Impacto del intervalo de tiempo definido por IEEE1609 4 para el canal de control (CCH) en el desempeño de las VANETs
73
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA Impacto del intervalo de tiempo definido por IEEE1609.4 para el canal de control (CCH) en el desempeño de las VANETs Autor: Dianelys Valhuerdy Armas [email protected]. Tutor: M.Sc. Mario A. González Cartas [email protected]. Santa Clara 2017 "Año 59 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Tutor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. La mayoría de las ideas fundamentales de la ciencia son esencialmente sencillas y, por regla general pueden ser expresadas en un lenguaje comprensible para todos. Albert Einstein.
(5) ii. DEDICATORIA. A mis padres y mi hermano, por ser mi mayor motivación, la fuerza que me ha ayudado a seguir adelante y la razón de todo este sacrificio. A mi tía Mercy por estar siempre conmigo en los momentos difíciles y apoyarme incondicionalmente aun cuando todo parecía imposible. A mis abuelos y casi hermano Javier por brindarme todo su apoyo y no dudar nunca de mis decisiones..
(6) iii. AGRADECIMIENTOS. A mis padres que con sacrificio y dedicación han hecho de mi la persona que soy. A mis amigas de todos los años Laura y Leya, por su compañía a pesar de la distancia, por tanto cariño, por tanto detalles hacia mí y sobre todo, por escucharme cada vez que quiero y necesito hablar con alguien. A todas las personas que me han dicho que siga a pesar de los momentos difíciles a lo largo de estos siete años. Y a los que se empeñaron en obstaculizar mi camino, agregando trabas para que desistiera, también les doy las gracias, porque intentando lo contrario me hicieron cada vez más fuerte..
(7) iv. TAREA TÉCNICA. 1) Estudiar el mecanismo de operación multicanal definido por el protocolo IEEE 1609.4. 2) Estudiar las principales herramientas usadas por la comunidad científica para simular comunicaciones vehiculares. 3) Definir una herramienta de simulación realista que permita modelar escenarios vehiculares IEEE 1609.4 sobre mapas reales. 4) Diseñar experimentos que permitan evaluar la influencia de la operación multicanal de IEEE 1609.4 sobre las comunicaciones vehiculares. 5) Evaluar el impacto del intervalo CCH de IEEE 1609.4 sobre el desempeño de las comunicaciones vehiculares. 6) Confección del informe final.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. En el presente trabajo se estudia el impacto que presenta el intervalo de conmutación sincrónica de canal definida en el estándar IEEE 1609.4 sobre el desempeño de las Redes Ad-Hoc Vehiculares. Para ello, se realiza una revisión bibliográfica del tema, se destacan las principales características y el funcionamiento de los protocolos IEEE 802.11p/1609.4. Se presenta el simulador de comunicaciones vehiculares Veins que integra el simulador de red OMNeT++ y el simulador de tráfico vehicular SUMO, y se describen los experimentos que permiten evaluar la influencia de la operación multicanal. Las simulaciones se realizan en. dos entornos diferentes: el urbano y de autopista, definido por una porción de mapa real de la ciudad de Los Ángeles y de la autopista de Engelskirchen. El impacto del intervalo de conmutación sincrónica de canal se analiza para 50, 100 y 200ms, y en función de métricas como: número de colisiones promedio, probabilidad de recepción exitosa y demora de extremo a extremo. Según los resultados, el uso de un intervalo mayor de conmutación sincrónica de canal que el definido en IEEE 1609.4 impacta de forma negativa en el desempeño de las redes ad-hoc vehiculares.
(9) vi. TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. Definición y componentes de las VANET ................................................ 4. 1.1.. Componentes de una red vehicular .......................................................................... 5. 1.2.. Características de las VANETs ................................................................................ 6. 1.3.. Desafíos fundamentales en VANETs....................................................................... 8. 1.4.. Requerimientos para las aplicaciones VANETs ...................................................... 9. 1.4.1. Aplicaciones en seguridad vial ......................................................................... 9. 1.4.2. Aplicaciones de gestión de tráfico y monitorización ...................................... 11. 1.4.3. Aplicaciones de valor añadido ........................................................................ 12. 1.5.. Patrones de comunicación ...................................................................................... 13. 1.5.1. Beaconing ....................................................................................................... 14. 1.5.2. Geobroadcast .................................................................................................. 14. 1.5.3. Encaminamiento Unicast ................................................................................ 15.
(10) vii 1.5.4. Diseminación Avanzada de Información ........................................................ 16. 1.5.5. Agregación de información ............................................................................ 17. 1.6.. Arquitectura WAVE y protocolos IEEE 1609.4/802.11p ...................................... 18. 1.7.. Conclusiones parciales ........................................................................................... 22. CAPÍTULO 2.. Herramientas y escenarios de simulación ................................................ 23. 2.1 Desafíos de simulación ............................................................................................... 23 2.2 Modelos de movilidad ................................................................................................ 24 2.2.1 2.3. Modelos aleatorios .......................................................................................... 26. Descripción de las herramientas de simulación ..................................................... 27. 2.3.1. Simulador de red: OMNet++ .......................................................................... 27. 2.3.2 Simulador de tráfico: SUMO ............................................................................... 28 2.3.3. Simuladores dedicados: MOVES ................................................................... 30. 2.3.4 Simulador híbrido: Veins ..................................................................................... 31 2.4. Escenarios y parámetros de simulación ................................................................. 32. 2.4.1 Entorno urbano: Los Ángeles .............................................................................. 32 2.4.2 Entorno autopista ................................................................................................ 34 2.5 Parámetros de simulación ........................................................................................... 36 2.6 Métricas de desempeño ............................................................................................... 38 2.7 Conclusiones parciales ................................................................................................ 38 CAPÍTULO 3.. Interpretación, análisis y comparación de los resultados ........................ 40. 3.1 Entorno urbano ........................................................................................................... 40 3.1.1 Número de colisiones........................................................................................... 40 3.1.2 Probabilidad de recepción exitosa ....................................................................... 42 3.1.3 Demora de extremo a extremo ........................................................................... 45.
(11) viii 3.2 Entorno de autopista ................................................................................................... 47 3.2.1 Número de colisiones........................................................................................... 47 3.2.2 Probabilidad de recepción exitosa. ...................................................................... 49 3.2.3 3.3. Demora de extremo a extremo .......................................................................... 51. Conclusiones del capítulo ...................................................................................... 53. CONCLUSIONES Y RECOMENDACIONES ................................................................... 55 Recomendaciones ............................................................................................................. 56 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 57 ANEXOS .............................................................................................................................. 60 Anexo I Anexo II. Aplicaciones de seguridad vial ....................................................................... 60 Aplicaciones de gestión de tráfico y monitorización .................................. 61. Anexo III Aplicaciones de valor añadido ......................................................................... 62.
(12) INTRODUCCIÓN. 1. INTRODUCCIÓN. En años recientes, las redes ad-hoc móviles (MANET, Mobile Ad-Hoc Network) han estado continuamente atrayendo la atención por su uso potencial en diversos campos. Las redes ad-hoc vehiculares (VANETs, Vehicular Ad-Hoc Networks) es una rama de las MANET que pueden ser consideradas como una de las tecnologías de mayor importancia para establecer los futuros sistemas de transporte inteligente (ITS, Intelligent Transportation Systems). Una VANET está constituida por un conjunto de vehículos que se comunican entre sí, mediante interfaces inalámbricas, con ayuda de un sistema de posicionamiento y sin la necesidad de una infraestructura de red fija[1].El objetivo principal por el cual fueron creadas este tipo de redes, es para proveer soporte a aplicaciones de seguridad vial y eficiencia del tráfico, aunque también puede usarse para otros fines de valor añadido como aplicaciones de información y entretenimiento. En las redes vehiculares, los nodos emplean tecnologías de comunicación de corto alcance para intercambiar información. Esto se realiza a través de la difusión periódica de mensajes de un salto (single-hop broadcast) llamados beacon, que incluyen datos como la posición, velocidad y aceleración del vehículo. Como resultado, cada vehículo tiene conocimiento del estado de los otros que están dentro de su rango de transmisión. La idea es que un nodo conociendo el entorno puede mitigar situaciones potencialmente peligrosas[2]. De allí que las aplicaciones enfocadas a la seguridad vial constituyan las más importantes y críticas en el ámbito de estas redes. IEEE 802.11p [29] es el estándar definido para el control de acceso al medio (MAC, Medium Access Control) y la capa física (PHY, Physical Layer) en el conjunto de protocolos de acceso inalámbrico en entornos vehiculares (WAVE, Wireless Access in Vehicular Environments). Este protocolo representa una alternativa a los estándares Wi-Fi.
