Caracterización de fallos en vehículo autónomo aéreo Quadcopter X4 GARP
69
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Automática y Sistemas Computacionales. TRABAJO DE DIPLOMA “Caracterización de fallos en Vehículo Autónomo Aéreo Quadcopter X4 GARP.” Autor: Luis Alberto Pérez Aréchaga email: [email protected]. Tutores: Ing. Ailet Abreu López Dpto. de Automática, Facultad de Ing. Eléctrica, UCLV email: [email protected]. Dr.C. Eduardo Izaguirre Prof. Titular Dpto. de Automática, Facultad de Ing. Eléctrica, UCLV email: [email protected]. Dr.C. José Rafael Abreu García Prof. Titular Dpto. de Automática, Facultad de Ing. Eléctrica, UCLV email: [email protected] Santa Clara 2017 "Año 59 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería en Automática, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. PENSAMIENTO. Si quieres triunfar en la vida, haz de la perseverancia tu amigo del alma, de la experiencia tu sabio consejero, de la advertencia tu hermano mayor y de la esperanza tu genio guardián. Joseph Addison..
(5) ii. DEDICATORIA. A mis padres y a mi hermana, por ayudarme, más con acciones que con palabras, a forjar mi futuro. A Elisa, por ser el mejor de los regalos. A todos mis familiares y fieles amigos, por apoyarme en todo momento. A todos los profesores, que con sabiduría y experiencia han contribuido a mi formación como profesional..
(6) iii. AGRADECIMIENTOS A mis padres, por su entrega total a mi realización como profesional, por ser mis guías en la vida y por darme siempre lo mejor de ellos. A mi hermana y su esposo, por brindarme cariño y aliento, y por estar ahí cuando los he necesitado. A mis abuelos, que con sus sabios consejos me indicaron el camino correcto. A mi tía Isaida y a mis primos, casi hermanos, Arleen y Alahin, por su presencia alegre a mi lado y por su ayuda desinteresada e incondicional. A todos mis tíos y primos y al resto de mi familia, por la confianza y el apoyo que siempre me han hecho sentir. A mis tutores, Ailet, Eduardo y José Rafael por poner todos sus conocimientos y experiencia en función de esta tesis con sus acertadas y valiosas recomendaciones, por ayudarme a enfrentar cada reto y, sobre todo, por creer mí. A los profesores Delvis y Luis Hernández por su ayuda y orientación en cada momento. A todos mis profesores, que con dedicación y empeño contribuyeron a mi formación profesional. A mis amigos, Rolando, Addiel, Julio, Leosbel , Luis Ernesto y Darian por el apoyo que me dieron y por tener el inmenso privilegio de contar con su amistad. A todos los que de una u otra forma colaboraron directamente para llevar esta investigación a feliz término. Muchas Gracias.
(7) iv. RESUMEN. El aumento en el número de vehículos aéreos no tripulados (UAV) desde la década pasada ha sido considerable. Estos pueden ser controlados por un operador en tierra o de forma autónoma por un piloto automático, como es el caso del quadcopter X4 GARP. Al igual que en otros UAV, los fallos están presentes en la operación del X4. La ocurrencia de estos puede provocar inestabilidad o incluso la pérdida del vehículo. El conocimiento de los fallos que pueden ocurrir durante el vuelo es de vital importancia, por tanto en esta investigación, se realiza una caracterización de los fallos que pueden presentarse en el quadcopter X4 GARP con vistas a disminuir la ocurrencia de posibles fallos. Además, se efectúa un análisis de los registros de datos de vuelo almacenados en el piloto automático del vehículo a partir del procesamiento de estos datos de vuelo en función de determinar fallos que pueden presentarse durante la operación del quadcopter X4 GARP..
(8) v TABLA DE CONTENIDOS. PENSAMIENTO .....................................................................................................................i DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii RESUMEN ............................................................................................................................iv INTRODUCCIÓN .................................................................................................................. 1 CAPÍTULO 1.. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS. AUTÓNOMOS AÉREOS Y SUS FALLOS .......................................................................... 6 1.1. Introducción ............................................................................................................. 6. 1.2. Definiciones y tipos de UAV ................................................................................... 6. 1.3. Operación ................................................................................................................. 7. 1.4. Clasificación de UAV .............................................................................................. 8. 1.4.1. UAV de ala fija ..................................................................................................... 8. 1.4.2. UAV de ala rotatoria ............................................................................................ 9. 1.4.2.1. Clasificación de multirrotores ......................................................................... 10. 1.5. Fallos y averías en UAV ........................................................................................ 12. 1.6. Clasificación de fallos y averías en UAV .............................................................. 13. 1.6.1. Fallos de sensores ............................................................................................... 14. 1.6.2. Fallos de actuadores ........................................................................................... 15. 1.6.2.1. Fallos de actuadores en UAV de ala fija......................................................... 15. 1.6.2.2. Fallos de actuadores en UAV de ala rotatoria ................................................ 17. 1.6.3. Fallo de comunicación ........................................................................................ 17. 1.6.4. Fallo de batería ................................................................................................... 18.
(9) vi 1.6.5. Averías estructurales .......................................................................................... 18. 1.6.6. Averías electrónicas............................................................................................ 18. 1.6.7. Factor Humano ................................................................................................... 19. 1.6.8. Efectos ambientales ............................................................................................ 19. 1.7. Consideraciones parciales ...................................................................................... 20. CAPÍTULO 2.. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES. FALLOS. 21. 2.1. Introducción ........................................................................................................... 21. 2.2. Descripción del funcionamiento del Quadcopter X4 GARP ................................. 21. 2.3. Elementos del Quadcopter X4 GARP .................................................................... 22. 2.3.1. Estructura ............................................................................................................ 22. 2.3.2. Motores ............................................................................................................... 23. 2.3.3. Hélices ................................................................................................................ 24. 2.3.4. Controlador electrónico de velocidad ................................................................. 25. 2.3.5. Batería................................................................................................................. 25. 2.3.6. GPS ..................................................................................................................... 26. 2.3.7. Controlador de vuelo .......................................................................................... 27. 2.3.8. Sistemas de comunicación .................................................................................. 29. 2.4. Modos de vuelo ...................................................................................................... 30. 2.4.1. Modo Automático (Auto) ................................................................................... 30. 2.4.2. Modo Loiter ........................................................................................................ 31. 2.4.3. Modo Estable (Stabilize) .................................................................................... 31. 2.4.4. Modo RTL (Return To Launch) ......................................................................... 31. 2.4.5. Modo Aterrizaje (Land) ...................................................................................... 32.
