Evaluación de criterios de diseño en devanados de Máquinas Eléctricas de C A 3ø
123
0
0
Texto completo
(2) Este documento es Propiedad Patrimonial de la Universidad Central “Marta Abreu” de Las Villas, y se encuentra depositado en los fondos de la Biblioteca Universitaria “Chiqui Gómez Lubián” subordinada a la Dirección de Información Científico Técnica de la mencionada casa de altos estudios. Se autoriza su utilización bajo la licencia siguiente: Atribución- No Comercial- Compartir Igual. Para cualquier información contacte con: Dirección de Información Científico Técnica. Universidad Central “Marta Abreu” de Las Villas. Carretera a Camajuaní. Km 5½. Santa Clara. Villa Clara. Cuba. CP. 54 830 Teléfonos.: +53 01 42281503-1419.
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Eléctrica, autoriza que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. ________________ Firma del Autor.. Los abajo firmantes certifican que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. ____________ Autor.. _______________ Firma del Firma del Jefe de Departamento donde se defiende el trabajo.. ___________________ Firma del Responsable Información Científico – Técnica.
(4) PENSAMIENTO Es justamente la posibilidad de realizar un sueño lo que hace que la vida sea interesante. Paulo Coelho.
(5) DEDICATORIA A mis padres por haberme traído a este mundo y hacer de mi di la persona que soy hoy en día. A mis padrinos por apoyarme siempre, y sentirse orgullosos con mis logros. A Patricia por su amor incondicional..
(6) AGRADECIMIENTOS Por su amor sin límites, por estar siempre a mi lado y creer siempre en mí: a mi madre Sailys y mi padre Alexis. Por todos los momentos que compartimos juntos, su amor y paciencia: a Patricia. Por su apoyo incondicional y por formar parte de mi vida: a mis padrinos Yipsy y Rudis. Por toda su ayuda y dedicación para la realización de este Trabajo Diploma: A mis tutores Miriam y Alicia. Por toda su ayuda en realización de esta tesis: a los compañeros Valentín y Tomás Alberto. Por ser parte de mi vida de una forma tal especial: a mis hermanas Llilian, Alejandra, Katerinne y la más pequeña, Alexia. Por los buenos momentos compartidos a lo largo de estos cinco años y las amistades logradas: a mis compañeros de aula. Por sus conocimientos y consejos que influyeron en mi formación como Ingeniero Eléctrico: A todos los profesores de la facultad. A todos aquellos que no he mencionado pero que de una forma u otra han formado parte de mi vida y hecho posible la realización de este sueño. ¡Muchas gracias!.
(7) RESUMEN A partir de la experiencia adquirida de la explotación de las máquinas eléctricas de inducción se conoce que sus partes más vulnerables son los rodamientos y devanados, estos elementos son causa de más del 75% de los trabajos de reparación y mantenimiento. Para preservar el medio ambiente y los recursos naturales, se impone ahorrar y por tanto reparar o modificar todo aquello que lo permita y sea logrado relativamente económico, como son los motores asincrónicos dañados. Esta tarea se realiza en talleres especializados, donde el enrollador experimentado realiza una copia a partir de un cuidoso desarme y toma de datos. Pero se da el caso, que se requiere una modificación de esos devanados por cambios de tensión, polos, disponibilidad de materiales y ahí surge la necesidad de un recálculo que permita garantizar buenas características de explotación del motor. En este trabajo después de realizada una búsqueda bibliográfica teórica y un levantamiento físico, en motores que fueron reparados, con vista a puntualizar variables medulares en los cálculos y verificar cuales son los tipos de devanados más utilizados en la práctica y sus características, se propone una metodología para el recálculo de los devanados de motores inducción 3ø de rotor jaula de ardilla, que integre los criterios científicos y prácticos, que posibilite la obtención de un conjunto de alternativas para los devanados de armadura y la selección de variables electromagnéticas. Como resultados se plantea la metodología de recálculo y colateralmente se obtiene una base de datos prácticos, que permite evaluar relaciones fundamentales entre algunas variables electromagnéticas, el paso de bobina, tipo de devanado. Se logra un análisis más completo de las variantes constructivas de los devanados, no abordados anteriormente, cuales se utilizan en la práctica y si tiene o no relación con la potencia del motor. Palabras Clave: máquina asincrónica, recálculo de devanados, electromagnéticas de diseño, devanados en máquinas eléctricas de CA.. variables.
(8) GLOSARIO A – carga lineal [A-conductor/cm] a – ramas en paralelo Ad – área total de los dientes bajo el polo [mm²] Ay – área del yugo [mm²] B – densidad de flujo o inducción magnética [ Wb/m2] [T] ba – grosor del aislamiento entre los conductores y la pared de la ranura [mm] Bd – inducción en el diente del estator [T] bg – bobinas por grupos [bobinas/grupos] Bmáx – valor máximo de la inducción [T] Bmed – valor medio de la inducción [T] bn – ancho mínimo del diente [mm] br – base de la ranura [mm] bs – grosor del separador entre capas [mm] bsr – base superior de la ranura [mm] By – inducción en el yugo del estator [T] CA – Corriente alterna Ce – conductores elementales (cantidad de hilos) [hilos] cx – conexión cxp – conexiones paralelas dab - distancia de la abertura de la ranura [mm] dc – diámetro de un conductor [mm] De1 – diámetro exterior del estator [mm] Di1 – diámetro interior del estator [mm] f1 – frecuencia de la tensión aplicado [Hz] FMM – Fuerza magnetomotriz Fu – factor de utilización o llenado de la ranura. i.
(9) g – grupos [grupos] hc – altura de la cuña o perfil [mm] hr – altura de la ranura y el diente [mm] hy – altura del yugo [mm] J – densidad de corriente [A/mm2] Ka – factor de corrección Kc – coeficiente de apilamiento (0,92 a 0,98 en función del tipo de aislamiento) Kd – factor de distribución Kp – factor de paso Kv – caída de tensión para la ecuación de tensión Kw – Factor de devanado L1 – longitud total axial del estator [mm] n – número de bobina por polo por fase n – número de bobinas por polo [bobinas/polo] N1 – número de vueltas en serie por fase [vueltas serie/fase] Nb – vueltas por bobina [vueltas/bobina] Nr – número de conductores por ranura [conductores/ranura] Ø - flujo por polo [Wb] p – número de polos [polos] q – número de fases [fases] S1 - número de ranuras del estator [ranuras] Sa – área de un conductor aislado en la ranura [mm²] Sd – área del conductor desnudo [mm²] Sr – área de la ranura neta [mm²] Sra – área de la ranura aprovechable [mm²] Ʈp – paso polar [mm] [ranuras] V – orden del armónico V1 – voltaje de fase [V] Yf – ángulo entre fases [ranuras] Yp – paso de bobinas [ranuras] ii.
(10) Ypf – ángulos entre polos consecutivos de una misma fase [ranuras] Z - número de bobinas del devanado [bobinas] Zf - número de bobinas por fase [bobinas/fase] Zfp - número de bobinas por fase por polo [bobinas/fase/polo] β - fracción de paso reducido ℓ - paso de bobina [o eléctricos] Ƴ - ángulo entre ranuras [º]. iii.
(11) ÍNDICE. GLOSARIO ............................................................................................................................................. i INTRODUCCIÓN ................................................................................................................................... 1 CAPÍTULO 1. Aspectos fundamentales para el recálculo de los devanados ....................................... 7 1.1 Generalidades ........................................................................................................................... 8 1.2 Características del campo magnético y la FMM en motores de inducción 3ø ......................... 9 1.3 Tipos de motores de inducción 3ø .......................................................................................... 10 1.3.1 Motores de rotor bobinado ............................................................................................. 11 1.3.2 Motor de jaula de ardilla .................................................................................................. 11 1.4 Características constructivas ................................................................................................... 13 1.4.1 Carcasa ............................................................................................................................. 13 1.4.2 Núcleo del estator ............................................................................................................ 14 1.4.3 Tipos y características de ranuras y dientes..................................................................... 15 1.5 Devanados en máquinas de CA 3ø .......................................................................................... 15 1.5.1 De acuerdo al número de capas o lados de bobinas por ranura ..................................... 20 1.5.2 Tipos de devanados de acuerdo al número de bobinas/polo .......................................... 21 1.5.3 Devanados de acuerdo al número grupos y su interconexión ......................................... 26 1.5.4 Tipos de devanados de acuerdo a la forma de las bobinas/polo ..................................... 29 1.5.5 Selección del conductor y construcción de las bobinas ................................................... 37 1.6 Aislamientos ............................................................................................................................ 39 1.6.1 Clases de aislamiento y tipos de materiales .................................................................... 40 1.7 Conclusiones parciales ............................................................................................................ 41 Capítulo 2: Metodología para el recálculo de motores 3ø de inducción .......................................... 42 2.1 Recopilación y análisis de datos prácticos de motores asincrónicos 3ø ................................. 43 2.2 Valores de diferentes parámetros para el recálculo ............................................................... 48 2.3 Metodología para el recálculo ................................................................................................ 53 2.4 Conclusiones parciales ............................................................................................................ 68 Capítulo 3: Aplicación informática y resultados................................................................................ 70 3.1 Aplicación informática de cálculo de motores 3ø de inducción ............................................. 70 3.2 Validación del programa con un ejemplo de referencia ......................................................... 76 3.3 Resultados ............................................................................................................................... 77 3.4 Conclusiones parciales ............................................................................................................ 81.