(13) INTRODUCCIÓN. 2. actuales, su está desarrollo dirigido a proveer comunicaciones robustas y de baja latencia en escenarios vehiculares de alta movilidad y elevado dinamismo en la topología de red. IEEE 1609.4 [28] complementa el funcionamiento de la capa MAC IEEE 802.11p para proveer coordinación entre los múltiples canales del espectro. En las redes vehiculares la información que se intercambia entre los diferentes nodos de la red puede repercutir en la habilidad del sistema para preservar vidas humanas, por tanto, cualquier solución tecnológica debe ser probada exhaustivamente antes de su integración en un sistema real. En particular, IEEE 1609.4 es un estándar en prueba que especifica la operación multicanal de los nodos WAVE y opera sobre la capa MAC IEEE 802.11p. Este estándar implementa la operación multicanal, dividiendo el tiempo de acceso disponible entre un canal de control (CCH, Control Channel) y uno de los canales de servicio (SCH, Service Channel) en intervalos de 50 ms [3]. Durante los intervalos CCH, los vehículos sintonizan el canal de control y pueden transmitir mensajes de enrutamiento o beacon, relacionados con seguridad y servicios de publicidad WAVE (WSA, WAVE Service Advertisements). Mientras que en los intervalos SCH, los nodos pueden sintonizar uno de los seis canales de servicio para aplicaciones que no están relacionadas con la seguridad. Como resultado, la controversia entre aplicaciones de seguridad y de valor añadido no se produce en las VANETs con operación multicanal 1609.4. Sin embargo, varios trabajos de investigación[4-6] muestran que reducir el ancho de banda disponible podría comprometer seriamente el desempeño de las aplicaciones vehiculares en escenarios reales. Teniendo en cuenta lo anterior, se plantea el siguiente problema científico: ¿Qué impacto presenta el valor del intervalo de tiempo definido por IEEE 1609.4 para el canal de control (CCH) en el desempeño de las comunicaciones vehiculares? Partiendo de esta situación se plantea como objetivo general: Evaluar el impacto del intervalo de tiempo definido por IEEE 1609.4 para el canal de control (CCH) en el desempeño de las VANETs. Para dar cumplimiento al objetivo general del trabajo se enuncian los siguientes objetivos específicos:.
(14) INTRODUCCIÓN. 3. 1. Describir la operación multicanal planteada por el protocolo IEEE 1609.4 para la comunicación en entornos vehiculares. 2. Diseñar experimentos que muestren el impacto del tamaño del intervalo CCH de IEEE 1609.4 sobre el desempeño de las comunicaciones vehiculares. 3. Simular el impacto del tamaño del intervalo CCH de IEEE 1609.4, con la consecuente discusión y análisis de los resultados obtenidos. Organización del informe El desarrollo de la tesis se estructura en tres capítulos. El primer capítulo presenta los fundamentos teóricos relacionados con las características generales de las redes ad-hoc vehiculares y se describen los principales aspectos de los protocolos IEEE 802.11p/1609.4 que definen el funcionamiento de la capa MAC y PHY, e incluye los conceptos que se utilizarán en el desarrollo de la investigación; además se tienen en cuenta las posiciones teóricas que se asumen para enfrentar el problema En el segundo capítulo se exponen los elementos referidos al diseño metodológico de la investigación, a partir de las herramientas de trabajo OMNeT++, SUMO y Veins. Que de acuerdo al estado del arte son las de mejor prestaciones que se utilizan para realizar las simulaciones y se presenta el diseño de los experimentos, basados en la densidad y la velocidad de los nodos. En el tercer capítulo se evalúan mediante la simulación el desempeño de los protocolos IEEE 802.11p/1609.4 en escenarios vehiculares reales, en función de la densidad y velocidad de los nodos para las diferentes razones de beacon..
(15) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 4. CAPÍTULO 1. Definición y componentes de las VANET. Las VANET son redes ad-hoc móviles capaces de comunicar información entre diversos vehículos colindantes y el sistema de tráfico. Una red ad-hoc vehicular está formada por un conjunto de nodos que se comunican entre sí mediante enlaces inalámbricos sin la necesidad de una infraestructura de red fija. Cada nodo actúa como router y tiene capacidades de encaminamiento para redirigir paquetes hacia su destino. Los nodos se corresponden con vehículos (automóviles, camiones, autobuses, etc.) y forman la red en pleno movimiento (por ejemplo mientras se circula por una autopista o zona urbana), por tanto, los nodos se mueven de forma arbitraria y se comunican entre ellos (vehículo-vehículo,V2V), pudiendo comunicarse también con un equipo fijo próximo a la vía que forme parte de la red y que dotará a dicha red de una conexión hacia o desde Internet (vehículo-infraestructura V2I e infraestructura-vehículo I2V)[7, 8],lo descrito anteriormente se muestra en la figura 1.1. El objetivo principal de una red VANET es proporcionar seguridad vial y eficiencia en el transporte, aunque también puede usarse con otros fines: comerciales, acceso a Internet, etc.. Figura 1.1: Infraestructura y componentes de una red vehicular.
(16) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 1.1.. 5. Componentes de una red vehicular. Varios proyectos de investigación en Estados Unidos, Europa y Japón [9-11] han especificado algunas consideraciones relacionadas a las arquitecturas propuestas para VANETs con el objetivo de lograr un correcto despliegue de las aplicaciones concebidas para el ámbito vehicular. Estas incluyen la presencia de equipos en los vehículos (OBUs, On-Board Units) y entidades físicas o subsistemas situados al borde de la carretera (RSUs, Road-Side Units). Una OBU es un dispositivo que permite la comunicación V2V-V2I. Esta proporciona servicios de comunicación a las unidades de aplicación (AUs, Application Units) y es capaz de encaminar datos provenientes de otras OBUs que se encuentran en el dominio ad-hoc. Una OBU se debe equipar con al menos un dispositivo de red para la comunicación inalámbrica de corto alcance basada en la tecnología de radio IEEE 802.11p. Este dispositivo de red se usa para enviar, recibir y reencaminar datos pertenecientes a las aplicaciones de seguridad vial. Las OBUs también se pueden equipar con más dispositivos de red basados en otras tecnologías de radio como IEEE 802.11a/b/g/n, para las comunicaciones de aplicaciones que no están relacionadas con la seguridad[12].Estos componentes los podemos apreciar en la figura 1.2.. Figura 1.2: Equipamiento que conforma una OBU Una AU es una entidad situada dentro del vehículo que permite ejecutar aplicaciones las cuales pueden utilizar las capacidades de comunicación de la OBU. Ejemplos de AUs son: . Un dispositivo dedicado para aplicaciones de seguridad vial como avisos de peligro.. . Un sistema de navegación con capacidad de comunicación.. . Un dispositivo móvil (PDA - Asistente Personal Digital o Smartphone) que permita ejecutar aplicaciones de Internet..
