Introducción al análisis lineal elástico
de estructuras mediante el método
de los elementos finitos
Dorian Luis Linero Segrera
Profesor Asociado Departamento de Ingeniería Civil y Agrícola Facultad de Ingeniería Universidad Nacional de Colombia
Diego Alexander Garzón Alvarado
Profesor Asociado Departamento de Ingeniería Mecánica y Mecatrónica Facultad de Ingeniería Universidad Nacional de Colombia
Angélica María Ramírez Martínez
Profesora Facultad de Ingeniería Fundación Universidad Central
Índice
Índice ... 1
Introducción ... 3
Capítulo 1 Elementos de la mecánica de sólidos para problemas lineales elásticos ... 5
1.1. Campos del desplazamiento y la deformación infinitesimal ... 5
1.2. Campo del esfuerzo ... 8
1.3. Ecuación constitutiva de un material lineal elástico isótropo: ley de Hooke . 9 1.4. Principio de los trabajos virtuales ...12
1.5. Planteamiento del problema en el medio continuo ...13
1.6. Elementos de la mecánica de sólidos para problemas bidimensionales ...14
Capítulo 2 Formulación del problema elástico lineal en estructuras formadas por barras ...19
2.1. Descripción del problema mecánico ...19
2.2. Elemento finito unidimensional lineal ...19
2.3. Matriz de rigidez y vector de fuerzas equivalentes del elemento finito ...22
2.4. Matriz de rigidez y vector de fuerzas equivalentes del sólido ...23
2.5. Ensamblaje de matrices de rigidez y de vectores de fuerzas equivalente ...25
2.6. Obtención de los desplazamientos nodales desconocidos del sólido ...27
2.7. Obtención de las deformaciones y esfuerzos en el interior de los elementos 28 2.8. Ejemplo de aplicación ...29
Capítulo 3 Formulación general del problema elástico lineal para sólidos ...35
Capítulo 4 Formulación del problema elástico lineal bidimensional mediante el método de los elementos finitos ...41
4.1. Formulación del problema elástico lineal bidimensional ...41
4.2. Elemento triangular lineal ...48
4.2.1. Función de aproximación y funciones de forma ...49
4.2.2. Matriz de operadores diferenciales actuando sobre funciones de forma y componentes de la deformación y el esfuerzo ...51
4.2.3. Matriz de rigidez ...53
4.2.4. Coordenadas de área de un triángulo ...54
4.2.5. Vector de fuerzas equivalentes a fuerzas de superficie y de cuerpo ...56
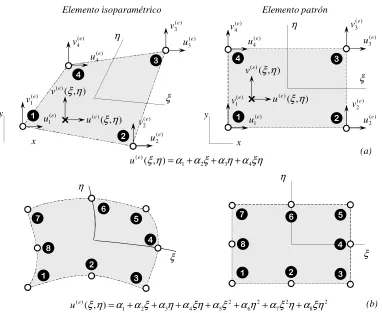
4.3. Elemento rectangular bilineal ...58
4.3.1. Funciones de aproximación y funciones de forma ...59
4.3.2. Matriz de operadores diferenciales actuando sobre funciones de forma y componentes de la deformación y del esfuerzo ...60
4.3.3. Presentación alternativa mediante submatrices por nudo ...61
4.3.4. Matriz de rigidez ...62
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
4.4. Esfuerzos y deformaciones iniciales ... 68
4.4.1. Deformaciones causadas por el cambio de la temperatura... 71
4.4.2. Esfuerzos y deformaciones iniciales en un elemento triangular lineal .... 72
4.4.3. Esfuerzos y deformaciones iniciales en un elemento rectangular bilineal 72 4.5. Técnicas de representación suave de la deformación y el esfuerzo ... 73
4.6. Algoritmo de cálculo ... 74
4.7. Aproximación de los elementos bidimensionales lineales a flexión pura.... 77
4.8. Elementos finitos bidimensionales de orden superior ... 78
Capítulo 5 Ejemplos de aplicación del método de los elementos finitos a problemas bidimensionales de elasticidad ... 81
5.1. Lámina sometida a tracción ... 81
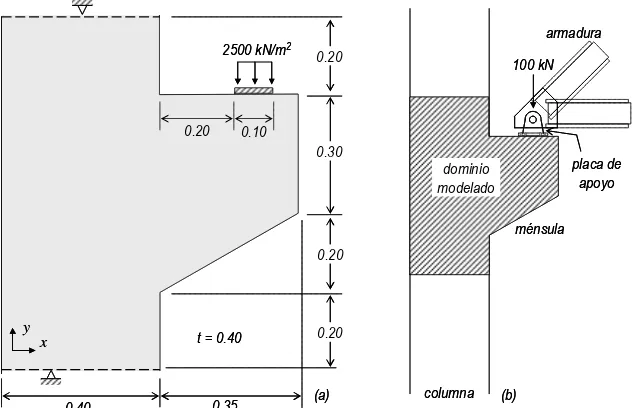
5.2. Ménsula de concreto sometida a una carga distribuida... 91
5.3. Principio de Saint Venant ... 95
5.4. Estructura de drenaje ... 97
Capítulo 6 Formulación del problema elástico lineal tridimensional mediante el método de los elementos finitos ... 101
6.1. Elemento tetraédrico de cuatro nudos ... 102
6.2. Otros elementos finitos tridimensionales ... 107
6.3. Ejemplos de aplicación ... 107
Capítulo 7 Formulación de placas estructurales delgadas mediante el método de los elementos finitos ... 113
7.1. Hipótesis básicas y clasificación de las placas estructurales ... 113
7.2. Teoría de placas de Kirchhoff ... 115
7.3. Función de aproximación del elemento finito no conforme... 123
7.4. Elemento de placa rectangular de cuatro nudos no conforme MZC... 124
7.5. Elemento de placa rectangular de cuatro nudos conforme BFS ... 137
7.6. Elemento finito de placa triangular no conforme CKZ... 138
7.7. Ejemplo de validación: deflexión en placas cuadradas ... 143
Capítulo 8 Formulación de cascarones estructurales mediante el método de los elementos finitos ... 149
8.1. Elemento finito triangular plano de cascarón ... 149
8.1.1. Transformación entre sistemas coordenados de las componentes de un vector 155 8.1.2. Transformación entre sistemas coordenados del elemento finito tipo cascarón 158 8.1.3. Matriz de rigidez global del elemento ... 160
8.1.4. Matriz rigidez de la estructura y cálculo de los desplazamientos desconocidos ... 161
8.1.5. Definición del sistema coordenado local del elemento finito triangular tipo cascarón ... 161
Introducción
Muchos de los problemas matemáticos de campo y de la mecánica del medio continuo des-critos en función de variables continuas, se pueden resolver mediante el método de los ele-mentos finitos, dividiendo el espacio y el tiempo del problema en pequeños subdominios e intervalos, que lo representan de forma aproximada y discreta. Por lo tanto, la variable sua-ve y continua que se desea obtener en el problema continuo, se reemplaza por la colección de funciones continuas exclusivamente en el interior de cada subdominio, las cuales son compatibles en su contorno.