(12) CONCLUSIONES ................................................................................................................................. 82 RECOMENDACIONES ......................................................................................................................... 83 Referencias Bibliográficas ................................................................................................................. 84 ANEXOS.
(13) INTRODUCCIÓN. El fenómeno de la electricidad ha sido estudiado desde la antigüedad, pero de forma científica y sistemática comenzó en los siglos XVII y XVIII. A finales del siglo XIX los ingenieros lograron aprovecharla para uso doméstico e industrial. La rápida expansión de la tecnología eléctrica la convirtió en la columna vertebral de la sociedad industrial moderna. Precisamente el motor eléctrico fue la principal forma de trabajo mecánico producto de la conversión de la energía eléctrica. Por su amplia utilización se puede encontrar tanto en la vida cotidiana del hogar, en el ámbito profesional, pequeños talleres y en la industria. Es de gran utilidad y en cuanto a su función se puede considerar irremplazable. Las principales ideas de los motores de inducción o asincrónicos se desarrollaron a finales de la década de los años ochenta, en el siglo XIX por Nicola Tesla, que se le otorgó la patente por sus ideas en 1888. En aquel tiempo presentó un escrito al American Institute of Electrical Engineers (AIEE precursor del actual IEEE), en el cual describía los principios básicos del motor de inducción de rotor devanado junto con las ideas para otros dos importantes motores de corriente alterna (CA): el motor sincrónico y el motor de reluctancia. La idea básica del motor de inducción se describió en 1888, posteriormente comenzó su uso. Hubo un período inicial de rápido desarrollo seguido de una serie de lentos y evolucionados progresos que aún, hoy en día continúan. La forma actual del motor de inducción se logró entre 1888 y 1895. Durante este periodo se desarrollaron fuentes de energía eléctrica de dos y tres fases, para producir los campos magnéticos giratorios en el motor; los estatores con devanados distribuidos, así como los rotores de jaula de ardilla. A partir de 1896 los motores de inducción completamente funcionales estuvieron disponibles en el mercado. Desde entonces hasta los del año 1970, continúo la mejora de la calidad del acero, las técnicas de fundición, los aislamientos y las características de construcción de los motores de inducción. Estas tendencias dieron como resultados motores más pequeños para una determinada potencia de salida, con una considerable economía en los costos de producción. Estos adelantos en el diseño de los motores de inducción no llevaron necesariamente a mejoras en la eficiencia de su funcionamiento. El diseño se dirigió hacia la reducción de los costos iniciales de los materiales para su construcción y no hacia el aumento de su eficiencia. El esfuerzo de diseño se orientó en tal dirección porque la electricidad era tan costosa que ello hizo que el costo primario de un motor fuera el principal criterio de los compradores para la selección. Desde que el precio del petróleo comenzó a subir en forma espectacular en 1973, el costo de funcionamiento de vida en las máquinas se ha vuelto más y más importante, los costos 1.
(14) iniciales de instalación se volvieron relativamente menos importantes. Como resultado de estas tendencias se puso nuevo énfasis en la eficiencia energética de los motores tanto por parte de los diseñadores como de los usuarios de las máquinas. Hoy en día, los principales fabricantes producen nuevas líneas de motores de inducción de alta eficiencia. Se usan varias técnicas para mejorar la eficiencia de estos motores, en comparación con el diseño tradicional de eficiencia normalizada. Entre estas técnicas están: 1. Uso de más cobre, incremento del área del conductor, en los devanados del estator para reducir las pérdidas en el cobre. 2. La longitud del núcleo del rotor y del estator se aumentan para reducir la densidad del flujo magnético en el entrehierro de la máquina. Esto reduce la saturación magnética, disminuye las pérdidas en el núcleo y la corriente de magnetización. 3. Uso de más acero en el estator, lo que permite una mayor transferencia de calor y reducir la temperatura de funcionamiento. El ventilador del rotor se rediseña para reducir las pérdidas por batimiento. 4. Uso en el estator de un acero especial de alta calidad eléctrica, con bajas pérdidas específicas y reducción de las pérdidas magnéticas. 5. El acero se fabrica de laminaciones más finas y compactas con una resistencia específica interna muy alta. Ambos efectos tienden a reducir las pérdidas por corrientes parásitas en el motor. 6. El rotor es maquinado cuidadosamente para lograr un entrehierro uniforme, lo que reduce las pérdidas adicionales. Un motor eléctrico es esencialmente una máquina que convierte energía eléctrica en movimiento o trabajo mecánico, a través de procesos electromagnéticos. Existen básicamente tres tipos de motores eléctricos: motores de corriente directa (CD), motores de CA. Los motores de CA son los tipos de motores más usados en la industria, su utilidad es innegable. De acuerdo a su alimentación se dividen en tres tipos: monofásicos (1ø), bifásicos (2ø) y trifásicos (3ø). La importancia de los motores asincrónicos se debe a su construcción simple y robusta, sobre todo en el caso del rotor en forma de jaula, que les hace trabajar en las circunstancias más adversas, con excelente servicio y pequeños mantenimientos. Hoy en día se puede decir que más del 80% de los motores eléctricos empleados en las industrias y en el hogar son de este tipo de máquinas, trabajan con una frecuencia de alimentación constante, en la mayoría de las aplicaciones. La máquina asincrónica o de inducción al igual que cualquier otro dispositivo de tipo rotativo que convierte la energía eléctrica en mecánica o viceversa, está formado por un estator y un rotor. En el estator se coloca el devanado de armadura, alimentado por una red monofásica, bifásica o trifásica. El rotor puede ser bobinado o de jaula de ardilla, las corrientes que circulan por él aparecen como consecuencia de la interacción con el flujo del estator y el efecto rotacional. 2.
(15) La mejor característica de comportamiento de estas máquinas se obtiene bajo condiciones simétricas en sus fases y un sistema balanceado de tensiones con ello se logra más alta eficiencia, menores ruidos y vibraciones, lo que garantiza menor calentamiento y una vida útil más larga. En los sistemas industriales se dispone de fuentes de CA de tres (3) fases, utilizándose motores de inducción 3ø, en el área residencial, oficinas y pequeños talleres. La tarea de proyección o diseño de un motor difiere de la de recálculo, en la segunda se parte de una estructura magnética ya diseñada con dimensiones prefijadas como los diámetros y longitud del paquete conformado por las laminaciones, presenta una determinada cantidad de ranuras y dientes. Su volumen prismático, número de polos, condiciones de ventilación, clase de aislamiento, entre otros determinan la potencia de salida del motor. La tarea de recálculo es muy frecuente en talleres de reparación, es necesaria y no siempre se repone el devanado como una copia fiel del original, ya sea por cambio de tensión, polos, aislamientos. En general tanto desde el punto de vista de diseño como de recálculo, en la literatura el mayor énfasis se hace sobre el motor de inducción 3ø, fundamentado por su mayor porcentaje de utilización, mayores potencias y su característica básica es la simetría de sus devanados que implica una distribución uniforme de la carga lineal específica, mejor forma de onda espacial de la fuerza magnetomotriz (FMM) e igual llenado de la ranura. Además, lo más típico es el caso de un devanado imbricado doble capa cuyo paso de bobina relativo sea próximo a 0,8, no se hace énfasis en el uso de devanados concéntricos y no presentan los esquemas de distribución de bobinas y sus interconexiones. Cuando un motor se deteriora, algo frecuente, puede reutilizarse con la sustitución de las componentes dañadas, en el caso de los devanados puede realizarse una réplica fiel o una modificada, en dependencia de los materiales en existencias o una reconversión deseada. En países donde la situación económica no es favorable habitualmente se usan los materiales disponibles y por otra parte pudiera necesitarse un cambio de tensión o de polos, en todos estos casos puede cambiar su potencia y el comportamiento del motor, ello implica un proceso de recálculo. En la práctica pueden encontrarse devanados de los tipos imbricado y concéntrico, tanto de simple capa como de doble capa, que, bajo iguales condiciones de número de bobinas por polo, vueltas y paso de bobina, presentan similar distribución espacial de la FMM. Otros aspectos que inciden son el paso de bobina en función de la conexión y del contenido de armónicos espaciales a minimizar, el factor de llenado de la ranura y criterios prácticos de variables como la inducción magnética y la densidad de corriente. Todas estas cuestiones conducen al problema científico siguiente: ¿Cómo integrar los criterios científicos y prácticos en el recálculo de los devanados del motor de inducción 3ø que posibilite la obtención de un mayor conjunto de variantes en los tipos de devanados y sus características que respondan a los diseños más frecuentes implementados por los fabricantes? 3.