(17) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 6. Una AU se puede construir dentro del vehículo estando conectada de forma permanente a una OBU. Esto asegura que un conjunto mínimo de aplicaciones siempre se esté ejecutando en el vehículo. Otros tipos de AUs pueden ser dinámicamente conectadas a la red interna del vehículo, por ejemplo, el PDA de un pasajero. Múltiples AUs pueden estar conectadas simultáneamente a un solo OBU compartiendo el procesamiento y los recursos inalámbricos del mismo. Una RSU es un dispositivo que se encuentra ubicado en posiciones fijas a lo largo de carreteras y autopistas, o en puntos importantes como gasolineras, aparcamientos y restaurantes. La RSU debe estar equipada con al menos un dispositivo de red para la comunicación inalámbrica de corto alcance basada en la tecnología de radio IEEE 802.11p. También puede estar equipada con otros dispositivos de red inalámbricos para permitir comunicaciones con una red basada en infraestructura. Las funciones principales de una RSU son: . Proveer aplicaciones de seguridad vial que utilizan la comunicación I2V (Ej. aviso de túnel bajo, aviso de zona de trabajo, aviso de malas condiciones de la carretera).. . Proporcionar a las OBUs conectividad a Internet, así como enlace con las redes basadas en infraestructura.. . Extender el rango de comunicación de la red ad-hoc por medio de la redistribución de información hacia las OBUs.. . Cooperar con otras RSUs en el encaminamiento o distribución de información relacionada a la seguridad.. 1.2.. Características de las VANETs. Aunque las redes ad-hoc vehiculares comparten similitudes con las redes ad-hoc convencionales, existen varias características que las identifican como un caso particular. A continuación se describen las más relevantes[11]: Alta movilidad y cambios frecuentes en la topología: Los nodos pueden moverse con una alta velocidad a lo largo de carreteras y autopistas. Por lo tanto, en ciertas situaciones, tales como cuando los vehículos se pasan unos a los otros, el intervalo de tiempo que queda para el intercambio de información es bastante pequeño, típicamente en el orden de segundos. Además, los nodos intermedios que permiten una comunicación inalámbrica.
(18) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 7. multisalto se pueden mover rápidamente propiciando que la ruta establecida entre dos nodos se interrumpa con frecuencia. Aún, cuando en las redes VANETs los vehículos suelen seguir ciertos patrones de movimientos lo común es que la topología de red cambie rápidamente debido a la alta movilidad que presentan los nodos. Patrones de movimiento: Los movimientos de los vehículos se encuentran limitados por la topología de la carretera. Esto quiere decir que los vehículos no se mueven de manera arbitraria, sino que utilizan caminos predefinidos, comúnmente en dos direcciones. Los cambios impredecibles en las direcciones de los vehículos por lo general ocurren en las intersecciones de las carreteras. Se distinguen tres tipos principales de caminos que influyen directamente en el grado de previsibilidad de los movimientos de los nodos: vías internas de la ciudad, caminos rurales y autopistas. Densidad y heterogeneidad de nodos: La densidad de nodos es un aspecto clave en las redes VANETs debido a que el número de vehículos en un radio determinado puede variar considerablemente. En una situación de atasco de tráfico la red vehicular se puede clasificar como muy densa mientras que en un entorno suburbano la densidad de nodos podría ser escasa. Los nodos que participan en las aplicaciones previstas para VANETs se pueden agrupar en distintas clases y tipos. Una distinción básica se puede hacer entre vehículos y RSUs. Los vehículos pueden clasificarse como vehículos privados, de autoridad, de mantenimiento y construcción de carretera, etc. Es probable que algunas aplicaciones no se instalen en algunos, por ejemplo, en un vehículo de emergencia se sabe que lo fundamental es emitir advertencias sobre su acercamiento. La situación es similar para las RSU. Dependiendo de las capacidades de las unidades, los nodos de infraestructura simplemente pueden emitir datos a la redo tener una completa funcionalidad ad-hoc que les permita reenviar información como otros vehículos. Menor potencia y restricciones de procesamiento: En comparación con un teléfono móvil o PDA, se supone que los dispositivos de comunicación colocados de manera fija en los vehículos como las OBUs y AUs, sean más poderosos con respecto a las capacidades de procesamiento y memoria. Debido a que estos dispositivos están interconectados de manera permanente a la fuente de potencia del vehículo, el consumo de energía y las restricciones de procesamiento no son aspectos considerables sin embargo se deben minimizar en los dispositivos que su fuente de energía depende de una batería..
(19) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 8. Altos requerimientos de las aplicaciones: Importantes aplicaciones VANET tienen como objetivo contribuir a la seguridad vial evitando accidentes de tráfico. Estas aplicaciones tienen altos requerimientos con respecto al retardo y fiabilidad. Un retardo de extremo a extremo de segundos puede hacer que una información de seguridad pierda sentido. La pérdida de mensajes, por ejemplo, debido a la fluctuación de los enlaces o a los ataques de seguridad, puede afectar a decisiones de vida o muerte. Capacidad variable de los enlaces: En una red VANET cada nodo móvil es capaz de encaminar información, por lo que en una comunicación multisalto los datos para llegar a su destino deberán atravesar múltiples enlaces inalámbricos. La capacidad variable de estos enlaces tendrá un gran impacto en la calidad de la comunicación. No confidencialidad para las aplicaciones de seguridad: Para aplicaciones de seguridad la información contenida en un mensaje es de interés para todos los usuarios de la carretera, y por lo tanto no es confidencial. Privacidad: Las capacidades de comunicación en los vehículos pueden revelar información acerca del conductor / usuario, tales como identificador, velocidad, posición y los patrones de movilidad. A pesar de la necesidad de autenticación de mensajes y el no repudio de los mensajes de seguridad, la privacidad de los usuarios y los conductores se deben respetar, en particular la privacidad de localización y el anonimato[13-15]. 1.3.. Desafíos fundamentales en VANETs. Uno de los desafíos más importantes que se presentan en las redes VANETs es que no existe ningún sistema centralizado capaz de coordinar la comunicación. Aunque algunas aplicacionesimplican el uso de infraestructura (Ej. aviso de infracción grave, aviso de cruce de peatones, aviso de intersección peligrosa), otras aplicaciones se espera que funcionen de manera confiable con las comunicaciones descentralizadas. El hecho de que no se pueda asumir ninguna coordinación centralizada y que varias aplicaciones estarán transmitiendo informaciónde interés para muchos vehículos circundantes, permite deducir la necesidad de un canal de control único y compartido (incluso cuando múltiples canales estén disponibles debido al uso en los vehículos de uno o más transceivers, por lo menos un canal de control común es requerido). Este paradigmade un solo canal, junto con el requisito de control distribuido, conduce a algunos de los desafíos técnicos principales del diseño de VANETs.
(20) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 9. mencionados a continuación. . Altas velocidades y frecuente cambio de topología. . Falta de coordinación central. . Escalabilidad. . Impacto del nodo oculto y expuesto. 1.4.. Requerimientos para las aplicaciones VANETs. En una red VANETs las comunicaciones V2V, V2I e I2V permiten el despliegue de un grupo de aplicaciones dirigidas tanto al conductor como al resto de las personas que se encuentran dentro del vehículo. Estas aplicaciones ayudarían de forma inestimable en temas tan críticos como la seguridad vial y la eficiencia en el transporte. Comúnmente las aplicaciones VANETs se clasifican comoaplicaciones de seguridad vial, gestión del tráfico y monitorización, y aplicaciones de valor añadido. Las aplicaciones vehiculares presentan diferentes requerimientos desde el punto de vista del funcionamiento en red. A continuación se relacionan algunos de los más importantes [18]. . Localización. . Geocast. . Índice de penetración. . Bajo retardo. . Acceso permanente. 1.4.1. Aplicaciones en seguridad vial. Estas aplicaciones tienen como objetivo reducir la probabilidad de accidentes de tránsito y disminuir los daños y lesiones causadas por siniestros de tráfico. En éste escenario, los conductores son notificados con mensajes de alarma asociados a eventos en las carreteras, información sobre vehículos cercanos y manejo de incidentes. Constituyen sin lugar a dudas las más importantes y críticas debido a que su objetivo es disminuir el número de accidentes que ocurren en las carreteras. En el anexo 1 se muestran algunas de estas aplicaciones y el tipo de comunicación utilizada en cada una de ellas. En este contexto se está haciendo un gran esfuerzo por parte de diferentes instituciones en todo el mundo para lograr el desarrollo e implementación de.