El método de los elementos finitos es un procedimiento numérico que permite resolver problemas de la mecánica del continuo, entre otros, con una aproximación aceptable para ingeniería (Cook et al. 2001). En este procedimiento, el medio continuo se divide en un
número finito de subdominios denominados elementos finitos, conectados entre sí por
nu-dos, cuyo comportamiento responde a las ecuaciones de gobierno y a las condiciones de
borde (Zienkiewicz et al. 2005). El conjunto de elementos finitos y de nudos que
represen-tan aproximadamente la geometría del sólido se denomina malla de elementos finitos. En
mecánica de sólidos las ecuaciones de gobierno vinculan la cinemática, el modelo constitu-tivo del material y las condiciones de equilibrio, mientras que, las cantidades de interés corresponden al campo del desplazamiento, de la deformación y del esfuerzo en el sólido.
En las décadas del cuareta y cincuenta se desarrollaron técnicas para analizar placas a flexión, sustituyendo su comportamiento continuo por un sistema de barras elásticas some-tidas a carga axial, inicialmente de forma inductiva (Hrennikoff 1941, McHenry 1943) y más adelante mediante principios energéticos (Argyris 1955, Turner et al. 1956). Poco des-pués, Clough (1960) publicó la metodología general del método de los elementos finitos aplicable a sistemas discretos, obteniendo esfuerzos y deformaciones en sólidos. La geome-tría de tales sólidos era representada por elementos finitos triangulares, bajo las considera-ciones de material lineal elástico, estado plano de esfuerzos y deformación infinitesimal. Desde entonces, se han desarrollado diferentes tipos de elementos finitos, modelos constitu-tivos de materiales simples y compuestos, cinemáticas de pequeñas y grandes deformacio-nes, y metodologías de análisis no lineal en general (Crisfield 1991, Bonet & Wood 1997, Runesson 1999, Belytschko et al. 2000, Holzapfel 2000, Jirásek & Banzat 2002, Reddy 2004, Kojic & Bathe 2005, Zienkiewicz & Taylor 2005, Barbero 2008, de Souza et al. 2008).
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
implementación de cada tipo de formulación se ilustra mediante los ejemplos de aplicación incluidos al final de algunos capítulos.
Por lo tanto, este documento está dirigido a estudiantes de Ingeniería Civil, Ingeniería Mecánica, Maestría en Estructuras, Maestría en Geotecnia y Maestría en Mecánica, intere-sados en conocer el método de los elementos finitos como herramienta para calculo del estado de esfuerzos y de deformaciones de sólidos en general.
Capítulo 1
Elementos de la mecánica de sólidos para
problemas lineales elásticos
A continuación se describen los elementos de la mecánica clásica de sólidos en el marco de la mecánica del medio continuo que intervienen en la descripción del problema (Timoshenko & Goodier 1970, Spencer 1990, Mase & Mase 1999, Reddy 2008, Linero & Garzón 2010).
1.1.
Campos del desplazamiento y la deformación infinitesimal
Se define el campo vectorial del desplazamiento
[
]
Tw v u
=
) (x
u como el cambio de
posición de un punto material o partícula entre las configuraciones actual y de referencia,
ubicado en la posición
[
]
Tz y x
=
x de la configuración de referencia del sólido, como lo
ilustra la Figura 1.1(a).
En problemas bajo cargas estáticas monotónicas con material lineal elástico, la configu-ración de referencia o configuconfigu-ración no deformada establece la posición de cada partícula
del sólido en el instante de tiempo inicial t =0, es decir en el momento en que aún no se
han aplicado las cargas externas. En cambio, la configuración actual o configuración
de-formada describe la ubicación de cada partícula en el instante de tiempo presente t =t
des-pués de aplicadas la cargas externas.
Sea L la longitud de un segmento recto PQ trazado entre dos puntos materiales
denomi-nado línea material en la configuración de referencia y l la longitud de la misma línea en la
configuración actual (Figura 1.1(a)). La deformación longitudinal infinitesimal en esa
dirección se define como el alargamiento de una línea material dividida entre su longitud en
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
0 Ω
x
P
z
P
y
P
P
X
0
=
t
t
Ω
t t =
P
x P
Q
P L
Q l
P
dx x
dy dz
y
z
P x
y
z
du dv
dw x
y
z
x
P
z
P
y
P
) ( P
x u
0
=
t
t=t(a)
(b) Configuración de
referencia
Configuración actual
Configuración de referencia
Configuración actual Entorno diferencial
0 Ω
x
P
z
P
y
P
P
X
0
=
t
t
Ω
t t =
P
x P
Q
P L
Q l
P
dx x
dy dz
y
z
P x
y
z
du dv
dw x
y
z
x
P
z
P
y
P
) ( P
x u
0
=
t
t=t(a)
(b) Configuración de
referencia
Configuración actual
Configuración de referencia
Configuración actual Entorno diferencial
Figura 1.1. Configuración de referencia y configuración actual de un cuerpo.