(16) Objeto: Motores de inducción 3ø. El campo de acción: Diseño de los devanados de motores de inducción 3ø. En correspondencia con el problema y el objeto de estudio se establece como Objetivo general de la investigación: Proponer una metodología para el recálculo de los devanados de motores inducción 3ø de rotor jaula de ardilla, que integre los criterios científicos y prácticos que posibilite la obtención de un conjunto de alternativas para los devanados de armadura y la selección de variables electromagnéticas. Objetivos específicos: . . . . Revisar bibliografía sobre métodos de diseño y recálculo de motores de inducción 3ø. Recopilar datos de los devanados y características constructivas de los devanados de diversos motores de inducción 3ø, tantos prácticos como teóricos, para la obtención de criterios de diseño. Analizar los intervalos para las variables electromagnéticas en las diferentes fuentes bibliográficas y en casos prácticos, para definir sus magnitudes. Establecer la metodología que abarque los aspectos relacionados con los tipos de devanados y sus características que respondan a los diseños más frecuentes implementados por los fabricantes. Implementar una aplicación informática en Matlab con la metodología propuesta que permita la interacción con el usuario y hacer estudios comparativos mediante la variación de diferentes características de los devanados y distintos parámetros. Validar la metodología con diferentes variantes de devanados y juegos de datos.. Para el cumplimiento de dichos objetivos se trazan las siguientes Tareas de investigación o plan de trabajo: 1. Revisión de la bibliografía referente al diseño de las máquinas eléctricas de CA 3ø y especialmente a los distintos parámetros que se pueden variar. 2. Recolección de datos sobre las características de diversos devanados de motores de inducción de CA 3ø, para la obtención de criterios prácticos del diseño según los diferentes fabricantes. 3. Revisión de catálogos de fabricantes de motores de inducción de CA 3ø, con énfasis en los valores típicos de velocidad y potencia en función de sus dimensiones, ajustadas según normas internacionales. 4. Comparación de los datos de fabricantes con los motores recalculados. 5. Elaboración de una metodología de diseño para el cálculo de los devanados de los motores de inducción 3ø, con posibilidad de diferentes alternativas a partir de las características particulares de la distribución espacial y el mayor aprovechamiento de la ranura. 4.
(17) 6. Elaboración de un programa que facilite la ejecución de la metodología propuesta con cierto nivel de interacción en los parámetros de diseño. 7. Confección del informe del Trabajo de Diploma con los requisitos exigidos. Esta investigación logra profundizar en las variables electromagnéticas de diseño y en particular en las diversas características de los devanados de armadura que presentan las máquinas de CA, que incide en el proceso de diseño del mismo. Además, el levantamiento práctico de las características de los devanados de un gran número de motores de inducción 3ø que fueron reparados en el Taller de enrollado del Central Héctor Rodríguez de Sitiecito, se le realizaron entrevista a enrolladores de prestigio y años de experiencia en su labor, para esclarecer diversos criterios prácticos sobre cuáles son los tipos y características más utilizadas en los devanados en función de su potencia, si realmente su selección responde a la potencia del motor, su paso de bobina y su relación con la conexión de sus fases, se identifica el tipo de ranura más frecuente, el factor de llenado y la densidades de corriente , se valora las facilidades de su ejecución. Se muestran tablas con los datos de los conductores esmaltados fabricados por ELEKA (industria cubana y disponible en el mercado), tablas prácticas que permiten sustituir un calibre dado por varios hilos, en función de la disponibilidad de ellos, valorar los factores de llenado en función del asilamiento de ranura existente. Se propone una metodología sencilla, con basamentos científicos y prácticos para el recálculo de los devanados de motores de inducción 3ø que contempla diversos casos que frecuentemente se fabrican, en cuanto tipo de devanado y capas, se valida a través de varios casos para poder analizar el impacto de algunas variables. Sin duda la investigación y profundización en el tema de devanados en máquinas eléctricas de CA, es un material valioso para el proceso docente y los grupos investigativos. Además, el banco de datos reales, permite realizar tareas extra clases y trabajos investigativos. Los resultados de este trabajo son de aplicación inmediata en el proceso docente y en particular en los grupos de trabajo científico de Máquinas Eléctricas, además puede ser una herramienta de trabajo para los enrolladores con un asesoramiento mínimo, a implementar como un trabajo de extensión comunitaria a realizar por estudiantes y profesores. Se realizó una amplia búsqueda bibliográfica, partiendo de libros clásicos de diseño, folletos de recálculo, trabajo de diploma e investigativos, artículos, catálogos, normas y procedimientos. Se pudo constatar la vigencia del tema en universidades latinoamericanas. Este trabajo consta de tres capítulos, además de la introducción, conclusiones, recomendaciones, referencias bibliográficas y anexos correspondientes. En el capítulo 1: se abordan los aspectos constructivos básicos de los motores de inducción 3ø, las características del campo magnético lo cual justifica la necesaria condición de 5.
(18) simetría de sus devanados por polo y fase, las distintas variables electromagnéticas que, en conjunto con la clase de aislamiento, el sistema de enfriamiento y el volumen de la estructura magnética, definen los valores de la potencia de salida e indicadores energéticos de la máquina eléctrica rotatoria (MER). Se profundiza en las características del devanado existentes, en especial en variantes comprobadas en la práctica a pesar de no ser muy recomendadas por diferentes autores. En el capítulo 2, se analizan los resultados de la investigación práctica realizada a 770 motores en el taller de enrollado del CAI Héctor Rodríguez, para identificar los valores de las magnitudes electromagnéticas, el tipo de devanado, sus interconexiones, el paso de bobina, el factor de llenado, entre otros. Se puntualizan y verifican algunos criterios teóricos para posteriormente aplicarse en el recálculo de los devanados. Se define la metodología sobre bases científicas y prácticas, más abarcadora en cuanto a las variantes de devanados posibles a encontrar, con ciertas particularidades más simples en el cálculo de la corriente y la potencia del motor. El capítulo 3, muestra el software que se diseña a partir de la metodología definida en el capítulo 2, así como la explicación del funcionamiento de cada una de las ventanas que componen el programa. Se brinda una explicación simple y detallada sobre los componentes de cada ventana según la selección de la operación a realizar. Finalmente se exponen en tablas resultados obtenidos de la ejecución de las distintas variantes y se aborda a conclusiones respecto a los valores obtenidos en comparación con algunas referencias de fabricantes.. 6.
(19) CAPÍTULO 1. Aspectos fundamentales para el recálculo de los devanados En el diseño de una máquina eléctrica se requiere de varios aspectos, entre ellos el diseño del circuito magnético, a partir de la selección del material del núcleo, luego el diseño de sus devanados conjunto con la selección de su aislamiento, y para culminar la selección de sus partes mecánicas, como son la carcasa, sistema de enfriamiento, eje, rodamientos. Cada uno de estos componentes consta de valores que dependen del empleo que tendrá la máquina, que están definidos por las características de los materiales a emplear, lo que determina la eficiencia, el costo y la vida útil de la máquina. Luego de construida la máquina eléctrica rotatoria (MER) y puesta en explotación, en el mayor porcentaje de los casos, las roturas se producen por fallos en sus devanados o rodamientos, o ambos. En el caso específico de la máquina de inducción de jaula de ardilla ambos componentes son reparables. Se recupera el equipo con un ahorro de materiales, a un costo relativamente bajo en la mayoría de los casos donde producto de la rotura y los trabajos de reparación, no se afecten las laminaciones del núcleo. Por otro lado, además de la reparación por avería, puede requerirse variar algún parámetro, como el calibre del conductor en caso de no disponibilidad de algunos calibres, cambio del material aislante, cambio del nivel de tensión o cambio del número de polos, para lo cual se realiza un recálculo de sus devanados, con su consecuente variación de potencia y otros parámetros de operación. En el presente capítulo corresponde analizar el efecto de las distintas variables electromagnéticas que, en conjunto con la clase de aislamiento, el sistema de enfriamiento, el volumen de la estructura magnética, definen los valores de la potencia de salida y los indicadores energéticos de la MER. La densidad de flujo, como una de las variables, define el punto de operación del circuito magnético y a su vez la magnitud de la corriente de excitación, además de las pérdidas magnéticas. Sin embargo, es la característica del devanado la que determina la distribución espacial de la FMM del campo magnético, al seleccionar una correcta distribución se puede lograr una mayor sinusoidalidad en su distribución espacial, lo que trae como ventajas que la máquina opere con menos vibraciones, ruidos, y disminuir el efecto de los armónicos espaciales de orden superior. Los devanados se confeccionan de alambre de cobre esmaltado, sus dimensiones quedan determinadas por los valores permisibles de la densidad de corriente, otra variable que juega con la potencia de salida a lograr y las pérdidas eléctricas en él. Es por ello, que es necesario profundizar en dichos aspectos, recopilar los intervalos recomendados para estas variables electromagnéticas, su dependencia de detalles constructivos o materiales que pueden modificarlas, tanto desde el punto de vista teórico como práctico.. 7.
