variables.
con geotextiles.
En la literatura especializada, se pudo identificar que los trabajos re-lacionados con los geotubos, estudian fundamentalmente los esfuerzos a los que est´a sometida la geomembrana cuando se encuentra en el procedi-miento de llenado con arena, a partir de estas condiciones, se revisan las geometr´ıas que est´an sometidas a menores cargas por llenado. Otro de los intereses en las investigaciones, es estudiar el comportamiento mec´anico de estas estructuras, cuando se encuentran interactuando entre s´ı. Por otra parte, pudo verificarse que la estabilidad de los geotubos se estudia en for-ma experimental y num´erica cuando ´estos se encuentran bajo la acci ´on del oleaje. Cabe precisar que en los trabajos antes mencionados, el objeto de estudio es el geotubo y no el efecto que ´este produce en la disipaci ´on del flujo de energ´ıa del oleaje, que es el objetivo principal de estas estructuras. Con base en los comentarios anteriores, en esta tesis se propone obtener una soluci ´on anal´ıtica que permita analizar la hidrodin´amica del oleaje cuando ´este se propaga sobre un rompeolas que sigue una distribuci ´on cicloidal.
1.3.
Propuesta
El fen ´omeno de propagaci ´on de las ondas largas sobre estructuras su-mergidas en el fondo del mar, se muestra en la Fig. 1.3. Como se observa en la Fig. 1.3 (a), el oleaje proveniente del oc´eano se propaga sobre la re-gi ´on 1. En la rere-gi ´on 2, el oleaje se deforma a lo largo del obst´aculo como se ilustra en la Fig. 1.3 (b). Esto genera que la onda incidente se divida en dos ondas: una onda reflejada que viaja en el sentido contrario de la on-da incidente y una transmition-da que viaja en el mismo sentido de la onon-da incidente hacia la regi ´on 3, como se muestra en la Fig. 1.3 (c).
obe-Ola incidente
Ola reflejada Ola transmitida
a)
b)
c)
Región 1Región 2
[image:22.595.167.437.129.415.2]Región 3
Figura 1.3. Representaci ´on esquem´atica de la propagaci ´on del oleaje sobre un fon-do variable: (a) propagaci ´on del oleaje hacia la transici ´on curva, (b) defromaci ´on del oleaje sobre la curva, (c) oleaje reflejado y transmitido.
decer, como primera aproximaci ´on, una geometr´ıa cicloidal, la cual sigue las siguientes ecuaciones par´ameticas, Tang [27],
M =r(θ−sinθ) (1.1)
y
N =r(1−cosθ), (1.2)
donde(M, N)son las coordenadas del puntoP referenciado a los ejesX¯ y
¯
Z
X θ= /2π
P(M,N)
θL=π
θL=3 /2π
r θ c) 0.00 0.01 0.02 0.03 0.04 b) a) H Geometría Cicloidal
Solución numérica Guoet al.[2]
0.02 0.04 0.06 0.08 0.10 0.12 0.00
-0.01
[image:23.595.128.484.124.336.2]-0.02
Figura 1.4. Prototipo experimental: (a) vista de la secci ´on tranversal, (b) vista en perspectiva y (c) superposici ´on del prototipo experimental, la distribuci ´on cicloi-dal y la soluci ´on num´erica propuesta por Guoet al.[2].
Para verificar lo anterior, comparamos la transici ´on cicloidal, Ecs. (1.1) y (1.2), con la soluci ´on num´erica para una secci ´on transversal de un geo-tubo sim´etrico, que descansa sobre una base r´ıgida como fue propuesto por Guoet al.[2], la cual est´a dada por la siguiente ecuaci ´on diferencial no lineal de segundo orden
U′′ =−1 T
!
P0+γV "#
1 +U′2$3/2 , (1.3)
con
T = 1 2P0+
1 4γ(H)
4
(1.4)
y las condiciones de frontera
dU!
V = 0"
y
dU!
V =H"
dV =−∞, (1.6)
dondeH es la altura de la secci ´on transversal,U =X −πryV = 2r−Z
son las cordenadas que definen la geometr´ıa de la secci ´on transversal. El origen de las coordenadas anteriores es tomado en la parte superior de la secci ´on transversal. La presi ´on de bombeo usada para llenar el geotubo con la mezcla esP0. La fuerza de tensi ´on circunferencial en el tubo por uni-dad de ancho a lo largo de la secci ´on transversal es T y el peso espec´ıfico est´a denotado porγ.
Adicionalmente, se realiz ´o un peque ˜no prototipo f´ısico de un geotu-bo: ´este consiste en llenar a 80 % de su volumen una bolsa rectangular de pl´astico, la cual tiene un ancho y un largo de 13.5 cm y 30 cm, respec-tivamente, con una mezcla de un 1 kg de yeso y 0.7 L de agua. El peso espec´ıfico de la mezcla esγ = 8335N/m3.
Cuando la mezcla se endureci ´o, se realiz ´o un corte transversal al mo-delo experimental, la forma resultante de la secci ´on transversal junto con la vista en perspectiva se muestran en la Fig. 1.4-a y Fig. 1.4-b, respecti-vamente. El radio de la secci ´on transversal del prototipo tiene el valor de
r = 0.02m
1.4.
Objetivos
Objetivo general:
Caracterizar la hidrodin´amica del oleaje, en condici ´on de teor´ıa lineal de ondas largas, mediante la implementaci ´on de un m´etodo nuevo de so-luci ´on de ecuaciones diferenciales con coeficientes variables.
Objetivos particulares:
Proponer un modelo matem´atico adimensional de la propagaci ´on del oleaje sobre una superficie con distribuci ´on cicloidal.
Determinar una soluci ´on anal´ıtica de la deformaci ´on de la superficie libre del oleaje que se propaga sobre un fondo con transici ´on cicloi-dal.
Cap´ıtulo 2
Formulaci ´on del problema
[image:26.595.123.484.356.556.2]2.1.
Modelo f´ısico
Figura 2.1. Diagrama de vista lateral del modelo f´ısico estudiado. La amplitud del oleajeAw para w =I, R y T, representan el oleaje incidente (viajando de
izquierda a derecha), reflejado y transmitido, respectivamente;θes el ´angulo del
El modelo f´ısico estudiado se muestra en la Fig. 2.1. Consideremos un oleaje largo lineal que se propaga de izquierda a derecha sobre una tran-sici ´on cicloidal. En el diagrama, el modelo f´ısico se encuentra divido en tres diferentes regionesR1,R2 yR3. En el sistema de coordenadas que se seleccion ´o, el eje x es positivo a la derecha con el origen en la intersec-ci ´on de las regiones R1 y R2, mientras que el eje z apunta hacia arriba, normal al nivel medio del agua. El intervalo de transici ´on de la regi ´onR2 es 0 ≤ x ≤ L, mientras que las regiones R1 y R3 son definidas por los intervalos−∞ ≤x≤0yL≤x≤ ∞, respectivamente.
