Modelación del comportamiento del motor jaula de ardilla utilizando MatLab/Simulink
79
0
0
Texto completo
(2) Universidad Central “Marta Abreu” de Las Villas Facultad de Ingeniería Eléctrica Departamento de Electroenergética. TRABAJO DE DIPLOMA Modelación del comportamiento del motor jaula de ardilla utilizando MatLab/Simulink. Autor: Eduardo Stincer Mederos [email protected]. Tutor: Dr. Ing. Angel Valcárcel Rojas [email protected]. MSc. Ing. Alberto A. Limonte Ruíz [email protected] Santa Clara 2016 "Año 58 de la Revolución".
(3) Hago constar que el presente trabajo de diploma fue realizado en la Universidad Central “Marta Abreu” de Las Villas como parte de la culminación de estudios de la especialidad de Ingeniería Eléctrica, autorizando a que el mismo sea utilizado por la Institución, para los fines que estime conveniente, tanto de forma parcial como total y que además no podrá ser presentado en eventos, ni publicados sin autorización de la Universidad.. Firma del Autor Los abajo firmantes certificamos que el presente trabajo ha sido realizado según acuerdo de la dirección de nuestro centro y el mismo cumple con los requisitos que debe tener un trabajo de esta envergadura referido a la temática señalada.. Firma del Autor. Firma del Jefe de Departamento donde se defiende el trabajo. Firma del Responsable de Información Científico-Técnica.
(4) i. ‘‘No fracasé, sólo descubrí 999 maneras de cómo no hacer una bombilla. ’’ Thomas Alva Edison.
(5) ii. DEDICATORIA. A Julio, Robert, Carlos y Javier. A las tantas horas y a los tantos recuerdos. Por ser amigos. A Pocholo, Chang, Wendy y Liset, porque si tengo la certeza de no alejarme nunca de alguien, es de ustedes. A Yoslandy y Oscar, por enseñarme a ser sabio sin dejar de ser joven. A Patry y Anabel…por vikingas! A Yoly, porque la distancia no mata el cariño. A mis viejos, en especial a Mami, por criarme y no abandonarme ni siquiera yéndose lo más lejos que se puede. A mis tíos y primos. A mi hermana adorada. A mis padres, porque con decir PADRES ya se dice todo! Y yo puedo repetirlo muchas veces. A Viviana, porque a la primera línea van todos los ojos, y tú eres toda para mí..
(6) iii. AGRADECIMIENTOS. A Carlos, más que amigo, hermano nacido el primer día de universidad. Gracias por acogerme en tu casa todas las veces que fue necesario. A Viviana, por sufrir y gozar conmigo estos cinco años de amor y universidad. Por el apoyo que me das y los sentimientos que demuestras. A profesores y compañeros de carrera, por ayudar a formarme. Gracias por lo que cada uno aportó..
(7) iv. TAREA TÉCNICA. 1.. Evaluación del estado del arte en la modelación de motores eléctricos.. 2.. Evaluar los diferentes modelos de motores que tiene el Simulink del MatLab.. 3.. Determinación de los modelos de diferentes tipos de motores.. 4.. Modelación en MatLab del modelo seleccionado.. 5.. Comprobación de los resultados obtenidos en el trabajo con los obtenidos por otros. autores.. Firma del Autor. Firma del Tutor.
(8) v. RESUMEN. Hace años que la electricidad es la energía fundamental con la que cuenta el hombre. Su utilización se ha expandido haciéndose símbolo del desarrollo tecnológico. Y es precisamente el motor eléctrico la principal fuerza de trabajo en estos tiempos modernos. Debido a su amplia utilización se ha ganado un lugar tanto en el hogar como en la industria. Bien sea como equipo electrodoméstico, herramienta de trabajo o músculo en una fábrica, su utilidad es innegable y en cuanto a su función, se puede considerar irremplazable. Para la profundización en su estudio, se propone la creación de una aplicación que permita la modelación de sus características y la simulación de su comportamiento ante determinados fenómenos. Se emprende su desarrollo utilizando MatLab y aprovechando el modelo de máquina asincrónica contenido en sus librerías. Para ello se realiza una búsqueda bibliográfica, repasando la historia y evolución, así como las características de las máquinas asincrónicas, en especial, el motor jaula de ardilla, escogido como objeto de estudio debido a su amplio uso. Se modela el sistema a través de Simulink, programando una interfaz gráfica en MatLab para facilitar la manipulación de datos. Los resultados obtenidos son analizados y comparados con los de otros autores..
(9) vi. TABLA DE CONTENIDOS DEDICATORIA .................................................................................................................... ii AGRADECIMIENTOS ........................................................................................................ iii TAREA TÉCNICA ................................................................................................................iv RESUMEN ............................................................................................................................. v INTRODUCCIÓN .................................................................................................................. 1 Organización del informe ................................................................................................... 4 CAPÍTULO 1. 1.1. NOCIONES BÁSICAS ............................................................................. 5. El motor asincrónico ................................................................................................ 5. 1.1.1. Características del motor asincrónico ............................................................... 7. 1.1.2. El motor jaula de ardilla.................................................................................. 10. 1.2. El modelo de máquina eléctrica ............................................................................. 13. 1.2.1. Modelo de máquina asincrónica en Simulink ................................................. 18. CAPÍTULO 2.. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN ............. 22. 2.1. MatLab/Simulink como herramientas de simulación ............................................ 22. 2.2. Desarrollo del software .......................................................................................... 25. 2.2.1. Construcción de la interfaz gráfica ................................................................. 26. 2.2.2. Construcción de la interfaz gráfica ................................................................. 32. 2.3. Manual de uso ........................................................................................................ 38. CAPÍTULO 3. 3.1. ANÁLISIS DE RESULTADOS.............................................................. 42. Simulación de arranques ........................................................................................ 42. 3.1.1. Arranque en vacío ........................................................................................... 42. 3.1.2. Arranque a carga constante ............................................................................. 45. 3.2. Simulación del régimen permanente ...................................................................... 46.
(10) vii 3.2.1. Carga constante en régimen permanente ........................................................ 47. 3.2.2. Régimen permanente ante un pulso de carga.................................................. 49. 3.3. Simulación de sobrecarga ...................................................................................... 52. 3.3.1. Sobrecarga de un 25% .................................................................................... 52. 3.3.2. Sobrecarga de un 50% .................................................................................... 53. 3.3.3. Sobrecarga de un 75% .................................................................................... 54. 3.3.4. Sobrecarga de un 100% .................................................................................. 55. 3.4. Comparación de resultados .................................................................................... 57. 3.4.1. Arranque en vacío ........................................................................................... 58. 3.4.2. Arranque a carga constante ............................................................................. 59. 3.4.3. Carga constante en régimen permanente ........................................................ 61. 3.4.4. Régimen permanente ante un pulso de carga.................................................. 63. CONCLUSIONES Y RECOMENDACIONES ................................................................... 67 Conclusiones ..................................................................................................................... 67 Recomendaciones ............................................................................................................. 67 REFERENCIAS BIBLIOGRÁFICAS ................................................................................. 68.
(11) INTRODUCCIÓN. 1. INTRODUCCIÓN. Los motores eléctricos ocupan desde hace años un lugar clave en la vida del ser humano; desde equipos electrodomésticos y herramientas hasta maquinaria industrial, estas máquinas eléctricas han colonizado el entorno siendo hasta cierto punto imprescindibles en la actualidad. Los motores resultaron ser la solución para un sinnúmero de problemas técnicos. Permitieron la creación de equipos electrodomésticos como lavadoras, ventiladores, batidoras. Permitieron el perfeccionamiento de las herramientas de trabajo como taladros y sierras, antes accionadas de forma manual y revolucionaron la industria convirtiendo a la electricidad en la principal fuerza de trabajo [1]. Es de esperar entonces que, atendiendo a la gran variedad de usos y aplicaciones de estos, el progreso halla demandado la creación de diferentes tipos para calmar las necesidades específicas de cada sistema en el que resultaban de utilidad. Y es precisamente debido a su amplia utilización, que se ha escogido como objeto del presente estudio al motor jaula de ardilla, uno de los más usados gracias a su versatilidad ante los más disímiles sistemas. Este mantiene las características constructivas de otros tantos motores, a excepción del rotor, elemento que difiere por completo y le confiere las propiedades que lo hacen famoso. Es un cilindro montado en un eje. Contiene barras conductoras longitudinales en su interior, normalmente de aluminio o cobre, con surcos y se conecta en forma de cortocircuito en ambos extremos, conformando una suerte de anillos. Los devanados inductores en el estator incitan al campo magnético a rotar alrededor del rotor. El movimiento relativo entre este campo y la rotación del rotor induce corriente eléctrica en las barras conductoras. Estas corrientes reaccionan con el campo magnético del motor.