(10) vii 2.5. Principales fallos que se pueden presentar en la operación del quadcopter X4. GARP ................................................................................................................................ 32 2.6. Software Mission Planner ...................................................................................... 35. 2.7. Registros de vuelo .................................................................................................. 36. 2.8. Consideraciones parciales ...................................................................................... 37. CAPÍTULO 3.. ANÁLISIS DE REGISTROS DE DATOS DE VUELO ........................ 39. 3.1. Introducción ........................................................................................................... 39. 3.2. Determinación y análisis de fallos utilizando los registros de datos (logs) ........... 39. 3.2.1. Fallos mecánicos ............................................................................................. 39. 3.2.2. Fallo del acelerómetro .................................................................................... 42. 3.2.3. Fallo de la brújula ........................................................................................... 43. 3.2.4. Fallo del GPS .................................................................................................. 44. 3.2.5. Fallo de alimentación del Pixhawk ................................................................. 45. 3.3. Valoración económica y medioambiental .............................................................. 47. 3.4. Consideraciones parciales ...................................................................................... 48. CONCLUSIONES Y RECOMENDACIONES ................................................................... 49 Conclusiones ..................................................................................................................... 49 Recomendaciones ............................................................................................................. 50 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 51 ANEXOS .......................................................................................................................... 54.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN. Una tendencia actual es la investigación y desarrollo de vehículos aéreos no tripulados (Unmanned Aerial Vehicles, UAV), pues estos presentan grandes ventajas en disímiles tareas como el acceso a lugares remotos, reconocimiento, supervisión y vigilancia (MartínezJiménez et al., 2012). La naturaleza no tripulada del concepto presupone que el hombre es el factor limitante en el éxito de ciertas misiones. La ausencia del piloto en el vehículo minimiza la necesidad humana y maximiza la tasa de éxito para las misiones. Sin embargo, la tasa de accidentes de la aviación general es de alrededor de 1 por cada 100000 horas de vuelo, mientras que los sistemas militares de UAV han experimentado tasas de fallos de magnitud superior, casi 1 por cada 1000 horas de vuelo (Caswell and Dodd, 2014). Esta percepción es crítica en un momento en que el uso de los UAV está a punto de experimentar un crecimiento sin precedentes. Algunos UAV ya están siendo utilizados para patrullas fronterizas, lucha contra incendios, ayuda en casos de desastre, misiones de búsqueda y rescate, capacitación e investigación y desarrollo. Además, existe un mercado muy distinto para UAV que serán utilizados para la recreación, sin mencionar el reciente entusiasmo del sector comercial sobre la posibilidad de utilizarlos para la logística y la entrega de paquetes. Estos sistemas, se prevé que no sean probados de forma rigurosa o tan bien fabricados como los sistemas militares por lo que presentan un peligro potencial y un riesgo de seguridad si fallan (Ballenger, 2013). Según una investigación de Washington Post, más de 400 drones militares estadounidenses se han estrellado en todo el mundo desde 2001, siendo esto un récord de calamidades que expone el peligro potencial de lanzar al cielo estos drones (Whitlock, 2014). Aunque no se ha reportado hasta el momento la muerte de seres humanos debido a un accidente comercial de UAV desde que estos fueron aprobados para volar sobre los Estados Unidos en 2013,.
(12) INTRODUCCIÓN. 2. UAV han golpeado hogares, granjas, autopistas y canales navegables (Caswell and Dodd, 2014). La tasa de fallos de los UAV comerciales se espera que aumente más allá de las experiencias militares, dado que los UAV comerciales se desarrollan sin sistemas redundantes, como sensores y enlaces de comunicación inalámbrica, por citar algunos ejemplos. A medida que los UAV se integren más en el espacio aéreo, la necesidad de mejorar la fiabilidad resultará aún más evidente. Estimular el uso de UAV puede aumentar el riesgo de accidentes; por consiguiente, el estudio y caracterización de fallos en Vehículos Autónomos Aéreos, así como el análisis de fallos utilizando registros de datos constituye un importante tema de investigación tanto para los diseñadores como para los usuarios. Cuando los UAV comerciales fallan, el costo de la investigación forense es mayor que el costo de reemplazar el vehículo, por lo que la mayoría de los usuarios reemplazarán a su unidad en lugar de pagar para analizar la avería que ocurrió (Caswell and Dodd, 2014). Debido a esto se puede correr el riesgo de no conocer la causa de la avería y no poder realizar cualquier mejora correctiva, ya sea en el diseño, materiales o fabricación. La tecnología en las aeronaves no tripuladas avanza a un ritmo muy acelerado, pero todo parece indicar que el control sobre estas máquinas no es tan estricto y perfecto como muchos quieren hacer ver. Los incidentes de pérdida de control van en aumento y aunque muchos de ellos no se dan a conocer, la situación en algunos casos se ha tornado preocupante y tal como sucedió en otras ocasiones, será el ser humano representado en este caso por los pilotos, quienes le impondrán un límite a la misma tecnología que los quiso reemplazar (Ma, 2011). En resumen, la terminación de la misión es el problema más crítico y desafiante que se plantea durante la operación de un UAV porque podría estar llevando información vital que necesita asegurarse y reunirse. En operaciones en tiempo real y en escenarios de misión crítica es fundamental detectar, acceder, aislar y corregir los fallos y las averías del sistema que pueden ocurrir durante el vuelo (Johry and Kapoor, 2016). Por lo tanto, es necesario que el sistema siga funcionando a pesar de algún fallo o daños en los componentes del UAV durante el vuelo, con o sin degradación del rendimiento, para garantizar la continuidad de la misión y la salvaguardia del UAV. Por lo planteado con anterioridad es que instituciones, centros de investigación y varias universidades en todo el mundo han realizado proyectos e investigaciones sobre los fallos.
(13) INTRODUCCIÓN. 3. que se pueden presentar en UAV (Ma, 2011), (Ducard, 2007), (Johry and Kapoor, 2016), (Dybsjord, 2013), (Camille Alain Rabbath, 2010). En otras investigaciones (Oncu and Yildiz, 2014),(Arrabito et al., 2010),(Asim et al., 2005), se determinan los factores causales probables en los accidentes de UAV basados en el análisis del factor humano. En las consultas efectuadas en la literatura especializada no se han encontrado referencias que trabajen en este importante tema en Cuba, aun cuando ya se han venido dando los primeros pasos en el uso de los vehículos aéreos donde se destacan las aplicaciones llevadas a cabo por el Grupo de Automatización, Robótica y Percepción (GARP) de la Universidad Central Marta Abreu de Las Villas (UCLV) en el campo de la fotometría área y la Empresa GEOCUBA en la creación de mapas (Fernandez et al., 2014),(Raymari Roche Ricaño, 2016). El GARP posee una serie de UAV que se utilizan en la realización de misiones. Entre estos se encuentra el quadcopter X4 GARP. Este ha presentado fallos en su operación y no se dispone de información de los principales fallos que se pueden presentar en el mismo, con vistas a evitar posibles daños y aumentar su fiabilidad, incidiendo positivamente en una mayor vida útil y garantía en el cumplimiento de las misiones de forma satisfactoria. En este sentido se puede plantear que el objeto de investigación de la presente tesis está centrado en los fallos en Vehículos Autónomos Aéreos, estableciéndose el campo de aplicación como la evaluación de los fallos en vehículo autónomo aéreo quadcopter X4 GARP. Por tanto, se plantea el siguiente problema científico: No se cuenta con una caracterización de los fallos que se pueden manifestar en el quadcopter X4 GARP empleado en las misiones que ejecuta el GARP de la UCLV, que permita disminuir la ocurrencia de posibles fallos. A partir de esto se plantea como hipótesis de esta investigación. Hipótesis: Es posible efectuar una caracterización de los fallos que se pueden presentar en el quadcopter X4 GARP, que permita disminuir la ocurrencia de posibles fallos. A partir del planteamiento de la anterior hipótesis de investigación se definen los objetivos, general y específicos, que se plantean de la siguiente manera:.
(14) INTRODUCCIÓN. 4. Objetivo General: . Caracterizar los fallos que se pueden presentar en el quadcopter X4 GARP, con vistas a disminuir la ocurrencia de posibles fallos.. Objetivos Específicos: 1. Analizar en la literatura especializada los fundamentos teóricos conceptuales relacionados con los UAV y los fallos que se pueden presentar. 2. Caracterizar el quadcopter X4 GARP y sus principales modos de operación. 3. Analizar los principales fallos que pueden aparecer durante el vuelo en el quadcopter X4 GARP. 4. Analizar los registros de datos de vuelo almacenados en el piloto automático del vehículo quadcopter X4 GARP en función de determinar y analizar fallos que pueden presentarse durante la operación del mismo. Tareas de investigación: 1. Análisis de la literatura especializada dentro el objeto de investigación, haciendo hincapié en los conceptos y fundamentos relacionados con los vehículos autónomos aéreos. 2. Caracterización del UAV Quadcopter X4 GARP, mediante el estudio de su funcionamiento y descripción de los componentes. 3. Identificación de los principales fallos que se pudieran presentar en el UAV Quadcopter X4 GARP, a partir de las experiencias acumuladas de vuelos reales efectuados. 4. Procesamiento de la información contenida en los registros de datos de vuelo almacenados en el piloto automático del vehículo. 5. Redacción del Informe de Tesis. El principal aporte de este trabajo radica, en que se realiza una caracterización de los fallos que pueden presentarse en el quadcopter X4 GARP con vistas a disminuir la ocurrencia de posibles fallos. Por otra parte, se efectúa un análisis de los registros de datos de vuelo almacenados en el piloto automático del vehículo a partir del procesamiento de estos datos.