Adicionalmente, asumimos que las profundidades en las regiones R1 y R3 son constantes. En el presente an´alisis, asumimos que el fondo es impermeable. Sin embargo, las fronteras verticales izquierda y derecha de los extremos del sistema est´an completamente abiertas al flujo del oleaje. En particular, asumimos que en el lado izquierdo existe oleaje incidente y reflejado y s ´olo en el lado derecho hay presencia de oleaje transmitido.
El origen de la geometr´ıa cicloidal, descrito por las Ecs. (1.1)-(1.2) es trasladado al origen del nuevo sistema de referenciax−z, el cual est´a lo-calizado en θ = π/2; el m´aximo valor del ´angulo θ es θL, donde π/2 <
θL ≤ 2π. Para el caso particular deθL(= 3π/2),h3 =h1 yh1 =h1−r, res-pectivamente. Tomando en cuenta las consideraciones mencionadas, las profundidades prescritas a lo largo de las tres regiones est´an dadas por las siguientes relaciones
h=
h1 ; x≤0,
h2[x(θ)] =h1+rcosθ ; 0≤x(θ)≤L, π2 ≤θ≤θL,
h3 ; x≥L.
(2.1)
y la ecuaci ´on param´etrica para la distribuci ´on horizontal a lo largo del eje
xen la regi ´onR2, est´a dada por
x(θ) = r#θ−sinθ+ 1− π
2
$
De la expresi ´on anterior se puede deducir que la longitudLde la tran-sici ´on cicloidal puede expresarse como
L=r#θL−sinθL+ 1−
π 2
$
(2.3)
y la profundidadh3se obtiene de la Ec. (2.1) y se define como
h3 =h1+rcosθL (2.4)
2.2.
Ecuaciones de Gobierno
En el presente trabajo, se usan las ecuaciones de gobierno que descri-ben el movimiento de las ondas largas que presentan densidad constante y viscosidad despreciable. En la aproximaci ´on de aguas someras, el movi-miento dominante es en el plano horizontal, debido a que la velocidad ver-tical es d´ebil. El flujo de fluido en la regi ´onR2 lo gobiernan las ecuaciones bidimensionales de continuidad y de cantidad de movimiento, Svendsen (2006) [28]
∂ζ
∂t +∇h·[V(h2+ζ)] = 0 (2.5)
y
∂V
∂t + (V·∇h)V+g∇hζ = 0, (2.6)
donde el operador∇hest´a definido como∇h = (∂/∂x,∂/∂y),ζ =ζ(x, y, t)
es es la elevaci ´on de la superficie libre, medida a partir del nivel me-dio del agua en condici ´on de reposo, V es el vector velocidad dado por
V = (U, V)dondeU = )ζ
−h2udz/(ζ+h2)y V =
)ζ
−h2vdz/(ζ+h2)son las velocidades medias en la direcci ´onxyy, respectivamente;u=u(x, y, z, t)
yv =v(x, y, z, t)son las componentes de la velocidad local en la direcci ´on
2.3.
Hip ´otesis
El flujo es irrotacional.
Teor´ıa de ondas con amplitud peque ˜naAI/h(1.
La longitud de onda del oleaje es mucho mayor que la profundidad
h/λ(1.
La velocidad en direcci ´on vertical es despreciable comparada con la velocidad en direcci ´on horizontal.
El oleaje perturbado se debe ´unicamente al efecto que tiene la geo-metr´ıa ubicada en el fondo del mar.
2.4.
Variables adimensionales
Las ecuaciones de aguas someras descritas arriba, Ecs. (2.5) y (2.6), pue-den escribirse de una manera m´as apropiada usando un an´alisis de orde-nes de magnitud. Para oleaje de amplitud peque ˜na, las siguientes relacio-nes se satisfacen:
ζ h2 ∼
AI
h1 (
1, (2.7)
dondeAI es la amplitud del oleaje incidente. Denotanto la escala de
tiem-po caracter´ıstica con el periodoT, la escala de longitud horizontal carac-ter´ıstica es L y para ondas largas lineales no dispersivas la celeridad de onda caracter´ıstica est´a dada porc=√gh1 =ω/k, donde la frecuencia del oleaje es ω = 2π/T y el n ´umero de onda k = 2π/λ. Como una primera aproximaci ´on y para aquellas ondas con amplitud peque ˜na, se considera que U, V yζ son peque ˜nas; por lo tanto, sus productos tambi´en son pe-que ˜nos, Dean (1984) [29, p´ag. 136]. En este caso y de la Ec. (2.6), la veloci-dad caracter´ısticaUc se determina mediante un balance entre los t´erminos
Uc
T ∼ gAI
L . (2.8)
Sustituyendo la celeridad caracter´ıstica,c, en la relaci ´on anterior, la ve-locidad caracter´ıstica puede escribirse como,
Uc =
AI
h1
λ
Lc . (2.9)
Del an´alisis anterior, podemos introducir las siguientes variables adi-mensionales
χ2 = Lx, Y2 = Lyy, ˜h= h2[hx1(θ)], τ =ωt, ∆2(χ2, Y2,τ) = AζI,
U2(χ2, Y2,τ) = AhI1cLλU y V2(χ2, Y2,τ) = AhI1cLλV.
En t´erminos de las variables adimensionales anteriores, las ecuaciones de gobierno, Eqs. (2.5) y (2.6) toman la forma siguiente:
∂∆2
∂τ +
µ2 1
2π ∂*U2
#
˜
h+ν∆2$+
∂χ2
+µ1µ2 2π
∂*V2 #
˜
h+ν∆2$+
∂Y2
= 0, (2.10)
∂U2
∂τ +
νµ2 1
2π U2 ∂U2
∂χ2
+νµ1µ2 2π V2
∂U2
∂Y2
=− 1
2π ∂∆2
∂χ2
(2.11)
y
∂V2
∂τ +
νµ2 1
2π U2 ∂V2
∂χ2
+νµ1µ2 2π V2
∂V2
∂Y2
=−µ3 2π
∂∆2
∂Y2
. (2.12)
En las ecuaciones anteriores, los par´ametros adimensionales est´an de-finidos como
µ1 =
λ
L, µ2 = λ Ly
, µ3 =
L Ly
y ν = AI
h1
.
longitud horizontal caracter´ıstica L son del mismo orden de magnitud, para rompeolas de gran longitud Ly ) λ, normal a la hoja, µ2 ( 1 y
µ3 (1es un par´ametro geom´etrico de esbeltez.
Por lo tanto, como una primera aproximaci ´on, las ecuaciones anteriores se simplifican y pueden ser escritas en la forma:
∂∆2
∂τ +
µ2 1
2π
∂*U2˜h +
∂χ2
= 0, (2.13)
∂U2
∂τ =−
1 2π
∂∆2
∂χ2
(2.14)
y
∂V2
∂τ ≈0. (2.15)
La ´ultima relaci ´on, Eq. (2.15), implica que(µ3/2π)∂∆2/∂Y ≈0y por lo tanto, el movimiento a lo largo del ejexes dominante.