(12) INTRODUCCIÓN. 2. produciendo una fuerza, dando por resultado un esfuerzo de torsión para dar vuelta al eje [2]. En los últimos años, han ocurrido cambios notables en el estudio de los motores eléctricos, gracias esto, a la evolución tecnológica que ha sufrido el mundo. Uno de los métodos más útiles brindado por la tecnología es la modelación in silico, el uso de computadoras para simular y resolver problemas reales. Una ventaja sin dudas a la hora de determinar la respuesta de un sistema ante una entrada determinada. En general un modelo puede ser entendido como una representación de un objeto que puede ser real o ficticio. Con este se pretende mejorar el conocimiento y la comprensión de un proceso, involucrando el estudio de las interacciones en el sistema al que se le hace el análisis. Por supuesto, la efectividad de los modelos como herramienta de certidumbre científica o para tomar decisiones sobre procesos de ingeniería depende del nivel de correspondencia logrado entre el modelo y el sistema real. La simulación es una técnica numérica que permite realizar experimentos en una computadora. Estos comprenden varios tipos de relaciones matemáticas y lógicas, necesarias para describir el comportamiento y la estructura de sistemas complejos [1]. En la actualidad se dispone de softwares que permiten resolver cierta variedad de problemas de manera eficiente y rápida, disminuyendo enormemente la complejidad de los experimentos. En todas las ramas de la ingeniería se ha vuelto necesario el uso de estos programas informáticos; y tanto los estudiantes como los profesionales deben a estos las facilidades que proveen para el estudio. Sin embargo, la mayoría de estos están dedicados a objetivos específicos y aunque muy potentes, el proceso de aprendizaje es largo, su versionado es costoso y dificultan los proyectos de investigación al no estar disponibles sus códigos [3]. Otros softwares de carácter más general permiten llevar la teoría a sus aplicaciones prácticas y son a su vez una manera de profundizar en esta. Generalmente son programas matemáticos de propósitos generales que permiten un enlace entre las ecuaciones matemáticas explicadas en la teoría y la experimentación en un laboratorio. Entre los más populares está el MatLab [3]..
(13) INTRODUCCIÓN. 3. El término MatLab procede de las palabras anglosajonas “Matrix Laboratory” e inicialmente fue creado para el cálculo de matrices y vectores. Luego, al ir evolucionando, se convirtió en un sistema interactivo cuyo elemento de información básico lo sigue constituyendo la matriz, permitiendo dar solución a complejos problemas numéricos donde tanto estos como sus soluciones se pueden expresar matemáticamente sin necesidad de programar en ningún lenguaje. Una de sus principales características es su versatilidad para su inserción en estudios de disímiles esferas [1]. El Simulink es una extensión del MatLab enfocada en la simulación de sistemas dinámicos y que trae consigo una biblioteca que facilita el modelado de los mismos. La relación entre el software madre y su apéndice es muy estrecha. Una vez definido el modelo realizado en Simulink y corregido, se llevan a MatLab los datos necesarios para estudiar la respuesta del citado modelo. Con el Simulink se puede modelar y simular desde la trayectoria de un proyectil hasta sistemas complejos como equipos electrónicos de potencia o accionamientos de velocidad de motores [1]. Es precisamente MatLab, específicamente con su extensión Simulink, quien permitiría la realización de un modelo capaz de simular el comportamiento de los motores eléctricos. Atendiendo a esto el Problema Científico del presente trabajo sería: ¿Cómo modelar el comportamiento de un motor jaula de ardilla en MatLab? Esto teniendo como Objeto: Los motores eléctricos jaula de ardilla, y como Campo de Acción: La modelación de motores eléctricos. Contando con los anteriores cimientos metodológicos, se determina como Objetivo General de la Investigación: Confeccionar un modelo en el Simulink del MatLab que permita analizar y valorar el comportamiento del motor jaula de ardilla ante determinados estados. Objetivos Específicos: 1.. Realizar una búsqueda bibliográfica sobre la modelación de motores eléctricos. jaula de ardilla. 2.. Evaluar los diferentes modelos de motores jaula de ardilla propuestos en la. literatura para su modelación en Simulink..
(14) INTRODUCCIÓN. 4. 3.. Modelar con MatLab-Simulink el modelo seleccionado.. 4.. Evaluar los resultados obtenidos mediante su comparación con los de otros. autores. Organización del informe El proyecto consta de introducción, tres capítulos, conclusiones y bibliografía. En el primer capítulo se abordan cuestiones básicas sobre simulación con MatLab y el motor jaula de ardilla. En el segundo se da una panorámica de la construcción de una interfaz gráfica de usuario que permita operar el modelo de una manera más intuitiva y se explicará paso por paso el proceso de creación de este. Por último, el tercer capítulo expondrá los resultados de algunas simulaciones realizadas para apreciar el desempeño del software creado comparándolo con los resultados obtenidos por otro autor..
(15) CAPÍTULO 1. NOCIONES BÁSICAS. 5. CAPÍTULO 1. NOCIONES BÁSICAS. 1.1. El motor asincrónico Los principios básicos de electromagnetismo se empezaron a desarrollar en el siglo. XIX, con los experimentos de Oersted, Faraday, Henry, Lenz, Barlow y Maxwell. Dentro de los trabajos realizados por estos científicos, se puede considerar como punto de partida para el estudio de las máquinas eléctricas el principio de inducción electromagnética descubierto por Faraday en 1831. Sus experimentos posteriores demuestran de un modo discutible el principio de conversión de la energía eléctrica en mecánica y viceversa [4]. La ley de inducción de Faraday fue el principio para que muchos científicos e ingenieros buscaran una máquina eléctrica para generar electricidad de un modo diferente al que se conocía en aquellos tiempos. Se puede decir que la ingeniería eléctrica nace en aquel momento. Durante la primera época de desarrollo de esta rama de la técnica, las máquinas eléctricas desempeñaron un papel fundamental, que determinaba el movimiento de toda la ingeniería eléctrica, por su aplicación en los campos de la generación, transformación y utilización de la energía eléctrica [5]. El principio de funcionamiento del motor asincrónico prácticamente reside en el fenómeno de “magnetismo de rotación”, descubierto en el año 1824 por F.D. Arago y explicado más tarde en el año 1831 por M. Faraday. No obstante, en los experimentos de Arago un disco de cobre se ponía en movimiento por medio de un imán giratorio, y no por un campo giratorio creado por un dispositivo inmóvil, como lo es el estator en las máquinas modernas. Durante largo tiempo el fenómeno de Arago no encontraba aplicación práctica. Sólo en el año 1879 U. Bailey inventó un aparato en el cual el desplazamiento espacial del campo magnético se realizaba con ayuda de un dispositivo inmóvil, compuesto por cuatro electroimanes dispuestos a igual distancia del eje de rotación del disco de cobre [4]..
