INTERFAZ DE COMUNICACIÓN ENTRE UNA
ESTACIÓN DE MONITOREO Y UNA ESTACIÓN
CENTRAL DE GNSS
T E S I S
QUE PARA OBTENER EL TÍTULO DE INGENIERO EN
COMUNICACIONES Y ELECTRÓNICA
PRESENTA
MARTIN GÓMEZ VARELA
DIRECTORES
M. EN C. MIGUEL SÁNCHEZ MERAZ M. EN C. FABIOLA MARTINEZ ZUÑIGA
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y
ELÉCTRICA
UNIDAD ZACATENCO
La vida a cada instante presenta nuevos obstáculos y retos que forjan a cada persona, es por eso que todos requerimos de adquirir siempre nuevos conocimientos para ser capaces de enfrentar la vida, sea de manera personal o profesional.
En este trabajo, quiero agradecer a todas aquellas personas que me han apoyado en el recorrer de este camino, MIS PADRES, Diego Gómez y Paula Varela, que siempre confiaron en mí, me acompañaron y más aun, hicieron posible que yo pudiera comenzar y finalizar mis estudios superiores.
Agradezco también a mis hermanos, Elias, Laura y Alejandra, que han puesto en mí siempre su confianza y me han alentado a siempre seguir adelante.
Contenido
Objetivo ... VIII Justificación ... IX Hipótesis... X Introducción ... XI
Capítulo 1 ... 1
Sistema Global de Navegación por Satélite ... 1
1.1 Posicionamiento ... 2
1.2 Arquitectura de GNSS ... 3
1.2.1 Segmento espacial ... 4
1.2.2 Segmento de control o segmento en Tierra ... 4
1.2.3 Segmento de usuario ... 5
1.3 Sistemas que componen GNSS ... 5
1.3.1 Sistema de Posicionamiento Global (GPS) ... 5
1.3.2 GLONASS ... 7
1.3.3 Galileo ... 7
1.3.4 Sistemas Regionales ... 9
1.4 Aplicación de GNSS ... 10
1.5 Proyecto GNSS ... 11
1.5.1 Receptor ... 12
1.5.2 Manejo de efemérides ... 12
1.5.3 Interfaz de envío... 12
1.5.4 Estación central ... 12
1.5.5 Estación de enlace o de subida ... 12
Capítulo 2 ... 13
Sistema de monitoreo GNSS ... 13
2.1 Arquitectura del proyecto GNSS ... 14
2.1.1 Estaciones de monitoreo ... 14
2.1.2 Estación central ... 15
2.2 Enfoque de proyecto ... 16
2.3 GNSS en México ... 16
2.3 Sistema de monitoreo del desempeño GNSS ... 17
2.3.1 Monitoreo de GPS ... 17
2.3.1 Monitoreo de GLONASS ... 19
2.4 Principios de adquisición de datos ... 19
2.4.1 Comparación de Dispositivos ... 20
2.5 Sistema seleccionado: MSP430-EasyWeb2 ... 24
2.5.1 Principio de funcionamiento ... 25
Capítulo 3 ... 27
Elementos para el desarrollo del sistema ... 27
3.2 Sistema EasyWeb 2 ... 29
3.2.1 Descripción de elementos ... 30
3.3 Herramienta de programación ... 34
3.4 Pruebas de reconocimiento ... 36
Capítulo 4 ... 38
Desarrollo de interfaz de comunicación ... 38
4.1 Recepción de tramas NMEA ... 39
4.1.1 Interconexión GPS-EasyWeb 2 ... 39
4.1.2 Configuración de USART ... 40
4.2 Lectura de tramas NMEA ... 43
4.3 Interconexión a la red IP ... 44
4.3.1 Driver cs8900.c ... 45
4.3.2 Stack TCP/IP ... 45
4.4 Interfaz ... 46
4.5 Adaptación de tramas en un servidor HTTP ... 47
Capítulo 5 ... 48
Pruebas y Resultados ... 48
5.1 Materiales y equipo utilizado. ... 49
5.2 Configuración de la prueba ... 49
5.3 Pruebas y resultados ... 51
Conclusiones ... 55
Trabajos a futuro ... 55
Glosario ... 56
Referencias ... 58
Apéndices... 60
Apéndice A: Programas generados ... 60
Anexos ... 70
Anexo 1: Diagrma de flujo ... 70
Índice de Figuras
Capítulo 1 Sistema Global de Navegación por Satélite
Figura 1.1 Solución de posicionamiento ... 3
Figura 1.2 Arquitectura de un sistema GNSS [1] ... 4
Figura 1.3 Planos orbitales de satélites GPS ... 6
Figura 1.4 Planos orbitales de satélites GLONASS ... 7
Figura 1.5 Planos orbitales de satélites Galileo... 8
Figura 1.6 Zona de cobertura del sistema Beidou y Compass [17] ... 9
Figura 1.7 Órbita que describen los satélites QZSS [18] ... 10
Figura 1.8 Diagrama a Bloques del proyecto GNSS ... 11
Capítulo 2 Proyecto GNSS Figura 2.1 Diagrama a bloques de una estación de monitoreo ... 15
Figura 2.2 Interacción entre una estación de monitoreo y la estación central del sistema de monitoreo GNSS. ... 15
Figura 2.3 Tramas NMEA de un GPS comercial ... 18
Figura 2.4 Tramas NMEA de un receptor GNSS ... 19
Figura 2.5 Encapsulado del microcontrolador PIC32MX775F256H [4] ... 21
Figura 2.6 Microcontrolador ENC28J60 ... 22
Figura 2.7 Sistema embebido PIC-WEB ... 23
Figura 2.8 Sistema de desarrollo MSP430-easyWeb2 ... 24
Figura 2.9 Proceso de comunicación entre estación de monitoreo y estación central ... 25
Capítulo 3 Elementos para el desarrollo del sistema Figura 3.1 Receptor GPS eTrex Garmin ... 28
Figura 3.2 Tramas NMEA del receptor eTrex Garmin ... 29
Figura 3.3 Sistema EasyWeb 2 ... 29
Figura 3.4 Microcontrolador MSP430F149. [9] ... 31
Figura 3.5 Conexión de CS8900 y MSP430F149 ... 32
Figura 3.6 Conexión MAX232 – RS-232 ... 33
Figura 3.7 Puerto JTAG ... 34
Figura 3.8 Programador MSP430-JTAG-ISO Olimex Ltd. ... 34
Figura 3.9 Ventana de IAR Embedded Wrokbench en modo de programación. ... 35
Figura 3.10 Ventana de IAR Embedded Wrokbench en modo de depuración. ... 36
Capítulo 4 Desarrollo de interfaz de comunicación
Figura 4.1 Puertos serie tipo "hembra" ... 39
Figura 4.2 Conexión seria DB9 "macho-macho" ... 40
Figura 4.3 Registros de configuración de la UART [11]. ... 42
Figura 4.4 Contenido de arreglos "buf", "get" y "gll" ... 44
Figura 4.5 Latitud y Longitud en LCD ... 44
Capítulo 5 Pruebas y resultados Figura 5.1 Diagrama deconexión para pruebas ... 50
Figura 5.2 Configuración de dirección IP del equipo B. ... 50
Figura 5.3 Prueba con el comando “ping” a la dirección IP 192.168.10.12. ... 51
Figura 5.4 Ventana de visualización de la IP 192.168.10.12 ... 52
Figura 5.5 Esquema del sistema de monitoreo GNSS ... 53
Índice de tablas
Capítulo 1 Sistema Global de Navegación por Satélite
Tabla 1.1 Bloques de Satélites de GPS ... 6
Tabla 1.2 Generaciones de GLONASS ... 7
Capítulo 2 Proyecto GNSS Tabla 2.1 Visibilidad y disposición de sistemas en México ... 17
Tabla 2.2 Tramas NMEA de algunos receptores comerciales... 18
Tabla 2.3 Características del microcontrolador PIC18F67J60 ... 22
Tabla 2.4 Comparación entre sistemas PIC-WEB y MSP430-easyWeb2 ... 24
Capítulo 3 Elementos para el desarrollo del sistema Tabla 3.1 Configuración del eTrex Garmin ... 29
Tabla 3.2 Componentes del sistema EasyWeb 2 ... 30
Capítulo 4 Desarrollo de interfaz de comunicación Tabla 4.1 Descripción de pines puerto DB9 ... 40
Tabla 4.2 Configuración de registros UART ... 41
Tabla 4.3 Descripción de arreglos ... 43
Objetivo
Justificación
En el territorio mexicano se cuenta con cobertura de sistemas de navegación satelital como GPS y GLONASS. Actualmente este tipo de sistemas han extendido su uso de forma muy importante hacia diversas áreas de sector productivo y de servicios. Por tal motivo es importante para el desarrollo en las comunicaciones, que los servicios que otorgan estos sistemas puedan ser explotados de la mejor manera para apoyar diversas áreas laborales dentro de nuestro país. Con esta inquietud surge el proyecto de un sistema de monitoreo GNSS, con la intención de obtener la mayor cantidad posible de información proveniente de estos sistemas, depurarla y utilizarla con fines científicos y de apoyo a los sectores productivo y de servicios.