En un entorno diferencial, una la línea material de longitud dx paralela al eje x en la
configuración de referencia se alarga una cantidad du como lo indica la Figura 1.1(b), de
tal forma que la deformación longitud en dirección x es igual a εxx =du dx. Siendo
u(x,y,z) la componente del desplazamiento en la dirección x función de la posición (x,y,z),
la componente de deformaciónεxx es igual a:
x u
xx
∂ ∂ =
ε (1.1)
De forma análoga, se obtienen las componentes de deformación longitudinal εyy y εzz
en las direcciones y y z, de la forma:
z w y
v
zz yy
∂ ∂ = ∂
∂
= ε
ε , (1.2)
Sean PQ y PR dos líneas materiales perpendiculares entre sí en un entorno diferencial
sobre el plano xy cuya longitud es dx y dy respectivamente, en la configuración de
referen-cia. En la configuración actual para un tiempo t, tales líneas cambian a los segmentos P’Q’
y P’R’, como lo indica la Figura 1.2. El ángulo formado entre las líneas materiales es
igual a π 2 en la configuración de referencia y se reduce a π 2−γxy en la configuración
actual. El ángulo γxy es igual a la suma de los ángulos (Q)
θ y (R)
θ mostrados en la Figura
1.2, los cuales son aproximadamente iguales a tanθ(Q) =dv dx y tanθ(R) =du dy
respec-tivamente, bajo la hipótesis de deformación infinitesimal. Siendo u(x,y,z) y v(x,y,z) las
componentes del desplazamiento en función de la posición, se define a γxy como la
Introducción al análisis lineal elástico de estructuras mediante el método de los elementos finitos 7
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
) (Q
θ
) (R
θ
dx
dv dy
du
x X, y
Y,
z Z,
(
x,y,z0,t0)
P
(
x y z t)
P′ , , ,
xy
γ
π 2− Q′
(
x,y,z0,t)
(
x y z t)
R′ , , 0,
(
x,y,z0,t0)
Q
(
x,y,z0,t0)
R
R P′ ′
Q P′ ′
dx dy
) (Q
θ
) (R
θ
dx
dv dy
du
x X, y
Y,
z Z,
(
x,y,z0,t0)
P
(
x y z t)
P′ , , ,
xy
γ
π 2− Q′
(
x,y,z0,t)
(
x y z t)
R′ , , 0,
(
x,y,z0,t0)
Q
(
x,y,z0,t0)
R
R P′ ′
Q P′ ′
dx dy
x v y u
xy
∂ ∂ + ∂ ∂ =
γ (1.3)
De manera similar, se obtienen las deformaciones angulares ingenieriles γxz y γyz en
los planos xz y yz respectivamente, de la forma:
y w z v x
w z u
yz xz
∂ ∂ + ∂ ∂ = ∂
∂ + ∂ ∂
= γ
γ , (1.4)
Figura 1.2. Configuración de referencia y configuración actual de dos líneas materiales
perpendi-culares en un entorno diferencial.
Las tres componentes de deformación longitudinal en las direcciones x, y y z, y las tres
componentes de deformación angular ingenieril en los planos xy, xz y yz definen el estado
de la deformación infinitesimal de un punto material ε(x), el cual se puede expresar como
una matriz columna de la forma:
[
]
Tyz xz xy zz yy
xx ε ε γ γ γ
ε
=
)
(x
ε (1.5)
Por lo tanto, el campo de la deformación en notación ingenieril se puede expresar de
forma matricial como el operador diferencial ∇~ actuando sobre el campo del
desplaza-miento u(x), es decir:
∂ + ∂
∂ + ∂
∂ + ∂
∂ ∂ ∂
=
∂ ∂
∂ ∂
∂ ∂
∂ ∂ ∂
=
→ ∇
=
w v
w u
v u
w v u
w v u
y z
x z
x y
z y x
y z
x z
x y
z y x
yz xz xy zz yy xx
0 0
0 0 0
0 0
0 0
) ( ~ ) (
γ γ γ ε ε ε
x u x
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
x
y
z
xx
σ
xy
σ
xz
σ
yx
σ
yz
σ
yy
σ
zx
σ
zz
σ
zy
σ
x
y
z
xx
σ
xy
σ
xz
σ
yx
σ
yz
σ
yy
σ
zx
σ
zz
σ
zy
σ
Siendo,
∂ ∂
∂ ∂
∂ ∂
∂ ∂ ∂
= ∇
y z
x z
x y
z y x
0 0
0 0 0
0 0
0 0
~
(1.7)
1.2.
Campo del esfuerzo
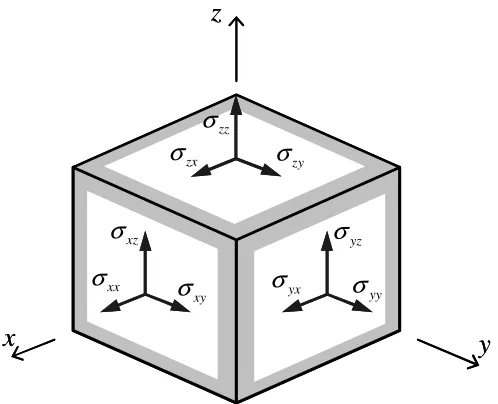
Como se indica en la Figura 1.3, el estado de esfuerzos en un punto material está definido
por las tres componentes de esfuerzo normal σxx,σyy,σzzen las direcciones x, y y z,
respec-tivamente y por las tres componentes de esfuerzo cortante σxy,σxz,σyz en los planos xy, xz
[image:10.612.153.402.375.577.2]y yz, correspondientemente.
Figura 1.3. Componentes de esfuerzo en un punto material.
Las componentes del estado de esfuerzos de un punto material σ(x) se pueden expresar
en una matriz columna de la forma:
[
]
Tyz xz xy zz yy
xx σ σ σ σ σ
σ
=
)
(x
Introducción al análisis lineal elástico de estructuras mediante el método de los elementos finitos 9
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
(a)
E
ε
N
σ
E
1
(b)
γ τ
G 1
(a)
E
ε
N
σ
E
1
(b)
γ τ
G 1
(b)
γ τ
G 1
1.3.