De lo anterior, las ecuaciones de gobierno simplificadas para el movi-miento de ondas largas lineales en la regi ´on R2 est´an dadas por las Ecs. (2.13) y (2.14). Ecuaciones similares pueden obtenerse para las regiones
R1 y R3, las cuales son mostradas m´as adelante. Las ecuaciones de con-tinuidad y de cantidad de movimiento (2.13) y (2.14) pueden combinarse en una ´unica expresi ´on. Para este prop ´osito, podemos derivar la Ec. (2.13) con respecto al tiempo adimensional, τ, y reemplazar la Ec. (2.14) en la ecuaci ´on resultante. El procedimiento anterior nos conduce a la siguiente ecuaci ´on,
∂2∆ 2
∂τ2 =κ
2 2 , ˜ h∂ 2∆ 2
∂χ22 + ∂∆2
∂χ2
∂˜h ∂χ2
-. (2.16)
Tomando en cuenta las Ecs. (2.1) y (2.3), la Ec. (2.16) escrita en t´erminos del ´anguloθ, se expresa como
1 κ2 2
∂2∆ 2
∂τ2 =
.
(1 +µcosθ) (1−cosθ)2
d2∆ 2
dθ2 −
(1 +µ) sinθ (1−cosθ)3
d∆2
dθ
/
En la ecuaci ´on superior, los par´ametros adimensionales κ2 y µ est´an dados por
κ2 =
√
gh1
ωr = λ
2πr y µ= r h1
La Ec. (2.17) requiere para su soluci ´on dos condiciones iniciales y dos de frontera, las cuales se obtienen mediante el siguiente procedimiento. La linealidad del problema permite expresar la elevaci ´on de la superficie libre adimensional como una funci ´on harm ´onica en el tiempo. Por lo tanto, tenemos que el oleaje en la regi ´onR2 est´a dado por la siguiente expresi ´on
∆2(θ, t) = Re0δ2(θ)e−iτ1
(2.18)
donde∆2 es la amplitud del oleaje en cualquier secci ´on transversal de la
regi ´onR2,i=√−1y Re indica la parte real del argumento. De la Ec. (2.18), las condiciones iniciales est´an dadas por
∆2(θ,0) = Re[δ2(θ)]
∂∆2(θ,0)
∂τ =Re[−iδ2(θ)]
Se debe considerar que las relaciones antes mencionadas son funciones de la amplitd adimensional δ2 del oleaje para cualquier secci ´on transver-sal a lo largo del ´angulo θ, la cual es una funci ´on desconocida y es una parte del problema a resolver. Para oleaje largo lineal la presi ´on permane-ce hidrost´atica, i.e. P(x, t) = ρg(ζ−z), dondeρes la densidad del agua, la cual en variables adimensionales est´a escrita como P˜ = (∆j −z˜), con
˜
P = P/ρgAI yz˜= z/AI. Podemos considerar que la presi ´on es la misma
en cualquier lado de la onda en las interfaces θ = π/2 o θ = θL. Por lo
tanto, las condiciones de frontera de la Ec. (2.17), pueden escribirse como,
y
θ =θL : ∆2(θL) =∆3(κ3L). (2.20) En el l´ımite deκ2 )1, la Ec. (2.17), se reduce a la siguiente expresi ´on
(1 +µcosθ)∂
2∆ 2
∂θ2 −(1 +µ) cot
θ 2
∂∆2
∂θ = 0 (2.21)
donde claramente se puede apreciar en la Ec. (2.21), que el t´ermino de la aceleraci ´on desaparece, el cual desde una perspectiva f´ısica indica que la elevaci ´on de la superficie adimensional ∆2 es desacelerada y que ´esta es
s ´olo una funci ´on del parametro µ. El modelo anterior puede ser presen-tado para valores peque ˜nos de la frecuencia del oleaje y valores fijos de la profundidad h1 y el radior. Sin embargo, se debe tener en cuenta que la presente formulaci ´on es una primera aproximaci ´on y para condiciones m´as realistas deben tomarse en cuenta mecanismos de disipaci ´on del olea-je, como son: la fricci ´on del fondo y la rotura.
Introduciendo la Ec. (2.18) en la Ec. (2.17), podemos obtener el siguiente problema de valores en la frontera
κ22(1 +µcosθ) (1−cosθ)2
d2δ 2
dθ2 −
κ22(1 +µ) sinθ (1−cosθ)3
dδ2
dθ +δ2 = 0 (2.22)
con las condiciones de frontera
θ =π/2 : δ2(π/2) =δ1(0) (2.23)
y
θ=θL : δ2(θL) =δ3(κ3L). (2.24)
cuales se obtienen a continuaci ´on. La ecuaci ´on de onda para flujo no per-manente en las regionesR1yR3se obtienen por un procedimiento similar al que se describi ´o.
Introduciendo las siguiente variables adimensionales para la regi ´onR1
χ1 =k1x, δ1 =
ζ(x)
AI
y para la regi ´onR3
χ3 =k3x y δ3 =
ζ(x)
AI
,
dondek1 = (gh1)1/2/ωyk3 = (gh3)1/2/ωrepresentan los n ´umeros de onda para las regionesR1yR3, respectivamente.
La ecuaciones de gobierno que describen el movimiento del oleaje en las regionesR1 yR3est´an dadas por
d2δj
dχ2j +δj = 0 paraj = 1y3 (2.25)
Las soluciones a la Ec. (2.25) son triviales y se expresan en la forma siguiente:
Para la regi ´onR1 es
δ1(χ1) =eiχ1 +βRe−iχ1 (2.26)
y para la regi ´onR3 tenemos
δ3(χ3) = βTeiχ3 (2.27)
En las expresiones anterioresβR = AR/AI y βT = AT/AI son
ampli-tudes complejas adimensionales de la reflexi ´on y transmisi ´on del oleaje. Evaluando la Ec. (2.26) en χ1 = 0, podemos obtener que δ1(0) = 1 + βR
y para χ3 = k3L, δ3(k3L) = βTeik3L. Estas relaciones son justamente las
Cap´ıtulo 3
Soluci ´on matem´atica
3.1.
Soluci ´on anal´ıtica para el l´ımite de
κ
2∼
O
(1)
En esta secci ´on, se obtiene una soluci ´on anal´ıtica de la ecuaci ´on diferen-cial de segundo orden, Ec. (2.22), para el l´ımite del par´ametroκ2 ∼O(1). El par´ametroκ2 proporciona una medida de la magnitud de los efectos gra-vitacionales(gh1)1/2relativos a los efectos inerciales(ωr)o, de una manera m´as simple, el par´ametroκ2 puede ser definido como la relaci ´on entre la longitud de onda(λ)y el radio(r). Por otro lado, el par´ametroκ2 no pue-de tomar valores pue-deκ2 (1, porque para este l´ımite la condici ´on de ondas largas lineales no es satisfecha.