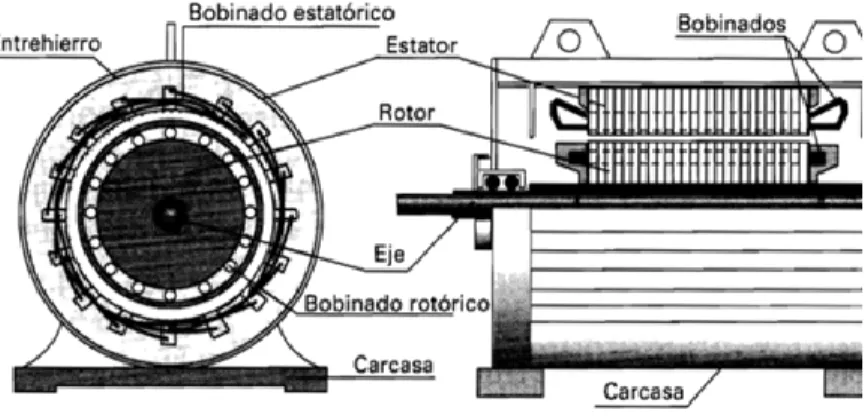
(20) 1.1 Generalidades Los motores asincrónicos 3ø usualmente son más utilizados en la industria por múltiples razones: robustez, costo, mayor eficiencia con menor ruido y vibraciones. Además, resulta muy simple la inversión de su sentido de giro, con amplias facilidades en su control. Admiten variaciones de tensión en 10% y de frecuencia en un 5%.[1-3]. Los motores asincrónicos 3ø se usan para accionar máquinas de herramientas, bombas, elevadores, ventiladores, sopladores, transportadores y muchas otras más. Generalmente constan de 2, 4 ,6 u 8 polos, los motores más vendidos en el mercado son los de 2 y 4 polos debido a que son los que poseen mayor velocidad. Las tensiones más utilizadas para estos son 220 V, 380 V y 440 V, 575 V, 660 V para las frecuencias de 50 Hz y 60 Hz, aunque se emplean otros valores como se puede observar en el Anexo I.1. La frecuencia y número de polos determinan el intervalo en que se mueve la velocidad de rotación del motor. Se fabrican en un intervalo amplio de potencia: 0.18, 0.25, 0.37, 0.55, 0.75, 1.1, 1.5, 2.2, 3.0, 4.0, 5.5, 7.5, 11, 15, 18.5, 22, 30, 37, 45, 55, 75, 90, 110, 132, 160, 200, 250, 315, 400, 450, 500, 560, 630 y 710 kW para tensiones por debajo de 1000 V. Éstos son utilizados en miniindustrias, pequeños talleres, en las grandes industrias, por lo que tienen gran diversidad de dimensiones según sus usos y potencias.[4-11] Estos motores básicamente están construidos de tres partes esenciales, como se muestra en la Fig. 1.1: Estator, rotor y carcasa.. Fig. 1.1. Motor asíncrono trifásico, dibujado en sección.. El estator de una máquina asincrónica juega un papel muy importante en el proceso de conversión de energía, es aquella parte de la máquina en régimen motor que absorbe la energía eléctrica a ser transformada, que aporta la FMM. Cuya forma de onda determina la calidad de dicho proceso, al cual le acompañan ruidos, vibraciones, pérdidas eléctricas, y magnéticas.. 8.
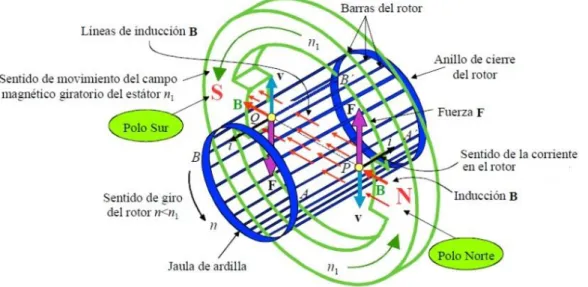
(21) Las partes fundamentales del estator lo son el marco o carcasa, el núcleo laminado ranurado de acero al silicio, los devanados formados por bobinas agrupados por fase e interconectadas, los materiales aislantes requeridos y los rodamientos. El rotor, es la parte del motor que recibe inductivamente la energía eléctrica para ser transformada en energía mecánica, necesita de conductores montados en su estructura magnética, su eje y otros elementos con el ventilador interno. Se van a diferenciar dos tipos de acuerdo a las características constructivas, como es el caso del rotor de la jaula de ardilla y el de rotor bobinado. El estator de los motores asincrónicos 3ø, consta de tres fases espaciadas a 120o eléctricos, a ser energizadas desde una fuente de CA 3ø, que establece un campo magnético de características especiales conocido como campo magnético rotatorio de amplitud constante y girando a la velocidad sincrónica. El movimiento relativo entre este campo y el rotor induce fuerzas electromotrices sinusoidales en las barras conductoras del rotor, circulando corriente por ellas que interactúan con el campo magnético giratorio produciendo una fuerza sobre éstas que actúa tangente al rotor y con ello un par o momento electromagnético, que lo hará girar en igual sentido y a una velocidad inferior. De forma muy representativa sus elementos y principio de operación se sintetizan en la Fig. 1.2. La diferencia en velocidad se llama "deslizamiento" y varía con la carga mecánica acoplada.. Fig. 1.2 Representación del principio de operación del motor asincrónico.. 1.2 Características del campo magnético y la FMM en motores de inducción 3ø La distribución de la FMM en una máquina real no se comporta totalmente sinusoidal, dada la presencia de ranuras que separan las bobinas entre sí, que produce una distribución escalonada de la FMM, cuanto mayor sea la cantidad de ranuras alrededor de la superficie. 9.
(22) de la máquina y cuanto más cercanas estén una de otra, es mejor, más sinusoidal será esta distribución, como puede observarse en la Fig. 1.3.. Fig. 1.3. Distribución espacial de la FMM para un devanado distribuido. Para reducir la amplitud de los armónicos de orden superior, es requerido trabajar a nivel de diseño en la reducción del paso de bobina, para lograr un devanado más distribuido. Al construirlos con paso fraccionario reduce ligeramente la magnitud del primer armónico, pero notablemente disminuyen los componentes armónicos de la FMM y sus efectos negativos. Algunos armónicos de mayor frecuencia, llamados armónicos de diente o de ranura, no pueden suprimirse con bobinas de paso fraccionario, pero sí al dar inclinación a los conductores del rotor de un motor de inducción.[10, 12-17]. Matemáticamente la FMM por fase se formula según varios autores[18-21]. Cada componente armónica de orden impar tiene una amplitud y una distribución espacial, los armónicos de orden superior, su cantidad de polos aumentan v veces respecto al 1er armónico. La amplitud máxima viene dada por:. 𝐹𝑣 =. 4∗√2 𝜋. ∗. 𝑁𝑚 𝑣𝑝. ∗ 𝑘𝑤𝑣. (1.1). Siendo Kwv, el factor de devanado que se determina por las características del paso de bobina y la distribución de las bobinas por polo, aspecto que se debe particularizar en función de las características del devanado.. 𝐾𝑤𝑣 = 𝐾𝑝𝑣 ∗ 𝐾𝑑𝑣. (1.2). 1.3 Tipos de motores de inducción 3ø En función de las características constructivas del rotor, básicamente son de dos tipos: . De jaula de ardilla. De rotor devanado o bobinado 10.