(15) INTRODUCCIÓN. 5. de vuelo en función de determinar fallos que pueden presentarse durante la operación del quadcopter X4 GARP. Organización del informe: En la Introducción queda definida la importancia y necesidad del tema que se aborda. La investigación incluye tres capítulos, además de las conclusiones, recomendaciones y referencias bibliográficas. Los temas que se abordan en cada capítulo se encuentran estructurados de la forma siguiente: Capítulo I: Este capítulo comienza con un análisis de los fundamentos relacionados con la operación y los tipos de vehículos autónomos aéreos. Se efectúa una clasificación de los vehículos aéreos no tripulados. Se definen y analizan los términos fallos y averías con relación al funcionamiento de los UAV. Por último, se realiza una caracterización de los principales fallos que pueden presentarse en los vehículos autónomos aéreos que constituye el objeto de estudio de esta investigación. Capítulo II: En este capítulo se realiza un estudio del UAV quadcopter X4 GARP. Se muestra un análisis de su funcionamiento, así como descripción de sus componentes. Se explican los modos de vuelo básicos que posee y la función de cada uno. Se presentan los principales fallos que pueden aparecer en el quadcopter durante el vuelo. Para finalizar se realiza una breve descripción del software Mission Planner y la función que juega este en la determinación y análisis de fallos presentados durante el vuelo. Capítulo III: En este capítulo se realiza un análisis de los registros de datos de vuelo almacenados en el controlador de vuelo del vehículo con el objetivo de mostrar cómo determinar y analizar los fallos que pueden presentarse durante la operación del quadcopter X4 GARP, haciendo uso de la herramienta de software matemático Matlab..
(16) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 6. CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 1.1. Introducción. En este capítulo se abordan los fundamentos teóricos conceptuales relacionados con la operación y los tipos de vehículos autónomos aéreos. Se efectúa una clasificación de los vehículos aéreos no tripulados. Se definen y analizan los términos fallos y averías con relación al funcionamiento de estos drones. Además, se realiza una caracterización de los principales fallos y averías que pueden presentarse en los vehículos autónomos aéreos que constituye el objeto de estudio de esta investigación. 1.2. Definiciones y tipos de UAV. Según la OACI (Organización de Aviación Civil Internacional) el término genérico que se utiliza para denominar a estos aparatos tecnológicos es Vehículo Aéreo No Tripulado (VANT) en español o Unmanned Aerial Vehicles (UAV) en inglés (Internacional, 2011). El concepto operacional de gestión del tránsito aéreo mundial establece que “un vehículo aéreo no tripulado es una aeronave que vuela sin un piloto al mando a bordo y que se controla a distancia desde otro lugar (tierra, otra aeronave, espacio) o que ha sido programada y es plenamente autónoma” (Internacional, 2011). De acuerdo a la Circular 328, las aeronaves no tripuladas ante todo son aeronaves y por lo tanto están bajo las mismas regulaciones de las tripuladas. La misma circular establece un criterio relacionado a considerar a todo el sistema, es decir además de la aeronave, incluir la estación de control en tierra y el enlace de.
(17) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 7. comunicaciones entre ésta y la aeronave. Con este criterio se plantean los términos UAS (sistemas de aeronaves no tripuladas) y RPAS (sistemas de aeronaves pilotadas a distancia). Para integrar los UAS en el espacio aéreo no segregado y en aeródromos no segregados, deberá haber un piloto responsable de la operación del UAS. Los pilotos pueden utilizar equipo como el piloto automático para ayudar en la realización de sus funciones (Internacional, 2011). Para reflejar mejor la condición de estas aeronaves que son realmente pilotadas, se introduce en el vocabulario la expresión “Aeronave Pilotada a Distancia” (RPA). Esta es pilotada por un piloto remoto, titular de licencia, emplazado en una estación de piloto remoto ubicada fuera de la aeronave quien monitoriza la aeronave en todo momento y puede responder a las instrucciones expedidas por el Controlador de Tráfico Aéreo (ATC) (Internacional, 2011). Una RPA puede poseer varios tipos de tecnología de piloto automático, pero en todo momento, el piloto remoto puede intervenir en la gestión del vuelo. Cabe destacar entonces la distinción entre RAPS y aeronaves completamente autónomas, en las que no existe control efectivo del piloto remoto sobre la aeronave, en todo o parte del vuelo. Queda claro que, así como todos los RAPS son UAS, no todos los UAS son RAPS. En todo caso, las aeronaves autónomas plantean problemas importantes para garantizar la seguridad y sobre todo para asignar la responsabilidad en caso de accidentes por lo que su desarrollo no está previsto a corto plazo, al menos en el mundo civil. 1.3. Operación. El control del vehículo aéreo no tripulado se hace de manera remota o mediante sistemas de vuelo autónomo. En particular, de acuerdo con (de la Hoz, 2015), en un UAS se pueden distinguir 3 elementos principales: el segmento de tierra, el segmento aéreo y el enlace de datos. En el segmento de tierra, es de especial importancia la estación de control en tierra, desde la cual los operadores pueden tomar el control de uno o más vehículos aéreos. Está estación de control suele estar formada por una estación para planificar la misión y otra estación para la exploración o análisis de la información de vuelo. El equipamiento de lanzamiento y.
(18) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 8. recuperación, en cambio, es diseñado para UAV de pequeñas dimensiones que no son capaces de realizar un despegue o aterrizaje convencional. Finalmente, el equipo de logística asegura la operatividad del UAV como podrían ser por ejemplo las unidades de carga. El segmento aéreo, en cambio, está formado por el vehículo aéreo no tripulado y su respectivo cargamento, como pueden ser cámaras para capturar imágenes y filmar videos. El subsistema encargado de interconectar ambos segmentos sería el enlace de datos, dividido en el enlace de datos terrestre y aéreo. La mayoría de los vehículos presentan dos enlaces de datos para cada lado de la comunicación; uno para el control y envío de comandos y otro para la recepción de la información de vuelo. Sin embargo, también es posible encontrar enlaces de comunicación para elementos externos como sería la comunicación satelital mediante GPS o la comunicación con un mando radio control. Independientemente del tipo de enlace de datos utilizado se distinguen los dos canales siguientes: . Uplink: La información es enviada desde el segmento aéreo al segmento terrestre.. . Downlink: La información es enviada desde el segmento terrestre al segmento aéreo.. 1.4. Clasificación de UAV. En la actualidad no hay un estándar universal aceptado en cuanto a clasificación de UAV, pudiendo encontrar multitud de categorías de vehículos aéreos no tripulados siguiendo diferentes parámetros y criterios. Una clasificación de los UAV los divide en dos grandes grupos: . Vehículos de ala fija.. . Vehículos de ala rotatoria.. 1.4.1 UAV de ala fija Los UAV de ala fija (ver figura 1.1), son los considerados como aviones, y según (GarcíaCervigón and José, 2015) sus principales características son: . Son más eficientes que los multirrotores, ya que, a igualdad de tamaño, tienen mayor autonomía..