Hipótesis
El desarrollo de este trabajo propone como primera tarea definir la función que desempeñará la interfaz de comunicación, de esta manera se podrá decidir que tipo de dispositivo es el adecuado para desarrollar dicha interfaz.
Una vez seleccionado el dispositivo a utilizar, se iniciará la configuración de este para lograr que realice las tareas que a continuación se enlistan:
Configuración de un puerto serial (RS-232) para recepción de tramas NMEA desde un dispositivo receptor GNSS.
Interpretación, filtrado y adecuación de datos de las tramas NMEA.
Configuración del puerto Ethernet (RJ45) para envío a través de una red IP, de tramas NMEA seleccionadas en el paso anterior.
Introducción
Frente a los avances de la tecnología en sistemas de navegación satelital, en México se trata de explotar la información contenida en las señales que recibimos de estos, información como ubicación, satélites a la vista, comportamiento ionosferico y algunos datos más, que permiten mejorar algunas aplicaciones en muy diversas áreas. Estas aplicaciones incluyen la asistencia de ubicación, trazo de rutas aéreas, asistencia marítima, algunas aplicaciones geológicas, control animal entre muchas más.
De aquí surge la idea del proyecto GNSS que ayudará a aprovechar de mejor manera estas señales, permitiendo el monitoreo de los sistemas GNSS, para verificar principalmente si la información que es emitida es viable en tiempo real, o se ve afectada por alguna contingencia, ya sea ambiental o técnica.
En este proyecto se manejan diferentes bloques dentro de los cuales existen estaciones de monitoreo que nos permitirán realizar la tarea mencionada, para difundir estos datos, se genera la interfaz de comunicación entre una estación de monitoreo y una estación central de GNSS, tema que se aborda de manera detallada en los capítulos posteriores.
Tomando en cuenta primeramente la composición de los sistemas GNSS, y cuales son los que tenemos visibles en México, pasando a las funciones de un sistema de monitoreo, consideramos aquellos aspectos que rodean al proyecto y que dan lugar a la importancia de este trabajo.
En las ultimas secciones se desarrolla la interfaz que logra la conexión de un sistema basado en un microcontrolador, a una red local, en el desarrollo de esta etapa se enfrentaron diversas contrariedades que fueron solucionadas, como la adaptación de la conexión serial del receptor GPS utilizado, con el sistema EasyWeb 2, el control de la información dentro de la memoria del sistema, donde el principal problema ha sido optimizar la memoria con que cuenta nuestro hardware para poder generar un flujo en tiempo real.
adecuadamente. Una vez inicializado hubo dos caminos a seguir, el desarrollo de un driver propio o la elección de alguno ya existente para controlar esta tarea. El camino a seguir fue elegir un driver ya elaborado y de libre distribución disponible en la WEB con el cual se facilitaría el desarrollo de la interfaz teniendo ahora solo que adaptar dicho driver a las tareas que deseamos realizar y generar las pruebas y resultados que se muestran en este documento.
En el cual se describe el proceso que se ha seguido para implementar una interfaz que permita la comunicación de una estación de monitoreo con una central de almacenamiento de un sistema GNSS. A continuación una breve reseña del contenido de cada capítulo que compone este trabajo.
Capítulo 1: Sistema Global de Navegación por Satélite.
En este primer capítulo, encontramos la explicación de un sistema GNSS (Global Navigation Satellite Systems, Sistema Global de Navegación por Satélite), respondiendo a las cuestiones, ¿Qué es?, ¿Cómo se conforma?, ¿Cuáles son los principales sistemas de navegación satelital en el mundo? y ¿Cómo es que brindan la información a los usuarios? De manera general se describen estos aspectos para conocer el trasfondo de este trabajo.
Capítulo 2: Sistema de monitoreo GNSS
En esta sección se describe que es un sistema de monitoreo, su funcionamiento y finalidad. Se describe también el proyecto GNSS y la parte donde interviene el desarrollo de una interfaz que permita la transmisión de datos desde un receptor GNSS a través de una red IP.
Por otra parte se explica el procedimiento de selección del dispositivo que se utilizó para el desarrollo de la interfaz de comunicación, las opciones que se consideraron, cual fue elegida y porque.
Capítulo 3: Elementos para el desarrollo del sistema
Aquí se analiza el equipo seleccionado para desarrollar la interfaz, el dispositivo GPS que se utiliza para la recepción de tramas NMEA y las herramientas de programación que se emplean. Se describen los elementos que integran particularmente el sistema EasyWeb 2 y el modo en que funciona la herramienta de programación empleada, el IAR Embedded Workbench.
Capítulo 4: Desarrollo de la interfaz de comunicación
En este último apartado, se explican las fases en que opera la interfaz desarrollada: recepción, proceso y configuración y transmisión por una red IP a través de un puerto Ethernet de las tramas NMEA. Se explica como es generado el código que configura al sistema EasyWeb 2 para fungir como interfaz de comunicación.
Capítulo 5. Pruebas y Resultados.
En el último capítulo de este trabajo se presentan los resultados obtenidos de las pruebas que se realizaron hasta llegar a mostrar la información transmitida del receptor GPS en un entorno WEB a través una red LAN.
Capítulo 1
El término GNSS por sus siglas en inglés Global Navigation Satellite Systems, hace referencia a todos aquellos sistemas satelitales de posicionamiento global que otorgan la ubicación o posición de un objeto situado en cualquier punto de la superficie terrestre, por medio de las tres coordenadas espaciales (latitud, longitud y altitud), además de la referencia de tiempo dada por el sistema [1].
La manera en que GNSS entrega esta información es mediante una constelación de satélites de referencia, donde cada uno de los satélites difunde una señal de hora y un mensaje de datos con sus parámetros orbitales (datos de efemérides), a través de la combinación de estos datos y por medio del receptor, el usuario puede determinar su posicionamiento exacto o muy aproximado, para esto, se requiere de un mínimo de lectura de información de 4 satélites para poder obtener datos válidos para determinar el posicionamiento del usuario [1].
1.1 Posicionamiento
La posición de un usuario de en un sistema GNSS es determinada por mediciones pasivas en tres dimensiones espaciales y el tiempo de recepción de la señal [ ]. Este tiempo es determinado por el reloj interno del receptor, mientras el tiempo de transmisión [ ] de cada señal, es obtenida por el código de recorrido y el mensaje de datos.
Cuando los relojes de satélite y de usuario están sincronizados, la distancia ρ, entre el satélite y el usuario, se obtiene por la diferencia entre los tiempos de transmisión y de recepción multiplicada por la velocidad de la luz, c. Matemáticamente se describe en la ecuación (1.1)
( )
(1.1)
radio ρ1 y ρ2 respectivamente, agregando el resultado de un tercer satélite, la posición se reduce a dos puntos como se ilustra en la figura 1.1. De los dos puntos obtenidos, será viable solo uno de ellos en la gran mayoría de aplicaciones, debido a que el otro punto se encuentra fuera de la superficie terrestre o fuera del área de operación. Si los dos puntos son viables se utiliza un cuarto satélite que resuelve la ambigüedad en el sistema [1].