Ecuación constitutiva de un material lineal elástico
isótro-po: ley de Hooke
La ley de Hooke establece una relación lineal entre el esfuerzo normal y la deformación
longitudinal en la misma dirección como lo indica la Figura 1.4(a), siendo la constante de
proporcionalidad entre el esfuerzo y la deformación E, un parámetro del material
denomi-nado módulo de elasticidad o módulo de Young. De igual forma, la ley de Hooke para cortante establece una relación lineal entre el esfuerzo cortante y la deformación angular
ingenieril en un plano específico, como lo indica la Figura 1.4(b), cuya constante de
pro-porcionalidad G es otro parámetro del material denominado modulo de elasticidad a
cortan-te y decortan-terminado de la forma:
) 1 (
2 +ν
= E
G (1.9)
El esfuerzo de tracción actuante sobre la probeta produce un alargamiento en la direc-ción axial acompañado de una contracdirec-ción transversal o perpendicular a la direcdirec-ción del esfuerzo. En materiales elásticos lineales isótropos, la deformación lateral asociada a la contracción transversal es proporcional a la deformación axial asociada al alargamiento longitudinal. El cociente entre la deformación en la dirección lateral y la deformación en
la dirección axial se conoce como relación de Poisson ν y se define como:
axial lateral
ε ε
ν=− (1.10)
Figura 1.4. Ley de Hooke en el campo unidimensional: (a) relación esfuerzo normal vs.
Deforma-ción longitudinal, (b) relaDeforma-ción esfuerzo cortante vs. deformaDeforma-ción angular.
Sea un paralelepípedo diferencial unitario de lados paralelos a los ejes coordenados xyz
sometido exclusivamente a un esfuerzo normal σxx en la dirección x mostrado en la Figura
1.5(a). La deformación longitudinal en la dirección x es igual a εxx =σxx E, mientras que
la deformación lateral dada en las direcciones y y z corresponde a εyy =εzz =−νσxx E.
De la misma manera, si el elemento diferencial está sometido a un esfuerzo normal σyy
direc-© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
(a)
xx
σ y
x z
xx
ε
yy
σ
xx
ε
zz
σ
1 1
1
yy
ε
zz
ε
zz
ε
yy
ε
yy
ε
xx
ε
zz
ε
(b) (c)
(a)
xx
σ y
x z
y
x z
xx
ε
yy
σ
xx
ε
zz
σ
1 1
1
yy
ε
zz
ε
zz
ε
yy
ε
yy
ε
xx
ε
zz
ε
(b) (c)
ción del esfuerzo será εyy =σyy E y la deformación lateral en las direcciones x y z es igual
a εxx =εzz =−νσyy E. Si ahora actúa un esfuerzo normal σzz sobre el elemento
diferen-cial como se ilustra en la Figura 1.5(c), la deformación longitudinal en la misma dirección
es igual a εzz =σzz E y la deformación lateral en las direcciones x y y corresponde a
E
zz yy
xx ε νσ
ε = =− .
Figura 1.5. Deformaciones longitudinales en un elemento diferencial cuando actúa un esfuerzo
normal: (a) en dirección x, (b) en dirección y, (c) en dirección z.
Considerando que los esfuerzos cortantes solo producen deformaciones angulares, las deformaciones longitudinales obtenidas de la acción de los esfuerzos normales son iguales a:
(
)
(
)
(
xx yy zz)
zz
zz yy xx yy
zz yy xx xx
E E E
σ νσ νσ ε
νσ σ νσ ε
νσ νσ σ ε
+ − − =
− + − =
− − =
1 1 1
(1.11)
Despejando las componentes de esfuerzo normal de la expresión anterior se obtiene las siguientes ecuaciones:
[
]
[
]
[
xx yy zz]
zz
zz yy xx
yy
zz yy xx xx
E E E
ε ν νε
νε ν ν
σ
νε ε ν νε
ν ν
σ
νε νε ε ν ν
ν σ
) 1 ( )
2 1 )( 1 (
) 1 ( )
2 1 )( 1 (
) 1 ( ) 2 1 )( 1 (
− + + −
+ =
+ −
+ −
+ =
+ + −
− + =
(1.12)
Por otro lado, la deformación angular ingenieril en el plano xy es proporcional al
esfuer-zo cortante en dicho plano de la forma γxy =σxy G. De igual manera, se obtienen las
Introducción al análisis lineal elástico de estructuras mediante el método de los elementos finitos 11
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013 G
G G
yz yz xz
xz xy
xy
σ γ σ
γ σ
γ = , = , = (1.13)
Despejando las componentes de esfuerzo cortante y sustituyendo la Ecuación (1.9) se tiene que:
yz yz
xz xz
xy xy
E E
E
γ ν σ
γ ν σ
γ ν σ
) 1 ( 2 ,
) 1 ( 2 ,
) 1 (
2 + = + = +
= (1.14)
Las seis expresiones dadas en las ecuaciones (1.12) y (1.14) se pueden escribir de forma matricial como:
− −
− −
− −
− + =
yz xz xy zz yy xx
yz xz xy zz yy xx
sim E
γ γ γ ε ε ε
ν ν
ν ν
ν ν
ν ν
ν
ν ν
σ σ σ σ σ σ
) 2 1 (
0 )
2 1 (
0 0
) 2 1 (
0 0
0 )
1 (
0 0
0 )
1 (
0 0
0 )
1 (
) 2 1 )( 1 (
2 1 2
1 2
1
(1.15)
De acuerdo a lo anterior, se define la matriz constitutiva de un material elástico lineal
isótropo D como:
− −
− −
− −
− + =
) 2 1 (
0 ) 2 1 (
0 0
) 2 1 (
0 0
0 )
1 (
0 0
0 )
1 (
0 0
0 )
1 (
) 2 1 )( 1 (
2 1 2
1 2
1
ν ν
ν ν
ν ν
ν ν
ν
ν ν
sim E
D
(1.16)
y por lo tanto, la ecuación constitutiva será de la forma:
ε D
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
Γ
V
x
y
z
bdS
p
Γ
Γ
t t =
) , (xn t f
) (x n
) , ( ) ,
(x t u x t
u = ∗ ∀x∈Γu
p
Γ ∈ ∀x ) , (x t p
0
=
t
f n∈Γ
∀x
dV
ΓV
x
y
z
bdS
p
Γ
Γ
t t =
) , (xn t f
) (x n
) , ( ) ,
(x t u x t
u = ∗ ∀x∈Γu
p
Γ ∈ ∀x ) , (x t p
0
=
t
f n∈Γ
∀x
dV
1.4.
Principio de los trabajos virtuales
La posición de todas las partículas de un cuerpo material en un instante de tiempo se
deno-mina configuración. Se definen como configuraciones admisibles al conjunto de
configu-raciones que satisfacen las condiciones de borde cinemáticas de un cuerpo. De todas las
configuraciones admisibles, solo una de ellas, denominada configuración verdadera,
res-ponde a la condición de equilibrio de un cuerpo sometido a fuerzas reales.