(23) Ambos tipos de rotores presentan un núcleo laminado montando sobre el eje. El motor tiene tapas en ambos lados, sobre las cuales se encuentran insertados los rodamientos; pueden ser de rodillos o de deslizamiento (rodamientos de bolas), sobre los que rueda el rotor. Estas tapas se fijan a la carcasa en ambos extremos por medio de tornillos de sujeción.. 1.3.1 Motores de rotor bobinado El devanado del rotor, Fig. 1.4, es similar al del estator con igual número de polos, es más compleja su construcción respecto al de jaula de ardilla y más cara su manufactura, se utiliza solo para motores o generadores 3ø. Las tres fases se conectan en estrella, los extremos libres se conectan a tres anillos de cobre aislados y fijos al rotor. Encima de los anillos se colocan las escobillas de grafito conectadas entre ellas en cortocircuito [17], a un banco de resistencias trifásicas en conexión Y, o a algún convertidor. Por estas razones a este motor se le denomina de "rotor bobinado" o de "anillos rozantes". En este caso hay acceso eléctrico desde el exterior al rotor. Este motor se emplea poco debido a su mayor costo, pero sin duda con muy variadas características de operación, que en determinadas aplicaciones justifica su alto costo.. Fig. 1.4. Rotor bobinado o de “anillos rozantes”. Estos rasgos especiales de este rotor posibilita modificar la característica momentovelocidad del motor [13]. Así variando la resistencia externa se puede variar el momento de arranque entre el 150% y el 250% del nominal, aproximadamente, y reducir la corriente de arranque a dos veces la nominal. Si durante el funcionamiento del motor no se varía la velocidad, al finalizar el arranque, los tres anillos del rotor se cortocircuitan para que funcione como un motor de rotor en jaula de ardilla.. 1.3.2 Motor de jaula de ardilla El de jaula de ardilla es el más usado[17, 22-25] y recibe este nombre debido a que la estructura constructiva de este devanado parece una jaula de ardilla, normalmente de aluminio fundido, en otras ocasiones de barras de cobre. Para los motores de baja y media potencia, la jaula de ardilla se puede construir con aluminio vertido bajo presión y vacío parcial, lo cual permite evitar la presencia de burbujas de aire, hacer las barras y los anillos 11.
(24) en la misma operación. Para los motores más grandes se suelen utilizar barras de cobre o latón[26]. Este rotor consta de un cierto número de barras de cobre o aluminio ubicadas en ranuras previamente construidas en el rotor, paralelamente a su eje y puestas todas en cortocircuito en ambos extremos por medio de dos anillos metálicos, tal como se ve en la Fig. 1.5.. Fig. 1.5. Rotor de un motor Jaula de Ardilla.. A menudo, los conductores se inclinan levemente a lo largo de la longitud del rotor para reducir ruido, evitar puntos muertos entre el rotor y el estator, reducir las fluctuaciones del esfuerzo de torsión que pudieran resultar a algunas velocidades, y debido a las interacciones con las ranuras del estator.[12, 13, 17] A partir de los diseños que se han realizado con el paso de los años, se establecen combinaciones de ranuras de estator y rotor, en función del número de polos. Las variantes de mejor operación se observan en el Anexo I.2, para los casos en que son comunes en distintos polos. En lo que concierne al rotor, lo más importante es la buena elección del número de ranuras, que evita la presencia de vibraciones, ruido magnético e intervalos de sincronismo, una especie de escalones en la parte de baja velocidad de la característica de momento. El número de ranuras del rotor (S2) nunca debe ser igual al del estator (S1). Puede ser más grande, pero en general es más pequeño, se obtienen buenos resultados para valores entre un 15 y un 30% más bajos. Para evitar vibraciones se escoge S2 de manera que S1-S2 sea distinto de ±1, ±2, ±(𝑝±1) y ±(𝑝±2). Para evitar un momento de “sacudido”, debido a la variación del momento de arranque para las diferentes posiciones del rotor, S1-S2 debería ser distinto de todo múltiplo de ±3𝑝. Los picos de sincronismo son eliminados para valores de S1- S2 distintos de ±𝑝, −2𝑝 y −5𝑝. Considerando estas restricciones se plantea una tabla con los valores posibles de parejas de números de ranuras estator-rotor para motores de 2, 4, 6 y 8 polos que se muestra en el Anexo I.3. Se puede observar que algunas de estas combinaciones no son iguales para todos los números de polos, aspecto a considerar cuando se procede al diseño o recálculo.. 12.
(25) La forma de la ranura del estator tiene una importancia especial en la característica de momento contra velocidad [4-6, 8-11, 18, 26-28], es por ello que las características constructivas de las barras se han normalizado en cuatro o cinco clases de diseño NEMA que determinan las características que brinda la barra en el arranque y en condiciones nominales. Éstas determinan su corriente y momento de arranque, su velocidad o deslizamiento y eficiencia en condiciones nominales. La clase de diseño NEMA que responde a las dimensiones relativas de las barras en cuanto altura y sección y que determinan una variación en el comportamiento, se muestra en la Tabla 1.1. Tabla 1.1 Clases de diseño NEMA de tipo de jaula de ardilla y sus características básicas Clase Marr/Mnom Iarr/Inom Regulación de Denominado como: NEMA Velocidad (%) A 1.5-1.75 5-7 2-4 Normal B 1.4-1.6 4.5-5 3.5 Jaula profunda o de propósito general C 2-2.5 3.5-5 4-5 De doble jaula alto Marr con baja Iarr D 2.5-3.0 3-8 5-8 , 8-13 De alto Marr por alta resistencia. 1.4 Características constructivas Las características constructivas son importantes para el motor asincrónico trifásico y muchas de ellas dan su sello característico. Seguidamente se describen éstas.. 1.4.1 Carcasa Es la estructura externa de protección y soporte del motor, sobre la cual existen esfuerzos mecánicos dado por el peso del motor y los esfuerzos longitudinales que resultan de la fijación del paquete de chapas[29]. La misma puede ser construida con hierro fundido, acero o aluminio. Debe ser resistente a la corrosión y juega un papel importante en la protección de sus partes internas y del personal que las opera, así como en el proceso de intercambio de calor con el medio externo. Puede ser lisa o presentar aletas para aumentar su superficie de intercambio de calor con el medio. Aunque los indicativos de grado de protección puedan ser combinados de muchas maneras, solamente algunos tipos de protección son empleados en los casos normales. Los mismos son: IP21, IP22, IP23, IP44 e IP55. Los tres primeros son motores abiertos y los dos últimos son motores cerrados. Para aplicaciones especiales más rigurosas, son comunes, también, los grados de protección IP55W (protección contra intemperies), IP56 (protección contra “agua de oleaje”), IP65 (totalmente protegido contra polvos) e IP66 (totalmente protegido contra polvos y agua de oleaje). Los valores de IP e IK más empleados se recogen en el Anexo I.4.. 13.
(26) 1.4.2 Núcleo del estator La construcción del núcleo del estator es generalmente la misma para todas las máquinas eléctricas de C.A., incluso para pequeñas máquinas se usa el mismo tipo de estator[30]. El núcleo o estructura ferromagnética de los motores asincrónicos debe estar formado por laminaciones finas de acero al silicio de grano no orientado, conocidos también por aceros eléctricos, en él actúan flujos magnéticos alternos que origina la formación de corrientes de Foucault o parásitas provocando sus concebidas pérdidas. Estas laminaciones contienen de 1 a 3% de silicio y están aisladas por películas muy finas de óxido o barniz de alrededor de 0.002 mm. El silicio aumenta la resistividad del acero y reduce las componentes de las corrientes parásitas.[17, 18, 27, 30, 31] Se emplea un bajo contenido de silicio, pues el también provoca una reducción en la permeabilidad a valores altos de inducción. Se pueden adicionar otros elementos como aluminio y manganeso, los cuales actúan favorablemente la estructura granular del acero y por consiguiente contribuyen a rebajar las componentes de histéresis de las pérdidas del núcleo. En la práctica, los aceros eléctricos están divididos en dos clases con subdivisiones. Estas han sido establecidas de común acuerdo en la industria. Estas clases se basan en la propiedad magnética primaria del material, la forma, la diferencia con los otros grados, o el método con el cual se produce el material. Las principales clases son: . Grano orientado Grano no orientado Completamente procesados Semi-procesados. El núcleo del estator se hace de láminas magnéticas de un espesor bien fino, comúnmente entre 0,35 y 0,5 mm, a mayor espesor incrementa las pérdidas de núcleo. Las más finas se usan en máquinas de más alta frecuencia. Los distintos espesores de láminas referenciados se muestran en el Anexo I.5. Las laminaciones deben poseer un aislamiento el cual puede ser por un proceso de oxidación natural, con barniz o sustancias inorgánicas. Más detalles puede verse en el Anexo I.6. Con el empleo de los diferentes materiales y composiciones en los núcleos se obtienen distintas características de los materiales definidas por la relación entre las magnitudes la de inducción B y la intensidad del campo H, así como los coeficientes de sus pérdidas específicas de histéresis y corrientes parásitas, en su circuito magnético. A través de los años, con el cambio en las tecnologías y métodos de fabricación de las laminaciones, se tienen materiales con características superiores, que admiten valores superiores de inducción magnética, pero estos son confidenciales o reservados para los grandes 14.