(19) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. . 9. Vuelan a mayor velocidad, por lo que al tener además mayor autonomía recubren más superficie, siendo más útiles en tareas de cartografía o teledetección.. . Tienen menor huella sonora, siendo más indicados para operaciones de vigilancia.. . Tienen mayor rango meteorológico, en términos de temperatura, viento y lluvia.. Figura 1.1: UAV de ala fija. 1.4.2 UAV de ala rotatoria Los UAV de ala rotatoria (ver figura 1.2) son aquellos en los cuales, las fuerzas de sustentación se logran mediante el giro de las hélices en el aire, siendo estos también conocidos como multirrotores o helicópteros. En (García-Cervigón and José, 2015) se presentan las características más importantes de estos: . Despegue y aterrizaje vertical, reduciendo las necesidades de espacio para las maniobras de aterrizaje y despegue.. . Posibilidad de volar a puntos fijos.. . Vuelo estacionario, muy útil para aplicaciones de inspección.. . Mayor maniobrabilidad y precisión de vuelo, ya que los sistemas de ala fija siguen trayectorias curvilíneas, con radios de giro relativamente grandes y velocidades de ascenso y descenso bastantes estrictas, sin embargo, los multirrotores pueden volar siguiendo cualquier trayectoria en las tres dimensiones.. . El diseño de los multirrotores permite embarcar cargas de pago más voluminosas..
(20) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 10. Figura 1.2: UAV de ala rotatoria. 1.4.2.1 Clasificación de multirrotores Dentro de este grupo de multirrotores existen 4 tipos principales: Tricóptero: Como su nombre indica, esta construcción tiene tres hélices y tres motores. Los tricópteros (ver figura 1.3 (a)) son a menudo más ágiles que los cuadricópteros normales. El principal beneficio de la construcción de un tricóptero es que es más barato al solo requerir 3 motores, lo que a su vez constituye una desventaja porque al tener menos motores, estos tienen que trabajar más duro y por lo general se obtiene menos tiempo de vuelo.. (a). (b) Figura 1.3: Tricóptero (a) y Cuadricóptero (b)..
(21) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 11. Cuadricóptero: Este es el estándar multirrotor. Consistiendo de 4 hélices y 4 motores, éstos se utilizan para una variedad amplia de cosas. Pueden tener una carga mucho mayor, para llevar cosas como cámaras y baterías adicionales. En general, en comparación con los tricópteros, los cuadricópteros (ver figura 1.3 (b)) son más estables y pueden ser de menor tamaño, manteniendo la misma estabilidad. Hexacóptero: Consta de 6 motores y 6 hélices y son similares a los cuadricópteros. Aunque mucho más costosos de construir debido a que necesitan más motores y cables, los hexacópteros (ver figura 1.4 (a)) son un poco más seguros que los cuadricópteros. Si falla algún motor, presenta inestabilidad en el vuelo, pero todavía puede aterrizar. Octocóptero: Posee 8 motores y 8 hélices y son los más caros para construir. Debido al hecho de que tiene muchos motores, un octocóptero (ver figura 1.4 (b)) es capaz de ir muy rápido. La razón principal por la que éstos se utilizan es porque si un motor falla puede continuar el vuelo y no caer al suelo.. (a). (b). Figura 1.4: Hexacóptero (a) y Octocóptero (b). Los fallos pueden presentarse en cualquier tipo de mutirrotor. Mientras más motores tenga el vehículo, más posibilidades tiene de sufrir fallos. Sin embargo, los vehículos que tienen más motores poseen la capacidad de proporcionar redundancia para mantener el control en caso de que falle algún motor. Desde hace varios años, cada vez se informan más accidentes de.
(22) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 12. mutirrotores por autoridades de transporte (Sadeghzadeh, 2015). La figura 1.5 muestra un octocóptero tras sufrir un accidente.. Figura 1.5: Accidente de un octocóptero. A pesar de la presencia de posibles fallos, los quadcopters controlados por radio son cada vez más populares. A diferencia de los helicópteros, son mucho más estables, y pueden levantar una carga más grande. Ejemplo de esto lo constituye el Quadcopter X4 GARP que es el campo de aplicación de esta tesis. 1.5. Fallos y averías en UAV. Los términos fallos y averías son usados para describir diferentes grados de degradación de sistemas. A continuación, se muestran las diferencias entre estos dos términos. Fallo: Un fallo es una desviación no permitida de al menos una propiedad característica del sistema de la condición aceptable, usual y estándar (Johry and Kapoor, 2016). Basado en la definición, un fallo se refiere a un comportamiento inusual del sistema, que puede no afectar el funcionamiento total del sistema, pero puede conducir eventualmente a una avería. Puede ser menor que el valor detectable o puede estar oculto y por lo tanto ser difícil de detectar y corregir. Por ejemplo, si la temperatura del motor cruza un determinado valor, hay un fallo en el sistema. Aunque esta temperatura excesiva no impida que el motor trabaje apropiadamente durante un tiempo, puede dañar componentes del motor y provocar.
(23) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 13. una avería. Para los sensores, la desviación de los datos de un valor aceptable se considera un fallo. Ruido excesivo, o valores erróneos también se clasifican como fallos de sensor. Avería: Una avería es una interrupción permanente de la capacidad de un sistema para realizar una función requerida bajo condiciones de funcionamiento especificadas (Johry and Kapoor, 2016). Emergiendo de uno o más fallos, la avería es un incidente que elimina el funcionamiento del sistema en el que ha ocurrido. Claramente, una avería es una condición que es más severa que un fallo. Cuando se produce un fallo en un actuador, este sigue siendo utilizable, pero puede tener una respuesta más lenta o volverse menos eficaz. Sin embargo, cuando ocurre una avería, se necesita un actuador diferente para poder producir el efecto deseado. En relación con el control general, la avería puede ser interpretada como un fallo (Dybsjord, 2013). En el caso de un UAV de ala fija una avería se puede producir en uno de los alerones dejando esta superficie de control inutilizable, y a pesar de esto, mediante el uso del resto de las superficies de control de manera diferente la aeronave es todavía controlable. Es interesante mencionar que los fallos y averías también pueden clasificarse en términos de tiempo. Los fallos o averías abruptas muestran cambios repentinos e inesperados y casi siempre son notados fácilmente por el piloto. Un ejemplo de una avería abrupta es un actuador atascado. Los fallos incipientes, por ejemplo, una desviación lenta en un sensor, son más sutiles y el efecto no es tan obvio. Sin embargo, los fallos incipientes si se dejan sin vigilancia durante un largo período de tiempo podrían degradar el rendimiento requerido del sistema y podrían conducir a averías abruptas y catastróficas. Los fallos incipientes pueden ser causados por el desgaste operacional y a pesar de tener un efecto insignificante pueden llegar a ser gradualmente peores (Ducard, 2007). 1.6. Clasificación de fallos y averías en UAV. Los fallos y averías en los componentes del UAV incluyen aquellos que afectan al ordenador de vuelo, actuadores, sensores o cualquier cosa que suponga una amenaza para la misión o el vehículo. A continuación, se muestran los fallos y averías que causan la pérdida de la aeronave o una misión comprometida..