Las configuraciones admisibles están restringidas a la vecindad de la configuración
ver-dadera, por lo tanto se obtienen de variaciones infinitesimales o simplemente variaciones
de dicha configuración. Las variaciones dadas por las configuraciones admisibles que además cumplen con las condiciones de equilibrio en un cuerpo material se denominan
desplazamientos virtuales. Tales desplazamientos corresponden a valores arbitrarios
mien-tras actúan valores fijos de las fuerzas reales en el cuerpo.
En cuerpos deformables, el trabajo virtual hecho por las fuerzas reales se puede dividir
en dos partes: el trabajo virtual hecho por las fuerzas internas denominado trabajo virtual
interno y el trabajo virtual realizado por las fuerzas externas llamado trabajo virtual ex-terno (Oñate & Zárate 1995).
Sea un sólido de volumen V y de superficie de contorno Γ, sujeto a fuerzas de cuerpo
por unidad de volumen b, a fuerzas de superficie por unidad de área p y a fuerzas puntuales
)
(xn
f aplicadas sobre el contorno (Γp∪Γf)⊂Γ, como lo indica la Figura 1.6. Las
con-diciones de borde sobre el cuerpo corresponden a valores conocidos del desplazamiento
real ∗
=u
u en los puntos materiales que hacen parte de un contorno definido Γu ⊂Γ.
Figura 1.6. Sólido sometido a acciones externas.
El campo del desplazamiento virtual
[
]
Tw v
u δ δ
δ
δu(x)= , definido como una
varia-ción del desplazamiento, corresponde a una funvaria-ción cualquiera que cumple con la condi-ción de borde de la forma:
u
Γ ∈ ∀ =0 x x
u( )
Introducción al análisis lineal elástico de estructuras mediante el método de los elementos finitos 13
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
El trabajo virtual externo, es aquel realizado por las fuerzas reales externas b, p y )
(xn
f mientras se presenta un desplazamiento virtualδu. En cambio, el trabajo virtual
interno es el trabajo realizado por el esfuerzo σ mientras ocurren deformaciones generadas
por desplazamientos virtuales ∇~δu, es decir, es igual a la densidad de energía de
deforma-ción (∇~δu)Tσintegrada en el volumen del sólido.
El principio de los trabajos virtuales establece que un cuerpo está en equilibrio si y solo
si, el trabajo virtual realizado por todas las acciones internas y externas es nulo, es decir:
∑
∫
∫
∫
= Γ
+ +
= ∇
r n
n T n V
T T
V
T
dV dS
dV
p 1
) ( ) ( )
~
( δu σ δu p δu b δu x f x (1.19)
donde δu(xn) y f(xn) son los vectores de desplazamiento virtual y de fuerza puntual de
una partícula ubicada en la posición xn. El parámetro r indica el total de puntos materiales
donde se aplica una fuerza puntual.
La ecuación anterior es válida para todo campo de desplazamientos virtuales que cum-pla con las condiciones de borde cinemáticas dadas en la Ecuación (1.18). Los vectores de
fuerzas puntuales f(xn), de fuerzas de superficie p y de fuerzas de cuerpo b son de la
for-ma:
[
]
[
]
[
]
Tz y x T
z y x
T z y x n
b b b p
p p
f f f
= =
=
b p
x f
, ) (
(1.20)
1.5.
Planteamiento del problema en el medio continuo
El problema del comportamiento mecánico de un sólido sometido a acciones externas se plantea de la siguiente manera:
Obtener el campo de los desplazamientos u(x) para todo punto material en la posición
x que pertenece al dominio del sólido V, el cual cumple con las condiciones de borde
∗
=u x
u( ) en todo x contenido en un contorno definido Γu ⊂Γ, y que además satisface la
relación deformación – desplazamiento expresadas en la Ecuación (1.6), la relación consti-tutiva del material indicada en la Ecuación (1.15) y las condiciones de equilibrio (esta últi-ma planteada mediante el principio de los trabajos virtuales en la Ecuación (1.19)).
Después de obtenido el campo de desplazamiento, se pueden calcular los campos de la deformación y del esfuerzo para todo punto material del sólido utilizando las expresiones (1.6) y (1.15).
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
z
xx
σ
xy
σ
yyσ
y
x
(c)
z
x y
(b) z
x y
(a)
x
b
x
p
y
p
y
b
x
f
y
f ) , (xn yn p
y x, )∈Γ
(
V y x, )∈
(
u v
) , (x y
z
xx
σ
xy
σ
yyσ
y
x
z
xx
σ
xy
σ
yyσ
y
x
(c)
z
x y
(b) z
x y
(b) z
x y
(a)
x
b
x
p
y
p
y
b
x
f
y
f ) , (xn yn p
y x, )∈Γ
(
V y x, )∈
(
u v
) , (x y
z x y
(a)
x
b
x
p
y
p
y
b
x
f
y
f ) , (xn yn p
y x, )∈Γ
(
V y x, )∈
(
u v
) , (x y
1.6.
Elementos de la mecánica de sólidos para problemas
bidi-mensionales
En algunos problemas donde el comportamiento mecánico es el mismo en los puntos mate-riales contenidos en diferentes planos perpendiculares, el dominio se puede simplificar a un espacio bidimensional. Por lo tanto los campos del desplazamiento, la deformación y el esfuerzo no dependen de la componente de la posición normal al plano donde están
conte-nidos, por ejemplo, si problema se simplifica a un plano xy, tales los campos son funciones
de la posición (x,y) e independientes de z.
Un sólido está en condición plana de esfuerzos en el plano xy como lo indican algunos
ejemplos en la Figura 1.7, si las componentes de esfuerzo fuera de dicho plano son nulas,
es decir:
0 ,
0 ,
0 = =
= xz yz
zz σ σ
σ (1.21)
y en consecuencia el campo de los esfuerzos se puede expresar mediante una matriz co-lumna de la forma:
[
]
Txy yy xx
y
x, )= σ σ σ
(
σ (1.22)
Figura 1.7. Sólido en condición plana de esfuerzos en el plano xy: (a) viga sometida a cargas
pun-tuales, presiones y de cuerpo, (b) lámina sometida a tensión, (c) estado de esfuerzos en un elemen-to infinitesimal.