(27) fabricantes de motores. No obstante, algunas literaturas [3, 27, 33, 40] muestran tablas o características, pero en procesos de explotación o rediseño no se disponen.. 1.4.3 Tipos y características de ranuras y dientes Para motores de pequeño diámetro se usan ranuras parcialmente cerradas o semicerradas. Los dientes son de caras paralelas, lo que es muy favorable para mantener constante la inducción en la sección del diente. La abertura de la ranura, distorsiona un poco la distribución uniforme de la inducción en el entrehierro incidiendo en la permeancia de las trayectorias del flujo disperso, componentes armónicas y en pérdidas de carácter adicional, por ello se debe minimizar dicha abertura, pero limitada por la necesidad de introducir el devanado en la ranura. En máquinas de pequeña y mediana potencia normalmente son semicerradas y es recomendable: . 2.5mm para D ≤ 20cm 3.0 mm para 20 ˂D≤ 38 cm. En las máquinas de gran potencia, dada la característica del conductor normalmente de sección rectangular, que determina que las bobinas sean preformadas, las ranuras son abiertas, rectangulares, con ello la sección del diente es variable. Los motores generalmente se fabrican con un número de ranuras que sea igual a un múltiplo del número de polos por el número de fases, lo que garantiza simetría en cuanto a la cantidad de bobinas por fase.[30] Los tipos de ranuras más frecuentes que se emplean en los motores asincrónicos en función de su potencia, según [3, 27, 32] son las representadas en la Fig. 1.6.. Fig. 1.6 Tipos de ranuras más frecuentes.. 1.5 Devanados en máquinas de CA 3ø Los devanados de una máquina eléctrica, son de gran importancia por diversas razones, su simetría por fase garantiza por una parte la amplitud de la FMM por fase y la resultante en una máquina 3ø, por la otra, seleccionando adecuadamente varias de sus características se puede lograr una mayor sinusoidalidad en la distribución espacial de la FMM de él y con. 15.
(28) ello mejores características de comportamiento de la máquina eléctrica al reducir los armónicos de espacio. En general los devanados del estator de las máquinas de CA, son en esencia devanados distribuidos pues sus bobinas se colocan en ranuras espaciadas simétricamente en toda la superficie del estator, diferenciándose en los 3ø, la ubicación de las fases en 120o eléctricos y los polos consecutivos en 180o eléctricos, también conocidos como grupos o la zona de fase, tienen varias bobinas como se muestra en la Fig. 1.7.. Fig.1.7. Representación de la distribución de los polos/ fase y la distancia entre ellos y las fases para un devanado 3ø de 4 polos.. Es de destacar los polos de la fase A, A1, A2, A3 y A4, a 180o eléctricos al corresponder con el paso polar p, el paso ocupado por cada polo o zona de fase v (60o eléctricos), la distancia entre fases 120o eléctricos, por ejemplo: entre B3 y A3. En todos estos casos en función de los grados eléctricos. Si se considera que los polos A1, B1 y C1 son el comienzo y su dirección relativa le corresponde un polo norte, entonces todos los impares serán norte y los pares serán sur, luego en la periferia del estator irán quedando de forma alternativa polos norte y sur de las tres fases, ello asegura simetría y un campo rotario de amplitud constante en el tiempo. El paso polar p es la distancia entre dos polos consecutivos, puede darse en ranuras o en unidades métricas o en grados eléctricos, siendo:. 𝜏𝑝 = 𝜏𝑝 =. 𝜋𝐷𝑖 𝑝 𝑆1 𝑝. dado normalmente en mm. dado normalmente en mm. (1.3). (1.4). 16.
(29) Otra variable típica, lo es la zona de fase (p ) no es más que la zona periférica que ocupa un polo o grupo de una fase. En devanados 3ø la zona de fase debe ser 60o eléctricos:. 𝜏𝑣 =. 𝜏𝑝. (1.5). 𝑞. q =número de fases p= número de polos Cada polo o grupo requiere de una o varias bobinas, si el número de bobinas totales del devanado Z, a cada fase le corresponden Zf bobinas y a cada polo Zpf bobinas, en un devanado confeccionado por polos, se tiene: 𝑍. 𝑍𝑓= 𝑞. (1.6) 𝑍. 𝑍𝑝𝑓 = 𝑞∗𝑝. (1.7). Las bobinas que conforman el grupo, presentan un paso de bobina, que no es más que la distancia entre sus lados, que puede darse en ranuras Yb, en grados eléctricos o en función de una fracción () del paso polar. Una bobina es de paso pleno o completo cuando entre sus lados hay 180o eléctricos, si no es generalmente un paso reducido. 𝜌 = 𝛽𝜋 en grados eléctricos 𝑌𝑏=𝑆1 en término de ranuras y de paso pleno. (1.8) (1.9). 𝑝. El paso de bobina, se expresa normalmente en términos de ranuras, un paso de bobina de 9 ranuras, implica que un lado de la bobina se ubica en la ranura 1 y el otro en la 10, a 9 ranuras entre ellos, como se muestra en la Fig. 1.8.. Fig. 1.8. Paso de bobina en términos de ranuras.. El paso de bobina debe ser igual o menor que el paso polar, 180o eléctricos, este paso debe ser en términos de ranuras un número entero, depende del número de ranuras y del número de polos, ecuación 1.9. Al seleccionar el paso de bobina debe considerarse la reducción o eliminación de los armónicos espaciales de orden superior.. 17.
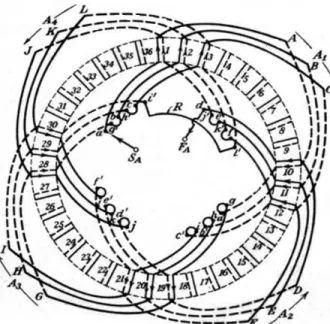
(30) Para eliminar un armónico impar de orden v se debe calcular la fracción del paso reducido como: 𝑣−1. 𝛽=. (1.10). 𝑣. Para eliminar un armónico de espacio en función de su orden, se tiene: 2 3 4 5. . El 3er armónico de espacio 𝛽 =. para un valor de =120o eléctricos.. . El 5to armónico de espacio 𝛽 = para un valor de =144o eléctricos.. . El 7mo armónico de espacio 𝛽 = para un valor de =154o eléctricos.. . El 5to y 7mo armónico minimizado 𝛽 = . para un valor de =150o eléctricos.. 6 7. 5 6. Lo más recomendado[18, 32, 33], independientemente de la conexión entre las fases es 5. precisamente 𝛽 = 6. Una solución alternativa de minimizar simultáneamente el 5to y 7mo es seleccionar el valor al cual le corresponde =150o eléctricos. Tanto en la literatura de diseño [3, 27, 33, 40] en los datos que se obtienen en la práctica en el Taller Héctor Rodríguez, es muy común tomar este valor como punto de partida o una ranura menos respecto al paso polar completo. El paso de bobina determina la magnitud del factor de paso, el cual considera el efecto que los lados de bobina no estén a 180o eléctricos, definido para cualquier armónico de orden v, como:. 𝐾𝑝𝑣 = 𝑠𝑒𝑛. 𝑣𝜌 2. ≤1. (1.11). Indiscutiblemente el paso real a implementar debe ser múltiplo del ángulo entre ranuras (), lo que equivale a un número entero de ranuras. El ángulo eléctrico entre ranuras, está dado por:. 𝛾=. 180𝑝 𝑆1. (1.12). Este ángulo entre ranuras permite ubicar físicamente los comienzos de las fases, los polos y los lados de bobina. El ángulo entre fases es 120o eléctricos, y en términos de ranuras Yf será:. 𝑌𝑓 =. 120 𝛾. (1.13). El ángulo entre polos consecutivos de una fase es 180o eléctricos, en términos de ranuras Ypf será:. 𝑌𝑝𝑓 =. 180 𝛾. (1.14). Representación esquemática de los devanados. 18.