La presente metodolog´ıa anal´ıtica es capaz de proporcionar una visi ´on r´apida en c ´omo la soluci ´on depende de los dos par´ametros del problema;
µyκ2. Con la finalidad de obtener la soluci ´on anal´ıtica de la Ec. (2.22), se emplea un m´etodo efectivo para encontrar soluciones especiales de ecua-ciones diferenciales con coeficientes variables, el cual se basa en encontrar una ecuaci ´on diferencial de Bernoulli correspondiente a la ecuaci ´on estu-diada, Qin y Fan [1].
a0(θ)
d2δ 2(θ)
dθ2 +a1(θ)
dδ2(θ)
dθ +b(θ)δ
m
2 (θ) = 0 (3.1)
donde a0,1(θ)y b(θ)son funciones continuas conocidas, y m += 0 es una constante. Podemos encontrar una soluci ´on, la cual satisfaga la siguiente ecuaci ´on diferencial de Bernoulli
dδ2
dθ =a(θ)δ
α
2 +c(θ)δ2 (3.2)
dondea(θ)yc(θ)son funciones continuas no conocidas y αes una cons-tante a determinar. Sustituyendo la Ec.(3.2) en la Ec.(3.1), obtenemos la siguiente ecuaci ´on
αa0(θ)a2(θ)δ22α−1+b(θ)δ2m+
[a0(a′(θ) + (α+ 1)a(θ)c(θ)) +a1(θ)a(θ)]δ2α+ 0
a0 !
c′(θ) +c2(θ)"
+a1(θ)c(θ) 1
δ2 = 0 (3.3)
Considerando que el exponente m = 2α −1en el primer t´ermino de la Ec. (3.3), entonces el primer y segundo t´ermino del lado izquierdo de la ecuaci ´on anterior pueden ser agrupados. Adicionalmente, igualando los coeficientes resultantes con cero, obtenemos el siguiente conjunto de ecua-ciones m+1
2 a0(θ)a
2(θ) +b(θ) = 0
a0 !
a′(θ) + m+3
2 a(θ)c(θ) "
+a1(θ)a(θ) = 0
a0(c′(θ) +c2(θ)) +a1(θ)c(θ) = 0
(3.4)
Una comparaci ´on simple entre la Ec. (2.22) y (3.1), nos permite escribir que
a0(θ) =
κ22(1 +µcosθ)
(1−cosθ)2 , a1(θ) =−
κ22(1 +µ) sinθ
(1−cosθ)3 , b(θ) = 1 y m= 1.
Sustituyendo las anteriores relaciones en la Ec. (3.4) y resolviendo para el coeficiente variablea(θ)yc(θ), obtenemos que
a(θ) = ± i
κ2
(1−cosθ)
√
1 +µcosθ (3.6)
y
c(θ) = µsinθ
4 (1 +µcosθ) (3.7)
Ahora, sustituyendo la Ec. (3.6) y (3.7) en la Ec. (3.2), obtenemos la siguiente ecuaci ´on diferencial de Bernoulli
dδ2
dθ =
2
± i
κ2
(1−cosθ)
√
1 +µcosθ +
µsinθ 4 (1 +µcosθ)
3
δ2 (3.8)
Resolviendo la Ec. (3.8), obtenemos f´acilmente una soluci ´on anal´ıtica paraδ2, la cual est´a expresada como
δ2 =
1 (1 +µcosθ)14
!
C1ei
Θ
+C2e−i
Θ"
(3.9)
dondeΘest´a definida por
Θ= 2√1+µ
µκ2
*
F #θ
2, 2µ µ+1
$
−E#θ
2, 2µ µ+1
$+
En la Ec. (3.9),F yEson integrales el´ıpticas de primer y segunda espe-cie, respectivamente, definidas como, Zwillinger [30],
F #θ
2, 2µ
1+µ
$
=)θ/2 0
dϕ
!
1−(1+2µµ)
2 sin2ϕ
E#θ
2, 2µ
1+µ
$
=)θ/2 0
4
1−#1+2µµ$2sin2ϕdϕ
3.2.
Condiciones de frontera
Para obtener los valores de los coeficientesC1,C2,βRyβT, requerimos
de dos condiciones de frontera adicionales, las cuales pueden obtenerse de la continuidad de la masa en la interfaces de las regionesR1-R2 enθ=π/2 yR2-R3enθ=θL.
En la posici ´on χ2 = 0 y en θ = π/2, la versi ´on adimensional de la condici ´on de frontera de acoplamiento se expresa como
dδ1
dχ1 5 5 5 5χ
1=0
= κ2
1−cosθ dδ2
dθ 5 5 5 5θ =π 2 (3.10)
y paraθ =θLyχ3 =k3L, tenemos
ε1/2κ 2
1−cosθ dδ2
dθ 5 5 5 5 θL
= dδ3
dχ3 5 5 5 5
χ3=k3L
(3.11)
De la Ecs. (2.23), (2.24), (3.9), (3.10) y (3.11), podemos obtener f´acilmen-te el siguienf´acilmen-te sisf´acilmen-tema de ecuaciones
−1 eiφ e−iφ 0
1 eiφ(1
−Ωi) −e−iφ(1 +Ωi) 0
0 eiΦ
ξ e−iΦ
ξ −eiα
0 eiΦ
(ξ−ψi) −e−iΦ
(ξ+ψi) −eiα
βR C1 C2 βT = 1 1 0 0 (3.12) donde
α= ωL
(gh3)1/2,
Ω= µκ2
4 , ξ =
1
(1+µcosθL)1/4, ψ =
κ2µsinθL
4(1+µcosθL)3/4(1−cosθL),
φ= 2√µ1+κ µ
2
*
F #π
4, 2µ
1+µ
$
−E#π
4, 2µ
1+µ
$+
y
Φ= 2√1+µ
µκ2
*
F #θL
2 , 2µ
1+µ
$
−E#θL
2 , 2µ
1+µ
Por lo tanto, la soluci ´on al sistema de ecuaciones Ec. (3.12) est´a dado por
βR =
e2iφΩ(ψ
−2iξ) +e2iΦ
ψ(−Ω+ 2i)
Λ (3.13)
βT = −
4ei(φ+Φ−α)ξ2
Λ (3.14)
C1 = −
2eiφ(2ξ+iψ)
Λ (3.15)
C2 =
2iei(φ+2Φ)ψ
Λ (3.16)
conΛ=e2iφ(
−4ξ−ψΩ+ 2i(−ψ+ξΩ)) +e2iΦ
ψΩ
3.3.
Coeficientes de reflexi ´on y transmisi ´on
En este cap´ıtulo se definen los coeficientes de reflexi ´onCR y
transmi-si ´onCT, que desde un punto de vista f´ısico, ´estos representan el porcentaje
de energ´ıa reflejada y transmitida, como consecuencia de las variaciones de la profundidad en la zona de propagaci ´on, la suma de ambos debe corresponder a la energ´ıa total del oleaje incidente, Dean [31]. La impor-tancia de estos coeficientes radica en que permiten cuantificar la amplitud del oleaje que se refleja y transmite. Por lo tanto, en la pr´actica es posi-ble manipular y obtener alturas de oleaje que permitan en una primera aproximaci ´on dise ˜nar estructuras rompeolas, eficientes y seguras.