Figura 1.1 Solución de posicionamiento
1.2 Arquitectura de GNSS
Los sistemas GNSS están conformados principalmente por tres partes: Segmento espacial
Segmento de control o en tierra Segmento de usuario
1.2.1 Segmento espacial
Este segmento está constituido por los satélites que envían la información que contiene su ubicación espacial y temporal hacia los otros dos segmentos, a este conjunto de satélites lo llamamos también, “constelación de satélites”.
Las principales constelaciones de satélites existentes de GNSS son: GPS
GLONASS Galileo
Sistemas regionales
o Beidou y Compass o QZSS
o IRNSS
1.2.2 Segmento de control o segmento en Tierra
Consta de una red de estaciones de monitoreo, puestos de control y una serie de estaciones de enlace ascendente. Las estaciones de monitoreo obtienen mediciones que llegan de los satélites y las envían a las estaciones de control, son ubicadas en lugares elegidos estratégicamente para poder tener visión y lectura de los satélites, también cuentan con un reloj sincronizado entre ellas, ya que sus mediciones se usan para determinar las órbitas de los satélites y calibrar los relojes de estos [1].
Las estaciones o puestos de control calculan el mensaje de datos de navegación para cada satélite y determinan si algún satélite necesita alguna corrección
generando así las maniobras que se deben realizar, gran parte de las maniobras que se llevan a cabo son pequeñas correcciones o ajustes para mantener a los satélites en sus órbitas correctas. Esta información es transmitida a las estaciones de enlace ascendente, que la hacen llegar a los satélites [1].
1.2.3 Segmento de usuario
El segmento de usuario de los sistemas de navegación satelital, depende rigurosamente del sistema en el que se esté trabajando, GPS, GLONASS, Galileo, sistemas regionales o de manera general, GNSS. En el caso de receptores de este tipo, pueden recibir las radioseñales de las constelaciones de satélites de los otros sistemas [1].
Se puede ver en la figura 1.2, los componentes que son parte del equipo receptor, donde, la antena convierte las señales de radio GNSS provenientes del satélite en señales eléctricas, que se introducen en el receptor, son demoduladas y en comparación con un reloj interno, entregan una referencia de tiempo. El procesador utiliza algoritmos de adquisición y seguimiento para determinar el alcance de la antena a cada uno de los satélites utilizados, de igual manera, controla el receptor y decodifica los mensajes de navegación. Por último, el procesador de navegación utiliza las mediciones de distancia para calcular la posición, velocidad y tiempo.
1.3 Sistemas que componen GNSS
Cada sistema que compone a GNSS cuenta con los tres segmentos mencionados anteriormente, en esta sección se muestra principalmente la composición de las constelaciones satelitales (segmentos espaciales) de cada sistema. Los segmentos de control o en tierra y de usuario en cada sistema tienen un esquema muy similar, diferenciados por el rango de frecuencias en que trabajan las señales de radio transmitidas por los satélites con las antenas del receptor particular de cada uno de los sistemas mencionados.
1.3.1 Sistema de Posicionamiento Global (GPS)
Es un sistema que utiliza mediciones de distancia precisas de satélites, nombrado así por sus siglas provenientes de Global Positioning System, fue creado y es controlado por la Fuerza Aérea de los Estados Unidos, se compone de tres segmentos; espacial, de control y de usuario [2].
abierto el SPS para que cualquier usuario con un equipo compatible con GPS haga uso de este [1].
[image:20.612.196.416.271.394.2]GPS está constituido por una constelación de entre 24 y 36 satélites, 24 de estos se encuentran operando, mientras que el resto está de respaldo para si alguno de los anteriores falla. La constelación GPS se encuentra dividida en bloques de satélites, en la tabla 1.1 se muestran la división en bloques de satélites, cuando fueron lanzados y cuantos satélites componen cada bloque, el bloque I está formado por satélites de prueba, mientras que el bloque II junto con sus derivaciones contienen a los satélites en operación y el bloque III los satélites que se pondrán en órbita próximamente [1].
Tabla 1.1 Bloques de Satélites de GPS
Bloque de
Satélites GPS Fecha de Lanzamiento Número de Satélites Bloque I 1978-1985 10 *
Bloque II 1989-1990 9
Bloque IIA 1990-1997 19
Bloque IIR 1197-2004 12 *
Bloque IIR-M 2005-2008 8
Bloque IIF 2008-2011 12-16
Bloque III 2011-2013 24 (Planeado)
Nota *: existen lanzamientos fallidos
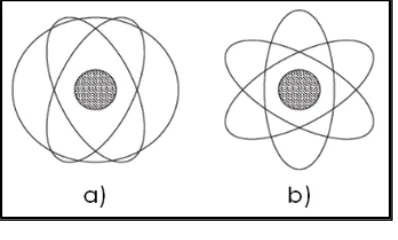
Los satélites se encuentran distribuidos en 6 planos orbitales, dichos planos tienen una forma elíptica y están a 20100 km sobre la superficie terrestre aproximadamente, con una inclinación de 55° con respecto del ecuador y cada uno de los satélites completa una vuelta en su órbita en casi 12 horas, la figura 1.3 muestra las orbitas de los satélites GPS vista desde el ecuador (figura 1.3-a) y desde el polo de la tierra (figura 1.3-b).
Figura 1.3 Planos orbitales de satélites GPS a) Vista desde el Ecuador
[image:20.612.188.428.522.665.2]1.3.2 GLONASS
Sistema creado a mediados de los 70’s con fines militares por la URSS a la par de GPS por Estados Unidos y de igual manera, ofrece una banda militar y una civil, recibe su nombre de las siglas de Global’naya Navigatsionnaya Sputnikovaya
Sistema [1].
[image:21.612.144.469.265.339.2]El sistema GLONASS está constituido por un total de 24 satélites, 3 de estos están destinados para remplazar a alguno de los restantes que falle, GLONASS ha sufrido dos modificaciones importantes, las cuales se muestran en la tabla 1.2 junto con las mejoras realizadas y la fecha en que se llevaron a cabo.
Tabla 1.2 Generaciones de GLONASS
Generación Fecha Mejoras Numero de Satélites GLONASS-M 2003 - Señal civil adicional
- Mayor precisión de reloj - Tiempo de vida de 7 años
11
GLONASS-K 2009 - Tiempo de vida de 10 años 27
En la figura 1.4 se muestra los 3 planos orbitales en los cuales trabaja GLONASS desde la vista del Ecuador y del Polo, estos se encuentran a 19100 km sobre la superficie terrestre con una inclinación de 64.8° con respecto al Ecuador y separados 120° entre ellos, tardando cada satélite 11 horas y 15 minutos en recorrer su órbita [1].
Figura 1.4 Planos orbitales de satélites GLONASS a) Vista desde el Ecuador
b) Vista desde el Polo
1.3.3 Galileo
[image:21.612.208.407.460.580.2]La ESA (European Space Agency), puso en orbita los dos primeros satélites de este sistema, GIOVE-A y B en 2005 y 2008 respectivamente, únicamente para reservar las frecuencias asignadas para el sistema Galileo, posteriormente, el 21 de octubre 2011 se enviaron los primeros dos de cuatro satélites operativos para validar el concepto de Galileo en el espacio y en la Tierra [3].
Galileo aún se encuentra en desarrollo y busca completar la puesta en órbita de sus satélites y su correcto funcionamiento en a partir del 2012, contemplando estar en su óptimo funcionamiento para el año 2014.
La constelación satelital de Galileo se conformará por 27 satélites divididos en tres planos orbitales mostrados en la figura 1.5, estos tienen forma elíptica ubicados a 23200 km de distancia sobre la superficie terrestre con una inclinación de 57° con respecto al Ecuador, las órbitas son recorridas por los satélites en 14 horas y 5 minutos [1].
Galileo ofrece cuatro tipos de navegación:
Servicio abierto (OS).- provee servicio en dos bandas de frecuencia a todos los usuarios con un receptor libre [1].