(21) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 10. este tipo de aplicaciones con el propósito de crear una solución técnica unificada que permita la comunicación V2V y V2I de una forma continua y transparente usando localización mejorada, definir y validar una arquitectura abierta para un conjunto de aplicaciones cooperativas y desarrollar un núcleo de componentes que soporte modelos cooperativos para aplicaciones en tiempo real dirigidas a los conductores, operadores y la industria. Las aplicaciones de seguridad se pueden agrupar en tres subcategorías [21]: Mecanismos anti-colisión: estos sirven para detectar posibles obstáculos en la carretera. El objetivo fundamental de una aplicación de este tipo consiste en el aviso mediante señales acústicas al conductor de la presencia de un vehículo que se acerca a una velocidad peligrosa para ese entorno o de un objeto que se encuentra limitando la circulación por la vía. Esta aplicación requiere una gran rapidez a la hora de establecer el enlace y el tema del encaminamiento no es crucial debido a que generalmente la comunicación se establecerá entre vehículos con visión inalámbrica directa sin nodos intermedios. Para un correcto funcionamiento sería necesario instalar en los vehículos de los usuarios equipos que envíen a sus vecinos información de posición, trayectoria y velocidad, así como un mecanismo que constantemente escuche la información enviada por el resto de los vehículos y la infraestructura. Aviso de peligro: las aplicaciones de este tipo se utilizan para detectar posibles eventos peligrosos e informar al resto de los vehículos de la red. Los sensores pueden detectar un peligro y alertar al conductor con una breve descripción o el conductor puede detectar el peligro y a través de una interfaz vocal describirlo para el resto de los usuarios. Podría resultar de interés transmitir información hacia todos los usuarios de la red para informar por ejemplo la rotura de un semáforo o la presencia de un vertido de aceite en una curva cerrada de la vía por donde se está circulando. Por otra parte, se puede necesitar mandar información solamente a los usuarios que transitan por cierta región para anunciar un evento determinado. Por tanto, es necesario que los vehículos soporten protocolos broadcast y geocast que no sobrecarguen la red con mensajes de control para que la información llegue al destino de manera eficiente y rápida. Llamada de emergencia (e-call): esta aplicación consiste en realizar una llamada desde el vehículo a un número de emergencia en caso de accidente. El vehículo implicado en el.
(22) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 11. accidente transmite una llamada de urgencia al centro de recepción de llamadas más adecuado y envía al mismo tiempo, varios datos como por ejemplo su localización exacta. El sistema se basa en el empleo del número de urgencia único europeo 112, que permitirá garantizar su interoperabilidad en toda la UE. La llamada de emergencia puede ser generada de forma manual por alguno de los ocupantes del vehículo o automáticamente, en caso de accidente grave, mediante la activación de sensores instalados en el vehículo. El requisito fundamental es la necesidad de comunicación, en cualquier lugar y bajo cualquier circunstancia, por lo que son imprescindibles tecnologías que proporcionen una cobertura global en las carreteras. La importancia de la aplicación radica en alertar de manera rápida a los servicios de urgencias de la ubicación exacta del accidente, lo que permitirá reducir considerablemente el tiempo de respuesta de dichos servicios. 1.4.2. Aplicaciones de gestión de tráfico y monitorización. Las aplicaciones enmarcadas en esta categoría son las que tienen como meta eliminar o reducir los atascos que se producen en zonas urbanas o secciones de una carretera a través de la monitorización y redistribución del tráfico por rutas menos pobladas. Reducir el tiempo perdido en atascos o mejorar el flujo de tráfico implica disminuir la contaminación medioambiental causada por el funcionamiento de los vehículos, ahorro de combustible y dinero, menor destrucción del paisaje debido a la necesidad de construir más carreteras, decremento del tiempo de viaje, disminución de la congestión y menor cantidad de accidentes. Para algunas de estas aplicaciones, las RSU se consideran un prerrequisito, mientras que en otras solamente es necesario la comunicación V2V, como se ve en el anexo 2. De acuerdo a su función, las aplicaciones de eficiencia se dividen en tres subcategorías[22]: Monitorización del tráfico: el monitoreo del tráfico constituye una herramienta de gran importancia debido a que puede proporcionar información oportuna de alta resolución relacionada con la distribución del tráfico existente varias millas alrededor de la posición exacta de un vehículo. En esta aplicación cada nodo del sistema deberá actuar como un sensor (determinando su velocidad), como un nodo intermedio (si la información debe viajar por más de un enlace de transmisión directa) así como un nodo destino (usando la información proveniente de los otros vehículos en el sistema). La información puede ser.
(23) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 12. usada simplemente para alertar al conductor o, en sistemas más complejos, reencaminar, estimar el tiempo al destino, o incluso controlar el tráfico usando límites adaptativos de velocidad. Aviso de atascos de tráfico: esta aplicación aportará a mediano o largo plazo una forma segura y ágil de recibir información confiable relacionada a los atascos de tráfico que se pueden producir en una zona determinada. El conductor del vehículo podrá contar con un sistema capaz de informar el momento y lugar exacto donde se está produciendo un atasco y cuáles son las rutas alternativas para llegar al destino. La propuesta para la detección de atascos se podría basar en que los sensores de uno o más vehículos indiquen que en su proximidad el número total de vehículos excede un umbral y que la velocidad de esos vehículos se encuentra por debajo de otro umbral, entonces tras la recepción de un aviso de este tipo el conductor puede optar por una ruta no congestionada o extremar precauciones. Conducción cooperativa: otra aplicación desplegable gracias a una plataforma de comunicaciones V2V es la conducción cooperativa. Esta aplicación tiene como objetivo asistir y coordinar el tráfico en determinados puntos de una zona urbana, rural o autopista. Cuando múltiples vehículos pretenden atravesar un punto crítico común como puede ser un cruce sin señalización o el acceso a una autopista, el conductor podrá contar con un sistema capaz de lograr que dichos vehículos cooperen de forma conjunta para evitar accidentes. La cooperación se podría implementar a través de comunicaciones en grupo donde todos los vehículos implicados participarían en la toma de decisiones[21]. 1.4.3. Aplicaciones de valor añadido. Varias aplicaciones se pueden agrupar bajo este término. Aquí el centro de atención está en proporcionar aplicaciones para los ocupantes del vehículo relacionadas con el acceso a Internet, obtención de información en tiempo real del estado de las plazas de aparcamiento, hoteles y restaurantes en diferentes ciudades, pago electrónico, información sobre el estado del tiempo y descarga de mapas cartográficos de diferentes zonas. Estas aplicaciones son menos importantes que las relacionadas con la seguridad o eficiencia en el transporte, pero también aportan ventajas al sector del automovilístico, como se refleja en el anexo 3. Acceso a Internet: las RSUs proveen acceso a Internet desde los vehículos haciendo posible que los usuarios conozcan las condiciones meteorológicas del destino, reserven en.