(16) CAPÍTULO 1. NOCIONES BÁSICAS. 6. Para crear el campo magnético giratorio se utilizaba un conmutador especial, que alimentaba a los electroimanes con impulsos de corriente continua de amplitud y dirección correspondientes. Al descubrimiento del fenómeno del campo magnético giratorio en su concepción actual llegaron independientemente uno del otro en el año 1888 el científico italiano G. Ferrari y el científico e inventor yugoeslavo N. Tesla, quien la mayor parte de su vida trabajo en América. Ellos lograron demostrar que dos bobinas, dispuestas bajo un ángulo recto una con respecto a otra y alimentada con dos corrientes sinusoidales alternas iguales, con un desfasaje de 90°, crean un campo magnético giratorio. El vector de inducción de este campo magnético en el punto de intersección de los ejes de las bobinas girará uniformemente sin variar de amplitud. Sin embargo, en el motor bifásico de Ferrari, el rotor estaba formado por un cilindro de cobre, desarrollaba una potencia de sólo 3W y únicamente en un grado muy aproximado recordaba por su estructura al motor asincrónico moderno. Además, partiendo de la suposición incorrecta de la necesidad de explotar el motor a potencia máxima, Ferrari llegó a la conclusión errónea de que el rendimiento del motor asincrónico no puede sobrepasar del 50%. Esto condujo a un debilitamiento notable del interés por los trabajos de Ferrari y frenó por cierto tiempo el desarrollo de la idea técnica, progresista por su esencia. Los motores asincrónicos bifásicos, construidos por N. Tesla (fig. 1.1), se fabricaron cierto tiempo por la firma Westinghouse, donde él trabajaba. El defecto principal del motor de Tesla, debido al cual más tarde fue sustituido por el motor trifásico, era el empleo de devanados concentrados en el estator y el rotor de la máquina. Esto llevaba al empeoramiento de las características de arranque y a la dependencia, notablemente expresada, del momento durante esta etapa.. Fig. 1.1 Motor creado por Tesla..
(17) CAPÍTULO 1. NOCIONES BÁSICAS. 7. La invención de los motores trifásicos asincrónicos con sus particularidades constructivas principales, que se han conservado sin variación hasta nuestros días está relacionada con el nombre de M.O. Dolivo-Dobrovolski. Al conocerse la conclusión pesimista de Ferrari sobre la poca perspectiva de los motores asincrónicos este científico no se conformó y comenzó a elaborar estructuras de los motores asincrónicos, calculadas para la alimentación de un sistema trifásico propuesto por él. En un plazo extraordinariamente corto la actividad intensiva en esta dirección concluyó con el invento de los conjuntos más importantes de los motores asincrónicos trifásicos: el rotor con devanados jaula (1889); el estator con devanados trifásico de tambor repartido; el rotor con devanados trifásico repartido sacado a los anillos de contacto; el reóstato de arranque intercalado en el circuito del devanado del rotor durante el arranque del motor (1890). En Estados Unidos se unieron las compañías Westinghouse y Thomson-Houston para fabricar motores asincrónicos trifásicos, para ello resultó de gran utilidad en aquel momento el invento del ingeniero C.F. Scott de la empresa Westinghouse para transformar un sistema bifásico en trifásico y poder alimentar a estas máquinas. El rotor jaula de ardilla construido mediante barras de aluminio, fue patentado en 1916 por H.G. Reist y. H.. Maxwell de la compañía General Electric [6]. Los perfeccionamientos en el diseño de máquinas eléctricas contribuyeron a nuevas posibilidades de su empleo práctico y estimulaban el progreso futuro y las más diversas aplicaciones de la energía eléctrica, lo que explica el hecho de que los científicos e ingenieros le prestaran especial atención, y de que estas adquirieran rápidamente la perfección técnica que poseen actualmente.. 1.1.1 Características del motor asincrónico Se llama máquina asincrónica a la máquina eléctrica de dos devanados de corriente alterna en la cual sólo un devanado (el primario) recibe alimentación de la red eléctrica con frecuencia constante, mientras que el otro devanado se cortocircuita o se cierra a las resistencias eléctricas. Las corrientes en el devanado secundario aparecen como resultado de la inducción electromagnética, de ahí que a estas máquinas se les conozca como máquinas de inducción. La frecuencia en este devanado está estrechamente vinculada a la.
(18) CAPÍTULO 1. NOCIONES BÁSICAS. 8. velocidad angular del motor, la cual a su vez depende del momento de rotación aplicado [7]. La máquina asincrónica o de inducción al igual que cualquier otro dispositivo de tipo rotativo que convierte la energía eléctrica en mecánica, está formada por un estator y un rotor. En el estator se coloca normalmente el inductor, alimentado por una red monofásica, bifásica o trifásica. El rotor es el inducido, y las corrientes que circulan por él aparecen como consecuencia de la interacción con el flujo del estator. Éste está formado por un apilamiento de chapa de acero al silicio, disponen de unas ranuras en su periferia interior en las que se sitúa un devanado ya sea monofásico o trifásico distribuido en todo el estator, alimentado por una corriente del mismo tipo, de tal forma que se tiene un flujo giratorio de amplitud constante distribuido sinusoidalmente por el entrehierro. El estator está rodeado por la carcasa, disponiéndose en esta las correspondientes patas de fijación y los anillos o cáncamos de elevación y transporte [6]. Las que mayor distribución han tenido son las máquinas asincrónicas con devanados simétricos trifásicos con polos de distinto signo en el estator alimentados desde la red de corriente alterna, y con devanados simétricos trifásicos o bifásicos con polos de distinto signo en el rotor. Las máquinas asincrónicas se utilizan principalmente como motores; en calidad de generadores se emplean raramente. El motor asincrónico es el tipo más divulgado de motor de corriente alterna. El devanado del rotor de un motor asincrónico puede ser en jaula o de fase. Los más aplicados son los motores con devanado en jaula en el rotor, o motores en cortocircuito, cuya fabricación es barata y la explotación fiable. En el rotor jaula de ardilla (fig. 1.2) se tiene una serie de conductores de cobre o aluminio puesto en cortocircuito por dos anillos laterales (el nombre de jaula proviene del aspecto que toma este devanado si se omitiera el apilamiento de hierro); en la actualidad, en las máquinas pequeñas, se aplica un método de fundición de aluminio, con el que se producen al mismo tiempo las barras del rotor y los anillos laterales, resultando un conjunto [8]..
(19) CAPÍTULO 1. NOCIONES BÁSICAS. 9. Fig. 1.2 Aspecto del rotor jaula de ardilla sin el apilamiento de hierro. Los motores con devanado en jaula en el rotor poseen también un momento de rotación de arranque inicial bastante alto. Sus defectos principales son: la dificultad de realizar la regulación suave de la frecuencia de rotación entre amplios límites y el consumo de corrientes de alta intensidad de la red durante el arranque (que superan de 5 a 7 veces la corriente nominal). Los motores con devanado de fase o motores de anillos están exentos de estos defectos a cuenta de la complicación de la estructura del rotor, lo que conduce a su notable encarecimiento en comparación con los motores en cortocircuito. Por esta razón, estos motores se emplean sólo en los casos de pesadas condiciones de arranque, así como en casos de necesidad de regular suavemente la frecuencia de rotación. En el caso del rotor devanado o con anillos, se tiene un arrollamiento trifásico similar al situado en el estator, en el que las tres fases se conectan por un lado en estrella y por el otro se envían a unos anillos aislados entre sí. Esta disposición hace posible la introducción de resistencias externas por los anillos para limitar las corrientes de arranque, mejorar las características del momento y controlar la velocidad. Con ayuda de las escobillas, que hacen contacto con los anillos, en el circuito del devanado del rotor, se puede introducir esta resistencia adicional suplementaria para variar la propiedad de arranque o de funcionamiento de la máquina; las escobillas permiten también cortocircuitar el devanado..