Introducción al análisis lineal elástico de estructuras mediante el método de los elementos finitos 15
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
(
)
(
)
(
)
0 ,
0 ,
) 1 ( 2
, 1
, 1
= =
+ =
+ −
= +
− = −
=
yz xz
xy xy
yy xx zz
yy xx yy
yy xx xx
E
E E
E
γ γ
σ ν γ
σ σ ν ε
σ νσ ε
νσ σ ε
(1.23)
Despejando las componentes de esfuerzo de las expresiones anteriores, se puede obtener
la siguiente relación matricial σ=Dε entre las componentes de esfuerzo y de deformación
contenidas en el plano xy, para una condición plana de esfuerzos.
− −
=
xy yy xx
xy yy xx
E
γ ε ε
ν ν
ν
ν σ
σ σ
) 1 ( 0
0
0 1
0 1
1
2 1 2
(1.2 4)
donde la matriz constitutiva elástica para un estado plano de esfuerzos D y la matriz
co-lumna de las componentes de la deformación εcontenidas en el plano xy son iguales a:
=
− −
=
xy yy xx
E
γ ε ε
ν ν
ν
ν ε
D ,
) 1 ( 0
0
0 1
0 1
1
2 1 2
(1.2 5)
La componente de deformación longitudinal en dirección z se expresa mediante una
ecuación escalar adicional en función de las demás componentes de deformación longitudi-nal, de la forma:
(
xx yy)
zz ε ε
ν ν
ε +
− − =
1
(1.2 6)
Un sólido está en condición plana de deformaciones en el plano xy como se indica en la
Figura 1.8, si las componentes de deformación que no están contenidas en dicho plano son nulas, es decir:
0 ,
0 ,
0 = =
= xz yz
zz γ γ
ε (1.27)
y en consecuencia el campo de las deformaciones se puede expresar mediante una ma-triz columna de la forma:
[
]
Txy yy xx
y
x, )= ε ε γ
(
ε (1.28)
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
(a) z
x
y z εxx
y
x (b)
z
yy
ε
y
x (c)
z 12π−γxy
y
x (d)
(a) z
x y
(a) z
x
y z εxx
y
x
(b)
z εxx
y
x
(b)
z
yy
ε
y
x (c) z
yy
ε
y
x (c)
z 12π−γxy
y
x (d) z 12π−γxy
y
x (d)
[
]
[
]
[
]
0 ,
0 ,
) 1 ( 2
) 2 1 )( 1 (
) 1 ( )
2 1 )( 1 (
) 1 ( ) 2 1 )( 1 (
= =
+ =
+ −
+ =
− + −
+ =
+ −
− + =
yz xz
xy xy
yy xx zz
yy xx
yy
yy xx xx
E E E E
σ σ
γ ν σ
ε ε ν ν
ν σ
ε ν νε
ν ν
σ
νε ε ν ν
ν σ
(1.29)
A partir de las ecuaciones anteriores se puede expresar una relación matricial σ=Dε
entre las componentes de esfuerzo y de deformación contenidas en el plano xy, para una
condición plana de deformaciones de la forma:
− −
−
− + =
xy yy xx
xy yy xx
E
γ ε ε
ν ν
ν
ν ν
ν ν
σ σ σ
) 2 1 ( 0
0
0 )
1 (
0 )
1 (
) 2 1 )( 1 (
2 1
(1.3 0)
donde la matriz constitutiva elástica para un estado plano de deformaciones D y la
ma-triz columna de las componentes de la esfuerzo contenidas en el plano xy son iguales a:
=
− −
−
− + =
xy yy xx
E
σ σ σ
ν ν
ν
ν ν
ν
ν σ
D ,
) 2 1 ( 0
0
0 )
1 (
0 )
1 (
) 2 1 )( 1 (
2 1
(1.3 1)
Figura 1.8. Sólido en condición plana de deformaciones en el plano xy: (a) corte de espesor
Introducción al análisis lineal elástico de estructuras mediante el método de los elementos finitos 17
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
La componente de esfuerzo normal en dirección z se expresa mediante una ecuación
es-calar adicional en función de las demás componentes de esfuerzo normal, de la forma:
) ( xx yy zz ν σ σ
σ = + (1.3
2)
En general en problemas bidimensionales, solo se expresan las componentes contenidas
en el plano xy del desplazamiento, las fuerzas puntuales, de superficie y de cuerpo como lo
ilustra la Figura 1.7(a). Por lo tanto los vectores de desplazamiento para todo punto
mate-rial, una fuerza puntual en un punto (xn,yn), una fuerza de superficie en el contorno Γp y
la fuerza de cuerpo en todo punto material se expresan de la forma:
[
]
[
]
[
]
[
b b]
x y Vy x
y x p
p y x
y x f
f y x
V y x v
u y x
T y x
p T
y x
f n n T
y x n n
T
∈ ∀
=
Γ ∈ ∀
=
Γ ∈ ∀
=
∈ ∀
=
) , ( )
, (
) , ( )
, (
) , ( )
, (
) , ( )
, (
b p f
u
(1.33)
A partir de la Ecuación (1.6), la relación entre las componentes contenidas en el plano
xy de la deformación y del desplazamiento se expresa de la forma:
∂ + ∂
∂ ∂ =
∂ ∂
∂ ∂ =
→ ∇ =
v u
v u v
u
x y
y x
x y
y x
xy yy xx
0 0 ~
γ ε ε
u
ε (1.3
4)
donde el operador diferencial se reduce a:
∂ ∂
∂ ∂ = ∇
x y
y x
0 0
~ (1.3
Capítulo 2
Formulación del problema elástico lineal en
estructuras formadas por barras
La representación del comportamiento mecánico de algunos sistemas estructurales podría simplificarse, si se considera que la estructura está conformada por un grupo de barras prismáticas conectadas entre sí. Las barras son elementos estructurales que tienen una di-mensión sustancialmente mayor a las dimensiones de su sección transversal, la cual es habi-tualmente constante. En consecuencia, los esfuerzos sobre la sección transversal de cada barra son equivalentes a fuerzas y momentos internos actuando sobre su eje longitudinal.
Este capítulo presenta brevemente la aplicación del método de los elementos finitos a estructuras formadas por barras sometidas a fuerza axial (Weaver & Johnson 1984, Oñate 2009).
2.1.