Servicio seguro (SOL).- es un servicio similar a OS agregando aquí a la señal integridad y datos de autenticación que valida que la señal de galileo es genuina y da seguridad ante la suplantación de identidad [1].
Servicio comercial (CS).- proporcionar una mayor exactitud para usuarios que estén dispuestos a pagar una cuota, cuenta con señales codificadas en una tercera banda de frecuencia con mayor protección contra interferencias. [1]
Servicio público regulado (PRS).- servicio con más integridad, continuidad y resistencia a la interferencia de señal para algunos usuarios en lugares específicos [1].
[image:22.612.209.406.567.677.2]Además Galileo cuenta con un servicio privado de búsqueda y rescate (SAR).
Figura 1.5 Planos orbitales de satélites Galileo a) Vista desde el Ecuador
1.3.4 Sistemas Regionales
Los sistemas regionales de localización satelital que existen son el Beidou y Compass en China, el QZSS en Japón y en India el IRNSS.
Beidou y Compass.- El sistema de navegación Beidou, comenzó como Big Dippery, su primer lanzamiento fue en el 2002 y está conformado por tres satélites en las latitudes de 80.2°, 110.4°, y 139.9°, comenzó a funcionar totalmente en el año 2004, y cubre una zona entre latitudes de 70° a 150°, todas ellas en el hemisferio norte, que es el área de China y algunos países vecinos. La figura 1.6 muestra el área de cobertura del sistema, este sistema funciona completamente independiente de los GNSS [1].
[image:23.612.218.394.352.475.2]Una ventaja de este sistema, es que para poder dar al usuario una información útil, a diferencia de los GNSS, en este caso solo será necesario tener a la vista dos satélites, del mismo modo, es para China una mayor ventaja el contar con sistema de localización satelital que está bajo su propio control.
Figura 1.6 Zona de cobertura del sistema Beidou y Compass [17]
China comenzó un programa en el 2007, lanzando dos satélites destinados a las longitudes 58.8° y 160° conocido como Compass, además de usar los satélites del sistema Beidou para ampliar su cobertura. Posteriormente agrego tres satélites más en orbitas geoestacionarias inclinados 55° y 118° con respecto al ecuador, esto permitió el posicionamiento tridimensional, mientras que también, planearon aumentar al sistema 27 satélites MEO a 27.840 Km e inclinados 55°, el primer satélite de estos 27, fue lanzado en 2007 [1].
QZSS (Quasi-Zenith Satellite System). – Es un sistema que se encarga
para cubrir de mejor manera zonas como cañones urbanos y regiones montañosas [1].
Figura 1.7 Órbita que describen los satélites QZSS [18]
Este sistema consta de tres satélites en órbita geoestacionaria separada, con una inclinación hacia el ecuador a 45 °, estos se encuentran en la misma pista sobre Asia-Pacífico, esto asegura que siempre hay por lo menos un satélite sobre Japón, en la figura 1.7 se muestra el movimiento que describen los satélites en este sistema [1].
IRNSS(Indian Regional Navigational Satellite System).- Este sistema está
destinado a proporcionar un servicio completamente independiente a GNSS dentro de la india, cubre un área de servicio de -40° a 140° con una precisión que fluctúa en 20m. Cuenta con siete satélites, tres de ellos compartidos con el sistema de aumentación GAGAN SBAS y los otros cuatro satélites se dividen en dos órbitas estacionarias inclinadas 29° [1].
1.4 Aplicación de GNSS
Al igual que muchos otros desarrollos tecnológicos, los sistemas de localización satelital, surgen con fines bélicos. Sin embargo su uso demostró que con su aplicación podía ayudar no solo a las tropas de sus países, sino también al desarrollo social.
Dentro de las aplicaciones militares busca aportar mayor exactitud en algunas armas aumentando su efectividad y evitar daños no deseados, tratando que los lugares de tregua como hospitales, no se vean afectados en las guerras.
usuario brinda mejores rutas de vuelo, de manera similar ayuda a la navegación marítima, en vehículos de reparto terrestre y actualmente estos sistemas también se han implementado para uso personal, esto debido a su difusión, por lo cual es fácil encontrar receptores GPS en cualquier dispositivo móvil y con un costo muy bajo, se ha incluido también en automóviles y en algunas otras aplicaciones para emergencias médicas o de seguridad y en dispositivos usados en el control de fauna.
1.5 Proyecto GNSS
Como se observó en su arquitectura, los sistemas GNSS están compuestos de tres segmentos que permiten ofrecer sus servicios de forma eficiente. En la figura 1.8 se muestran dichos segmentos en un diagrama a bloques, desglosando el segmento de control o en tierra que incluye el dispositivo que se desarrollará e implementará en esta tesis.
En el proyecto se busca desarrollar un dispositivo capaz de recibir tramas o efemérides de datos de cualquiera de los sistemas antes mencionados (GPS, GLONAS, Galileo y sistemas regionales), se enfoca particularmente al segmento de control o en tierra, el cual cuenta con los siguientes componentes:
Receptor
Manejo de efemérides Transmisión de tramas Estación central
Estación de enlace o de subida
1.5.1 Receptor
Es la estación base conformada principalmente por la antena receptora, que tendrá la característica especial de ser capaz de recibir información de cualquiera de las frecuencias que corresponden a cada uno de los sistemas de navegación satelital.
1.5.2 Manejo de efemérides
Es el dispositivo que recibe los datos obtenidos de la antena, lo convierte en información coherente y legible, eliminando la información no necesaria y alistando las tramas para su difusión.
1.5.3 Interfaz de envío
En esta parte del proyecto es donde se enfocará el trabajo. La principal función que desempeñara esta interfaz es obtener las efemérides que entrega el dispositivo que manipula la información y convertirla en tramas compatibles para su transmisión por medio de internet.
La información que se transmitirá, se hará llegar desde las estaciones base, ubicadas muchas veces en lugares remotos, hasta un servidor en una estación central donde estará disponible para su uso.
A lo largo de este documento, se abordaran los puntos clave para conocer el funcionamiento e importancia de la interface en desarrollo.
1.5.4 Estación central
Dentro de estas tramas, se incluye información no solo de localización espacial y temporal de los satélites, sino también información referente al estado de estos, si alguno de ellos tiene cierta desviación de su órbita o algún problema en su sistema, estos errores se podrán detectar en la estación central y de ser posible se corregirán desde este punto, cuando se detectan problemas de mayor magnitud, solo se reporta a la sección pertinente para verificar que el problema no se agrave y sea rectificado a la brevedad.
1.5.5 Estación de enlace o de subida
Capítulo 2
En México, no se dispone de manera propia de un sistema de navegación satelital que permita la obtención de información geo referencial de un objeto en el plano terrestre, sin embargo existe la posibilidad de consultar las secciones abiertas al público de los sistemas mencionados en el capítulo I de este documento. De esta manera surge el proyecto GNSS que busca adquirir y manipular la información que sea posible obtener de los sistemas de navegación satelital y utilizarla para apoyar diversas aplicaciones como: navegación aérea, marítima y terrestre y posicionamiento personal, entre otras.
2.1 Arquitectura del proyecto GNSS
El proyecto GNSS está constituido por una serie de bloques que arrojan como resultado una estación de monitoreo local de un sistema GNSS, el desarrollo de este segmento, contempla tomar las señales de los distintos sistemas de navegación satelital, mencionados en el capítulo 1, para brindar un servicio de monitoreo satelital en el área de nuestro país.
El proyecto está conformado por dos partes principales, las estaciones de monitoreo regional y la estación central que integrará y procesará la información de las estaciones regionales.
2.1.1 Estaciones de monitoreo
Las estaciones de monitoreo, se encargarán de obtener la información proveniente del segmento espacial (satélites), se ubicarán en lugares geográficos estratégicamente seleccionados para tener a la vista la mayor cantidad posible de satélites de los sistemas de navegación. De esta manera se podrá obtener más información del segmento espacial de GNSS.