(24) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 13. un hotel e incluso descarguen música, video y juegos. Actualización de software: las RSUs que tienen conexión a la red global serán capaces de garantizar el intercambio de datos entre los vehículos y centros de aprovisionamiento de software. Juegos distribuidos: estas aplicaciones de entretenimiento comprenden la gestión de actividades entre un grupo limitado de vehículos en un modo distribuido y vía V2V. Aplicaciones punto a punto: usando estas aplicaciones es posible compartir información entre los vehículos sin la presencia de un servidor. Aplicaciones como mensajería instantánea, transferencia de archivos y voz sobre IP son las más consideradas. Información cartográfica: a través de las RSUs se le provee a los vehículos acceso a un servidor de Internet para descargar un mapa nuevo o actualizar uno existente. Gestión de aparcamientos: esta aplicación permite que los conductores localicen y reserven un aparcamiento libre. Los usuarios desde el propio vehículo y en ruta podrán comunicarse con el aparcamiento destino, notificarle la hora aproximada de llegada y reservar una de las plazas. El sistema del aparcamiento por su parte aceptará la petición, facturará el cargo (si procede) e indicará al usuario como llegar hasta su plaza. Pago electrónico: esta aplicación permite el pago en plazas de peaje usando sistemas automatizados que aumentan la eficiencia operacional. El objetivo es gestionar de manera automática el pago, eliminar problemas de retenciones y ahorrar tiempo a los conductores evitándoles parar en estas zonas[23]. 1.5.. Patrones de comunicación. Los modos de operación de las aplicaciones propuestas para VANETs muestran que el mecanismo de comunicación establecido en prácticamente cada una de ellas se puede asociar a un patrón de comunicación específico. Estos se pueden ver como una especie de modelos de diseño sobre los cuales las futuras aplicaciones vehiculares pudieran ser construidas. Para la definición de cada patrón sólo se asume la disponibilidad de los mecanismos unicast y broadcast de la capa de enlace. A continuación, se describen cada uno de ellos atendiendo a las siguientes características: propósito, mecanismo, activación, dirección, datos y calidad de servicio..
(25) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 1.5.1. 14. Beaconing. Este patrón de comunicación se caracteriza por el intercambio continuo de información entre nodos vecinos con el objetivo de actualizar datos que son esenciales para el funcionamiento de las aplicaciones (Ej. posición y velocidad de los vehículos). Los datos se envían a todos los nodos vecinos en un rango de recepción mediante los mecanismos de difusión (broadcast) de la capa de enlace. La comunicación se produce a través de un solo salto (single-hop), los paquetes de datos se envían de forma periódica y la información típicamente no se reenvía, ni después de procesada por la aplicación, en la figura 1.6 se observa cómo el vehículo (F) realiza difusión periódica de mensajes de un solo salto En ocasiones el patrón de comunicación se puede iniciar debido a un suceso externo como puede ser la ocurrencia de un accidente. En tales casos la información solo se adiciona a los paquetes regulares. La comunicación es estrictamente unidireccional aún cuando cada nodo sea capaz de usar beaconing. Los datos que se generan en el transmisor se obtienen utilizando un sensor local. Muchas de las aplicaciones que usan este patrón de comunicación tienen requerimientos de latencia de rango medio. La información del estado de los nodos vecinos necesita ser actualizada al menos en escala de segundos[24]. F. Figura 1.6: Beaconing 1.5.2. Geobroadcast. Tiene como propósito la distribución inmediata de información en un área grande (Ej. para informar a los vehículos que se encuentran en una zona sobre un acontecimiento repentino o condición inusual de la carretera que requiera atención por parte de los conductores. El transmisor determina una región destino para la información a ser enviada. Entonces el mensaje se envía a través de los mecanismos de difusión (broadcast) de la capa de enlace a todos los nodos vecinos en un rango de transmisión. Cada receptor que se encuentra ubicado dentro de la región destino reenvía el mensaje vía broadcast hasta que se cubre toda la zona geográfica, ver figura 1.7. En situaciones con altas densidades de nodos, el esquema de reenvío de información se debe optimizar para reducir redundancia[25]..
(26) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 15. Los mensajes Geobroadcast son típicamente enviados sobre un cierto acontecimiento externo, o sea, no se envían de forma continua, aunque puede darse el caso en que se necesite una difusión periódica (Ej. en caso de una advertencia de zona de trabajo). Los mensajes son unidireccionales y contienen datos que son establecidos por el transmisor (Ej. en caso de un accidente, el vehículo afectado detecta esta situación usando sensores locales y puede enviar un mensaje de advertencia apropiado). Los mensajes Geobroadcast con frecuencia requieren muy baja latencia para informar a los vehículos en una zona determinada tan rápido como sea posible. Algunas aplicaciones como la advertencia de zona de trabajo mencionada anteriormente tienen requerimientos menos estrictos, pero otras como el aviso de accidente pueden necesitar una razón de pérdida de paquetes lo más baja posible. F. Figura 1.7: Geobroadcast: El vehículo (F) inicia la diseminación multisalto de un mensaje dentro de una región geográfica destino. 1.5.3. Encaminamiento Unicast. Permite el transporte de datos por la red ad-hoc hacia un destino específico (otro vehículo o RSU). El objetivo es usar la red para el transporte de mensajes unicast. La comunicación se puede realizar a través de un solo salto o el mensaje se puede encaminar hacia el nodo destino sobre múltiples saltos. Para el encaminamiento multisalto se pueden usar varios esquemas de encaminamiento propuestos para redes ad-hoc. Los enfoques de encaminamiento basados en la posición han mostrado un desempeño mayor que los basados en la topología, debido a que se adaptan más fácilmente a la alta dinámica de movimiento de nodo que existe en VANETs[25]. El uso del encaminamiento unicast puede tener varios motivos, pero en la mayoría de los casos, los paquetes se envían debido a acontecimientos internos del sistema o interacciones manuales de los usuarios. El transporte de paquetes unicast puede ser uni o bidireccional. El caso bidireccional se usa para las aplicaciones que necesitan comunicación orientada a la conexión mientras el unidireccional se utiliza para aplicaciones de advertencia. Los.
(27) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 16. paquetes transportan datos arbitrarios, determinados por el transmisor y que no se alteran por el proceso de encaminamiento. Debido a que muchas aplicaciones que usan encaminamiento unicast no tienen relación inmediata a la seguridad, la prioridad de los paquetes correspondientes es normalmente inferior comparado con los datos de las aplicaciones de seguridad. Incluso entre los paquetes unicast, se puede establecer una jerarquía de prioridad. F. D. Figura 1.8: Encaminamiento unicast: Comunicación multisalto entre dos vehículos F (fuente) y D (destino). 1.5.4. Diseminación Avanzada de Información. La diseminación de información entre vehículos durante un cierto tiempo permite conectar particiones de red y priorizar información. El objetivo es proveer información a vehículos que llegan después de un intervalo de tiempo determinado y que previamente no habían sido alcanzados debido al fraccionamiento de la red. En este caso se debe considerar el dimensionamiento del ancho de banda para dar prioridad a los mensajes del contexto actual del vehículo, o sea, la diseminación solo debe enviar mensajes con alta prioridad si el ancho de banda es escaso. Los esquemas para la diseminación avanzada de mensajes con frecuencia usan difusión (broadcast) de un solo salto, estos almacenan los mensajes y los reenvían múltiples veces, considerando varios parámetros para determinar el momento de la transmisión. La diseminación de mensaje adaptable de contexto utiliza un método diferente. Aquí el transmisor coloca los mensajes de todas las aplicaciones correspondientes en una cola común y cada mensaje se tasa según su importancia en el contexto actual. Los mensajes se envían siguiendo un orden de relevancia por lo que la información se extiende según su importancia contextual y adaptada a las restricciones de ancho de banda. Los mensajes se inyectan en el sistema debido a eventos o al descubrimiento de información. La comunicación es unidireccional y no se encuentran involucrados protocolos bidireccionales ni respuestas. Los datos originales del mensaje creado por la fuente no se cambian nunca..