(20) CAPÍTULO 1. NOCIONES BÁSICAS. 10. Los motores de anillos se emplean a veces en cascada con otras máquinas. Los acoplamientos en cascada de la máquina asincrónica permiten regular suavemente la frecuencia de rotación entre amplios límites siendo alto el coeficiente de potencia. En la mayoría de los casos la resistencia adicional se introduce en el devanado del rotor sólo al poner en marcha el motor, lo que conduce al aumento del momento de arranque y a la disminución de las corrientes de arranque y facilita el arranque del motor. Durante el funcionamiento del motor asincrónico el reóstato de arranque debe ser totalmente desconectado y el devanado del rotor cortocircuitado. A veces los motores asincrónicos van dotados de un dispositivo especial que permite, una vez realizado el arranque, cerrar entre sí los anillos de contacto y levantar las escobillas. Con estos motores se logra elevar el rendimiento a cuenta de la exclusión de las pérdidas por rozamiento de los anillos contra las escobillas y las pérdidas eléctricas en el contacto de transición de las escobillas. El motor jaula de ardilla no requiere de ningún dispositivo o técnica especial para su arranque, pero acarrea los problemas mencionados anteriormente [9].. 1.1.2 El motor jaula de ardilla La máquina de inducción o asincrónica se define como una máquina eléctrica de tipo rotatorio que trabaja por efectos de inducción. El nombre de asíncrona o asincrónica se refiere a que no tiene sincronismo en la velocidad de los campos magnéticos del estator y del rotor; esto se debe a que el estator produce un campo magnético giratorio cuya velocidad es diferente a la que origina el rotor y no marcha a la misma velocidad. Cuando la velocidad angular del rotor es menor que la velocidad angular del estator, la máquina trabaja como motor, es decir, transforma la energía eléctrica en energía mecánica. Cuando la velocidad angular del rotor supera a la velocidad angular del estator, la máquina trabaja como generador, es decir, transforma la energía mecánica en energía eléctrica. El motor jaula de ardilla está formado por el estator, el rotor y partes auxiliares como la carcasa, flecha, tapas laterales, rodamientos, entre otras. El estator (fig. 1.3) es la parte fija de la máquina, está constituido por un núcleo y bobinas. El núcleo está hecho de laminaciones de acero al silicio con el objeto de reducir las pérdidas por histéresis y por corrientes parásitas. Las laminaciones son circulares en máquinas de baja capacidad, sin.
(21) CAPÍTULO 1. NOCIONES BÁSICAS. 11. embargo, en las de mayor capacidad, las laminaciones circulares son seccionadas y se van superponiendo una a una hasta formar la longitud de las ranuras que alojan al devanado de las fases [2].. Fig. 1.3 Estator de la máquina asincrónica. El devanado está formado por varias bobinas de conductor de cobre, prefabricadas y montadas simétricamente en las ranuras del núcleo alrededor de los 360° geométricos de las laminaciones [10]. Por su parte, el rotor (fig. 1.4) es la parte de la máquina que recibe la acción del campo magnético del estator y por lo mismo es donde se induce la fuerza electromotriz (fem). El rotor jaula de ardilla es el que más se utiliza por su sencilla construcción y su gran producción ya que eléctricamente casi nunca se llega a dañar. Se construye sobre la flecha de la máquina a base de laminaciones de acero al silicio troqueladas, al igual que el estator se van colocando una a una hasta lograr el cuerpo del rotor con las ranuras donde se alojarán las barras de la jaula. El devanado se forma con conductores de cobre o aluminio en forma de barra que se montan en las ranuras y los extremos se cortocircuitan por medio de anillos. Las ranuras son generalmente de boca semicerrada y ligeramente oblicua al eje.
(22) CAPÍTULO 1. NOCIONES BÁSICAS. 12. con la finalidad de que las barras corten con mayor uniformidad al campo magnético y su rendimiento se incremente [10].. Fig. 1.4 Rotor jaula de ardilla sobre su eje con rodamientos. La carcasa (fig. 1.5) es la cubierta de la máquina y sirve como soporte mecánico de las partes componentes de la misma. Se fabrican con aletas disipadoras de calor de una aleación de aluminio dúctil de alta resistencia mecánica. También existen carcasas sin aletas disipadoras de calor fabricadas con hierro dulce lo que las hace muy pesadas.. Fig. 1.5 Carcaza del motor. La flecha o eje (fig. 1.4) es la parte central del rotor, normalmente es de acero y es donde se montan y fijan las laminaciones del rotor. En su extremo se monta un abanico que al giro de la máquina proporciona una corriente de aire que enfría las partes internas debido.
(23) CAPÍTULO 1. NOCIONES BÁSICAS. 13. a que las corrientes que circulan por los devanados tienden a elevar su temperatura y a disminuir su rendimiento. Las tapas laterales (fig. 1.6) tienen como principal función soportar a la flecha por medio de rodamientos que van montados en la cavidad central de la tapa. Sirven para cerrar la máquina eléctrica, se fijan firmemente a la carcasa por medio de tornillos.. Fig. 1.6 Tapas laterales También relacionados con el eje están los rodamientos o cojinetes. Tienen la función de disminuir la fricción que origina la flecha al girar, generalmente son cajas de bolas prelubricadas y altamente pulidas (fig. 1.4). No requieren mantenimiento ya que siempre hay una película de aceite alrededor de los rodamientos. Hoy en día aún existen rodamientos de anillos que se lubrican cada determinado tiempo cuando es de un solo anillo. Cuando se emplean rodamientos de dos anillos de diferente diámetro, estos se introducen en un depósito de aceite llamado chumacera; un anillo soporta a la flecha y el otro de diámetro mayor gira por el movimiento de la flecha sumergiéndose en el aceite y bañando al otro anillo [10]. 1.2. El modelo de máquina eléctrica Para cualquier estudio de las máquinas eléctricas existen varios modelos. matemáticos disponibles, desarrollados precisamente para obtener una aproximación de la respuesta del motor ante determinadas circunstancias, todo a través de cálculos. El más preciso es, sin dudas, el exacto. Sin embargo, cuando están involucrados un número.
(24) CAPÍTULO 1. NOCIONES BÁSICAS. 14. apreciable de motores, en algunos casos, no se tiene interés en la respuesta de cada máquina individual, sino en el conjunto. Para estos casos es posible utilizar, sin errores apreciables, alguno de los otros modelos, posibilitando la reducción notable del tiempo de cálculo. Para obtener el diagrama del motor asincrónico, se deben tener presentes las condiciones del estator para obtener su circuito equivalente. Luego se agregará el del rotor. El voltaje de la red a la que se conecta el motor introduce las corrientes causantes del campo magnético giratorio en el entrehierro. Este genera entonces en las fases del estator fuerzas contraelectromotrices. balanceadas que difieren de la tensión en los terminales. debido a la caída de tensión por la impedancia en su devanado [2].. (1.1) La corriente del estator y. una. corriente. se divide en dos componentes, una corriente de excitación. de. carga. o. de. rotor. en. estado. estacionario. .. La corriente de excitación pasa por una rama en derivación la cual tiene una. resistencia. que. indica. paralelo con una reactancia por. las. en fase con. cuales. circula. e. las. pérdidas. en. el. núcleo. conectada. en. que indica la magnetización del núcleo y. respectivamente. una. corriente. que se encuentra retrasada 90° respecto a. que. se. encuentra. [7].. Esta representación de las pérdidas en el núcleo es de alta resistencia y muy. baja. reactancia. por. lo. que. la. impedancia. equivalente. al. estar. en. paralelo es de un valor mucho menor que la reactancia de magnetización; por lo anterior generalmente esta rama se considera despreciable [12]. La corriente del rotor aparece en él por la interacción de los flujos magnéticos. en. el. entrehierro. que. afectan. a. las. barras. de. la. jaula. generando una fem y con ello se origina la corriente mencionada [13]. Una vez analizado todo lo anterior, queda construida la parte del circuito equivalente perteneciente al estator..