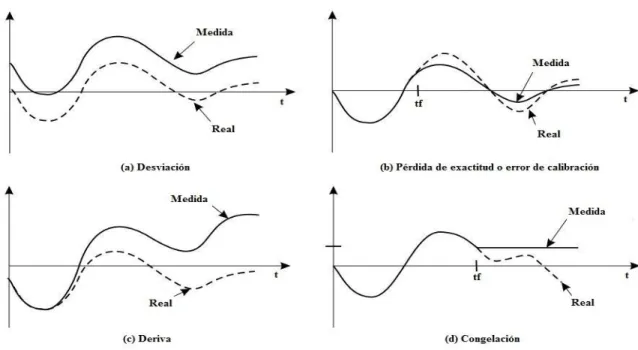
(24) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 14. 1.6.1 Fallos de sensores Un sensor es un dispositivo que recibe y mide las señales de estados internos de un sistema, y luego las convierte en las correspondientes señales de salida que pueden ser utilizadas por el mundo externo (Ma, 2011). Los fallos de los sensores pueden ser peligrosos y relativamente fáciles de detectar o críticos y difíciles de detectar. Estos fallos degradan el rendimiento del UAV. Un fallo en un sensor altera las mediciones requeridas por los controladores y, dependiendo de la gravedad del fallo, puede afectar el comportamiento del sistema en lazo cerrado (Camille Alain Rabbath, 2010). En (Dybsjord, 2013) y (Ducard, 2007) se enumeran algunos fallos comunes de sensores que han de tenerse en cuenta. Estos son: a) Desviación. (bias) b) Pérdida de exactitud o error de calibración. (loss of accuracy or calibration error) c) Deriva. (drift) d) Congelación. (Frozen). En la figura 1.6 se muestran los distintos casos. El caso (a) muestra una desviación constante entre las señales reales y medidas. La pérdida de exactitud (caso (b)) se produce cuando las mediciones no reflejan los verdaderos valores de las variables físicas. La deriva del sensor (caso (c)) es una condición por la cual los errores de medición aumentan con el tiempo. La congelación de las señales del sensor (caso (d)) indica que el sensor proporciona un valor constante en lugar del valor real. Por último, el error de calibración (caso (b)) es una representación equivocada del significado físico verdadero de los estados de las señales eléctricas o electrónicas que salen del mismo sensor..
(25) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 15. Figura 1.6: Fallos de sensor (caso (a), (b) y (c)) y avería de sensor (caso (d)) que se producen después de tf. 1.6.2 Fallos de actuadores Un actuador es un dispositivo mecánico que convierte la energía externa en el movimiento necesario (Ma, 2011). Este es un componente esencial en cualquier sistema de control y ha sido muy utilizado en aplicaciones industriales y de fabricación. Los fallos en los actuadores son ampliamente investigados en la industria aeroespacial y sus consecuencias pueden ser muy peligrosas, especialmente para la aeronave. Algunos fallos en los actuadores causan baja eficiencia, consumo elevado de los actuadores y pérdida parcial o total del control (Ma, 2011). 1.6.2.1 Fallos de actuadores en UAV de ala fija En un UAV de ala fija, los actuadores se utilizan para desviar superficies de control tales como alerón, elevador y timón. En caso de fallar uno o más actuadores, el rendimiento de las aeronaves se reduce y aumenta la inestabilidad, pudiendo llegar incluso a la pérdida del vehículo. De acuerdo con (Dybsjord, 2013) y (Ducard, 2007) los fallos en los actuadores de un UAV de ala fija se dividen en cuatro categorías:.
(26) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 16. a) Libre movimiento. (float) b) Bloqueo. (lock) c) Máxima deflexión. (hardover) d) Pérdida de eficacia. (loss of effectiveness) En la figura 1.7 se muestran los distintos casos. El caso (a) se produce cuando el actuador pierde la presión hidráulica o neumática total, dando como resultado una superficie de control de libre movimiento que no contribuye a elevarse. El bloqueo del actuador (caso (b)) es una avería causada por un atasco mecánico que causa que el actuador quede bloqueado en el lugar. El caso (c) ocurre cuando el actuador se mueve a la máxima deflexión debido a fallos eléctricos o de software. Por último, la pérdida de eficacia (caso (d)) se produce cuando la eficiencia de uno o múltiples actuadores se reduce debido a una pérdida parcial de presión hidráulica o neumática.. Figura 1.7: Averías de actuador (caso (a), (b) y (c)) y fallo de actuador (caso (d)) que se producen después de tf..
(27) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 17. 1.6.2.2 Fallos de actuadores en UAV de ala rotatoria En el caso de los UAV de ala rotatoria los actuadores son los motores que permiten el movimiento de las hélices para sustentar el vehículo en el aire. En (Bouabdallah et al., 2011) se definen dos aspectos importantes que han de tenerse en cuenta en los multirrotores: a) Desgaste operacional del motor. b) Avería total de un grupo de propulsión. El caso (a) puede conducir a una generación de empuje insuficiente y traer consigo inestabilidad en el vehículo o la pérdida del control. Si se produce una avería en un grupo de propulsión como indica el caso (b) será mucho peor, porque si la aeronave no posee la capacidad de proporcionar redundancia no podrá mantenerse en vuelo y caerá al suelo. Las averías en los motores de estos vehículos han sido una de las causas principales de accidentes. 1.6.3 Fallo de comunicación Mientras que la tecnología de la comunicación avanza hay factores que trabajan contra el sistema de comunicación resultando en la pérdida de señal con el UAV. Esto conduce a la degradación de la calidad y la fuerza de la señal, o la pérdida de la comunicación a tierra. Cada UAV está equipado con un dispositivo receptor/transmisor inalámbrico capaz de transmitir y recibir paquetes de datos hacia y desde la estación en tierra. Sin embargo, el medio inalámbrico no es fiable. Las comunicaciones inalámbricas están sujetas a intrusiones ambientales que interfieren con las señales y bloquean sus trayectorias, introduciendo ecos, ruidos e interferencias. (Johry and Kapoor, 2016). Un fallo de comunicación es una pérdida temporal o permanente de información entre el UAV y el equipo de control (Camille Alain Rabbath, 2010). Los fallos de comunicación durante el vuelo pueden ser debido a varias razones como por ejemplo choque del UAV, presencia de obstáculos como montañas, árboles y edificios, así como averías en los dispositivos receptor/transmisor o en el controlador de vuelo. Esta pérdida de comunicación a tierra puede resultar en la pérdida de la aeronave, por lo tanto, el mantenimiento del enlace de datos entre la estación de control en tierra y la aeronave es fundamental..
(28) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 18. 1.6.4 Fallo de batería La batería baja durante la operación del UAV podría conducir al mal funcionamiento del hardware ya que no se dispone de suficiente cantidad de carga para el correcto funcionamiento de los componentes. La perforación de la batería puede causar el incendio de esta. Un peligro particular es que el fuego puede no comenzar de inmediato, pero puede empezar minutos u horas después de haberse producido el daño (Hobbs and Herwitz, 2006). La alta temperatura de la batería conduce al sobrecalentamiento y puede provocar que la fuente de alimentación quede inutilizable. Algunas baterías tienen una tensión mínima por debajo de la cual la batería queda inservible e incluso puede arder o explotar (Martínez Olondo, 2015). Si la batería se avería durante el vuelo, el vehículo no dispondrá de una fuente de energía para su funcionamiento y caerá al suelo. 1.6.5 Averías estructurales Existen muchas fuentes de posibles daños irreversibles a las aeronaves que pueden ser clasificadas como averías estructurales. Estas pueden cambiar las condiciones de operación de la aeronave debido a cambios en los coeficientes aerodinámicos o un cambio en el centro de gravedad, constituyendo un cambio para la dinámica del sistema (Sadeghzadeh and Zhang, 2011). Ejemplos de averías que causan daños estructurales en el caso de un UAV de ala fija son el daño del ala y el desprendimiento de superficies de control. En el caso de un UAV de ala rotatoria el daño de las hélices, así como el de los motores que permiten el movimiento de las mismas son los principales daños estructurales. La separación de algunas partes del cuerpo de la aeronave es una avería estructural que puede presentarse tanto en vehículos de ala fija como en vehículos de ala rotatoria. 1.6.6 Averías electrónicas Las averías electrónicas representan aproximadamente el 25% de todas las averías (Caswell and Dodd, 2014). Los sistemas militares de UAV proporcionan una creciente protección contra los fallos inducidos por el ser humano y un mejor rendimiento gracias a mejoras en el software de control de vuelo. Estos sistemas también tienen múltiples sensores para detectar y predecir el deterioro o averías. Sin embargo, los sistemas comerciales de bajo costo atractivos para algunas de las pequeñas y medianas empresas pueden no tener el mismo nivel.