(28) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 17. Sin embargo, se deben adjuntar al mensaje datos adicionales para determinar el nivel de relevancia. En la diseminación de mensaje adaptable de contexto se incluye implícitamente la priorización. Los mecanismos consideran que es más importante una diseminación extendida y estable en el tiempo que una baja latencia.. F. Figura 1.9: Diseminación avanzada de mensajes. 1.5.5. Agregación de información. A diferencia de los otros patrones, los datos transmitidos se procesan y fusionan por los nodos de la red y no se reenvían simplemente. El objetivo es difundir mensajes entre vehículos al igual que en la diseminación avanzada de información. Sin embargo, se puede reducir la sobrecarga de comunicación generada cuando los eventos se detectan por varios vehículos debido a que la agregación de información elimina redundancia en la transmisión. Evitar sobrecarga en la red trae consigo una disminución en la probabilidad de colisión y un aumento en la razón de entrega de paquetes. Debido a esto, más ancho de banda está disponible para la difusión de distintas informaciones actuales. Para algunas aplicaciones, la agregación puede mejorar la calidad de la información (Ej. Cuando varios vehículos detectan un evento específico como puede ser un atasco de tráfico). El componente central de los esquemas de agregación de información es una base de conocimientos, que se aumenta con información del propio vehículo y los datos remotos coleccionados por otros vehículos. Parte del conocimiento se comparte a través del envío regular de mensajes bajo petición. La comunicación puede ser mediante un solo salto o multisalto. La información entrante al receptor contribuye a la base de conocimiento local desde la cual se crean los nuevos mensajes con información agregada. El mecanismo se puede iniciar debido a la detección de un nuevo evento. La dirección de la comunicación no se puede distinguir de una forma clara. Los datos transmitidos contienen información agregada que se deriva de múltiples fuentes. La agregación maneja información en vez de mensajes. Por lo tanto, la calidad de la información y su convergencia dentro de la red son mejores métricas en este caso. Sin.
(29) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 18. embargo, esto también implica que la agregación de información no puede ser utilizada en mensajes de aplicaciones muy sensibles al tiempo como frenado de emergencia o advertencia de accidente.. Figura 1.10: Agregación de información: Los valores numéricos significan abstracciones de paquetes que presentan una distribución eficiente de la información. 1.6.. Arquitectura WAVE y protocolos IEEE 1609.4/802.11p. En 1999 la Comisión Federal de Comunicaciones (FCC, Federal Communications Commission) de Estados Unidosasignó75MHz del espectro en la banda de 5,9GHz destinados a las comunicaciones dedicadas de corto alcance (DSRC, Dedicated Short Range Communications) para dar soporte a los ITS. Los 75 MHz de la banda se extienden desde 5.850 GHz hasta 5.925 GHz y se dividen en 5 MHz de banda de guarda más siete canales de 10 MHz cada uno. El canal de control (CH 178) está reservado para aplicaciones relacionadas a la seguridad y para el intercambio de mensajes de control, los dos canales en los extremos de la banda (CH 172, CH 184) están reservados para usos especiales y los cuatro canales de servicio restantes (CH 174, CH 176, CH 180, CH 182) pueden ser empleados por aplicaciones relacionadas o no a la seguridad. También existe la posibilidad de combinar canales de servicio adyacentes para formar dos canales de 20 MHz; CH 175 (combinación de CH 174 y CH 176) y CH 181 (combinación de CH 180 y CH 182), lo cual permite obtener razones de datos superiores a las alcanzadas con un canal de 10 MHz. En la figura 1.11 se muestra una representación de la distribución de la banda [26]. Al tomar como referencia la banda de frecuencias de la Figura 1.11 los grupos de trabajo IEEE 1609 e IEEE 802.11p especificaron un conjunto de protocolos conocidos como WAVE para el acceso inalámbrico en entornos vehiculares. Existen cuatro subestándares en la familia 1609 denominados IEEE 1609.1, 2, 3, 4 los cuales se encargan de manejar un grupo de aspectos que son esenciales para el funcionamiento de las distintas capas de la.
(30) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 19. arquitectura. IEEE 1609.1 [27] detalla las actividades de gestión requeridas para una correcta operación de las aplicaciones vehiculares. 1609.2 [28] provee los elementos a tener en cuenta para establecer una comunicación segura. 1609.3 [29] especifica un protocolo de mensajes cortos (WSMP, Wave Short Messages Protocol) para manejar el tráfico de las aplicaciones relacionadas a la seguridad en las capas de red y transporte. 1609.4[30] define la coordinación entre los múltiples canales del espectro, mientras que la combinación de 1609.4 e IEEE 802.11p [31] describe el funcionamiento de la capa MAC y física. En la Figura 1.12 se muestra una representación de la arquitectura WAVE y su relación con la capa MAC y física IEEE 802.11p.. Figura 1.11: Conjunto de canales definidos en el estándar WAVE para la operación multicanal en entornos vehiculares. Figura 1.12: Arquitectura IEEE 1609.4 (WAVE) y su relación con el IEEE 802.11p.
(31) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 20. El protocolo IEEE 1609.4 complementa el funcionamiento de la capa MAC IEEE 802.11p para proveer coordinación entre los múltiples canales del espectro. IEEE 1609.4[30] define que los dispositivos de radiocomunicación WAVE deben sintonizar el canal de control por un intervalo de tiempo CCH, y después conmutar a alguno de los canales de servicio donde pueden transmitir y recibir datos durante el intervalo de tiempo SCH, como se muestra en la Figura 1.13. El monitoreo del canal de control se repite cada un tiempo conocido como intervalo de sincronismo y al inicio de cada ranura CCH o SCH se añade un intervalo de guarda para eliminar las inexactitudes que se presentan debido a las diferentes velocidades de conmutación de los dispositivos de radiocomunicación. La conmutación sincrónica de canal entre todos los nodos de la red se logra mediante una base de tiempo universal coordinada (UTC, Coordinated Universal Time) como puede ser los datos proporcionados por el sistema de posicionamiento global (GPS, Global Positioning System) [20].. Figura 1.13: Intervalos de sincronismo, guarda, CCH y SCH utilizados en la operación multicanal del protocolo IEEE 1609.4 IEEE 802.11p [32]constituye el estándar de clave para el control de acceso al medio (MAC) y la capa física (PHY) en el conjunto de protocolos WAVE. A su vez, representa una alternativa a los estándares Wi-Fi actuales, estando su desarrollo dirigido a proveer comunicaciones robustas y de baja latencia en escenarios vehiculares de alta movilidad y elevado dinamismo en la topología de red. La capa MAC de IEEE 802.11p utiliza acceso múltiple con censado de portadora y evitación de colisión (CSMA/CA, Carrier Sense Multiple Access with Collision Avoidance) para proporcionar acceso justo al canal y reducir.
(32) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 21. las colisiones. Además, se basa en la operación multicanal del protocolo IEEE 1609.4 y en la función acceso al canal distribuido mejorado (EDCA, Enhanced Distributed Channel Access) del estándar IEEE 802.11e. El mecanismo EDCA de 802.11p provee calidad de servicio (QoS, Quality of Service) a través de la utilización de cuatro categorías de acceso (ACs, Access Categories) por cada canal CCH o SCH, como se aprecia en la figura 1.14. Las categorías de acceso, denotadas por AC_BK, AC_BE, AC_VI, AC_VO, se relacionan con cuatro clases de tráfico y cada una de ellas presenta una cola y un proceso de contención independiente. En la tabla 1.1 se muestran los parámetros de contención y las clases de tráfico correspondientes a las categorías de acceso para cada canal CCH o SCH. Durante la transmisión de los datos cada trama se enmarcan en una de las categorías de acceso atendiendo al nivel de prioridad de la información, y se llevan a cabo dos procedimientos de disputa para acceder al medio: mecanismo de disputa interior que ocurre dentro de cada canal entre sus categorías de acceso y mecanismo de disputa exterior que ocurre entre los canales de los distintos nodos[26].. Figura 1.14: Relación entre la operación multicanal y priorización del tráfico con distintas categorías de acceso (ACs) en la capa MAC de IEEE 802.11p. En la capa física, IEEE 802.11p usa multiplexación por división ortogonal de frecuencia (OFDM, Orthogonal Frequency - Division Multiplexing), especifica un rango de.