Mediante un balance del flujo de energ´ıa entre las regionesR1 −R2 y
R2−R3, obtenemos la expresi ´on siguiente
FI =FR+FT (3.17)
dondeFI,FRyFT son los flujos promedio de energ´ıa incidente, reflejada
FI =EIc1n1, FR =ERc1n1 y FT =ETc3n3 (3.18)
y EI, ER y ET son las energ´ıas promedio por unidad de superficie
inci-dente, reflejada y transmitida, respectivamente; los productos c1n1 yc3n3 expresan la velocidad a la cual la energ´ıa se propaga en la regiones R1 y
R3, respectivamente. Sustituyendo las expresiones de la Ec. (3.18) en la Ec. (3.17), obtenemos
EIc1n1 =ERc1n1+ETc3n3 (3.19)
con EI = ρgAI2/2, ER = ρgAR2/2 y ET = ρgAT2/2. En ondas largas no
dispersivas, las velocidades de fase est´an dadas por c1 = √gh1 y c3 =
√
gh3. Por otro lado, para condiciones de flujo somero el factor ntiene un valor de1.
Tomando en cuenta las relaciones anteriores, la Ec. (3.19) se escribe co-mo
1 2ρgA
2
I =
1 2ρgA
2 R+ √ gh3 √ gh1 1 2ρgA
2
T, (3.20)
ordenando la expresi ´on anterior, se obtiene
<
AR
AI
=2
+ε1/2
<
AT
AI
=2
= 1 (3.21)
Los t´erminos del lado izquierdo de la Ec. (3.21), representan el porcen-taje de energ´ıa reflejada y transmitida, respectivamente. Estos valores son siempre cantidades positivas, por lo cual la Ec. (3.21) puede definirse en t´erminos de valores absolutos
5 5 5 5 AR AI 5 5 5 5 2
+ε1/2
5 5 5 5 AT AI 5 5 5 5 2
= 1 (3.22)
La Ec. (3.22) en forma simplificada, se escribe en la forma siguiente
dondeCRyCT son los coeficientes de reflexi ´on y transmisi ´on,
respectiva-mente, dados por
CR=
5 5 5 5 AR AI 5 5 5 5 (3.24) y
CT =
5 5 5 5 AT AI 5 5 5 5 (3.25)
Sustituyendo los valores deβR =AR/AI y βT = AT/AI dados por las
Ecs. (3.13) y (3.14), respectivamente, en las Ecs. (3.24) y (3.25); los coeficien-tes de reflexi ´on y transmisi ´on se reescriben de la forma siguiente
CR=
5 5 5 5
e2iφΩ(ψ
−2iξ) +e2iΦ
ψ(−Ω+ 2i) Λ 5 5 5 5 (3.26)
CT =
5 5 5 5
−4ei(φ+Φ−α)ξ2
Cap´ıtulo 4
An´alisis de resultados
Con la finalidad de estudiar el efecto geom´etrico del rompeolas cicloi-dal en la reflexi ´on, transmisi ´on y deformaci ´on de la superficie libre para ondas largas lineales, se utilizan las siguientes variables f´ısicas: el radio del c´ırculo generador del arco de cicloide y la profundidad son r = 0.6
m y h1 = 0.9 m, respectivamente; el periodo del oleaje es T = 8 s y el n ´umero de onda en la regi ´onR1 esk = 0.264 m−1, [8]. Adicionalmente, se proponen tres valores m´as parar(= 0.2,0.3,0.4)m y los siguientes valores para la longitud de ondaλ(= 30,35,40)m; la profundidadh3se calcula a partir de la Ec. (2.4). De los valores mencionados, obtenemos el par´ametro adimensional de profundidades µ(= 0.33,0.44,0.55,0.66) y el par´ametro cinem´aticoκ2(= 6.3,7.95,9.28,10.6).
4.1.
Cicloide
Para este caso particular, el rompeolas cicloidal est´a delimitado en el intervalo π/2 ≤ θ ≤ 3π/2, generando profundidades id´enticas en las re-giones R1 y R3 (h1 =h3). En particular, en este caso, considerando que
θL = 3π/2, los coeficientes de reflexi ´on y transmisi ´on dados por Ecs. (3.26)
CR=
5 5 5 5 5
Ω0
e2iφ(Ω+ 2i) +e2iΦ
(−Ω+ 2i)1
e2iφ(2i+Ω)2−e2iΦΩ2
5 5 5 5 5
(4.1)
y
CT =
5 5 5 5
4ei(φ+Φ−α)
e2iφ(2i+Ω)2−e2iΦΩ2
5 5 5 5
[image:43.595.160.484.136.494.2](4.2)
Figura 4.1. Caso 1. Coeficiente de reflexi ´onCR y transmisi ´onCT en funci ´on del
par´ametro adimensional relativo de profundidadesµ para valores distintos del par´ametro cinem´aticoκ2.
Los valores de los coeficientes CR y CT, obtenidos en t´erminos del
estructura es altamente reflejante, esta condici ´on puede presentarse para valores peque ˜nos de la frecuencia del oleaje ω y para valores fijos de la profundidadh1 y el radior.
La Fig. 4.2 muestra los coeficientes de reflexi ´on y transmisi ´on en fun-ci ´on del par´ametro fun-cinem´atico adimensionalκ2y cuatro valores diferentes del par´ametro de profundidades µ(= 0.33,0.44,0.55,0.66). Como se ob-serva en la Fig. 4.1, las curvas del coeficiente de reflexi ´on CR para ciertos
valores peque ˜nos deκ2 obligan a disminuir la reflexi ´on hasta alcanzar un m´ınimo, aunque despu´es los valores de los coeficientes de reflexi ´onCR
[image:44.595.161.448.349.583.2]au-mentan para los distintos valores del par´ametroµ. Lo anterior es debido a la influencia de la frecuencia ωen la reflexi ´on de la energ´ıa del oleaje que cuanto m´as peque ˜na es su magnitud, mayor ser´a la reflexi ´on.
Figura 4.2. Caso 1. Coeficiente de reflexi ´onCR y transmisi ´onCT en funci ´on del par´ametro adimensional cinem´aticoκ2para valores distintos del par´ametroµ..
particu-lar se presenta a continuaci ´on. Una vez evaluadas las constantes C1 yC2 cuando θL = 3π/2, se sustituyen en la Ec. (3.9) y se obtiene la siguiente
expresi ´on
δ2 = −
2ei(φ+Θ)!
2 +iΩ!e2i(Φ−Θ)
−1""
(1 +µcosθ)14 !e2iφ(2i+Ω)2−e2iΦΩ2"
[image:45.595.162.452.188.489.2]. (4.3)
Figura 4.3. Caso 1. Amplitud adimensional de las ondas largas en funci ´on del par´ametro adimensionalθ, con unµ= 0.66para valores distintos del par´ametro
cinem´aticoκ2.
Los efectos del par´ametro cinem´aticoκ2, en la deformaci ´on de la ele-vaci ´on de la superficie libre se muestran en la Fig. 4.3. En esta figura los valores de δ2 se muestran para valores diferentes del par´ametro κ2
Figura 4.4. Caso 1. Amplitud adimensional de las ondas largas en funci ´on del par´ametro adimensionalθ, con unκ2 = 6.3para valores distintos del par´ametro
µ.