(31) Los esquemas son necesarios para analizar, representar las características y particularidades de los devanados, así como para la ejecución práctica de ellos. En el proceso de confección y montaje o reparación se requiere del esquema del devanado. En los esquemas desarrollados de los devanados de dos capas, los lados de bobina o secciones que se encuentran cerca del espacio del aire, o sea, en la capa superior de la ranura, son representados con líneas llenas y los lados que yacen de la capa inferior, con líneas de trazos o punteadas. En otros esquemas se representan ambos con líneas llenas, pero aquellos lados que están en la capa superior, se disponen a la izquierda y los de la capa inferior, a la derecha. En los esquemas de los devanados 3ø los conductores de diferentes fases se pueden representar con diversas líneas, con líneas llenas, trazadas o de puntos y rayas, líneas de distinto color o de diferente grosor. Por regla, en los esquemas se indican los números de ranuras, de láminas de colector, también pueden indicarse los números de bobinas y de sus lados, los números o marcación de los terminales de los grupos de bobinas, de las fases del devanado, se indican direcciones de las corrientes, las zonas de fases, los polos de campo magnético, entre otros aspectos. Clasificación de los devanados en máquinas eléctricas de CA[12, 17, 22, 23, 30, 31, 34] En forma general los devanados de una máquina eléctrica pueden ser clasificados atendiendo a diferentes criterios: De acuerdo al número de capas o lados de bobinas por ranura en: de simple capa, un lado de bobina por ranura de doble capa, dos lados de bobinas por ranura De acuerdo al número grupos y su interconexión: por polos por polos consecuentes De acuerdo al número de bobinas/polo: entero o congruente fraccionario o no congruente De acuerdo a la forma de las bobinas/polo: imbricados o distribuidos (todas las bobinas tienen igual forma y paso de bobina) concéntricos (las bobinas del grupo poseen diferentes pasos de bobinas) La selección de las características al confeccionar un devanado depende de múltiples factores, entre ellos, la potencia del motor, las facilidades en su proceso de manufactura, el. 19.
(32) ahorro de material conductor, la simetría entre las fases, trayectorias en paralelo, su resistencia y reactancia.. 1.5.1 De acuerdo al número de capas o lados de bobinas por ranura El número de capas de un devanado se refiere a la cantidad de lados de bobinas que se colocan en una ranura, en su selección influye las dimensiones de la estructura ferromagnética del estator, la viabilidad en su proceso de manufactura o las mejores características en la distribución espacial de su FMM. En un devanado simple capa, cada ranura tiene un solo lado de bobina como se muestra en la Fig. 1.9.a), las corrientes en todos sus conductores están en la misma dirección y el número de bobinas totales será igual a la mitad del número de ranuras. Sin embargo, en un devanado doble capa hay dos lados de bobinas/ranura, Fig. 1.9.b), uno en la parte inferior de la ranura (lado derecho) y el otro en la parte superior (lado izquierdo) más cerca del entrehierro, que pueden ser de la misma fase en algunas de ellas o de diferentes fases. De acuerdo al paso de bobina seleccionado y el número de fases, cuando las direcciones de las corrientes por dichos lados de bobinas son contrarias, hay tantas bobinas como ranuras.. Fig. 1.9 Lados de bobina por ranura a) Simple capa y b) doble capa.. Si el estator de una máquina posee S1 ranuras, en el cual se colocan Z bobinas, se tiene: 𝑆1. . Devanado simple capa que: 𝑍 =. . Devanado simple capa que: 𝑍 = 𝑆1. 2. (1.15) (1.16). Algunos autores [15, 18, 20, 26] , recomiendan el uso de devanados simple capa, en máquina de baja potencia por la facilidades en el proceso de manufactura y reparación, así como en el ahorro de materiales porque se reducen el número de bobinas a confeccionar. Plantean que, en las máquinas de CA, lo típico es el devanado de dos capas, por varias razones entre ellas: permitir reducir el paso de bobina, un devanado más distribuido, para reducir la amplitud de los armónicos superiores en la FMM o en la FEM, por otra parte, cuando el paso de bobina es reducido, hay ranuras en la cuales coinciden lados de bobina de diferentes fases, lo que implica una reducción en el flujo disperso de ranura, componente fundamental de la reactancia de dispersión. Sin embargo, presenta dificultades en el 20.
(33) proceso de confección del devanado al colocar las últimas bobinas, al tener levantados los otros lados de bobinas se hace complejo y aumenta el tiempo de montaje del devanado. Además, con falla de un grupo, se tiene que levantar varios grupos. Esto último lo resuelven en pequeños motores colocando la mitad de las bobinas abajo y la otra a en la parte superior de la ranura, tal y como se hace en devanados de motores 1ø con el inconveniente en que se produce una ligera, pero no muy representativa variación en la reactancia de dispersión entre las fases.. 1.5.2 Tipos de devanados de acuerdo al número de bobinas/polo En una máquina de CA polifásica para lograr un campo magnético rotario de amplitud constante, se precisa dos elementos, uno la simetría del devanado y el otro el sistema balanceado de su alimentación. En cuanto a la simetría de sus devanados, hay dos condiciones que lo garantizan: 1era condición: El número de bobinas/fase sea un número entero 𝑆. 𝑍𝑓 = 2𝑞1 para devanado simple capa 𝑍𝑓 =. 𝑆1 𝑞. para devanado doble capa. (1.17) (1.18). Esto implica que, en un devanado trifásico, el número de ranuras debe ser múltiplo de seis o el número total de bobinas debe ser múltiplo de tres. 2da condición: El ángulo entre fases (f) sea un múltiplo del ángulo de fase (v), lo cual equivale a que. 𝜏𝑣 𝜏𝑓. ∈ 𝑁. Esta condición puede cumplirse o no.. Pero las bobinas/fase deben distribuirse entre los grupos y el número de bobinas por polos (n) en términos de ranuras y en función del número de capas quedaría como: 𝑆. 1 𝑛 = 2𝑞𝑝 para devanados simple capa. 𝑆. 𝑛 = 𝑞𝑝1 para devanados doble capa. (1.19) (1.20). El resultado del número de bobinas/polo o grupo puede ser o no un número entero y paralelamente puede analizarse el número de ranuras/polo/fase (Kpf) como el caso más general, que puede ser igualmente un número entero o fraccionario. 𝑆. 𝐾𝑝𝑓 = 𝑞𝑝1. (1.21). Estos criterios dan lugar a clasificar los devanados en: entero o congruente fraccionario o no congruente. 21.
(34) En la ecuación 1.21, p son los polos físicos a implementar, lo cual difiere según sea el devanado por polos o por polos consecuentes. Para un valor dado de ranuras, fases y polos, en el devanado doble capa el número de bobinas/polo/fase es igual al número de ranuras/polo/fases mientras que el de simple capa presenta la mitad de número de bobinas/polo/fase. Si el valor numérico de n o Kpf es un entero, se clasifica el devanado como entero o congruente, por ende, todos los grupos tienen igual cantidad de bobinas o ranuras. En el caso de un devanado entero su distribución de bobinas/grupo, buscando una mayor generalidad en los planteamientos, es uniforme, o sea, todos los grupos tiene la misma cantidad de bobinas (n) y para su distribución quedando demostrado además los principios y finales de la fase, así como la interconexión entre los grupos dada la polaridad de los polos que le corresponde, se puede utilizar un esquema muy cómodo a través de una matriz de q columnas por p filas, Fig. 1.10 en cada cuadricula se colocan las n bobinas en serie del grupo. La Fig. 1.10, representa un devanado 3ø, doble capa con 18 ranuras, dos polos, 3 bobinas por grupo:. Fig. 1.10 Distribución de las bobinas/grupo y por fase para un devanado entero. Si por el contrario n o Kpf resulta un valor no entero, se clasifica el devanado como fraccionario o no congruente. Ello lleva a que todos los grupos no tendrán la misma cantidad de bobinas o ranuras. En este caso se obtiene un valor fraccionario, el cual puede representarse como: 𝑐. 𝑐. 𝑛 = 𝑏 + 𝑑 bobinas, 𝐾𝑝𝑓 = 𝑏𝑘 + 𝑑𝑘 ranuras. (1.22). 𝑘. Donde b, bk, c, ck, d y dk, son números enteros, donde c˂d y c/d es una fracción no reducible. Los devanados fraccionarios o no congruentes surgen al economizar el proceso de troquelado de las laminaciones del estator, tal que para un número de ranuras pueda ser implementado cualquier número de polos. En una máquina de CA polifásica para lograr un campo magnético rotario de amplitud constante, se precisa dos elementos, uno la simetría del devanado y el otro el sistema 22.