Descripción del problema mecánico
El problema mecánico de una barra sometida exclusivamente a fuerza axial, cuyo material
es lineal elástico y su eje longitudinal es paralelo a x, se describe de la siguiente manera.
El campo del desplazamiento corresponde a la componente en dirección x del
despla-zamiento u(x) y se consideran despreciables las componentes en dirección y y z. En
con-secuencia, la única componente de la deformación diferente de cero es:
x u
xx =∂ ∂
ε (2.1)
Se establece que la única componente de esfuerzo de interés es el esfuerzo normal en
di-rección x, que para un material elástico lineal isótropo de módulo de Young E, es igual a:
xx xx Eε
σ = (2.2)
Siendo εxx independiente de la posición en y y en z, el esfuerzo σxx será constante en
sobre la sección transversal y equivalente al cociente entre la fuerza axial interna Fxx
ac-tuando sobre el eje longitudinal y el área de la sección A.
2.2.
Elemento finito unidimensional lineal
El dominio Ω de una barra sometida a fuerzas axiales como la mostrada en la Figura 2.1,
se simplifica a un espacio unidimensional
{
x∀x∈Ω}
, en el cual se pretende obtener elcampo del desplazamiento en dirección x, llamado u(x). Tal dominio se divide en
subdomi-nios Ω(e), donde Ω≅
∑
Ωne e
sub-© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
1 2 3
4 Ω1 Ω2
1 2 3
3
Ω
0
4 =
a
1
a
2
a
0
3=
a
elemento finito nudo
condición de borde
valor nodal de desplazamiento
(b)
) (
) 3 (
x u
) (
) 2 (
x u
) (
) 1 (
x u
desplazamiento en el interior del elemento 3 (a)
x
Ω
dominio es suave y continua, y además conserva el mismo valor en los lugares comunes
entre varios subdominios, es decir, u(x) es una función continua y por tramos en el dominio
Ω. Cada uno de los subdominios se denomina elemento finito y los puntos materiales
donde se conectan los subdominios entre sí, o un subdominio con el contorno de Ω, se
defininen como los nudos externos del elemento finito.
Figura 2.1. Barra sometida a fuerza axial: (a) geometría, condiciones de borde y cargas aplicadas,
(b) malla de elementos finitos y función de desplazamiento longitudinal.
La función de aproximación en el subdominio Ω(e) de un elemento finito de barra
some-tida a fuerza axial, corresponde al desplazamiento a lo largo de su eje longitudinal u(x).
Un elemento finito unidimensional lineal cuenta con una función de aproximación
polinó-mica de grado uno, es decir:
) ( 2
1
)
(x x x e
u =α +α ∀ ∈Ω (2.3)
donde los coeficientes α1,α2se denominan coordenadas generalizadas.
La función de aproximación también se puede expresar en términos de los valores del desplazamiento en lugares específicos dentro del elemento. En este tipo de elemento, se
definen los valores del desplazamiento ()
2 ) (
1 ,
e e
u
u en los extremos 1 y 2, respectivamente,
como se ilustra en la Figura 2.2. En consecuencia:
l l
u u u
Introducción al análisis lineal elástico de estructuras mediante el método de los elementos finitos 21
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
i j
e
) (e i
a a(je)
) (e i
f fj(e)
(b)
)
(x
u
i j
) (e i
a
) (e j
a
(a)
) (e
L
x
Figura 2.2. Elemento finito unidimensional lineal de barra sometida a fuerza axial: (a) el
despla-zamiento como función de aproximación, (b) despladespla-zamientos y fuerzas en los nudos.
Despejando las coordenadas generalizadas de las dos ecuaciones anteriores, se puede obtener una nueva expresión de la función de aproximación en términos de los valores no-dales, de la forma:
) ( 2 ) ( 1
1 )
( e e
a l x a l x x
u +
−
= (2.5)
Los lugares donde se evaluá la función de aproximación se identifican como los nudos
del elemento finito. Asimismo, los valores de la función de aproximación en los nudos se
denominan valores nodales.
Los coeficientes que multiplican a los valores nodales en cada sumando de la ecuación
anterior se llaman funciones de forma del elemento finito. Por lo tanto, Por lo tanto, las
funciones de forma de un elemento unidimensional lineal son:
l x x N l
x x
N e e
= −
=1 , ( )
)
( ( )
2 )
(
1 (2.6)
y la función de aproximación se puede reescribir como:
) ( 2 ) ( 2 ) ( 1 ) (
1 ( ) ( )
)
( e e e e
a x N a x N x
u = + (2.7)
La ecuación anterior se puede expresar de forma matricial como:
) ( )
( )
( ( )
)
( e
e
e x x
x
u =N a ∀ ∈Ω (2.8)
[
]
=
− =
= ( )
2 ) ( 1 ) ( )
( 2 ) ( 1 )
( ( ) 1 , e
e e
e e e
a a l
x l x N
N
x a
N (2.9)
donde N(e)(x) la matriz de funciones de forma y a(e) el vector de valores nodales del
desplazamiento del elemento e.
El elemento unidimensional lineal establece que la función de aproximación es el cam-po del desplazamiento longitudinal y los valores nodales son los desplazamientos en los
elemen-© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
tos finitos, el desplazamiento será una función continua por tramos, mientras que ∂xu(x)
será discontinua en cada nudo común a dos elementos. Los elementos con esta
característi-ca se denominan elementos finitos de continuidad C0.
Sustituyendo las ecuaciones (2.8) y (2.9), en la relación entre la deformación y el des-plazamiento presentada en la Ecuación (2.1), se tiene que:
) ( ) ( ) ( )
(e ( ) e e e
xx x
xN a =B a
∂ ∂ =
ε (2.10)
Definiendo el operador diferencial para este tipo de problemas como el escalar
x
∂ ∂ =
∇~ , la matriz de operadores diferenciales actuando sobre funciones de forma de un
elemento unidimensional lineal será igual a:
[
]
1[
1 1]
) ( ~ )
( ( )
1 )
( 1 )
( )
( =∇ = ∂ ∂ = −
l N N
x
x x e
e x e
e N
B (2.11)
La relación constitutiva entre la componente de esfuerzo normal y la deformación
longi-tudinal en dirección x indicada en la Ecuación (2.2), muestra que la matriz constitutiva
elás-tica lineal de la Ecuación (1.16) se simplifica para problemas unidimensionales, siendo
E
=
D . Sustituyendo la Ecuación (2.8) en la Expresión (2.2) se obtiene:
) ( )
(e e
xx =EB a
σ (2.12)
2.3.