En la figura 2.1 se muestra el diagrama a bloques de la estación de monitoreo, donde cada uno de estos representa las diversas tareas a desarrollar en el proyecto GNSS, el primer bloque corresponde al diseño y construcción de un arreglo de antenas que produzca un patrón de radiación semiesférico y que opere sobre un ancho de banda que abarque los diferentes GNSS (GPS/GLONASS/GALILEO/COMPASS).
El segundo bloque corresponde a la terminal de entrada de radio frecuencia que será utilizada para recibir las señales GNSS del aire y procesarlas de tal manera que a la salida entregue la señal de banda base digitalizada.
módulo integra todas las etapas anteriores para dar forma a un receptor de señales GNSS.
El cuarto bloque, tiene por objetivo desarrollar un sistema de monitoreo local que permita evaluar el desempeño de los GNSS en el área geográfica donde esté instalado.
Y el último segmento que corresponde al sistema de monitoreo de desempeño GNSS es donde se requiere, como una de las tareas, la implementación de la interfaz de comunicación de la estación de monitoreo con la estación central de GNSS.
2.1.2 Estación central
Por otra parte, la estación central, es aquella que se encarga de manejar la información obtenida por el receptor, filtrar las tramas que contienen información más relevante y almacenarlas en una base de datos que permitirá su consulta a futuro o en tiempo real.
Figura 2.2 Interacción entre una estación de monitoreo y la estación central del sistema de monitoreo GNSS.
La principal función de la estación central es detectar posibles errores en el segmento espacial o en la recepción de las señales transmitidas por los satélites, sea cual sea la causa (condiciones climatológicas, condiciones de la ionósfera que dependen de la hora del día en que se toma la lectura, fallo de algún satélite, entre
otras). Una vez detectada la causa, esta información se hace llegar al módulo o entidad correspondiente de la estación central para procesar los fallos detectados. Otra función que tienen estas estaciones es proporcionar información en tiempo real de la condición de los sistemas de navegación y de las condiciones climatológicas a las aeronaves que naveguen sobre la zona de cobertura de las estaciones de monitoreo, cuando esta información les sea solicitada.
La estación de control se compone básicamente de una computadora que se encarga del proceso y manejo de los datos. En la figura 2.2 se muestra la interacción existente entre la estación de monitoreo, la estación central y los usuarios que requieren la información obtenida.
2.2 Enfoque de proyecto
La atención de la tesis se centra en el desarrollo de la interfaz de comunicación entre la estación de monitoreo regional o remoto y la estación de control. Dicha interfaz cuenta con las siguientes características:
Adquisición de datos provenientes del receptor GPS, GLONASS, WASS, Galileo, COMPASS y otros varios sistemas GNSS.
Adaptación de tramas y paquetes para su difusión.
Difusión de paquetes en internet mediante protocolos de comunicación y datos.
Para definir el funcionamiento de la interfaz, en este capítulo se muestra como se adquiere la información y se busca la manera más óptima para su transmisión.
2.3 GNSS en México
El desarrollo del proyecto del sistema de monitoreo de los GNSS se lleva a cabo para solucionar la falta de un sistema propio en México que permita la obtención de los datos georeferenciales que apoyen principalmente a la navegación marítima y aérea, operación de servicios de emergencia, construcción de vías de comunicación y muchos servicio más que en la actualidad han hecho de sistemas como GPS una herramienta indispensable en su existir.
encontrar en GNSS son: fallas en los relojes atómicos de cada satélite, interferencia de las partículas libres de la ionósfera en la recepción de las señales y atenuación de la señal o llegada con baja potencia.
Los sistemas en sus tramas envían información del estado atmosférico y de la ionosfera, de la zona en la que se realizan las lecturas, se corroborará si existe algún problema de sincronización entre satélites o si la potencia con que se reciben es suficiente para el sistema, esta información será consultada, analizada, manipulada y transmitida para su uso requerido por parte de los usuarios.
2.3 Sistema de monitoreo del desempeño GNSS
Como su nombre nos indica, este sistema permite conocer y evaluar el comportamiento y desempeño de GNSS de manera continua, dando a conocer en qué momentos este opera de manera adecuada, óptima o con fallos, cuantos satélites podemos ver, cuales son esos satélites y algunos otros datos que son relevantes para el buen funcionamiento de GNSS.
La tabla 2.1, muestra los sistemas que serán monitoreados y el número de satélites que a la fecha tiene en operación cada sistema. Tomando en cuenta que no todos los sistemas de navegación existentes son visibles desde el territorio mexicano.
Cada sistema de navegación satelital brinda información particular, y lo hace en diferentes formatos.
Tabla 2.1 Visibilidad y disposición de sistemas en México
Sistema de
navegación Número total de satélites Satélites en operación México SI/NO Visible en
GPS 31 24 SI
GLONASS 27 23 SI
Galileo 2 1 NO
Beidou 11 11 NO
2.3.1 Monitoreo de GPS
GPS con sus 24 satélites en operación, brinda información en el sistema WGS-84, empleando para la transmisión de información códigos de pseudo-ruido (pseudo-random noise), es decir, códigos con propiedades parecidas a las del ruido.
marítima y receptores GPS con la intención de que estos puedan compartir información entre ellos, este formato se rige mediante el estándar NMEA 0183[14], el cual utiliza una comunicación asíncrona entre un transmisor y un receptor, esta comunicación debe contener los siguientes parámetros:
Velocidad de transferencia de 4800 bps (bauidos) 8 bits de datos
No paridad 1 bit de parada
Dentro del formato, existen diversas tramas que contienen información sobre el sistema GPS, sin embargo, de forma general una trama NMEA está conformada de la siguiente manera; cada sentencia inicia con el símbolo “$” y termina retornando a otra línea. Cada línea o trama tiene una longitud de 80 caracteres o símbolos, cuenta en común también con las letras “GP” y un consecutivo de 3 símbolos alfabéticos que diferencian a cada línea como se puede observar en la figura 2.3.
Tabla 2.2 Tramas NMEA de algunos receptores comerciales
$ GPBWC Rumbo y distancia hasta el punto de referencia.
$ GPGGA Posicionamiento Global de Datos del Sistema Fix
$ GPGLL La posición geográfica, latitud / longitud
$ GPGSA GPS DOP y satélites activos
$ GPGSV Los satélites GPS a la vista
$ GPRMA Mínimo de datos recomendado en específicos Loran-C
$ GPSTN ID de datos múltiples
$ GPVTG Seguimiento hecho una buena velocidad
$ GPZDA Fecha y hora
Los datos contenidos en las líneas se separan por comas “,” y al final de la línea encontramos el checksum o suma de verificación, que se identifica por dos dígitos hexadecimales precedidos por el símbolo “*”. En la tabla 2.2 se muestran algunas de las tramas existentes del formato NMEA que arrojan ciertos receptores comerciales.
2.3.1 Monitoreo de GLONASS
GLONASS tiene en operación un total de 24 satélites de los cuales, al igual que de GPS, se puede obtener información de estos, la diferencia importante que existe, es que la información es transmitida en el sistema PZ-90, el cual contiene tramas con datos similares a los del sistema WGS-84, posicionamiento del satélite, que satélite envía la trama, la hora en que se recibe, etcétera.
En los receptores GLONASS se ha buscado la compatibilidad con el formato de tramas NMEA para la interpretación de la información, debido a que algunos de los receptores existentes actualmente en el mercado disponen de recepción de las señales de ambos sistemas de navegación.
Figura 2.4 Tramas NMEA de un receptor GNSS
Actualmente estos receptores permiten observar la información adquirida de la constelación GLONASS en el mismo formato (NMEA), con la diferencia notable que estas tramas se identifican con los caracteres “GL” después del símbolo inicial de la trama ($) y seguido por los tres símbolos que determinan a que trama se refiere, podemos apreciar una trama NMEA de un receptor GNSS en la figura 2.4.
2.4 Principios de adquisición de datos
La adquisición de datos del segmento espacial se hará en la estación de monitoreo mediante un dispositivo receptor desarrollado en el mismo proyecto paralelamente con el resto de los elementos.