(33) CAPÍTULO 1. DEFINICIÓN Y COMPONENTES DE LAS VANETs. 22. transmisión de hasta 1000 metros, define tasas de transmisión de 3, 4.5, 6, 9, 12, 18, 24 y 27 Mbit/s en canales de 10 MHz y tasas de transmisión de 6, 9, 12, 18, 24, 36, 48 y 54 Mbit/s en canales de 20 MHz. Tabla 1.1: Parámetros de contención para las categorías de acceso (ACs) Categoría. AC0. AC1. AC2. AC3. Tipo de tráfico. Background. Mejor esfuerzo. Video. Voz. CWmín. aCWmín. aCWmín. 𝑎𝐶𝑊𝑚í𝑛 + 1 −1 2. 𝑎𝐶𝑊𝑚í𝑛 + 1 −1 4. CWmáx. aCWmáx. aCWmáx. aCWmín. 𝑎𝐶𝑊𝑚í𝑛 + 1 −1 2. AIFSN. 9. 6. 3. 2. 1.7.. Conclusiones parciales. Las VANETs son un tipo de redes móviles diseñadas para mejorar la seguridad de los vehículos en la carretera, mejorar la conducción o el confort al volante. Sus características principales, como la alta movilidad y su cambio frecuente de topología, patrones de movimiento, altos requerimientos de las aplicaciones, entre otras, suponen los retos fundamentales en la comunicación y a su vez su correcto funcionamiento. El estándar IEEE 802.11p, define las características de la capa física y MAC necesarias para operar en un entorno vehicular. Mientras que el protocolo IEEE 1609.4 describe las operaciones multicanales como la conmutación sincrónica de canal y el enrutamiento, y los controles de la división entre el CCH y SCH de IEEE 802.11p para permitir la coexistencia de aplicaciones relacionadas con la seguridad..
(34) CAPÍTULO 2. HERRAMIENTAS Y ESCENARIOS DE SIMULACIÓN. 23. CAPÍTULO 2. Herramientas y escenarios de simulación. 2.1 Desafíos de simulación Las VANETs suponen un caso particularmente complejo de MANETs, caracterizadas por muy altas velocidades y limitado grado de libertad en los patrones de movimiento de los nodos. Estas particularidades normalmente hacen de los protocolos tradicionales de comunicación telemática una solución ineficiente o incluso en ocasiones inservible para las VANETs. Es evidente la fuerte interacción entre el protocolo de red y la movilidad de los vehículos. En la versión estándar de un sistema de comunicaciones móviles, el tráfico de datos se ve alterado por la movilidad, pero en el caso de las VANETs esta interrelación aún va más allá: la movilidad también se ve alterada por el tráfico de datos. Éste es el fin último de este tipo de redes, pues los datos intercambiados entre los nodos pueden (o deben) dar lugar a que su movimiento cambie (se altere su velocidad, el recorrido, el patrón de movimiento, etc.). El gran impacto que el desarrollo de las tecnologías VANET puede ocasionar en el mercado de la automoción, es fácilmente comprensible por el enorme esfuerzo que se está realizando actualmente en el desarrollo de protocolos de comunicaciones y modelos de movilidad específicos para las redes vehiculares. Pese a que es fundamental probar y evaluar los protocolos implementados en escenarios reales, existen dificultades logísticas obvias, problemas económicos y limitaciones tecnológicas que hacen de las simulaciones el medio más comúnmente elegido para validar los protocolos de comunicación que se desarrollan para las VANETs[34]..
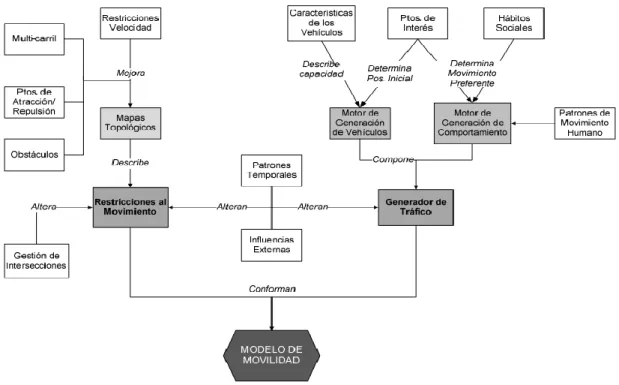
(35) CAPÍTULO 2. HERRAMIENTAS Y ESCENARIOS DE SIMULACIÓN. 24. Actualmente existen en el mercado numerosos simuladores de red que presentan variadas características. Una breve lista de los simuladores actuales más extendidos incluye ns-2, ns3, OMNeT++, OPNET, REAL, SSNFNet, QualNet, J-Sim y TOTEM. Los más ampliamente empleados son los cuatro primeros: ns-2, ns-3, OMNeT++ y OPNET, los cuales, además, representan la evolución reciente en el campo de los simuladores de red. 2.2 Modelos de movilidad Un aspecto crítico en el estudio mediante simulación es la necesidad de un modelo de movilidad que refleje el comportamiento real del tráfico de vehículos. De hecho, se requerirá de modelos de movilidad que sean dinámicamente reconfigurables, con el fin de reflejar los efectos de un protocolo de comunicación en particular sobre el tráfico viario; pues estos determinan el comportamiento del flujo vehicular e indican la ubicación de los nodos (vehículos con equipados de una OBU) en la topología; la posición de los nodos en cada instante del tiempo es determinante en el desempeño de las VANET (conectividad, throughput, etc.). En concreto, un modelo de movilidad que pretenda generar patrones de movimiento vehicular realistas, debe incluir los siguientes bloques fundamentales[37]:. Figura 2.1: Clasificación de los modelos de movilidad.
(36) CAPÍTULO 2. HERRAMIENTAS Y ESCENARIOS DE SIMULACIÓN. 25. Una característica importante de algunos modelos de movilidad es su flexibilidad y facilidad con que permiten ser adaptados a condiciones particulares de trabajo. En consecuencia, surgen modelos propios, especificados por autores para cumplir requerimientos puntuales. Por esta razón en la figura 2.2 se ha propuesto [39, 40] un mapa conceptual con las principales variables que componen un modelo de movilidad. De este mapa se realizan especializaciones dependiendo de los requerimientos particulares de cada proyecto.. Figura 2.2: Mapa conceptual para la generación de un modelo de movilidad. Al profundizar en las particularidades de las carreteras, se observa que pueden presentarse diversas situaciones que afectan la movilidad y, por ende, el modelo de movilidad de los vehículos. A continuación, se ejemplifican algunos obstáculos que sortean los vehículos y que están implícitos en la figura 2.2: . Huecos en la vía. . Motocicletas y bicicletas. . Transporte público. . Accidente de tráfico.
(37) CAPÍTULO 2. HERRAMIENTAS Y ESCENARIOS DE SIMULACIÓN. 26. 2.2.1 Modelos aleatorios Los modelos aleatorios (Random Models) describen el movimiento de los vehículos mediante patrones generados aleatoriamente y especifican situaciones en las cuales los nodos tienen la libertad de moverse en cualquier dirección y con distintas velocidades. Para el caso de las redes VANET, los modelos de movilidad aleatorios son poco utilizados debido a que los vehículos están restringidos a desplazarse a lo largo y ancho de las vías y no pueden tomar caminos aleatorios o desordenados. Entre los modelos de movilidad aleatorios se destacan [33]: • Random Waypoint Model (RWM) • Random Walk Model (RWalk) • Reference Point Group Mobility Model (RPGM) 2.2.2 Modelos de tráfico Los modelos de tráfico (Traffic Models) se basan exclusivamente en estudios teóricos de tráfico para tratar de cuantificar una topología de red. Estos modelos establecen el patrón de movimiento de los vehículos en las simulaciones con base en teorías de tráfico, lo que contribuye a lograr simulaciones detalladas del flujo vehicular pero, al igual que los modelos aleatorios, el no incluir características propias de redes vehiculares y sus nodos (como el estilo de conducción, la longitud de los vehículos, el espacio entre vehículos en intersecciones, etc.) hace que sean utilizados únicamente para estudios particulares [34]. 2.2.3 Modelos de flujo Con el fin de incrementar el nivel de realismo en los modelos de movilidad, los modelos de flujo (Flow Models) consideran la interacción entre los vehículos y su entorno. Existe una subclasificación de acuerdo a la granularidad del modelo [35]: . Microscópicos: describen el comportamiento y los parámetros de movilidad de cada uno de los vehículos y la interacción entre ellos, como la distancia intervehicular, la velocidad, la aceleración, desaceleración, tiempo de reacción ante un evento, entre otros. Los modelos microscópicos son los más apropiados para la simulación de redes vehiculares..