Matriz de rigidez y vector de fuerzas equivalentes del
ele-mento finito
La Ecuación (1.19) que describe al Principio de los Trabajos Virtuales en un sólido, presen-tada en el Apartado 1.4, se puede simplificar para el problema de una barra de sección
transversal A, sometida a fuerza axial de la forma:
∑
∫
∫
= Ω
Ω
+ =
∇
r n
n T n x
T xx
T
x f x u dx
A b u dx A u
1
) ( ) ( )
~
( δ σ δ δ (2.13)
La barra se divide en un grupo de ne elementos finitos conectados entre sí por nn nudos,
como lo ilustra la Figura 2.1(b), por lo tanto el dominio Ω=
∑
1neΩ(e)y la expresiónante-rior se puede escribir de la forma:
∑
∑ ∫
∑ ∫
=
= Ω
= Ω
+
=
∇
nn n
n T n ne
e
e x T ne
e
e xx T
x f x u dx
A b u dx
A u
e
e 1 1
) ( 1
)
( ( ) ( )
) ~ (
) ( )
(
δ δ
σ
δ (2.14)
El desplazamiento virtual en el interior del elemento finito T
u u δ
δ = se define de la
misma forma que el desplazamiento real indicado en la Ecuación (2.8), como:
T e T
e
u δa( )N( )
Introducción al análisis lineal elástico de estructuras mediante el método de los elementos finitos 23
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
donde δa(e) es el vector de desplazamientos virtuales nodales del elemento e.
Asimismo, el operador diferencial actuando sobre la deformación virtual será igual a:
T e T
e T
e T
e T
u) ( )~ ( ) ( ) ( ) ~
(∇δ =δa ∇N =δa B (2.16)
Sustituyendo las ecuaciones (2.10), (2.15) y (2.16) en la expresión (2.14), se obtiene que:
f a N
a a
B B
a T
ne e
e x T
e T
e ne
e
e e e e T
e T
e
e e
dx A b dx
A
E δ δ
δ +
=
∑
∫
∑
∫
= Ω
= Ω 1
) ( ) ( ) ( 1
) ( ) ( ) ( ) ( ) ( ) (
) ( )
(
(2.17)
Los términos entre corchetes de la ecuación anterior se definen como la matriz de
rigi-dez (e)
K y el vector de fuerza equivalente a la carga distribuida f(e) del elemento finito de
barra sometida a fuerza axial, es decir:
∫
∫
Ω Ω
= =
) ( )
(
) ( ) ( )
( )
( ) ( ) ( ) ( )
( ,
e e
dx A b dx
A
E x e
T e e
e e e T
e e
N f
B B
K (2.18)
En particular, para el elemento unidimensional lineal cuyas matrices N(e) y B(e) están
expresadas en (2.9) y (2.11), la matriz de rigidez y el vector de fuerzas equivalente es igual a:
− − =
=
1 1
1 1
) (
) ( ) ( ) ( ) (
) ( ) ( ) (
e e e e
jj e ji
e ij e ii e
L A E k
k k k
K (2.19)
=
=
1 1
) ( 2 1 ) (
) ( ) (
e x e
j e i e
L w f
f
f (2.20)
considerando que la fuerza distribuida por unidad de longitud es contante en x e igual a
) (e x x b A
w = .
2.4.
Matriz de rigidez y vector de fuerzas equivalentes del
sóli-do
El Principio de los Trabajos Virtuales presentado en la Ecuación (2.17), se puede escribir
en términos de las matrices elementales (e)
K y f(e), de la forma:
) ( 1
) ( ) ( 1
) ( ) ( ) (
n T ne
e
e T
e ne
e
e e T
eK a a f a f
a δ δ
δ −
∑
=∑
= =
(2.21)
donde δa y (n)
f corresponden a los vectores de desplazamiento virtual y de fuerzas
reales en los nudos de la malla de elementos finitos. Las matrices de la ecuación anterior
© D. L. Linero, D. Garzón-Alvarado & A. Ramirez-Martínez – Universidad Nacional de Colombia, 2013
=
=
=
= ()
) ( ) ( )
( ) (
) ( ) ( ) ( )
( ) (
) ( )
( ) (
)
( , , , e
j e i e e
jj e ji
e ij e ii e e
j e i e
e j
e i e
f f k
k k k a
a a
a
f K
a a
δ δ
δ (2.22)
=
=
) ( 4 ) ( 3 ) ( 2 ) ( 1
) (
4 3 2 1
,
n n n n n
f f f f
a a a a
f a
δ δ δ δ
δ (2.23)
donde los subíndices i y j están asociados a los nudos en los extremos de cada elemento.
Además, se define el vector de desplazamientos nodales de la malla de elementos finitos como:
=
4 3 2 1
a a a a
a (2.24)
donde cada coeficiente corresponde al desplazamiento de un nudo específico. Por lo
tanto, el desplazamiento del nudo inicial del elemento 1 es (1) 4
a
ai = y el desplazamiento del
nudo final corresponde a (1) 1
a
aj = . Asimismo, para el elemento 2 los desplazamientos
noda-les son (2) 1
a
ai = y (2) 2
a
aj = , y para el elemento 3, (3) 2
a
ai = y (3) 3
a
aj = . El identificador del
desplazamiento o grado de libertad en los nudos de cada elemento finito se organiza en la Tabla 2.1, denominada tabla de incidencias, en la cual las columnas XGI y XGJ contienen
al identificador del desplazamiento en el nudo i y en el nudo j del elemento.
ELE XGI XGJ
1 004 001
2 001 002
3 002 003
Tabla 2.1. Ejemplo de barra sometida a fuerza
axial. Tabla de incidencias.
La primera sumatoria de la Ecuación (2.21) se puede escribir de forma extendida al total
de grados de libertad de la malla sin modificar su resultado, cambiando al vector δa(e) por
el vector de desplazamientos nodales virtuales de la malla δa, al vector a(e) por el vector
de desplazamientos nodales virtuales de la malla a, y a la matriz (e)
K por una matriz de
rigidez extendida (e)
ext