(35) balanceado de su alimentación. En cuanto a la simetría de sus devanados, hay dos condiciones que lo garantizan: 1. En un devanado 3ø entero o congruente, dado el número de ranuras y polos, más usuales, todos los grupos son iguales se logra la primera condición y la segunda, dado que el ángulo de fase es 60o eléctricos, y el ángulo entre ranuras tiene valores bien típicos de 10, 15, 20, 30o eléctricos, con ello se garantiza que la distancia entre fases sea exactamente 120o eléctricos. 2. En el devanado 3ø fraccionario o no congruente, dichas condiciones de simetría del campo magnético que garantiza el devanado, se logran cuando el denominador de la fracción (d o dr) no sea múltiplo de 3, o sea, 𝑑𝑘 3. ≠entero. (1.23). Además: 𝑝. 𝑝𝑑 = 𝑑 = número entero. (1.24). 𝑘. Cuando se presente un devanado fraccionario, lo primero que debe chequearse son estas dos condiciones anteriores, de acuerdo al número de capas del devanado, que determinan su factibilidad. En la tabla 1.2 se observa la cantidad de ranuras/polo/fase de valores fraccionarios, en función del número de ranuras, sus bobinas/fase y de acuerdo al número de polos. Los casos denotados por x, no se pueden implementar. De ahí se tiene que para devanados simple capa, y los valores de ranuras típicas, no existe factibilidad para devanados de seis polos y muchos otros casos no pueden ser realizados. Tabla 1.2 Ranuras/polo/fase para devanados 3ø simple capa y fraccionarios[33] No ranuras 18 24 30 36 42 48 54 60 Bob/fase polos. 3. 4. 5. 6. 7. 8. 9. 10. 4. 1½. x. 2½. x. 3½. x. 4½. x. 6. x. x. x. x. x. x. x. x. 8. x. x. 1¼. 1½. 1¾. x. 2¼. 2½. 10. x. x. x. 11⁄5. 12⁄5. 13⁄5. 14⁄5. x. En el caso del devanado doble capa fraccionario cuyas ranuras/polo/fase sea un número 𝑐 fraccionario 𝐾𝑝𝑓 = 𝑏𝑘 + 𝑑𝑘 (ranuras) se analizan las condiciones de simetría, de igual 𝑘. manera que para el simple capa. En este caso como se tiene más bobinas/polo/ hay más factibilidad de lograr simetría para más casos en comparación con el simple capa, para menos polos y menos ranuras, como se puede observar en la tabla 1.3. Tabla 1.3 Ranuras/polo/fase para devanados 3ø doble capa y fraccionarios[33]. 23.
(36) No ranuras Bob/fase polos 2 4 6 8 10. 15 5 2½ 1¼ x x x. 18 6 x 1½ x x x. 24 x x x x x x. 30 10 x 2½ x 1¼ x. 36 12 x x x 1½ 11⁄5. 42 14 x 3½ x 1¾ 12⁄5. 48 X x x x x 3 1 ⁄5. 54 18 x 4½ x 2¼ 14⁄5. 60 20 x x x 2½ x. Por otra parte, en los devanados fraccionarios las posibilidades de ramas en paralelo son limitadas por las asimetrías de los grupos, la cantidad máxima de ramas en paralelo (amax) están dadas para un devanado simple capa:. 𝑝𝑑 es impar 𝑎𝑚𝑎𝑥 = 𝑝𝑑 es par 𝑎𝑚𝑎𝑥 =. 𝑝𝑑. 𝑑𝑘 2𝑝𝑑 𝑑𝑘. (1.25) (1.26). En general cada fase tiene la misma cantidad de bobinas y número de grupos, hay que distribuir las bobinas/fase, simétricamente en la periferia del estator[15, 18, 20, 33] para el devanado fraccionario tendrá grupos pequeños de b bobinas y grupos grandes de b+1 bobinas. El caso más simple es cuando la fracción c/d=1/2, donde la mitad de los grupos tiene b bobinas y la otra mitad b+1, a nivel de fase se alternarían y entre fases también. Por ejemplo, para 18 ranuras, devanado 3ø, doble capa y 4 polos, donde n=1½, tal y como se muestra en la Fig. 1.11.. Fig. 1.11 Distribución de los grupos/fase de cada fase. La fase A en rojo, la B en azul y la C en verde.. En forma general se puede determinar la cantidad de grupos grandes como n g y estos se repiten según sea el valor de d y los grupos chicos como nc, tal que: 𝑛𝑔 = 𝑐 grupos con b+1 bobinas 𝑛𝑐 = 𝑑 − 𝑐 grupos con b bobinas. (1.25) (1.26) 24.
(37) Tal que: (𝑑 − 𝑐)𝑏 + 𝑐(𝑏 + 1)= bd+c. (1.27). ng cantidad de grupos grandes de b+1 bobinas nc cantidad de grupos pequeños de b bobinas La distribución entre grupos pequeños y grandes en la periferia, se logra por diversas formas, más o menos parecidas y algunas referencias por autores[20, 26, 27, 35-37] en correspondencia con el tipo devanado según la forma de la bobina. Una regla práctica lo es construir una matriz y para ello se debe calcular el número de bobinas del devanado fraccionario como la fracción irreducible: 𝑍. 𝑛 = 𝑞∗𝑝 =. 𝑐𝑛. (1.28). 𝑑. Con cn*q columnas y p filas, se comienza a marcar por la cuadricula 1 y se van marcando las mismas (puede ser con números consecutivos) con un paso determinado por el valor del denominador de la fracción irreducible d. Si se observa en la Fig. I.1 del Anexo I.7, al comparar la numeración de la misma en las cuadriculas con los comienzos de las bobinas, se observa que en primer grupo de la fase A le corresponden dos bobinas, la 1 y la 2, a la fase C le corresponde un grupo pequeño de 1 bobina, la 3, y a la fase B, dos bobinas la 4 y la 5, exactamente ya quedan los grupos separados por fase y por polos de forma simétrica entre fase y para el devanado completo. Dicha distribución, si se cumplen las condiciones de simetría prevista, debe repetirse para cada par de polos. Para los cálculos del factor de distribución, dada las características de las estrellas de las tensiones por grupo, para el 1er armónico y los de orden superior [15, 20, 27, 33] se puede utilizar el llamado número equivalente de ranuras/polo/fase del devanado fraccionario (ne) definido como: 𝑐. 𝐾𝑝𝑓 = 𝑏𝑘 + 𝑑𝑘 =. 𝑏𝑘 ∗𝑑𝑘 +𝑐𝑘. 𝑘. (1.29). 𝐶. Donde se puede decir que hay 𝑏𝑘 ∗ 𝑑𝑘 + 𝑐𝑘 ranuras/fase para 𝑑𝑘 polos, de ahí que el número de ranuras equivalentes Kpfe se defina como: 𝐾𝑝𝑓𝑒 = 𝑏𝑘 ∗ 𝑑𝑘 + 𝑐𝑘 (1.30) El factor de distribución considera la cantidad de lados de bobina de un grupo y su desfasaje dado por la separación entre las ranuras, este término con un mayor nivel de generalidad, lo cual es necesario dada la diversidad en este caso de devanados de doble capa y simple capa, se puede expresar como:. 𝐾𝑑 =. 180 2𝑞 180 𝐾𝑓𝑝𝑒 ∗𝑠𝑒𝑛 2𝑞𝐾𝑓𝑝𝑒. 𝑠𝑒𝑛. =. 𝑠𝑒𝑛. 90 𝑞. 𝐾𝑓𝑝𝑒 ∗𝑠𝑒𝑛. 90 𝑞𝐾𝑓𝑝𝑒. (1.31). Si el número de fases es q=3, dicha ecuación para el devanado 3ø queda simplificada a: 25.
Figure


+7


![Tabla 1.2 Ranuras/polo/fase para devanados 3 ø simple capa y fraccionarios[33]](https://thumb-us.123doks.com/thumbv2/123dok_es/7340725.456383/35.918.166.758.697.875/tabla-ranuras-polo-fase-devanados-simple-capa-fraccionarios.webp)


Documento similar
Memorias de ultratumba de F.-R. de Chateaubriand, en traducción anónima (1849-1850) Marta Giné Janer
Además de aparecer en forma de volumen, las Memorias conocieron una primera difusión, a los tres meses de la muerte del autor, en las páginas de La Presse en forma de folletín,
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
por unidad de tiempo (throughput) en estado estacionario de las transiciones.. de una red de Petri
La siguiente y última ampliación en la Sala de Millones fue a finales de los años sesenta cuando Carlos III habilitó la sexta plaza para las ciudades con voto en Cortes de
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