Sin embargo, para realizar las pruebas correspondientes al desarrollo de la interfaz de comunicación, se utiliza un receptor de tipo comercial, particularmente se ha trabajado con el receptor GPS eTrex de la marca Garmin. Que cuenta con las siguientes características.
Recepción de 12 canales
Actualización de datos cada segundo Interfaz NMEA 0183 y RS-232 para PC
Este receptor como la gran mayoría de los receptores GPS de tipo comercial cuenta con un puerto de comunicación serial (RS-232). Esto facilita la comunicación remota con este tipo de dispositivos ya que las estaciones de monitoreo se encontrarán algunas veces en zonas lejanas (para tener una mejor visibilidad del espacio aéreo). Adicionalmente se tiene contemplado el despliegue de una red de estaciones de monitoreo que deberán mantener un enlace comunicación con una estación de control.
Esta red de estaciones de monitoreo permitirá realizar comparaciones de la información y monitoreo de satélites entre distintas estaciones de monitoreo, para corroborar diferencias entre los resultados proporcionados por cada una de las estaciones.
Para realizar el enlace de comunicación entre las estaciones de monitoreo y la estación de central se ha definido el desarrollo de un sistema basado en un microcontrolador como se muestra en la figura 2.2. Este sistema soportará el estándar RS-232 y por otro lado la conexión a internet mediante las normas correspondientes, los estándares y protocolos de transmisión de datos necesarios, en este caso el estándar IEEE 802.3 y protocolos como UDP, TCP, IP, MAC, entre otros. Para iniciar el desarrollo de este sistema se realizó la comparación entre algunos dispositivos de diversas familias de microcontroladores, y surge la pregunta, ¿Por qué un microcontrolador y no un microprocesador?; la respuesta es que un microprocesador requiere de componentes externos como memorias y periféricos para poder interactuar y desarrollar otros procesos, esto hace que su tamaño sea mayor al de un microcontrolador aun con los periféricos necesarios interconectados a él, y a pesar de que esto hace que sea más poderoso en la tarea de procesamiento, la función que desempeñará dentro de la estación de monitoreo, no requiere gran cantidad de procesamiento de información, sino, más bien requiere que ocupe un espacio reducido. Como su tarea está bien definida, las características con que debe contar no demandan tanta exigencia como para desarrollar un sistema mínimo.
2.4.1 Comparación de Dispositivos
Primera opción
La primera opción fue el microcontrolador PIC32MX775F256H de la empresa Microchip de la familia PIC32MX7xx. En la figura 2.5 podemos ver el tipo de encapsulado de este microcontrolador, las características de este dispositivo son las siguientes:
Velocidad Máxima de 80MHz
Tamaño de memoria de programa 256 KB 64 KB de memoria RAM
5 Temporizadores digitales 16 bits o 2 Osciladores internos 8 MHz, 32 kHz USB 2.0 "On-The-Go” con periféricos integrados
[image:35.612.240.392.276.429.2] Ethernet 10/100 MAC con MII / interfaces RMII
Figura 2.5 Encapsulado del microcontrolador PIC32MX775F256H [4]
Segunda Opción
El microcontrolador ENC28J60, también de la empresa Microchip, el encapsulado de este microcontrolador se muestra en la figura 2.6 y cuenta con las siguientes características [5]:
Controlador compatible con IEEE 802.3.
Completamente compatible con redes 10/100/1000Base-T MAC integrada y 10Base-T PHY
Detecta y corrige polaridad
Soporta modos Full y Half-Duplex
Programable en relleno y la generación de CDN (Content Delivery Network) Rechazo automático programable de paquetes erróneos
Figura 2.6 Microcontrolador ENC28J60
También se consultaron algunos sistemas que cubren ya las características necesarias para la interfaz de comunicación que se requiere, a continuación se muestran los sistemas contemplados.
Tercera Opción
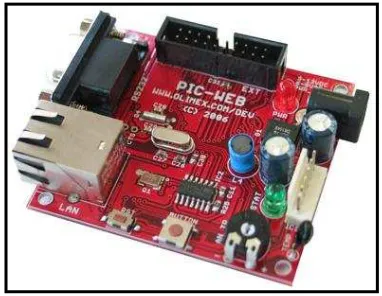
Sistema embebido PIC-WEB, este sistema como se puede notar en su nombre está basado en un microcontrolador de tipo PIC, en la figura 2.7 podemos visualizar la plaqueta de dimensiones de 60 x 65 mm, cuenta con un puerto DB9 compatible con el estándar RS-232, un puerto Ethernet RJ-45, un adaptador de corriente y además los pines que corresponden al resto de los puertos con los que cuenta el microcontrolador. [6]
Algunas de las características principales de este sistema de desarrollo, se enuncian a continuación, mientras en la tabla 2.3, se muestran las características principales del microcontrolador PIC18F67J60 en cual se basa este sistema. [6]
Microcontrolador PIC18F67J60
ICSP / ICD conector para la programación con PIC-MCP, MCP PIC-USB-y la programación y la depuración con el PIC-ICD2 y PIC-ICD2 pocket.
Poder plug-in para el suministro de 5 VDC
Regulador de voltaje 3.3 V y los condensadores de filtrado LED de estado
[image:36.612.246.382.74.139.2] Cabecera de extensión para conectar a otras juntas
Tabla 2.3 Características del microcontrolador PIC18F67J60
Parámetro Valor
Memoria de programa 128 KB
Memoria RAM 3,808 bytes
Comunicación digital con periféricos 1-A/E/USART, 1-MSSP(SPI/I2C)
Contadores (Timers) 2 x 8-bit, 3 x 16-bit
Ethernet 10 Base T
Rango de temperatura -40°C a 85°C
Voltaje de operación 2 a 3.6 V
Figura 2.7 Sistema embebido PIC-WEB
Cuarta Opción
La siguiente y última opción considerada, es también un sistema embebido controlado por un microcontrolador de la empresa Texas instruments de la familia MSP430 y corresponde al nombre MSP430-easyWeb2.
Es un sistema integrado en una placa con dimensiones de 138 x 83 mm, se muestra en la figura 2.8, dentro de la cual cuenta con los siguientes componentes y características [7]:
Microcontrolador MSP430F149
Controlador LAN CS8900 transformador a RJ45 3 LEDs de estado del conector LAN
4 interruptores push button Puerto DB9 RS-232
Conector para puertos del microcontrolador Display LCD 16x2
Cristal de oscilación de 8Mhz
A continuación, se muestran las características propias del microcontrolador MSP430F149 [8]:
Bajo rango de voltaje, de 1.8 a 3.6 V 2 temporizadores de 16 bits
Dos interfaz de comunicación serie (USART), funciona como asíncrona o síncrona SPI UART interfaz
Figura 2.8 Sistema de desarrollo MSP430-easyWeb2
2.5 Sistema seleccionado: MSP430-
EasyWeb2
El sistema elegido para el desarrollo de la interfaz de comunicación, fue el sistema MSP430-easyWeb2, por diversos motivos, se comienza por responder la cuestión, ¿Por qué un sistema completo y no solo el microcontrolador?
La respuesta es que el sistema ya cuenta con los elementos necesarios para realizar la conexión y comunicación requerida, mientras si se toma solo el microcontrolador, habría que desarrollar un sistema similar y adecuarlo de acuerdo a las necesidades del proyecto. De esta manera quedan descartados los microcontroladores ENC28J60 y PIC32MX775F256H. En la tabla 2.4 se muestra un comparativo directo de algunas características entre los dos sistemas PIC-WEB y MSP430-easyWeb2, teniendo en cuenta los requerimientos que tiene la interfaz de comunicación a desarrollar con alguno de ellos.
Tabla 2.4 Comparación entre sistemas PIC-WEB y MSP430-easyWeb2
Puerto Serie RS-232 SI SI
Puerto Ethernet RJ-45 SI SI
USART 2 1
Compatibilidad IEEE 802.3 SI SI
Voltaje Necesario (V) 5 5
Protocolos compatibles SLIP ARP IP ICMP TCP UDP HTTP DHCP FTP
ICMP TCP UDP HTTP DHCP FTP
Memoria de programa 60 KB 128 KB
Las principales ventajas existentes del sistema MSP430-easyWeb2 frente a los microcontroladores y el sistema PIC-WEB que hicieron que la decisión se inclinara por este es que cuenta con las siguientes características:
Puerto serial. Puerto Ethernet.