La Fig. 4.4 muestra la elevaci ´on adimensional de la superficie de las ondas largas, en funci ´on del par´ametro adimensionalθ, para cuatro dife-rentes valores de µ(= 0.33,0.44,0.55,0.66) y el par´ametro adimensional
κ2 = 6.3. Esta gr´afica demuestra la influencia del par´ametro µ en la ele-vaci ´on de la superficie libre. Cuando µes relativamente grande, debido a quer →h1, la amplitud del oleaje crece fuertemente como se observa con
µ = 0.66. De manera contraria, cuando µ es peque ˜no, la amplitud de la onda decrece y su comportamiento tiende a ser lineal. Esto ´ultimo puede observarse a partir de las Ecs. (4.1) y (4.2). Para el l´ımite de µ → 0 la re-laci ´onΩ ≈ 0y el denominador de las expresiones mencionadas es ≈ −4;
4.2.
Semi-cicloide
Para este caso, el rompeolas cicloidal se encuentra delimitado en el in-tervalo π/2 ≤ θ ≤ π, la profundidad en la regi ´on R3 es h3 = h1 − r. Evaluando en θL = π, se obtienen ξ = ε−1/4 y ψ = 0; los coeficientes de
reflexi ´onCRy transmisi ´onCT en una forma simplificada se expresan en la
forma siguiente
CR=
Ω
√
4 +Ω2 (4.4)
CT =
2ξ
√
4 +Ω2 (4.5)
En la Fig. 4.5 se muestran los efectos del par´ametroµen los coeficien-tes CR yCT, para cuatro valores del par´ametro cinem´atico κ2 (= 6.3, 7.95, 9.28, 10.6). En general, los resultados indican que para valores deµ→1la estructura es altamente reflejante; por ejemplo, para un valor de µ = 0.8
y κ2 = 10.6, el valor del coeficiente de reflexi ´on es CR = 0.72, esto
de-muestra la relevancia del par´ametro µen la reflexi ´on del oleaje. Por otro lado, en la parte superior de la misma figura se presentan los valores del coeficiente de transmisi ´on CT, estos resultados ilustran que para valores
de κ2 ∼ O(1), la amplitud del oleaje es fuertemente amplificada, lo cual puede verificarse si comparamos el coeficienteCT para un valor deµ= 0.8
y dos valores del par´ametro κ2(= 6.3y10.6), los coeficientes de transmi-si ´on son CT (= 1.25y1.02), respectivamente, estos valores muestran que
el primer caso es 23 %m´as reflejante que el segundo. Adicionalmente, los resultados mencionados indican que para valores diferentes de la frecuen-cia del oleaje, la configuraci ´on semi-cicloidal es fuertemente reflejante para valores deκ2 ∼O(1).
Figura 4.5. Caso 2. Coeficiente de reflexi ´onCR y transmisi ´onCT en funci ´on del
par´ametro adimensional relativo de profundidadesµ para valores distintos del par´ametro cinem´aticoκ2.
oleaje de dos maneras distintas; la primera es el aumento de la magnitud deµque conlleva un incremento del radiorsobre la profundidad enh1; la segunda es el aumento en la reflexi ´on que se genera cuando la frecuencia del oleajeωdisminuye y crece el par´ametro cinem´aticoκ2.
Como caso part´ıcular, cuando µ → 0 el par´ametro Ω → 0 y ξ = 1;
por lo tanto, las Ecs. (4.4) y (4.5) recuperan el caso cuando la influencia de la estrutura es pr´acticamente inexistente en el flujo del oleaje, que en los coeficientes se refleja conCR≈0yCT ≈1.
Figura 4.6. Caso 2. Coeficiente de reflexi ´onCR y transmisi ´onCT en funci ´on del par´ametro adimensional cinem´aticoκ2para valores distintos del par´ametroµ.
δ2 =
2iei(Θ−φ)
(2i+Ω) (1 +µcosθ)14
. (4.6)
La Fig. 4.7 muestra la elevaci ´on adimensional de la superficie libre pa-ra cuatro valores diferentes del par´ametro κ2(= 6.3,7.95,9.28,10.6) y un valor constante de µ = 0.66. Se observa que conforme κ2 disminuye, la deformaci ´on del oleaje es menor. Adem´as, un valor menor que µ = 0.66
producir´a menor reflexi ´on y a medida que la frecuenciaωaumente, la ele-vaci ´on del oleaje ser´a menormente deformada y tender´a a una amplitud
δ2 aproximadamente de uno.
Figura 4.7. Caso 2. Amplitud adimensional de las ondas largas en funci ´on del par´ametro adimensionalθ, con unµ= 0.66para valores distintos del par´ametro
cinem´aticoκ2.
θ =π, presenta un decremento significativo en su magnitud, siempre que
µ → 1. Ahora, comparando las alturas de δ2 en la posici ´on θ = π, para valores de µ = 0.33 contra µ = 0.66, puede notarse que existe una dife-rencia del23 %. Adem´as, en la misma figura se aprecia que la altura de la elevaci ´on adimensional de la superficie libre es menormente deformada siempre queµ → 0y para esto la elevaci ´on de la superficie libre tiene un valor deδ2 →1.
4.3.
Cicloide generalizado
Figura 4.8. Caso 2. Amplitud adimensional de las ondas largas en funci ´on del par´ametro adimensionalθ, con unκ2 = 6.3para valores distintos del par´ametro
µ.
conh3 > h1. EvaluandoθL= 7π/4, se obtienen los coeficientes de reflexi ´on
y transmisi ´on particulares para este caso.
Para el presente caso, los coeficientes de reflexi ´on y transmisi ´on co-mo funci ´on del par´ametro adimensional µ y con valores distintos de κ2
(= 6.3,7.95,9.28,10.6)son mostrados en la Fig. 4.9. En esta figura, se pue-de notar que el coeficienteCT → 1yCR → 0siempre queµ→ 0, adem´as
muestran que el coeficienteCT presenta un decremento prominente
cuan-doµ → 1. En la misma figura, se aprecia que paraµ = 0.85, el valor m´as peque ˜no deCT se presenta paraκ2 = 10.6y este valor esCT = 0.4, as´ı
Figura 4.9. Caso 3. Coeficiente de reflexi ´onCR y transmisi ´onCT en funci ´on del
par´ametro adimensional relativo de profundidadesµ para valores distintos del par´ametro cinem´aticoκ2.
La Fig. 4.10 muestra los coeficientes de reflexi ´on y transmisi ´on en fun-ci ´on del par´ametro fun-cinem´atico adimensionalκ2y cuatro valores diferentes del par´ametro de profundidades µ(= 0.33,0.44,0.55,0.66). Al igual que en la Fig. 4.9, las curvas del coeficiente de reflexi ´on CR presentan un
au-mento en su magnitud cuando µ crece. Se observa que para valores de
µ(= 0.33,0.44,0.55), el aumento del par´ametro cinem´atico κ2 es propor-cional al aumento en el coeficiente de reflexi ´on CR. Mientras que en las
curvas mencionadas el aumento del coeficiente de reflexi ´on es notorio, en el caso deµ= 0.66sucede de manera inversa, se observa que enκ2 = 5el coeficiente de reflexi ´on CR = 0.61y al final, enκ2 = 13, el coeficiente de reflexi ´onCRdisminuy ´o a0.52
ma-Figura 4.10. Caso 3. Coeficiente de reflexi ´onCRy transmisi ´onCT en funci ´on del par´ametro adimensional cinem´aticoκ2para valores distintos del par´ametroµ.
nera general la elevaci ´on de la superficie libre es la Ec. (3.9). Evaluando al ecuaci ´on mencionada y los coeficientesC1yC2, Ecs. (3.15)-(3.16), respecti-vamente, con θL = 7π/4, se obtiene la ecuaci ´on que describe la elevaci ´on
adimensional de la superficie libre para el presente caso.