(25) CAPÍTULO 1. NOCIONES BÁSICAS. 15. Fig. 1.7 Circuito equivalente del estator. Visto mediante. desde una. del devanado. el. estator,. impedancia. el. rotor. en. compuesta. estado por. estacionario. se. representa. reactancia. de. dispersión. la. en serie con la resistencia de la jaula o devanado. [2],que también por. ley Ohm es:. (1.2) Para determinar las corrientes y las tensiones en el rotor, éste se puede cambiar. por. otro. equivalente. que. tenga. el. mismo. número. de. fases. y. vueltas que el estator y que genere la misma fuerza magnetomotriz (fmm) y flujo en el entrehierro para que las condiciones vistas desde el estator no cambien. Así mismo al referir el rotor hacia el estator se debe considerar el deslizamiento de. entre. deslizamiento. ellos del. para rotor. que. las. tensiones. real. se. encuentren. y. corrientes inmersas. a en. frecuencia el. rotor. equivalente estacionario a frecuencia del estator [7]. Para esto son necesarios los parámetros del rotor real a frecuencia de deslizamiento. Teniendo en cuenta que antes del arranque, rotor y estator comparten la misma frecuencia, se tiene que la reactancia de dispersión del rotor es: (1.3).
(26) CAPÍTULO 1. NOCIONES BÁSICAS. Sustituyendo. 16. en la ecuación anterior se obtiene finalmente la reactancia. de dispersión del rotor referido a la frecuencia de deslizamiento. . (1.4). De esta manera la impedancia de dispersión del rotor a frecuencia de deslizamiento. es:. (1.5) La corriente del rotor a frecuencia de deslizamiento magnitud a la corriente del estator ya que la corriente. es igual en es la corriente en. un rotor equivalente que tiene el mismo número de vueltas por fase que el estator. La onda de fmm resultante en el entrehierro se debe a los flujos mutuos creados por las corrientes en el estator y por las corrientes en el rotor.. Tomando. en. cuenta. que. la. onda. de. fmm. resultante. en. el entrehierro se compone de la suma fasorial de la corriente del estator y la corriente del sus. respectivas. rotor equivalente, estas corrientes son iguales en fase en frecuencias. [7].. Por. tanto. se. puede. decir. que: (1.6) La interacción de flujos en el entrehierro genera tanto una fem una fuerza contraelectromotriz. en el rotor como. en el estator. La diferencia existente entre estas tensiones. radica en el efecto de la velocidad; entonces, para que estos potenciales sean iguales, la fuerza contraelectromotriz se puede multiplicar por el deslizamiento. (1.7) Siendo así, se tiene una nueva expresión para la impedancia del rotor a frecuencia de deslizamiento..
(27) CAPÍTULO 1. NOCIONES BÁSICAS. 17. (1.8) Dividiendo la ecuación (1.5) por esta última, se obtiene la impedancia del rotor equivalente.. (1.9) Para finalizar se considera el efecto de la carga en el eje del motor a través de una factorización en la ecuación anterior.. (1.10) (1.11) La resistencia denominada. no afecta a la impedancia del rotor; es la encargada de. representar la carga mecánica del motor a través del deslizamiento. Con este último paso queda representado el circuito equivalente de la máquina de inducción.. Fig. 1.8 Circuito equivalente de la máquina de inducción..
(28) CAPÍTULO 1. NOCIONES BÁSICAS. 18. 1.2.1 Modelo de máquina asincrónica en Simulink. El bloque Asynchronous Machine que se encuentra dentro del Simulink es un modelo dinámico de máquina asincrónica trifásica, también conocida como máquina de inducción. Se encuentra en la ruta Matlab/Simulink/SimPowerSystems/Machines. Este bloque opera de igual modo como motor o generador, siendo el modo de operación escogido a través del signo del torque mecánico; si es positivo, actúa como motor, de lo contrario, el bloque representará a un generador [3]. La parte eléctrica de la máquina está representada por un modelo espacio-estado de cuarto orden, mientras que la parte mecánica se representa por un sistema de segundo orden. Todos los parámetros y variables eléctricas se refieren al estator. El sistema eléctrico está conformado por una serie de modelos basados en el circuito equivalente de la máquina de inducción (fig. 1.9), así como en una serie de ecuaciones básicas que rigen el comportamiento del bloque (fig. 1.10).. Fig. 1.9 Modelo y ecuaciones que rigen el funcionamiento del bloque..
(29) CAPÍTULO 1. NOCIONES BÁSICAS. 19. Por su parte, el sistema mecánico está representado de forma similar, pero utilizando mucho menos ecuaciones (fig. 1.11):. Fig. 1.10 Ecuaciones del sistema mecánico. Los parámetros del bloque Asynchronous Machine están definidos en la siguiente tabla tomada de la extensa ayuda del software MatLab [14]: Tabla 1.1 Parámetros del bloque Asynchronous Machine..
(30) CAPÍTULO 1. NOCIONES BÁSICAS. 20. En realidad, el Simulink permite escoger entre dos bloques casi idénticos, que difieren solamente en el sistema de unidades a utilizar, por unidad o el internacional. En dependencia de la elección, el software convierte los parámetros ingresados a pu, pues el modelo de máquina asincrónica utiliza este método, siendo la opción de escoger no más que una facilidad brindada por el programa para su manejo [9]. El bloque permite su parametrización a través de una ventana auxiliar, algunos de los datos que se pueden ingresar son la potencia nominal, voltaje de línea, frecuencia, inductancias y resistencias del rotor y el estator, inductancia mutua, inercia, factor de fricción, pares de polos, e incluso el tipo de rotor. Para este proyecto se escogió, por supuesto, el rotor jaula de ardilla. Además, el bloque permite su parametrización a través de una serie de modelos preseleccionados de motores específicos.. Fig. 1.11 Ventana de propiedades del bloque. Una vez parametrizado el bloque, queda introducirle las señales de entrada, para lo cual el Simulink se ayuda de un sistema de diagramas, que permite la conexión entre diferentes bloques. En este caso, el de máquina asincrónica permite la entrada de un valor de torque y una alimentación trifásica; además, da como salida una serie de datos a los que se puede acceder a través de otras herramientas del programa. El diagrama de conexión será explicado detalladamente en el siguiente capítulo..
(31) CAPÍTULO 1. NOCIONES BÁSICAS. Fig.1.12 Vista del bloque como se muestra en la zona de trabajo del Simulink.. 21.
(32) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 22. CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 2.1. MatLab/Simulink como herramientas de simulación La elección de MatLab como software para programar viene dada debido a su historia. y evolución, así como a su elevada fiabilidad para el trabajo ingenieril. Sus creadores, actuando presionados por la necesidad de un lenguaje computacional más avanzado y desarrollado que FORTRAN o C, y que además pudiera facilitar el trabajo científico, combinaron conocimientos sobre matemática, ingeniería y computación para crear este programa. Además de sus fundadores Jack Little y Clive Moler, otros muchos científicos y especialistas han aportado al desarrollo de Matlab. Sus primeras versiones escritas en FORTRAN distan mucho de las actuales construidas en base a C. MatLab es un ambiente de cómputo, de alta ejecución numérica y de visualización, integra el análisis numérico, cálculo de matrices, procesamiento de señales, diseño de sistemas de potencia, mapeo y tratamiento de imágenes, instrumentación y adquisición de datos, identificación de sistemas, generación de gráficas, entre otras aplicaciones en un ambiente sencillo de utilizar, donde los problemas y sus soluciones son expresadas justamente como están escritas; a diferencia de la programación tradicional permite resolver problemas en una fracción de tiempo [1]. MatLab cuenta también con una serie de herramientas específicas llamadas toolboxes, dirigidas a aplicaciones específicas (una, sin dudas, de sus ventajas para el trabajo científico), y que sirven para resolver algunas clases particulares de problemas. El Simulink.