(29) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 19. de redundancia para proporcionar una operación a prueba de fallos. Esto pondrá una mayor dependencia en la fiabilidad de cada componente electrónico. Entre los típicos componentes electrónicos de un UAV comercial se encuentran el controlador de vuelo, radio telemetría, sensores, batería, GPS, entre otros. Esta electrónica es bastante sofisticada y, en consecuencia, hay varias oportunidades para un fallo electrónico. En estos componentes electrónicos pueden ocurrir averías producto de una descarga electroestática, sobretensión eléctrica, altas temperaturas, vibraciones que causan daños en los conectores y las soldaduras, etcétera (Caswell and Dodd, 2014). Debido a la presencia de estas averías, se deben conocer cuáles son los rangos ambientales que los UAV pueden soportar (temperaturas, presiones, vibraciones en el vuelo, choque en el aterrizaje, turbulencia (Whitlock, 2014)) sin incurrir en una avería eléctrica, para evitar accidentes. 1.6.7 Factor Humano El control de los vehículos aéreos es todo un desafío y más aún el de los vehículos aéreos no tripulados al ser controlados en tierra por el hombre. La naturaleza no tripulada del concepto presupone que el hombre es el factor limitante en el éxito de ciertas misiones. La ausencia del piloto del vehículo minimiza la necesidad humana y maximiza la tasa de éxito para las misiones. A pesar de esto, el vehículo puede desviarse de su trayectoria prevista y suponer una amenaza de colisión. La causa de tal comportamiento puede ser debido al error del piloto o a la interferencia del UAV por las fuerzas hostiles, por lo que el equipo necesita prestar atención a ese comportamiento inesperado (Johry and Kapoor, 2016). El piloto puede interferir con el control autónomo a bordo que conduce a conflictos entre los dos y, por tanto, al error humano. 1.6.8 Efectos ambientales Una degradación en el rendimiento de los sensores y actuadores del UAV puede ser el resultado de mal tiempo u otros efectos ambientales adversos. El ambiente puede incluir otros vehículos (tripulados o no tripulados), fenómenos naturales (fuertes vientos, huracanes, frío, calor, humedad, sequedad, incendios, tormentas de arena, tormentas de nieve, entre otros), estructuras artificiales, animales, humanos, sustancias tóxicas, etcétera (Camille Alain Rabbath, 2010). En tales casos, el control de las aeronaves podría perderse y resultar en la.
(30) CAPÍTULO 1. MARCO CONCEPTUAL RELACIONADO CON LOS VEHÍCULOS AUTÓNOMOS AÉREOS Y SUS FALLOS. 20. pérdida del UAV. Por lo tanto, es importante tener en cuenta estos efectos para salvaguardar el UAV. También es difícil detectar tales condiciones y responder de manera eficaz. 1.7. Consideraciones parciales. Luego de realizar un estudio profundo de los fundamentos relacionados con los vehículos autónomos aéreos y sus fallos se llega a las siguientes consideraciones: . El estudio realizado de los fallos en vehículos autónomos aéreos demuestra que es posible efectuar una sistematización del conocimiento de los fallos que se pueden presentar en los vehículos autónomos aéreos.. . Los fallos pueden presentarse en cualquier tipo de UAV, ya sea de ala fija o ala rotatoria.. . Los fallos incipientes a pesar de ser menos severos en comparación con otros, pueden degradar el rendimiento del sistema si se dejan sin vigilancia durante un largo período de tiempo.. . Los fallos en sensores alteran las mediciones requeridas por el controlador, pudiendo verse comprometido el comportamiento del sistema en lazo cerrado.. . El desgaste operacional de actuadores en UAV es un aspecto de vital importancia que puede traer consigo inestabilidad en el vehículo o la pérdida del control.. . La pérdida de comunicación a tierra puede resultar en la pérdida de la aeronave, por lo tanto, el mantenimiento del enlace de datos entre la estación de control en tierra y la aeronave es fundamental.. . La ocurrencia de accidentes de UAV no solo es posible debido a la presencia de fallos y averías, sino también al error humano..
(31) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 21. CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 2.1. Introducción. En este capítulo se realiza un estudio del UAV quadcopter X4 GARP. Se muestra un análisis de su funcionamiento, así como descripción de sus componentes. Se explican los modos de vuelo básicos que posee y se realiza una descripción de cada uno. Se presentan los principales fallos que pueden aparecer en el quadcopter durante el vuelo. Por último, se realiza una breve descripción del software Mission Planner y la función que juega este en el análisis de fallos presentados durante el vuelo. 2.2. Descripción del funcionamiento del Quadcopter X4 GARP. El quadcopter X4 GARP mostrado en la figura 2.1 es propulsado por 4 rotores. El giro de las hélices del quadcopter generan un flujo de aire descendente que proporciona una fuerza de empuje sobre el cuerpo que sustenta el vehículo durante el vuelo. Variando las fuerzas de empuje individuales de cada rotor, a través de la tensión aplicada a los motores, es posible modificar los ángulos de alabeo (roll), cabeceo (pitch) y guiñada (yaw) (Fernández, 2014). La variación de estos tres ángulos de forma controlada, posibilita el movimiento del quadcopter en todas las direcciones del espacio. Cada motor / hélice gira en la dirección opuesta a los dos motores a ambos lados de éste, es decir, los motores en las esquinas opuestas del marco giran en la misma dirección. El quadcopter puede controlar sus movimientos de alabeo y cabeceo al acelerar dos motores en un lado y disminur la velocidad de los otros dos. Así, por ejemplo, el quadcopter para moverse a la izquierda acelera los motores en el lado derecho del marco y disminuye la.
(32) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 22. velocidad de los dos a la izquierda. Para moverse a la derecha realiza el procedimiento contrario al anteriormente descrito. De manera similar, para moverse hacia delante, acelera los dos motores traseros y disminuye la velocidad de los dos delanteros. El procedimiento inverso al realizado para moverse hacia delante, se ejecuta para moverse hacia atrás. El quadcopter puede controlar el movimiento de guiñada, o sea cambiar su orientación, al acelerar los dos motores que están diagonalmente uno frente a otro y disminuir la velocidad de los otros dos. La altitud se controla al acelerar o disminuir la velocidad de todos los motores al mismo tiempo.. Figura 2.1: Quadcopter X4 GARP. 2.3. Elementos del Quadcopter X4 GARP. En este epígrafe, se presentan y describen los principales componentes que constituyen al quadcopter. Por otra parte, se analiza la función de cada componente en el sistema de forma que se logre un mejor entendimiento del conjunto. 2.3.1 Estructura La estructura del quadcopter, mostrada en la figura 2.2, es el marco sobre el que están montados todos los demás elementos. El marco está construido de fibra de vidrio, lo que hace que el quadcopter sea muy resistente a accidentes u otros eventos desagradables. Está compuesto por una placa central donde se ubican los elementos electrónicos y cuatro brazos unidos a la placa central que soportan los motores y las hélices. La estructura está instalada.