La Fig. 4.11 muestra la elevaci ´on adimensional de la superficie en fun-ci ´on de θ, al pasar sobre la estructura cuandoµ = 0.66y cuatro distintos valores de κ2(= 6.3,7.95,9.28,10.6). La gr´afica muestra la semajanza en la amplitud en la superficie libre adimensional cuando µ = 0.66para los distintos valores deκ2que se presentan. La amortiguaci ´on de la superficie libre es grande cuando se alcanza el valorθL= 7π/4. La figura demuestra
[image:53.595.163.448.125.365.2]Figura 4.11. Caso 3. Amplitud adimensional de las ondas largas en funci ´on del par´ametro adimensionalθ, con unµ= 0.66para valores distintos del par´ametro
cinem´aticoκ2.
1.47y1.53, mientras que al final enθL= 7π/4los valores est´an dentro del
rangoδ2 ≈ −0.68yδ2 ≈ −0.69.
En la Fig. 4.12 es mostrada la elevaci ´on adimensional de la superficie libre como una funci ´on del ejeθpara cuatro valores del par´ametro de pro-fundidadesµ(= 0.33,0.44,0.55,0.66)y un valor constanteκ2 = 6.3. En esta figura, se observa que la amplitud del oleaje decrece siempre queθ →θL,
i.e. para el caso de µ = 0.66en la posici ´on θL = 7π/4, la elevaci ´on de la
Figura 4.12. Caso 3. Amplitud adimensional de las ondas largas en funci ´on del par´ametro adimensionalθ, con unκ2 = 6.3para valores distintos del par´ametro
Conclusiones
Con base en la busqueda de una ecuaci ´on difencial de Bernoulli corres-pondiente al Problema de Valores en la Frontera estudiado, se deriva una soluci ´on anal´ıtica para oleaje largo lineal propag´andose sobre un rompeo-las sumergido, el cual obedece una distribuci ´on cicloidal. En el presente estudio, se analizan tres diferentes configuraciones geom´etricas del rom-peolas cicloidal y se presentan f ´ormulas sencillas para la elevaci ´on adi-mensional de la superficie libre,δ2, junto con los coeficientes de reflexi ´on,
CR, y transmisi ´on, CT. Con la finalidad de validar el modelo, cada uno
de los casos particulares demostr ´o la conservaci ´on de la energ´ıa a partir de la expresi ´on que define el flujo energ´ıa en aguas someras para ondas largas. Los resultados muestran que el rompeolas sumergido cicloidal es una buena alternativa para el amortiguamiento de oleaje largo lineal y las f ´ormulas obtenidas para los coeficientes de reflexi ´on y transmisi ´on cons-tituyen una referencia para aplicaciones ingenieriles, i.e.si consideramos para los tres casos analizados un valor deκ2 = 6.3yµ= 0.85, los coeficien-tes de transmisi ´on paraθL = 3π/2,πy7π/4sonCT = 0.805,1.335y0.445,
respectivamente; como se puede notar, el caso de θL = 7π/4 presenta el
menor valor en el coeficiente de transmisi ´on y, por lo tanto, esta condici ´on puede representar una buena alternativa para la reducci ´on en la energ´ıa del oleaje transmitido.
Bibliograf´ıa
[1] M. Qin and G. Fan. An effective method for finding special solutions of nonlinear differential equations with variable coefficients. Physics
Letters A, 372:3240–3242, 2008.
[2] W. Guo, C. Jian, and Y. Shuwang. Effect of subgrade soil stiffness on the design of geosynthetic tube.Geotextiles and Geomembranes, 29:227– 284, 2011.
[3] M. Ahmed and R. Anwar. Experimental study on the performance of submerged breakwater as shore protection structure. International
Conference on Environment and BioScience, 21:156–160, 2011.
[4] H. Hanson, A. Brampton, M. Capobianco, H. H. Dette, L. Hamm, C. Laustrup, A. Lechuga, and R. Spanhoff. Beach nourishment pro-jects, practices, and objectives; a european overview. Coastal Enginee-ring, 47:81–111, 2002.
[5] T. H. Junga, K. D. Suh, S. O. Lee, and Y. S. Cho. Linear wave reflection by trench with various shapes.Ocean Engineering, 35:1226–1234, 2008.
[6] C. Sheehan and J. Harrington. An environmental and economic analysis for geotube coastal structures retaining dredge material.
[7] M. Christou, C. Swan, and O. T. Gudmestad. The interaction of sur-face water waves with submerged breakwaters. Coastal Engineering, 55:945–958, 2008.
[8] E. Alvarez, R. Rubio, and H. Ricalde. Beach restoration with geotex-tile tubes as submerged breakwaters in yucatan, mexico. Geotextiles
and Geomembranes, 25:233–241, 2007.
[9] H. Lamb. Hydrodynamics, sixth Ed. Cambridge University Press, 1932.
[10] H. Kreiss. Some remarks about non linear oscillations in tidal chan-nels. Tellus, 9:53–68, 1957.
[11] B. S. Gallagher and W. H. Munk. Tides in shallow water: spectros-copy. Tellus, 23(4-5):346–363, 1971.
[12] D. G. Aubrey and P.E. Speer. A study of non-linear tidal propagation in shallow inlet/estuarine systems, part i: Observations. Estuarine,
Coastal and Shelf Science, 21:185–205, 1985.
[13] P. E. Speer and D. G. Aubrey. A study of nonlinear tidal propagation in shallow inlet/estuarine systems, part ii: Theory. Estuarine, Coastal
and Shelf Science, 21:207–224, 1985.
[14] A. Ouahsine and P. A. Bois. Mathematical modelling of long ocean waves with a discontinuous density gradient. J. Eng. Math., 40:141– 158, 2001.
[15] J. L. Mead. The shallow water equation in lagrangian coordinates. J.
Comput. Phys., 200:654–669, 2004.
[17] R. Camassa, J. Huang, and L. Lee. Integral an integrable algo-rithms for a nonlinear shallow-water wave equation.J. Comput. Phys., 216:547–572, 2006.
[18] T. J. Ohare and A. G. L. Davies. A new model for surface wave propa-gation over undulating topography. Coastal Engineering, 18:251–266, 1992.
[19] R. Silva, I. J. Losada, and M. A. Losada. Reflection and transmission of tsunami waves by coastal structures. Applied Ocean Research, 22:215– 223, 2000.
[20] C. J. Bender and R. G. Dean. Wave transformation by two-dimensional bathymetric anomalies with sloped transitions. Coastal
Engineering, 50:61–84, 2003.