(33) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 23. es una herramienta para el modelaje, análisis y simulación de una amplia variedad de sistemas físico-matemáticos, con cierto grado de abstracción de los fenómenos físicos. Simulink presenta toda la funcionalidad que fue propósito en la creación de MatLab. Además, adiciona muchas características específicas a los sistemas dinámicos. El uso de Simulink presenta dos etapas de uso: la creación y definición del modelo en un ambiente completamente gráfico y el análisis de este [15]. La creación del modelo se lleva a cabo mediante el uso de diagramas de bloques. Estos están almacenados a una librería de bloques existentes que puede ser ampliada por el mismo usuario, desde donde se arrastran a la zona de trabajo para ser interconectados. Los archivos generados en Simulink presentan una extensión diferente a los de MatLab, aunque puedan ser vinculados mediante comandos. El uso de esta aplicación y su software madre en conjunto, crean resultados difíciles de duplicar en cuanto a su facilidad de obtención y fiabilidad, pero se debe dar mérito al Simulink en trabajos de simulación de sistemas dinámicos, pues el proceso recae casi completamente en él, dejando al MatLab la manipulación de parámetros y resultados. El modelado efectivo de los componentes y la simulación compleja de sistemas en este software se debe a las características con las que cuenta: . Extensas bibliotecas de bloques predefinidos, y su gran variedad de modelos ya construidos.. . Editor de gráficos interactivo, donde se ensamblan y manipulan los diagramas de bloques conformando circuitos.. . Capacidad de gestionar complejos diseños, segmentando los modelos en jerarquías de componentes de diseño.. . Explorador integrado para crear, buscar y configurar todo tipo de señales, parámetros, propiedades y códigos generados asociados al modelo.. . Interfaces de programación de aplicaciones que permiten conectar con otros programas de simulación e incorporar código escrito de manera manual.. . Bloques de funciones para implementar los algoritmos de MatLab en Simulink e implementar sistemas embebidos..
(34) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. . Modos de simulación para ejecutar simulaciones de forma interpretativa o. 24 a. velocidades de código C compilado. . Depurador y perfilador gráfico para examinar los resultados de simulación y diagnosticar el rendimiento y el comportamiento inesperado del diseño.. . Acceso completo a MatLab para analizar y visualizar resultados, personalizar el entorno de modelaje y definir señales, parámetros y datos de prueba.. . Herramientas de análisis de modelos y diagnóstico para garantizar la coherencia de los estos e identificar errores de modelaje.. . Selección de parámetros y métodos de simulación, para hacer el proceso totalmente personalizable y ajustable a las necesidades del usuario. Tanto en el estudio de la electricidad, como en otros, es habitual la simulación de. procesos para estudiarlos tomando en cuenta sus resultados. En el caso de la Ingeniería Eléctrica, la simulación de circuitos y otros sistemas se lleva a cabo antes de su realización física, y las aplicaciones informáticas son de gran ayuda para la verificación del comportamiento de estos [16]. Las dos tareas principales del presente proyecto son, en primer lugar, la creación del modelo que posibilite simular el funcionamiento del motor asincrónico de jaula de ardilla y, en segundo lugar, la construcción de una interfaz gráfica de usuario que permita una parametrización y recolección de datos de una manera más sencilla y amigable. La presentación de las gráficas de comportamiento de la máquina eléctrica se programa en un fichero de MatLab, mientras que la simulación ocurre en el Simulink. Aunque este último permite cambiar los parámetros de los bloques que se utilizan accediendo a la ventana de propiedades de cada uno, lo que se desea es permitir la parametrización de todo el modelo desde un solo lugar: la interfaz gráfica de usuario (GUI). Se debe tener en cuenta que lo que se desea no es modelar el motor asincrónico jaula de ardilla, pues el Simulink posee un modelo de alta calidad de esta máquina eléctrica (del que se habla en el primer capítulo de esta tesis), sino crear un diagrama que posibilite la recolección de los datos resultantes de la simulación para analizar el comportamiento del sistema..
(35) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 25. Vale la pena aclarar que existen numerosos softwares para simular componentes y sistemas eléctricos, incluso en los últimos años se ha visto un acelerado crecimiento de aplicaciones simuladoras de circuitos eléctricos para teléfonos móviles inteligentes (smartphones). Sin embargo, aunque MatLab/Simulink no está orientado específicamente a esta rama de la ciencia por ser una aplicación de objetivos más generales, posee la librería SimPowerSystems (conocida como PowerSystemsBlockset en versiones anteriores), creada para el trabajo con circuitos eléctricos y convertidores de Electrónica de Potencia. Desde diodos y tiristores, componentes pasivos (R, L, C), y convertidores hasta algunas máquinas eléctricas, siendo una de estas la utilizada en el presente proyecto, la librería es una colección de bloques al servicio del ingeniero eléctrico [17]. El sistema a simular se crea conectando de una manera adecuada los bloques apropiados de la librería anteriormente mencionada, además de otros componentes de librerías más generales. No es necesario entonces crear modelo matemático alguno, pero sí definir claramente en el diagrama cuáles son los datos con los que se desea trabajar. Simulink está pensado para permitir la construcción de un completo laboratorio virtual. En lo restante de este capítulo se hará una descripción detallada del proceso de creación del programa y las herramientas que fueron utilizadas para lograrlo. 2.2. Desarrollo del software Se ha explicado ya la división del proceso de creación del programa en dos partes. fundamentales: la desarrollada en el Simulink, donde se construye el modelo del sistema a simular, en este caso no solo el motor, sino también las cargas mecánicas y las herramientas de medición, y la desarrollada en MatLab. Es esta última la responsable de ingresar los datos al modelo a través de una interfaz gráfica y mostrar los resultados de una manera más amigable. Para crearla se utiliza una herramienta integrada del MatLab llamada GUIDE. Esta es una poderosa plataforma de programación similar a VisualBasic4, con la ventaja de utilizar las funciones de MatLab y poderse conectar mediante líneas de códigos con los modelos del Simulink, funcionalidad esta que es de gran ayuda en el desarrollo de este proyecto..
(36) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 26. Al igual que en VisualBasic4, en GUIDE basta con tomar los controles mostrados a un lado del área de trabajo (la que será ventana del programa a crear) y arrastrarlos hacia el sitio deseado, conformando el diseño de cuadros de diálogos, pop-up menús, botoneras y toda clase de elementos necesarios para satisfacer las necesidades del usuario. Por supuesto, con esto solo se ha creado la parte gráfica del software, toca luego el trabajo más arduo, programar las acciones de cada elemento incluido. En este caso será necesaria la colecta de datos previa a su carga en el modelo. Para ello GUIDE, al ser terminada la ventana, crea dos archivos: uno de extensión ‘‘.fig’’, donde se tiene la descripción gráfica de los componentes y parte visual del GUI y otro de extensión ‘‘.m’’, que contiene la definición de las funciones y controles así como los callbacks o acciones que llevará a cabo cada objeto de la interface. Estas acciones son llamadas comúnmente ‘‘eventos’’ en programación. Es en este archivo donde se encuentra la parte lógica del GUI. Los eventos son provocados por el usuario, son la respuesta lógica a las acciones sobre la interface [18]. Una de las ventajas más grandes que tiene el uso de GUIDE, es la posibilidad de modificar la ventana en busca de mejorar las prestaciones del software sin tener que hacer cambio alguno al modelo. 2.2.1 Construcción de la interfaz gráfica La construcción de la interfaz se puede lograr de varias maneras, como sea MatLab mostrará un área vacía que puede ser redimensionada a antojo del programador y una serie de opciones y herramientas necesarias para completar el trabajo (fig. 2.1). En la parte superior de la ventana se puede encontrar la barra de menú y las opciones más comunes, mientras que en la zona izquierda se encuentran los controles a incluir, llamados objetos en programación. En la parte central se encuentra el área donde se diseñará lo que se desea ver finalmente en el programa. Cada objeto agregado al área de trabajo posee propiedades personalizables que enriquecen el resultado final; desde colores de fondo y posibilidades de redimensionar, hasta tipos de fuentes y leyendas que emergen al posicionar el cursor sobre este..