(33) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 23. sobre cuatro soportes que le dan al quadcopter una mayor elevación con respecto al suelo. El vehículo posee configuración en equis (X). En esta configuración los motores están colocados en forma de equis, de manera que en las cuatro caras del quadcopter siempre están presentes dos motores.. Figura 2.2: Estructura de fibra de vidrio. 2.3.2 Motores En la actualidad existen dos tipos de motores de corriente continua para su uso en quadcopters: los motores con escobillas (brushed) y los motores sin escobillas (brushless). La diferencia entre estos motores radica precisamente en el uso o no de escobillas. En los motores con escobillas, éstas son usadas para transmitir la electricidad a la bobina, la cual se encuentra en el rotor y lo hace girar; mientras que los imanes se encuentran en el estator y se mantienen fijos. El hecho de tener escobillas provoca el rozamiento de éstas con las placas que llevan la corriente, generando calor y deteriorando poco a poco el material (Sáez, 2015). Es por esto que estos motores requieren de mantenimiento y son menos eficientes que los motores sin escobillas. En el caso de los motores brushless que son los que utiliza el quadcopter X4 GARP los imanes se encuentran en el rotor y las bobinas en el estator, de forma que no se necesitan escobillas para transmitir la electricidad al rotor. En este tipo de motor la corriente eléctrica pasa directamente por los bobinados del estator. Esta corriente eléctrica genera un campo electromagnético que interacciona con el campo magnético creado por los imanes del rotor, haciendo que aparezca una fuerza que hace girar al rotor y por lo tanto al eje del motor (Baselga, 2014)..
(34) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 24. Para modificar la velocidad de giro de estos motores es necesario utilizar controladores electrónicos de velocidad que se explican más adelante. Los motores que utiliza el quadcopter son DJI 2212-920 Kv como el que se muestra en la figura 2.3. El factor Kv indica el número de revoluciones por minuto (rpm) a las que es capaz de girar el motor por cada voltio de tensión que se le aplica.. Figura 2.3: Motor DJI 2212-920 Kv. Las características del motor son las siguientes (Motor, 2016): . Dimensión: 28x24mm.. . Potencia: 920 Kv.. . Peso: 53g.. . Batería: 3S, 4S.. . Corriente estándar: 15-25A.. . Corriente máxima: 30A.. . Temperatura de trabajo: -5°C a 40°C.. 2.3.3 Hélices Las hélices son las encargadas de propulsar el quadcopter en el aire y son las que más golpes van a sufrir de entre todos los elementos que conforman el vehículo y las más frágiles. Es muy importante elegir bien las dimensiones de las hélices pues de ello depende que el quadcopter vuele con una buena estabilidad. Las hélices que utiliza el quadcopter como la mostrada en la figura 2.4 son de dos aspas y tienen un tamaño de 9.5 pulgadas con un ángulo de torsión de 4.7 grados (9.5x4.7). Están fabricadas de una mezcla de materiales que les proporciona poco peso y bastante flexibilidad para evitar roturas..
(35) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 25. Figura 2.4: Hélice 9.5x4.7. 2.3.4 Controlador electrónico de velocidad Un controlador electrónico de velocidad, en inglés electronic speed control (ESC), es un dispositivo electrónico, empleado para controlar la velocidad de giro de un motor (Baselga, 2014). La señal de control que reciben los ESC es una señal PWM (Modulación por Ancho de Pulso), con la que controlan la velocidad de rotación de los motores brushless. Las dos conexiones de alimentación de cada controlador van conectadas a una placa distribuidora de energía a la cual está conectada la batería del vehículo. Los controladores electrónicos de velocidad que utiliza el quadcopter son el modelo Simonk 30A como el que se muestra en la figura 2.5.. Figura 2.5: Controlador electrónico de velocidad Simonk 30A. Las especificaciones del ESC son las siguientes (Motor, 2016): . Corriente máxima: 30A.. . Peso: 28g.. . Dimensión: 50x23x8mm.. 2.3.5 Batería Las baterías de Polímero de Litio o LiPo por su abreviatura en inglés, son un tipo de baterías recargables de alto rendimiento. Estas tienen una gran densidad energética, en comparación.
(36) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 26. con las demás baterías del mercado. Esto significa que su masa es pequeña en comparación con la energía que pueden almacenar. Tienen una alta capacidad de descarga, esto resulta muy beneficioso puesto que la potencia de los motores para levantar y permitir el vuelo del vehículo es elevada. Tienen un ciclo de vida largo, permitiendo cientos de cargas y descargas (Martínez Olondo, 2015). Todas estas características las hace muy adecuadas para un quadcopter. De hecho, son las más recomendadas para este tipo de aplicaciones. El quadcopter X4 GARP es alimentado por una batería LiPo mostrada en la figura 2.6. Cuando está completamente cargada, la batería proporciona hasta 30 minutos de tiempo de vuelo aproximadamente, dependiendo de las condiciones ambientales y el estilo de vuelo. La batería se encarga de alimentar todos los componentes electrónicos del vehículo para su funcionamiento.. Figura 2.6: Batería LiPo 3DR 4S 14.8V 6000 mAh 35C. El modelo de la batería es 3DR 4S 14.8V 6000 mAh 35C y sus especificaciones son las siguientes (Martínez Olondo, 2015): . Capacidad: 6000mAh.. . Configuración: 4S / 14.8V / 4 celdas.. . Constante de descarga: 35C.. . Peso: 610g.. . Dimensión: 15.5x4.67x3.94cm.. 2.3.6 GPS El quadcopter posee un módulo GPS con brújula (compass) interna que permite determinar la posición y orientación del vehículo. Este sistema posee un bajo consumo de energía y.
(37) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 27. brinda una alta precisión. El módulo GPS mostrado en la figura 2.7 va conectado al controlador de vuelo y es imprescindible para el funcionamiento de varios modos de vuelo que requieren bloqueo de GPS (GPS+Compass, 2012).. Figura 2.7: Módulo GPS con brújula Ublox M8N. Se obtiene un bloqueo cuando el GPS recibe datos de posicionamiento de múltiples satélites. La conexión a cuatro satélites activos produce un bloqueo del GPS. El GPS puede tardar varios minutos en adquirir el bloqueo. Especificaciones del GPS: . Precisión de la navegación: 0.3 grados.. . Precisión de localización horizontal: 2.0 m.. . Velocidad de actualización: 10Hz.. Límites de operación: . Gravedad: < 4G.. . Altura: 50000 m.. Velocidad: 500 m / s. 2.3.7 Controlador de vuelo El controlador de vuelo Pixhawk PX4 mostrado en la figura 2.8 es un sistema de piloto automático moderno fabricado por la compañía 3DR (3D Robotics). Cuenta con tecnología avanzada, ofreciendo un rendimiento increíble y fiabilidad para controlar vehículos autónomos. Es posible ajustar las configuraciones del controlador según el vehículo en el que se desee utilizar. En este caso está establecido para quadcopter en configuración X. En los.
(38) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 28. últimos años, como uno de los sistemas de piloto automático, Pixhawk ha ganado una popularidad profunda por ser práctico, fácil de manejar, económico y de poco peso (38 gramos).. Figura 2.8: Controlador de vuelo Pixhawk PX4. El PX4 posee un procesador de 32-bits ARM Cortex que trabaja a 168 MHz, con 256 KB de RAM y 2 MB de memoria flash. Este controlador viene acompañado de elementos como un módulo de alimentación (power module) que se conecta a la batería del vehículo, un switch de seguridad que indica el estado de los motores para poder manejar el quadcopter con seguridad, un zumbador, así como varios cables de conexión. A este se conectan el resto de los componentes electrónicos para lograr el funcionamiento del vehículo. Posee un LED central que indica el estado del quadcopter. Durante el vuelo, el LED no será visible, por lo que se necesita una estación terrestre para ver el estado del vehículo. Dicho controlador incorpora un conjunto de sensores tales como giróscopo, magnetómetro, acelerómetro en su estructura capaces de medir la velocidad, la orientación y las aceleraciones del cuerpo. El controlador de vuelo posee además un barómetro para medir la presión atmosférica. Con esta presión, que varía en función de la altura a la cual se esté midiendo, se puede obtener la altura a la que se encuentra el sensor. Las medidas de los sensores son procesadas en el controlador de vuelo y son utilizadas para calcular los cambios en las velocidades de los motores, de forma que se mantenga en equilibrio el vehículo (Robotics). Las dimensiones del Pixhawk son las siguientes: . Largo: 81.5 mm..