Cuenta con dos unidades USART. Display LCD (permite visualizaciones).
Permite acceso por el puerto serial mediante herramientas como Hyperterminal.
Permite acceso al sistema mediante el puerto RJ-45 con una dirección IP en un entorno WEB.
Cabe destacar que aunque el sistema PIC-WEB cuenta con un poco más de memorias de procesamiento y de código, este tipo de controladores requiere mayor longitud de código por la forma en que este es programado.
[image:39.612.128.484.371.678.2]2.5.1 Principio de funcionamiento
El sistema MSP430-EasyWeb2 recibirá la información proveniente del receptor GNSS, mediante el puerto serial incorporado al sistema. Para estos fines se utilizará el receptor GPS eTrex de la marca Garmin, con fines de realización de pruebas, considerando que no será el dispositivo definitivo para trabajar en las estaciones de monitoreo. Sin embargo como el formato de las tramas NMEA y la forma en que son recibidas provienen de un estándar, no se modifica de manera considerable.
Capítulo 3
En este capítulo, se describen los dispositivos y herramientas que se utilizarán en el desarrollo de la interfaz de comunicación entre una estación de monitoreo GNSS y la estación central. Así mismo se incluyen algunas pruebas de reconocimiento de cada una de los dispositivos y herramientas.
3.1 Receptor GNSS
Dentro del mercado, existen una gran cantidad de receptores GNSS que reciben información principalmente de los sistemas GPS y GLONASS, sin embargo, gracias a que el sistema GPS es hoy en día, el mas consultado a nivel mundial, sus receptores son mas comunes y de bajo costo.
[image:42.612.252.362.321.529.2]Para las pruebas correspondientes a este punto del proyecto GNSS se utiliza el receptor GPS eTrex de la marca Garmin previamente mencionado en el capítulo 2 y se puede ver en la figura 3.1.
Figura 3.1 Receptor GPS eTrex Garmin
Este receptor solo recibe tramas GPS dentro de la banda L1 y se ha utilizado para las pruebas correspondientes a la interfaz de comunicación, ya que cuenta con transmisión de datos mediante un puerto serie bajo el estándar RS-232 en el formato NMEA. Un ejemplo de las tramas NMEA que se obtienen de este receptor, se muestran en la figura 3.2.
Figura 3.2 Tramas NMEA del receptor eTrex Garmin
Para este trabajo, la comunicación serial del receptor eTrex Garmin [9] se encuentra con la configuración de fábrica mostrada en la tabla 3.1, que debido al estándar NMEA 0183 [14], no es configurable.
Tabla 3.1 Configuración del eTrex Garmin Puerto Serial RS-232 Bits por segundo 4800
Bits de datos 8 bits
Paridad No
Bit de paro 1
3.2 Sistema
EasyWeb
2
El EasyWeb 2, mostrado en la figura 3.3 es un sistema de desarrollo que basa su funcionamiento en el microcontrolador MSP430F149. Además de contar con diversos circuitos integrados que permiten la interacción de este con los periféricos contenidos en el sistema de desarrollo, destacando el controlador de puerto Ethernet CS8900A de la marca Cirrus Logic [12].
[image:43.612.213.400.574.693.2]En la tabla 3.2, podemos ver los componentes que se encuentran conectados en la tarjeta de desarrollo EasyWeb 2, mientras que en el anexo 2, podemos encontrar el diagrama de conexión del sistema.
Tabla 3.2 Componentes del sistema EasyWeb 2
Microcontrolador MSP430F149 Texas Instruments CI adicionales MAX232
CS8900
Periféricos Pantalla LCD 16x2
2 Puertos de salida con relevadores (10A/240VAC) 4 Interruptores de entrada
4 Entradas optoacopladas 3 LEDs (indicadores) 1 Puerto DB9/RS-232 1 Puerto Ethernet
Extensión para el puerto ADC
Puerto de conexión y programación
JTAG
3.2.1 Descripción de elementos
3.2.1.1 Microcontrolador MSP430F149
Microcontrolador de la marca Texas Instruments perteneciente a la familia MSP430x14x, dicha familia se caracteriza por sus distintos modos de trabajo con bajo consumo de potencia. [8]
En el capítulo 2 se mostro una breve descripción de este microcontrolador, en este punto será descrito de manera mas detallada.
Es un encapsulado con 64 pines, como se puede observar en la figura 3.4, donde encontramos la correspondencia de cada uno de los pines. [10]
El microcontrolador MSP430F149, cuenta con dos USART, la opción de conectar un cristal externo primario y un cristal secundario. Además cuenta con dos temporizadores internos de 16 bits que permiten sustituir a los cristales externos, registros de 16 bits y un tamaño de palabra de 16 bits, que es utilizada al momento de mover información entre registros y puertos. Entre sus terminales destaca la presencia de 6 puertos que pueden ser utilizados para tareas específicas del sistema o como puertos I/O, además de terminales específicas para la conexión directa con algunos dispositivos externos [8].
Figura 3.4 Microcontrolador MSP430F149. [9]
3.2.1.2 CI adicionales
El CS8900 de la marca Cirrus Logic [12] es un CI controlador Ethernet LAN optimizado para un bus ISA adaptado a los buses de propósito general de los microcontroladores. Su alta capacidad de integración a estos, permite evitar la costosa adquisición de adaptadores extras para puertos Ethernet, ofrece diversas opciones de configuración, además de adaptarse de manera automática a cambios en los patrones de tráfico en la red y los recursos disponibles del sistema. La principal tarea del CS8900 es la transmisión y recepción de paquetes de datos por Ethernet, para esto el circuito debe tener la configuración adecuada de acuerdo a las necesidades del usuario.
Los datos se transmiten a través de un bus ISA de 16 bits, pero tiene la posibilidad de multiplexar los bytes altos y bajos. De esta manera, para la conexión con el microcontrolador, los pines se reducen a 14, de los cuales, 8 pines son para datos, 4 mas para indicar la dirección de memoria para escritura o lectura y 2 para la señalización de escritura o lectura, en la figura 3.5 podemos ver la interconexión con el MSP430F149.
El primero es el modo “memoria”, donde los registros internos y los buffers para las tramas son mapeados en un bloque continuo de memoria de 4 KB; la lectura y escritura se realizan poniendo en cero los pines MEMR y MEMW [12].
El segundo modo de operación es el “modo de I/O” y está elegido por omisión. Para operaciones de lectura o escritura en el modo de I/O debe ponerse el pin AEN en cero y la dirección de I/O de 16 bits debe coincidir con el espacio de direccionamiento del CS8900, cuya dirección base es la 0x0300 por omisión. Para lectura, el pin IOR debe estar en cero, de igual modo, para escritura, el pin IOW debe estar en cero [12].
[image:46.612.184.434.327.695.2]Es posible notar en el esquema de la tarjeta EasyWeb 2 que el modo escogido por diseño para la operación del chip CS8900 es el segundo, “modo de I/O”.
Por otro lado tenemos la interacción con el puerto serie por medio del CI MAX232, que es un adaptador de niveles de voltaje entre el microcontrolador y el puerto serie bajo el estándar RS-232 en ambas direcciones. Este circuito se encuentra conectado al microcontrolador en las terminales 32 y 33 correspondientes a UTXD0 y URXD0 respectivamente, mientras que su conexión al puerto RS-232 la podemos ver en la figura 3.6.
Figura 3.6 Conexión MAX232 – RS-232
3.2.1.2 Periféricos
Los dispositivos periféricos con los que cuenta el sistema EasyWeb 2, se mencionan en la tabla 3.2. Estos dispositivos tienen como función, permitir la comunicación del sistema con otros subsistemas o elementos útiles para la aplicación a desarrollar del usuario. Para la aplicación desarrollada en este trabajo, solo se utilizaran, por el momento el LCD y los LEDs indicadores.