(37) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 27. Fig. 2.1 Ventana principal de GUIDE. Para acceder a las propiedades de los objetos se utiliza el inspector de propiedades, herramienta ubicada en la parte superior de GUIDE, o bien se pulsa doble clic sobre este. La ventana que emerge contiene todas las opciones necesarias, variando en función del objeto pues no todos tienen las mismas. Una que si está presente en cada elemento a utilizar es ‘‘Tag’’. Esta es la que permite diferenciar los controles dentro de la parte lógica del programa (el archivo .m). Su función es nombrar cada uno permitiendo su manipulación mediante los comandos de la programación. El archivo .m se genera automáticamente al crear un GUI, además también de manera automática dentro de dicho archivo se definen los objetos que se han colocado gráficamente en el área de trabajo. Para la construcción del programa que es objeto de esta tesis, se utilizaron los siguientes controles: . Edit Text: Recuadro que permite la inclusión de cadenas de datos en forma de caracteres..
(38) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. . 28. Static Text: Cuadro de texto que permite la inserción de un texto estático; por ejemplo, el nombre de algún elemento o una nota para su uso.. . Push Button: Es un botón convencional, que realiza una acción (evento) al ser pulsado.. . Pop-up Menu: Menú desplegable que permite la selección entre varias opciones.. . Axes: Recuadro responsable de mostrar gráficos e imágenes.. . Panel: Marco que permite la agrupación de otros controles que comparten características u objetivos. Sirve solamente para estilizar la ventana y es el único objeto que no se programa o modifica desde el archivo .m. Con todos los elementos en su lugar el resultado final se muestra a continuación:. Fig. 2.2 Interfaz gráfica concluida en GUIDE. A continuación, se muestra el software funcionando para luego describir cada sección del programa y detallar su funcionamiento. Como se observa en la fig. 2.3 el aspecto de este es similar al de cualquier otra aplicación. Gracias a su programación, al abrirlo, se llama al modelo del Simulink, quedando conectados automáticamente y permitiendo la modificación del segundo a través del primero, así como la visualización de sus resultados..
(39) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 29. Fig. 2.3 Aspecto del software en funcionamiento. El panel ‘‘Parámetros del motor’’ (fig. 2.4) permite la parametrización del bloque Asynchronous Machine, usado en el modelo creado en Simulink. Para ello cuenta con un menú desplegable que permite seleccionar entre una parametrización por defecto (de un motor de 3 HP), para aquellos que no estén interesados en analizar un motor específico, y una personalizada que permite la entrada de nuevos datos desde bloques editables.. Fig. 2.4 Panel ‘‘Parámetros del motor’’ y sus dos opciones principales: parametrización por defecto (izquierda) y personalizada (derecha)..
(40) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 30. Por su parte, el panel ‘‘Carga y simulación’’ (fig. 2.5) permite escoger entre tres estados de carga específicos que se pueden simular: arranque en vacío, arranque a carga constante y régimen permanente. La selección se lleva a cabo nuevamente a través de un menú desplegable y en dependencia de la simulación escogida, se activan o desactivan opciones. Desde este panel se pueden parametrizar las características de la carga. Los tipos de carga posibles de simular en régimen permanente (constante y pulso) también pueden ser seleccionados desde un menú desplegable. Los datos se ingresarán al igual que en el panel anterior, por medio de los edit texts de GUIDE.. Fig. 2.5 Panel ‘‘Carga y simulación’’ y sus opciones, de izquierda a derecha: arranque en vacío, arranque con carga constante y régimen permanente. En este panel se encuentran también dos recuadros donde introducirle al modelo el tiempo que debe trabajar y cada cuánto tomar las muestras, y un botón responsable de cargar todos los datos recogidos en la interfaz y poner a correr la simulación. El tiempo se escribirá en segundos y microsegundos respectivamente y se debe tener en cuenta que, en ciertos casos, un largo tiempo de simulación puede no dar los resultados esperados, pues hay eventos que ocurren en milésimas de segundos y pueden no notarse debido a esto..
(41) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 31. Fig. 2.6 Panel ‘‘Análisis del torque’’. La interfaz cuenta además con seis botones distribuidos en dos paneles. El primer panel ‘‘Análisis del torque’’ (fig. 2.6), contiene los controles capaces de mostrar las gráficas características de torque contra revoluciones por minuto y torque contra tiempo. El segundo, ‘‘Análisis de las corrientes’’ (fig. 2.7), tiene la misma función, mostrando esta vez el comportamiento de las corrientes en el estator. Todos toman las variables necesarias de los resultados de la simulación y las grafican posibilitando su estudio por el usuario. Para utilizar cualquiera de los controles que muestran los resultados del modelo, primeramente, se debe esperar a que la simulación concluya, de lo que se tendrá conocimiento al escuchar un sonido emitido por el programa. Las orientaciones para el uso correcto del software serán objeto del último epígrafe de este capítulo.. Fig. 2.7 Panel ‘‘Análisis de las corrientes’’. Por último, el software cuenta con un axes (fig. 2.8), elemento del que se precisa para mostrar una imagen del modelo. Este no es más que un área en blanco donde aparecerá la figura cargada dentro de un sistema de coordenadas..
(42) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 32. Fig. 2.8 Área donde se muestra la imagen del modelo. 2.2.2 Construcción de la interfaz gráfica. El centro del modelo lo constituye el bloque Asynchronous Machine (fig 1.3), descrito en el primer capítulo y nombrado Motor dentro del diagrama. Este es el encargado de simular el comportamiento de la máquina y presenta todos los parámetros necesarios para hacerlo. El único requerimiento está en pasarle estos datos, para lo cual es imprescindible tener ciertos conocimientos de máquinas eléctricas con el fin de ahorrarse un resultado absurdo. La parametrización de los bloques, pues Asynchronous Machine no es el único que lo demanda, se puede llevar a cabo de dos maneras: directamente desde Simulink, en una ventana que emerge dando doble clic sobre el objetivo, o a través del Matlab (en este caso el archivo .m), utilizando el comando set_param. Este permite cambiar los datos indicados por el usuario en un bloque determinado. La interfaz permite manipular estos datos, pues está conectada al archivo .m y a los comandos que contiene. Al manipular los parámetros desde MatLab se debe tener conocimiento del nombre asignado al bloque dentro del diagrama. Además, las diferentes características internas de.
(43) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 33. las que disponen los bloques o modelos tienen también un nombre, permitiendo que se conviertan en simples variables programables que puedan ser modificadas a voluntad antes de iniciar la simulación. Es a través de estos nombres que el comando set_param logra localizar el parámetro deseado y cambiarlo. En la fig. 2.9 se puede apreciar cómo quedan los datos pertenecientes a Asynchronous Machine al ser parametrizado con los valores ‘‘por defecto’’ (fig. 2.4). Cómo se puede apreciar, los parámetros deben ser ingresados en forma de vector unidimensional. En la pestaña de configuración aparece la opción de utilizar un modelo prestablecido, pero como no es objetivo de esta tesis, la opción escogida es ‘‘No’’. Para la entrada mecánica se escogió ‘‘Torque Tm’’ y para el marco de referencia se escogió el ‘‘Rotor’’. Esta última especifica el sistema de referencia que se utiliza para convertir los voltajes de entrada al marco de referencia dq y las corrientes de salida al marco de referencia abc.. Fig. 2.9 Valores ‘‘por defecto’’ para el bloque Asynchronous Machine..
(44) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 34. Dentro de la ventana ‘‘Parameters’’ se pueden encontrar los siguientes datos: . Nominal power: Potencia nominal del motor Pn.. . Voltage (line-line): Voltaje nominal de línea Vn.. . Frequency: Frecuencia nominal de la red de alimentación fn.. . Statorresistance: Resistencia del devanado estatórico Rs.. . Statorinductance: Inductancia del devanado estatórico Lls.. . Rotor resistance: Resistencia del devanado rotórico Rr’ referida al estator.. . Rotor inductance: Inductancia del devanado rotórico Lr’ referida al estator.. . Mutual inductance: Inductancia entre los bobinados de estado y rotor Lm.. . Inertia: Inercia del rotor.. . Friction factor: Factor de fricción al giro del rotor.. . Pole pairs: Pares de polos. Para concluir, el bloque permite trabajar con núcleos magnéticos saturados y. condiciones iniciales. El análisis bajo saturación no es objetivo de esta tesis. En cuanto a las condiciones iniciales, son muy importantes cuando se realizan simulaciones en estado permanente, ya que en ese caso se necesita de las condiciones una vez arrancado. Sin embargo, para el software creado no serán necesarias estas características, pues está diseñado para simular el comportamiento del motor desde el arranque. Al simular cualquier caso para régimen permanente, se podrá observar de todas maneras la sección de gráfica perteneciente al arranque. Una vez terminada la parametrización del bloque, queda interconectarlo con los demás. Asynchronous Machine simula el comportamiento de una máquina eléctrica asincrónica, permitiendo jugar con sus características para semejarse lo más posible a la realidad. Sin embargo, no muestra los resultados de la simulación, ni permite configurar la carga que será acoplada. Para ello, Simulink cuenta con una amplia colección de herramientas que permite solucionar cualquier problemática que se presente en el proceso de modelaje. Es entonces cuando se deben crear vínculos entre estos bloques, de forma.