(38) CAPÍTULO 2. HERRAMIENTAS Y ESCENARIOS DE SIMULACIÓN. . 27. Macroscópicos: estos modelos describen a nivel general el comportamiento del flujo, la densidad y la velocidad de un “bloque” o conjunto de vehículos.. . Mesoscópicos: combinan las propiedades de los modelos microscópicos y macroscópicos.. 2.2.4 Modelos de comportamiento Los modelos de movilidad (Behavorial Models) generalmente se enfocan en describir las características de los vehículos, vías y demás, surgió una clasificación adicional para algunos modelos que se centran en describir el comportamiento de los conductores antes que otras variables. Es por esto que los modelos de comportamiento toman como variables más relevantes el estilo de conducción de las personas y sus posibles reacciones ante eventos, con el fin de evitar patrones de movimiento aleatorios. Los datos obtenidos mediante estos modelos se ajustan a simuladores computacionales con el fin de analizar sus posibles consecuencias en redes VANET [36]. 2.3 Descripción de las herramientas de simulación Una herramienta útil para analizar las características de cualquier red dentro de un entorno controlado es la simulación, la cual ayuda a examinar varios escenarios, protocolos y demás características de la red, con la ventaja de que estas simulaciones reflejan un entorno muy similar al real. Una vez analizadas las herramientas de simulación de VANETs, se escoge para el desarrollo del trabajo el simulador híbrido Veins que acopla bidireccionalmente el simulador de tráfico SUMO y el simulador de red OMNeT++. La elección se sustenta en las características únicas que presenta esta plataforma y que le brindan al usuario un entorno robusto y potente para la realización y depuración de simulaciones en entornos reales, además de que el funcionamiento de la red se observa gráficamente con un alto nivel de detalle. 2.3.1 Simulador de red: OMNet++ Banco de prueba de Red Modular Objetivo en C ++ (OMNeT++, Objective Modular Network Tested in C++)[38]: es un simulador de red de eventos discretos de código abierto, altamente modular, escalable y bien estructurado. Este proporciona el marco necesario para el desarrollo de ciertos módulos de simulación, pero estos modelos se.
(39) CAPÍTULO 2. HERRAMIENTAS Y ESCENARIOS DE SIMULACIÓN. 28. desarrollan independientemente de OMNeT++ y siguen sus propios ciclos de lanzamiento. Esto significa que varios marcos pueden ser modelados en la misma área de investigación. Se emplea principalmente para el modelado de redes alámbricas e inalámbricas, protocolos de comunicación, evaluación de aspectos de desempeño de sistemas de software de arquitecturas de hardware. Un modelo de simulación en OMNeT++ consta de las siguientes etapas: . Definición de la topología y estructura a simular, es decir, módulos e interconexiones, mediante el mencionado lenguaje NED.. . Definición de los módulos simples, que son los elementos activos del modelo, mediante C++.. . Compilación de los módulos y enlazado con la librería de simulación: Generación del modelo.. . Especificación de los parámetros concretos de la simulación.. Figura 2.3: Presentación del Simulador OMNeT++. 2.3.2 Simulador de tráfico: SUMO Simulación de Movilidad Urbana (SUMO, Simulation of Urban MObility)[39]: Consiste en una herramienta especialmente atractiva para su uso y estudio en el campo de la simulación vehicular ya que se trata de un software altamente portable, de tipo freeware y opensource,.
(40) CAPÍTULO 2. HERRAMIENTAS Y ESCENARIOS DE SIMULACIÓN. 29. para simulación de tráfico microscópico y multimodal. Consta tanto de una consola que permite introducir los comandos correspondientes para ejecutar las simulaciones, así como de una interfaz gráfica (GUI) que permite visualizar e interactuar con el output de la simulación de tráfico. Se encuentra en continuo desarrollo por parte del instituto de sistemas de transporte perteneciente al centro aeroespacial alemán. Este proyecto comenzó en el año 2000, en el 2001 aparece la primera versión ejecutable y continua hasta el día de hoy en desarrollo, al ser una herramienta utilizada en numerosos proyectos de alcance internacional. A través de la combinación de SUMO y mapas descargados del sitio OpenStreetMap, es posible simular tráfico vehicular en diferentes zonas del planeta. Sus características se detallan a continuación: . Movimiento de vehículos en tiempo discreto y espacio continúo.. . Soporta tipos diferentes de vehículos.. . Vías multicarril.. . Cambio de carril.. . Diferentes modos de prioridad en cruces y semáforos.. . Interfaz gráfica, como se observa en la figura 2.3.. . Soporta redes varias de varias decenas de miles de calles.. . Interoperabilidad con otras aplicaciones en tiempo real.. . Rutas microscópicas (cada vehículo tiene la suya propia).. . Alta velocidad de ejecución (alcanza 100.000 actualizaciones/segundo por vehículo en un procesador de 1GHz). . Alta portabilidad (paquetes para Linux y Windows).. . Alta interoperabilidad gracias al uso de datos XML.. SUMO está concebido para simular tráfico de una red viaria del tamaño de una ciudad, no obstante, también es capaz de modelar redes de tamaños mayores, tales como sistemas de autopistas. Puesto que la simulación es multimodal, lo que significa que no sólo se modelan los movimientos de los coches, sino también los sistemas de transporte público, el componente más básico de la simulación es un ser humano virtual. Este ser humano es descrito mediante una hora de salida y la ruta que va a tomar (que estará formada por subrutas, que describen una única modalidad de tráfico)..
(41) CAPÍTULO 2. HERRAMIENTAS Y ESCENARIOS DE SIMULACIÓN. 30. Como ya se ha dicho, SUMO simula el flujo de tráfico de forma microscópica. Esto significa que cada vehículo que se mueve por la red simulada es modelado individualmente y está caracterizado por una cierta posición y velocidad. Por cada intervalo temporal, que tiene duración de 1 segundo, se actualizan estos parámetros dependiendo del vehículo que esté situado delante y de la topología de la vía por la que se desplaza. La simulación de los vehículos se hace de forma discreta en el tiempo y continua en el espacio, pues el modelo de movilidad que utiliza SUMO es continuo.. Figura 2.4: Simulación vista desde SUMO 2.3.3 Simuladores dedicados: MOVES Generador de modelos de movilidad para redes vehiculares (MOVE, MObility model generator for VEhicular networks)[40]:es una herramienta de simulación dedicada a las comunicaciones vehiculares, que utiliza un enfoque paralelo y distribuido. Desarrollada en lenguaje de programación Java, por la School of Computer Science and Engineering, de la Universidad New South Wales de Australia. Este simulador está construido en el tope de SUMO y genera velozmente trazas de movilidad para simuladores de red. Estos patrones de movilidad pueden ser generados automáticamente o manualmente a través de un Editor de Movimiento del Vehículo. El modelo de movilidad en MoVES es muy similar al propuesto en STRAW, pero con las limitaciones de un entorno distribuido. MoVES está realmente.
Figure




+7




Documento similar
You may wish to take a note of your Organisation ID, which, in addition to the organisation name, can be used to search for an organisation you will need to affiliate with when you
Where possible, the EU IG and more specifically the data fields and associated business rules present in Chapter 2 –Data elements for the electronic submission of information
The 'On-boarding of users to Substance, Product, Organisation and Referentials (SPOR) data services' document must be considered the reference guidance, as this document includes the
In medicinal products containing more than one manufactured item (e.g., contraceptive having different strengths and fixed dose combination as part of the same medicinal
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
Package Item (Container) Type : Vial (100000073563) Quantity Operator: equal to (100000000049) Package Item (Container) Quantity : 1 Material : Glass type I (200000003204)