(39) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. . Ancho: 50 mm.. . Altura: 15.5 mm.. 29. 2.3.8 Sistemas de comunicación El control del quadcopter en modo manual se realiza a través de un sistema de comunicación inalámbrico (radio control). El transmisor DEVO F7 utilizado para el envío de señales por radio transmite a una frecuencia de 2.4 GHz y se comunica con el receptor DEVO RX701 situado en el quadcopter (Robotics). El receptor comunica al controlador la nueva dirección a tomar lo cual, junto con las medidas obtenidas de los sensores incluidos en el controlador permite actuar sobre las velocidades de los motores variando la tensión aplicada a los mismos. Los dispositivos transmisor y receptor utilizados por el quadcopter para la comunicación por radio control se muestran en la figura 2.9 de izquierda a derecha respectivamente. La comunicación por radio control tiene como limitante una distancia máxima de 500 m.. Figura 2.9: Transmisor DEVO F7 2.4 GHz y receptor DEVO RX701 2.4 GHz. La comunicación con el quadcopter para vuelo autónomo se realiza a través de una estación en tierra. Dicha estación está equipada con una laptop conectada a un radio enlace que se utiliza para trazar la trayectoria a seguir en el vuelo, además de la monitorización y la supervisión durante el mismo. El quadcopter también está equipado con un radio enlace para la comunicación con la laptop en tierra. En la figura 2.10 se muestran los dispositivos encargados de establecer la comunicación de forma inalámbrica entre la estación en tierra y.
(40) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 30. el vehículo (Robotics). La comunicación se realiza a una frecuencia de 915 MHz y tiene como limitante una distancia máxima de 2000 m.. Figura 2.10: Dispositivos de Radio Telemetría. Cabe destacar que el despegue y el aterrizaje del quadcopter pueden hacerse tanto de forma manual como de forma automática. Esto dependerá de la decisión del operador o de las situaciones que se puedan presentar durante el vuelo. 2.4. Modos de vuelo. Los modos de vuelo del quadcopter se controlan a través del transmisor RC mediante un interruptor, a través de comandos de misión, o mediante comandos desde la laptop conectada a un radio enlace (Copter, 2016d). El quadcopter posee cinco modos de vuelo básicos: modo automático (Auto), modo loiter, modo estable (Stabilize), modo RTL (Return To Launch) y modo aterrizaje (Land). Estos dos últimos modos mencionados son utilizados fundamentalmente como medida de seguridad ante determinados fallos. 2.4.1 Modo Automático (Auto) El modo de vuelo automático permite volar una misión autónoma. El quadcopter seguirá un trayecto de misión pre-programado, o sea volará de manera automática la serie de waypoints guardados en el piloto automático. El modo automático no debe activarse a menos que se haya guardado una misión. Este modo utiliza datos de posicionamiento del GPS por lo que.
(41) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 31. requiere un bloqueo del GPS antes del despegue. Este modo puede ser activado antes del despegue para que el vehículo inicie la misión desde que parte del punto de lanzamiento o puede activarse en el aire después de haber iniciado el vuelo manualmente. Una buena señal GPS, baja interferencia magnética de la brújula y bajas vibraciones son muy importantes en el logro de un buen rendimiento del modo automático (Copter, 2016a). 2.4.2 Modo Loiter En el modo loiter el quadcopter intenta mantener la ubicación actual. Se utiliza el transmisor RC para ajustar la posición del quadcopter y cuando se sueltan los joysticks el vehículo desacelera hasta detenerse y mantiene la posición (Copter, 2016f). Este modo es una gran manera para que los inexpertos aprendan cómo volar y utiliza al igual que el modo automático los datos de posicionamiento brindados por el GPS, de ahí que requiera un bloqueo del GPS antes del despegue. Los mismos requisitos que posee el modo Automático para un buen rendimiento son necesarios para el modo loiter. 2.4.3 Modo Estable (Stabilize) El modo de vuelo estable permite volar el quadcopter de forma manual usando el transmisor RC. Este modo auto-nivela los ejes de alabeo y de cabeceo, es decir que cuando se libera el joystick que permite el movimiento en estos ejes, el vehículo se nivela automáticamente. Este modo no requiere de bloqueo del GPS para su funcionamiento (Copter, 2016i). Para mantener el vehículo en su sitio al ser empujado por el viento es necesario introducir con regularidad los mandos de alabeo y de cabeceo. 2.4.4 Modo RTL (Return To Launch) El modo RTL permite que el quadcopter regrese desde su posición actual hasta el punto de lanzamiento. El comportamiento del modo RTL puede ser controlado por varios parámetros ajustables. Es un modo dependiente del GPS, por lo que es necesario tener un bloqueo GPS para utilizar este modo (Copter, 2016h)..
(42) CAPÍTULO 2. ESTUDIO DEL QUADCOPTER X4 GARP Y SUS PRINCIPALES FALLOS. 32. 2.4.5 Modo Aterrizaje (Land) El modo aterrizaje se usa para finalizar el vuelo y aterrizar en la posición actual. Este modo no requiere de bloqueo del GPS para su funcionamiento (Copter, 2016e). Su mayor utilización es en caso de situaciones de emergencia. 2.5. Principales fallos que se pueden presentar en la operación del quadcopter X4 GARP. El quadcopter al ser un vehículo complejo debido a los sistemas que posee tanto para el control de su movimiento como para su comunicación, puede presentar una serie de fallos en su operación. Estos fallos causan diferentes grados de degradación en el sistema y pueden llegar a ser gradualmente peores, por lo que deben ser detectados a tiempo. En este epígrafe, se muestran los principales fallos que se pueden presentar en la operación del vehículo, los cuales se han seleccionado teniendo en cuenta la bibliografía especializada y la consulta a especialistas a partir de las experiencias de vuelos realizados. Fallos mecánicos Entre los fallos mecánicos se pueden incluyen fallos de un motor o un ESC, o una hélice mal ajustada. En los motores se pueden producir fallos producto del desgaste operacional que conducen a una generación de empuje insuficiente y traen consigo inestabilidad en el vehículo o la pérdida del control. Por otra parte, el fallo por calentamiento ocurre si la temperatura del motor sobrepasa el valor máximo de su temperatura de trabajo correspondiente a 40°C. Aunque esta temperatura no afecte el correcto funcionamiento del motor durante un tiempo, puede dañar componentes del motor y dar lugar a una avería (Johry and Kapoor, 2016). Tal calentamiento se puede producir debido a la realización de varios vuelos, con poca diferencia de tiempo entre estos, que causa un uso inmoderado del motor. El quadcopter no posee un protector de hélice como medida de seguridad. Cuando el vehículo está en vuelo sus hélices giran a alta velocidad. Si alguna hélice hace contacto con un objeto, ya sea fijo o móvil, el daño podría ser devastador porque pudiera partirse dicha hélice e impedir así la continuidad del vuelo debido a una generación de empuje insuficiente..
Figure



+7




Documento similar
Abstract: This paper reviews the dialogue and controversies between the paratexts of a corpus of collections of short novels –and romances– publi- shed from 1624 to 1637:
En junio de 1980, el Departamento de Literatura Española de la Universi- dad de Sevilla, tras consultar con diversos estudiosos del poeta, decidió propo- ner al Claustro de la
Después de una descripción muy rápida de la optimización así como los problemas en los sistemas de fabricación, se presenta la integración de dos herramientas existentes
por unidad de tiempo (throughput) en estado estacionario de las transiciones.. de una red de Petri
Missing estimates for total domestic participant spend were estimated using a similar approach of that used to calculate missing international estimates, with average shares applied
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
La siguiente y última ampliación en la Sala de Millones fue a finales de los años sesenta cuando Carlos III habilitó la sexta plaza para las ciudades con voto en Cortes de