(45) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 35. similar a como se conectan los elementos de un laboratorio. En la fig. 2.10, se muestra el modelo resultante y a continuación una descripción de cada herramienta y la función que ocupa dentro del sistema creado. Es necesario aclarar que en Simulink todo archivo toma el nombre de ‘‘modelo’’, aun cuando contenga otro dentro (en este caso, el Asynchronous Machine).. Fig. 2.10 Modelo utilizado para recoger los resultados entregados por el motor y configurar las señales de entrada. Primeramente, está el bloque responsable de alimentar al motor. Su nombre es ThreePhase Programmable Voltage Source; en español, Fuente Trifásica Programable de Voltaje. En combinación con node 10, que no es más que la referencia cero del circuito, es la entrada de tensión al modelo de la máquina (fig. 2.11). Se le debe configurar Vrms, fase y frecuencia. Será utilizada como fuente ideal con los parámetros anteriores constantes en el tiempo y sin armónicos. Se encuentra en Simulink/SimPowerSystems/ElectricalSources.. Fig. 2.11 Combinación Three-Phase Programmable Voltage Source-node 10.
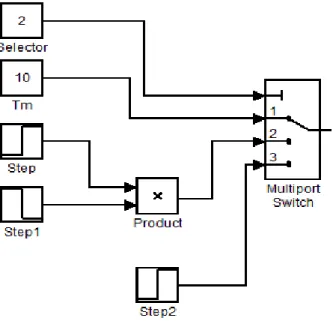
(46) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 36. Multiport Switch (fig. 2.12), ubicado en Simulink/SignalRouting es un interruptor que varía en dependencia del valor que le entre por su terminal superior. Su función en el modelo es la de escoger el tipo de carga. Si se le introduce el valor 1 el torque que le llegará al motor será constante (Arranque en vacío y a carga constante). Si el valor es 2, la simulación será en régimen permanente con carga tipo pulso. El tercer puerto permite la entrada de carga constante en el régimen permanente.. Fig. 2.12 Interruptor multipuerto utilizado en el modelo. La orden para cambiar de puerto, es introducida a través de un Constant, encontrado en Simulink/CommonlyUsedBlocks. El bloque en sí no tiene ninguna propiedad especial. Entrega una salida constante y se utiliza también para dar valor al torque de la máquina. En el modelo se le nombra Tm al responsable de esto último, mientras que al que hace conmutar al interruptor se le llama Selector (fig. 2.13).. Fig. 2.13 Constantes utilizadas: valor constante de torque (izquierda), señal para conmutar el interruptor (derecha). El bloque Step (Simulink/Sources), entrega una señal en escalón. Se puede ver tres veces en el diagrama, siendo usado para configurar las cargas en régimen permanente. En la fig.. 2.14. se. observa. la. combinación. de. estos. con. un. bloque. Product.
(47) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 37. (Simulink/CommonlyUsedBlocks) para crear una salida tipo pulso. Se le debe configurar el tiempo, así como los valores inicial y final. Estos parámetros son perfectamente manipulables desde la interfaz.. Fig. 2.14 Combinación de bloques responsable de simular la carga del motor. Justo en el centro del modelo de la fig. 2.10 se observa un bloque solitario nombrado powergui que llama la atención por ser el único que no se conecta a los demás componentes del. diagrama.. Es. completamente. imprescindible. para. utilizar. la. biblioteca. SimPowerSystems y se utiliza para almacenar el equivalente del circuito para Simulink que representa. las. ecuaciones. de. espacio-estado. del. modelo.. Se. encuentra. en. Simulink/SimPowerSystems. Hasta ahora, los elementos descritos han sido los seleccionados para introducirle las señales necesarias al modelo de máquina asincrónica. Por otra parte, el diagrama cuenta con una serie de bloques de los que depende la recolección de datos de salida (fig. 2.15), con los cuales se pueden obtener los resultados deseados, en este caso, las gráficas de comportamiento. Para realizar la colecta, primeramente, se debe conectar un Bus Selector (Simulink/CommonlyUsedBlocks) al terminal de salida del motor. Este posibilita elegir entre más de veinte datos y permite su salida hacia otros bloques. En el caso tratado, las señales escogidas son las tres corrientes estatóricas, la velocidad del rotor y el torque.
(48) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 38. electromagnético. El bloque Mux (Simulink/CommonlyUsedBlocks) une las tres corrientes en una misma señal, con el fin de guardar los datos en una estructura nombrada Iabc. El torque y la carga también pasan por este proceso.. Fig. 2.15 Fracción del diagrama construida para recoger los resultados de la simulación. Los bloques faltantes son Gain (Simulink/CommonlyUsedBlocks) y To Workspace (Simulink/Sinks). El primero convierte la señal de velocidad a revoluciones por minuto, justo antes de entregarla al segundo, que la guarda en forma de estructura dentro del MatLab. Esto mismo se le hace a Iabc y al conjunto torque-carga. Vale aclarar que las variables y estructuras contenidas en este software no pueden ser usadas por la interfaz creada, por tanto, deben primero ser declaradas globales. Para ello, se le deben incluir algunas líneas al código. 2.3. Manual de uso. El objetivo de crear una interfaz que permita comunicarse con un modelo de Simulink es, precisamente, facilitar la configuración de los elementos y la visualización de los resultados, además de brindar al usuario un ambiente más amigable para trabajar. De no haber sido desarrollada, la parametrización del modelo tendría que llevarse a cabo bloque por bloque y las gráficas deberían ser llamadas desde el MatLab introduciendo comandos cada vez que se desee analizar una u otra. Con el software creado, tanto la configuración.
(49) CAPÍTULO 2. IMPLEMENTACIÓN DEL SOFTWARE DE SIMULACIÓN. 39. como la muestra de resultados pueden realizarse desde un mismo lugar, acortando el tiempo necesitado para estos procesos. Para dar uso al programa, lo primero es abrirlo y escoger los parámetros del motor. Luego, se escoge el tipo de simulación. En el caso de arranque en vacío, todos los parámetros de simulación aparecen deshabilitados, por el hecho de no ser personalizables. Ya el arranque a carga constante permite ingresar el valor de la carga (Tm (N-m)). Ambos casos pueden ser contemplados en la fig. 2.4. En el caso de la simulación en régimen permanente, el programa permite escoger entre dos tipos de cargas: constante y en pulso. La primera (fig. 2.16 izquierda) permite ingresar las condiciones iniciales del motor, así como el torque inicial, que puede ser cero si el arranque es en vacío; y el final, que también puede tomar este valor para representar un desacople total de la carga mientras el motor funciona en régimen estable. El parámetro tb, no es más que el momento donde se acopla o desacopla la carga.. Fig. 2.16 Parámetros de la simulación en régimen permanente: carga constante (izquierda) y pulso de carga (derecha). En el caso del pulso de carga, se habilitan todas las opciones anteriores, además, se puede manipular ta. Esta vez, ta y tb son los tiempos donde comienza y termina el pulso respectivamente. En caso de parametrizar estos momentos en forma inversa, es decir, con el.
Figure




+7





Documento similar