[21] Y. Li, G. Dong., H. Liu, and D. Sun. The reflection of oblique incident waves by breakwater with double-layered perforated wall. Coastal
Engineering, 50:47–60, 2003.
[22] P. Lin. A numerical study of solitary wave interaction with rectangu-lar obstacles. Coastal Engineering, 51:35–51, 2004.
[23] H. K. Chang and J. C. Liou. Long wave reflection from submerged trapezoidal breakwaters. Coastal Engineering, 34:185–191, 2005.
[24] I. I. Didenkulova, N. Zahibo, and E. N. Pelinovsky. Reflection of long waves from a nonreflecting bottom profile. J. Fluid Dynamics, pages 22–29, 2002.
[26] J. Recio and H. Oumeraci. Processes affecting the hydraulic stability of coastal revetments made of geotextile sand containers. Coastal
En-gineering, 56(3):260–284, 2009.
[27] K Tang. Mathematical Methods for Engineers and Scientists 3, 1 edn. Springer, 2007.
[28] Ib. A Svendsen. Introduction to nearshore hydrodynamics. Wold Scienti-fic, Singapore, 2006.
[29] R. G. Dean and R. A. Dalrymple. Water wave mechanics for engineers
and scientists, vol. 2. World Scientific, Singapore, 1984.
[30] Zwillinger D. Standar mathematical tables and formulae. Taylor Francis Group, 2012.
[31] R. G. Dean and R. A. Dalrymple. Water wave mechanics for engineers
Ap´endice A
Teor´ıa de ondas largas
Las velocidades y el perfil de la superficie libre para una onda progre-siva est´an descritos por las siguientes ecuaciones
u= H 2
gk ω
coshk(h+z)
cosh(kh) cos(kx−ωt) (A.1)
w= H 2
gk ω
sinhk(h+z)
cosh(kh) sin(kx−ωt) (A.2)
ζ = H
2 cos(kx−ωt) (A.3)
dondeurepresenta la componente de velocidad de las part´ıculas del agua en direcci ´on horizontal;w la componente en direcci ´on vertical;ζ el perfil de la superficie libre del oleaje. ρ, g, ω, h, z y t describen la densidad del agua, la gravedad, la frecuencia radial del oleaje, la profundidad del mar, el eje vertical y el tiempo, respectivamente;H es la altura de la onda;
kes el n ´umero de onda dado por2π/λ.
Usando las formas asint ´oticas en aguas someras de las funciones hi-perb ´olicas, podemos llegar a las ecuaciones que describen la velocidad de una part´ıcula de agua en condici ´on de ondas largas,k h(π/10.
us=
H
2
gk
ω cos(kx−ωt) =
ζC
dondec=√ghes la celeridad de la onda. El sub´ındicesdenota que es en condiciones de aguas someras. Como puede observarse, us no es funci ´on
de la elevaci ´on; la velocidad horizontal es uniforme a trav´es de la profun-didad. La velocidad vertical de una part´ıcula de agua est´a dada por
ws=
H
2
gk
ω [k(h+z)] sin (kx−ωt) = H
2
C h (kh)
#
1 + z
h
$
sin (kx−ωt) =
−C#1 + z
h
$∂ζ
∂x (A.5)
La velocidad vertical var´ıa linealmente con la profundidad desde cero en el fondo hasta un m´aximo en la superficie y es mucho m´as peque ˜na en magnitud queus. La proporci ´on de sus m´aximos valores es
(u)sm´ax (w)sm´ax =
1
kh (A.6)
dondekhes un valor peque ˜no. La presi ´on bajo ondas largas es
p=−ρgz+ρgH 2
coshk(h+z)
cosh(kh) cos(kx−ωt) (A.7)
Sustituyendo la Ec. (A.3) para reducir, obtenemos
p=−ρgz+ζρg 2
coshk(h+z)
cosh(kh) (A.8)
Considerando la relaci ´on de la Ec. (A.6) la expresi ´on anterior se simpli-fica, entonces se obtiene
p=ρg(ζ−z) (A.9)
A.1.
Ecuaci ´on de continuidad
La ecuaci ´on tridimensional de conservaci ´on de la masa para un flujo incompresible es
∂u
∂x +
∂v
∂y +
∂w
∂z = 0 (A.10)
Integrando a trav´es de la profundidad, obtenemos
> ζ
−h
<
∂u
∂x +
∂v
∂y +
∂w ∂z = dz = > ζ −h ∂u
∂xdz+
> ζ
−h
∂v
∂ydz+w(x, y,ζ)−w(x, y,−h) = 0 (A.11)
La regla de Leibniz de integraci ´on es usada para integrar los primeros dos t´erminos del lado derecho de la expresi ´on. En general, se afirma como
∂ ∂x
> β(x)
α(x)
Q(x, y)dy=
> β(x)
α(x)
∂
∂xQ(x, y)dy+Q(x,β(x)) ∂β(x)
∂x −Q(x,α(x)) ∂α(x)
∂x (A.12)
Los l´ımites de la integral son constantes en relaci ´on a la variable de integraci ´on, el operador diferencial puede ser desplazado dentro o fuera de la integral sin generar t´erminos adicionales. Por lo tanto, la ecuaci ´on de continuidad integrada es reescrita como
∂ ∂x
> ζ
−h
udz−u(x, y,ζ)∂ζ
∂x−u(x, y,−h) ∂h
∂x+
w(x, y,ζ)−w(x, y,−h) + ∂ ∂y
> ζ
−h
vdz−
v(x, y,ζ)∂ζ
∂y −v(x, y,−h) ∂h
∂y = 0 (A.13)
U = 1
h+ζ
)ζ
−hudz y V =
1
h+ζ
)ζ −hvdz
Lo cual es usando la definici ´on matem´atica de promedio (de este modo incorporando cualquier posible variaci ´on vertical en la velocidad horizon-tal) o si asumimos queuyvson constantes a trav´es de la profundidad, la ecuaci ´on de continuidad puede ser escrita como
∂
∂x[U(h+ζ)] + ∂
∂y[V (h+ζ)]−v(x, y,ζ) ∂ζ
∂y −v(x, y,−h) ∂h ∂y
−u(x, y,ζ)∂ζ
∂x −u(x, y,−h) ∂h
∂x +w(x, y,ζ)−w(x, y,−h) = 0 (A.14)
Una mayor simplificaci ´on resultar´a mediante el uso de condiciones de frontera. La condici ´on de frontera cinem´atica de la superficie libre en tres dimensiones es
∂ζ
∂t +u(x, y,ζ) ∂ζ
∂x+v(x, y,ζ) ∂ζ
∂y =w(x, y,ζ) (A.15)
La condici ´on de frontera del fondo para una superficie fija (en el tiem-po) es
w(x, y,−h) = −u(x, y,−h)∂h
∂x −v(x, y,−h) ∂h
∂y (A.16)
Sustituyendo estas condiciones dentro de la ecuaci ´on de continuidad integrada verticalmente, y reduciendo t´erminos, se obtiene la forma final de la ecuaci ´on de continuidad
∂[U(h+ζ)]
∂x +
∂[V (h+ζ)]
∂y =−
∂ζ
∂t (A.17)