Tomando en cuenta, que por la magnitud del proyecto en general, se pensó en esta placa de desarrollo, para que a futuro se contemple el uso de los puertos existentes para la resolución de problemas que pudieran presentarse.
3.2.1.2 Puerto JTAG
La conexión de este puerto al microcontrolador se realiza mediante los pines TCK, TDI, TD0/TD1 y TNS correspondientes a las terminales 57, 55, 54 y 56 respectivamente como lo podemos ver en la figura 3.7.
Figura 3.7 Puerto JTAG
Para poder interactuar desde un ordenador con el sistema EasyWeb 2, es necesaria una interfaz de comunicación, comúnmente conocida como dispositivo programador, existen diferentes programadores, en este caso se utiliza el MSP430-JTAG-ISO del fabricante Olimex Ltd lo podemos ver en la figura 3.8 [13].
Figura 3.8 Programador MSP430-JTAG-ISO Olimex Ltd.
3.3 Herramienta de programación
Para desarrollar los programas de configuración del sistema EasyWeb 2, se utiliza la herramienta de programación IAR Embedded Workbench.
necesarias para hacer compatible este lenguaje con una gran gama de microcontroladores. Sin embargo, IAR, permite también desarrollo de aplicaciones en lenguaje ensamblador. Existen dos modos de trabajo de esta herramienta, son el modo de programación y modo de depuración.
El modo de programación, lo vemos mientras se trabaja de manera normal en el desarrollo del conjunto de instrucciones (código), útil para indicar al microcontrolador el procedimiento y tareas a desempeñar. Podemos distinguir en este modo de trabajo cuatro secciones dentro de la aplicación, marcadas con las letras A, B, C y D en la figura 3.9.
A: esta área refiere a los menús disponibles en la aplicación, para poder generar proyectos, abrir trabajos anteriores, configurar la misma ventana, ajustar las opciones de la herramienta IAR, entre muchas otras tareas. De igual manera, encontramos algunos accesos rápidos a diversas opciones existentes, como “compilación”, “guardar”, etcétera.
B: el “área de trabajo”, en este espacio podemos acceder a los archivos incluidos en nuestro proyecto, organizados en los diferentes directorios correspondientes a este.
C: en esta sección, es donde se nos permite escribir todas las líneas de instrucciones que deseamos agregar a la programación de nuestro dispositivo.
[image:49.612.186.461.444.691.2] D: esta zona, permite visualizar los pasos de compilación y los errores que lleguen a existir en la programación.
En la figura 3.10 tenemos ahora la ventana de la herramienta en el modo de depuración, y notamos que se mantienen las áreas anteriores (A, B, C y D) y se han agregado algunas secciones más.
A: esta sección se conserva agregando los botones que permiten el control de la depuración, pudiéndola manipular “paso a paso”, detener, pausar, etcétera.
B: el “área de trabajo” permanece sin modificaciones.
C: en la zona del código sigue mostrándose, solo que no nos permite modificar y además, nos muestra con color verde la línea de código en que se encuentra depurando la aplicación.
D: esta área nos muestra ahora los pasos que se realizaron para comenzar la depuración.
E: “watch” en esta zona podemos ver los valores que van tomando las variables dentro de nuestro programa.
F: permite ver la ejecución de las instrucciones en lenguaje ensamblador. G: muestra los valores que van adquiriendo los registros del
[image:50.612.91.530.301.597.2]microcontrolador después de cada instrucción.
Figura 3.10 Ventana de IAR Embedded Wrokbench en modo de depuración.
3.4 Pruebas de reconocimiento
conocer la forma de programar y configurar el sistema, así como la manera de interactuar con los elementos incluidos en este, estos programas los podemos encontrar en el apéndice A de este trabajo.
El código de abajo, muestra una sección del código correspondiente a un programa prueba de los LEDs de estado y el BUZZER incluidos en el sistema, es un programa básico con la finalidad de reconocimiento de la forma en que la herramienta IAR permite la programación del EasyWeb 2.
for (;;) {
volatile unsigned int i;
P4OUT ^= 0x08; // Toggle P2.1 using exclusive-OR
P2OUT ^= 0x02;
i = 50000; // Delay
do (i--); while (i != 0); }
Figura 3.11 Conexión de push button con el microcontrolador
El siguiente segmento de código, nos permite ahora verificar la funcionalidad de los push button mientras que en la figura 3.11 podemos ver la conexión de dichos dispositivos con el microcontrolador. El código completo a esta prueba se puede ver en el apéndice A.
for(;;){
s = P4IN; s = (s & 0xF0);
Capítulo 4
En el capítulo, se explica el proceso que se ha llevado a cabo para lograr la configuración para que el sistema EasyWeb 2 cumpla con la función de la interfaz de comunicación entre una estación de monitoreo y la estación central en el proyecto GNSS.
Para explicar de manera mas completa este proceso, podemos dividirlo en dos etapas, antes y después del paso de la información a través de la interfaz de comunicación (recepción y envío de tramas respectivamente). En el anexo 1 encontraremos el diagrama de flujo sobre el cual se desarrolla el código.
4.1 Recepción de tramas NMEA
Esta primera etapa del desarrollo de la interfaz de comunicación, corresponde a los procesos efectuados para lograr tener la información proveniente del GPS en la memoria interna del microcontrolador, así también su filtrado e interpretación.
4.1.1 Interconexión
GPS-EasyWeb 2
[image:53.612.220.392.417.640.2]Primeramente, fue necesario realizar un adaptador para poder interconectar al receptor GPS eTrex Garmin con el sistema EasyWeb 2, debido a que ambos dispositivos cuentan con un puerto serial RS-232 tipo “hembra” como se observa en la figura 4.1.
Figura 4.1 Puertos serie tipo "hembra"
mostrada en la figura 4.2, en dicha configuración podemos observar que se encuentran invertidos los pines de transmisión (Tx) y recepción (Rx) de datos de un conector a otro, con base a la tabla 4.1 que nos muestra la función de cada uno de los pines.
Tabla 4.1 Descripción de pines puerto DB9
Pin Nombre Descripción
1 CD Detección de portadora
2 RX Recepción de datos
3 TX Transmisión de datos
4 DTR Preparado para transmitir de datos
5 GND Tierra
6 DSR Preparado para recibir datos
7 RTS Solicitud de envío
8 CTS Borrado para enviar
9 RI Indicador de llamada
[image:54.612.244.366.400.505.2]Esta configuración tiene la finalidad de que el sistema EasyWeb 2 recibiera de manera adecuada los datos transmitidos por el GPS, ya que si se interconectan de manera recta, ambos transmisores estarían conectados entre ellos y así mismo los receptores, de modo que los datos transmitidos por el GPS no podrían ser leídos por la interfaz.
Figura 4.2 Conexión seria DB9 "macho-macho"
4.1.2 Configuración de USART
Para poder leer los datos del GPS en la interfaz, de debe ajustar el puerto serie RS-232 a la configuración dada de fábrica del primero, dicha configuración ha sido mostrada en el capítulo 3 (tabla 3.1 Configuración del eTrex Garmin), de manera breve, deben considerarse las siguientes características:
Transmisión de 4800 bits por segundo (baudios) No paridad, bit de paro 1



![Figura 1.6 Zona de cobertura del sistema Beidou y Compass [17]](https://thumb-us.123doks.com/thumbv2/123dok_es/4984124.76325/23.612.218.394.352.475/figura-zona-de-cobertura-del-sistema-beidou-compass.webp)
![Figura 1.7 Órbita que describen los satélites QZSS [18]](https://thumb-us.123doks.com/thumbv2/123dok_es/4984124.76325/24.612.256.358.116.257/figura-orbita-que-describen-los-satelites-qzss.webp)
![Figura 2.5 Encapsulado del microcontrolador PIC32MX775F256H [4]](https://thumb-us.123doks.com/thumbv2/123dok_es/4984124.76325/35.612.240.392.276.429/figura-encapsulado-del-microcontrolador-pic-mx-f-h.webp)